
An On-Demand Web Tool for the Unsupervised Retrieval of Earth’s Surface Deformation from SAR Data: The P-SBAS Service within the ESA G-POD Environment

 , and
, and
Abstract
:
1. Introduction
2. Unsupervised P-SBAS Processing Chain Implementation

- -
- Identify, within the input SAR dataset, data that are acquired at the same epoch but that partially cover the user’s Area of Interest (AoI) and to evaluate the possibility to mosaic them for increasing the investigated area spatial coverage. This feature also permits to automatically discard SAR acquisitions that do not cover the selected AoI. Note that the mosaicking can be performed on adjacent frames of the same track, but not across different tracks;
- -
- Identify and analyze only the portion of SAR data that cover the AoI, thus reducing the amount of data to be processed and, consequently, the elapsed computing time;
- -
- Select, among the overall SAR acquisitions, the master image, which is used to identify a reference geometry to minimize the possible error sources during the DInSAR processing. The master image is selected as the closest to the barycenter of the SAR data acquisition distribution in the temporal/perpendicular baseline plane;
- -
- Improve the precision of the orbit metadata, e.g., the acquisition start time, by making use of DEM information. Indeed, an incorrect knowledge of the acquisition start time basically translates in a rigid misalignment between the DEM and the SAR acquisitions. To calculate this residual rigid shift, the implemented algorithm first selects an area with high coherence and high phase gradient, within an interferogram less affected by deformation (short temporal baseline) and sensitive to the topography (i.e., with a relatively high perpendicular baseline). Then, it performs a cross-correlation between the phase gradients of the so identified interferogram and the synthetic topography phase computed from the DEM. The peak of the cross-correlation identifies the requested shift;
- -
- Refine the user-selected reference point of the displacement time series by looking for the one that is affected by the lowest noise level (as defined in [16]) in a surrounding area, thus improving the degree of accuracy of the final DInSAR results. To this aim the algorithm performs, for each interferogram, the phase unwrapping procedure of a patch around the user selected reference point. The point with the higher temporal coherence is then identified as the new reference;
- -
- Select the pixels to be unwrapped by properly identifying only those that are not significantly affected by noise, thus improving the quality of the final results, taking into account the spatial coherence of each pixels in each data pair;
- -
- Evaluate the temporal coherence threshold, in dependence of the number of the exploited SAR acquisitions, according to an empirical relationship derived from an extensive analysis of ESA C-band SAR data.
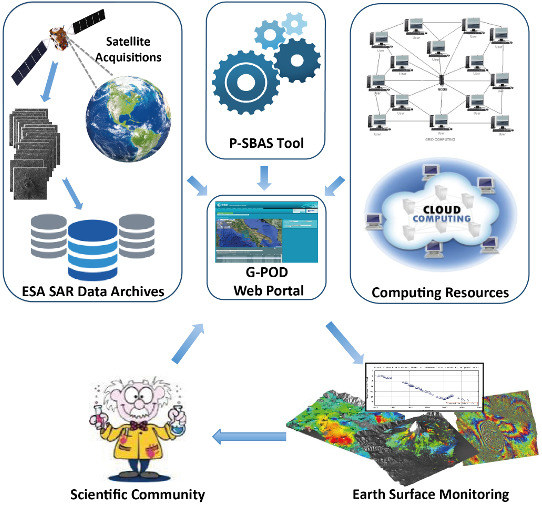
3. G-POD Environment
- -
- A single Computing Element (CE), which acts as a master node in terms of job scheduling policy control;
- -
- Several Worker Nodes (WNs), which provide the required computation capability;
- -
- The Storage Elements (SE), where the overall archived data are stored.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ESRIN-ESA | IREA-CNR | |
|---|---|---|
| Worker Nodes | 15 | 15 |
| Virtual CPU | 60 | 30 |
| CPU Type | Intel(R) Xeon(R) X5650 2.67 GHz | Intel(R) Xeon(R) E5-2680 2.70 GHz |
| RAM /WN | 32 | 64 |
| Storage | 2TB | 4TB |
| Network | 1 Gbps | 1 Gbps |
4. The P-SBAS Web Tool within the G-POD Environment
4.1. P-SBAS Web Tool: Implementation
- -
- A preliminary study of the algorithm aimed at identifying the main independent processes in which it can be decomposed in order to design the proper application workflow;
- -
- The implementation of the defined workflow in Linux Bash (LB) program language according to the tasks scheduling policy adopted within the G-POD environment. As a result, a set of LB scripts manages the entire P-SBAS algorithm by properly scheduling the different processing steps and, for each parallel step, by correctly distributing the concurrent jobs among the available WNs;
- -
- The implementation of the LB scripts for executing the processing steps that constitute the P-SBAS workflow and that are launched on the different WNs;
- -
- The definition and implementation of the web user interface, which allows the configuration and selection of input parameters, thresholds, processing settings, etc.;
- -
- The identification of the whole processing outputs and the implementation of appropriate procedures to collect and make them available for download at the end of the DInSAR processing.
4.2. P-SBAS Web Tool: Features and Characteristics
- -
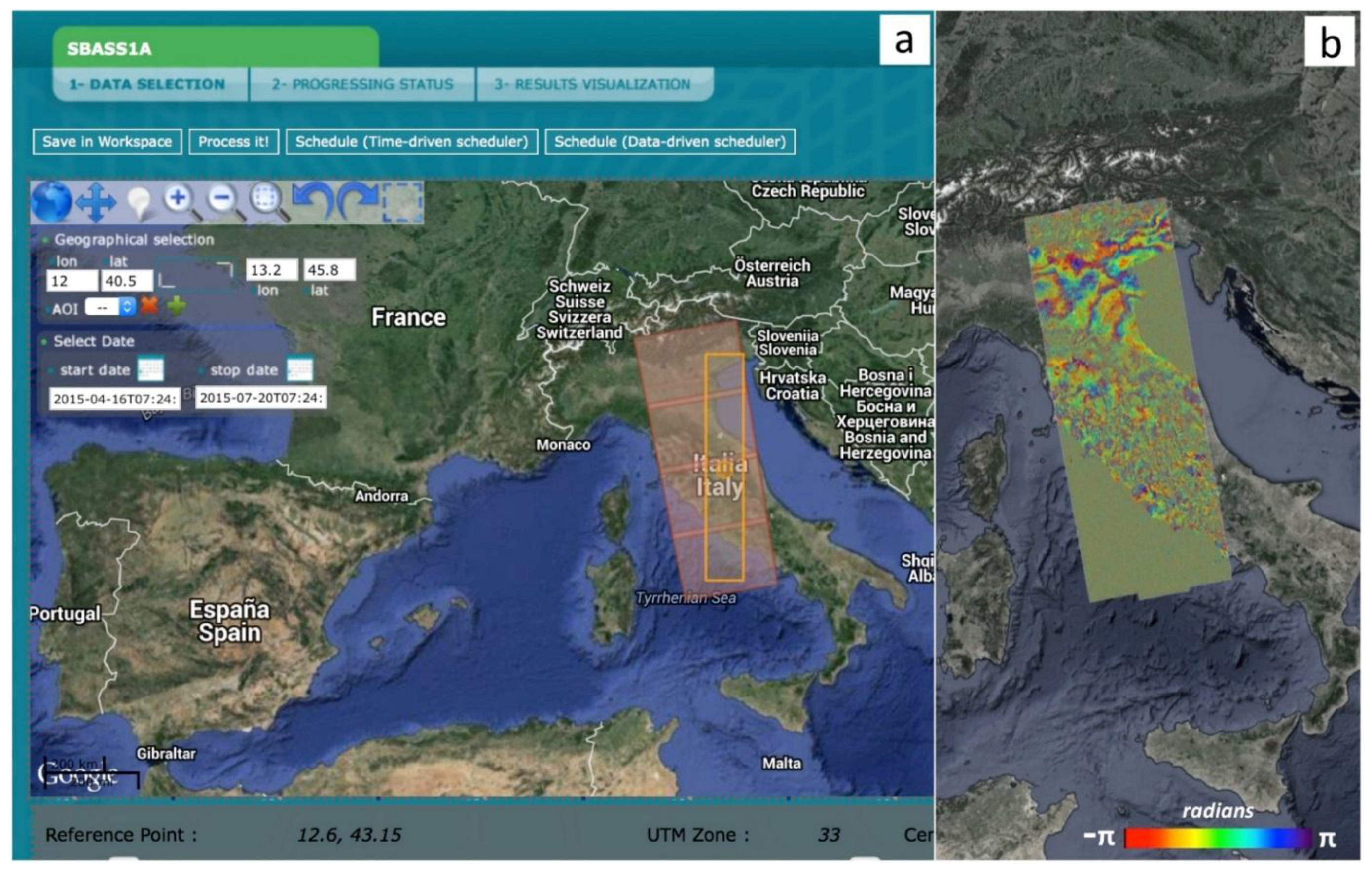
- Select the computing facilities/resources among those available through the platform, insert the interferometric task caption, select where the final results will be made available to the user, and set the task priority (Figure 2a);
- -
- Select the AoI to be processed and the DInSAR reference pixel. The AoI selection is made via a bounding box over an interactive geographical map client (Figure 2b). Instead, the reference point selection is carried out by shifting a place mark over the map client. It is anyway possible to insert geographic coordinates of a known point in the appropriate fields. As a general hint for the reference point selection, it is strongly suggested that it will be located in a stable and (expected) coherent area;
- -
- Indicate the temporal span used for the subsequent SAR raw data catalogue querying (Figure 2c);
- -
- Select the ESA data catalogue from which the SAR acquisitions are automatically retrieved. The Virtual Archive 4 (VA4) catalogue [22] is the main source of SAR data for the P-SBAS web tool. VA4 is composed by subsections containing the ENVISAT ASAR and the ERS-1/2 data, the latter being present in both CEOS and ASAR formats. Moreover the possibility to select data by relative orbit number is also provided (Figure 2d);

- -
- Optionally, enter some basic interferometric SAR parameters such as: spatial and temporal baseline thresholds, approximate size (in meters) of the resulting ground pixel, filtering coefficient and noise thresholds (Figure 2e). It is strongly suggested that users skilled on DInSAR processing perform the setting of these parameters. However, to simplify this task for less expert users, default values for each parameter are also provided. It is worth highlighting that these default values are the result of extensive and long-term analyses of ESA C-band data and are suitable for a large part of case studies.
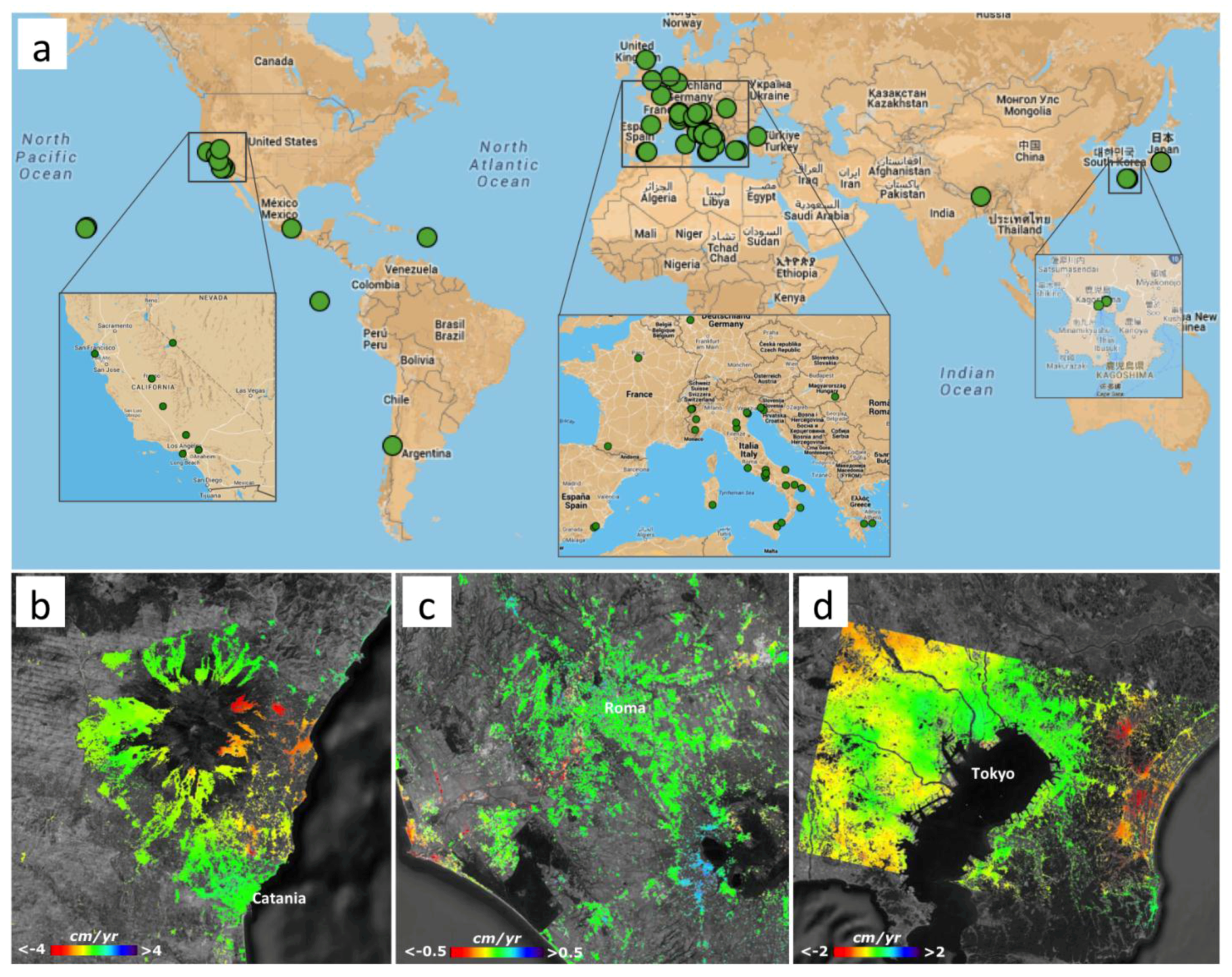
5. Experimental Results

| Site * | Images | Interf | Coherent Pixels | Elapsed Time (day) |
|---|---|---|---|---|
| Tokyo | 29 | 86 | 407600 | 0.66 |
| Los Angeles | 44 | 127 | 661614 | 1.46 |
| Hawaii_471 | 37 | 106 | 1105564 | 1.41 |
| Hawaii_200 | 42 | 123 | 446053 | 0.87 |
| Hawaii_408 | 36 | 105 | 544544 | 0.80 |
| Hawaii_343 | 20 | 50 | 405365 | 0.52 |
| Hawaii_136 | 15 | 34 | 448017 | 0.50 |
| Hawaii_114 | 19 | 33 | 681393 | 0.44 |
| S. Francisco | 43 | 126 | 282653 | 0.92 |
| Galápagos | 63 | 187 | 617029 | 2.11 |
| London | 49 | 138 | 282496 | 0.87 |
| Homs_307 | 34 | 93 | 288442 | 0.60 |
| Homs_78 | 33 | 94 | 136727 | 0.54 |
| Long Valley | 50 | 131 | 619025 | 1.99 |
| Roma | 39 | 112 | 126059 | 0.62 |
| Ferrara | 20 | 51 | 113850 | 0.74 |
| Paris | 50 | 148 | 253886 | 1.02 |
| Atene | 44 | 76 | 124758 | 0.48 |
| Amsterdam | 73 | 221 | 143743 | 1.13 |
| Messico City | 50 | 140 | 284014 | 0.97 |
| Racconigi | 34 | 92 | 157682 | 0.96 |
| Napoli_36 | 57 | 168 | 119159 | 0.85 |
| Fresno | 32 | 91 | 193371 | 0.63 |
| Lorca | 27 | 75 | 576065 | 1.48 |
| Sacramento | 42 | 118 | 130383 | 0.89 |
| Copahue_261 | 31 | 92 | 133150 | 0.47 |
| Atacama | 18 | 46 | 1645812 | 1.24 |
| Turkey | 29 | 81 | 115342 | 0.71 |
| Delano | 34 | 98 | 193977 | 1.48 |
| Average | 38.03 | 104.89 | 387509.41 | 0.94 |


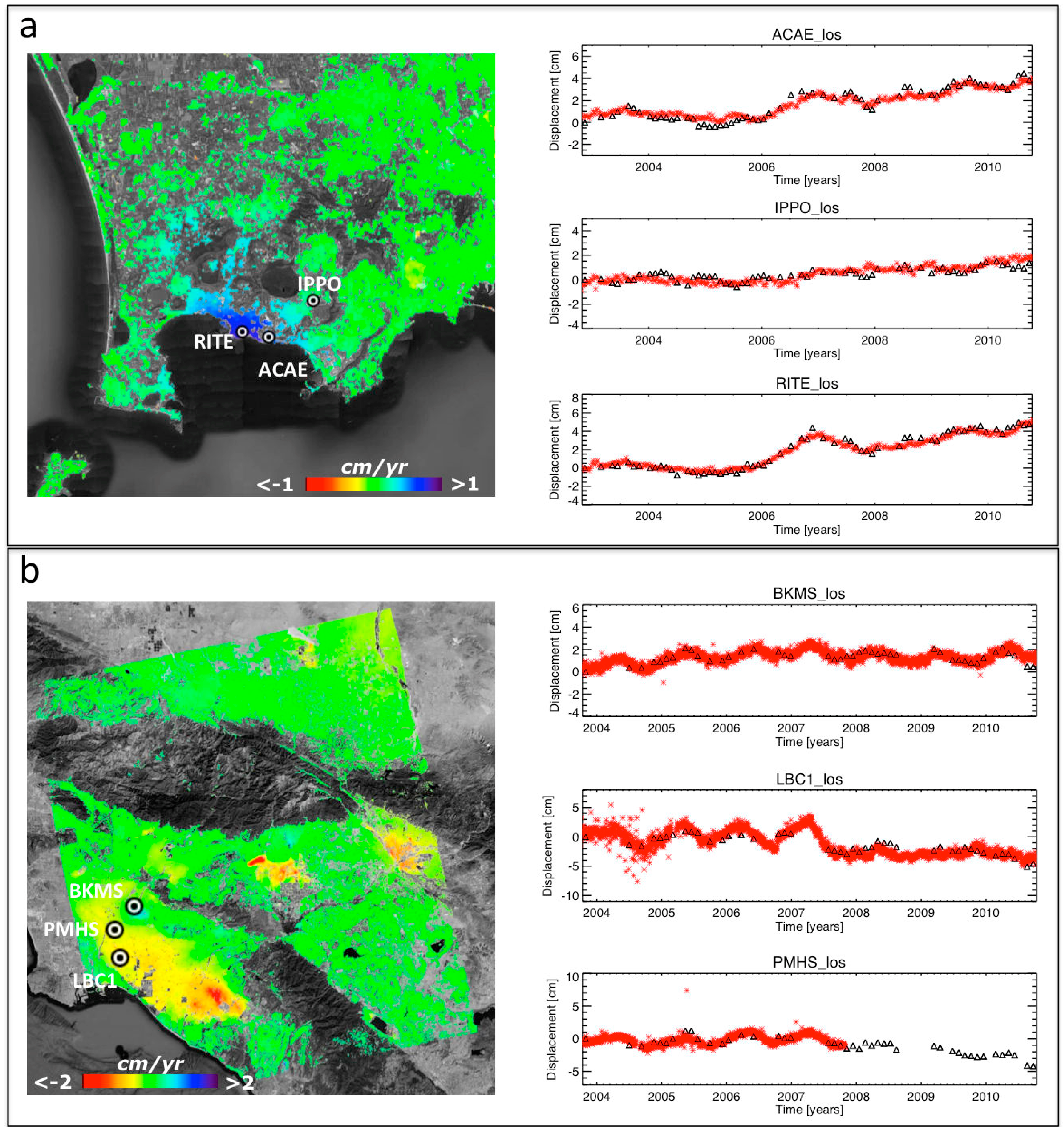
| Test Site | GPS Station | Standard Deviation of the Difference between SAR and LOS-Projected GPS Measurements (cm) | Test Site | GPS Station | Standard Deviation of the Difference between SAR and LOS-Projected GPS Measurements (cm) |
|---|---|---|---|---|---|
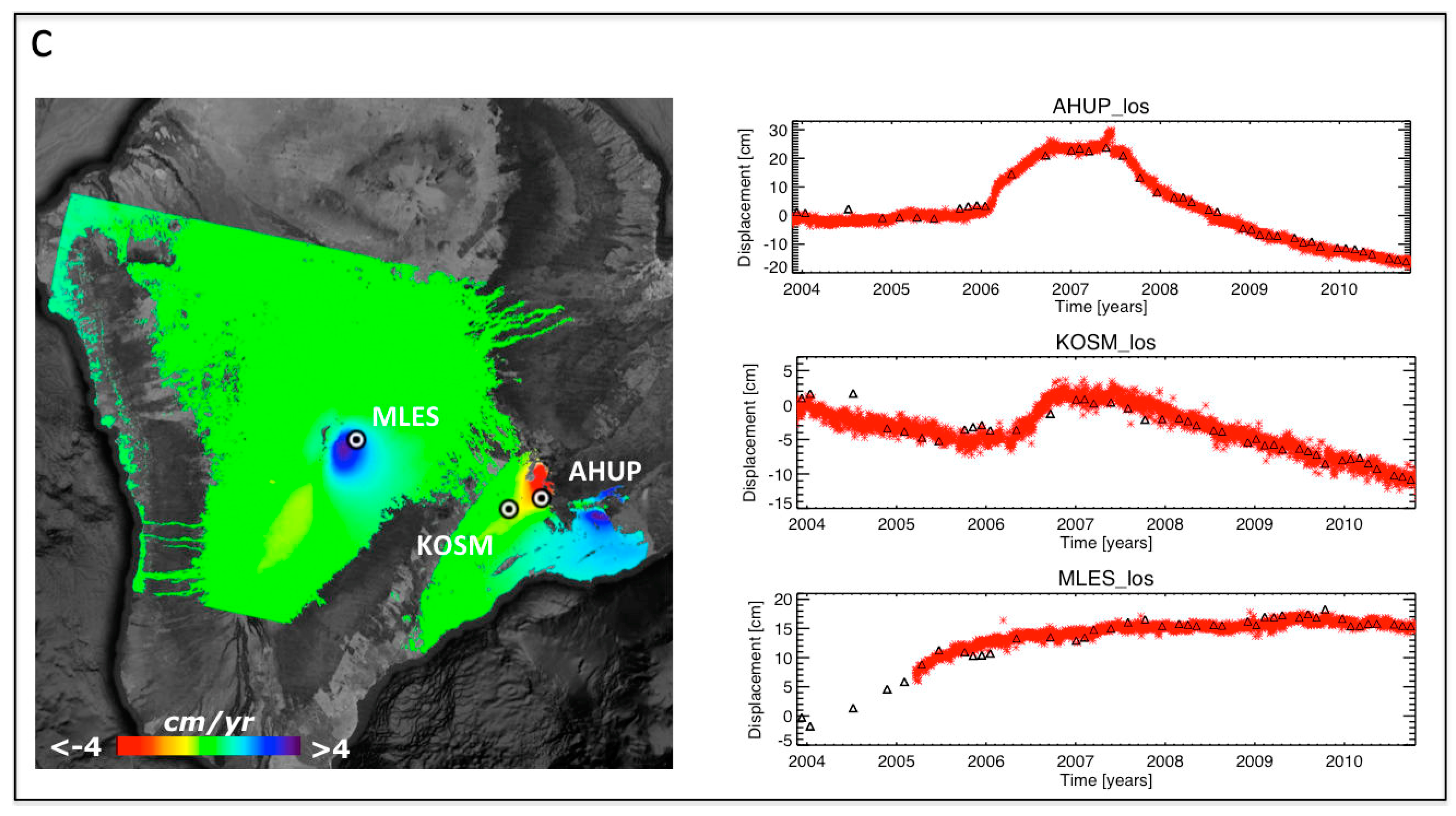
| Campi Flegrei | ACAE | 0.42 | Hawaii | AHUP | 1.41 |
| ARFE | 0.33 | AINP | 0.90 | ||
| BAIA | 0.41 | ALAL | 0.84 | ||
| FRUL | 0.38 | ALEP | 1.13 | ||
| IPPO | 0.40 | ANIP | 0.72 | ||
| LICO | 0.41 | BLBP | 1.15 | ||
| MORU | 0.41 | BYRL | 1.95 | ||
| QUAR | 0.35 | CNPK | 0.51 | ||
| RITE | 0.37 | CRIM | 0.82 | ||
| STRZ | 0.31 | ELEP | 0.95 | ||
| Los Angeles | BGIS | 0.57 | GOPM | 1.49 | |
| BILL | 0.56 | HOLE | 1.69 | ||
| BKMS | 0.92 | KAEP | 2.12 | ||
| CHIL | 0.52 | KAMO | 1.23 | ||
| CIT1 | 1.06 | KFAP | 0.73 | ||
| CJMS | 0.69 | KHKU | 0.88 | ||
| CLAR | 1.24 | KNNE | 0.73 | ||
| CSDH | 0.54 | KOSM | 1.21 | ||
| CVHS | 0.86 | KTPM | 1.64 | ||
| DVPB | 0.70 | MANE | 1.13 | ||
| EWPP | 0.65 | MLCC | 0.90 | ||
| GHRP | 1.01 | MLES | 0.90 | ||
| HOLP | 0.56 | MLPR | 0.55 | ||
| LBC1 | 0.57 | MLRD | 0.88 | ||
| LBC2 | 0.54 | MLSP | 1.25 | ||
| LBCH | 0.56 | MOKP | 2.16 | ||
| LL01 | 0.70 | NPIT | 0.95 | ||
| LORS | 0.34 | OUTL | 0.69 | ||
| MAT2 | 0.53 | PGF1 | 1.65 | ||
| MLFP | 0.66 | PGF2 | 2.13 | ||
| MTA1 | 0.79 | PGF3 | 1.74 | ||
| NOCO | 0.51 | PGF4 | 1.71 | ||
| OXYC | 0.57 | PGF5 | 1.80 | ||
| P470 | 0.75 | PGF6 | 1.74 | ||
| P471 | 0.50 | PHAN | 0.74 | ||
| P476 | 0.84 | PIIK | 0.88 | ||
| P477 | 0.83 | PMAU | 1.15 | ||
| P577 | 1.13 | PUKA | 0.86 | ||
| P581 | 0.51 | RADF | 0.86 | ||
| P586 | 0.56 | SLPC | 0.82 | ||
| P587 | 0.48 | STEP | 1.11 | ||
| P612 | 0.59 | TOUO | 1.30 | ||
| PBPP | 0.48 | UWEV | 0.98 | ||
| PMHS | 0.32 | YEEP | 0.85 | ||
| PPBF | 0.63 | ||||
| RHCL | 0.52 | ||||
| SBCC | 0.62 | ||||
| SGHS | 0.77 | ||||
| SILK | 0.64 | ||||
| SPMS | 0.37 | ||||
| USC1 | 0.28 | ||||
| VDCY | 0.57 | ||||
| VYAS | 0.56 | ||||
| WCHS | 0.92 | ||||
| WHC1 | 0.52 | ||||
| WNRA | 1.06 |
6. Further Developments


7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Massonnet, D.; Feigl, K.L. Radar interferometry and its application to changes in the Earth’s surface. Rev. Geophys. 1998, 36, 441–500. [Google Scholar] [CrossRef]
- Burgmann, R.; Rosen, P.A.; Fielding, E.J. Synthetic aperture radar interferometry to measure Earth’s surface topography and its deformation. Ann. Rev. Earth Planet. Sci. 2000, 28, 169–209. [Google Scholar] [CrossRef]
- Gabriel, A.K.; Goldstein, R.M.; Zebker, H.A. Mapping small elevation changes over large areas: Differential interferometry. J. Geophys. Res. 1989, 94, 9183–9191. [Google Scholar] [CrossRef]
- Franceschetti, G.; Lanari, R. Synthetic Aperture Radar Processing; CRC Press: Boca Raton, FL, USA, 1999. [Google Scholar]
- Massonnet, D.; Rossi, M.; Carmona, C.; Adragna, F.; Peltzer, G.; Feigl, K.; Rabaute, T. The displacement field of the Landers earthquake mapped by radar interferometry. Nature 1993, 364, 138–142. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Werner, C.; Wegmüller, U.; Strozzi, T.; Wiesmann, A. Interferometric point target analysis for deformation mapping. In Proceedings of the Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; pp. 4362–4364.
- Hooper, A.; Zebker, H.; Segall, P.; Kampes, B. A new method for measuring deformation on volcanoes and other natural terrains using InSAR persistent scatterers. Geophys. Res. Lett. 2004, 31, L23611. [Google Scholar] [CrossRef]
- Kampes, B.M. Radar Interferometry: Persistent Scatterer Technique; Springer-Verlag: Dordrecht, The Netherlands, 2006. [Google Scholar]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef]
- Mora, O.; Mallorquí, J.J.; Broquetas, A. Linear and nonlinear terrain deformation maps from a reduced set of interferometric SAR images. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2243–2253. [Google Scholar] [CrossRef]
- Crosetto, M.; Crippa, B.; Biescas, E. Early detection and in-depth analysis of deformation phenomena by radar interferometry. Eng. Geol. 2005, 79, 81–91. [Google Scholar] [CrossRef]
- Sansosti, E.; Casu, F.; Manzo, M.; Lanari, R. Space-borne radar interferometry techniques for the generation of deformation time series: An advanced tool for Earth’s surface displacement analysis. Geophys. Res. Lett. 2010, 37, L20305. [Google Scholar] [CrossRef]
- Lanari, R.; Mora, O.; Manunta, M.; Mallorquí, J.J.; Berardino, P.; Sansosti, E. A small-baseline approach for investigating deformations on full-resolution differential SAR interferograms. Int. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1377–1386. [Google Scholar] [CrossRef]
- Strang, G. Linear Algebra and Its Applications; Harcourt Brace Jovanovich: Orlando, FL, USA, 1988. [Google Scholar]
- Zebker, H.A.; Villasenor, J. Decorrelation in interferometric radar echoes. IEEE Trans. Geosci. Remote Sens. 1992, 30, 950–959. [Google Scholar] [CrossRef]
- Casu, F.; Elefante, S.; Imperatore, P.; Zinno, I.; Manunta, M.; De Luca, C.; Lanari, R. SBAS-DInSAR parallel processing for deformation time-series computation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3285–3296. [Google Scholar] [CrossRef]
- Zinno, I.; Mossucca, L.; Elefante, S.; Luca, C.; Casola, V.; Terzo, O.; Casu, F.; Lanari, R. Cloud computing for earth surface deformation analysis via spaceborne radar imaging: A case study. IEEE Trans. Cloud Comput. 2015, 99. [Google Scholar] [CrossRef]
- Rosen, P.A.; Hensley, S.; Peltzer, G.; Simons, M. Updated repeat orbit interferometry package released. EOS Trans. Am. Geophys. Union 2004, 85, 47. [Google Scholar] [CrossRef]
- Agram, P.S.; Jolivet, R.; Riel, B.; Lin, Y.N.; Simons, M.; Hetland, E.; Doin, M.P.; Lassere, C. New radar interferometric time series analysis toolbox released. Eos Trans. AGU 2013, 94, 69–70. [Google Scholar] [CrossRef]
- Marchetti, P.G.; Rivolta, G.; D’elia, S.; Farres, J.; Gobron, N.; Mason, G. A Model for the Scientific Exploitation of Earth Observation Missions: The ESA Research and Service Support. IEEE Geosci. Newsl. 2012, 162, 10–18. [Google Scholar]
- Virtual Archive 4. Available online: http://eo-virtual-archive4.esa.int/ (accessed on 9 September 2015).
- Lanari, R.; Casu, F.; Manzo, M.; Zeni, G.; Berardino, P.; Manunta, M.; Pepe, A. An overview of the small baseline subset algorithm: A DInSAR technique for surface deformation analysis. Pure Appl. Geophys. 2007, 164, 637–661. [Google Scholar] [CrossRef]
- Casu, F.; Manzo, M.; Lanari, R. A quantitative assessment of the SBAS algorithm performance for surface deformation retrieval from DInSAR data. Remote Sens. Environ. 2006, 102, 195–210. [Google Scholar] [CrossRef]
- Manzo, M.; Fialko, Y.; Casu, F.; Pepe, A.; Lanari, R. A quantitative assessment of DInSAR measurements of interseismic deformation: The southern San Andreas Fault case study. Pure Appl. Geophys. 2012, 169, 1463–1482. [Google Scholar] [CrossRef]
- Bonano, M.; Manunta, M.; Pepe, A.; Paglia, L.; Lanari, R. From previous C-band to new X-band SAR systems: Assessment of the DInSAR mapping improvement for deformation time-series retrieval in urban areas. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1973–1984. [Google Scholar] [CrossRef]
- Lanari, R.; Casu, F.; Manzo, M.; Lundgren, P. Application of the SBAS-DInSAR technique to fault creep: A case study of the Hayward fault, California. Remote Sens. Environ. 2007, 109, 20–28. [Google Scholar] [CrossRef]
- Goldstein, R.M. Atmospheric limitations to repeat-track radar interferometry. Geophys. Res. Lett. 1995, 22, 2517–2520. [Google Scholar] [CrossRef]
- Pepe, A.; Lanari, R. On the extension of the minimum cost flow algorithm for phase unwrapping of multitemporal differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2374–2383. [Google Scholar] [CrossRef]
- Geohazard Exploitation Platform. Available online: https://geohazards-tep.eo.esa.int/#! (accessed on 9 September 2015).
- Geohazard Supersites and Natural Laboratories. Available online: http://supersites.earthobservations.org (accessed on 9 September 2015).
- CEOS. Available online: http://www.ceos.org/index.php?option=com_content&view=category&layout=blog&id=355&Itemid=491 (accessed on 9 September 2015).
- GRID Processing on Demand. Available online: http://wiki.services.eoportal.org/tiki-index.php?page=GPOD%20Wiki (accessed on 9 September 2015).
- IREA. Available online: http://www.irea.cnr.it/en/index.php (accessed on 9 September 2015).
- G-POD. Available online only for registered users: http://gpod.eo.esa.int/services/SBAS (accessed on 30 October 2015).
- European Space Agency. Available online: https://earth.esa.int/web/guest/missions/esa-operational-eo-missions (accessed on 9 September 2015).
- Trasatti, E.; Casu, F.; Giunchi, C.; Pepe, S.; Solaro, G.; Tagliaventi, S.; Berardino, P.; Manzo, M.; Pepe, A.; Ricciardi, G.P.; et al. The 2004–2006 uplift episode at Campi Flegrei caldera (Italy): Constraints from SBAS-DInSAR ENVISAT data and Bayesian source inference. Geophys. Res. Lett. 2008, 35, L073078. [Google Scholar] [CrossRef]
- Lanari, R.; Lundgren, P.; Manzo, M.; Casu, F. Satellite radar interferometry time series analysis of surface deformation for Los Angeles, California. Geophys. Res. Lett. 2004, 31, L23613. [Google Scholar] [CrossRef]
- Poland, M.P.; Sutton, A.J.; Gerlach, T.M. Magma degassing triggered by static decompression at Kīlauea Volcano, Hawaii. Geophys. Res. Lett. 2009, 36, L16306. [Google Scholar] [CrossRef]
- De Martino, P.; Tammaro, U.; Obrizzo, F. GPS time series at Campi Flegrei caldera (2000–2013). Ann. Geophys. 2014, 57, S0213. [Google Scholar]
- SCIGN. Available online: http://www.scign.com (accessed on 30 October 2015).
- UNAVCO. Available online: http://www.unavco.org/data/gps-gnss/data-access-methods/dai2/app/dai2.html#scope=All;boundingBox=16.4296,-162.2705,23.2049,-151.7236 (accessed on 10 November 2015).
- ESA-Sentinel. Available online: https://sentinel.esa.int/web/sentinel/home (accessed on 10 November 2015).
- P-SBAS Manual. Available online: https://wiki.services.eoportal.org/tiki-download_file.php?fileId=883 (accessed on 9 September 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Luca, C.; Cuccu, R.; Elefante, S.; Zinno, I.; Manunta, M.; Casola, V.; Rivolta, G.; Lanari, R.; Casu, F. An On-Demand Web Tool for the Unsupervised Retrieval of Earth’s Surface Deformation from SAR Data: The P-SBAS Service within the ESA G-POD Environment. Remote Sens. 2015, 7, 15630-15650. https://0-doi-org.brum.beds.ac.uk/10.3390/rs71115630
De Luca C, Cuccu R, Elefante S, Zinno I, Manunta M, Casola V, Rivolta G, Lanari R, Casu F. An On-Demand Web Tool for the Unsupervised Retrieval of Earth’s Surface Deformation from SAR Data: The P-SBAS Service within the ESA G-POD Environment. Remote Sensing. 2015; 7(11):15630-15650. https://0-doi-org.brum.beds.ac.uk/10.3390/rs71115630
Chicago/Turabian StyleDe Luca, Claudio, Roberto Cuccu, Stefano Elefante, Ivana Zinno, Michele Manunta, Valentina Casola, Giancarlo Rivolta, Riccardo Lanari, and Francesco Casu. 2015. "An On-Demand Web Tool for the Unsupervised Retrieval of Earth’s Surface Deformation from SAR Data: The P-SBAS Service within the ESA G-POD Environment" Remote Sensing 7, no. 11: 15630-15650. https://0-doi-org.brum.beds.ac.uk/10.3390/rs71115630