
Vertical Height Errors in Digital Terrain Models Derived from Airborne Laser Scanner Data in a Boreal-Alpine Ecotone in Norway

Abstract
:
1. Introduction
1.1. Tree Line Monitoring with Airborne Laser Scanning
1.2. Derivation of Digital Terrain Models Using Airborne Laser Scanning
1.3. Objectives
2. Materials and Methods
2.1. Study Area
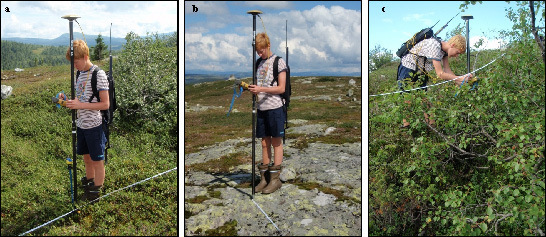
2.2. Field Measurements
2.2.1. Establishing and Recording of Ground Control Point Positions

2.2.2. Recording of Ground Control Point Properties

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Terrain Form | Terrain Surface/Vegetation Height | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Rock/Bare | Lichen/Heather | Green | |||||||
| <10 cm | 10–20 cm | >20 cm | <10 cm | 10–20 cm | >20 cm | <10 cm | 10–20 cm | >20 cm | |
| Flat | 16 | 0 | 0 | 30 | 0 | 0 | 202 | 43 | 51 |
| Concave | 0 | 0 | 0 | 3 | 0 | 0 | 33 | 14 | 11 |
| Convex | 1 | 0 | 0 | 3 | 0 | 0 | 15 | 2 | 2 |

2.3. Laser Data Acquisition
| Parameter | Acquisition | |||
|---|---|---|---|---|
| ACQ1 | ACQ2 | ACQ3 | ACQ4 | |
| System | ALTM 3100C | ALTM Gemini | ALTM Gemini | ALTM Gemini |
| Pulse width | 14.7 ns | >14.7 ns a | b | b |
| Pulse energy | 69 μJ | <69 μJ a | b | b |
| Peak power | 4.7 kW | <4.7 kW a | b | b |
| Wavelength | 1064 nm | 1064 nm | 1064 nm | 1064 nm |
| Repetition frequency | 100 kHz | 125 kHz | 166 kHz | 166 kHz |
| Scan frequency | 70 Hz | 70 Hz | 70 Hz | 70 Hz |
| Pulse mode | Single | Single | Single | Dual |
| Date | 24 July 2006 | 11 June 2007 | 11 June 2007 | 11 June 2007 |
| Mean flying altitude | 700 m a.g.l. | 700 m a.g.l. | 700 m a.g.l. | 1130 m a.g.l. |
| Flight speed | 80 m∙s−1 | 75 m∙s−1 | 75 m∙s−1 | 75 m∙s−1 |
| Max. scan angle | 14° | 14° | 14° | 10° |
| Max processing angle | 14° | 14° | 14° | 10° |
| Mean footprint diameter | 18 cm | 17 cm | 17 cm | 28 cm |
| Mean point density | 7.7 m−2 | 9.1 m−2 | 11.0 m−2 | 8.4 m−2 |
| Proportion of deleted echoes c | 0% | <0.01% | 0.2% | 9.3% |

2.4. Laser Data Processing
2.4.1. Pre-Processing of Laser Data
2.4.2. Calculating Terrain Models
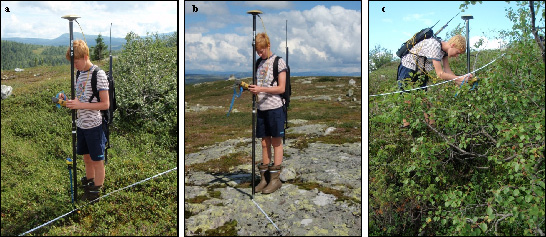
2.4.3. Identifying PRF Shifts in Dual Pulse Mode

2.4.4. Terrain Slope Calculation
2.4.5. Overall Calibration of the Laser Data
2.5. Analysis
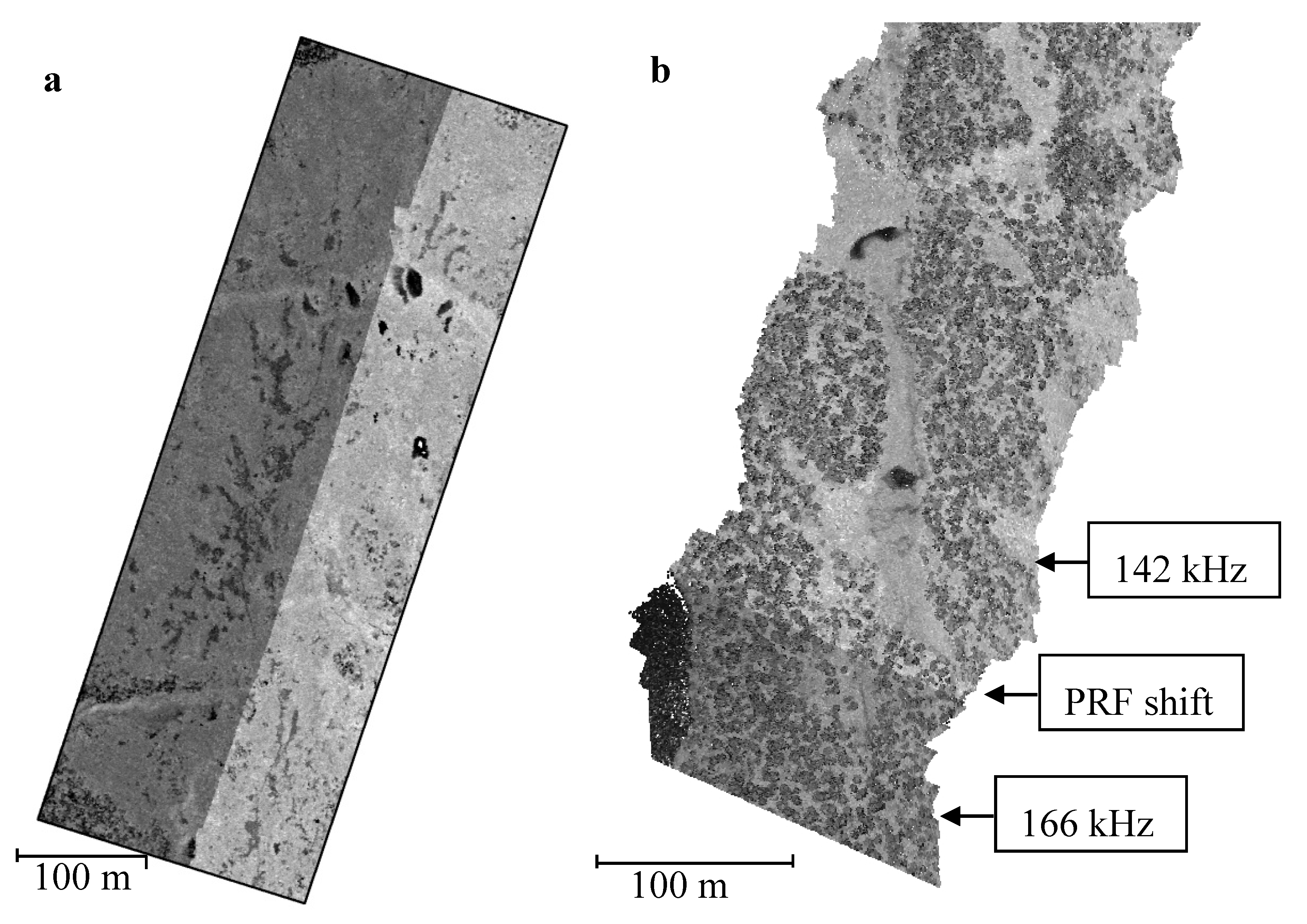
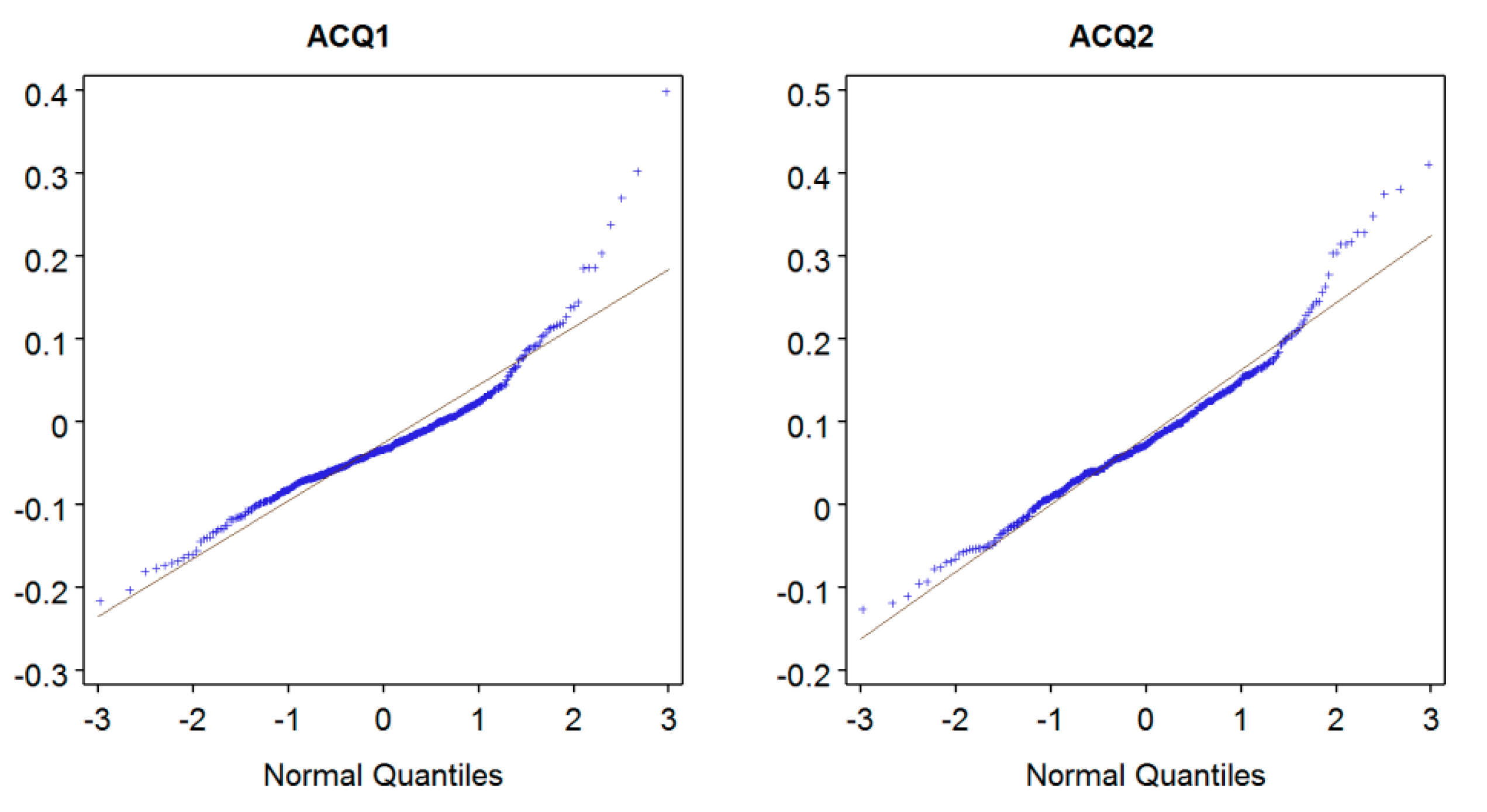
2.5.1. Estimation of Error Statistics
2.5.2. Regression Analysis of Errors
2.5.3. Tests of Contrast in the Regression Analysis
2.5.4. Goodness of Fit of the Regression Model
3. Results
3.1. Overall Results


3.2. Detailed Results for Individual Effects
| Effect | n | (m) | s (m) | P50ε (m) | NMAD (m) | P95|ε| (m) |
|---|---|---|---|---|---|---|
| Acquisition | ||||||
| 700 m 100 kHz (ACQ1) | 426 | −0.03 | 0.07 | −0.03 | 0.07 | 0.14 |
| 700 m 125 kHz (ACQ2) | 426 | 0.08 | 0.08 | 0.07 | 0.11 | 0.22 |
| 700 m 166 kHz (ACQ3) a | 426 | 0.04 | 0.13 | 0.05 | 0.12 | 0.28 |
| 1130 m 166 kHz (ACQ4) | 426 | −0.04 | 0.13 | −0.04 | 0.12 | 0.25 |
| Slope | ||||||
| <10% | 359 | 0.00 | 0.09 | 0.00 | 0.08 | 0.18 |
| 10%–20% | 560 | 0.01 | 0.11 | 0.01 | 0.10 | 0.21 |
| 20%–30% | 387 | 0.02 | 0.12 | 0.02 | 0.10 | 0.23 |
| 30%–40% | 205 | 0.03 | 0.13 | 0.04 | 0.13 | 0.25 |
| 40%–50% | 98 | 0.04 | 0.15 | 0.04 | 0.13 | 0.35 |
| >50% | 95 | 0.05 | 0.16 | 0.04 | 0.16 | 0.32 |
| Overall | 1704 | 0.01 | 0.12 | 0.01 | 0.10 | 0.24 |
| Acquisition | Effect | n | (m) | s (m) | P50ε (m) | NMAD (m) | P95|ε| (m) |
|---|---|---|---|---|---|---|---|
| Terrain form (TFORM) | |||||||
| 700 m 100 kHz (ACQ1) | Flat | 342 | −0.03 | 0.06 | −0.04 | 0.07 | 0.13 |
| 700 m 100 kHz (ACQ1) | Concave | 61 | 0.02 | 0.08 | 0.01 | 0.05 | 0.14 |
| 700 m 100 kHz (ACQ1) | Convex | 23 | −0.07 | 0.06 | −0.07 | 0.11 | 0.17 |
| 700 m 125 kHz (ACQ2) | Flat | 342 | 0.08 | 0.07 | 0.07 | 0.10 | 0.20 |
| 700 m 125 kHz (ACQ2) | Concave | 61 | 0.13 | 0.09 | 0.13 | 0.20 | 0.31 |
| 700 m 125 kHz (ACQ2) | Convex | 23 | 0.01 | 0.10 | −0.01 | 0.08 | 0.13 |
| 700 m 166 kHz (ACQ3) a | Flat | 342 | 0.03 | 0.13 | 0.04 | 0.12 | 0.27 |
| 700 m 166 kHz (ACQ3) a | Concave | 61 | 0.11 | 0.13 | 0.12 | 0.19 | 0.30 |
| 700 m 166 kHz (ACQ3) a | Convex | 23 | −0.02 | 0.17 | −0.02 | 0.11 | 0.32 |
| 1130 m 166 kHz (ACQ4) | Flat | 342 | −0.04 | 0.12 | −0.05 | 0.12 | 0.23 |
| 1130 m 166 kHz (ACQ4) | Concave | 61 | 0.04 | 0.12 | 0.03 | 0.12 | 0.26 |
| 1130 m 166 kHz (ACQ4) | Convex | 23 | −0.11 | 0.19 | −0.15 | 0.24 | 0.37 |
| Terrain surface (TSURF) | |||||||
| 700 m 100 kHz (ACQ1) | Rock/bare | 17 | −0.09 | 0.04 | −0.08 | 0.12 | 0.20 |
| 700 m 100 kHz (ACQ1) | Lichen/heather | 36 | −0.04 | 0.04 | −0.04 | 0.06 | 0.11 |
| 700 m 100 kHz (ACQ1) | Green | 373 | −0.02 | 0.07 | −0.03 | 0.06 | 0.14 |
| 700 m 125 kHz (ACQ2) | Rock/bare | 17 | 0.01 | 0.06 | 0.00 | 0.08 | 0.12 |
| 700 m 125 kHz (ACQ2) | Lichen/heather | 36 | 0.06 | 0.05 | 0.06 | 0.09 | 0.15 |
| 700 m 125 kHz (ACQ2) | Green | 373 | 0.09 | 0.08 | 0.08 | 0.12 | 0.23 |
| 700 m 166 kHz (ACQ3) a | Rock/bare | 17 | −0.06 | 0.12 | −0.02 | 0.07 | 0.32 |
| 700 m 166 kHz (ACQ3) a | Lichen/heather | 36 | −0.01 | 0.14 | 0.02 | 0.15 | 0.29 |
| 700 m 166 kHz (ACQ3) a | Green | 373 | 0.05 | 0.13 | 0.05 | 0.13 | 0.28 |
| 1130 m 166 kHz (ACQ4) | Rock/bare | 17 | −0.11 | 0.09 | −0.11 | 0.18 | 0.22 |
| 1130 m 166 kHz (ACQ4) | Lichen/heather | 36 | −0.06 | 0.08 | −0.05 | 0.09 | 0.19 |
| 1130 m 166 kHz (ACQ4) | Green | 373 | −0.03 | 0.13 | −0.04 | 0.13 | 0.25 |
| Vegetation height (VEGH) | |||||||
| 700 m 100 kHz (ACQ1) | <10 cm | 303 | −0.04 | 0.05 | −0.04 | 0.06 | 0.12 |
| 700 m 100 kHz (ACQ1) | 10–20 cm | 59 | 0.00 | 0.06 | −0.01 | 0.06 | 0.13 |
| 700 m 100 kHz (ACQ1) | >20 cm | 64 | 0.03 | 0.11 | 0.01 | 0.11 | 0.24 |
| 700 m 125 kHz (ACQ2) | <10 cm | 303 | 0.07 | 0.07 | 0.07 | 0.10 | 0.17 |
| 700 m 125 kHz (ACQ2) | 10–20 cm | 59 | 0.09 | 0.09 | 0.09 | 0.14 | 0.26 |
| 700 m 125 kHz (ACQ2) | >20 cm | 64 | 0.13 | 0.11 | 0.12 | 0.18 | 0.31 |
| 700 m 166 kHz (ACQ3) a | <10 cm | 303 | 0.02 | 0.13 | 0.04 | 0.11 | 0.28 |
| 700 m 166 kHz (ACQ3) a | 10–20 cm | 59 | 0.07 | 0.12 | 0.06 | 0.14 | 0.26 |
| 700 m 166 kHz (ACQ3) a | >20 cm | 64 | 0.12 | 0.16 | 0.11 | 0.19 | 0.37 |
| 1130 m 166 kHz (ACQ4) | <10 cm | 303 | −0.06 | 0.11 | −0.06 | 0.12 | 0.23 |
| 1130 m 166 kHz (ACQ4) | 10–20 cm | 59 | −0.03 | 0.11 | −0.03 | 0.10 | 0.27 |
| 1130 m 166 kHz (ACQ4) | >20 cm | 64 | 0.06 | 0.14 | 0.07 | 0.14 | 0.26 |
| Coefficient | Estimate | p-Value |
|---|---|---|
| Intercept (β0) | −0.098 | <0.001 |
| ACQ2 | 0.107 | <0.001 |
| ACQ3, 142 kHz a | 0.049 | <0.001 |
| ACQ3, 166 kHz a | 0.068 | <0.001 |
| ACQ4 | −0.010 | 0.066 |
| TFORMconcave | 0.058 | 0.009 |
| TFORMconvex | −0.050 | 0.014 |
| TSURFheather | 0.045 | 0.020 |
| TSURFgreen | 0.055 | 0.017 |
| VEGH10–20 | 0.024 | 0.014 |
| VEGH>20 | 0.081 | <0.001 |
| SLOPE | 0.003E-3 | 0.981 |
| Tests of contrasts: | ||
| ACQ2 versus ACQ3 | <0.001 | |
| ACQ2 versus ACQ4 | <0.001 | |
| ACQ3 versus ACQ4 | <0.001 | |
| ACQ3: 142 kHz versus 166 kHz | 0.103 | |
| TFORMconcave versus TFORMconvex | <0.001 | |
| TSURFheather versus TSURFgreen | 0.400 | |
| VEGH10–20 versus VEGH>20 | <0.001 | |
| Pseudo-R2 | 0.30 |
4. Discussion
4.1. General Considerations
4.2. Consequences for Vegetation Monitoring
4.3. A Comment on Slope Effects
5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Zheng, D.; Freeman, M.; Bergh, J.; Røsberg, I.; Nilsen, P. Production of Picea abies in South-East Norway in response to climate change: A case study using process-based model simulation with field validation. Scand. J. For. Res. 2002, 17, 35–46. [Google Scholar]
- Kullman, L. Late Holeocene reproductional patterns of Pinus sylvestris and Picea abies at the forest limit in central Sweden. Can. J. Bot. 1986, 64, 1682–1690. [Google Scholar]
- Kullman, L. Tree line population monitoring of Pinus sylvestris in the Swedish Scandes, 1973–2005: Implications for tree line theory and climate change ecology. J. Ecol. 2007, 95, 41–52. [Google Scholar]
- Danby, R.K.; Hik, D.S. Variability, contigency and rapid change in recent subarctic alpine tree line dynamics. J. Ecol. 2007, 95, 352–363. [Google Scholar]
- Soja, A.J.; Tchebakova, N.M.; French, N.N.F.; Flannigan, M.D.; Shugart, H.H.; Stocks, B.J.; Sukhinin, A.I.; Parfenova, E.I.; Chapin, F.S., III; Stackhouse, P.W., Jr. Climate-induced boreal forest change: Predictions versus current observations. Glob. Planet. Chang. 2007, 56, 274–296. [Google Scholar]
- Callaghan, T.V.; Werkman, B.R.; Crawford, R.M.M. The tundra-taiga interface and its dynamics: Concepts and applications. Ambio 2002, 12, 6–14. [Google Scholar]
- Hyyppä, J.; Hyyppä, H.; Leckie, D.; Gougeon, F.; Yu, X.; Maltamo, M. Review of methods of small-footprint airborne laser scanning for extracting forest inventory data in boreal forests. Int. J. Remote Sens. 2008, 29, 1339–1366. [Google Scholar]
- McRoberts, R.E.; Andersen, H.-E.; Næsset, E. Using airborne laser scanning data to support forest sample surveys. In Forestry Applications of Airborne Laser Scanning; Maltamo, M., Næsset, E., Vauhkonen, J., Eds.; Springer: Dordrecht, The Netherlands, 2014; pp. 269–292. [Google Scholar]
- Maltamo, M.; Packalen, P. Species-specific management inventory in Finland. In Forestry Applications of Airborne Laser Scanning; Maltamo, M., Næsset, E., Vauhkonen, J., Eds.; Springer: Dordrecht, The Netherlands, 2014; pp. 241–252. [Google Scholar]
- Næsset, E. Area-based inventory in Norway—From innovation to an operational reality. In Forestry Applications of Airborne Laser Scanning; Maltamo, M., Næsset, E., Vauhkonen, J., Eds.; Springer: Dordrecht, The Netherlands, 2014; pp. 215–240. [Google Scholar]
- Vauhkonen, J.; Rombouts, J.; Maltamo, M. Inventory of forest plantations. In Forestry Applications of Airborne Laser Scanning; Maltamo, M., Næsset, E., Vauhkonen, J., Eds.; Springer: Dordrecht, The Netherlands, 2014; pp. 253–268. [Google Scholar]
- Hill, R.A.; Hinsley, S.A.; Broughton, R.K. Assessing habitats and organism-habitat relationships by airborne laser scanning. In Forestry Applications of Airborne Laser Scanning; Maltamo, M., Næsset, E., Vauhkonen, J., Eds.; Springer: Dordrecht, The Netherlands, 2014; pp. 335–356. [Google Scholar]
- Müller, J.; Vierling, K. Assessing biodiversity by airborne laser scanning. In Forestry Applications of Airborne Laser Scanning; Maltamo, M., Næsset, E., Vauhkonen, J., Eds.; Springer: Dordrecht, The Netherlands, 2014; pp. 357–374. [Google Scholar]
- Næsset, E.; Nelson, R. Using airborne laser scanning to monitor tree migration in the boreal-alpine transition zone. Remote Sens. Environ. 2007, 110, 357–369. [Google Scholar]
- Nyström, M.; Holmgren, J.; Olsson, H. Prediction of tree biomass in the forest-tundra ecotone using airborne laser scanning. Remote Sens. Environ. 2012, 123, 271–279. [Google Scholar]
- Næsset, E. Influence of terrain model smoothing and flight and sensor configurations on detection of small pioneer trees in the boreal–alpine transition zone utilizing height metrics derived from airborne scanning lasers. Remote Sens. Environ. 2009, 113, 2210–2223. [Google Scholar]
- Thieme, N.; Bollandsås, O.M.; Gobakken, T.; Næsset, E. Detection of small single trees in the forest-tundra ecotone using height values from airborne laser scanning. Can. J. Remote Sens. 2011, 37, 264–274. [Google Scholar]
- Stumberg, N.; Ørka, H.O.; Bollandsås, O.M.; Gobakken, T.; Næsset, E. Classifying tree and nontree echoes from airborne laser scanning in the forest-tundra ecotone. Can. J. Remote Sens. 2012, 38, 655–666. [Google Scholar]
- Stumberg, N.; Hauglin, M.; Bollandsås, O.M.; Gobakken, T.; Næsset, E. Improving classification of airborne laser scanning echoes in the forest-tundra ecotone using geostatistical and statistical measures. Remote Sens. 2014, 6, 4582–4599. [Google Scholar]
- Stumberg, N.; Bollandsås, O.M.; Gobakken, T.; Næsset, E. Automatic detection of small single trees in the forest-tundra ecotone using airborne laser scanning. Remote Sens. 2014, 6, 10152–10170. [Google Scholar]
- Rees, W.G. Characterisation of arctic treelines by lidar and multispectral imagery. Polar Rec. 2007, 43, 345–352. [Google Scholar]
- Kraus, K.; Pfeifer, N. Determination of terrain models in wooded areas with airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar]
- Hodgson, M.E.; Jensen, J.; Raber, G.; Tullis, J.; Davis, B.A.; Thompson, G.; Schuckman, K. An evaluation of Lidar-derived elevation and terrain slope in leaf-off conditions. Photogramm. Eng. Remote Sens. 2005, 71, 817–823. [Google Scholar]
- Raber, G.T.; Jensen, J.R.; Hodgson, M.E.; Tullis, J.A.; Davis, B.A.; Berglund, J. Impact of Lidar nominal post-spacing on DEM accuracy and flood zone delineation. Photogramm. Eng. Remote Sens. 2007, 73, 793–804. [Google Scholar]
- Meng, X.; Currit, N.; Zhao, K. Ground filtering algorithms for airborne LiDAR data: A review of critical issues. Remote Sens. 2010, 2, 833–860. [Google Scholar]
- Pfeifer, N.; Gorte, B.; Elberink, S.O. Influences of vegetation on laser altimetry—Analysis and correction approaches. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 36, 283–287. [Google Scholar]
- Reutebuch, S.E.; McGaughey, R.J.; Andersen, H.E.; Carson, W.W. Accuracy of a high-resolution lidar terrain model under a conifer forest canopy. Can. J. Remote Sens. 2003, 29, 527–535. [Google Scholar]
- Hopkinson, C.; Chasmer, L.E.; Sass, G.; Creed, I.F.; Sitar, M.; Kalbfleisch, W.; Treitz, P. Vegetation class dependent errors in lidar ground elevation and canopy height estimates in a boreal wetland environment. Can. J. Remote Sens. 2005, 31, 191–206. [Google Scholar]
- Mongus, D.; Žalik, B. Parameter-free ground filtering of LiDAR data for automatic DTM generation. ISPRS J. Photogramm. Remote Sens. 2012, 67, 1–12. [Google Scholar]
- Susaki, J. Adaptive slope filtering of airborne LiDAR data in urban areas for digital terrain model (DTM) generation. Remote Sens. 2012, 4, 1804–819. [Google Scholar]
- Tinkham, W.T.; Huang, H.; Smith, A.M.S.; Shrestha, R.; Falkowski, M.J.; Hudak, A.T.; Link, T.E.; Glenn, N.F.; Marks, D.G. A comparison of two open source LiDAR surface classification algorithms. Remote Sens. 2011, 3, 638–649. [Google Scholar]
- Meng, X.; Currit, N.; Zhao, K. Ground filtering algorithms for airborne LiDAR data: A review of critical issues. Remote Sens. 2010, 2, 833–860. [Google Scholar]
- Axelsson, P. Dem generation from laser scanner data using adaptive tin models. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2000, 33(B4), 111–118. [Google Scholar]
- Hodgson, M.E.; Bresnahan, P. Accuracy of airborne lidar-derived elevation: Empirical assessment and error budget. Photogramm. Eng. Remote Sens. 2004, 70, 331–339. [Google Scholar]
- Hyyppä, H.; Yu, X.; Hyyppä, J.; Kaartinen, H.; Honkavaara, E.; Rönnholm, P. Factors affecting the quality of DTM generation in forested areas. In Proceedings of ISPRS Workshop on Laser Scanning 2005, Enschede, The Netherlands, 12–14 September 2005; Volume XXXVI, pp. 85–90.
- Bollandsås, O.M.; Risbøl, O.; Ene, L.T.; Nesbakken, A.; Gobakken, T.; Næsset, E. Using airborne small-footprint laser scanner data for detection of cultural remains in forests: An experimental study of the effects of pulse density and DTM smoothing. J. Archaeol. Sci. 2012, 39, 2733–2743. [Google Scholar]
- Sithole, G.; Vosselmann, G. Experimental comparison of filter algorithms for bare-earth extraction from airborne laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2004, 59, 85–101. [Google Scholar]
- Kartverket. Grunnlagsnett. Versjon 1.1, Desember 2009. Norwegian Mapping Authority, 2009; p. 29. Available online: http://www.kartverket.no/Documents/Standard/Bransjestandarder%20utover%20SOSI/grunnlag.pdf (accessed on 3 March 2014).
- Terrasolid. TerraMatch User’s Guide; Terrasolid Ltd.: Jyvaskyla, Finland, 2014; p. 89. Available online: http://www.terrasolid.com/download/tmatch.pdf (accessed on 5 March 2015).
- Blom. Rapport BNO07757, Veggli; Project Report to Client; Blom Geomatics As: Oslo, Norway, 2007; Unpublished; p. 10. [Google Scholar]
- Terrasolid. TerraScan User’s Guide. Terrasolid Ltd.: Jyvaskyla, Finland, 2014; p. 485. Available online: https://www.terrasolid.com/download/tscan.pdf (accessed on 5 March 2014).
- Zandbergen, P.A. Positional accuracy of spatial data: Non-normal distributions and a critique of the national standard for spatial data accuracy. Trans. GIS 2008, 12, 103–130. [Google Scholar]
- Höhle, J.; Höhle, M. Accuracy assessment of digital elevation models by means of robust statistical methods. ISPRS J. Photogramm. Remote Sens. 2009, 64, 398–406. [Google Scholar]
- SAS. SAS OnlineDoc®, Version 9.2; SAS Institute Inc.: Cary, NC, USA, 2007.
- Kvålseth, T.O. Cautionary note about R2. Am. Stat. 1985, 39, 279–285. [Google Scholar]
- Bollandsås, O.M.; Næsset, E. Weibull models for single tree increment of Norway spruce, Scots pine, birch, and other broadleaves in Norway. Scand. J. For. Res. 2009, 24, 55–67. [Google Scholar]
- St-Onge, B.; Vepakomma, U. Assessing forest gap dynamics and growth using multi-temporal laser-scanner data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 36(Part 8), 173–178. [Google Scholar]
- Boisvenue, C.; Temesgen, H.; Marshall, P. Selecting a small tree height growth model for mixed-species stands in the southern interior of British Columbia, Canada. For. Ecol. Manag. 2004, 202, 301–312. [Google Scholar]
- Mast, J.N.; Veblen, T.T.; Hodgson, M.E. Tree invasion within a pine/grassland ecotone: An approach with historic aerial photography and GIS modeling. For. Ecol. Manag. 1997, 93, 181–194. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Næsset, E. Vertical Height Errors in Digital Terrain Models Derived from Airborne Laser Scanner Data in a Boreal-Alpine Ecotone in Norway. Remote Sens. 2015, 7, 4702-4725. https://0-doi-org.brum.beds.ac.uk/10.3390/rs70404702
Næsset E. Vertical Height Errors in Digital Terrain Models Derived from Airborne Laser Scanner Data in a Boreal-Alpine Ecotone in Norway. Remote Sensing. 2015; 7(4):4702-4725. https://0-doi-org.brum.beds.ac.uk/10.3390/rs70404702
Chicago/Turabian StyleNæsset, Erik. 2015. "Vertical Height Errors in Digital Terrain Models Derived from Airborne Laser Scanner Data in a Boreal-Alpine Ecotone in Norway" Remote Sensing 7, no. 4: 4702-4725. https://0-doi-org.brum.beds.ac.uk/10.3390/rs70404702