
A Multi-Sensor Approach for Volcanic Ash Cloud Retrieval and Eruption Characterization: The 23 November 2013 Etna Lava Fountain


 , , , ,
, , , ,  , ,
, ,
Abstract
:
1. Introduction
2. The Etna 23 November 2013 Eruption

3. Satellite and Ground-Based Systems and Volcanic Ash Retrieval

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time (UTC) | SEVIRI | MODIS | IASI | DPX4 | Camera VIS |
|---|---|---|---|---|---|
| 09:40–10:30 | X | X | X | ||
| 10:45–11:00 | X | X | |||
| 11:15–12:30 | X | ||||
| 12:45 | X | X | |||
| 13:00–14:30 | X | ||||
| 21:00 | X |
| Retrieved Ash Parameters | Symbol | Unit of Measure | SEVIRI (TIR) | MODIS (TIR) | IASI (TIR) | DPX4 (MW) | Camera (VIS) |
|---|---|---|---|---|---|---|---|
| Mass Loading | Ma | t/km2 | X | X | X | X | |
| Aerosol Optical Depth @ 550 nm | AOD | X | X | X | |||
| Effective Radius | Re | μm | X | X | X | X | |
| Concentration | Ca | t/km3 | X | ||||
| Cloud Altitude | hct | km | X | X | X | X | X |
| Cloud Thickness * | Δhct | km | X | X |
3.1. Geostationary and Polar Orbiting Satellite Sensors
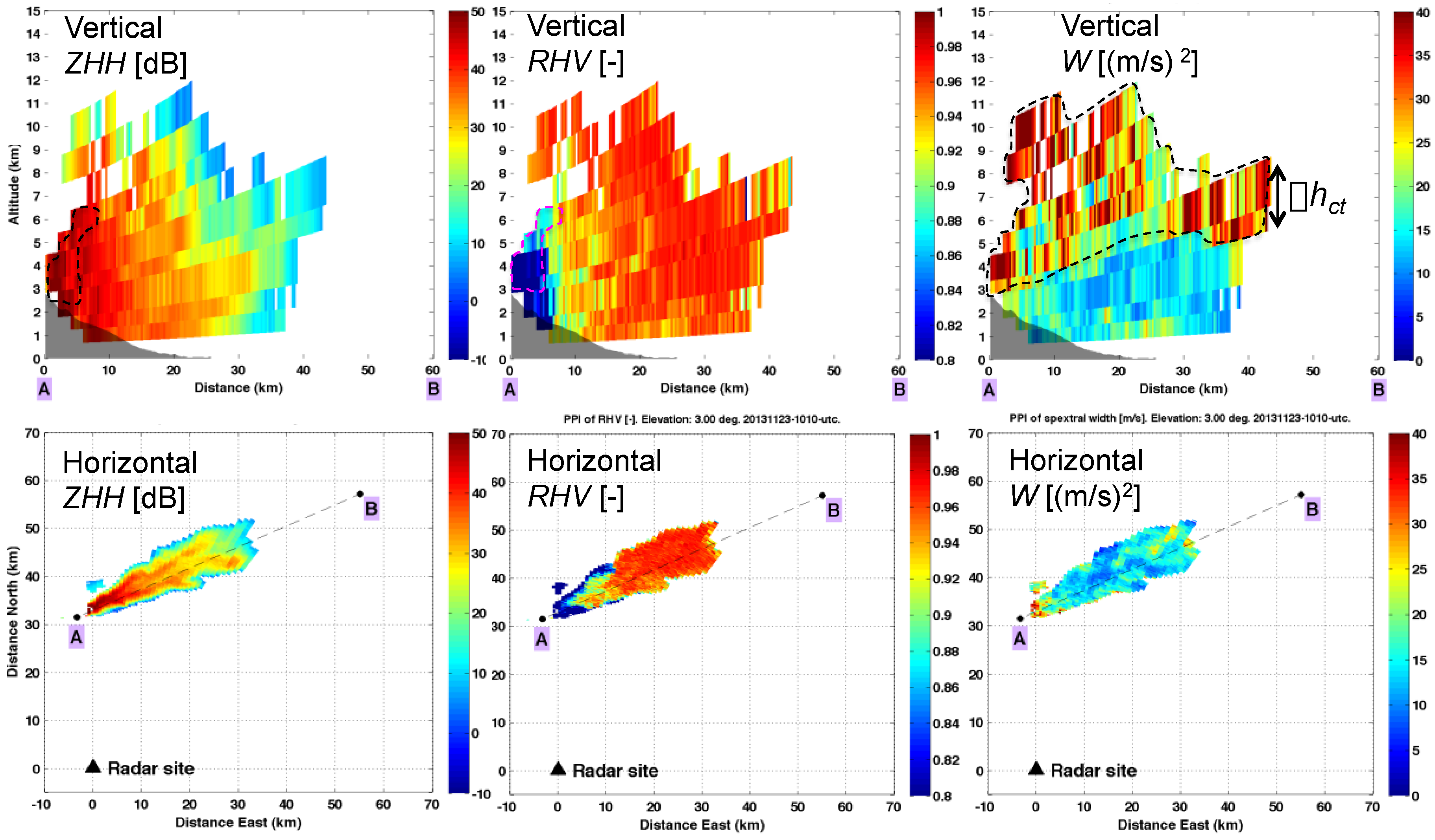
3.2. X-Band Radar
4. Satellite and Ground-Based Volcanic Ash Retrieval Results
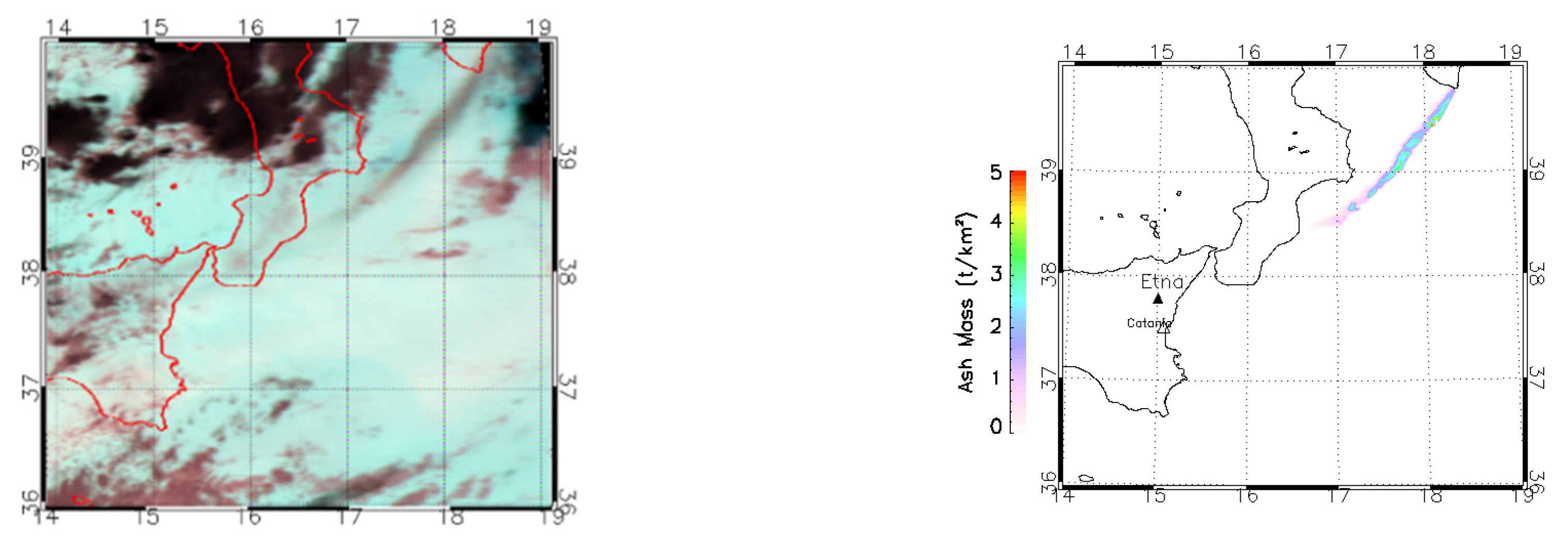
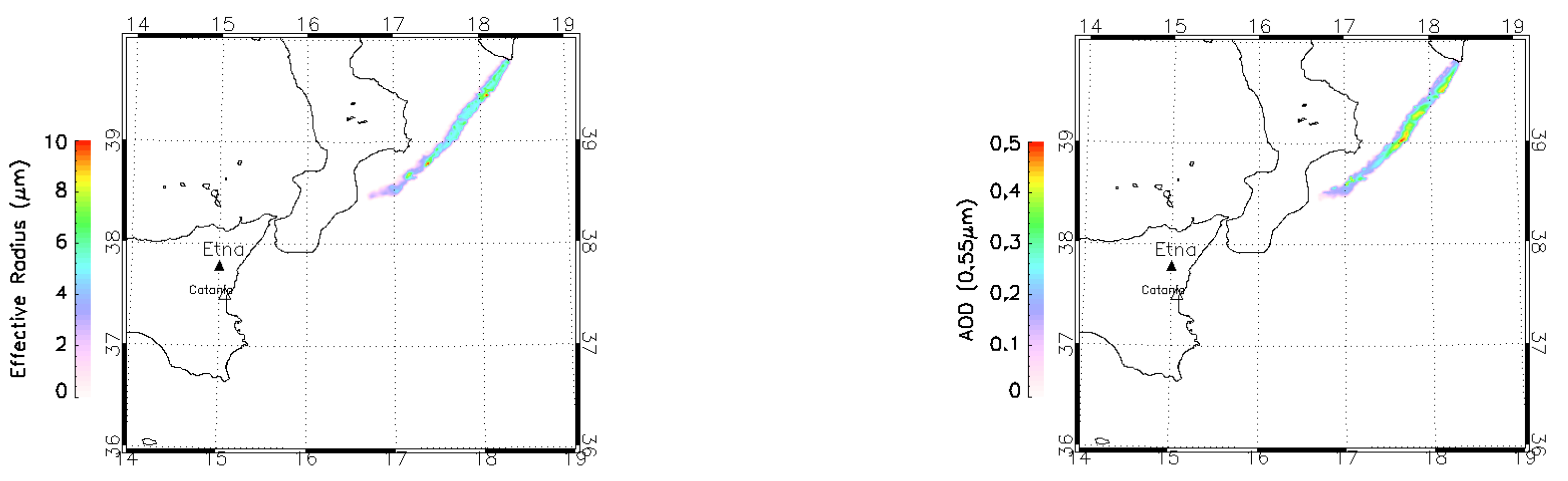
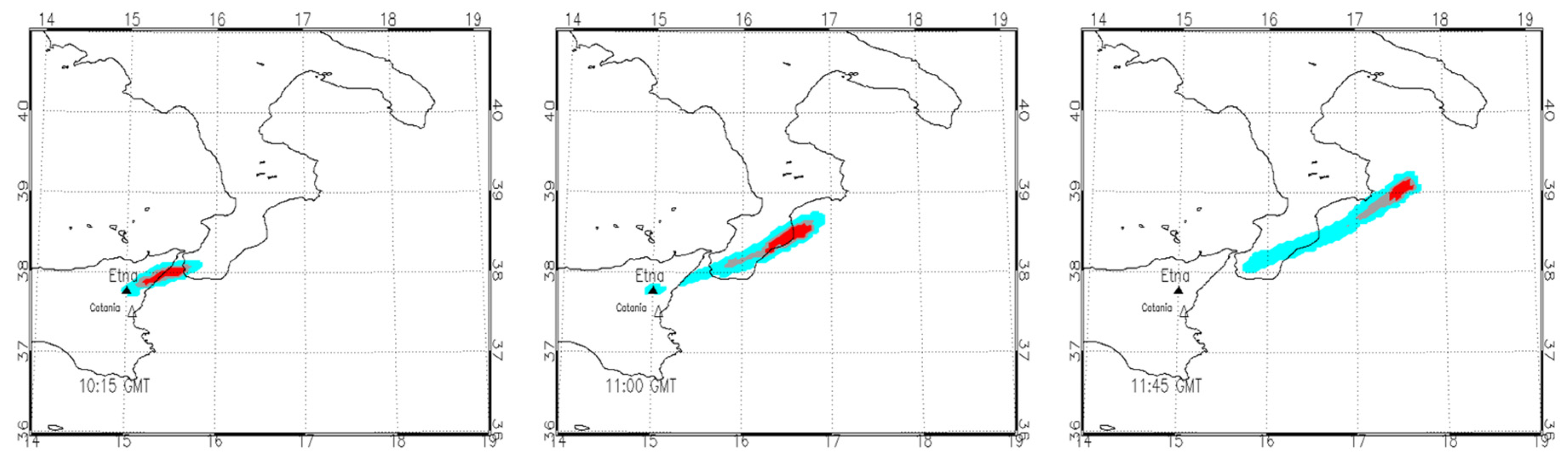
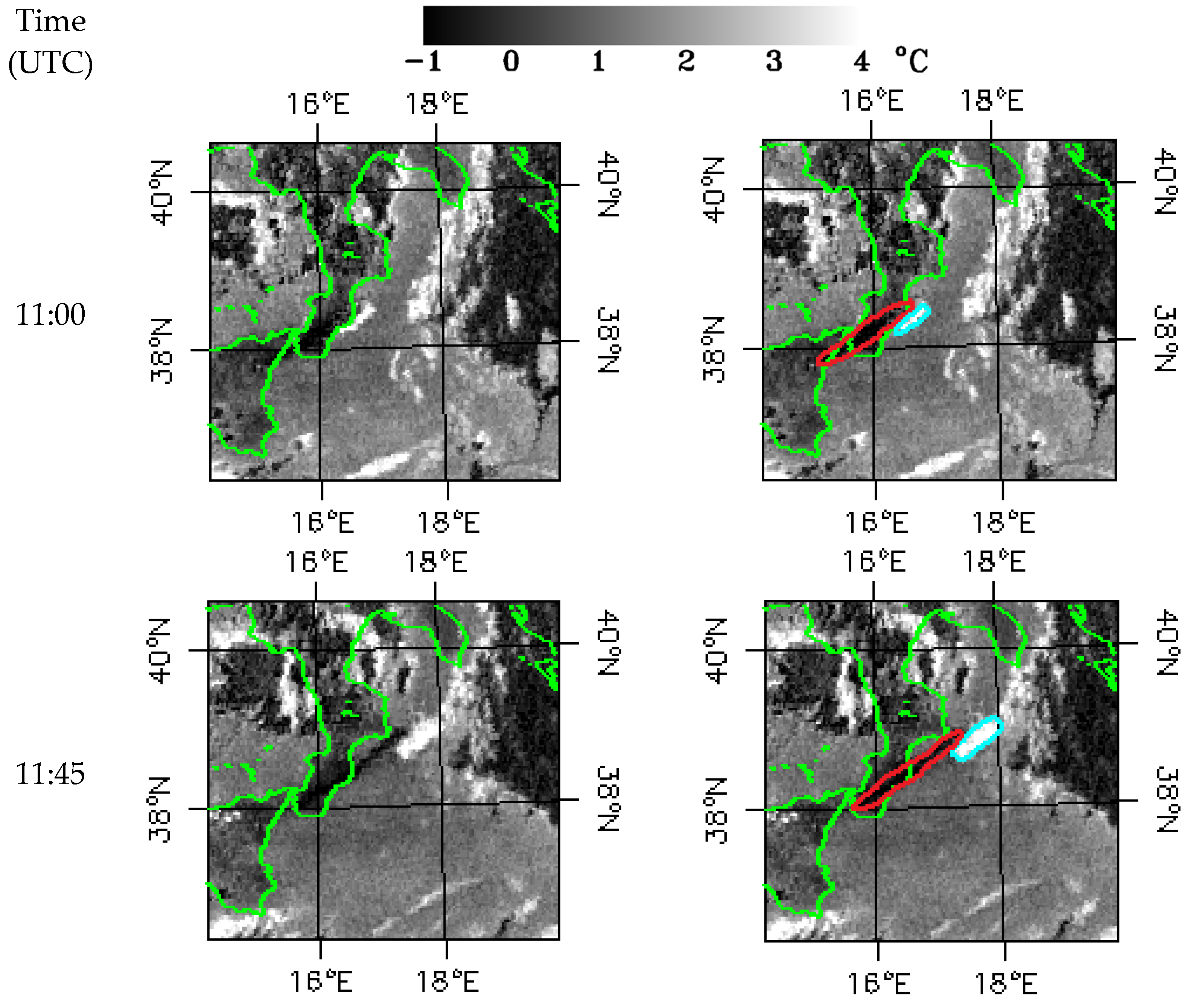
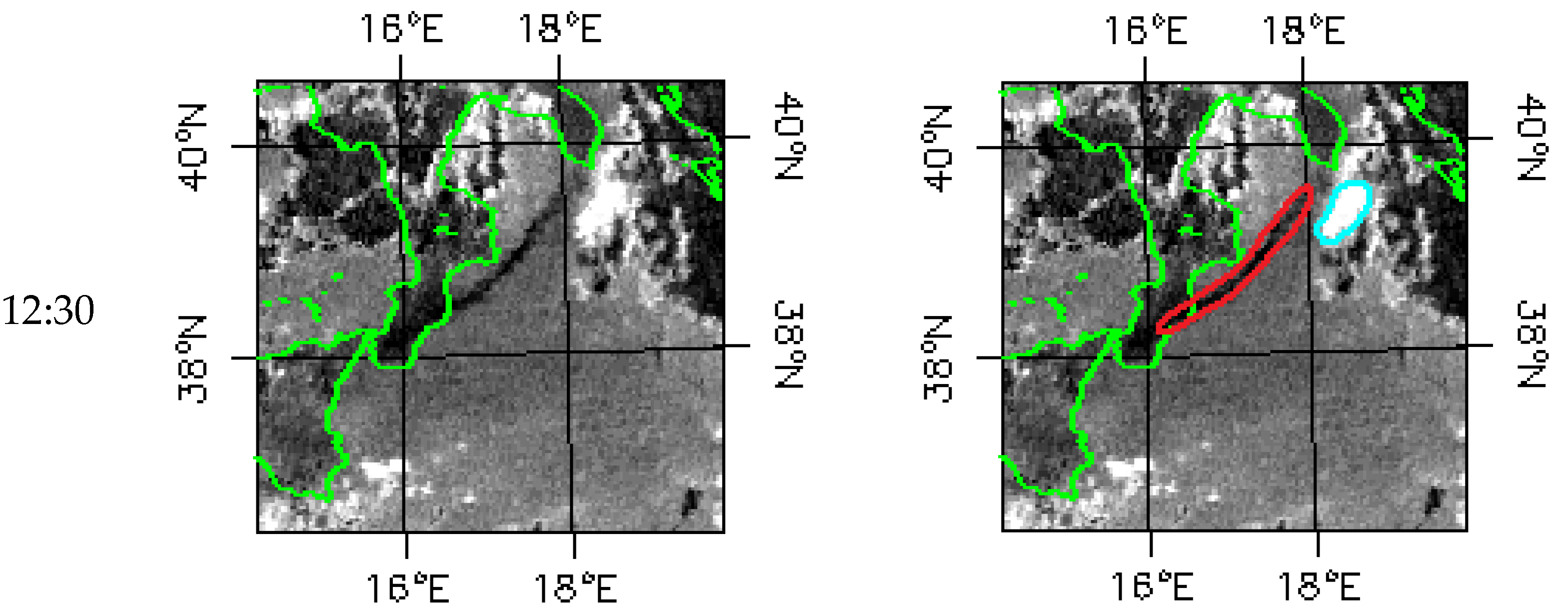
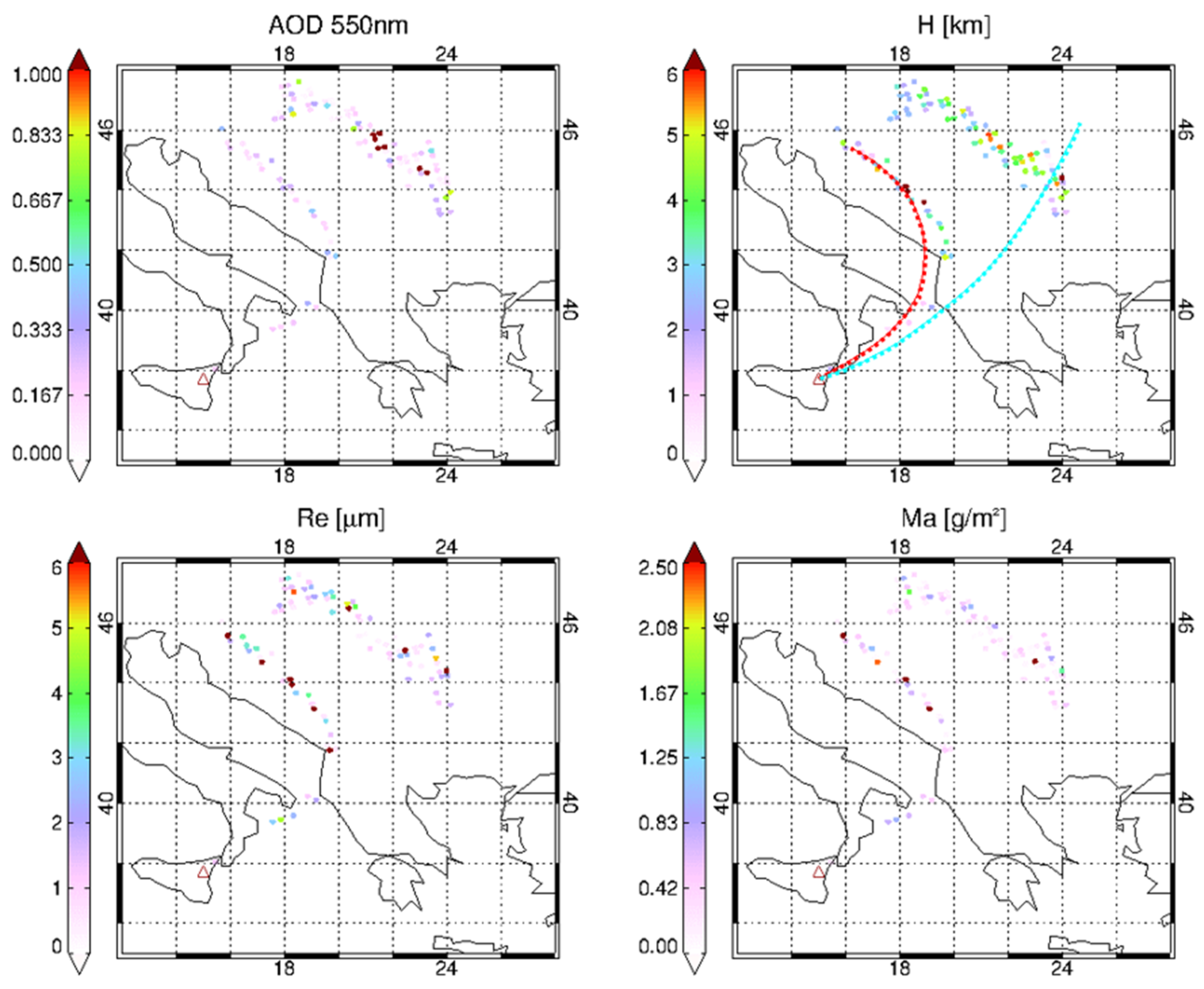
4.1. Satellite Ash Retrievals





4.2. DPX4 Ash Retrievals


5. The Multi-Sensor Approach
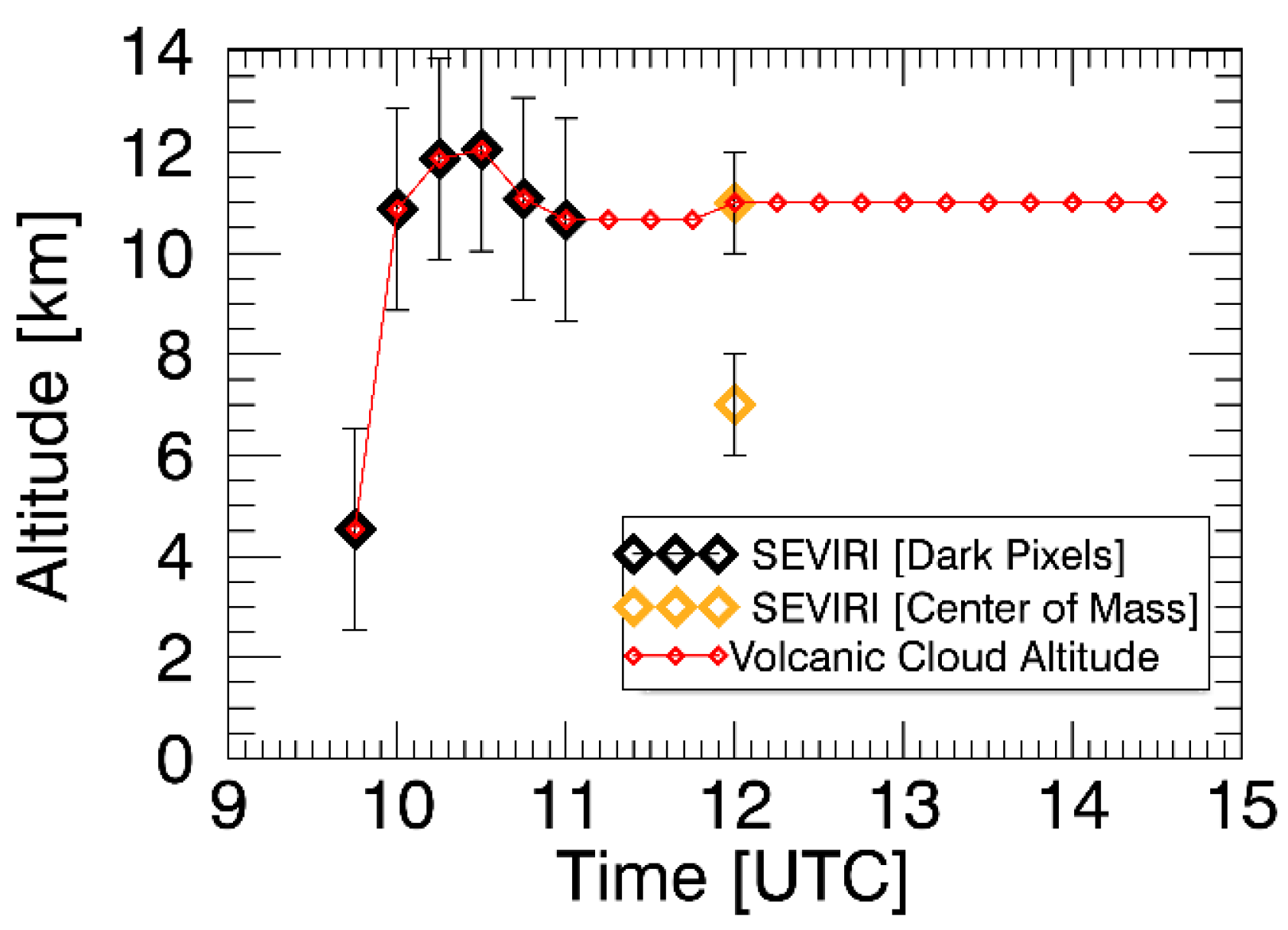
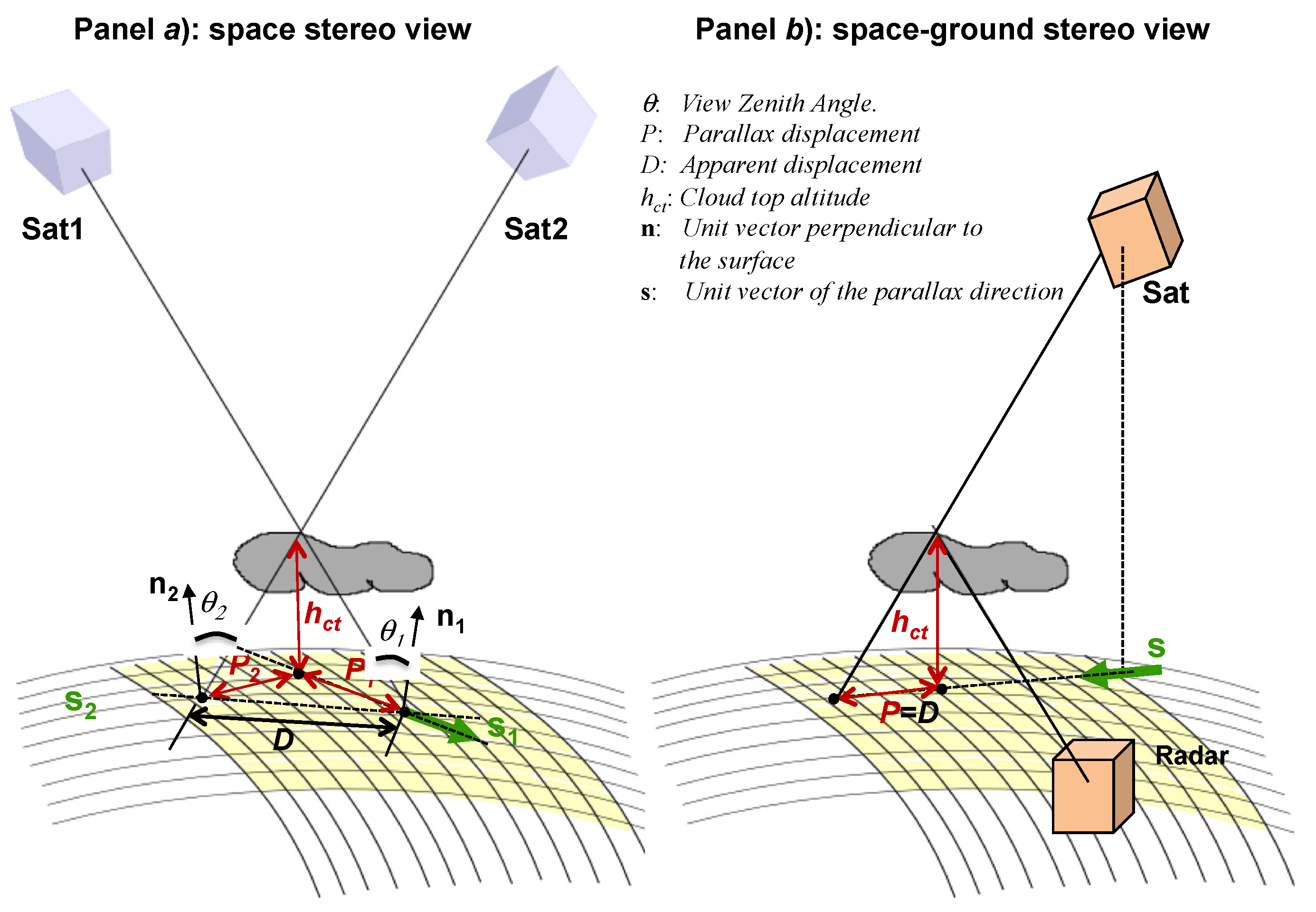
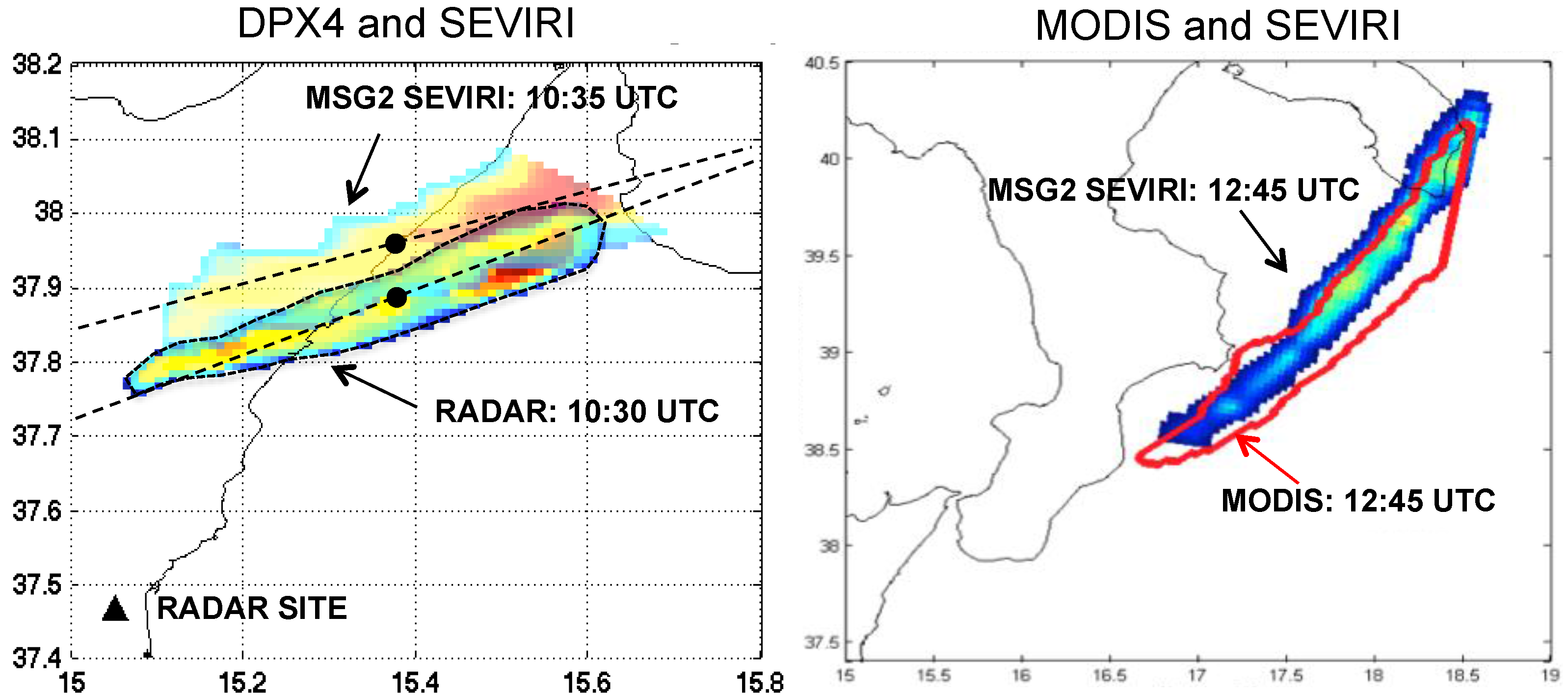
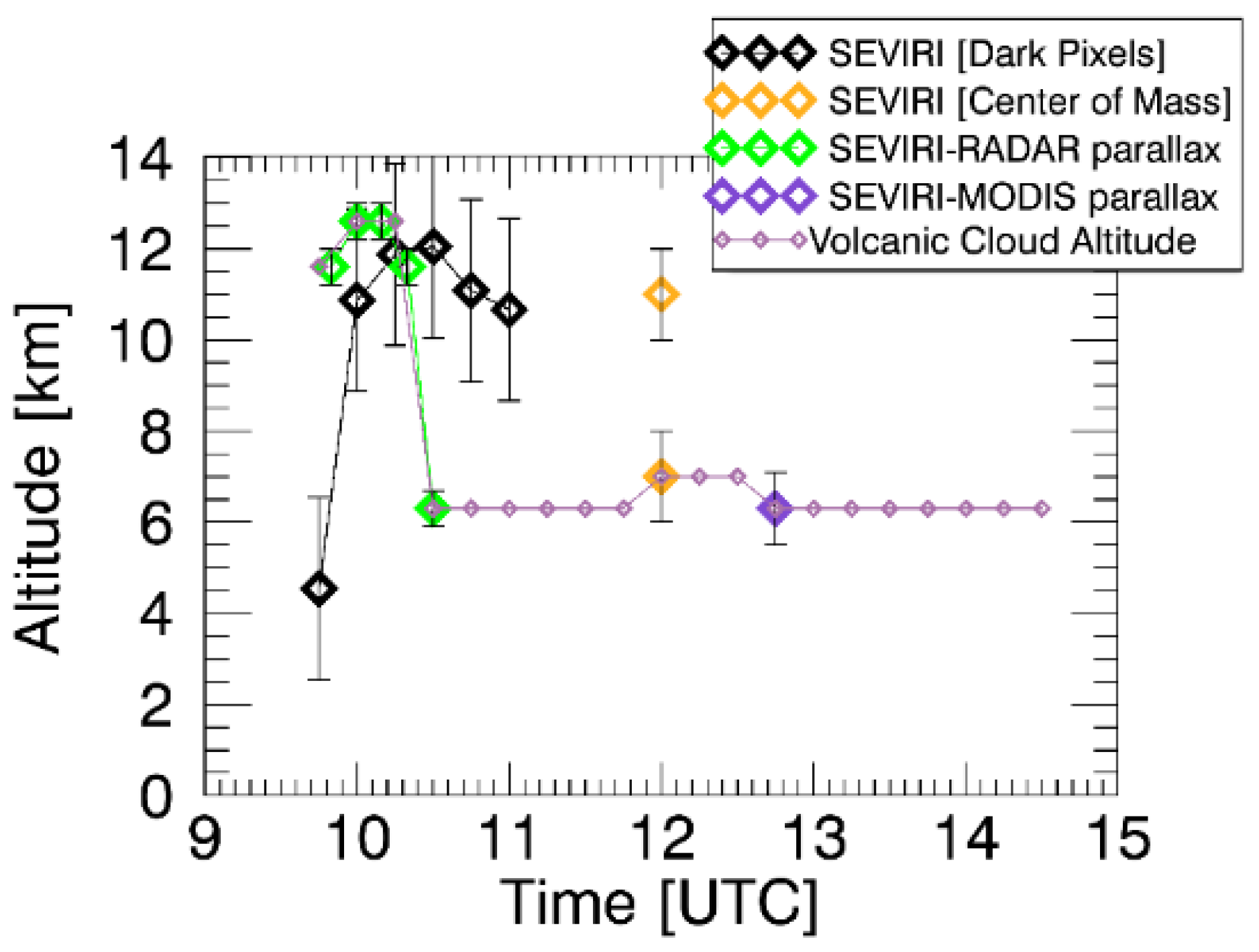
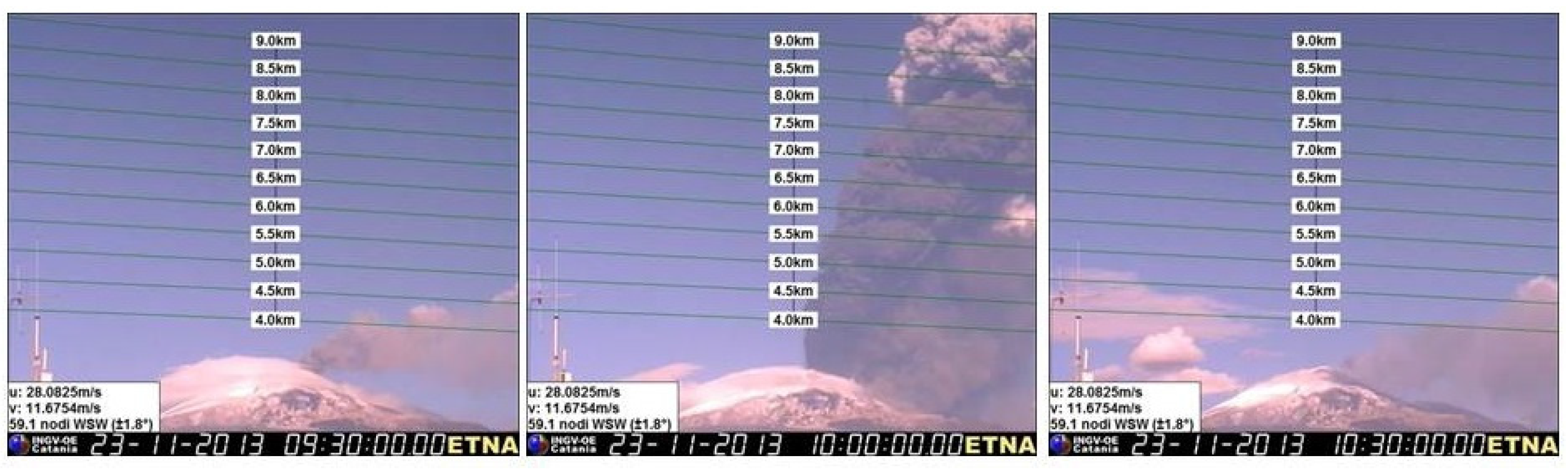
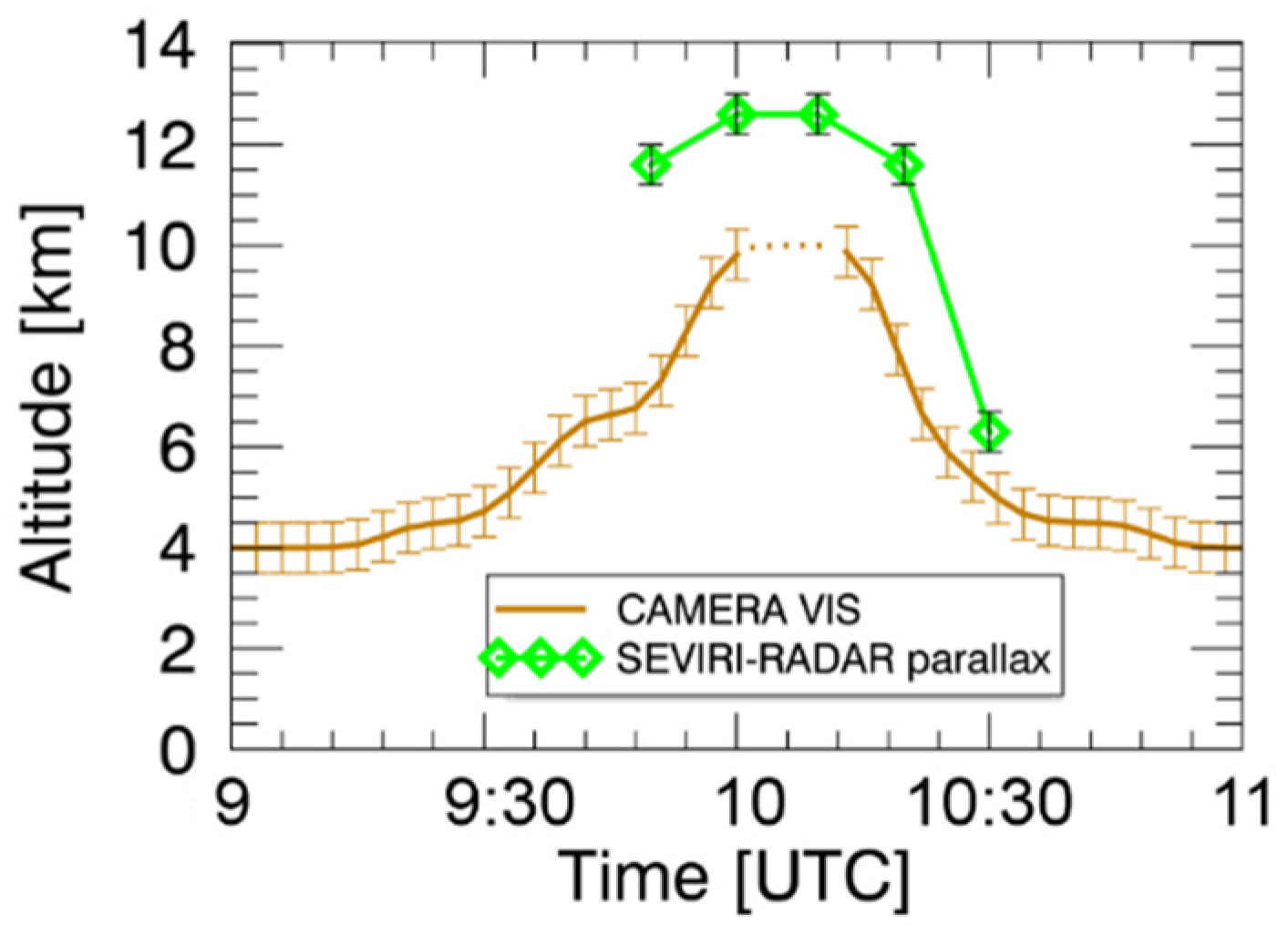
5.1. Volcanic Cloud Altitude

| SEVIRI Nominal Time (UTC) (Effective Time in Etna Area (UTC) | DPX4 Time Intervals (UTC) | hct ± Δhct (km) |
|---|---|---|
| 09:50 (09:52:30) | 09:50–09:55 | 11.6 ± 0.4 |
| 10:00 (10:02:30) | 10:00–10:05 | 12.6 ± 0.4 |
| 10:10 (10:12:30) | 10:10–10:15 | 12.6 ± 0.4 |
| 10:20 (10:22:30) | 10:20–10:25 | 11.6 ± 0.4 |
| 10:30 (10:32:30) | 10:30–10:35 | 6.3 ± 0.4 |
| SEVIRI | MODIS | |
| 12:45 (12:47:30) | 12:45 (12:47:00) | 6.3 ± 0.8 |


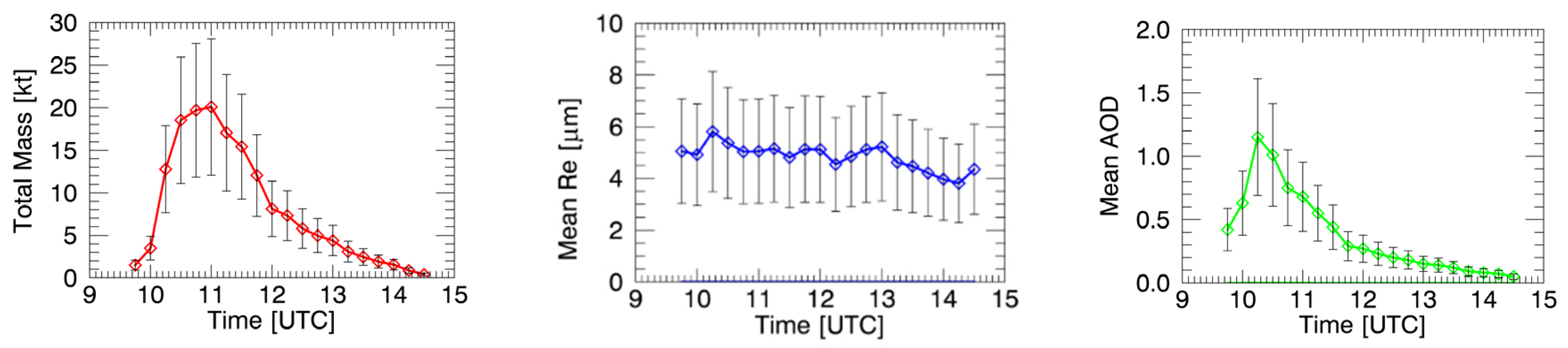
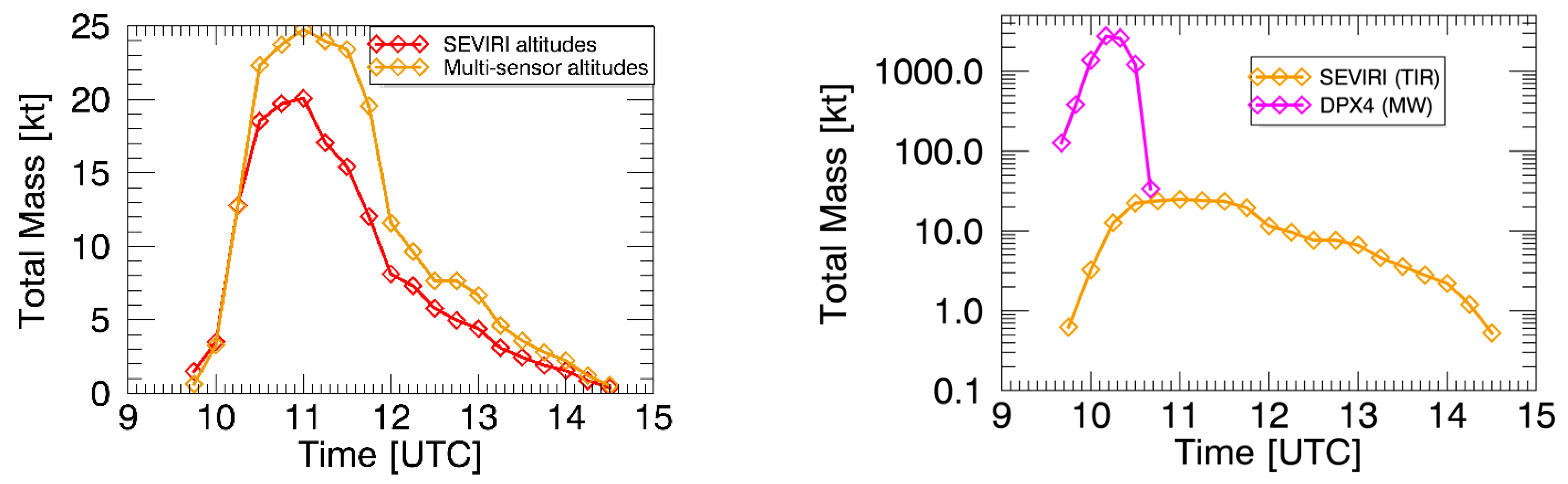
5.2. Total Ash Mass Emitted and Ash Concentration in the Atmosphere


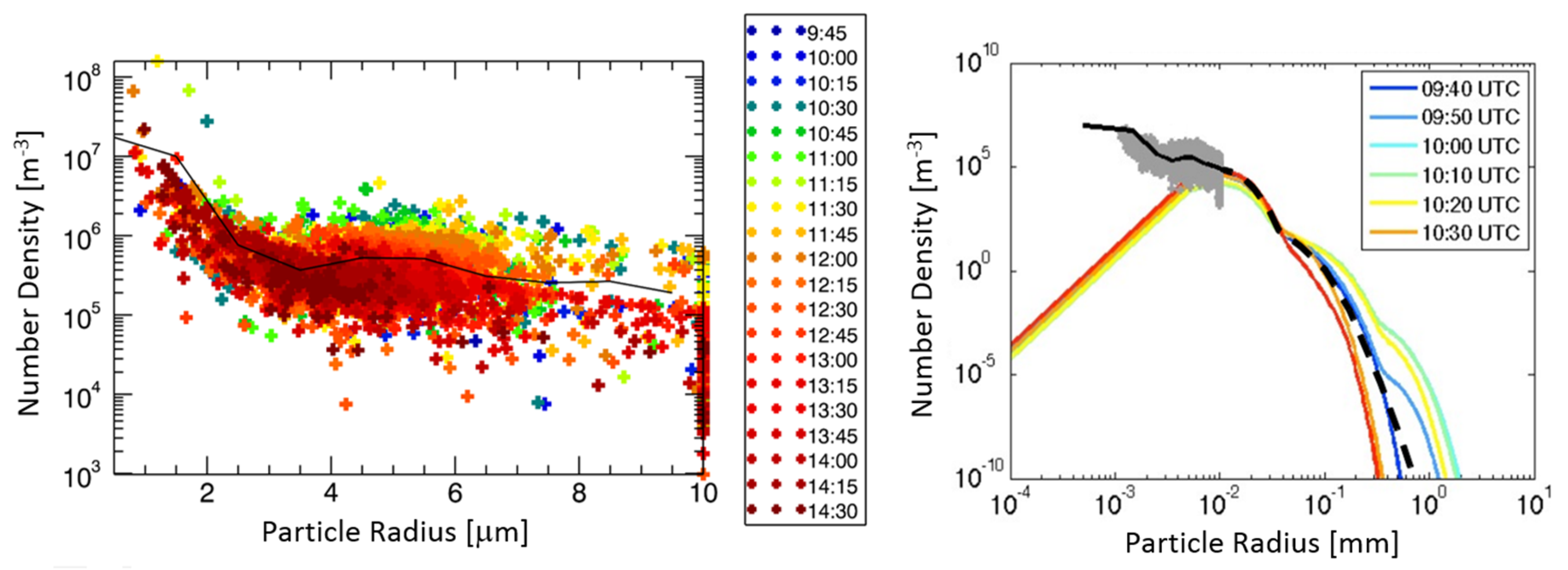
5.3. Particle Number Density

6. Products Validation
6.1. Volcanic Cloud Altitude






6.2. Volcanic Cloud Thickness

6.3. Volcanic Ash Total Mass and Coarse/Fine Ratio
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Stevenson, J.A.; Millington, S.C.; Beckett, F.M.; Swindles, G.T.; Thordarson, T. Big grains go far: Understanding the discrepancy between tephrochronology and satellite infrared measurements of volcanic ash. Atmos. Meas. Tech. 2015, 8, 2069–2091. [Google Scholar] [CrossRef]
- Thordasson, H.; Self, S. Atmospheric and environmental effects of the 1783–1784 Laki eruption: A review and reassessment. J. Geophys. Res. 2003. [Google Scholar] [CrossRef]
- Grainger, R.G.; Highwood, E.J. Changes in stratospheric composition chemistry, radiation and climate caused by volcanic eruptions. In Volcanic Degassing; Geological Society: London, UK, 2003; Volume 213, pp. 329–347. [Google Scholar]
- Horwell, C.J.; Baxter, P.J. The respiratory health hazards of volcanic ash: A review for volcanic risk mitigation. Bull. Volcanol. 2006, 69, 1–24. [Google Scholar] [CrossRef]
- Casadevall, T.J. The 1989/1990 eruption of Redoubt Volcano Alaska: Impacts on aircraft operations. J. Volcanol. Geotherm. Res. 1994, 62, 301–316. [Google Scholar] [CrossRef]
- Zehner, C. Monitoring volcanic ash from space. In Proceedings of the ESA-EUMETSAT Workshop on the 14 April to 23 May 2010 Eruption at the Eyjafjoll Volcano, South Iceland, Frascati, Italy, 26–27 May 2010.
- European Aviation Safety Agency (EASA). Safety Information Bulletin No.: 2010-17R7. Available online: http://www.ad.easa.europa.eu/ad/2010-17R7 (accessed on 16 November 2015).
- Yu, T.; Rose, W.I.; Prata, A.J. Atmospheric correction for satellite-based volcanic ash mapping and retrievals using “split window” IR data from GOES and AVHRR. J. Geophys. Res. 2002. [Google Scholar] [CrossRef]
- Corradini, S.; Merucci, L.; Prata, A.J.; Piscini, A. Volcanic ash and SO2 in the 2008 Kasatochi eruption: Retrievals comparison from different IR satellite sensors. J. Geophys. Res. 2010, 115, D00L21. [Google Scholar]
- Newman, S.M.; Clarisse, L.; Hurtmans, D.; Marenco, F.; Johnson, B.; Turnbull, K.; Havemann, S.; Baran, A.J.; O’Sullivan, D.; Haywood, J. A case study of observations of volcanic ash from the Eyjafjallajökull eruption: 2. Airborne and satellite radiative measurements. J. Geophys. Res. 2012. [Google Scholar] [CrossRef]
- Pavolonis, M.J.; Heidinger, A.K.; Sieglaff, J. Automated retrievals of volcanic ash and dust cloud properties from upwelling infrared measurements. J. Geophys. Res. 2013, 118, 1436–1458. [Google Scholar] [CrossRef]
- Dubuisson, P.; Herbin, H.; Minvielle, F.; Compiègne, M.; Thieuleux, F.; Parol, F.; Pelon, J. Remote sensing of volcanic ash plumes from thermal infrared: A case study analysis from SEVIRI, MODIS and IASI instruments. Atmos. Meas. Tech. 2014, 7, 359–371. [Google Scholar] [CrossRef] [Green Version]
- Scollo, S.; Prestifilippo, M.; Pecora, E.; Corradini, S.; Merucci, L.; Spata, G.; Coltelli, M. Eruption column height estimation: The 2011–2013 Etna lava fountains. Ann. Geophys. 2014, 57. [Google Scholar] [CrossRef] [Green Version]
- Bignami, C.; Corradini, S.; Merucci, L.; de Michele, M.; Raucoules, D.; Stramondo, S.; Piedra, J. Multi-sensor satellite monitoring of the 2011 Puyheue-Cordon Caulle Eruption. JSTARS 2014, 7, 2786–2796. [Google Scholar]
- APhoRISM FP7 Project. Available online: http://www.aphorism-project.eu (accessed on 1 January 2015).
- Behncke, B.; Branca, S.; Corsaro, R.A.; de Beni, E.; Miraglia, L.; Proietti, P. The 2011–2012 summit activity of Mount Etna: Birth, growth and products of the new SE crater. J. Volcanol. Geotherm. Res. 2014, 270, 10–21. [Google Scholar] [CrossRef]
- Scollo, S.; Boselli, A.; Coltelli, M.; Leto, G.; Pisani, G.; Prestifilippo, M.; Spinelli, N.; Wang, X. Volcanic ash concentration during the 12 August 2011 Etna eruption. Geoph. Res. Lett. 2015. [Google Scholar] [CrossRef]
- Alparone, S.; Andronico, D.; Lodato, L.; Sgroi, T. Relationship between tremor and volcanic activity during the Southeast Crater eruption on Mount Etna in early 2000. J. Geophys. Res. 2003. [Google Scholar] [CrossRef]
- Andronico, D.; Scollo, S.; Cristaldi, A. Unexpected hazards from tephra fallouts at Mt Etna: The 23 November 2013 lava fountain. J. Volcanol. Geotherm. Res. 2015, 304, 118–125. [Google Scholar] [CrossRef]
- Pugnaghi, S.; Guerrieri, L.; Corradini, S.; Merucci, L.; Arvani, B. A new simplified procedure for the simultaneous SO2 and ash retrieval in a tropospheric volcanic cloud. Atmos. Meas. Tech. 2013, 6, 1315–1327. [Google Scholar] [CrossRef] [Green Version]
- Guerrieri, L.; Merucci, L.; Corradini, S.; Pugnaghi, S. Evolution of the 2011 Mt. Etna ash and SO2 lava fountain episodes using SEVIRI data and VPR retrieval approach. J. Volcanol. Geotherm. Res. 2015, 291, 63–71. [Google Scholar] [CrossRef]
- Corradini, S.; Pugnaghi, S.; Piscini, A.; Guerrieri, L.; Merucci, L.; Picchiani, M.; Chini, M. Volcanic Ash and SO2 retrievals using synthetic MODIS TIR data: Comparison between inversion procedures and sensitivity analysis. Ann. Geoph. 2014, 57, 2. [Google Scholar] [CrossRef] [Green Version]
- Volz, F.E. Infrared optical constants of ammonium sulfate, Sahara dust, volcanic pumice, and flyash. Appl. Opt. 1973, 12, 564–568. [Google Scholar] [CrossRef] [PubMed]
- Wen, S.; Rose, W.I. Retrieval of sizes and total masses of particles in volcanic clouds using AVHRR bands 4 and 5. J. Geophys. Res. 1994, 99, 5421–5431. [Google Scholar] [CrossRef]
- Pugnaghi, S.; Guerrieri, L.; Corradini, S.; Merucci, L. Improvements of the volcanic plume removal (VPR) approach for the real-time ash and SO2 satellite retrievals. In Proceedings of the EGU General Assembly 2015, Vienna, Austria, 12–17 April 2015.
- Bringi, V.N.; Chandrasekar, V. Polarimetric Doppler Weather Radar: Principles and Applications; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
- Vulpiani, G.; Montopoli, M.; Picciotti, E.; Marzano, F.S. On the use of polarimetric X-band weather radar for volcanic ash clouds monitoring. In Proceedings of the AMS Radar Conference, Pittsburgh, PA, USA, 26–30 September 2011.
- Montopoli, M.; Vulpiani, G.; Cimini, D.; Picciotti, E.; Marzano, F.S. Interpretation of observed microwave signatures from ground dual polarization radar and space multi-frequency radiometer for the 2011 Grímsvötn volcanic eruption. Atmos. Meas. Tech. 2014, 7, 537–552. [Google Scholar] [CrossRef]
- Crouch, J.F.; Pardo, N.; Miller, C.A. Dual polarisation C-band weather radar imagery of the 6 August 2012 Te Maari Eruption, Mount Tongariro, New Zealand. J. Volcanol. Geotherm. Res. 2014, 286, 415–436. [Google Scholar] [CrossRef]
- Marzano, F.S.; Barbieri, S.; Vulpiani, G.; Rose, W.I. Volcanic ash cloud retrieval by ground-based microwave weather radar. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3235–3246. [Google Scholar] [CrossRef]
- Marzano, F.S.; Picciotti, E.; Montopoli, M.; Vulpiani, G. Inside volcanic clouds: Remote sensing of ash plumes using microwave weather radars. Bull. Am. Meteorol. Soc. 2013, 94, 1567–1586. [Google Scholar] [CrossRef]
- Marzano, F.S.; Picciotti, E.; Vulpiani, G.; Montopoli, M. Synthetic signatures of volcanic ash cloud particles from X-Band dual-polarization radar. IEEE Trans. Geosci. Remote Sens. 2012, 50, 193–211. [Google Scholar] [CrossRef]
- Prata, A.J.; Grant, I.F. Retrieval of microphysical and morphological properties of volcanic ash plumes from satellite data: Application to Mt. Ruapehu, New Zealand. Q. J. R. Meteorol. Soc. 2001, 127, 2153–2179. [Google Scholar] [CrossRef]
- The NCEP/NCAR Reanalysis Project at the NOAA/ESRL Physical Sciences Division. Available online: http://www.esrl.noaa.gov/psd/data/reanalysis/reanalysis.shtml (accessed on 1 January 2015).
- Corradini, S.; Spinetti, C.; Carboni, E.; Tirelli, C.; Buongiorno, M.F.; Pugnaghi, S.; Gangale, G. Mt. Etna tropospheric ash retrieval and sensitivity analysis using Moderate Resolution Imaging Spectroradiometer measurements. J. Appl. Remote Sens. 2008. [Google Scholar] [CrossRef]
- Zaksek, K.; Hort, M.; Zaletelj, J.; Langmann, B. Monitoring volcanic ash cloud top height through simultaneous retrieval of optical data from polar orbiting and geostationary satellites. Atmos. Chem. Phys. 2013, 13, 2589–2606. [Google Scholar] [CrossRef]
- Ondrejka, R.J.; Conover, J.H. Note on the stereo interpretation of nimbus II apt photography. Mon. Weather Rev. 1966, 94, 611–614. [Google Scholar] [CrossRef]
- Kinoschita, K. Observation of flow and dispersion of volcanic clouds from Mt. Sakurajima. Atmos. Environ. 1996, 30, 2831–2837. [Google Scholar] [CrossRef]
- Andronico, D.; Scollo, S.; Caruso, S.; Cristaldi, A. The 2002–03 Etna explosive activity: Tephra dispersal and features of the deposits. J. Geophys. Res. 2008, 113. [Google Scholar] [CrossRef]
- Camera Calibration Toolbox for Matlab. Available online: http://www.vision.caltech.edu/bouguetj/calib_doc/index.html (accessed on 1 January 2015).
- Zhang, Z. Flexible camera calibration by viewing a plane from unknown orientations. In Proceedings of the Seventh IEEE International Conference on Computer Vision (ICCV), Kerkyra, Greece, 20–27 September 1999; pp. 666–673.
- Scollo, S.; Prestifilippo, M.; Spata, G.; D’Agostino, M.; Coltelli, M. Monitoring and forecasting Etna volcanic plumes. Nat. Hazards Earth Syst. Sci. 2009, 9, 1573–1585. [Google Scholar] [CrossRef]
- Prata, A.J. Infrared radiative transfer calculations for volcanic ash clouds. Geophys. Res. Lett. 1989, 16, 1293–1296. [Google Scholar] [CrossRef]
- Merucci, L.; Zakšek, K.; Carboni, E.; Corradini, S. Stereoscopic estimation of volcanic ash cloud-top height from two geostationary satellites. In Proceedings of the 7th International Workshop on Volcanic Ash (IWVA/7), Anchorage, AK, USA, 19–23 October 2015.
- Chalon, G.; Cayla, F.; Diedel, D. IASI: An advance sounder for operational meterology. In Proceedings of the 52nd Congress of IAF, Toulouse, France, 1–5 October 2001.
- Hebert, P.; Blumstein, D.; Buil, C.; Carlier, T.; Chalon, G.; Astruc., P.; Clauss, A.; Simeoni, D.; Tournier, B. IASI instrument: Technical description and measured performances. In Proceedings of the 5th International Conference on Space Optics, Toulouse, France, 30 March–2 April 2004.
- Walker, J.; Dudhia, A.; Carboni, E. An effective method for the detection of trace species demonstrated using the MetOp Infrared Atmospheric Sounding Interferometer. Atmos. Meas. Tech. 2011, 4, 1567–1580. [Google Scholar] [CrossRef] [Green Version]
- Carboni, E.; Grainger, R.; Walker, J.; Dudhia, A.; Siddans, R. A new scheme for sulphur dioxide retrieval from IASI measurements: Application to the Eyjafjallajokull eruption of April and May 2010. Atmos. Chem. Phys. 2012, 12, 11417–11434. [Google Scholar] [CrossRef] [Green Version]
- Saunders, R.; Matricardi, M.; Brunel, P. An improved fast radiative transfer model for assimilation of satellite radiance observations. Q. J. R. Meteorol. Soc. 1999, 125, 1407–1425. [Google Scholar] [CrossRef]
- Thomas, G.E.; Poulsen, C.A.; Sayer, A.M.; Marsh, S.H.; Dean, S.M.; Carboni, E.; Siddans, R.; Grainger, R.G.; Lawrence, B.N. The GRAPE Aerosol Retrieval Algorithm. Atmos. Meas. Tech. 2009, 2, 679–701. [Google Scholar] [CrossRef]
- Poulsen, C.A.; Siddans, R.; Thomas, G.E.; Sayer, A.M.; Grainger, R.G.; Campmany, E.; Dean, S.M.; Arnold, C.; Watts, P.D. Cloud retrievals from satellite data using optimal estimation: Evaluation and application to ATSR. Atmos. Meas. Tech. 2012, 5, 1889–1910. [Google Scholar] [CrossRef]
- Corradini, S.; Merucci, L.; Arnau, F. Volcanic ash cloud properties: Comparison between MODIS satellite retrievals and FALL3D transport model. IEEE Geosci. Remote Sens. Lett. 2011, 8, 248–252. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Corradini, S.; Montopoli, M.; Guerrieri, L.; Ricci, M.; Scollo, S.; Merucci, L.; Marzano, F.S.; Pugnaghi, S.; Prestifilippo, M.; Ventress, L.J.; et al. A Multi-Sensor Approach for Volcanic Ash Cloud Retrieval and Eruption Characterization: The 23 November 2013 Etna Lava Fountain. Remote Sens. 2016, 8, 58. https://0-doi-org.brum.beds.ac.uk/10.3390/rs8010058
Corradini S, Montopoli M, Guerrieri L, Ricci M, Scollo S, Merucci L, Marzano FS, Pugnaghi S, Prestifilippo M, Ventress LJ, et al. A Multi-Sensor Approach for Volcanic Ash Cloud Retrieval and Eruption Characterization: The 23 November 2013 Etna Lava Fountain. Remote Sensing. 2016; 8(1):58. https://0-doi-org.brum.beds.ac.uk/10.3390/rs8010058
Chicago/Turabian StyleCorradini, Stefano, Mario Montopoli, Lorenzo Guerrieri, Matteo Ricci, Simona Scollo, Luca Merucci, Frank S. Marzano, Sergio Pugnaghi, Michele Prestifilippo, Lucy J. Ventress, and et al. 2016. "A Multi-Sensor Approach for Volcanic Ash Cloud Retrieval and Eruption Characterization: The 23 November 2013 Etna Lava Fountain" Remote Sensing 8, no. 1: 58. https://0-doi-org.brum.beds.ac.uk/10.3390/rs8010058