
Multispectral Radiometric Analysis of Façades to Detect Pathologies from Active and Passive Remote Sensing


 ,
,  and
and 
Abstract
:
1. Introduction
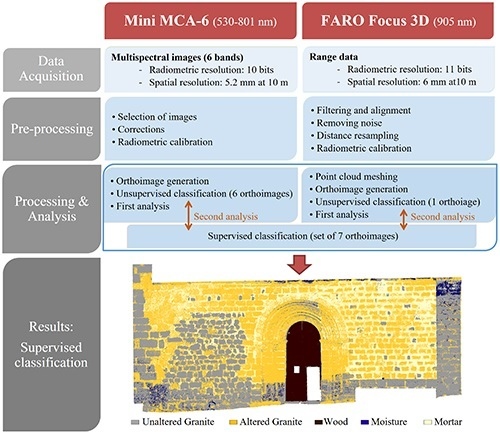
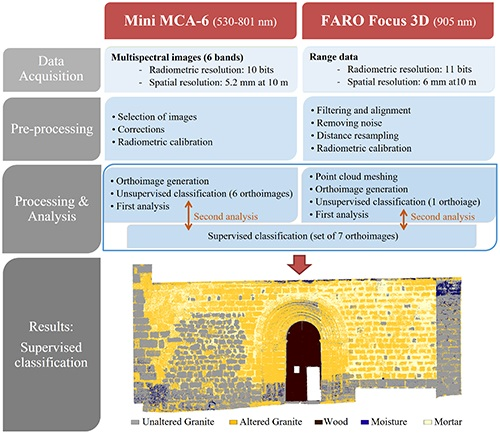
2. Material and Methods

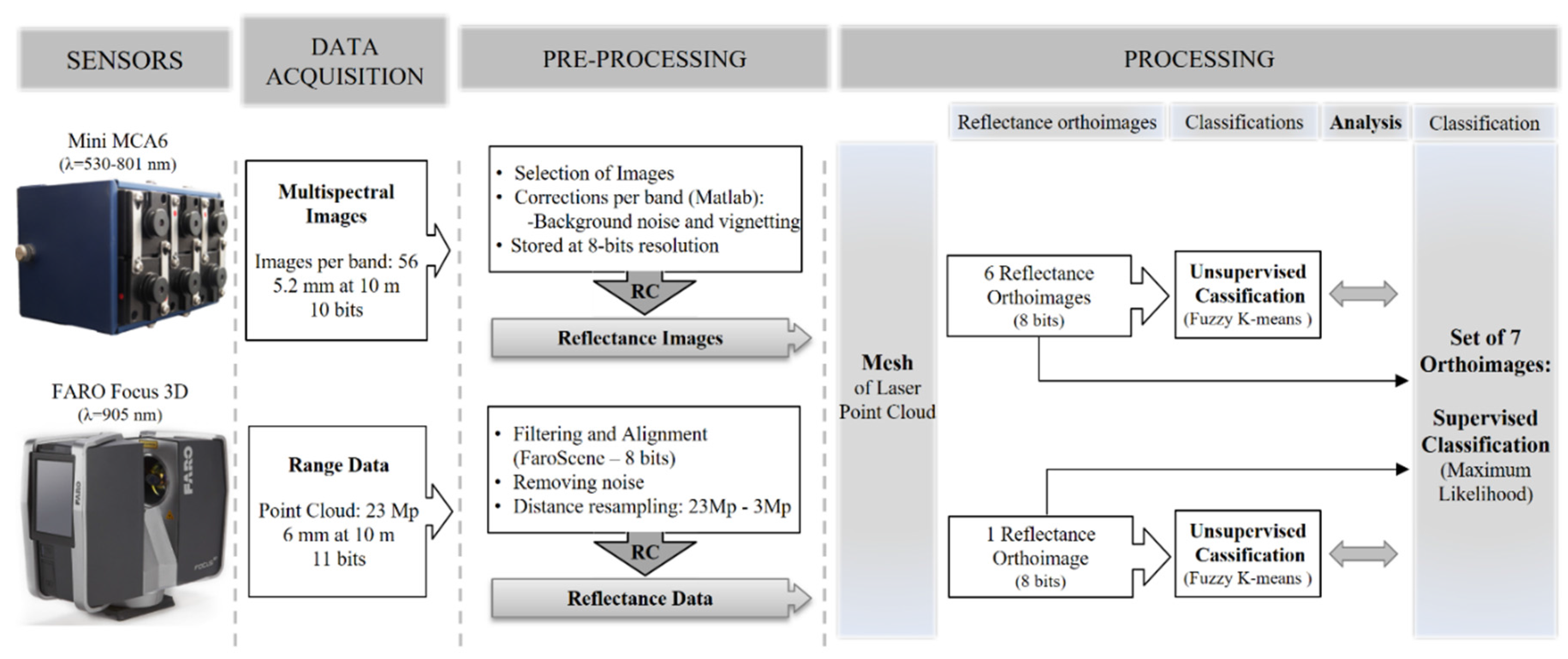
2.1. Equipment

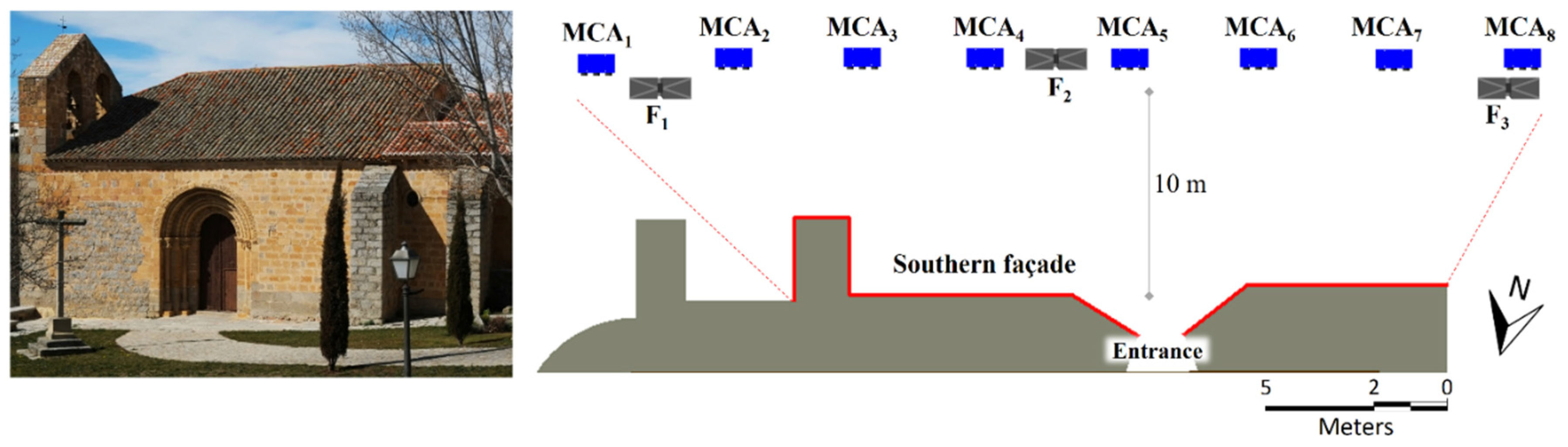
2.2. Data Acquisition
2.3. Pre-Processing
2.3.1. Multispectral Images Corrections
2.3.2. Filtering and Alignment of the Point Clouds
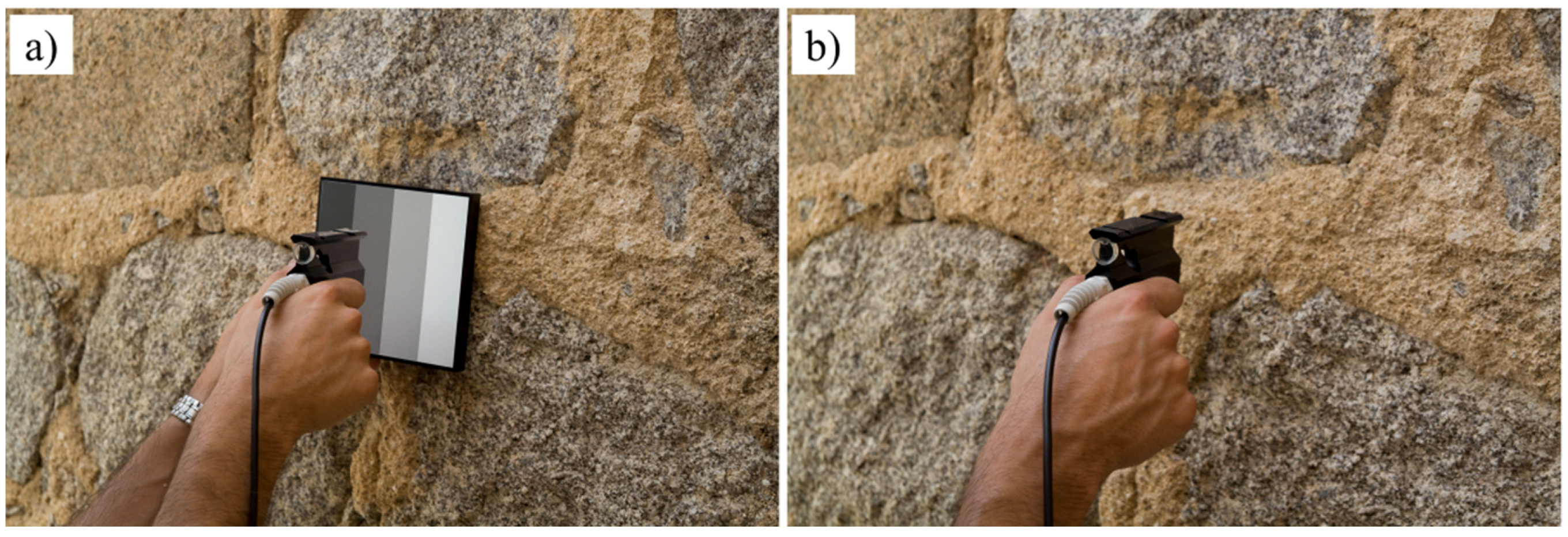
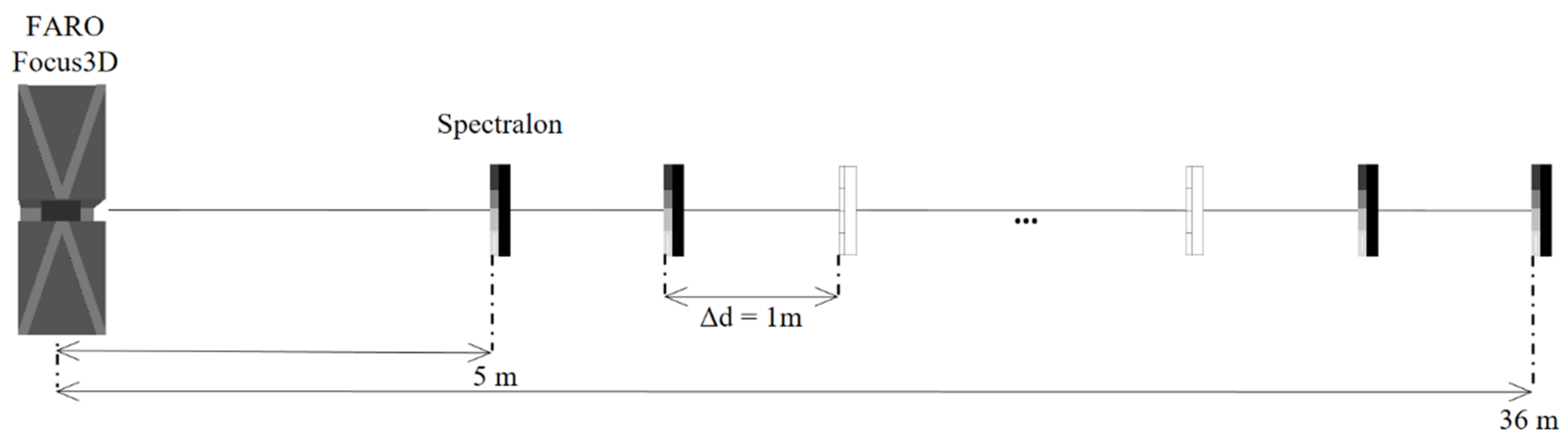
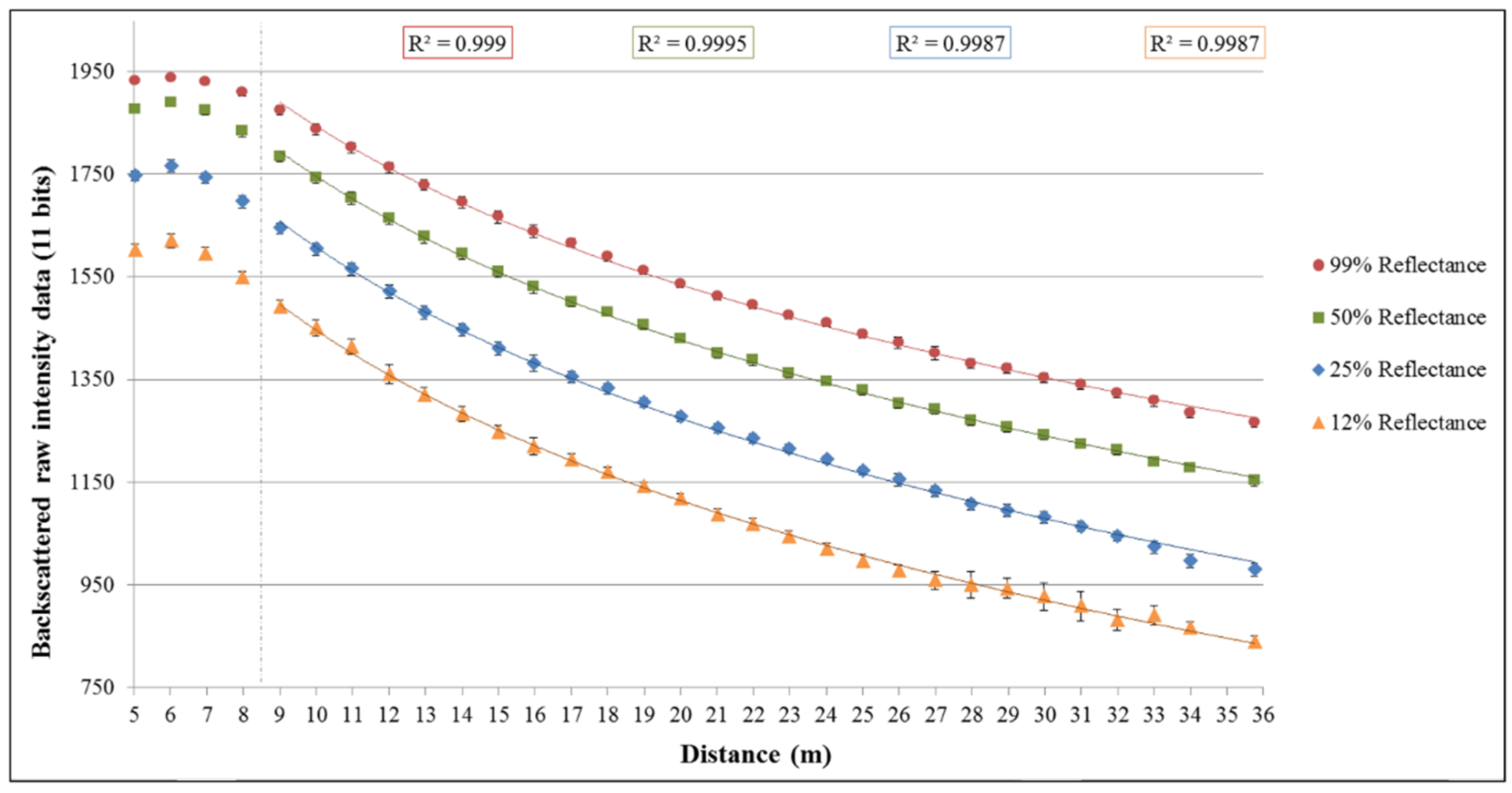
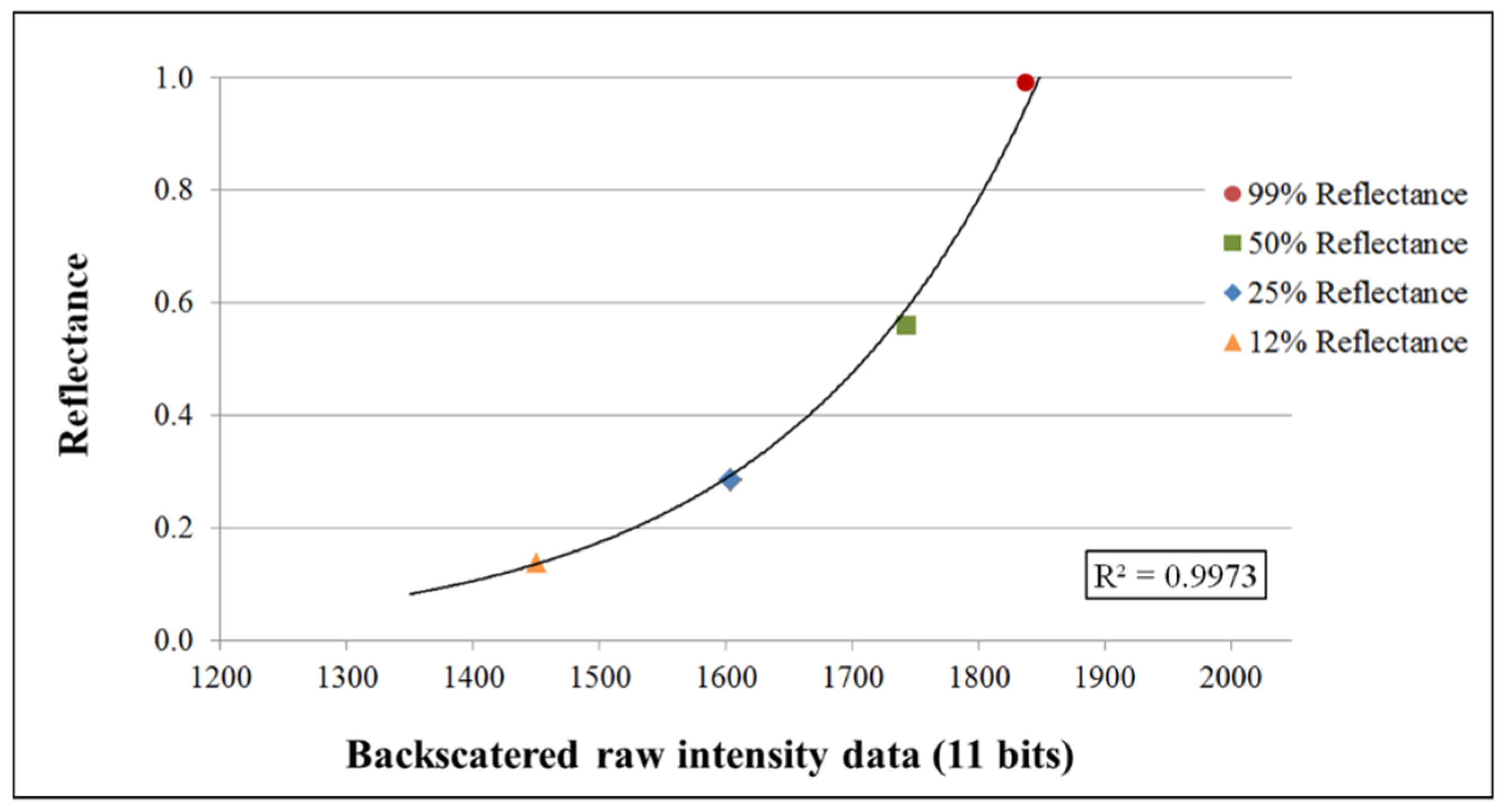
2.3.3. Radiometric Calibrations

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bands | c0λ | c1λ | R2 |
|---|---|---|---|
| 530 nm | 0.000264 | 0.057718 | 0.9816 |
| 672 nm | −0.000795 | 0.050005 | 0.9823 |
| 700 nm | −0.000861 | 0.041353 | 0.9820 |
| 742 nm | −0.001205 | 0.074335 | 0.9843 |
| 778 nm | −0.001510 | 0.047292 | 0.9846 |
| 801 nm | −0.000834 | 0.047656 | 0.9827 |



2.4. Processing
2.4.1. Orthoimages Generation
2.4.2. Orthoimages Classifications
3. Experimental Results


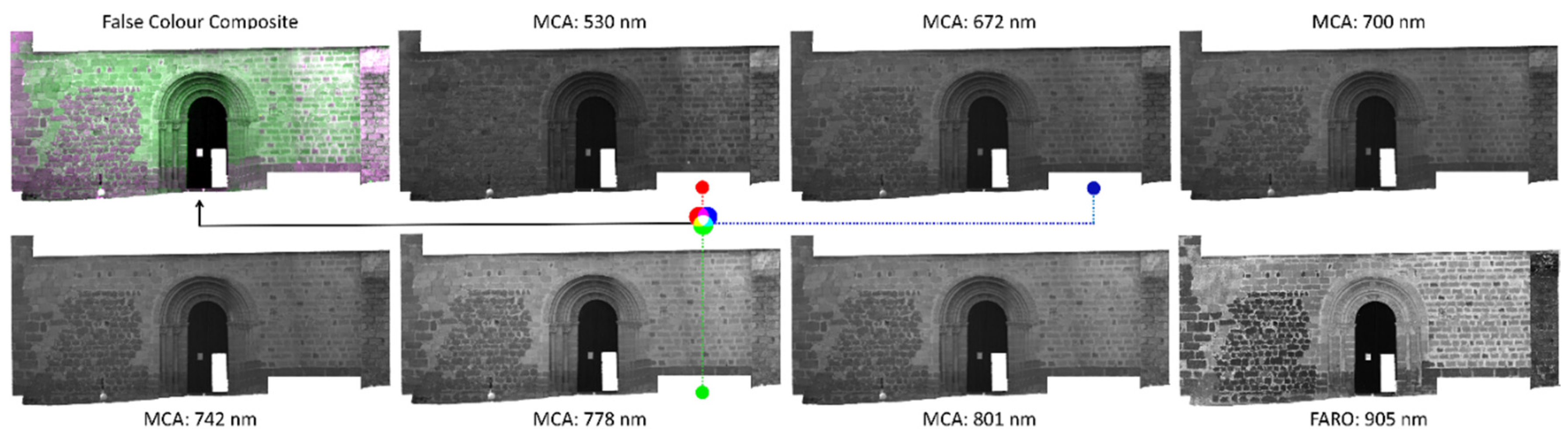
3.1. Reflectance Orthoimages


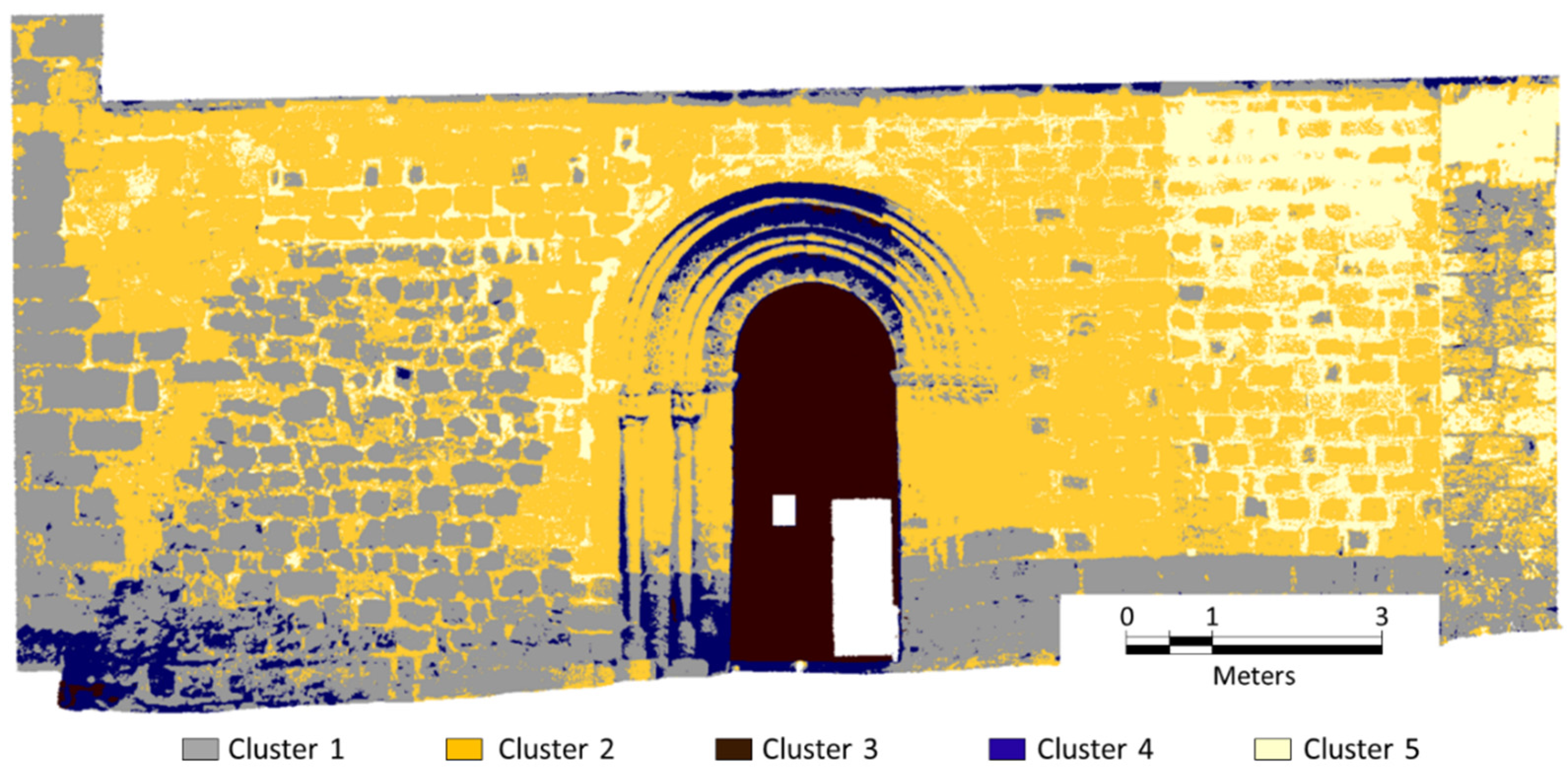
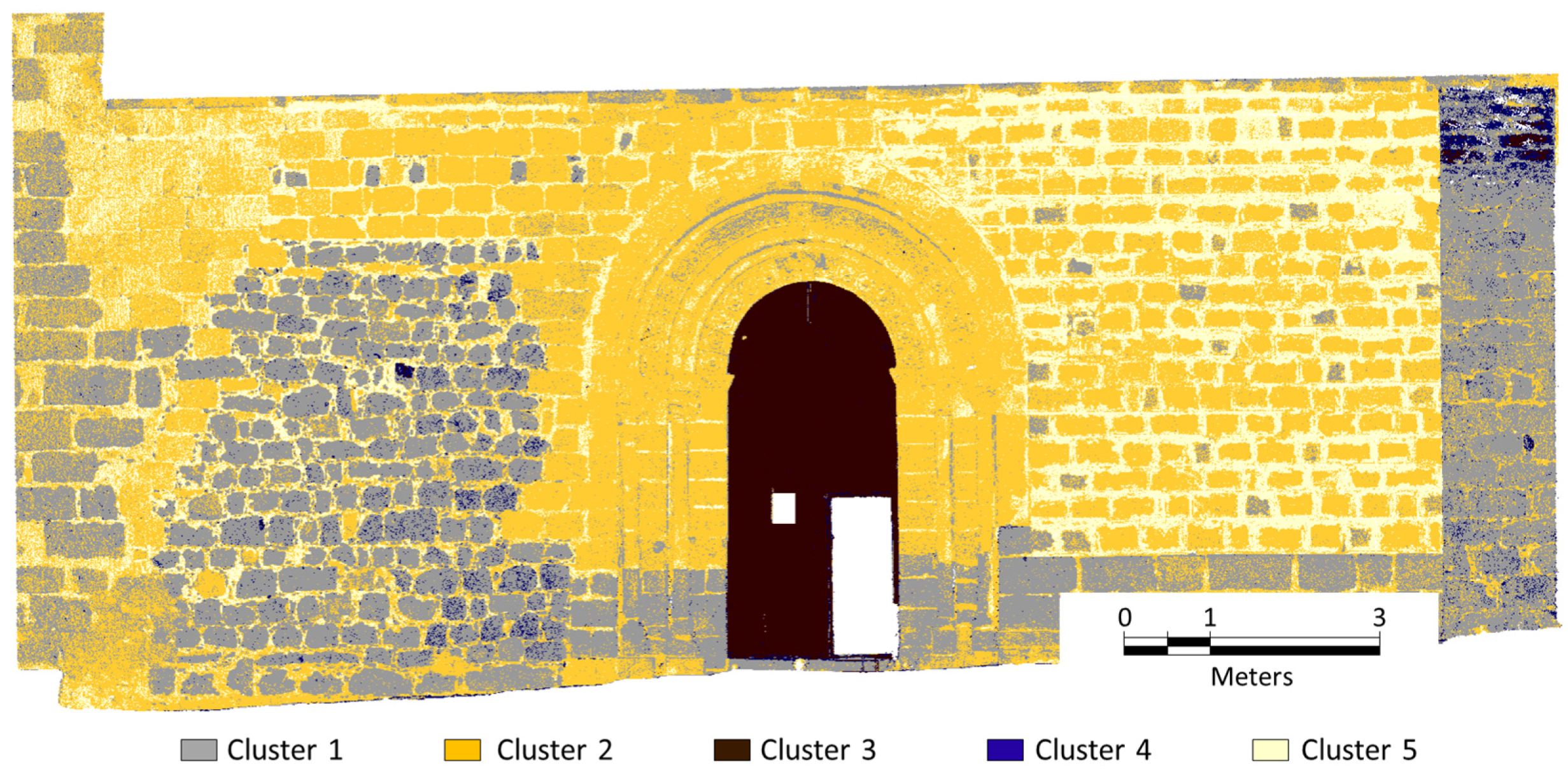
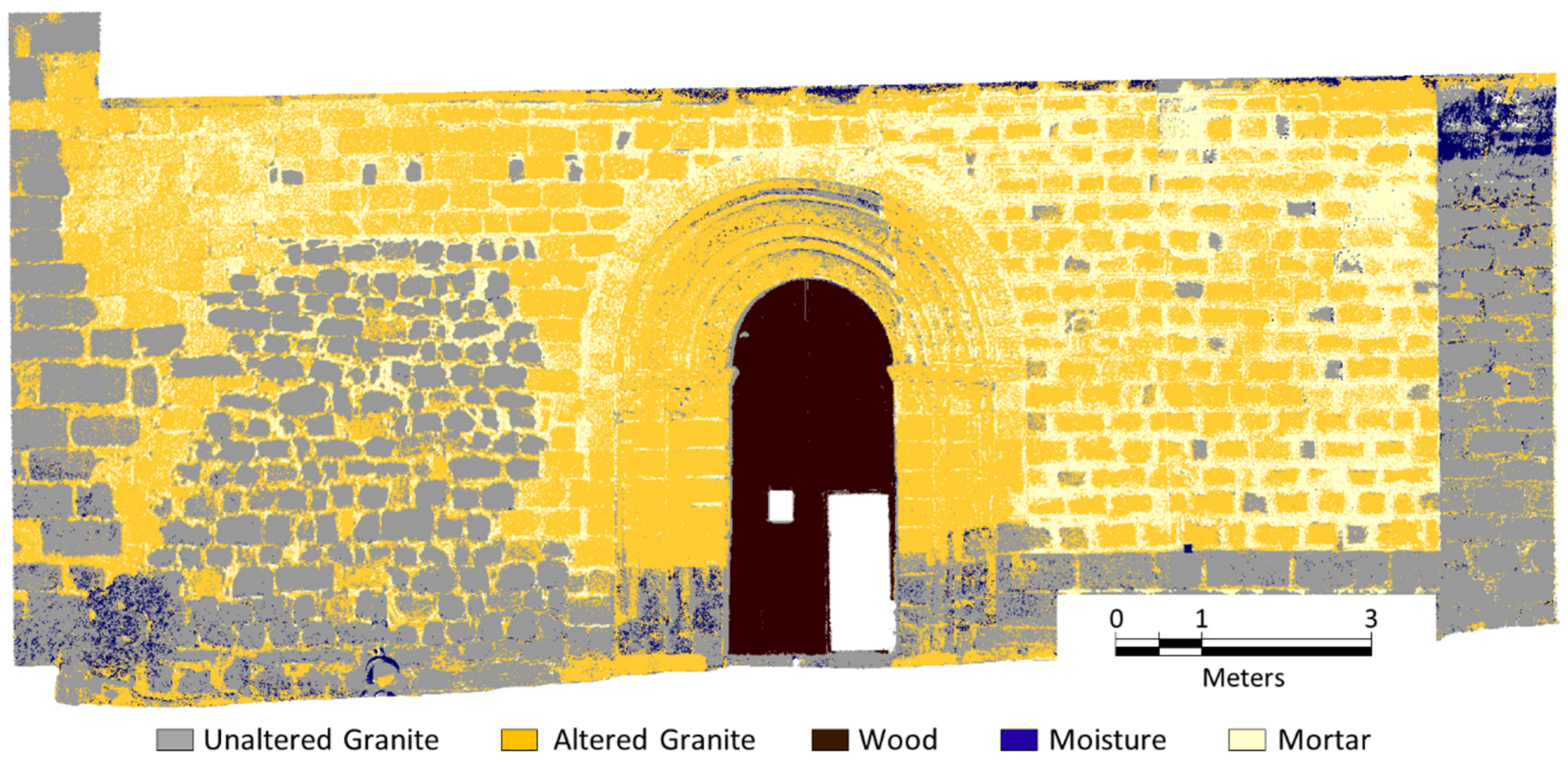
3.2. Orthoimages Classifications

| Class | Reference Map | Multispectral Map | Laser Map |
|---|---|---|---|
| Unaltered granite | 30.04% | 28.53% | 27.33% |
| Altered granite | 42.60% | 48.06% | 47.27% |
| Wood | 5.35% | 5.67% | 5.82% |
| Moisture | 1.88% | 4.74% | 1.31% |
| Mortar | 20.13% | 13.00% | 18.27% |
| Unaltered Granite | Altered Granite | Wood | Moisture | |
|---|---|---|---|---|
| Altered granite | 1.87 | - | - | - |
| Wood | 2.00 | 2.00 | - | - |
| Moisture | 1.99 | 1.99 | 2.00 | - |
| Mortar | 1.98 | 1.42 | 2.00 | 2.00 |
3.3. Accuracy Assessment

| Moisture | Mortar | Altered Granite | Unaltered Granite | Wood | User Accuracy | |
|---|---|---|---|---|---|---|
| Moisture | 40.14% | 25.40% | 0.54% | 33.92% | 0.01% | 40.14% |
| Mortar | 0.06% | 39.11% | 59.53% | 1.31% | 0.00% | 39.11% |
| Altered granite | 3.79% | 7.69% | 73.86% | 14.61% | 0.05% | 73.86% |
| Unaltered granite | 6.56% | 5.30% | 16.39% | 70.75% | 1.01% | 70.75% |
| Wood | 0.00% | 0.00% | 0.00% | 0.00% | 100.00% | 100.00% |
| Producer accuracy | 21.10% | 57.71% | 66.00% | 74.28% | 94.26% | |
| Overall accuracy: | 66.04% | |||||
| Moisture | Mortar | Altered Granite | Unaltered granite | Wood | User Accuracy | |
|---|---|---|---|---|---|---|
| Moisture | 52.46% | 1.04% | 23.17% | 19.81% | 3.52% | 52.46% |
| Mortar | 0.00% | 60.46% | 37.36% | 2.18% | 0.00% | 60.46% |
| Altered granite | 0.05% | 12.81% | 78.29% | 8.64% | 0.20% | 78.29% |
| Unaltered granite | 0.29% | 1.49% | 21.70% | 75.47% | 1.04% | 75.47% |
| Wood | 0.48% | 0.00% | 0.00% | 0.00% | 99.52% | 99.52% |
| Producer accuracy | 89.64% | 68.32% | 68.68% | 83.62% | 91.81% | |
| Overall accuracy: | 74.39% | |||||
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Marszalek, M. Deterioration of stone in some monuments exposed to air pollution: A Cracow case study. In Air Pollution and Cultural heritage; Taylor and Francis: London, UK, 2004; pp. 151–154. [Google Scholar]
- Corvo, F.; Reyes, J.; Valdes, C.; Villaseñor, F.; Cuesta, O.; Aguilar, D.; Quintana, P. Influence of air pollution and humidity on limestone materials degradation in historical buildings located in cities under tropical coastal climates. Water Air Soil Pollut. 2010, 205, 359–375. [Google Scholar] [CrossRef]
- Fort, R.; de Azcona, M.L.; Mingarro, F. Assessment of protective treatment based on their chromatic evolution: Limestone and granite in the Royal Palace of Madrid, Spain. In Protection and Conservation of the Cultural Heritage in the Mediterranean Cities; Galan, E., Zezza, F., Eds.; CRC Press/Balkema: Sevilla, Spain, 2002; pp. 437–441. [Google Scholar]
- Weritz, F.; Kruschwitz, S.; Maierhofer, C.; Wendrich, A. Assessment of moisture and salt contents in brick masonry with microwave transmission, spectral-induced polarization, and laser-induced breakdown spectroscopy. Int. J. Archit. Herit. 2009, 3, 126–144. [Google Scholar] [CrossRef]
- Lambers, K.; Eisenbeiss, H.; Sauerbier, M.; Kupferschmidt, D.; Gaisecker, T.; Sotoodeh, S.; Hanusch, T. Combining photogrammetry and laser scanning for the recording and modelling of the late intermediate period site of pinchango alto, Palpa, Peru. J. Archaeol. Sci. 2007, 34, 1702–1712. [Google Scholar] [CrossRef]
- González-Aguilera, D.; Gómez-Lahoz, J.; Sánchez, J. A new approach for structural monitoring of large dams with a three-dimensional laser scanner. Sensors 2008, 8, 5866–5883. [Google Scholar] [CrossRef]
- Buckley, S.J.; Howell, J.; Enge, H.; Kurz, T. Terrestrial laser scanning in geology: Data acquisition, processing and accuracy considerations. J. Geol. Soc. 2008, 165, 625–638. [Google Scholar] [CrossRef]
- Armesto, J.; Ordóñez, C.; Alejano, L.; Arias, P. Terrestrial laser scanning used to determine the geometry of a granite boulder for stability analysis purposes. Geomorphology 2009, 106, 271–277. [Google Scholar] [CrossRef]
- Höfle, B.; Pfeifer, N. Correction of laser scanning intensity data: Data and model-driven approaches. ISPRS J. Photogramm. Remote Sens. 2007, 62, 415–433. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Kukko, A.; Lindroos, T.; Litkey, P.; Kaartinen, H.; Hyyppä, J.; Ahokas, E. Brightness measurements and calibration with airborne and terrestrial laser scanners. IEEE Trans. Geosci. Remote Sens. 2008, 46, 528–534. [Google Scholar] [CrossRef]
- Franceschi, M.; Teza, G.; Preto, N.; Pesci, A.; Galgaro, A.; Girardi, S. Discrimination between marls and limestones using intensity data from terrestrial laser scanner. ISPRS J. Photogramm. Remote Sens. 2009, 64, 522–528. [Google Scholar] [CrossRef]
- Lichti, D.D. Spectral filtering and classification of terrestrial laser scanner point clouds. Photogramm. Record 2005, 20, 218–240. [Google Scholar] [CrossRef]
- Mather, P.; Tso, B. Classification Methods for Remotely Sensed Data, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Lerma, J.L. Multiband versus multispectral supervised classification of architectural images. Photogramm. Record 2001, 17, 89–101. [Google Scholar] [CrossRef]
- Lerma, J.L. Automatic plotting of architectural facades with multispectral images. J. Surv. Eng. 2005, 131, 73–77. [Google Scholar] [CrossRef]
- Ruiz, L.; Lerma, J.; Gimeno, J. Application of computer vision techniques to support in the restoration of historical buildings. ISPRS Int. Arch. Photogramm. Remote Sens. Spatl. Inf. Sci. 2002, 34, 227–230. [Google Scholar]
- Hemmleb, M.; Weritz, F.; Schiemenz, A.; Grote, A.; Maierhofer, C. Multi-spectral data acquisition and processing techniques for damage detection on building surfaces. In Proceedings of the ISPRS Commission V Symposium “Image Engineering and Vision Metrology”, Dresden, Germany, 25–27 September 2006.
- Del Pozo, S.; Herrero-Pascual, J.; Felipe-García, B.; Hernández-López, D.; Rodríguez-Gonzálvez, P.; González-Aguilera, D. Multi-sensor radiometric study to detect pathologies in historical buildings. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W4, 193–200. [Google Scholar] [CrossRef]
- López, D.H.; García, B.F.; Piqueras, J.G.; Alcázar, G.V. An approach to the radiometric aerotriangulation of photogrammetric images. ISPRS J. Photogramm. Remote Sens. 2011, 66, 883–893. [Google Scholar] [CrossRef]
- Del Pozo, S.; Rodríguez-Gonzálvez, P.; Hernández-López, D.; Felipe-García, B. Vicarious radiometric calibration of a multispectral camera on board an unmanned aerial system. Remote Sens. 2014, 6, 1918–1937. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Ahokas, E.; Hyyppä, J.; Suomalainen, J. Study of surface brightness from backscattered laser intensity: Calibration of laser data. IEEE Geosci. Remote Sens. Lett. 2005, 2, 255–259. [Google Scholar] [CrossRef]
- Soudarissanane, S.; Lindenbergh, R.; Menenti, M.; Teunissen, P. Scanning geometry: Influencing factor on the quality of terrestrial laser scanning points. ISPRS J. Photogramm. Remote Sens. 2011, 66, 389–399. [Google Scholar] [CrossRef]
- Al-amri, S.S.; Kalyankar, N.V.; Khamitkar, S.D. A comparative study of removal noise from remote sensing image. Int. J. Comput. Sci. Issue 2010, 7, 32–36. [Google Scholar]
- Zheng, Y.; Lin, S.; Kambhamettu, C.; Yu, J.; Kang, S.B. Single-image vignetting correction. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 2243–2256. [Google Scholar] [CrossRef] [PubMed]
- Reshetyuk, Y. Self-Calibration and Direct Georeferencing in Terrestrial Laser Scanning. Doctoral Thesis in Infrastructure, Geodesy; Royal Institute of Technology (KTH): Stockholm, Suecia, 2009. [Google Scholar]
- Honkavaara, E.; Arbiol, R.; Markelin, L.; Martinez, L.; Cramer, M.; Bovet, S.; Chandelier, L.; Ilves, R.; Klonus, S.; Marshal, P. Digital airborne photogrammetry—A new tool for quantitative remote sensing? A state-of-the-art review on radiometric aspects of digital photogrammetric images. Remote Sens. 2009, 1, 577–605. [Google Scholar] [CrossRef] [Green Version]
- Biggar, S.; Slater, P.; Gellman, D. Uncertainties in the in-flight calibration of sensors with reference to measured ground sites in the 0.4–1.1 μm range. Remote Sens. Environ. 1994, 48, 245–252. [Google Scholar] [CrossRef]
- Dinguirard, M.; Slater, P.N. Calibration of space-multispectral imaging sensors: A review. Remote Sens. Environ. 1999, 68, 194–205. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Krooks, A.; Kukko, A.; Kaartinen, H. Radiometric calibration of terrestrial laser scanners with external reference targets. Remote Sens. 2009, 1, 144–158. [Google Scholar] [CrossRef]
- Jelalian, A.V. Laser Radar Systems; Artech House: New York, NY, USA, 1992. [Google Scholar]
- Bourke, P. An algorithm for interpolating irregularly-spaced data with applications in terrain modelling. In Proceedingsof the Pan Pacific Computer Conference, Beijing, China, 1 January 1989.
- Attene, M. A lightweight approach to repairing digitized polygon meshes. Vis. Comput. 2010, 26, 1393–1406. [Google Scholar] [CrossRef]
- Kraus, K. Photogrammetry: Geometry from Images and Laser Scans, 2nd ed.; Walter de Gruyter: Berlin, Germany, 2007. [Google Scholar]
- Albertz, J.; Kreiling, W. Photogrammetrisches Taschenbuch; Herbert Wichmann Verlag: Berlin, Germany, 1989. [Google Scholar]
- Bezdek, J.C. Pattern Recognition with Fuzzy Objective Function Algorithms; Plenum Press: New York, NY, USA, 1981. [Google Scholar]
- Kannan, S.; Sathya, A.; Ramathilagam, S.; Pandiyarajan, R. New robust fuzzy C-Means based gaussian function in classifying brain tissue regions. In Contemporary Computing; Ranka, S., Aluru, S., Buyya, R., Chung, Y.-C., Dua, C., Grama, A., Gupta, S.K.S., Kumar, R., Phoha, V.V., Eds.; Springer: Berlin, Germany, 2009; pp. 158–169. [Google Scholar]
- Richards, J.A. Remote Sensing Digital Image Analysis; Springer: Berlin, Germany, 1999; Volume 3. [Google Scholar]
- Lillesand, T.; Kiefer, R.W.; Chipman, J. Remote Sensing and Image Interpretation, 7th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- García, F.A.F. La Invención de la Iglesia de san Segundo. Cofrades y Frailes Abulenses en los Siglos xvi y xvii; Institución Gran Duque de Alba: Ávila, Spain, 2006. [Google Scholar]
- Rantanen, J.; Antikainen, O.; Mannermaa, J.-P.; Yliruusi, J. Use of the near-infrared reflectance method for measurement of moisture content during granulation. Pharm. Dev. Technol. 2000, 5, 209–217. [Google Scholar] [CrossRef] [PubMed]
- Davis, S.M.; Landgrebe, D.A.; Phillips, T.L.; Swain, P.H.; Hoffer, R.M.; Lindenlaub, J.C.; Silva, L.F. Remote Sensing: The Quantitative Approach; McGraw-Hill International Book Co.: New York, NY, USA, 1978. [Google Scholar]
- Tolpekin, V.; Stein, A. Quantification of the effects of land-cover-class spectral separability on the accuracy of markov-random-field-based superresolution mapping. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3283–3297. [Google Scholar] [CrossRef]
- Cohen, J. Weighted kappa: Nominal scale agreement provision for scaled disagreement or partial credit. Psychol. Bull. 1968, 70, 213–220. [Google Scholar] [CrossRef] [PubMed]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Del Pozo, S.; Herrero-Pascual, J.; Felipe-García, B.; Hernández-López, D.; Rodríguez-Gonzálvez, P.; González-Aguilera, D. Multispectral Radiometric Analysis of Façades to Detect Pathologies from Active and Passive Remote Sensing. Remote Sens. 2016, 8, 80. https://0-doi-org.brum.beds.ac.uk/10.3390/rs8010080
Del Pozo S, Herrero-Pascual J, Felipe-García B, Hernández-López D, Rodríguez-Gonzálvez P, González-Aguilera D. Multispectral Radiometric Analysis of Façades to Detect Pathologies from Active and Passive Remote Sensing. Remote Sensing. 2016; 8(1):80. https://0-doi-org.brum.beds.ac.uk/10.3390/rs8010080
Chicago/Turabian StyleDel Pozo, Susana, Jesús Herrero-Pascual, Beatriz Felipe-García, David Hernández-López, Pablo Rodríguez-Gonzálvez, and Diego González-Aguilera. 2016. "Multispectral Radiometric Analysis of Façades to Detect Pathologies from Active and Passive Remote Sensing" Remote Sensing 8, no. 1: 80. https://0-doi-org.brum.beds.ac.uk/10.3390/rs8010080