
Evaluation of Methods for Aerodynamic Roughness Length Retrieval from Very High-Resolution Imaging LIDAR Observations over the Heihe Basin in China


Abstract
:
1. Introduction
2. Theoretical Background
2.1. Energy Balance at the Land Surface
2.2. Parameterization of Turbulent Heat Fluxes
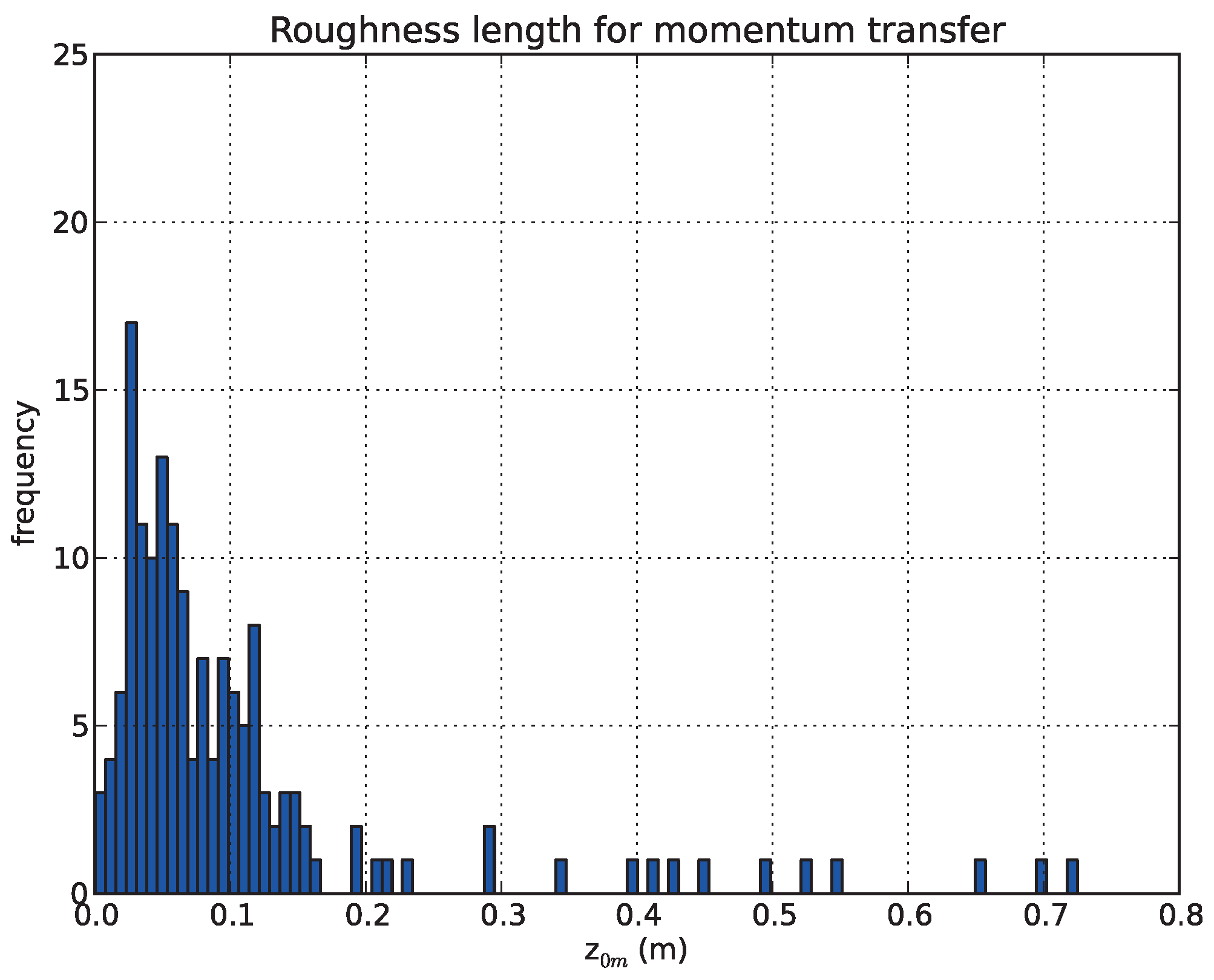
2.3. Characterization of the Surface Roughness
2.3.1. Geometry of Canopy to Parameterize Aerodynamic Roughness
2.3.2. Modeling Air Flow
3. Study Area and Materials
3.1. Heihe River Basin and the Yingke Oasis
3.2. Airborne VNIR & TIR Radiometric Data
3.3. Airborne LIDAR
3.4. Meteorological Data
4. Characterization of the Land Surface
4.1. Land Surface Parameters Retrieval
4.1.1. Albedo
4.1.2. Normalized Difference Vegetation Index
4.1.3. Leaf Area Index
4.1.4. Fractional Vegetation Cover
4.1.5. Land Surface Temperature and Emissivity
4.2. Models for Roughness Length Retrieval
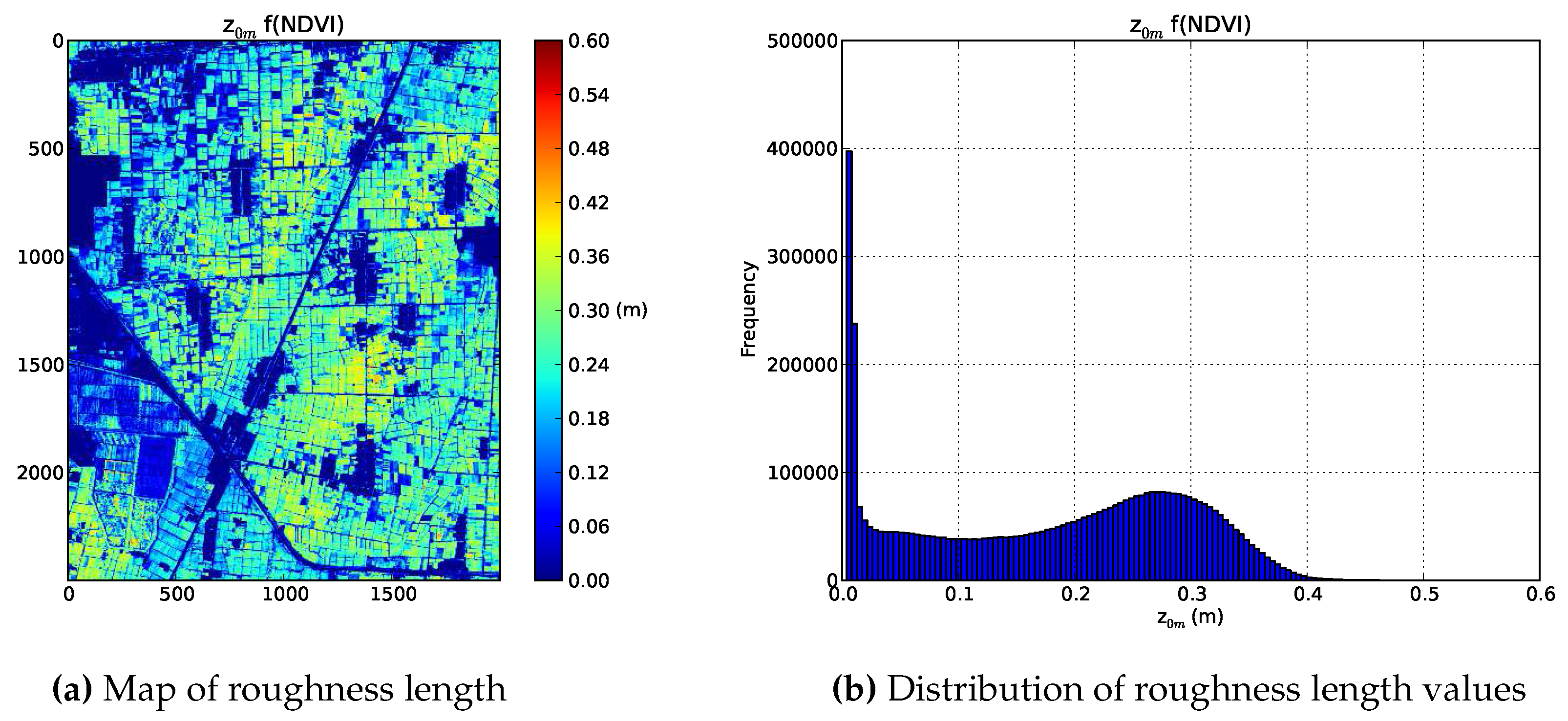
4.2.1. Roughness Length from NDVI
4.2.2. Roughness Length as a Fraction of Vegetation Height
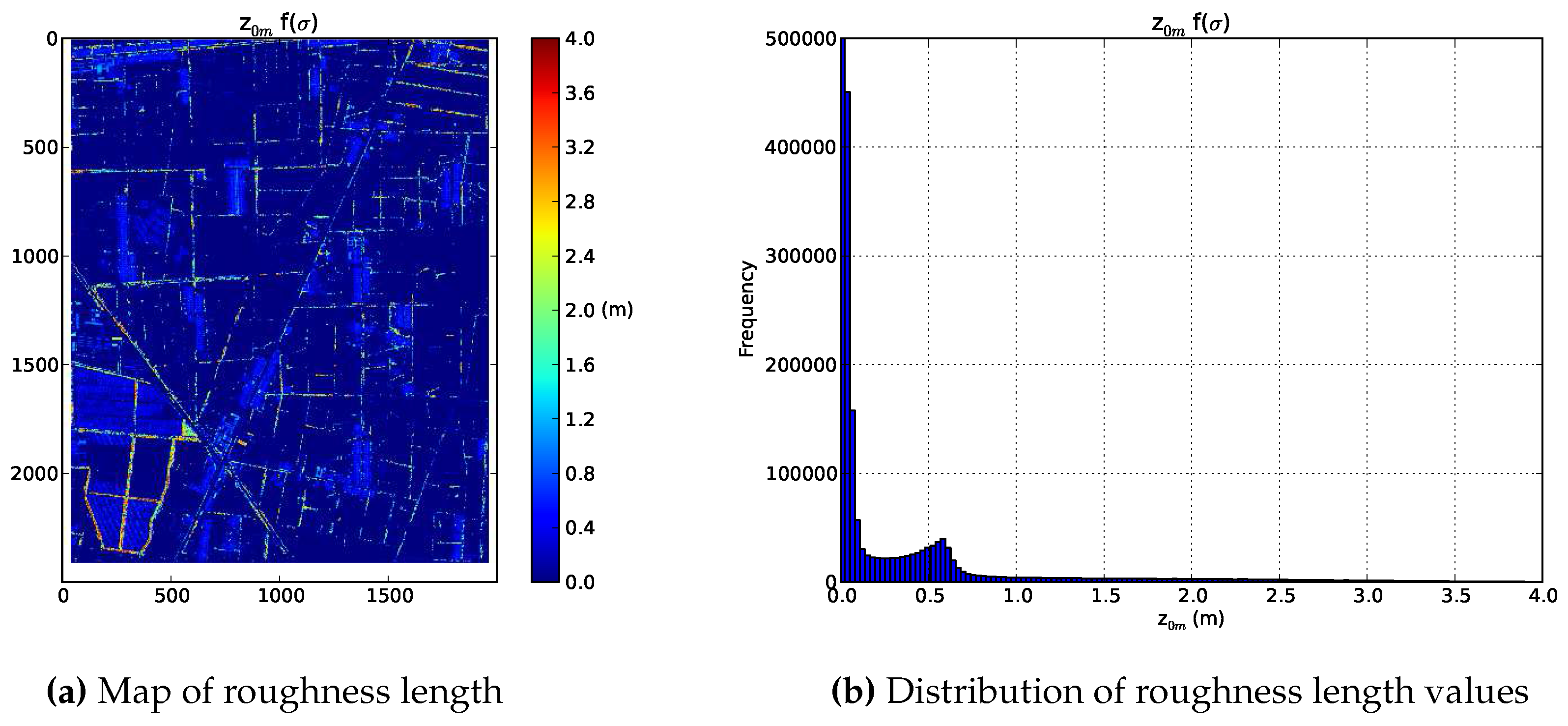
4.2.3. Roughness Length as a Function of the Standard Deviation of Vegetation Height
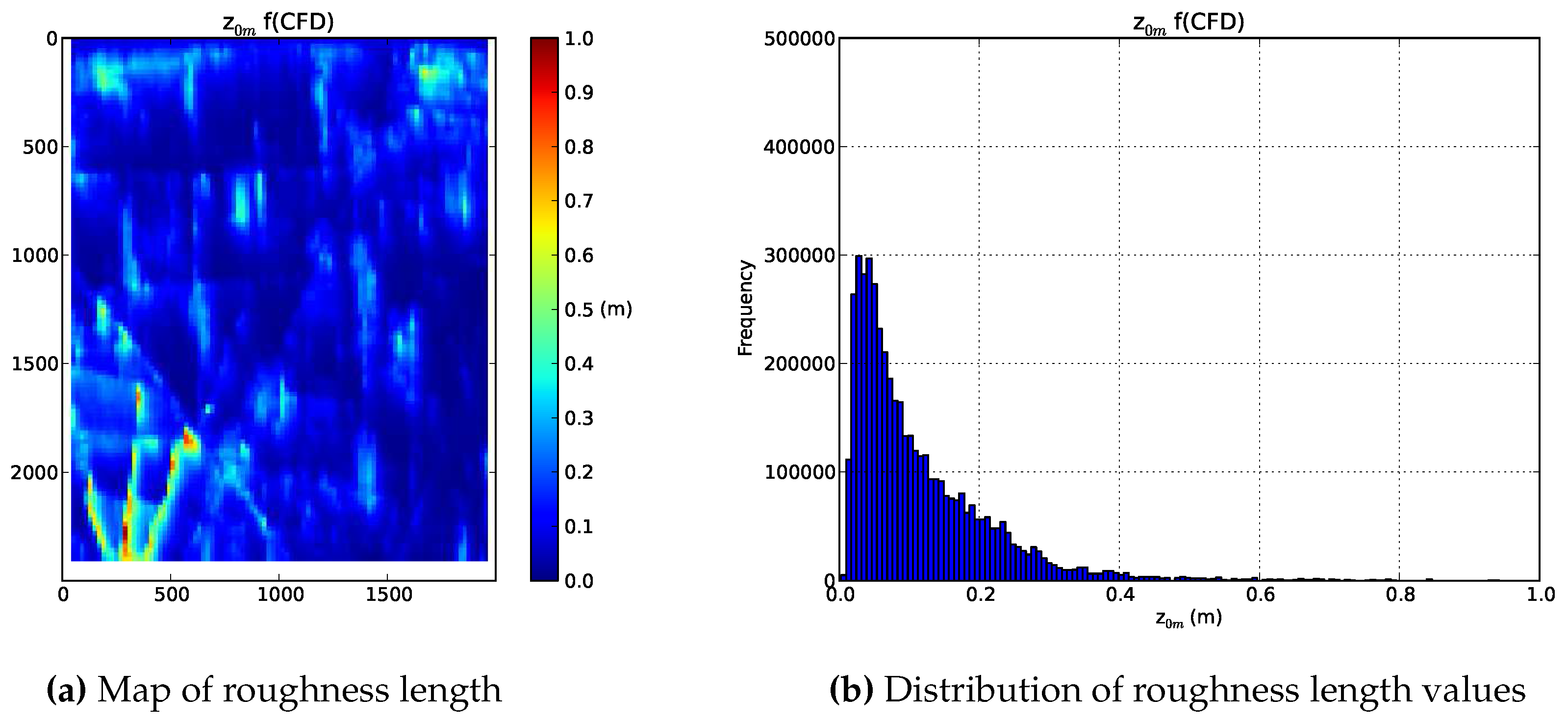
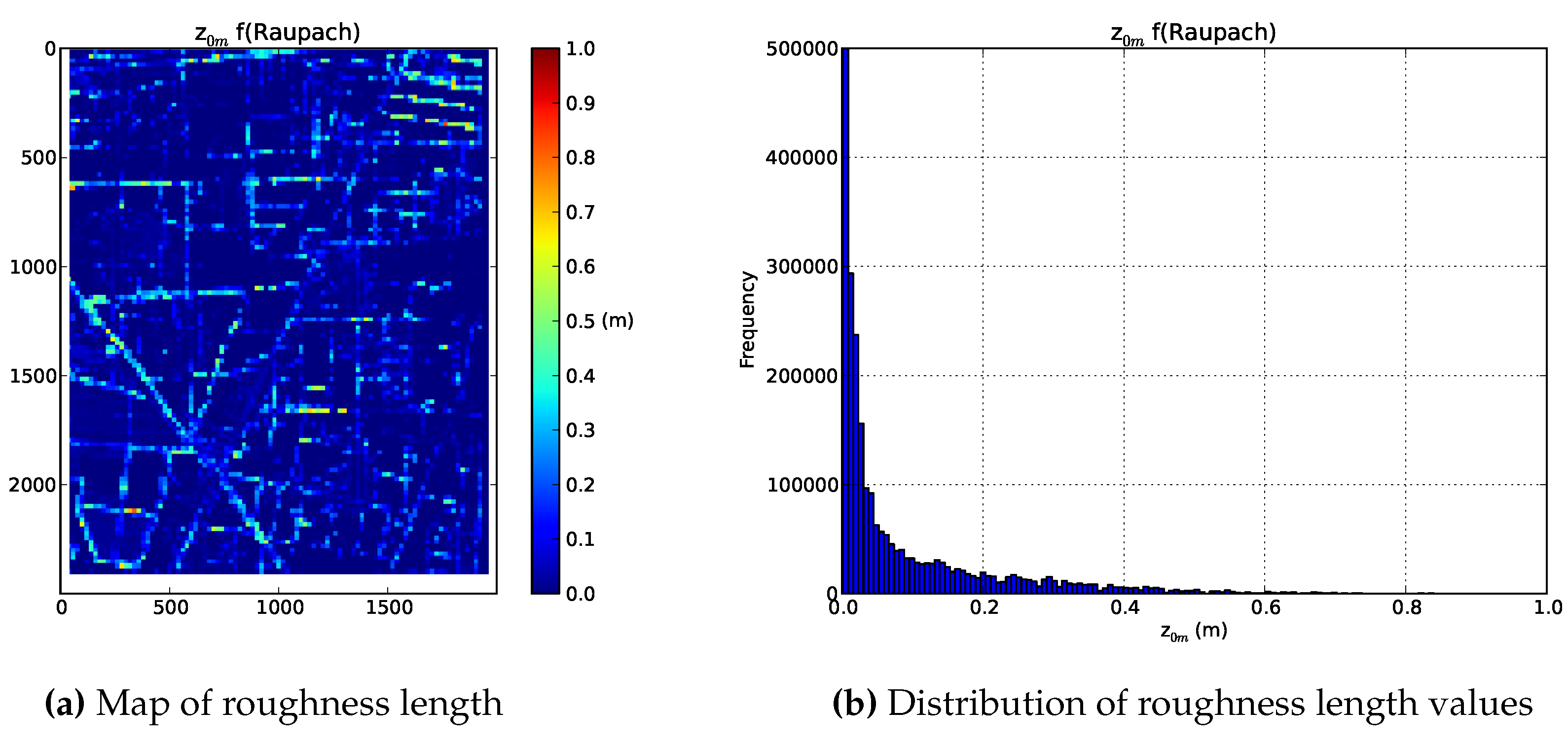
4.2.4. Roughness Length from Raupach’s Formulations and CFD Model
4.2.5. Design of the Different Experiments
- -
- the first experiment is considered as the ”by default” case for a SEBS calculation, with assumed to be function of NDVI, and and to be a fraction of roughness length.
- -
- the second experiment is a kind of improved ”by default” configuration. The vegetation height is provided by the LIDAR data and and formulations remain the same as before.
- -
- the third one integrates the effective aerodynamic roughness length retrieved by following Menenti and Ritchie [17]. The vegetation height is provided by the LIDAR data and is still considered proportional to .
- -
- the fourth one includes values retrieved from the inversion of the CFD windfield over the Yingke area. The resolution of roughness data is 25 m, resampled to 1.25 m in order to match with VNIR data. is also derived from LIDAR data and proportional to .
- -
- the last experiment integrates and values computed using Raupach’s formulations. Here again the initial computing resolution is 25 m, resampled to the VNIR data resolution. The vegetation height is provided by the LIDAR data.
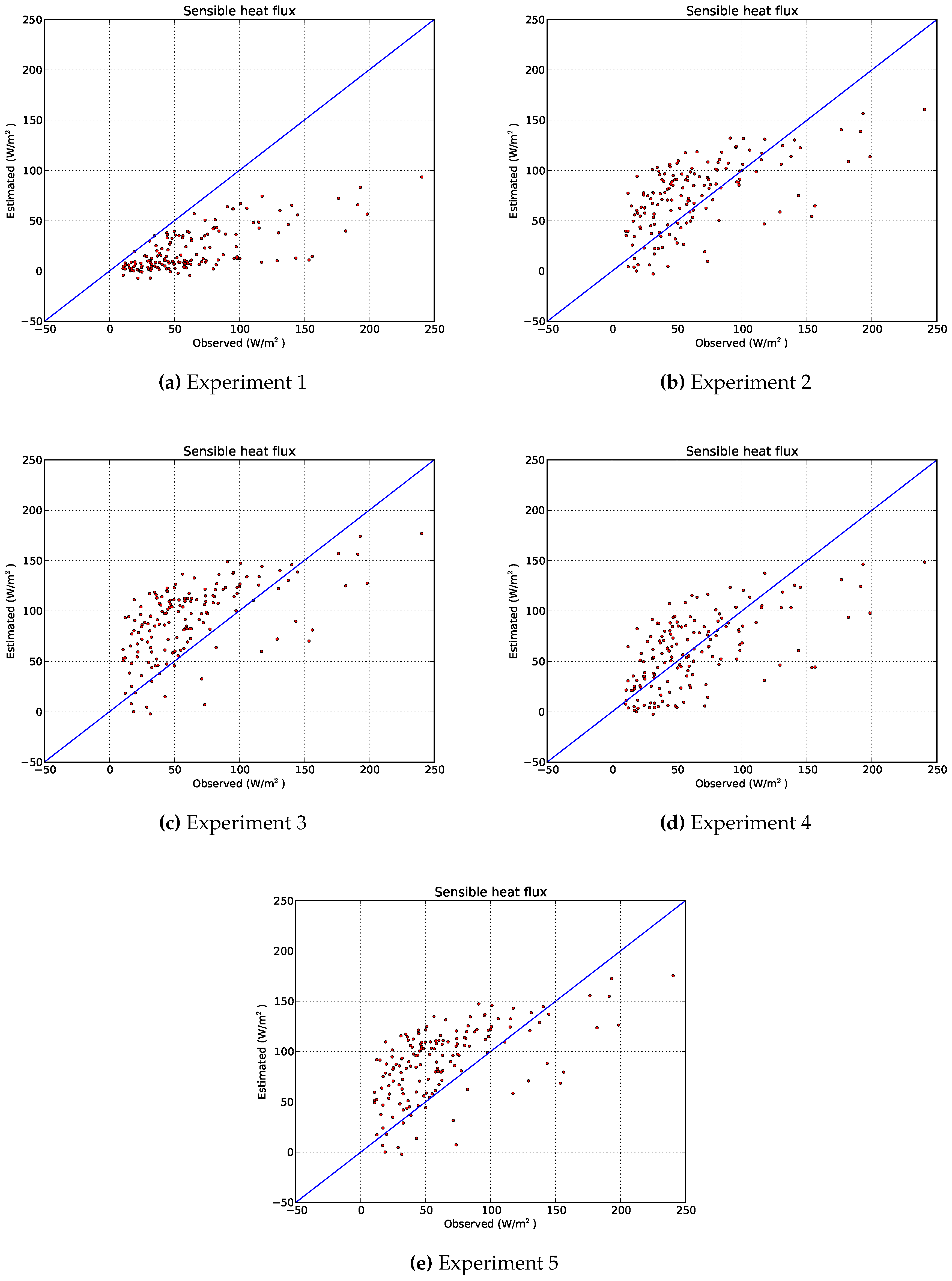
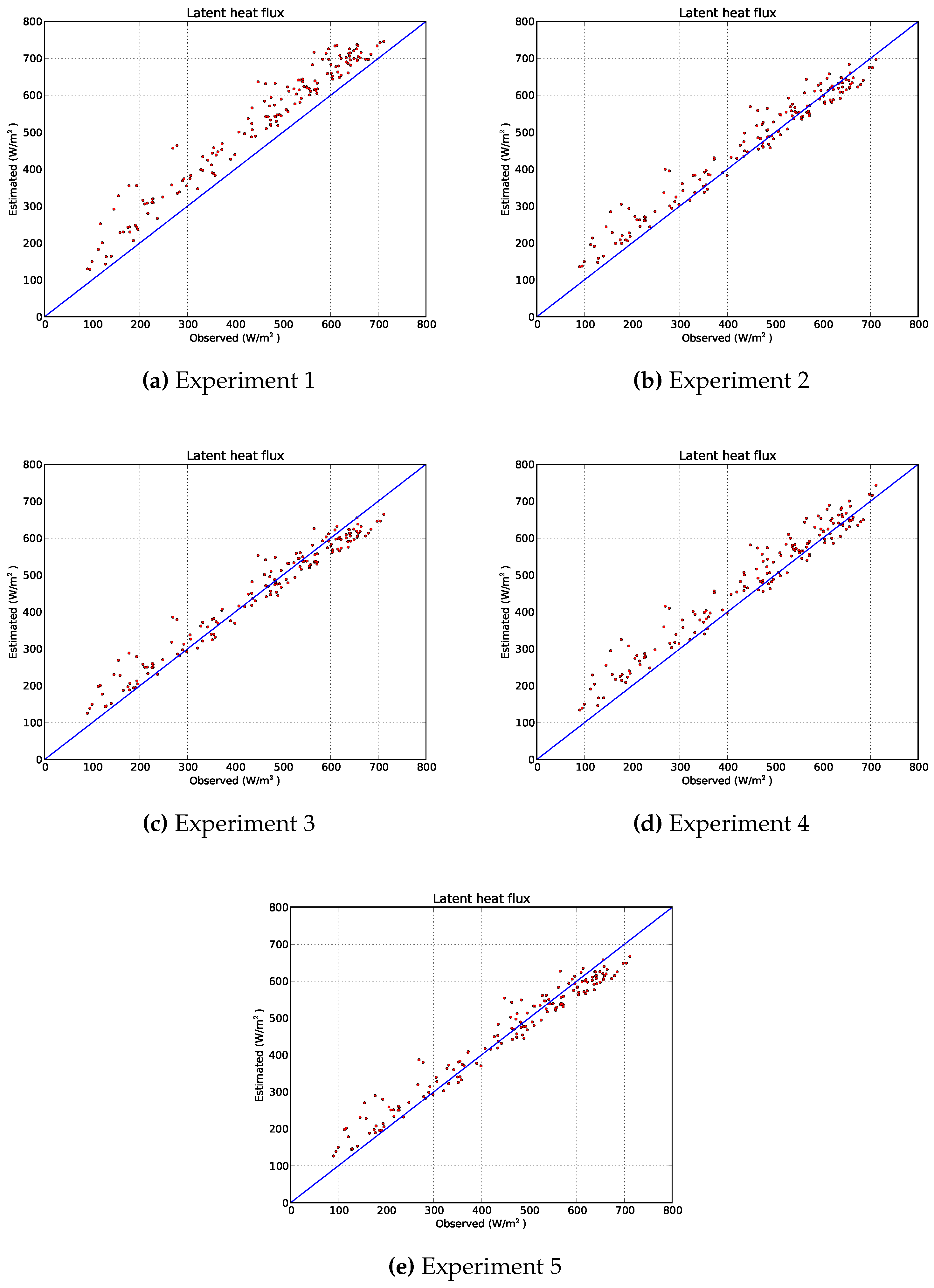
5. Spatial Evaluation of Estimated Turbulent Heat Flux Densities at the Footprint Scale
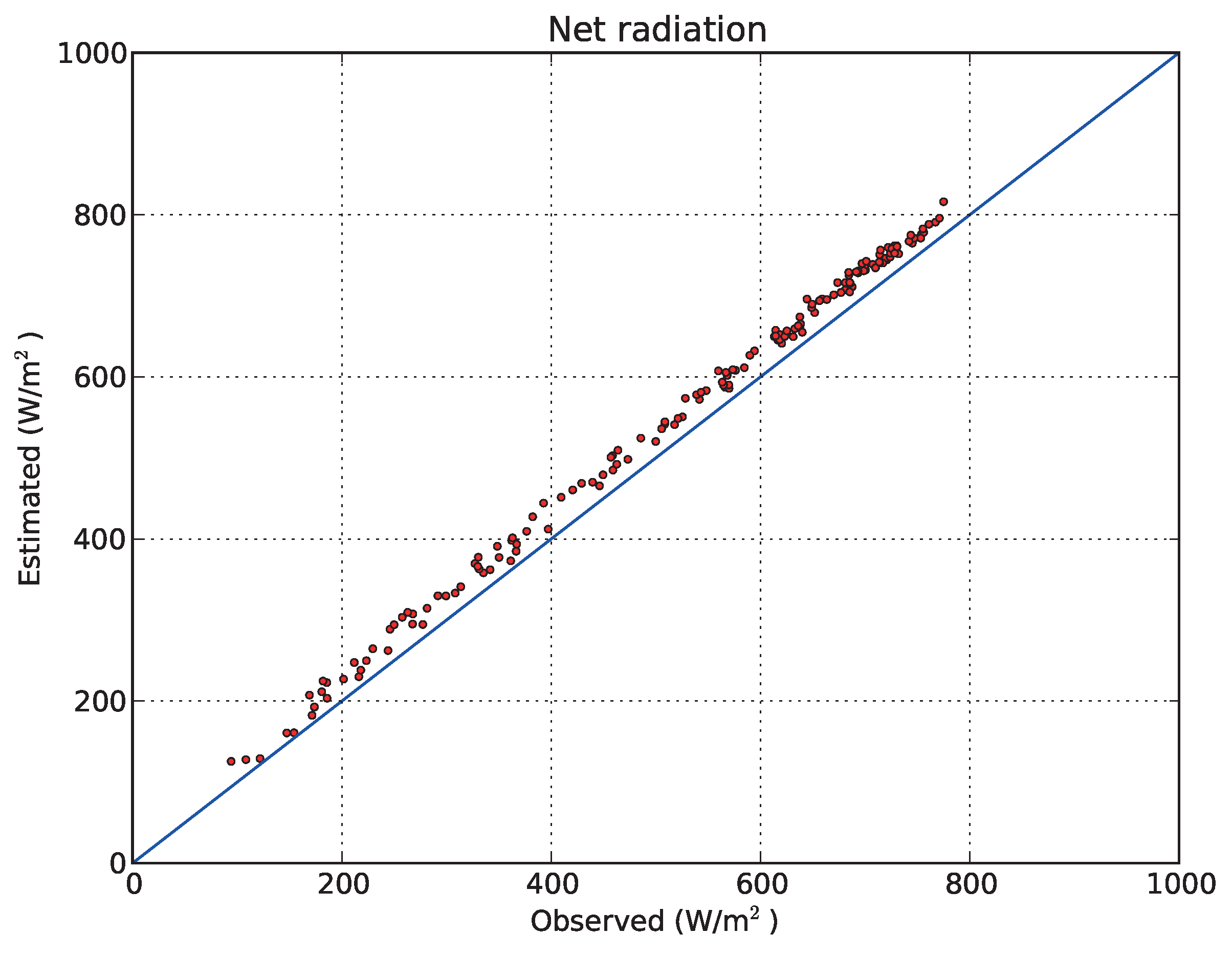
5.1. Surface Radiative Balance
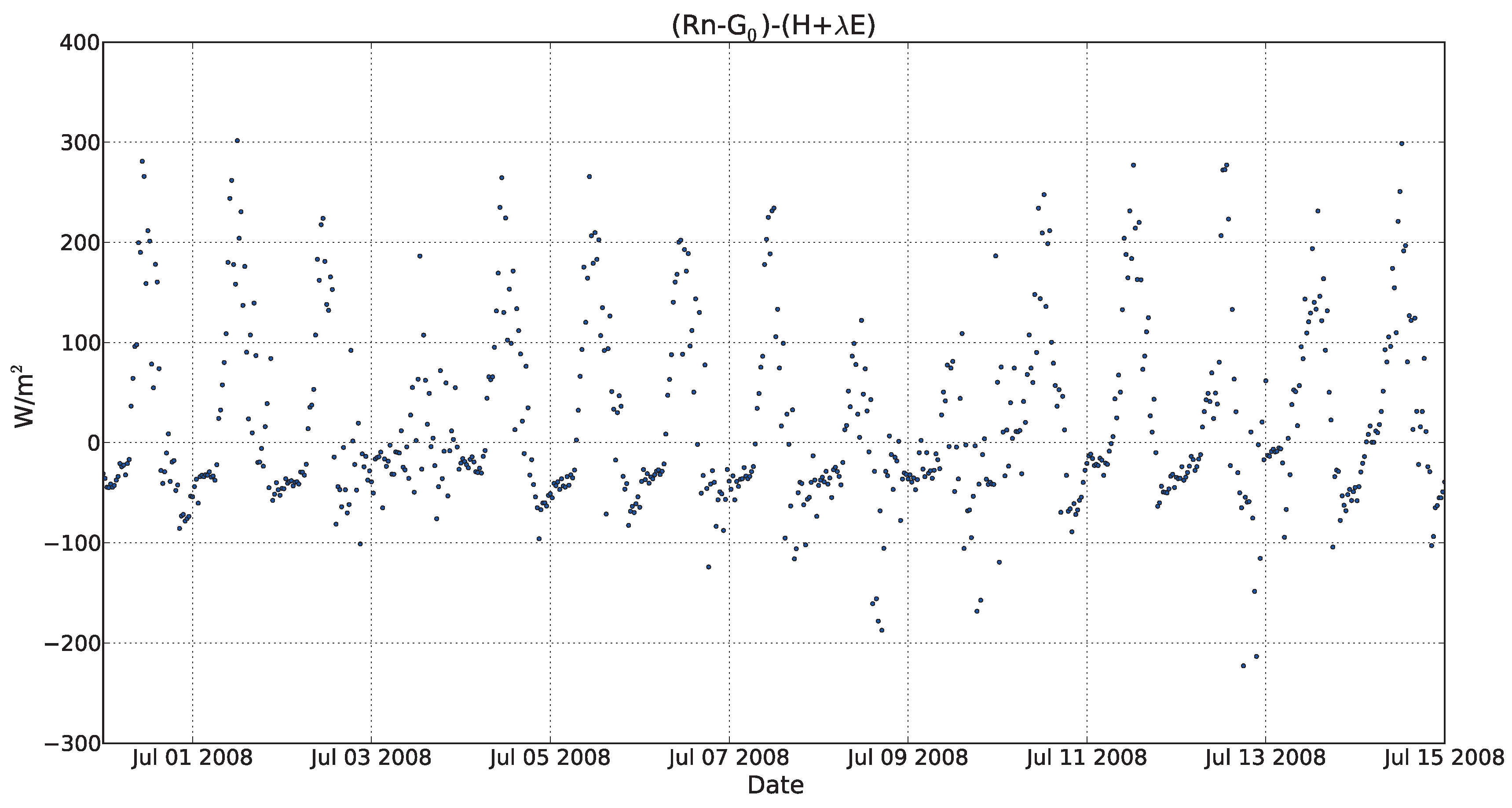
5.2. Surface Energy Balance
6. Temporal Evaluation of Estimated Turbulent Heat Flux Densities at the AMS Scale
6.1. Production of a Time-Series
6.2. Results
7. Discussion
8. Conclusions and Perspectives
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Li, Z.L.; Tang, R.; Wan, Z.; Bi, Y.; Zhou, C.; Tang, B.; Yan, G.; Zhang, X. A review of current methodologies for regional evapotranspiration estimation from remotely sensed data. Sensors 2009, 9, 3801–3853. [Google Scholar] [CrossRef] [PubMed]
- Menenti, M.; Choudhury, B.J. Parameterization of land surface evaporation by means of location dependent potential evaporation and surface temperature range. In Exchange Processes at the Land Surface for a Range of Space and Time Scales, Proceedgins of the Yokohama Symposium; IAHS Publication: Washington, DC, USA, 1993; pp. 561–568. [Google Scholar]
- Bastiaanssen, W.; Menenti, M.; Feddes, R.; Holtslag, A.A.M. A remote sensing surface energy balance algorithm for land (SEBAL). 1. Formulation. J. Hydrol. 1998, 212–213, 198–212. [Google Scholar] [CrossRef]
- Roerink, G.; Su, Z.; Menenti, M. S-SEBI: A simple remote sensing algorithm to estimate the surface energy balance. Phys. Chem. Earth 2000, 25, 147–157. [Google Scholar] [CrossRef]
- Su, Z. The Surface Energy Balance System (SEBS) for estimation of turbulent heat fluxes at scales ranging from a point to a continent. Hydrol. Earth Syst. Sci. 2002, 6, 85–99. [Google Scholar] [CrossRef]
- Jia, L.; Li, Z.L.; Menenti, M.; Su, Z.; Verhoef, W.; Wan, Z. A practical algorithm to infer soil and foliage component temperatures from bi-angular ATSR-2 data. Int. J. Remote Sens. 2003, 24, 4739–4760. [Google Scholar] [CrossRef]
- Colin, J. Apport de la télédétection optique à la définition d’indicateurs de performance pour l’utilisation de l’eau en agriculture. Ph.D. Thesis, Université Louis Pasteur, Strasbourg, France, 2006. [Google Scholar]
- Brutsaert, W. Aspects of bulk atmospheric boundary layer similarity under free-convective conditions. Rev. Geophys. 1999, 37, 439–451. [Google Scholar] [CrossRef]
- Massman, W.J. A model study of kBH-1 for vegetated surfaces using localized near-field’ Lagrangian theory. J. Hydrol. 1999, 223, 27–43. [Google Scholar] [CrossRef]
- Arya, S.P.S. A drag partition theory for determining the large-scale roughness parameter and wind stress on the Arctic pack ice. J. Geophys. Res. 1975, 80, 3447–3454. [Google Scholar] [CrossRef]
- Andreas, E.L. A theory for the scalar roughness and the scalar transfer coefficients over snow and sea ice. Bound.-Layer Meteorol. 1987, 38, 159–184. [Google Scholar] [CrossRef]
- Oke, T. Boundary Layer Climates; Routledge Press: New York, NY, USA, 1987. [Google Scholar]
- Stull, R. An Introduction to Boundary Layer Meteorology; Kluwer Academic: Dordrecht, The Netherlands, 1999. [Google Scholar]
- Garrat, J. The Atmospheric Boundary Layer; Cambridge University Press: Cambridge, UK, 1992; p. 316. [Google Scholar]
- Brock, B.W.; Willis, I.C.; Shaw, M.J. Measurements and parameterization of aerodynamic roughness length variations at Haut Glacier d’Arolla, Switzerland. J. Glaciol. 2006, 52, 281–297. [Google Scholar] [CrossRef]
- Andreas, E.L. Parameterizing scalar transfer over snow and ice: A review. J. Hydrometeorol. 2002, 3, 417–432. [Google Scholar] [CrossRef]
- Menenti, M.; Ritchie, J.C. Estimation of effective aerodynamic roughness of Walnet Gulch watershed with laser altimeter measurements. Water Ressour. Res. 1994, 30, 1329–1337. [Google Scholar] [CrossRef]
- Su, Z.; Schmugge, T.; Kustas, W.P.; Massman, W.J. An evaluation of two models for estimation of the roughness height for heat transfer between the land surface and the atmosphere. J. Appl. Meteorol. 2001, 40, 1933–1951. [Google Scholar] [CrossRef]
- De Vries, A.C.; Kustas, W.P.; Ritchie, J.C.; Klaassen, W.; Menenti, M.; Rango, A.; Prueger, J.H. Effective aerodynamic roughness estimated from airborne laser altimeter measurements of surface features. Int. J. Remote Sens. 2003, 24, 1545–1558. [Google Scholar] [CrossRef]
- Moran, M.S. A Satellite-Based Approach for Evaluation of the Spatial Distribution of Evapotranspiration from Agricultural Lands. Ph.D. Thesis, University of Arizona, Tucson, AZ, USA, 1990. [Google Scholar]
- Bastiaanssen, W. Regionalization of Surface Flux Densities and Moisture Indicators Incomposite Terrain: A Remote Sensing Approach under Clear Skies in Mediterranean Climates. Ph.D. Thesis, Wageningen Agricultural University, Wageningen, The Netherlands, 1995. [Google Scholar]
- Colin, J.; Menenti, M.; Rubio, E.; Jochum, A. Accuracy vs. operability: A case study over barrax in the context of the idots. In Proceedings of the AIP Conference Proceedings, Naples, Italy, 10–11 November 2005; Volume 852, pp. 75–83.
- Ketchum, R.D., Jr. Airborne laser profiling of the arctic pack ice. Remote Sens. Environ. 1971, 2, 41–52. [Google Scholar] [CrossRef]
- Hofton, M.A.; Rocchio, L.; Blair, J.; Dubayah, R. Validation of vegetation canopy LIDAR sub-canopy topography measurements for a dense tropical forest. J. Geodyn. 2002, 34, 491–502. [Google Scholar] [CrossRef]
- Dorren, L.; Berger, F.; Maier, B. Mapping the structure of forestal vegetation with an airborne light detection and ranging (LIDAR) system in mountainous terrain [Cartographier la structure de la vegetation forestiere avec un systeme LiDAR aeroporte en terrain montagnard]. Rev. Fr. Photogramm. Teledetec. 2007, 186, 54–59. [Google Scholar]
- Wang, C.; Menenti, M.; Stoll, M.P.; Feola, A.; Belluco, E.; Marani, M. Separation of ground and low vegetation signatures in LIDAR measurements of salt-marsh environments. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2014–2023. [Google Scholar] [CrossRef]
- Streutker, D.R.; Glenn, N. LIDAR measurement of sagebrush steppe vegetation heights. Remote Sens. Environ. 2006, 102, 135–145. [Google Scholar] [CrossRef]
- Colin, J.; Faivre, R. Aerodynamic roughness length estimation from very high-resolution imaging LIDAR observations over the Heihe basin in China. Hydrol. Earth Syst. Sci. 2010, 14, 2661–2669. [Google Scholar] [CrossRef]
- Raupach, M.R. Simplified expressions for vegetation roughness length and zero-plane displacement as functions of canopy height and area index. Bound.-Layer Meteorol. 1994, 71, 211–216. [Google Scholar] [CrossRef]
- MacDonald, R.W.; Griffiths, R.F.; Hall, D.J. An improved method for the estimation of surface roughness of obstacle arrays. Atmos. Environ. 1998, 32, 1857–1864. [Google Scholar] [CrossRef]
- Choudhury, B.J.; Idso, S.B.; Reginato, R.J. Analysis of an empirical model for soil heat flux under a growing wheat crop for estimating evaporation by an infrared-temperature based energy balance equation. Agric. For. Meteorol. 1987, 39, 283–297. [Google Scholar] [CrossRef]
- Bastiaanssen, W.; Bandara, K. Evaporative depletion assessments for irrigated watersheds in Sri Lanka. Irrig. Sci. 2001, 21, 1–15. [Google Scholar]
- Murray, T.; Verhoef, A. Moving towards a more mechanistic approach in the determination of soil heat flux from remote measurements. A universal approach to calculate thermal inertia. Agric. For. Meteorol. 2007, 147, 80–87. [Google Scholar] [CrossRef]
- Monteith, J.L.; Unsworth, M.H. Principles of Environmental Physics; Edward Arnold Press: London, UK, 1973. [Google Scholar]
- Kustas, W.P.; Daughtry, C.S.T. Estimation of the soil heat flux/net radiation ratio from spectral data. Agric. For. Meteorol. 1989, 49, 205–223. [Google Scholar] [CrossRef]
- Chamberlain, A.C. Transport of gases to and from grass and grass-like surfaces. Proc. R. Soc. Lond. 1966, A290, 236–265. [Google Scholar] [CrossRef]
- Owen, P.R.; Thomson, W.R. Heat transfer across rough surfaces. J. Fluid Mech. 1968, 15, 321–324. [Google Scholar] [CrossRef]
- Brutsaert, W. Evaporation Into the Atmosphere; Kluwer Academic: Dordrecht, The Netherlands, 1982. [Google Scholar]
- Counehan, J. Wind tunnel determination of the roughness length as a function of the fetch and the roughness density of three-dimensional roughness elements. Atmos. Environ. (1967) 1971, 5, 637–642. [Google Scholar] [CrossRef]
- Wooding, R.A.; Bradley, E.; Marshall, J. Drag due to regular arrays of roughness elements of varying geometry. Bound.-Layer Meteorol. 1973, 5, 285–308. [Google Scholar] [CrossRef]
- Lettau, H. Note on aerodynamic roughness-parameter estimation on the basis of roughness-element description. J. Appl. Meteorol. 1969, 8, 828–832. [Google Scholar] [CrossRef]
- Theurer, W. Dispersion of Ground-Level Emissions in Complex Built-Up Areas. Ph.D. Thesis, Department of Architecture, University of Karlsruhe, Karlsruhe, Germany, 1993. [Google Scholar]
- Lopes, A.M.G. Windstation—A software for the simulation of atmospheric flows over complex topography. Environ. Model. Softw. 2003, 18, 81–96. [Google Scholar] [CrossRef]
- Li, X.; Li, X.I.; Li, Z.; Ma, M.; Wang, J.; Xiao, Q.; Liu, Q.; Che, T.; Chen, E.; Yan, G.; et al. Watershed allied telemetry experimental research. J. Geophys. Res. D Atmos. 2009, 114. [Google Scholar] [CrossRef]
- Li, F.; Qiang, L.; Qing, X.; Qinhuo, L.; Zhigang, L. Design and Implementation of Airborne Wide-Angle Infrared Dual-mode Line/area Array Scanner in Heihe Experiment. Adv. Earth Sci. 2009, 24, 696–705. [Google Scholar]
- Schuepp, P.; Leclerc, M.; Macpherson, J. Footprint prediction of scalar fluxes from analytical solutions of the diffusion equation. Bound.-Layer Meteorol. 1990, 50, 353–373. [Google Scholar] [CrossRef]
- Colin, J.; Roupioz, L.; Ghafarian, H.; Bai, J.; Jia, L.; Liu, S.; Faivre, R.; Nerry, F.; Menenti, M. Surface Radiative and Energy Balance Time-Series Processing and Validation Procedure Document; Technical Report, CEOP-AEGIS Deliverable Report De3.3; University of Strasbourg: Strasbourg, France, 2011; p. 34. [Google Scholar]
- Su, Z. Remote Sensing Applied to Hydrology: The Sauer River Basin Study. Ph.D. Thesis, Wageningen University and Research, Wageningen, The Netherlands, 1996. [Google Scholar]
- Zheng, G.; Moskal, M. Retrieving Leaf Area Index (LAI) using remote sensing: Theories, methods and sensors. Sensors 2009, 9, 2719–2745. [Google Scholar] [CrossRef] [PubMed]
- Carlson, T.N.; Ripley, D.A. On the relation between NDVI, fractional vegetation cover, and leaf area index. Remote Sens. Environ. 1997, 62, 241–252. [Google Scholar] [CrossRef]
- Baret, F.; Clevers, J.; Steven, M. The robustness of canopy gap fraction estimates from red and near-infrared reflectances: A comparison of approaches. Remote Sens. Environ. 1995, 54, 141–151. [Google Scholar] [CrossRef]
- Wittich, K.P.; Hansing, O. Area-averaged vegetative cover fraction estimated from satellite data. Int. J. Biometeorol. 1995, 38, 209–215. [Google Scholar] [CrossRef]
- De Griend, A.A.V.; Owe, M. On the relationship between thermal emissivity and the normalized difference vegetation index for natural surfaces. Int. J. Remote Sens. 1993, 14, 1119–1131. [Google Scholar] [CrossRef]
- Menenti, M.; Ritchie, J.C.; Humes, K.S.; Parry, R.; Pachepsky, Y.; Gimenez, D.; Leguizamon, S. Estimation of aerodynamic roughness at various spatial scales. John Wiley & Sons: Chichester, UK, 1996. [Google Scholar]
- Taylor, P.A.; Sykes, R.I.; Mason, P.J. On the parameterization of drag over small-scale topography in neutrally-stratified boundary-layer flow. Bound.-Layer Meteorol. 1989, 48, 409–422. [Google Scholar] [CrossRef]
- Twine, T.E.; Kustas, W.P.; Norman, J.M.; Cook, D.R.; Houser, P.R.; Meyers, T.P.; Prueger, J.H.; Starks, P.J.; Wesley, M.L. Correcting eddy-covariance flux underestimates over a grassland. Agric. For. Meteorol. 2000, 103, 279–300. [Google Scholar] [CrossRef]
- Wieringa, J. How far can agrometeorological station observations be considered representative? In Proceedings of the 23rd Conference on Agriculture and Forest Meteorology, Boston, MA, USA, 2–6 November 1998.
- Wieringa, J.; Davenport, A.G.; Grimmond, C.S.B.; Oke, T.R. New revision of Davenport roughness classification. In Proceedings of the 3rd European and African Conference on Wind Engineering, Eindovhen, The Netherlands, 2–6 July 2001.
- Covey, W. A Method for the Computation of Logarithmic Wind Profile Parameters and Their Standard Errors; Chapter The Energy Budget at the Surface, Part II, Report No. 72; USDA-ARS: Washington, DC, USA, 1963; pp. 28–33.
- Kustas, W.P.; Choudhury, B.J.; Kunkel, K.E.; Gay, L.W. Estimate of the aerodynamic roughness parameters over an incomplete canopy cover of cotton. Agric. For. Meteorol. 1989, 46, 91–105. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| METHODS | |||||
|---|---|---|---|---|---|
| Experiment No. | NDVI | LIDAR | M&R | CFD | Raupach |
| -- | |||||
| -- | |||||
| - | |||||
| - | |||||
| - | |||||
| Variables | Measured | Estimated |
|---|---|---|
| (W/m) | 637.4 | 699.4 |
| (W/m) | 9.0 | 107.5 |
| (W/m) | 628.4 | 591.9 |
| (C) | 26.5 | 25.4 |
| Variables | Measured | Corrected | Variation |
|---|---|---|---|
| (W/m) | 340.1 | 556.1 | +216.0 |
| H (W/m) | 44.2 | 72.3 | +28.1 |
| Λ (-) | 0.88 | 0.88 |
| Experiment No. | H | Λ | ||||
|---|---|---|---|---|---|---|
| (W/m) | (W/m) | (-) | (m) | (-) | (m) | |
| 1. | 589.9 | 18.1 | 0.97 | 0.288 | 3.85 | 0.0058 |
| 2. | 512.0 | 79.7 | 0.87 | 0.014 | 3.59 | 0.0004 |
| 3. | 467.7 | 124.1 | 0.79 | 0.017 | 3.49 | 0.0001 |
| 4. | 523.7 | 67.8 | 0.89 | 0.026 | 6.15 | 0.0005 |
| 5. | 500.7 | 91.2 | 0.85 | 0.008 | 3.99 | 0.0001 |
| Experiment No. | H | Λ | ||||
|---|---|---|---|---|---|---|
| (W/m) | (W/m) | (-) | (m) | (-) | (m) | |
| 3. | 466.6 | 123.7 | 0.79 | 0.017 | 3.39 | 0.0001 |
| 4. | 532.2 | 58.6 | 0.90 | 0.026 | 3.66 | 0.0007 |
| 5. | 502.3 | 89.6 | 0.85 | 0.008 | 3.56 | 0.0003 |
| Experiment No. | (W/m) | H (W/m) | Λ (-) | (m) |
|---|---|---|---|---|
| 1. | 76.2 | 47.1 | 0.114 | 0.2535 |
| 2. | 35.7 | 33.9 | 0.076 | 0.0128 |
| 3. | 33.7 | 45.0 | 0.084 | 0.0027 |
| 4. | 44.8 | 30.3 | 0.081 | - |
| 5. | 33.5 | 43.9 | 0.084 | 0.0032 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Faivre, R.; Colin, J.; Menenti, M. Evaluation of Methods for Aerodynamic Roughness Length Retrieval from Very High-Resolution Imaging LIDAR Observations over the Heihe Basin in China. Remote Sens. 2017, 9, 63. https://0-doi-org.brum.beds.ac.uk/10.3390/rs9010063
Faivre R, Colin J, Menenti M. Evaluation of Methods for Aerodynamic Roughness Length Retrieval from Very High-Resolution Imaging LIDAR Observations over the Heihe Basin in China. Remote Sensing. 2017; 9(1):63. https://0-doi-org.brum.beds.ac.uk/10.3390/rs9010063
Chicago/Turabian StyleFaivre, Robin, Jérôme Colin, and Massimo Menenti. 2017. "Evaluation of Methods for Aerodynamic Roughness Length Retrieval from Very High-Resolution Imaging LIDAR Observations over the Heihe Basin in China" Remote Sensing 9, no. 1: 63. https://0-doi-org.brum.beds.ac.uk/10.3390/rs9010063