
Extrapolating Forest Canopy Fuel Properties in the California Rim Fire by Combining Airborne LiDAR and Landsat OLI Data

 , ,
, , 
Abstract
:
1. Introduction
2. Materials and Methods
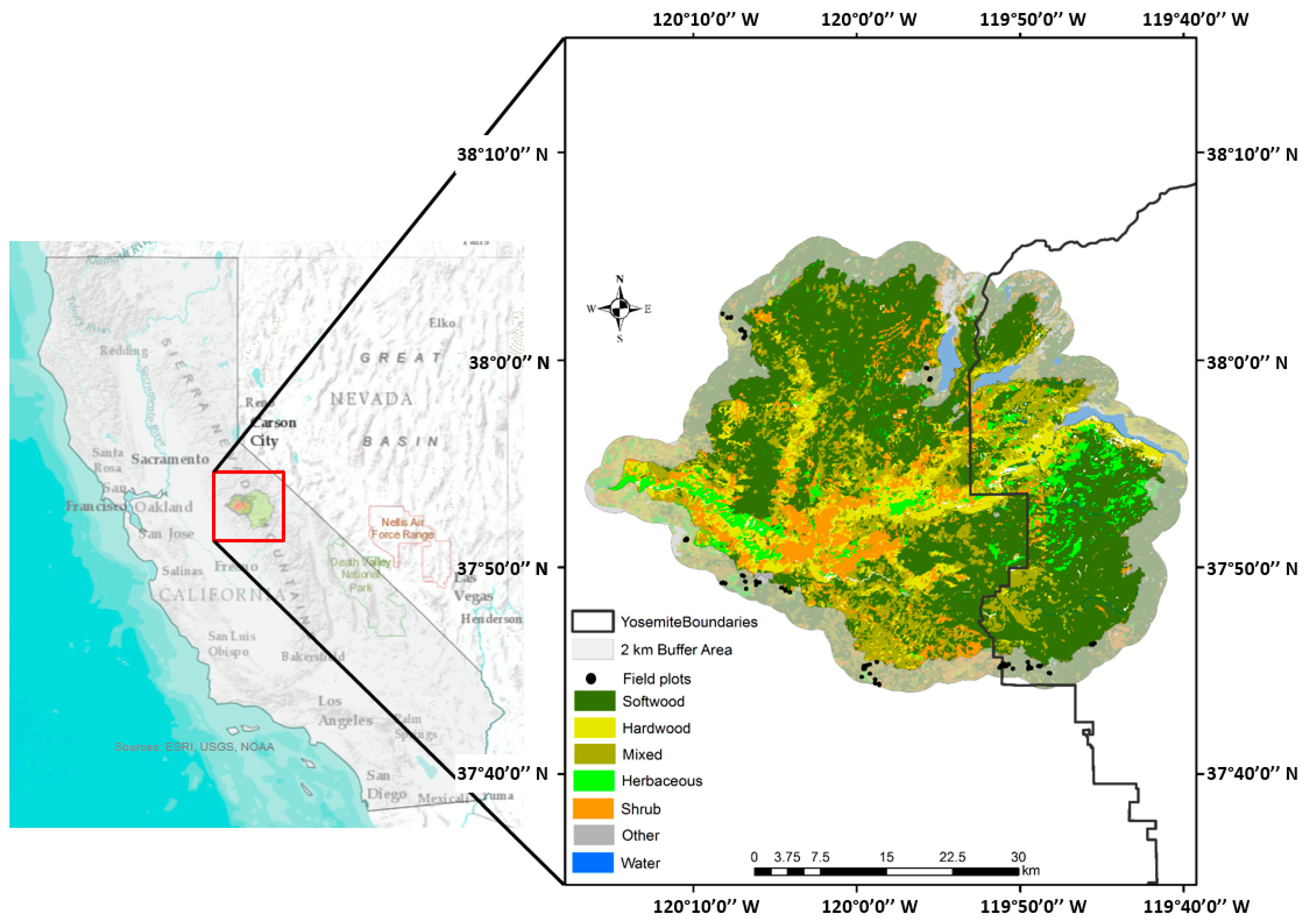
2.1. Study Area
2.2. Field Data
2.3. LiDAR Data and Processing
2.4. Landsat Data and Processing
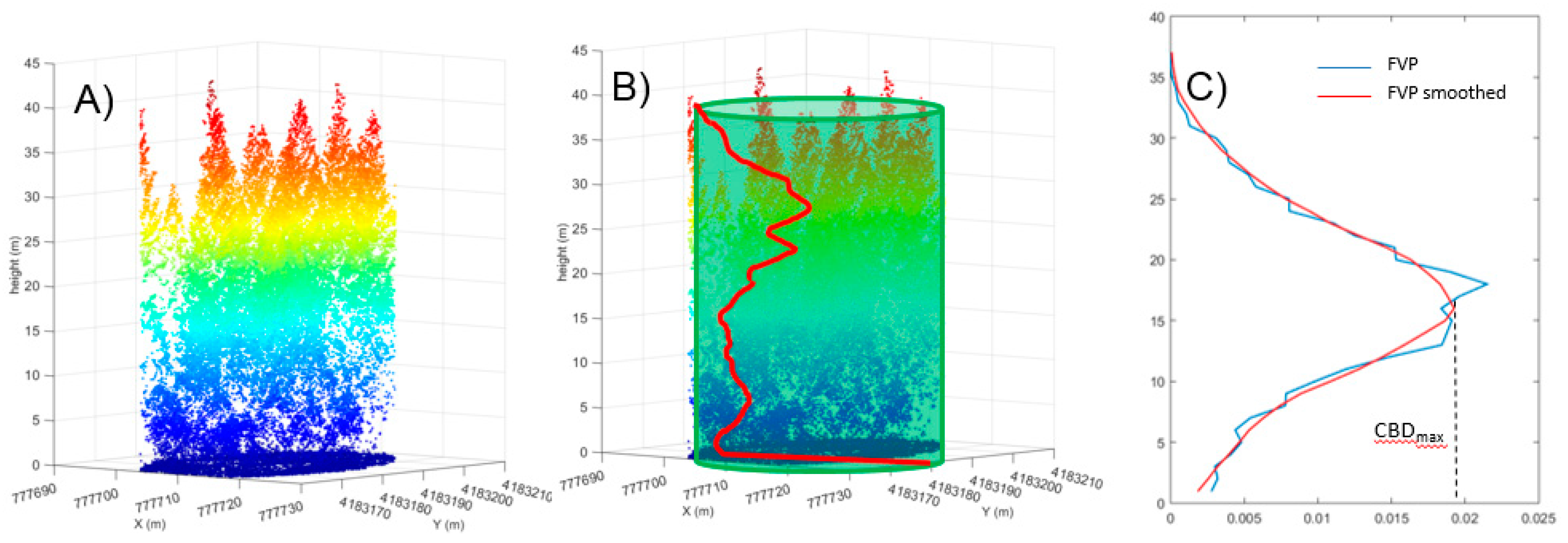
2.5. Canopy Fuel Properties Estimation from LiDAR Data
2.6. Canopy Fuel Properties Extrapolation Using Landsat Data
2.7. Model Performance and Error Assessment
3. Results
3.1. Estimation of Canopy Fuel Properties from LiDAR Data
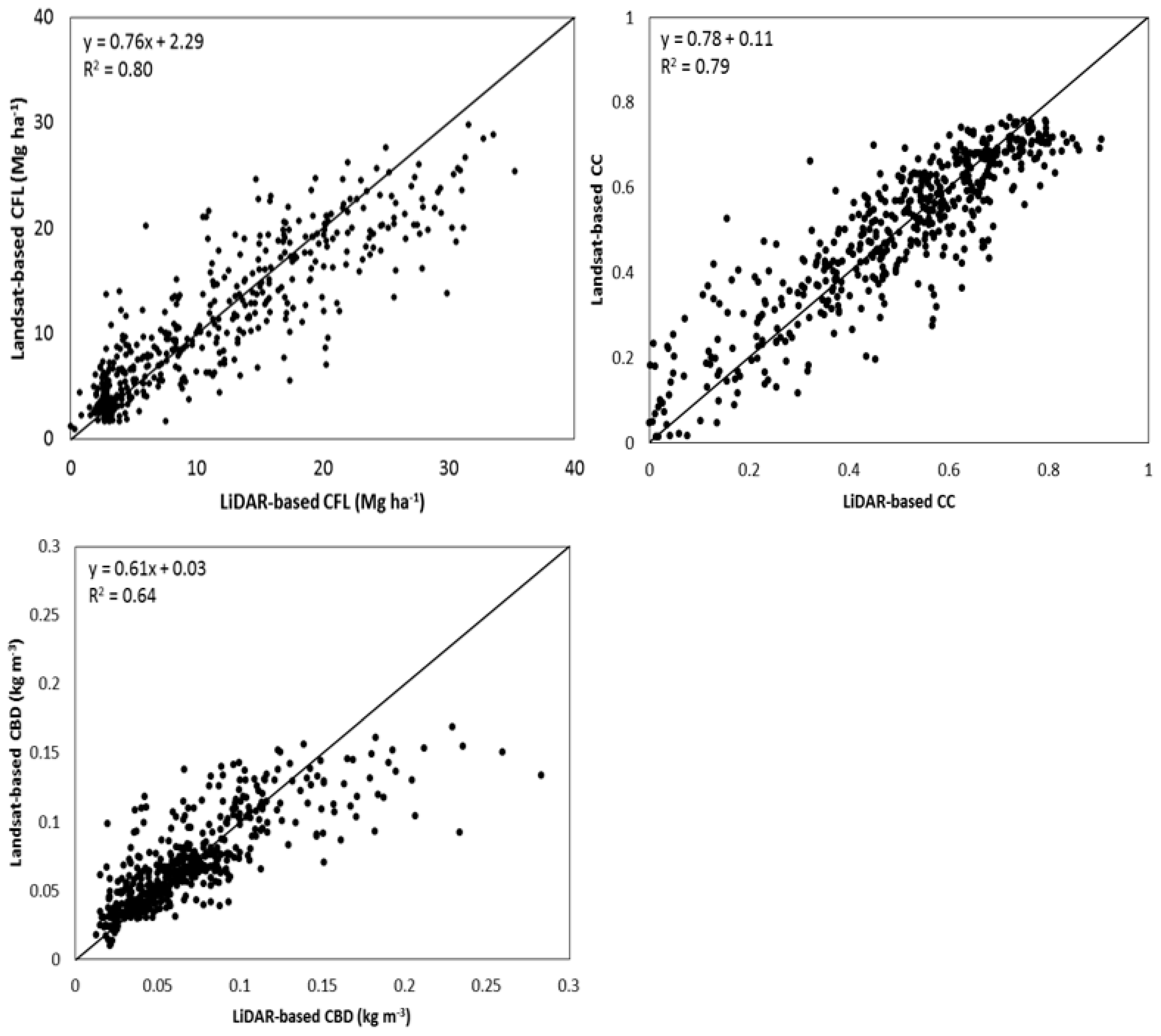
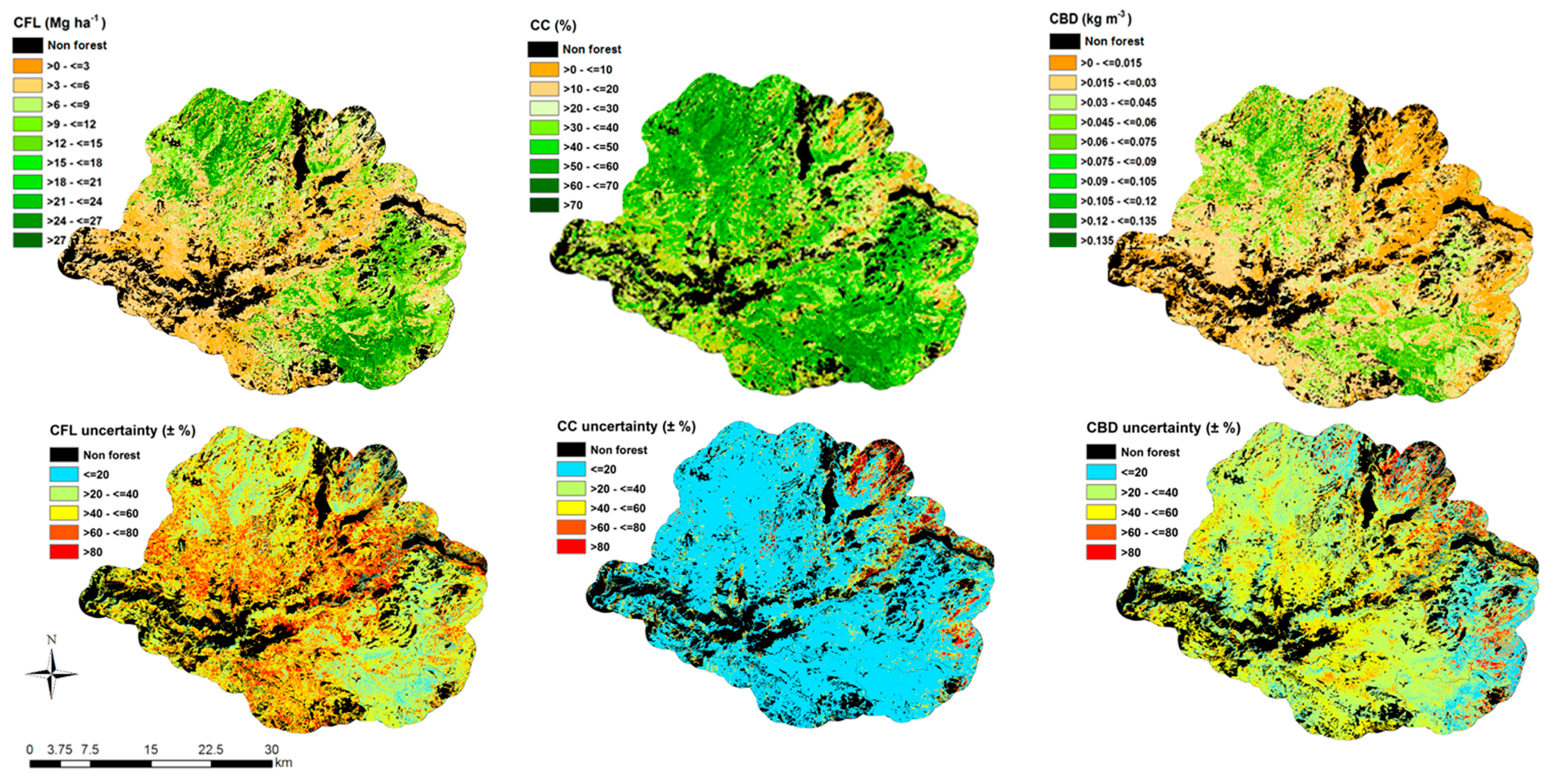
3.2. Canopy Fuel Properties Estimation from Landsat Data
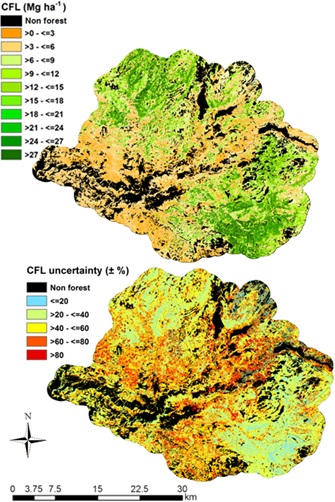
3.3. Uncertainties of the Estimates
3.4. Relation between Canopy Fuel Properties and Burn Severity
4. Discussion
4.1. Canopy Fuel Properties Estimation from LiDAR Data
4.2. Canopy Fuel Properties Estimation from Landsat Data
4.3. Uncertainty Analyses
4.4. Relation between Canopy Fuel Properties and Burn Severity
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Keane, R.E.; Burgan, R.; van Wagtendonk, J. Mapping wildland fuels for fire management across multiple scales: Integrating remote sensing, GIS, and biophysical modeling. Int. J. Wildland Fire 2001, 10, 301–319. [Google Scholar] [CrossRef]
- Stephens, S.; Agee, J.K.; Fulé, P.; North, M.; Romme, W.; Swetnam, T.; Turner, M.G. Managing Forests and Fire in Changing Climates. Science 2013, 342, 41–42. [Google Scholar] [CrossRef] [PubMed]
- Williams, J.; Albright, D.; Hoffmann, A.A.; Eritsov, A.; Moore, P.F.; Mendes de Morais, J.C.; Leonard, M.; Miguel-Ayanz, J.S.; Xanthopoulos, G.; van Lierop, P. Findings and Implications from a Coarse-Scale Global Assessment of Recent Selected Mega-Fires. In Proceedings of the 5th International Wildland Fire Conference, Sun City, South Africa, 9–13 May 2011. [Google Scholar]
- Attiwill, P.; Binkley, D. Exploring the mega-fire reality: A “Forest Ecology and Management” conference. For. Ecol. Manag. 2013, 294, 1–3. [Google Scholar] [CrossRef]
- Scott, J.H.; Reinhardt, E.D. Assessing Crown Fire Potential by Linking Models of Surface and Crown Fire Behavior; Research Paper RMRS-RP-29; USDA Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2001. [Google Scholar]
- Cruz, M.G.; Alexander, M.E.; Wakimoto, R.H. Assessing canopy fuel stratum characteristics in crown fire prone fuel types of western North America. Int. J. Wildland Fire 2003, 12, 39–50. [Google Scholar] [CrossRef]
- Keane, R.E.; Reinhardt, E.D.; Scott, J.; Gray, K.; Reardon, J. Estimating forest canopy bulk density using six indirect methods. Can. J. For. Res. 2005, 35, 724–739. [Google Scholar] [CrossRef]
- Riaño, D.; Meier, E.; Allgöwer, B.; Chuvieco, E.; Ustin, S.L. Modeling airborne laser scanning data for the spatial generation of critical forest parameters in fire behavior modeling. Remote Sens. Environ. 2003, 86, 177–186. [Google Scholar] [CrossRef]
- Van Wagner, C.E. Conditions for the start and spread of crown fire. Can. J. For. Res. 1977, 7, 23–34. [Google Scholar] [CrossRef]
- García, M.; Danson, F.M.; Riano, D.; Chuvieco, E.; Ramirez, F.A.; Bandugula, V. Terrestrial laser scanning to estimate plot-level forest canopy fuel properties. Int. J. Appl. Earth Obs. Geoinform. 2011, 13, 636–645. [Google Scholar] [CrossRef]
- García, M.; Popescu, S.; Riaño, D.; Zhao, K.; Neuenschwander, A.; Agca, M.; Chuvieco, E. Characterization of canopy fuels using ICESat/GLAS data. Remote Sens. Environ. 2012, 123, 81–89. [Google Scholar] [CrossRef]
- Riano, D.; Chuvieco, E.; Condés, S.; González-Matesanz, J.; Ustin, S.L. Generation of crown bulk density for Pinus sylvestris L. from lidar. Remote Sens. Environ. 2004, 92, 345–352. [Google Scholar] [CrossRef]
- Skowronski, N.S.; Clark, K.L.; Duveneck, M.; Hom, J. Three-dimensional canopy fuel loading predicted using upward and downward sensing LiDAR systems. Remote Sens. Environ. 2011, 115, 703–714. [Google Scholar] [CrossRef]
- Hopkinson, C.; Chasmer, L. Testing LiDAR models of fractional cover across multiple forest ecozones. Remote Sens. Environ. 2009, 113, 275–288. [Google Scholar] [CrossRef]
- Morsdorf, F.; Kötz, B.; Meier, E.; Itten, K.I.; Allgöwer, B. Estimation of LAI and fractional cover from small footprint airborne laser scanning data based on gap fraction. Remote Sens. Environ. 2006, 104, 50–61. [Google Scholar] [CrossRef]
- Andersen, H.E.; McGaughey, R.J.; Reutebuch, S.E. Estimating forest canopy fuel parameters using LIDAR data. Remote Sens. Environ. 2005, 94, 441–449. [Google Scholar] [CrossRef]
- Hall, S.A.; Burke, I.C.; Box, D.O.; Kaufmann, M.R.; Stoker, J.M. Estimating stand structure using discrete-return lidar: An example from low density, fire prone ponderosa pine forests. For. Ecol. Manag. 2005, 208, 189–209. [Google Scholar] [CrossRef]
- Gajardo, J.; García, M.; Riaño, D. Applications of Airborne Laser Scanning in forest fuel assessment and fire prevention. In Forestry Applications of Airborne Laser Scanning Concepts and Case Studies; Maltamo, M., Naesset, E., Vauhkonen, J., Eds.; Springer: Dordrecht, The Netherlands, 2014. [Google Scholar]
- Gwenzi, D.; Lefsky, M.A.; Suchdeo, V.P.; Harding, D.J. Prospects of the ICESat-2 laser altimetry mission for savanna ecosystem structural studies based on airborne simulation data. ISPRS J. Photogramm. Remote Sens. 2016, 118, 68–82. [Google Scholar] [CrossRef]
- Dubayah, R.; Goetz, S.J.; Blair, J.B.; Fatoyinbo, T.E.; Hansen, M.; Healey, S.P.; Hofton, M.A.; Hurtt, G.C.; Kellner, J.; Luthcke, S.B.; et al. The Global Ecosystem Dynamics Investigation (GEDI) Lidar. AGU Fall Meet. Abstr. 2014, 1, 7. Available online: https://agu.confex.com/agu/fm14/meetingapp.cgi/Paper/26237 (accessed on 10 January 2017).
- Maselli, F.; Chiesi, M.; Montaghi, A.; Pranzini, E. Use of ETM+ images to extend stem volume estimates obtained from LiDAR data. ISPRS J. Photogramm. Remote Sens. 2011, 66, 662–671. [Google Scholar] [CrossRef]
- Saatchi, S.S.; Harris, N.L.; Brown, S.; Lefsky, M.; Mitchard, E.T.; Salas, W.; Zutta, B.R.; Buermann, W.; Lewis, S.L.; Hagen, S.; et al. Benchmark map of forest carbon stocks in tropical regions across three continents. Proc. Natl. Acad. Sci. USA 2011, 108, 9899–9904. [Google Scholar] [CrossRef] [PubMed]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Næsset, E.; Ørka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. Lidar sampling for large-area forest characterization: A review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef]
- Falkowski, M.J.; Gessler, P.E.; Morgan, P.; Hudak, A.T.; Smith, A.M. Characterizing and mapping forest fire fuels using ASTER imagery and gradient modeling. For. Ecol. Manag. 2005, 217, 129–146. [Google Scholar] [CrossRef]
- Palaiologou, P.; Kalabokidis, K.; Kyriakidis, P. Forest mapping by geoinformatics for landscape fire behaviour modelling in coastal forests, Greece. Int. J. Remote Sens. 2013, 34, 4466–4490. [Google Scholar] [CrossRef]
- Casas, Á.; García, M.; Siegel, R.B.; Koltunov, A.; Ramírez, C.; Ustin, S. Burned forest characterization at single-tree level with airborne laser scanning for assessing wildlife habitat. Remote Sens. Environ. 2016, 175, 231–241. [Google Scholar] [CrossRef]
- Wang, Y.F. National Biomass Estimator Library; Forest Management Service Center: Fort Collins, CO, USA, 2014. [Google Scholar]
- Keyser, C.E.; Dixon, G.E. Western Sierra Nevada (WS) Variant Overview Forest Vegetation Simulator; Forest Management Service Center: Fort Collins, CO, USA, 2012; p. 58. [Google Scholar]
- García, M.; Riaño, D.; Chuvieco, E.; Danson, F.M. Estimating biomass carbon stocks for a Mediterranean forest in Spain using height and intensity LiDAR data. Remote Sens. Environ. 2010, 114, 816–830. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Harding, D.; Cohen, W.B.; Parker, G.; Shugart, H.H. Surface Lidar Remote Sensing of Basal Area and Biomass in Deciduous Forests of Eastern Maryland, USA. Remote Sens. Environ. 1999, 67, 83–98. [Google Scholar] [CrossRef]
- Means, J.E.; Acker, S.A.; Harding, D.J.; Blair, J.B.; Lefsky, M.A.; Cohen, W.B.; Harmon, M.E.; McKee, W.A. Use of Large-Footprint Scanning Airborne Lidar To Estimate Forest Stand Characteristics in the Western Cascades of Oregon. Remote Sens. Environ. 1999, 67, 298–308. [Google Scholar] [CrossRef]
- Blair, J.B.; Hofton, M.A. Modeling laser altimeter return waveforms over complex vegetation using high-resolution elevation data. Geophys. Res. Lett. 1999, 26, 2509–2512. [Google Scholar] [CrossRef]
- Muss, J.D.; Mladenoff, D.J.; Townsend, P.A. A pseudo-waveform technique to assess forest structure using discrete lidar data. Remote Sens. Environ. 2011, 115, 824–835. [Google Scholar] [CrossRef]
- Drake, J.B.; Dubayah, R.O.; Knox, R.G.; Clark, D.B.; Blair, J.B. Sensitivity of large-footprint lidar to canopy structure and biomass in a neotropical rainforest. Remote Sens. Environ. 2002, 81, 378–392. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Cohen, W.B.; Acker, S.A.; Parker, G.G.; Spies, T.A.; Harding, D. Lidar Remote Sensing of the Canopy Structure and Biophysical Properties of Douglas-Fir Western Hemlock Forests. Remote Sens. Environ. 1999, 70, 339–361. [Google Scholar] [CrossRef]
- Bouvier, M.; Durrieu, S.; Fournier, R.A.; Renaud, J.P. Generalizing predictive models of forest inventory attributes using an area-based approach with airborne LiDAR data. Remote Sens. Environ. 2015, 156, 322–334. [Google Scholar] [CrossRef]
- Masek, J.G.; Vermote, E.F.; Saleous, N.E.; Wolfe, R.; Hall, F.G.; Huemmrich, K.F.; Gao, F.; Kutler, J.; Lim, T.K. A Landsat surface reflectance dataset for North America, 1990–2000. IEEE Geosci. Remote Sens. Lett. 2006, 3, 68–72. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Hunt, R.E.; Rock, B.N. Detection of changes in leaf water content using near- and middle-infrared reflectances. Remote Sens. Environ. 1989, 30, 43–54. [Google Scholar]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Stark, R.; Rundquist, D. Novel algorithms for remote estimation of vegetation fraction. Remote Sens. Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef]
- Kauth, R.J.; Thomas, G.S. The tasseled cap—A graphic description of the spectral temporal development of agricultural crops as seen by Landsat. Proceding of the Symposium on Machine Processing of Remotely Sensed Data, West Lafayette, IN, USA, 29 June–1 July 1976; pp. 47–51. [Google Scholar]
- Baig, M.H.A.; Zhang, L.; Shuai, T.; Tong, Q. Derivation of a tasselled cap transformation based on Landsat 8 at-satellite reflectance. Remote Sens. Lett. 2014, 5, 423–431. [Google Scholar] [CrossRef]
- Powell, S.L.; Cohen, W.B.; Healey, S.P.; Kennedy, R.E.; Moisen, G.G.; Pierce, K.B.; Ohmann, J.L. Quantification of live aboveground forest biomass dynamics with Landsat time-series and field inventory data: A comparison of empirical modeling approaches. Remote Sens. Environ. 2010, 114, 1053–1068. [Google Scholar] [CrossRef]
- Cohen, W.B.; Spies, T.A.; Fiorella, M. Estimating the age and structure of forests in a multi-ownership landscape of western Oregon, U.S.A. Int. J. Remote Sens. 1995, 16, 721–746. [Google Scholar] [CrossRef]
- Hansen, M.J.; Franklin, S.E.; Woudsma, C.; Peterson, M. Forest Structure Classification in the North Columbia Mountains Using the Landsat TM Tasseled Cap Wetness Component. Can. J. Remote Sens. 2001, 27, 20–32. [Google Scholar] [CrossRef]
- Pascual, C.; Garcia-Abril, A.; Cohen, W.B.; Martin-Fernandez, S. Relationship between LiDAR-derived forest canopy height and Landsat images. Int. J. Remote Sens. 2010, 31, 1261–1280. [Google Scholar] [CrossRef]
- Wulder, M.A.; Skakun, R.S.; Kurz, W.A.; White, J.C. Estimating time since forest harvest using segmented Landsat ETM+ imagery. Remote Sens. Environ. 2004, 93, 179–187. [Google Scholar] [CrossRef]
- Pflugmacher, D.; Cohen, W.B.; Kennedy, R.E.; Yang, Z. Using Landsat-derived disturbance and recovery history and lidar to map forest biomass dynamics. Remote Sens. Environ. 2014, 151, 124–137. [Google Scholar] [CrossRef]
- De Brabanter, K.; Karsmakers, P.; Ojeda, F.; Alzate, C.; de Brabanter, J.; Pelckmans, K.; de Moor, B.; Vandewalle, J.; Suykens, J.A.K. LS-SVMlab Toolbox User’s Guide Version 1.8; Katholieke Universiteit Leuven: Leuven, Belgium, 2011; Available online: http://www.esat.kuleuven.be/sista/lssvmlab/downloads/tutorialv1_8.pdf (accessed on 10 March 2017).
- Matlab. The Mathworks Inc.: Natick, MA, USA, 2010. Available online: https://uk.mathworks.com/products/matlab.html (accessed on 10 March 2017).
- Weston, J.; Mukherjee, S.; Chapelle, O.; Pontil, M.; Poggio, T.; Vapnik, V. Feature selection for SVMS. Adv. Neural Inf. Process. Syst. 2000, 13, 668–674. [Google Scholar]
- Garcia, M.; Saatchi, S.; Casas, A.; Koltunov, A.; Ustin, S.; Ramirez, C.; Garcia-Gutierrez, J.; Balzter, H. Quantifying biomass consumption and carbon release from the California Rim fire by integrating airborne LiDAR and Landsat OLI data. J. Geophys. Res. Biogeosci. 2017, 122, 340–353. [Google Scholar] [CrossRef] [PubMed]
- Fieber, K.D.; Davenport, I.J.; Tanase, M.A.; Ferryman, J.M.; Gurney, R.J.; Becerra, V.M.; Walker, J.P.; Hacker, J.M. Validation of Canopy Height Profile methodology for small-footprint full-waveform airborne LiDAR data in a discontinuous canopy environment. ISPRS J. Photogramm. Remote Sens. 2015, 104, 144–157. [Google Scholar] [CrossRef]
- Harding, D.J.; Lefsky, M.A.; Parker, G.G.; Blair, J.B. Laser altimeter canopy height profiles: Methods and validation for closed-canopy, broadleaf forests. Remote Sens. Environ. 2001, 76, 283–297. [Google Scholar] [CrossRef]
- McRoberts, R.E.; Magnussen, S.; Tomppo, E.O.; Chirici, G. Parametric, bootstrap, and jackknife variance estimators for the k-Nearest Neighbors technique with illustrations using forest inventory and satellite image data. Remote Sens. Environ. 2011, 115, 3165–3174. [Google Scholar] [CrossRef]
- Montesano, P.M.; Nelson, R.F.; Dubayah, R.O.; Sun, G.; Cook, B.D.; Ranson, K.J.R.; Næsset, E.; Kharuk, V. The uncertainty of biomass estimates from LiDAR and SAR across a boreal forest structure gradient. Remote Sens. Environ. 2014, 154, 398–407. [Google Scholar] [CrossRef]
- Sun, G.; Ranson, K.J.; Guo, Z.; Zhang, Z. Forest biomass mapping from lidar and radar synergies. Remote Sens. Environ. 2011, 115, 2906–2916. [Google Scholar] [CrossRef]
- Zhao, K.; Popescu, S.; Meng, X.; Pang, Y.; Agca, M. Characterizing forest canopy structure with lidar composite metrics and machine learning. Remote Sens. Environ. 2011, 115, 1978–1996. [Google Scholar] [CrossRef]
- Cocke, A.E.; Fulé, P.Z.; Crouse, J.E. Comparison of burn severity assessments using Differenced Normalized Burn Ratio and ground data. Int. J. Wildland Fire 2005, 14, 189–198. [Google Scholar] [CrossRef]
- Huesca, M.; Garcia, M.; Roth, K.L.; Casas, A.; Ustin, S.L. Canopy structural attributes derived from AVIRIS imaging spectroscopy data in a mixed broadleaf/conifer forest. Remote Sens. Environ. 2016, 182, 208–226. [Google Scholar] [CrossRef]
- Jakubauskas, M.E.; Price, K.P. Empirical relationships between structural and spectral factors of Yellowstone Lodgepole Pine forests. Photogramm. Eng. Remote Sens. 1997, 63, 1375–1381. [Google Scholar]
- Lu, D.; Mausel, P.; Brondızio, E.; Moran, E. Relationships between forest stand parameters and Landsat TM spectral responses in the Brazilian Amazon Basin. For. Ecol. Manag. 2004, 198, 149–167. [Google Scholar] [CrossRef]
- Roberts, D.A.; Ustin, S.L.; Ogunjemiyo, S.; Greenberg, J.; Dobrowski, S.Z.; Chen, J.; Hinckley, T.M. Spectral and Structural Measures of Northwest Forest Vegetation at Leaf to Landscape Scales. Ecosystems 2004, 7, 545–562. [Google Scholar] [CrossRef]
- Erdody, T.L.; Moskal, L.M. Fusion of LiDAR and imagery for estimating forest canopy fuels. Remote Sens. Environ. 2010, 114, 725–737. [Google Scholar] [CrossRef]
- Pierce, A.D.; Farris, C.A.; Taylor, A.H. Use of random forests for modeling and mapping forest canopy fuels for fire behavior analysis in Lassen Volcanic National Park, California, USA. For. Ecol. Manag. 2012, 279, 77–89. [Google Scholar] [CrossRef]
- Loudermilk, E.L.; Hiers, J.K.; O’Brien, J.J.; Mitchell, R.J.; Singhania, A.; Fernandez, J.C.; Cropper, W.P.; Slatton, K.C. Ground-based LIDAR: A novel approach to quantify fine-scale fuelbed characteristics. Int. J. Wildland Fire 2009, 18, 676–685. [Google Scholar] [CrossRef]
- Graham, R.T.; McCaffrey, S.; Jain, T.B. Science Basis for Changing Forest Structure to Modify Wildfire Behavior and Severity; Technical Report; USDA Forest Service, Rocky Mountain Research Station: Washington, DC, USA, 2004. [Google Scholar]
- Miller, J.D.; Quayle, B. Calibration and validation of inmediate post-fire satellite-derived data to three severity metrics. Fire Ecol. 2015, 11, 12–30. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Height | Label | Intensity | Label | Pseudo-Waveform | Label |
|---|---|---|---|---|---|
| 25th Percentile | H25 | 25th Percentile intensity | I25 | Height of Median Energy | HOME |
| 50th Percentile | H50 | 50th Percentile intensity | I50 | Height to median ratio | HTRT |
| 75th Percentile | H75 | 75th Percentile intensity | I75 | Mean Canopy Height | MCH |
| 90th Percentile | H90 | 90th Percentile intensity | I90 | Quadratic Mean Canopy Height | QMCH |
| 99th Percentile | H99 | 99th Percentile intensity | I99 | Coefficient of Variation of the CHP | CVCHP |
| Mean height | Mean_h | Mean intensity | Mean_i | Area Under Canopy Waveform | AUCW |
| Standard deviation | Std_h | Standard deviation intensity | Std_i | ||
| Canopy depth | CD_h | Coefficient of Variation | CV_i | ||
| Kurtosis | Kurt_h | Range of intensities | Range_i | ||
| Skewness | Skew_h | Skewness | Skew_i | ||
| Coefficient of Variation | CV_h | Kurtosis | Kurt_i | ||
| 99th–50th percentile | H99-H50 | Canopy Cover | CC_i | ||
| 99th–25th percentile | H99-H25 | % of intensity accumulated at H25 | %Int_H25 | ||
| 90th–50th percentile | H90-H50 | % of intensity accumulated at H50 | %Int_H50 | ||
| 90th–25th percentile | H90-H25 | % of intensity accumulated at H75 | %Int_H75 | ||
| Canopy Cover | CC_h | % of intensity accumulated at H90 | %Int_H90 | ||
| % of intensity accumulated at H99 | %Int_H99 | ||||
| Canopy Reflection Sum | CRS | ||||
| Density Weighted Canopy Reflection Sum | DWCRS |
| Spectral Index | Formulation | Parameters |
|---|---|---|
| NDVI | ρR: Reflectance in the red spectral region ρNIR: Reflectance in the near infrared spectral region ρSWIR: Reflectance in the shortwave infrared spectral region (either 1 or 2, which are in the 1.7–1.9 µm or 2.1–2.5 µm region, respectively G: Gain factor. Value = 2.5 C1 & C2: Coefficients of the aerosol resistance term. Values = 6 & 7.5, respectively L: Soil-adjustment factor. Value = 1 ρB: Reflectance in the blue spectral region ρG: Reflectance in the green spectral region TCG: Tasseled Cap Greenness TCB: Tasseled Cap Brightness | |
| NDII | ||
| EVI | ||
| VARI | ||
| (TCA) | ||
| (TCD) | ||
| ΔNBR ** | where NBR* is computed as: |
| Feature Selection | Selected Variables | R2 | R2-adj | RMSE (Mg·ha−1) | RRMSE (%) | |||
|---|---|---|---|---|---|---|---|---|
| Stepwise | H50 | Std_i | CCi | 0.96 | 0.96 | 1.68 | 17.02 | |
| 0.75 | 0.70 | 4.34 | 44.52 | |||||
| 0.91 | 0.89 | 2.37 | 24.17 | |||||
| Evolutionary | AUCW | Range_i | %Int_H75 | Veg Type | 0.72 | 0.69 | 4.41 | 44.54 |
| 0.18 | −0.05 | 7.27 | 74.53 | |||||
| 0.58 | 0.50 | 5.15 | 52.34 | |||||
| Expert Knowledge | AUCW | H50 | 0.87 | 0.86 | 3.01 | 30.40 | ||
| 0.81 | 0.79 | 3.28 | 33.68 | |||||
| 0.85 | 0.84 | 3.08 | 31.25 | |||||
| Variable | Metrics Selected | R2 | R2-adj | RMSE | RRMSE (%) |
|---|---|---|---|---|---|
| CFL | B2–B6, NDII, Elevation, Slope | 0.85 | 0.85 | 3.24 | 31.04 |
| 0.72 | 0.71 | 4.43 | 41.80 | ||
| 0.80 | 0.79 | 3.72 | 35.37 | ||
| CC | B6 | 0.79 | 0.79 | 0.09 | 18.88 |
| 0.78 | 0.78 | 0.10 | 19.40 | ||
| 0.79 | 0.79 | 0.09 | 19.09 | ||
| CBD | Brightness, Wetness, Elevation | 0.66 | 0.65 | 0.03 | 36.71 |
| 0.60 | 0.60 | 0.03 | 37.23 | ||
| 0.64 | 0.63 | 0.03 | 36.92 |
| Burn Severity Level | CFL | CC | CBD |
|---|---|---|---|
| Correlation | |||
| low | −0.14 | 0.04 | 0.01 |
| moderate | 0.13 | 0.34 | 0.24 |
| high | 0.26 | 0.59 | 0.31 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
García, M.; Saatchi, S.; Casas, A.; Koltunov, A.; Ustin, S.L.; Ramirez, C.; Balzter, H. Extrapolating Forest Canopy Fuel Properties in the California Rim Fire by Combining Airborne LiDAR and Landsat OLI Data. Remote Sens. 2017, 9, 394. https://0-doi-org.brum.beds.ac.uk/10.3390/rs9040394
García M, Saatchi S, Casas A, Koltunov A, Ustin SL, Ramirez C, Balzter H. Extrapolating Forest Canopy Fuel Properties in the California Rim Fire by Combining Airborne LiDAR and Landsat OLI Data. Remote Sensing. 2017; 9(4):394. https://0-doi-org.brum.beds.ac.uk/10.3390/rs9040394
Chicago/Turabian StyleGarcía, Mariano, Sassan Saatchi, Angeles Casas, Alexander Koltunov, Susan L. Ustin, Carlos Ramirez, and Heiko Balzter. 2017. "Extrapolating Forest Canopy Fuel Properties in the California Rim Fire by Combining Airborne LiDAR and Landsat OLI Data" Remote Sensing 9, no. 4: 394. https://0-doi-org.brum.beds.ac.uk/10.3390/rs9040394