1. Introduction
Extraction of forest structure attributes, such as stem density, diameter at breast height (DBH), basal area (BA), tree height, biomass, plant area index (PAI) and canopy density from LiDAR (light detection and ranging), has become an important method to inventory and monitor forest resources, and for informing forest management and conservation policy development [
1,
2,
3,
4,
5]. Terrestrial LiDAR, also known as terrestrial laser scanning (TLS), can be used to measure and estimate these forest structure attributes at single-tree and plot levels [
3,
6,
7]. Although structure attributes derived from TLS data are generally limited in extent to plot-level estimates due to scanning logistics (i.e., field operation time), these attributes can be used as predictors in regression models or machine learning algorithms to estimate structure from datasets over regional to global areas, i.e., airborne laser scanning (ALS) and multispectral or synthetic aperture radar (SAR) satellite imagery [
8]).
Multi-temporal TLS measurements can be used to assess change over time in forest structure attributes [
9,
10,
11,
12]. However, the measurement of forest structure attributes must be able to detect “true” change, not “false” change detected from incorrect sensor settings, scanner placement or data post-processing. Accurately measuring forest structure attributes, such as understorey height and cover, first requires normalisation of TLS point heights to height above ground. For single-tree measurement, it is possible to normalise the point cloud height by placement of a marker at a pre-defined height. However, for cases where whole of plot forest attributes are to be derived and the site terrain is complex, the placement of a very large number of markers would be required, making this method too time intensive to be practical.
Creating an accurate DEM for normalising of the point cloud to height above ground ensures that TLS structure measurements collected at the plot level are accurate, repeatable and able to be used to detect and measure change. The accuracy of the DEM used to adjust point height, to a height above ground, is a significant control on differences in the estimation of forest structure attributes commonly reported in the literature [
13]. In flat, open sites, the ground will not be obscured. However, forested and sloped environments are more complex than “open” landscapes. Trees occlude the ground behind them, and it is necessary to obtain multiple scans to remove or reduce occlusion.
Both ALS and TLS have been used routinely to characterize the ground surface [
14,
15,
16,
17]. ALS is able to characterize the ground over large areas, with the point density usually within 2–20 points per square metre. ALS providers generally undertake a vertical accuracy assessment, with a typical user specification being ±20 cm at a 95% confidence interval of survey control. TLS captures a more detailed representation of the ground surface than is possible with ALS, by generating highly accurate points (millimetre accuracy) with typically hundreds of ground points per square metre (depending on distance from the scanner and instrument settings). DEMs have been developed from TLS and their accuracy assessed in the surveying and geomorphology applications [
15,
18]. In forested environments, although the majority of published studies estimating forest structure attributes use DEMs derived from TLS point clouds, the accuracy of DEMs derived from TLS and the DEM influence on the accuracy of estimated forest structure attributes has not been widely investigated.
The primary aim of this paper was to test a number of TLS scan configurations, filtering options and output DEM pixel sizes, to define a best practise method for DEM generation in sub-tropical forest environments. This was achieved by addressing four objectives:
To assess TLS DEM accuracy by comparing DEMs generated from TLS to total station (TS) spot heights.
To compare a 1-m resolution DEM generated from ALS to TS spot heights, to determine if ALS can be used for accuracy assessment of a TLS DEM and if an ALS DEM can be used as a replacement for a TLS DEM for normalisation of the TLS point cloud height.
To compare DEMs generated from TLS to a 1-m resolution DEM generated from ALS to determine the spatial pattern of errors occurring in the TLS DEM.
To assess the repeatability of TLS DEM generation in sub-tropical forests, by evaluating error statistics for three consecutive TLS campaigns in this environment.
To assess the accuracy of a TLS DEM, it is necessary to obtain a validation dataset of a higher order of accuracy. A TS is capable of providing the ground classification certainty and elevation accuracy necessary to provide a reliable set of data for accuracy assessment (where one is certain the pole and prism used with the TS are on the ground) [
15]. However, due to survey time requirements, the position of only a limited number of points can be measured with a TS, so the accuracy of the DEM can only be sampled at these locations [
18]. Other research has used ALS to assess the accuracy of TLS-derived DEMs [
13]. Using ALS data has the benefit of greater spatial coverage than can realistically be collected with a TS. However, further research is needed to determine ALS dataset accuracy under trees. This can be achieved by comparing the ALS DEM to the TS spot heights, to validate its elevation accuracy at the local study site. This will determine if the ALS DEM is suitable for validation of TLS DEMs or as a replacement for a TLS DEM in normalising the TLS point cloud to height above ground.
1.1. Background
Producing an accurate ground representation from LiDAR has proven to be a difficult problem to solve [
19]. A review of the literature on DEMs produced from TLS in forested environments showed a number of different methods, using between 1–24 scans and with grid resolutions ranging from 0.02 m–8 m (
Table 1). Studies estimating forest structure attributes from TLS often apply algorithms developed for DEM generation with ALS data, even though there are significant differences in point density and viewing geometry between these two types of LiDAR, which may mean that DEM development methods from ALS are not best suited to TLS datasets [
20,
21]. For example, due to the overhead and vertical acquisition of ALS, the pulse angle is less affected by foreground objects obscuring the ground surface (except in very dense canopies), as opposed to side-view TLS acquisition, where trees and grass block the laser pulse reaching the ground. In addition, ALS is captured in a broad nadir swath, whereas TLS is acquired in a horizontal radial acquisition pattern around the scanner location.
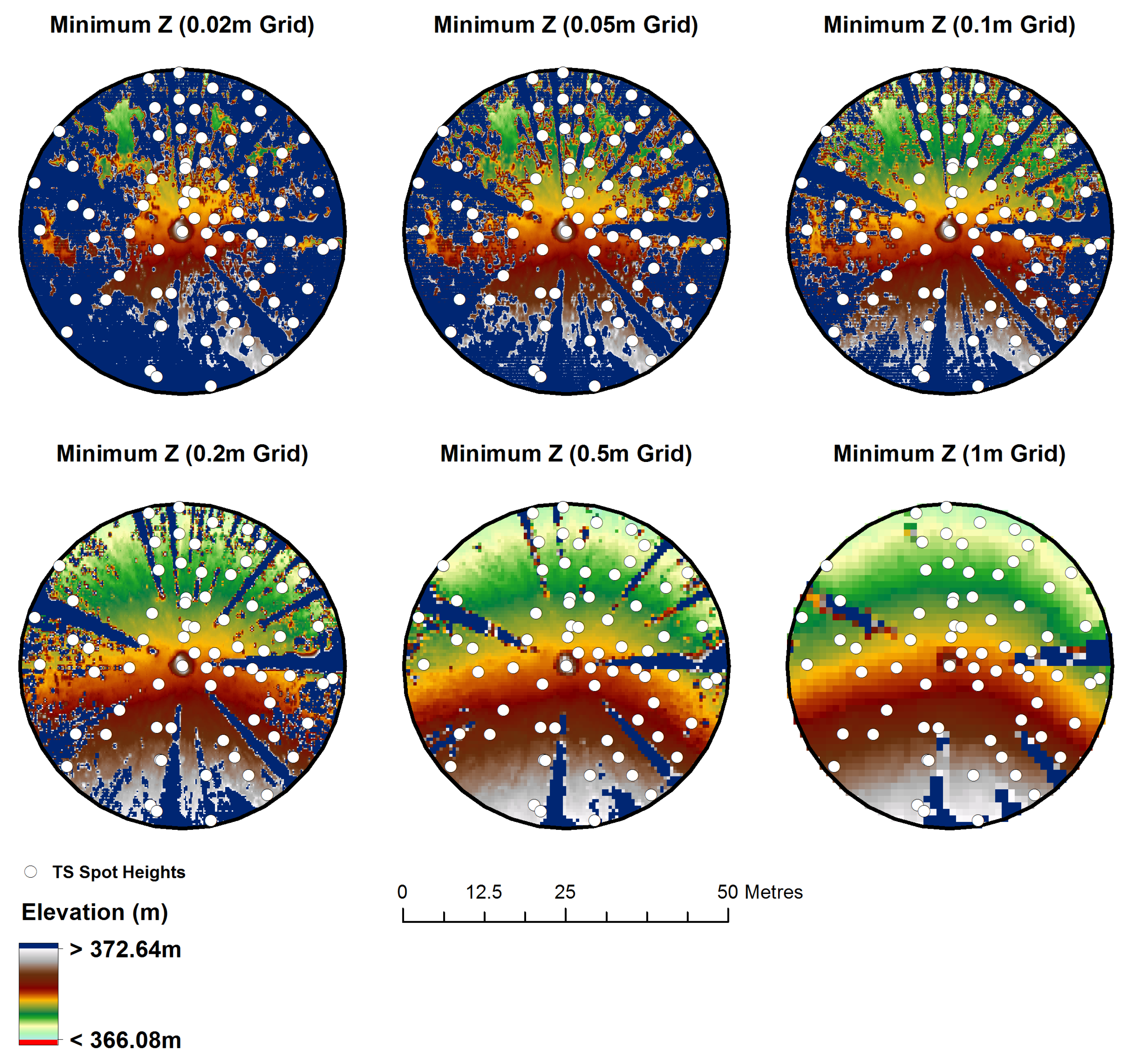
The simplest approach for TLS DEM generation is to use a height adjustment based on scanner height, which may be sufficient where the site is flat [
13], but unlikely to be sufficient in sloping sites. Nearly all TLS studies use a minimum elevation (subsequently referred to as the minimum Z value to avoid confusion between scan and projected coordinates) within a specified bin size (i.e.,
m in the X,Y coordinate plane) as the first step to determine ground points [
13,
15,
21,
22,
23]. Other filters are then typically applied to further filter the dataset to only ground points. These include slope threshold [
21], morphological filters [
24], median filters [
15], or a surface-fitting algorithm through the minimum Z values, i.e., RANSAC [
23], linear plane fitting [
13], or splines, and then, all points within a specified height threshold from this plane are classified as ground [
21,
23]. Morphological filters, which rely on an iterative change in window size, as well as slope and height thresholds, are often commonly applied to the generation of DEMs from airborne LiDAR [
17,
25]; however, only one example was found as applied to TLS [
24]. A number of different interpolation methods was found for airborne LiDAR including nearest neighbour, natural neighbour, inverse distance weighting (IDW), kriging and bilinear interpolation [
2,
26,
27], but again, their application to TLS data was a relatively limited subset of that used for ALS datasets.
Three validation data sources were found: ALS [
13,
21], TS [
15] and data derived from the TLS point cloud [
24]; while some studies reported no error attributes [
22,
23]. The methods used by [
15,
24] have the lowest reported errors, at grid resolutions of less than 1 m.
Based on this review of literature, we chose a method for DEM generation that combines the methods of [
11,
24] using a morphological filter and median filter, with a natural neighbour interpolation. The morphological filter was chosen for testing due to its successful and widespread use in ALS DEM generation [
17,
25] and current limited application, but promising results with TLS DEM generation [
24]. Chaplot et al. [
28] found that where point density was high (as in a TLS scan) the choice of interpolation method made little difference to the errors in the derived DEM; however, where point density was low, the spatial structure of the landscape influenced which interpolator performed the best, suggesting that with TLS, the interpolator is not likely to be a major influence on DEM accuracy. We chose natural neighbour interpolation, as it does not change the value of existing data points and produces interpolated values within the range of the input values. This is unlike some other interpolation methods, such as IDW or splines, that produce interpolated values at the original data point locations that are very close to the original values, but not exactly the same [
29].
4. Discussion
The implications of an incorrect DEM for forest structure parameter estimation are that if the points are adjusted to an incorrect height, they will be from a different position. For example, errors will result in DBH estimation if points from inaccurate positions are used, no matter how good the DBH estimation method for fitting the tree circumference. When calculating foliage profiles, the points position in relation to one another (and therefore, the amount of foliage by height) will be impacted based on the DEM. However, it is the understorey attributes that are most likely to be affected by the DEM. Various different definitions exist for defining understorey, but all rely on some kind of height or structure to define areas close to the ground (i.e., within 2 m of the ground surface [
31]). If the DEM used has large errors, then the errors may be greater than the height threshold used to define the understorey layer.
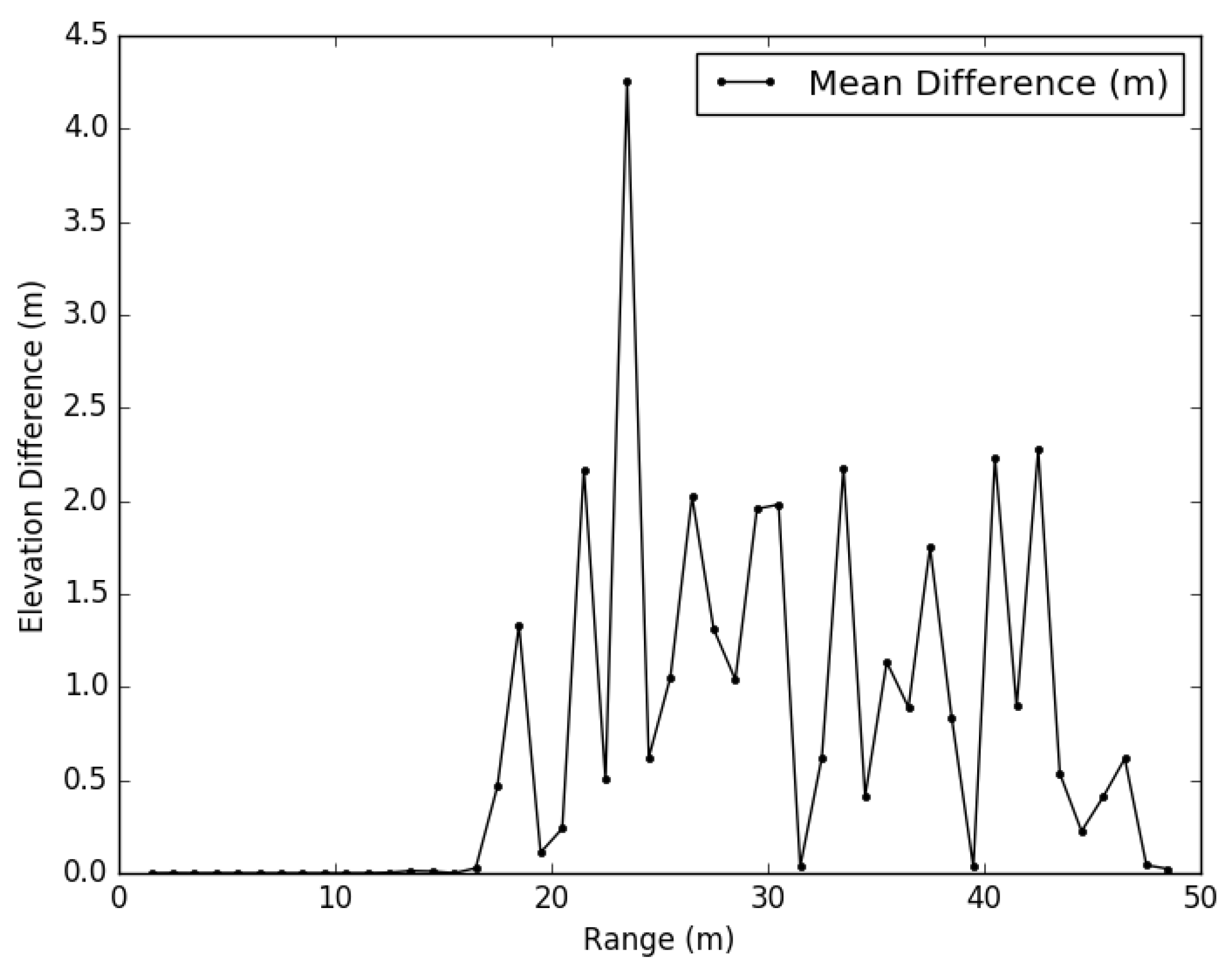
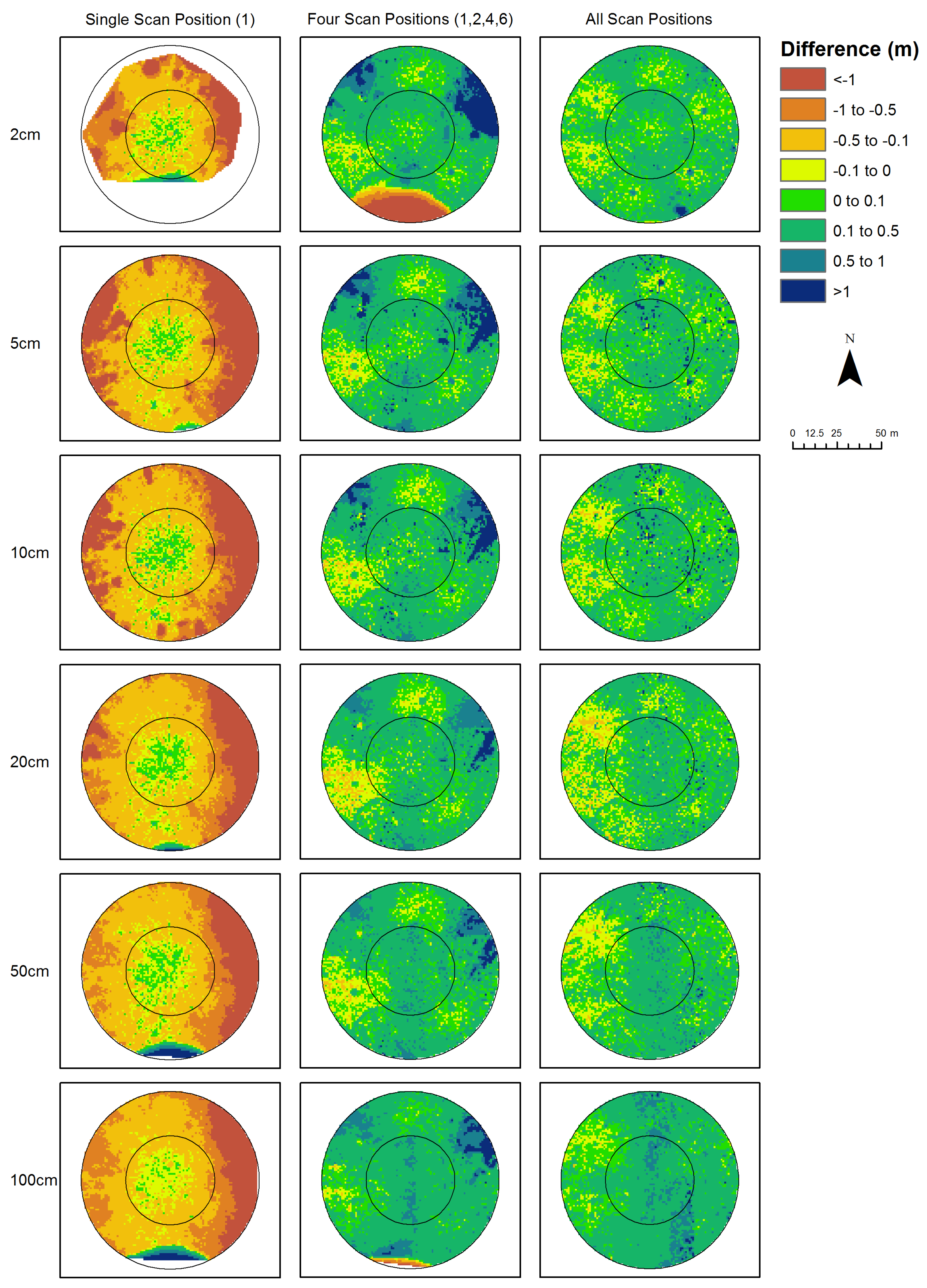
The research presented in this paper shows that even when using a high resolution TLS instrument, in a forest environment, multiple scans are necessary to adequately characterise the DEM surface within a 50-m range from the plot centre. Based on our comparison to ALS data, a multiple scan position survey design with a 25-m radius plot will reduce errors compared to a single scan position design. However, survey time restrictions do not always allow for scan acquisition at multiple scan positions. Our results show that if using a DEM produced from a single scan, it would be advised to limit the range to <25 m from the plot centre.
The mean error for the comparison of the ALS DEM to TS spot heights was 0.15 m, which shows that the airborne LiDAR DEM is consistently above the “true” ground surface. This may be due to dead time for successive ALS measurements not being sufficient, i.e., the laser point return is from grass or understorey, and due to the near nadir view point, the dead time is greater than the distance to the ground, or the inability of the laser to penetrate fully to the ground. The dead time for successive measurements is similar for TLS, but is likely to be less important than for ALS, due to the much larger number of laser returns generated with TLS, increasing the chance that some of them will pass through grass and understorey gaps to hit the ground. Note that RMSE values for comparison of the TLS DEMs to TS spot heights were also all positive, and therefore, the TLS DEMs were also on average above the ground surface measured by the total station, again likely due to the obfuscation of the ground by grass and understorey.
Using a larger grid resolution (i.e., 1 m) to generate the DEM, a simple method such as minimum Z is able to produce a DEM with low error (i.e., 0.19-m mean error for a 1-m grid resolution using a single scan position and at a 25-m plot radius). However, at this resolution, small features in the ground surface are not able to be identified (i.e., they are smaller than 1 m), and so, for use in estimating understorey attributes, it is advised to use a smaller grid resolution and a more complex DEM method such as the one presented here.
The low mean error (0.15 m) from the ALS DEM to TS spot height comparison suggests that where the grid resolution of the ALS DEM fits with the intended forest attributes to be extracted (i.e., the features of interest are not smaller than the ALS grid resolution), then it is appropriate to use the ALS DEM to normalise the TLS point cloud to the height above ground. However, the point density of ALS captures is not always sufficiently high enough to allow a DEM to be produced at the required resolution (often, point density means that the smallest grid resolution possible for an ALS DEM is a 1-m grid resolution). For extracting forest understorey attributes related to features such as coarse woody debris, smaller in size than 1 m, the use of a TLS DEM to normalise point cloud height will be necessary.
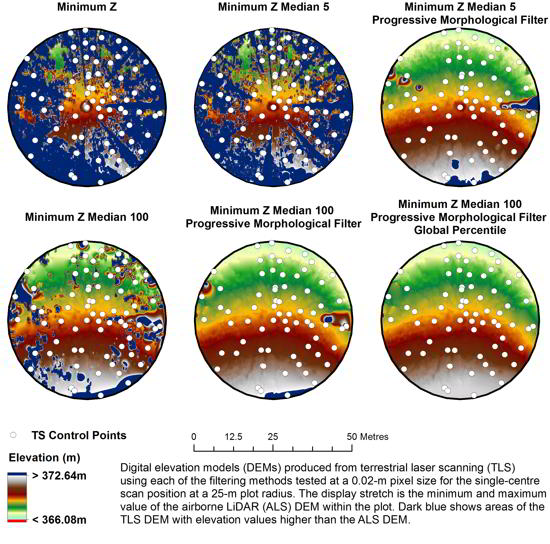
Our results suggest that the practice of using only single and last returns in DEM production from ALS data is not appropriate for TLS data and introduces additional error. The PMF method is routinely used with airborne LiDAR to generate DEMs [
15,
24]. The results from our analysis show that the combination of a PMF filter with a median filter and global percentile greatly reduces the error of TLS DEMs at smaller grid sizes such as 0.02 m. It is therefore suggested as an important processing step for DEM production from TLS data where a DEM is required at fine grid resolution.
The site we used for our analysis is relatively complex, having areas of varying slope, moderate to high grass cover and a moderate tree density. Using our suggested scan setup of seven scan positions, we were able to produce a DEM with mean error of 0.28 m for a 50-m radius plot under these conditions. This setup should also be appropriate in sites with lower tree density, slope and grass cover. This method however is not designed to be a one fits all solution, but rather to be modified based on plot characteristics, by fine tuning the thresholds and increasing the complexity from the simple minimum Z filter, through to the more complex minimum Z + median 100 + PMF + global percentile method.
Further research is planned to investigate the retrieval of fine-scale understorey attributes from TLS data, including understorey attributes related to point density and average height, as well as the detection of coarse woody debris. For this to be achievable, it was first necessary to derive a robust method of DEM production at a small grid resolution. The literature search conducted did not uncover such a method, and so, the work presented within this paper aims to fill that gap and to provide a general overview of the findings related to TLS DEM production within a forest environment. The lack of understanding of TLS-generated DEM surfaces (or in some cases, the lack of DEM altogether) may influence the accuracy and repeatability of forestry overstorey and understorey attributes produced from TLS data. Accounting for subtle errors is particularly important in monitoring applications, as multiple errors from successive TLS surveys can be compounded and lead to inaccurate results.


 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}