
A Novel Approach for a Chip-Sized Scanning Optical Microscope

 , , , , , , , , and
, , , , , , , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
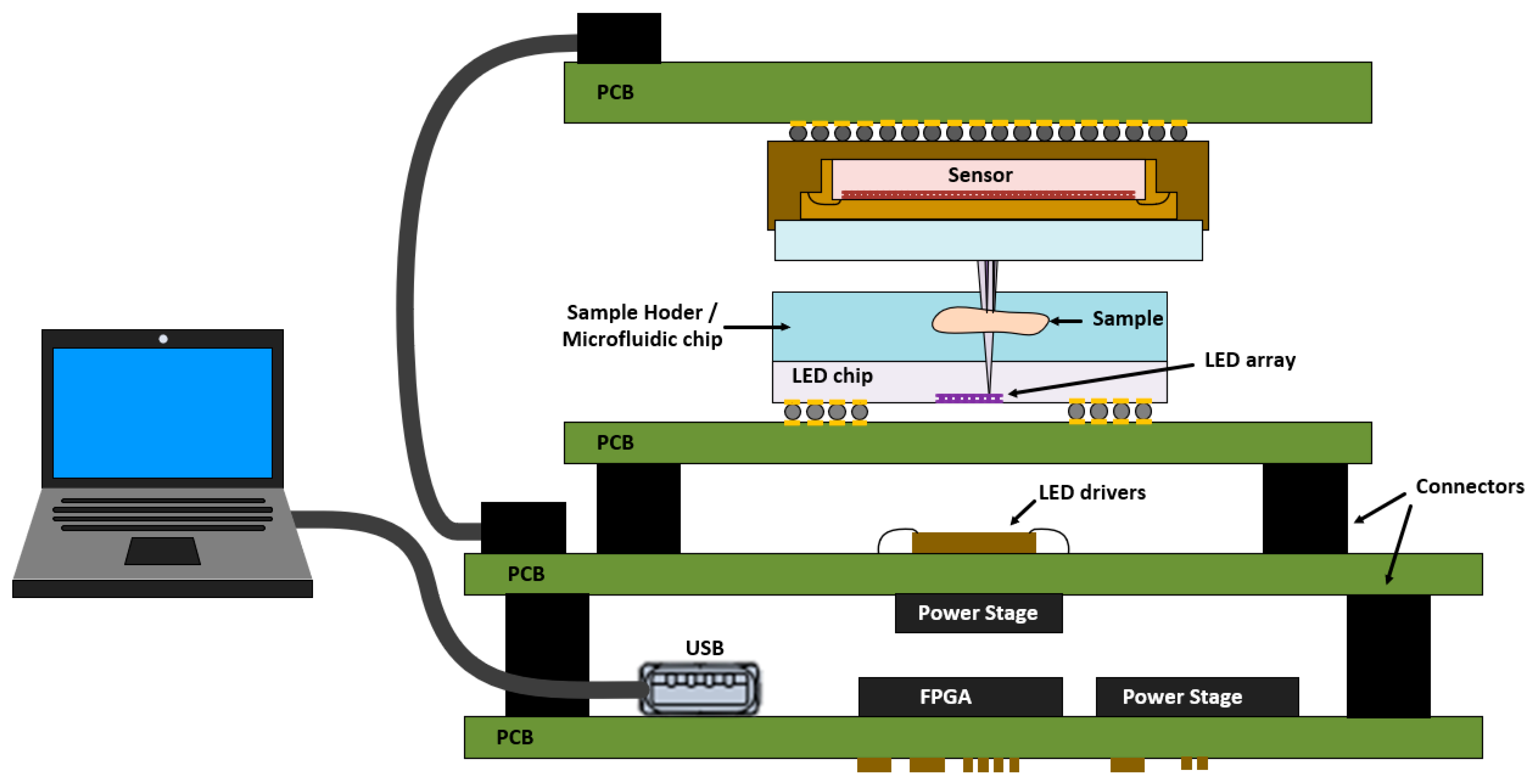
2.1. Microscope Architecture Overview
2.1.1. LED Chips
2.1.2. LED Array Driver
2.1.3. Optical Detector
2.2. Microscope Operation
2.2.1. Transmission Image Reconstruction
2.2.2. LED Array Equalization
2.3. Test Sample
3. Results
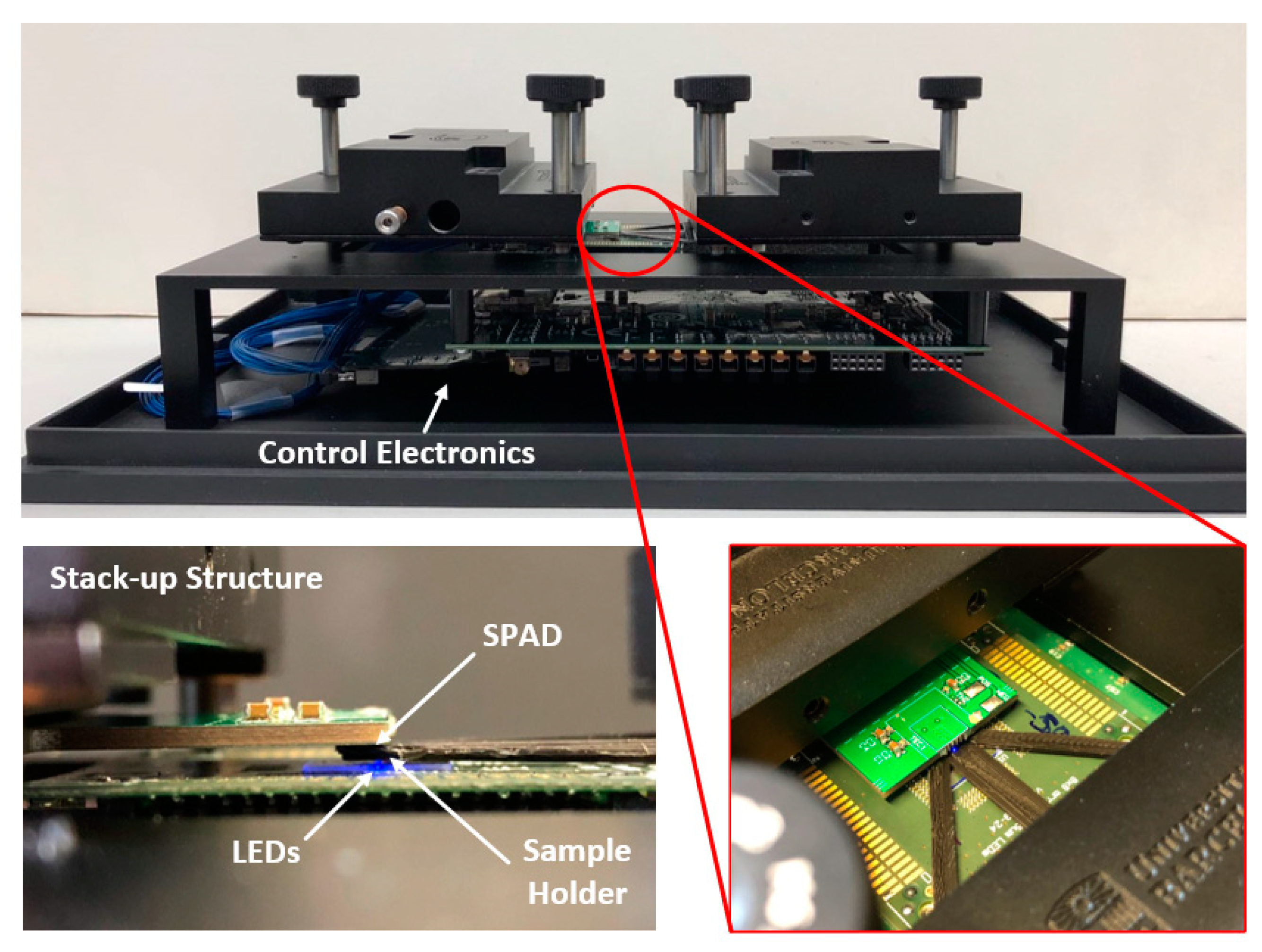
3.1. First Microscope Generation
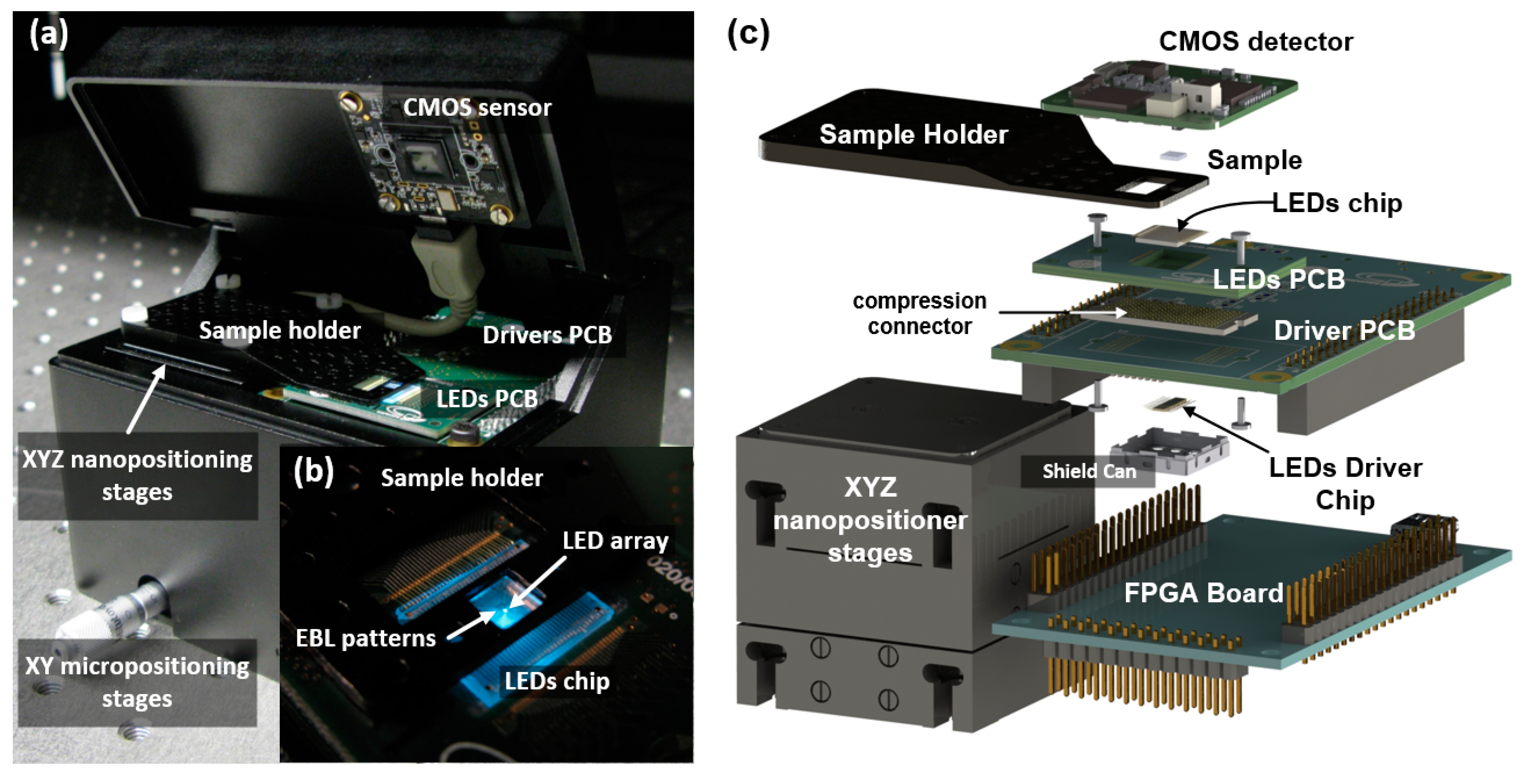
3.2. Second Microscope Generation
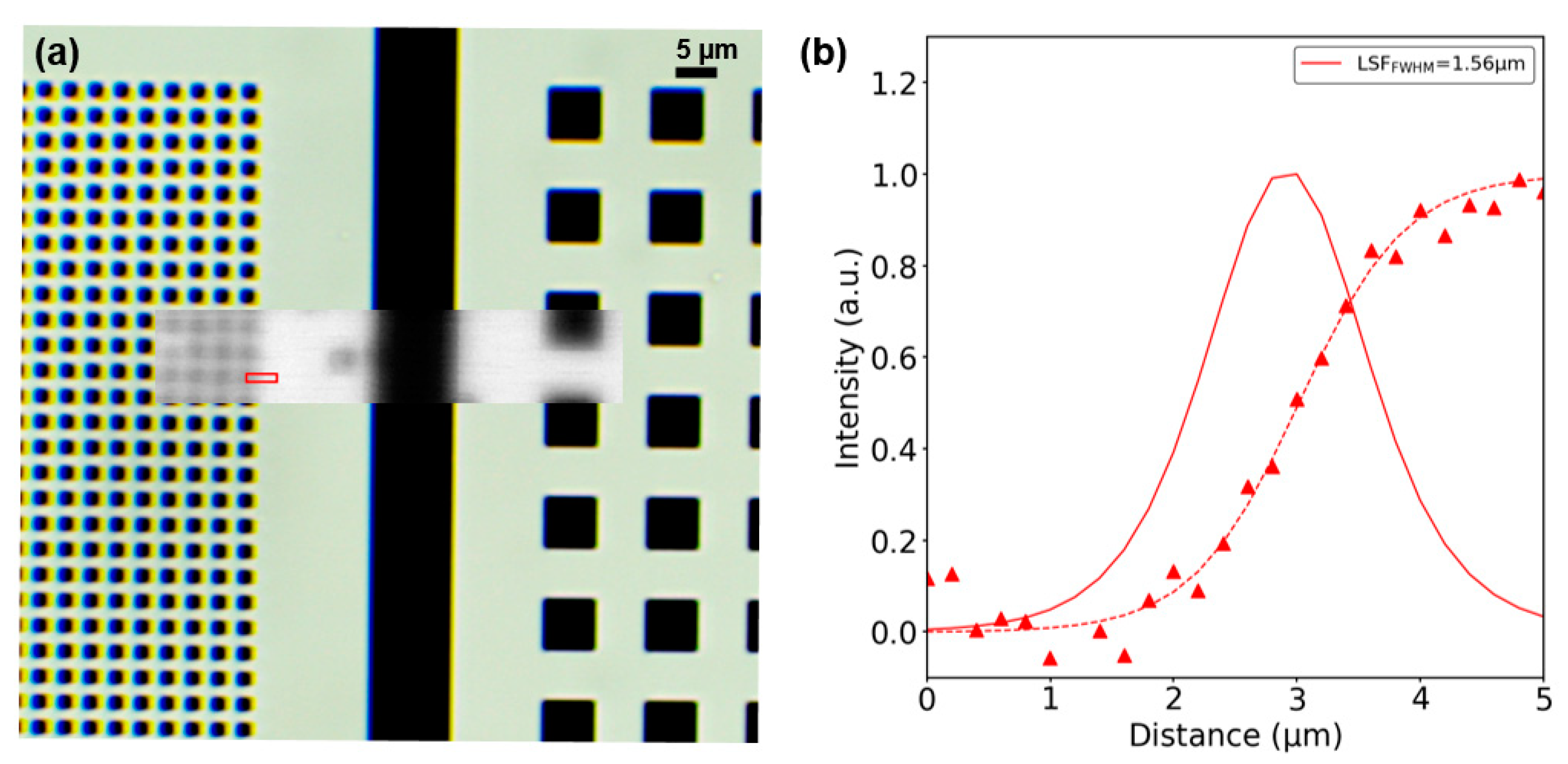
3.3. Third Microscope Generation
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- McLeod, E.; Ozcan, A. Microscopy without Lenses. Phys. Today 2017, 70, 51–56. [Google Scholar] [CrossRef] [Green Version]
- McLeod, E.; Ozcan, A. Unconventional Methods of Imaging: Computational Microscopy and Compact Implementations. Rep. Prog. Phys. 2016, 79, 076001. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Khimji, I.; Gurkan, U.A.; Safaee, H.; Catalano, P.N.; Keles, H.O.; Kayaalp, E.; Demirci, U. Lensless Imaging for Simultaneous Microfluidic Sperm Monitoring and Sorting. Lab Chip 2011, 11, 2535–2540. [Google Scholar] [CrossRef]
- Dolega, M.E.; Allier, C.; Kesavan, S.V.; Gerbaud, S.; Kermarrec, F.; Marcoux, P.; Dinten, J.-M.; Gidrol, X.; Picollet-D’hahan, N. Label-Free Analysis of Prostate Acini-like 3D Structures by Lensfree Imaging. Biosens. Bioelectron. 2013, 49, 176–183. [Google Scholar] [CrossRef]
- Stybayeva, G.; Mudanyali, O.; Seo, S.; Silangcruz, J.; Macal, M.; Ramanculov, E.; Dandekar, S.; Erlinger, A.; Ozcan, A.; Revzin, A. Lensfree Holographic Imaging of Antibody Microarrays for High-Throughput Detection of Leukocyte Numbers and Function. Anal. Chem. 2010, 82, 3736–3744. [Google Scholar] [CrossRef] [Green Version]
- Coskun, A.F.; Sencan, I.; Su, T.-W.; Ozcan, A. Lensless Wide-Field Fluorescent Imaging on a Chip Using Compressive Decoding of Sparse Objects. Opt. Express 2010, 18, 10510. [Google Scholar] [CrossRef] [PubMed]
- Jiang, S.; Zhu, J.; Song, P.; Guo, C.; Bian, Z.; Wang, R.; Huang, Y.; Wang, S.; Zhang, H.; Zheng, G. Wide-Field, High-Resolution Lensless on-Chip Microscopy via near-Field Blind Ptychographic Modulation. Lab Chip 2020. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bishara, W.; Su, T.-W.; Coskun, A.F.; Ozcan, A. Lensfree On-Chip Microscopy over a Wide Field-of-View Using Pixel Super-Resolution. Opt. Express 2010, 18, 11181. [Google Scholar] [CrossRef] [PubMed]
- Takahashi, S.; Huang, Y.-M.; Sze, J.-J.; Wu, T.-T.; Guo, F.-S.; Hsu, W.-C.; Tseng, T.-H.; Liao, K.; Kuo, C.-C.; Chen, T.-H.; et al. A 45 Nm Stacked CMOS Image Sensor Process Technology for Submicron Pixel. Sensors 2017, 17, 2816. [Google Scholar] [CrossRef] [Green Version]
- Kapusta, P.; Wahl, M.; Erdmann, R. Advanced Photon. Counting: Applications, Methods, Instrumentation; Kapusta, P., Wahl, M., Erdmann, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; ISBN 978-3-319-35429-3. [Google Scholar]
- Barnard, K.J.; Barnard, K.J.; Bognar, J.G.; Armstrong, E.E.; Watson, E.A. High-Resolution Image Reconstruction from a Sequence of Rotated and Translated Frames and Its Application to an Infrared Imaging System. Opt. Eng. 1998, 37, 247. [Google Scholar] [CrossRef]
- Luo, W.; Greenbaum, A.; Zhang, Y.; Ozcan, A. Synthetic Aperture-Based on-Chip Microscopy. Light Sci. Appl. 2015, 4. [Google Scholar] [CrossRef]
- Ozcan, A.; McLeod, E. Lensless Imaging and Sensing. Annu. Rev. Biomed. Eng. 2016. [Google Scholar] [CrossRef] [Green Version]
- EU Funded Research Project ChipScope. Overcoming the Limits of Diffractionwith Super-Resolution Lighting on a Chip. 737089. 2020. Available online: www.chipscope.eu (accessed on 31 March 2021).
- Auf der Maur, M.; Palazzo, D.; Gülink, J.; Bornemann, S.; Wasisto, H.S.; Reale, A.; Prades, J.D.; Waag, A.; di Carlo, A. Towards Super-Resolution Illumination from InGaN/GaN NanoLED Arrays. In Light-Emitting Devices, Materials, and Applications; Kim, J.K., Krames, M.R., Strassburg, M., Eds.; SPIE: San Francisco, CA, USA, 2019. [Google Scholar]
- Wasisto, H.S.; Prades, J.D.; Gülink, J.; Waag, A. Beyond Solid-State Lighting: Miniaturization, Hybrid Integration, and Applications of GaN Nano-and Micro-LEDs. Appl. Phys. Rev. 2019, 6, 41315. [Google Scholar] [CrossRef] [Green Version]
- Bezshlyakh, D.D.; Spende, H.; Weimann, T.; Hinze, P.; Bornemann, S.; Gülink, J.; Canals, J.; Prades, J.D.; Dieguez, A.; Waag, A. Directly Addressable GaN-Based Nano-LED Arrays: Fabrication and Electro-Optical Characterization. Microsyst. Nanoeng. 2020, 6, 1–10. [Google Scholar] [CrossRef]
- Grist, S.M.; Nasseri, S.S.; Laplatine, L.; Schmok, J.C.; Yao, D.; Hua, J.; Chrostowski, L.; Cheung, K.C. Long-Term Monitoring in a Microfluidic System to Study Tumour Spheroid Response to Chronic and Cycling Hypoxia. Sci. Rep. 2019, 9, 1–13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rodriguez, G.; Rodriguez, D.F. Analysis of Solder Paste Release in Fine Pitch Stencil Printing Processes. J. Electron. Packag. Trans. ASME 1999, 121, 169–178. [Google Scholar] [CrossRef]
- Madenci, E.; Shkarayev, S.; Mahajan, R. Potential Failure Sites in a Flip-Chip Package with and without Underfill. J. Electron. Packag. Trans. ASME 1998, 120, 336–341. [Google Scholar] [CrossRef]
- Gülink, J.; Bornemann, S.; Spende, H.; der Maur, M.A.; di Carlo, A.; Prades, J.D.; Wasisto, H.S.; Waag, A. InGaN/GaN NanoLED Arrays as a Novel Illumination Source for Biomedical Imaging and Sensing Applications. Proceedings 2018, 2, 892. [Google Scholar] [CrossRef] [Green Version]
- Franch, N.; Canals, J.; Moro, V.; Vilá, A.; Romano-Rodríguez, A.; Prades, J.D.; Gülink, J.; Bezshlyakh, D.; Waag, A.; Kluczyk-Korch, K.; et al. Nano Illumination Microscopy: A Technique Based on Scanning with an Array of Individually Addressable NanoLEDs. Opt. Express 2020, 28, 19044–19057. [Google Scholar] [CrossRef]
- Piruska, A.; Nikcevic, I.; Lee, S.H.; Ahn, C.; Heineman, W.R.; Limbach, P.A.; Seliskar, C.J. The Autofluorescence of Plastic Materials and Chips Measured under Laser Irradiation. Lab Chip 2005, 5, 1348. [Google Scholar] [CrossRef]
- Canals, J.; Moro, V.; Franch, N.; Moreno, S.; Alonso, O.; Vilà, A.; Prades, J.D.; Gülink, J.; Bezshlyakh, D.D.; Waag, A.; et al. A Shadow Image Microscope Based on an Array of NanoLEDs. In Proceedings of the Unconventional Optical Imaging II, 6–10 April 2020; Online Event. Fournier, C., Georges, M.P., Popescu, G., Eds.; SPIE: Cardiff, UK, 2020; Volume 11351, p. 11. [Google Scholar]
- Ding, K.; Avrutin, V.; Izyumskaya, N.; Özgür, Ü.; Morkoç, H. Micro-LEDs, a Manufacturability Perspective. Appl. Sci. 2019, 9, 1206. [Google Scholar] [CrossRef] [Green Version]
- Kluczyk-Korch, K.; Palazzo, D.; Waag, A.; Diéguez, A.; Prades, J.D.; di Carlo, A.; der Maur, M.A. Optical Design of InGaN/GaN NanoLED Arrays on a Chip: Toward: Highly Resolved Illumination. Nanotechnology 2020, 32, 105203. [Google Scholar] [CrossRef] [PubMed]
- Zuo, C.; Li, J.; Sun, J.; Fan, Y.; Zhang, J.; Lu, L.; Zhang, R.; Wang, B.; Huang, L.; Chen, Q. Transport of Intensity Equation: A Tutorial. Opt. Lasers Eng. 2020, 135, 106187. [Google Scholar]
- Lee, S.-H.; Roichman, Y.; Yi, G.-R.; Kim, S.-H.; Yang, S.-M.; van Blaaderen, A.; van Oostrum, P.; Grier, D.G. Characterizing and Tracking Single Colloidal Particles with Video Holographic Microscopy. Opt. Express 2007, 15, 18275. [Google Scholar] [CrossRef] [PubMed]
- Mann, C.J.; Yu, L.; Lo, C.-M.; Kim, M.K. High-Resolution Quantitative Phase-Contrast Microscopy by Digital Holography. Opt. Express 2005, 13, 8693. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sheng, J.; Malkiel, E.; Katz, J. Digital Holographic Microscope for Measuring Three-Dimensional Particle Distributions and Motions. Appl. Opt. 2006, 45, 3893–3901. [Google Scholar] [CrossRef]
- Ou, F.; Chong, W.C.; Xu, Q.; Chen, Y.; Li, Q.; Zhang, L. Monochromatic Active Matrix Micro-LED Micro-displays with >5,000 Dpi Pixel Density Fabricated Using Monolithic Hybrid Integration Process. Sid Symp. Dig. Tech. Pap. 2018, 49, 1677–1680. [Google Scholar] [CrossRef]
- James Singh, K.; Huang, Y.-M.; Ahmed, T.; Liu, A.-C.; Huang Chen, S.-W.; Liou, F.-J.; Wu, T.; Lin, C.-C.; Chow, C.-W.; Lin, G.-R.; et al. Micro-LED as a Promising Candidate for High-Speed Visible Light Communication. Appl. Sci. 2020, 10, 7384. [Google Scholar] [CrossRef]
- Dixon, A.E.; Damaskinos, S.; Atkinson, M.R. A Scanning Confocal Microscope for Transmission and Reflection Imaging. Nature 1991, 351, 551–553. [Google Scholar] [CrossRef]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Canals, J.; Franch, N.; Moro, V.; Moreno, S.; Prades, J.D.; Romano-Rodríguez, A.; Bornemann, S.; Bezshlyakh, D.D.; Waag, A.; Vogelbacher, F.; et al. A Novel Approach for a Chip-Sized Scanning Optical Microscope. Micromachines 2021, 12, 527. https://0-doi-org.brum.beds.ac.uk/10.3390/mi12050527
Canals J, Franch N, Moro V, Moreno S, Prades JD, Romano-Rodríguez A, Bornemann S, Bezshlyakh DD, Waag A, Vogelbacher F, et al. A Novel Approach for a Chip-Sized Scanning Optical Microscope. Micromachines. 2021; 12(5):527. https://0-doi-org.brum.beds.ac.uk/10.3390/mi12050527
Chicago/Turabian StyleCanals, Joan, Nil Franch, Victor Moro, Sergio Moreno, Juan Daniel Prades, Albert Romano-Rodríguez, Steffen Bornemann, Daria D. Bezshlyakh, Andreas Waag, Florian Vogelbacher, and et al. 2021. "A Novel Approach for a Chip-Sized Scanning Optical Microscope" Micromachines 12, no. 5: 527. https://0-doi-org.brum.beds.ac.uk/10.3390/mi12050527