
A Novel Simulation Platform for Underwater Data Muling Communications Using Autonomous Underwater Vehicles

 , , , ,
, , , ,  ,
,
Abstract
:1. Introduction
- A more realistic AML simulator, considering the designed suite of sensors and emulating their expected performances;
- The simulation of the designed estimation layer and the control under the influence of measurement noise;
- The inclusion of the antenna radiation patterns to help in evaluating the design and relative positioning of underwater antennas.
2. Related Work
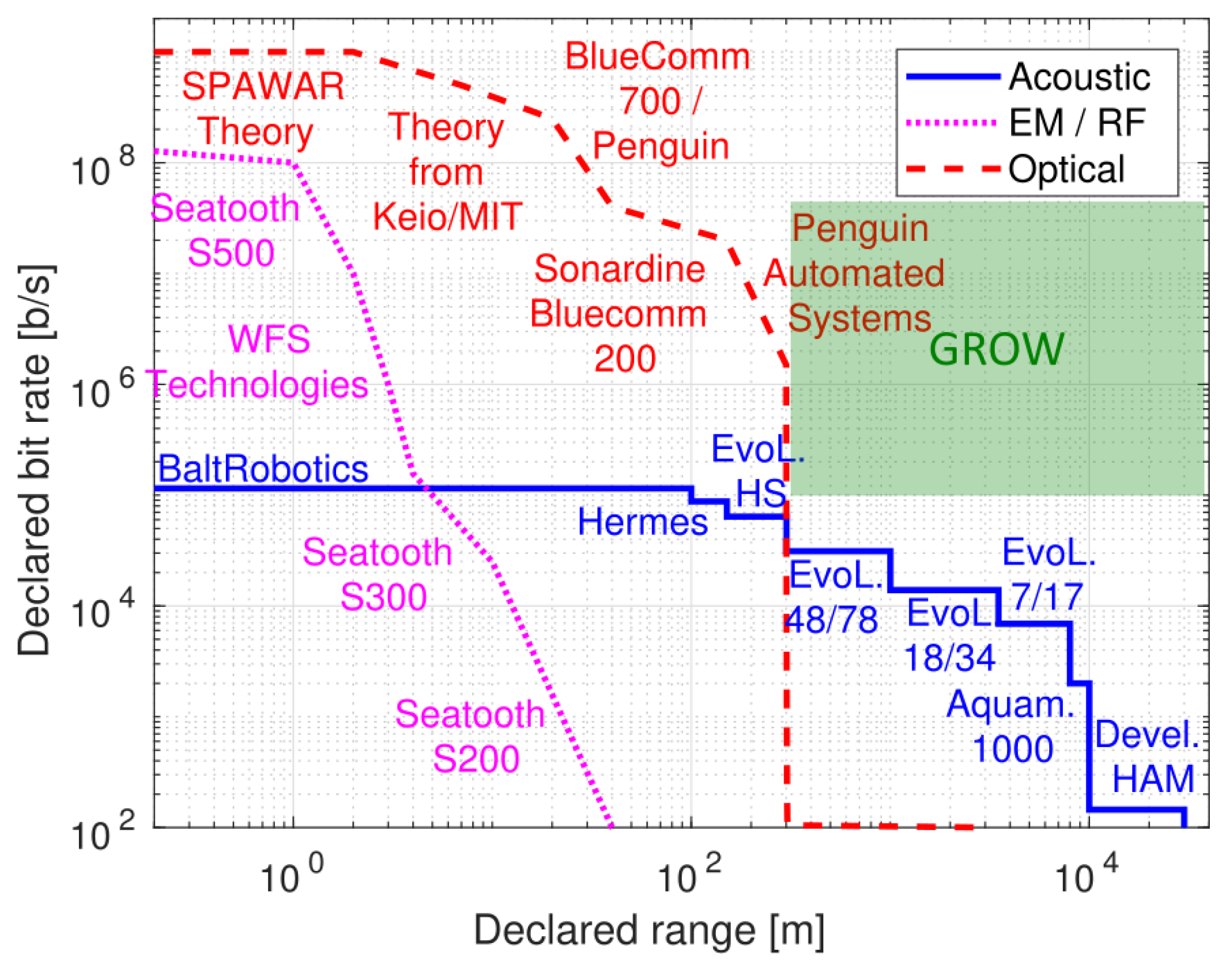
2.1. Underwater Communications Technologies
2.2. Underwater Delay-Tolerant Networks
2.3. Underwater Data Muling
2.4. AUV Navigation and Localization
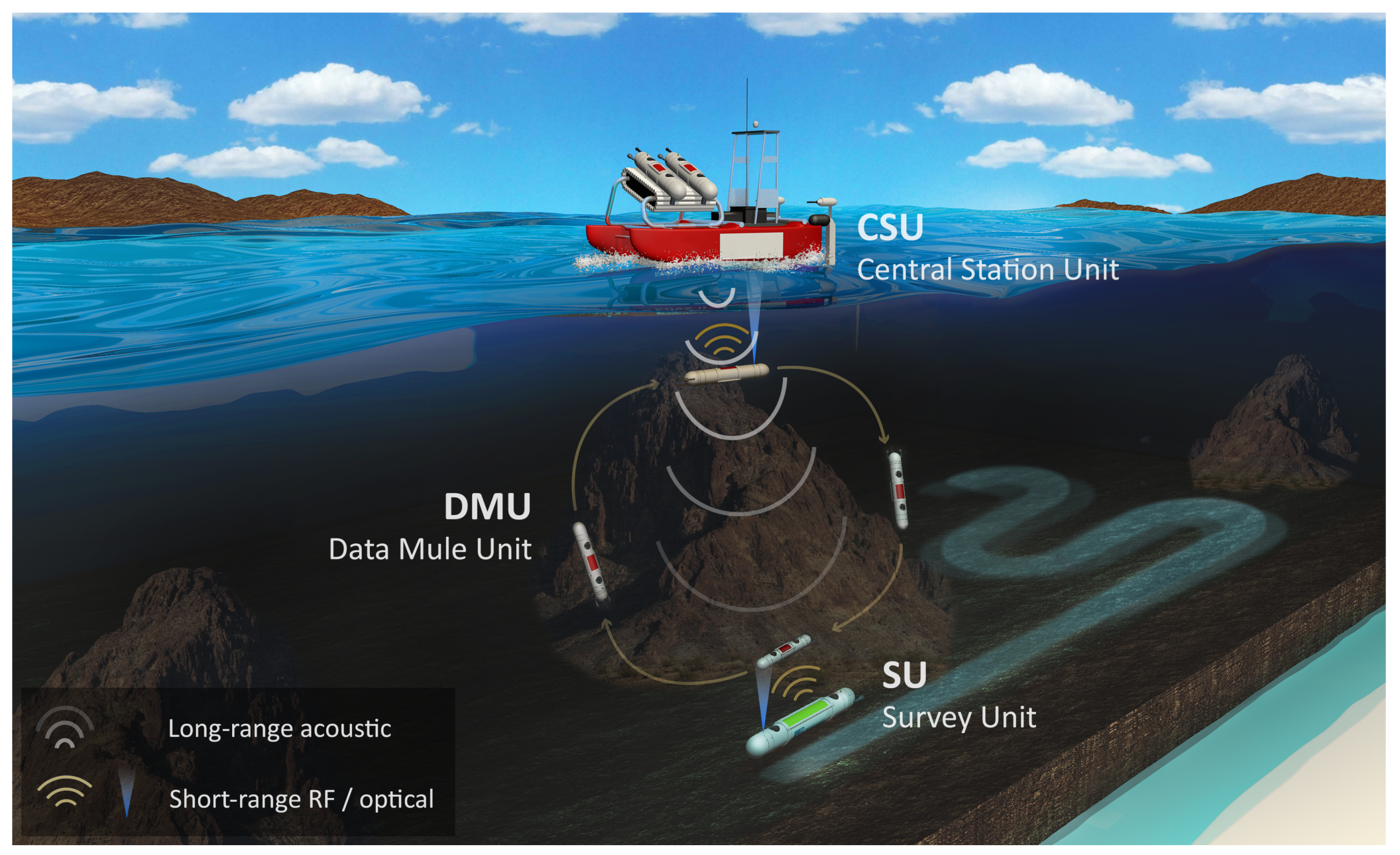
3. GROW Solution Overview
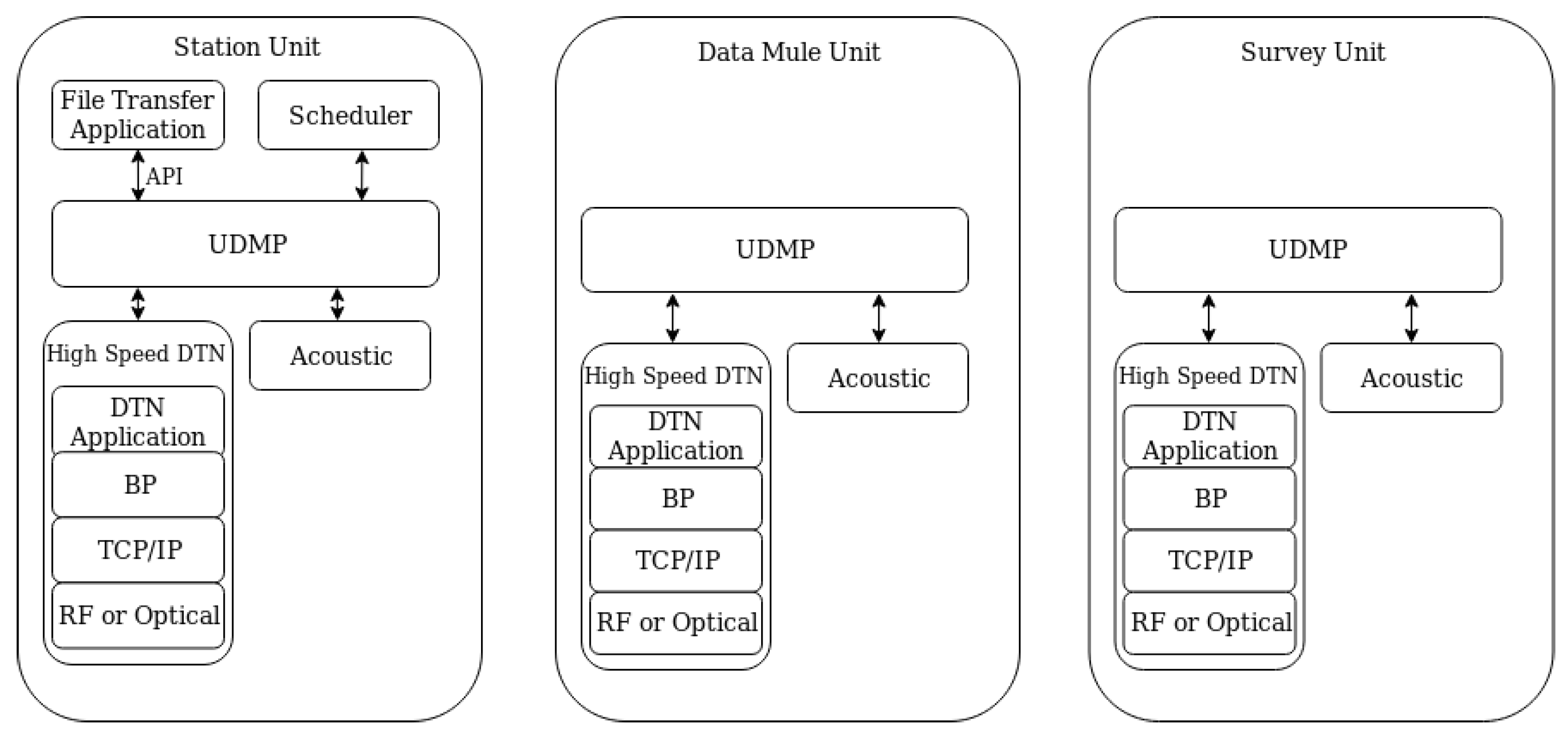
3.1. Communications Solution
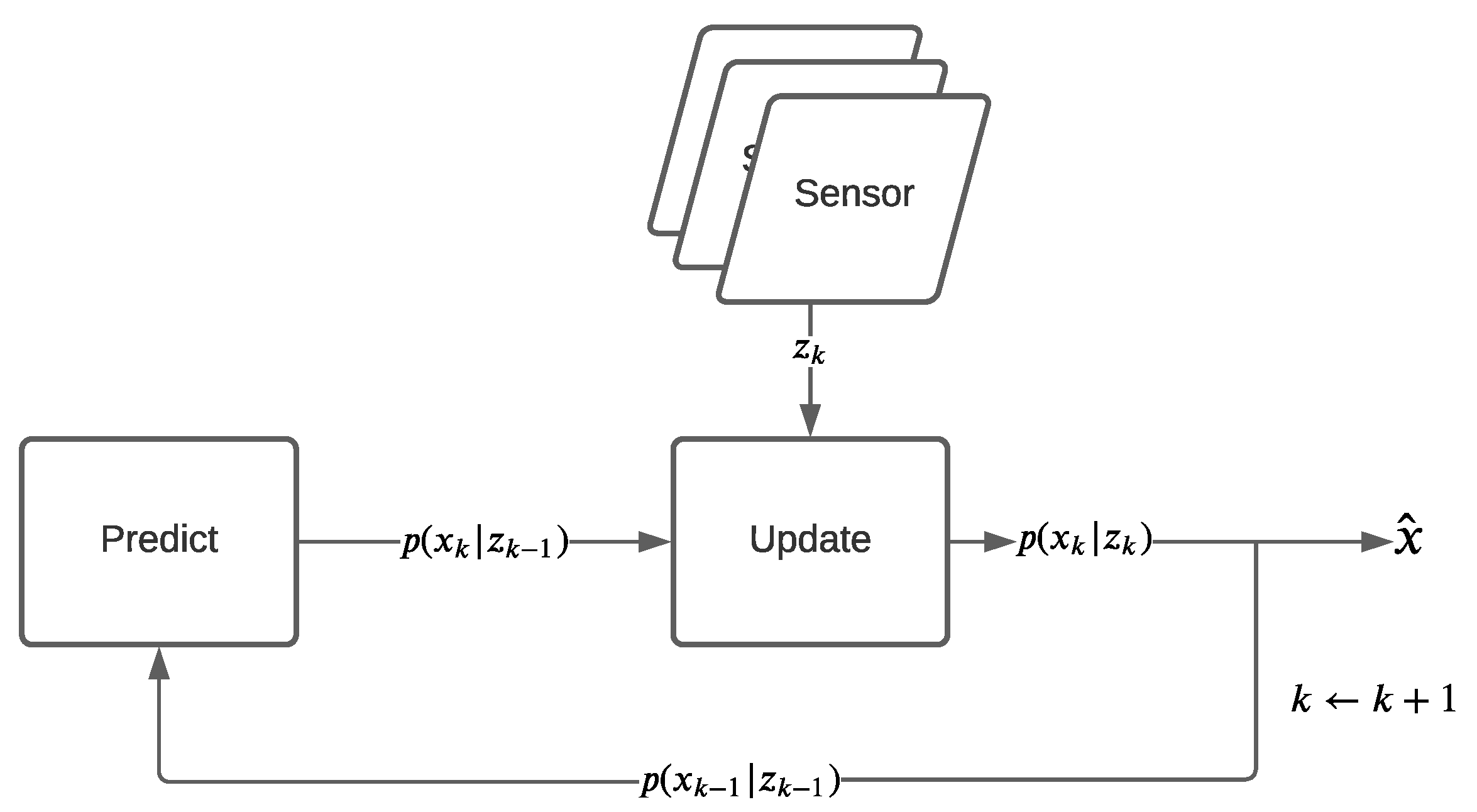
3.2. Localization Solution
- Absolute three-dimensional position—represented in Cartesian coordinates in a global frame;
- Attitude—represented in the form of a unit quaternion;
- Linear velocities—expressed on the axes of the reference frame attached to the AUV body;
- Angular velocities—expressed on the axes of the reference frame attached to the AUV body;
- Absolute three-dimensional position of the target.
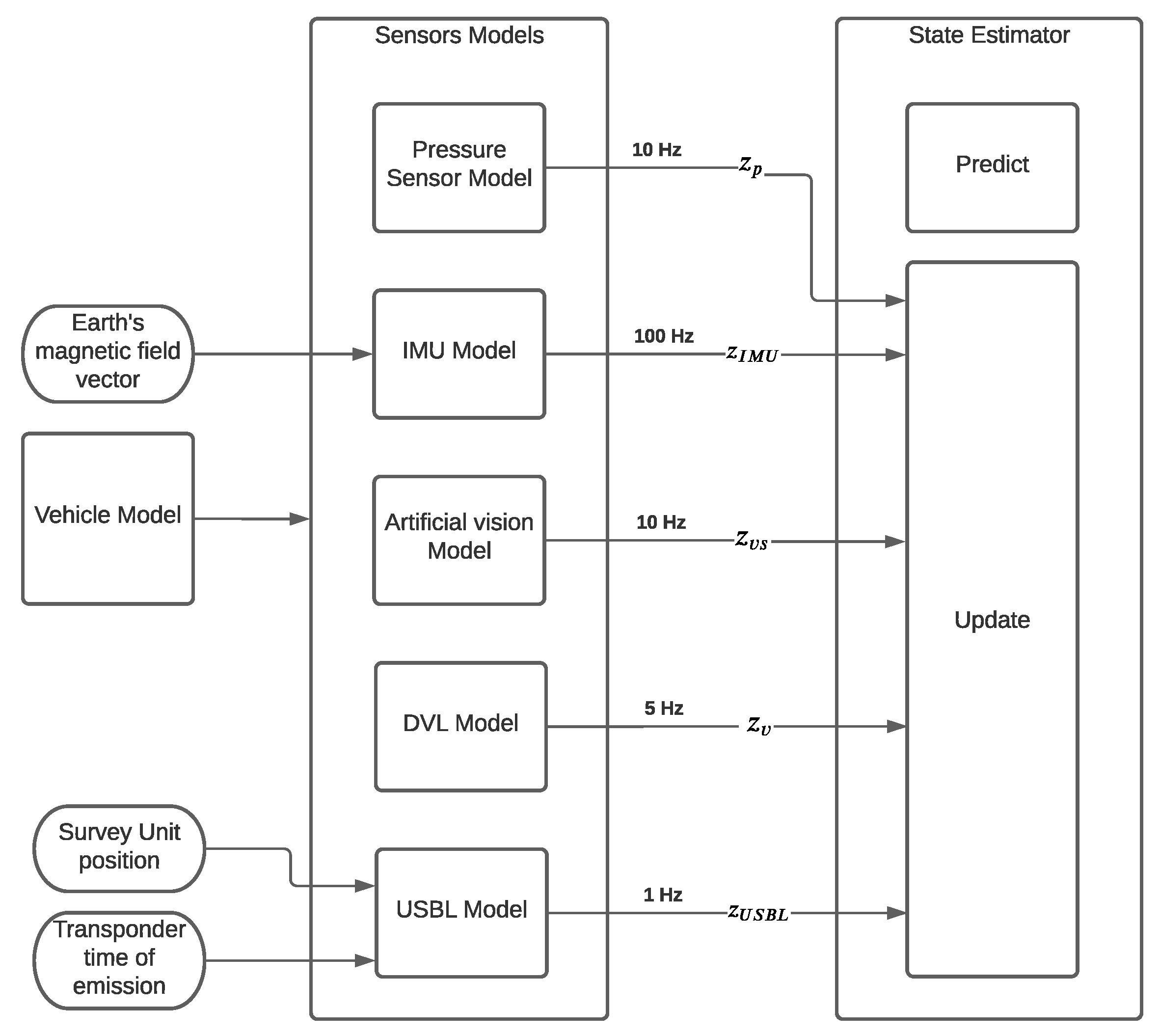
- Acoustic receivers—considering an Ultra-Short BaseLine (USBL) configuration to measure bearing and range;
- Artificial vision-based system—at shorter ranges, for more precise localization, an artificial vision-based system measures the relative position with respect to visual markers;
- Inertial Measurement Unit (IMU)—composed of a three-axes gyroscope, a three-axes magnetometer, and a three-axes accelerometer, mainly used for attitude calculation;
- Pressure sensor—a pressure sensor is used for depth measurement;
- Doppler Velocity Log—a Doppler Velocity Log (DVL) is used for measurements of three-dimensional linear velocities.
4. Simple Theoretical Model
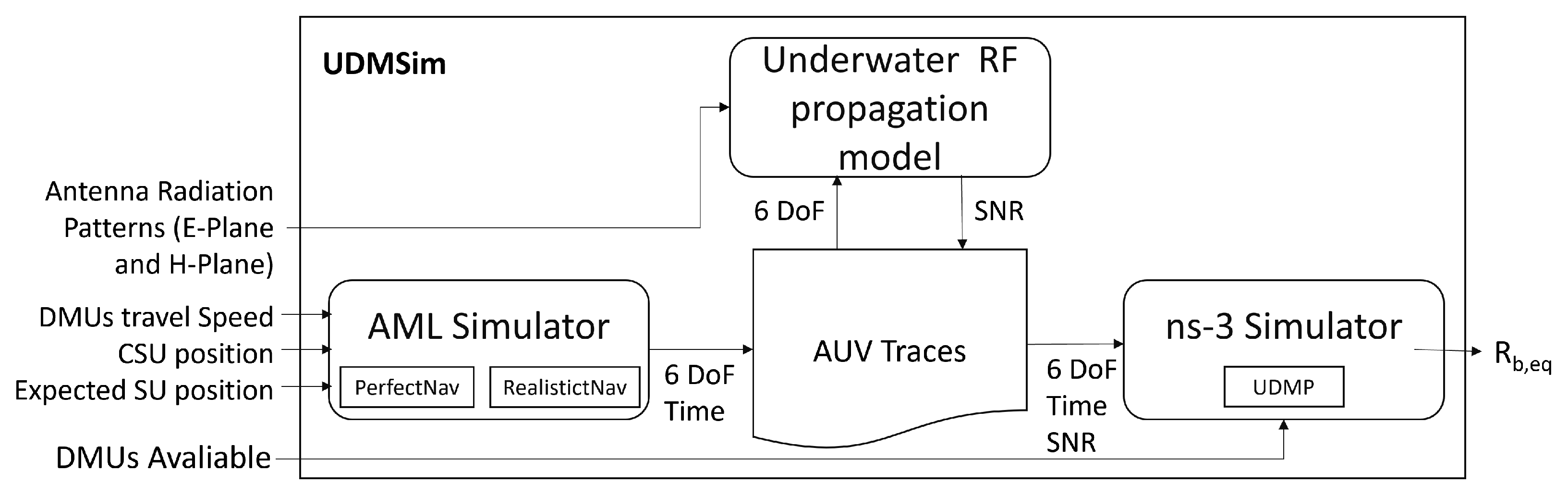
5. Underwater Data Muling Simulator (UDMSim)
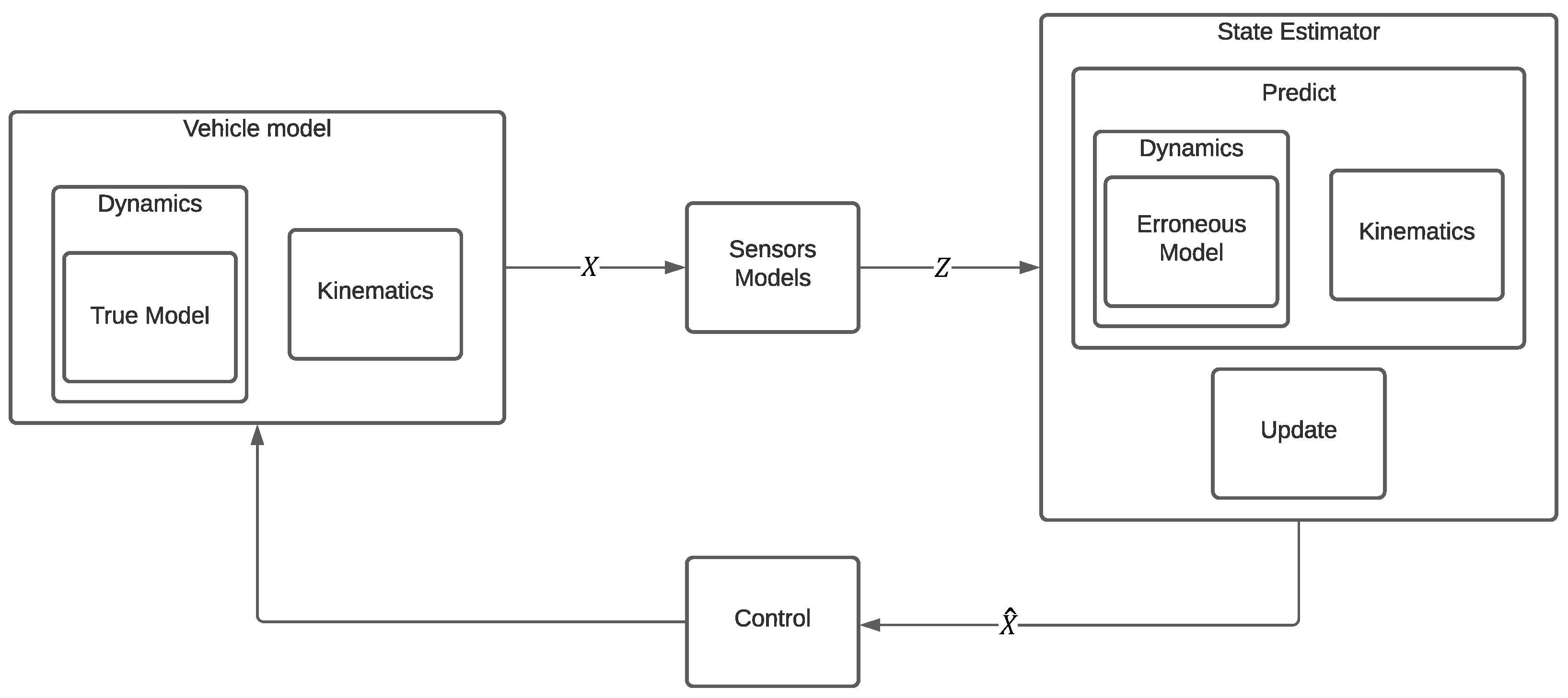
5.1. AUV Motion and Localization Simulator
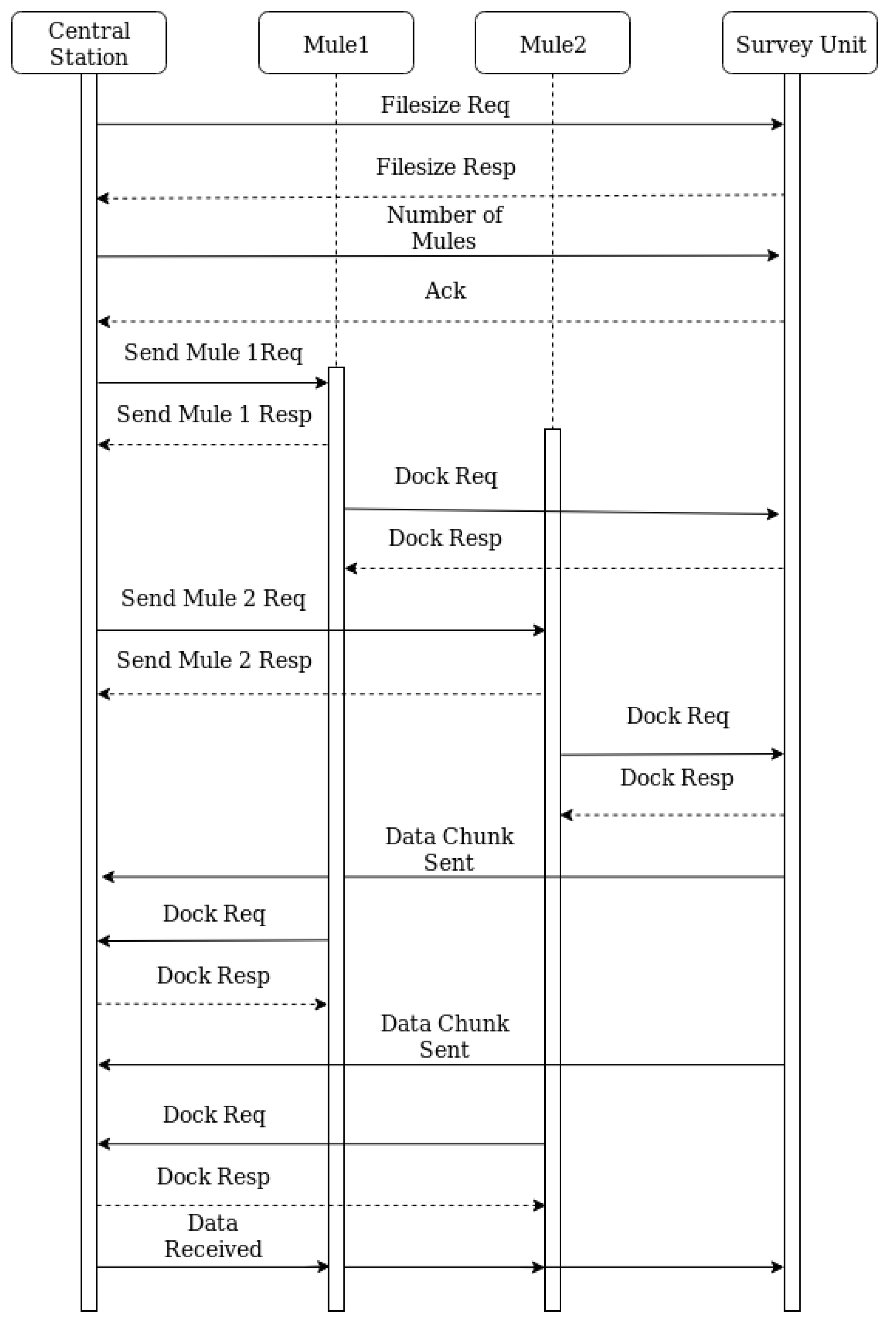
5.2. ns-3 Based Simulator
6. Evaluation Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Favali, P.; Beranzoli, L.; De Santis, A. SEAFLOOR OBSERVATORIES: A New Vision of the Earth from the Abyss; Springer Science & Business Media: New York, NY, USA, 2015. [Google Scholar]
- Sarradin, P.M.; Legrand, J.; Moreau, B.; Lanteri, N.; Cannat, M. Technical parameters, data from the COSTOF2 of the EGIM, EMSO-Azores observatory, 2017–2018. AGRIS 2018. Available online: https://www.seanoe.org/data/00455/56627/ (accessed on 6 July 2021).
- Venkatesan, R.; Tandon, A.; DAsaro, E.; Atmanand, M.A. (Eds.) Observing the Oceans in Real Time; Springer: Berlin, Germany, 2018. [Google Scholar] [CrossRef]
- Wynn, R.B.; Huvenne, V.A.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous Underwater Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef] [Green Version]
- Sendra, S.; Lloret, J.; Jimenez, J.M.; Parra, L. Underwater Acoustic Modems. IEEE Sens. J. 2016, 16, 4063–4071. [Google Scholar] [CrossRef]
- GROW Project. Available online: https://grow.inesctec.pt (accessed on 2 July 2021).
- Rahman, R.; Frater, M. 5-Delay-tolerant networks (DTNs) for underwater communications. In Advances in Delay-Tolerant Networks (DTNs); Rodrigues, J., Ed.; Woodhead Publishing: Oxford, UK, 2015; pp. 81–103. [Google Scholar] [CrossRef]
- Khabbaz, M.J.; Assi, C.M.; Fawaz, W.F. Disruption-Tolerant Networking: A Comprehensive Survey on Recent Developments and Persisting Challenges. IEEE Commun. Surv. Tutor. 2012, 14, 607–640. [Google Scholar] [CrossRef]
- Teixeira, F.B.; Moreira, N.; Campos, R.; Ricardo, M. Data Muling Approach for Long-Range Broadband Underwater Communications. In Proceedings of the 2019 International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Barcelona, Spain, 21–23 October 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Moreira, N. Data Muling for Broadband and Long Range Wireless Underwater Communications. Master’s Thesis, Faculdade de Engenharia da Universidade do Porto, Porto, Portugal, 2019. Available online: https://hdl.handle.net/10216/121806 (accessed on 6 July 2021).
- Cho, H.H.; Chen, C.Y.; Shih, T.K.; Chao, H.C. Survey on underwater delay/disruption tolerant wireless sensor network routing. IET Wirel. Sens. Syst. 2014, 4, 112–121. [Google Scholar] [CrossRef] [Green Version]
- Rahim, M.S.; Casari, P.; Guerra, F.; Zorzi, M. On the performance of delay—Tolerant routing protocols in underwater networks. In Proceedings of the OCEANS 2011 IEEE—Spain, Santander, Spain, 6–9 June 2011; pp. 1–7. [Google Scholar] [CrossRef]
- Guo, Z.; Colombi, G.; Wang, B.; Cui, J.H.; Maggiorini, D.; Rossi, G.P. Adaptive Routing in Underwater Delay/Disruption Tolerant Sensor Networks. In Proceedings of the 2008 Fifth Annual Conference on Wireless on Demand Network Systems and Services, Garmisch-Partenkirchen, Germany, 23–25 January 2008; pp. 31–39. [Google Scholar] [CrossRef]
- Hansen, J.; Fourie, D.; Kinsey, J.C.; Pontbriand, C.; Ware, J.; Farr, N.; Kaiser, C.L.; Tivey, M. Autonomous acoustic-aided optical localization for data transfer. In Proceedings of the OCEANS 2015—MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Dunbabin, M.; Corke, P.; Vasilescu, I.; Rus, D. Data muling over underwater wireless sensor networks using an autonomous underwater vehicle. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, (ICRA 2006), Orlando, FL, USA, 15–19 May 2006; pp. 2091–2098. [Google Scholar] [CrossRef] [Green Version]
- Jouhari, M.; Ibrahimi, K.; Tembine, H.; Ben-Othman, J. Underwater Wireless Sensor Networks: A Survey on Enabling Technologies, Localization Protocols, and Internet of Underwater Things. IEEE Access 2019, 7, 96879–96899. [Google Scholar] [CrossRef]
- Che, X.; Wells, I.; Dickers, G.; Kear, P.; Gong, X. Re-evaluation of RF electromagnetic communication in underwater sensor networks. IEEE Commun. Mag. 2010, 48, 143–151. [Google Scholar] [CrossRef]
- Lurton, X. An Introduction to Underwater Acoustics; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Freitas, P. Evaluation of Wi-Fi Underwater Networks in Freshwater. Master’s Thesis, Faculdade de Engenharia da Universidade do Porto, Porto, Portugal, 2014. Available online: https://repositorio-aberto.up.pt/handle/10216/75691 (accessed on 6 July 2021).
- Farr, N.; Bowen, A.; Ware, J.; Pontbriand, C.; Tivey, M. An integrated, underwater optical /acoustic communications system. In Proceedings of the OCEANS’10 IEEE SYDNEY, Sydney, Australia, 24–27 May 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Saeed, N.; Celik, A.; Al-Naffouri, T.Y.; Alouini, M.S. Underwater optical wireless communications, networking, and localization: A survey. Ad Hoc Netw. 2019, 94, 101935. [Google Scholar] [CrossRef] [Green Version]
- Kaushal, H.; Kaddoum, G. Underwater Optical Wireless Communication. IEEE Access 2016, 4, 1518–1547. [Google Scholar] [CrossRef]
- Han, S.; Noh, Y.; Liang, R.; Chen, R.; Cheng, Y.J.; Gerla, M. Evaluation of underwater optical-acoustic hybrid network. China Commun. 2014, 11, 49–59. [Google Scholar] [CrossRef]
- Cossu, G.; Corsini, R.; Khalid, A.M.; Balestrino, S.; Coppelli, A.; Caiti, A.; Ciaramella, E. Experimental demonstration of high speed underwater visible light communications. In Proceedings of the 2nd International Workshop on Optical Wireless Communications (IWOW), Newcastle Upon Tyne, UK, 21 October 2013. [Google Scholar] [CrossRef]
- Tang, S.; Dong, Y.; Zhang, X. On Link Misalignment for Underwater Wireless Optical Communications. IEEE Commun. Lett. 2012, 16, 1688–1690. [Google Scholar] [CrossRef]
- Brundage, H. Designing a Wireless Underwater Optical Communication System. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2010. Available online: http://hdl.handle.net/1721.1/57699 (accessed on 6 July 2021).
- SA Photonic Neptune. Available online: http://www.saphotonics.com/wp-content/uploads/2017/02/Neptune-Datasheet.pdf (accessed on 2 July 2021).
- Teixeira, F.; Freitas, P.; Pessoa, L.; Campos, R.; Ricardo, M. Evaluation of IEEE 802.11 Underwater Networks Operating at 700 MHz, 2.4 GHz and 5 GHz. In Proceedings of the International Conference on Underwater Networks & Systems—WUWNET, Rome, Italy, 12–14 November 2014; ACM Press: New York, NY, USA, 2014. [Google Scholar] [CrossRef]
- Teixeira, F.; Campos, R.; Ricardo, M. IEEE 802.11 Rate Adaptation Algorithms in Underwater Environment. In Proceedings of the 10th International Conference on Underwater Networks & Systems, WUWNET ’15, Arlington, VA, USA, 22–24 October 2015; Association for Computing Machinery: New York, NY, USA, 2015. [Google Scholar] [CrossRef]
- Teixeira, F.; Santos, J.; Pessoa, L.; Pereira, M.; Campos, R.; Ricardo, M. Evaluation of Underwater IEEE 802.11 Networks at VHF and UHF Frequency Bands using Software Defined Radios. In Proceedings of the 10th International Conference on Underwater Networks & Systems—WUWNET, Arlington, VA, USA, 22–24 October 2015; ACM Press: New York, NY, USA, 2015. [Google Scholar] [CrossRef]
- Campagnaro, F.; Francescon, R.; Casari, P.; Diamant, R.; Zorzi, M. Multimodal underwater networks: Recent advances and a look ahead. In Proceedings of the International Conference on Underwater Networks & Systems, Halifax, NS, Canada, 6–8 November 2017; pp. 1–8. [Google Scholar]
- Burleigh, S.; Hooke, A.; Torgerson, L.; Durst, R.; Scott, K.; Fall, K.; Weiss, H. RFC 4838, Delay-Tolerant Networking Architecture. 2007. Available online: https://datatracker.ietf.org/doc/html/rfc4838/ (accessed on 6 July 2021).
- Scott, K.; Burleigh, S. RFC 5050, Bundle Protocol Specification. 2007. Available online: https://datatracker.ietf.org/doc/html/rfc5050 (accessed on 6 July 2021).
- Kebkal, V.; Kebkal, K.; Kebkal, O.; Komar, M. Experimental results of Delay-Tolerant Networking in underwater acoustic channel using S2C modems with embedded sandbox on-board. In Proceedings of the OCEANS 2015—Genova, Genova, Italy, 18–21 May 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Su, Y.; Fan, R.; Jin, Z. ORIT: A Transport Layer Protocol Design for Underwater DTN Sensor Networks. IEEE Access 2019, 7, 69592–69603. [Google Scholar] [CrossRef]
- Soares, L. Wireless Underwater Broadband and Long Range Communications using Underwater Drones as Data Mules. Master’s Thesis, University of Porto, Porto, Portugal, 2017. Available online: https://hdl.handle.net/10216/106809 (accessed on 6 July 2021).
- Loureiro, J.P. High Definition Wireless Video Streaming using Underwater Data Mules. Master’s Thesis, Faculdade de Engenharia da Universidade do Porto, Porto, Portugal, 2021. Available online: https://repositorio-aberto.up.pt/handle/10216/133682 (accessed on 6 July 2021).
- Doniec, M.; Topor, I.; Chitre, M.; Rus, D. Autonomous, Localization-Free Underwater Data Muling Using Acoustic and Optical Communication. In Experimental Robotics: The 13th International Symposium on Experimental Robotics; Desai, J.P., Dudek, G., Khatib, O., Kumar, V., Eds.; Springer International Publishing: Heidelberg, Germany, 2013; pp. 841–857. [Google Scholar] [CrossRef] [Green Version]
- Raspante, F. Underwater mobile docking of autonomous underwater vehicles. In Proceedings of the 2012 Oceans, Hampton Roads, VA, USA, 14–19 October 2012; pp. 14–19. [Google Scholar] [CrossRef]
- Zwolak, K.; Wigley, R.; Bohan, A.; Zarayskaya, Y.; Bazhenova, E.; Dorshow, W.; Sumiyoshi, M.; Sattiabaruth, S.; Roperez, J.; Proctor, A.; et al. The Autonomous Underwater Vehicle Integrated with the Unmanned Surface Vessel Mapping the Southern Ionian Sea. The Winning Technology Solution of the Shell Ocean Discovery XPRIZE. Remote Sens. 2020, 12, 1344. [Google Scholar] [CrossRef] [Green Version]
- Chan, C.Y.; Motani, M. An Integrated Energy Efficient Data Retrieval Protocol for Underwater Delay Tolerant Networks. In Proceedings of the OCEANS 2007—Europe, Aberdeen, UK, 18–21 June 2007; pp. 1–6. [Google Scholar] [CrossRef]
- Magistretti, E.; Kong, J.; Lee, U.; Gerla, M.; Bellavista, P.; Corradi, A. A Mobile Delay-Tolerant Approach to Long-Term Energy-Efficient Underwater Sensor Networking. In Proceedings of the 2007 IEEE Wireless Communications and Networking Conference, Hong Kong, China, 11–15 March 2007; pp. 2866–2871. [Google Scholar] [CrossRef]
- Morgenroth, J.; Pögel, T.; Wolf, L. Live-Streaming in Delay Tolerant Networks. In Proceedings of the 6th ACM Workshop on Challenged Networks, CHANTS ’11, Las Vegas, NV, USA, 23 September 2011; Association for Computing Machinery: New York, NY, USA, 2011; pp. 67–68. [Google Scholar] [CrossRef] [Green Version]
- Lenas, S.A.; Burleigh, S.C.; Tsaoussidis, V. Reliable Data Streaming over Delay Tolerant Networks. In International Conference on Wired/Wireless Internet Communication; Koucheryavy, Y., Mamatas, L., Matta, I., Tsaoussidis, V., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 358–365. [Google Scholar] [CrossRef]
- Lenas, S.A.; Burleigh, S.C.; Tsaoussidis, V. Bundle streaming service: Design, implementation and performance evaluation. Trans. Emerg. Telecommun. Technol. 2015, 26, 905–917. [Google Scholar] [CrossRef]
- Loureiro, J.P.; Teixeira, F.B.; Campos, R. Underwater High Definition Wireless Video Streaming using Data Muling. In Proceedings of the 2021 Joint EuCNC & 6G Summit, Porto, Portugal, 8–11 June 2021. [Google Scholar]
- Page, B.R.; Mahmoudian, N. AUV Docking and Recovery with USV: An Experimental Study. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Palomeras, N.; Peñalver, A.; Massot-Campos, M.; Negre, P.L.; Fernández, J.J.; Ridao, P.; Sanz, P.J.; Oliver-Codina, G. I-AUV Docking and Panel Intervention at Sea. Sensors 2016, 16, 1673. [Google Scholar] [CrossRef] [PubMed]
- Ferreira, B.; Matos, A.; Cruz, N.; Pinto, M. Modeling and control of the MARES autonomous underwater vehicle. Mar. Technol. Soc. J. 2010, 44, 19–36. [Google Scholar] [CrossRef]
- Cruz, N.A.; Matos, A.C. The MARES AUV, a Modular Autonomous Robot for Environment Sampling. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Fossen, T.I. Guidance and Control of Ocean Vehicles. Ph.D. Thesis, University of Trondheim, Trondheim, Norway, 1999. Available online: http://resolver.tudelft.nl/uuid:2ea31f56-6db4-475b-afe6-d146cebbd7e9 (accessed on 6 July 2021).
- Teixeira, F.B.; Moreira, N.; Abreu, N.; Ferreira, B.; Ricardo, M.; Campos, R. UDMSim: A Simulation Platform for Underwater Data Muling Communications. In Proceedings of the 2020 16th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Thessaloniki, Greece, 12–14 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Nsnam. ns3—A Discrete-Event Network Simulator for Internet Systems. Available online: http://www.nsnam.org (accessed on 6 July 2021).
- Fontes, H.; Campos, R.; Ricardo, M. A Trace-Based Ns-3 Simulation Approach for Perpetuating Real-World Experiments. In Proceedings of the Workshop on Ns-3; Association for Computing, WNS3 ’17, Porto, Portugal, 13–14 June 2017; Machinery: New York, NY, USA, 2017; pp. 118–124. [Google Scholar] [CrossRef]
- Inácio, S.I.; Pereira, M.R.; Santos, H.M.; Pessoa, L.M.; Teixeira, F.B.; Lopes, M.J.; Aboderin, O.; Salgado, H.M. Dipole antenna for underwater radio communications. In Proceedings of the 2016 IEEE Third Underwater Communications and Networking Conference (UComms), Lerici, Italy, 30 August–1 September 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Inácio, S.I.; Pereira, M.R.; Santos, H.M.; Pessoa, L.M.; Teixeira, F.B.; Lopes, M.J.; Aboderin, O.; Salgado, H.M. Antenna design for underwater radio communications. In Proceedings of the OCEANS 2016—Shanghai, Shanghai, China, 10–13 April 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- IBRDTN. Available online: https://github.com/ibrdtn/ibrdtn (accessed on 6 July 2021).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Underwater Acoustic Modem | Modulation | Carrier Frequency | Bandwidth | Data Rate | TX Power Consumption | RX Power Consumption | Idle Power Consumption | Max. Distance |
|---|---|---|---|---|---|---|---|---|
| DEVICES DEVELOPED BY RESEARCH GROUPS | ||||||||
| A. Sánchez et al. | FSK | 320 Hz and 10 kHz | 1 kHz | 96 bps and 2400 bps | 12 mW | 24 mW | 3 W | 100 m |
| N. Farr et al. | n/a | n/a | n/a | 1–10 Mbps | n/a | n/a | n/a | 100 m |
| B. Benson et al. | FSK | 35 kHz | 6 kHz | 200 bps | 750 mW | n/a | 35 mW | 350 m |
| A. Sánchez et al. | FSK | 85 kHz | n/a | 1 kbps | 108 mW | 24 mW | 8.1 W | 240 m |
| E. M. Sözer et al. | n/a | 9–14 kHz | 75 kHz | 1.2 kbps | n/a | n/a | n/a | 2000 m |
| N. Nowsheen et al. | BPSK | 80 kHz | n/a | 80 kbps | n/a | n/a | n/a | 50 m |
| I. Vasilescu et al. | FSK | 30 kHz | n/a | 300 bps | n/a | n/a | n/a | 400 m |
| L. Wu et al. | FSK | 9 kHz | n/a | 1900 bps | n/a | n/a | n/a | 200 m |
| COMMERCIAL DEVICES | ||||||||
| Aquatec AQUAModem 1000 | n/a | 9.75 kHz | 4.5 kHz | 2000 bps | 20 W | 0.6 W | 1 mW | 5000 m |
| DSPComm AquaComm Marlin | n/a | 23 kHz | 14 kHz | 480 bps | 1.8 W | 0.252 W | 1.8 mW | 1000 m |
| DSPComm AquaComm Mako | n/a | 23 kHz | 14 kHz | 240 bps | 1.8 W | 0.252 W | 1.8 mW | 100 m |
| DSPComm AquaComm Orca | n/a | 14 kHz | 100 kHz | 100 bps | 0.252 W | 1.8 W | 25.2 mW | 3000 m |
| Desert Star Systems SAM-1 | n/a | 37.5 kHz | 9 kHz | 154 bps | 32 W | 0.168 W | n/a | 1000 m |
| EvoLogics S2CR 48/78 USBL | n/a | 48–78 kHz | 30 kHz | 31,200 bps | 18 W | 1.1 W | 2.5 mW | 1000 m |
| EvoLogics S2CR 40/80 USBL | n/a | 38–64 kHz | 26 kHz | 27,700 bps | 40 W | 1.1 W | 2.5 mW | 1000 m |
| EvoLogics S2CR 18/34 WiSE | n/a | 18–34 kHz | 16 kHz | 13,900 bps | 35 W | 1.3 W | 2.5 mW | 3500 m |
| EvoLogics S2CR 12/24 USBL | n/a | 13–24 kHz | 11 kHz | 9200 bps | 15 W | 1.1 W | 2.5 mW | 6000 m |
| EvoLogics S2CR 7/17 USBL | n/a | 7–17 kHz | 10 kHz | 6900 bps | 40 W | 1.1 W | 2.5 mW | 8000 m |
| LinkQuest UWM1000 | n/a | 35,695 Hz | 17.85 kHz | 17,800 bps | 1 W | 0.75 W | 8 mW | 3500 m |
| LinkQuest UWM2000 | n/a | 35,695 Hz | 17.85 kHz | 17,800 bps | 2 W | 0.8 W | 8 mW | 1500 m |
| LinkQuest UWM2000H | n/a | 35,695 Hz | 17.85 kHz | 17,800 bps | 2 W | 0.8 W | 8 mW | 1500 m |
| LinkQuest UWM2200 | n/a | 71.4 kHz | 35.7 kHz | 35,700 bps | 6 W | 1 W | 12 mW | 1000 m |
| LinkQuest UWM3000 | n/a | 10 kHz | 5 kHz | 5000 bps | 12 W | 0.8 W | 8 mW | 3000 m |
| LinkQUest UWM3000H | n/a | 10 kHz | 5 kHz | 5000 bps | 12 W | 0.8 W | 8 mW | 3000 m |
| LinkQuest UWM4000 | n/a | 17 kHz | 8.5 kHz | 8500 bps | 7 W | 0.8 W | 8 mW | 4000 m |
| LinkQuest UWM10000 | n/a | 10 kHz | 5 kHz | 5000 bps | 40 W | 0.8 W | 9 mW | 1000 m |
| Teledyne Benthos Atm9xx | PSK | 11.5 kHz 18.5 kHz 24.5 kHz | 5 kHz | 15,360 bps | 20 W | 0.768 W | 16.8 mW | 6000 m |
| Teledyne Benthos Atm9xx | MFSK | 11.5 kHz 18.5 kHz 24.5 kHz | 5 kHz | 2400 bps | 20 W | 0.768 W | 16.8 mW | 6000 m |
| Teledyne Benthos Atm88x | PSK | 11.5 kHz 18.5 kHz | 5 kHz | 15,360 bps | 84 W | 0.756 W | 16.8 mW | 6000 m |
| Teledyne Benthos Atm88x | FSK | 11.5 kHz 18.5 kHz | 5 kHz | 2400 bps | 84 W | 0.756 W | 16.8 mW | 6000 m |
| TriTech MicronModem | n/a | 22 kHz | 4 kHz | 40 bps | 7.92 W | 0.72 W | n/a | 500 m |
| uComm Underwter Acoustic Modem | n/a | 26 kHz | n/a | 9000 bps | 40 W | 60 mW | 3 mW | 3000 m |
| AM-OFDM-S | OFDM | 21–27 kHz | n/a | 1600 bps | 5–20 W | 0.7 W | 0.13 mW | 4000 m |
| MATS 3G 12 KHZ | n/a | 10–15 kHz | n/a | Up to 7400 bps | 75 W | 0.6 W | 40 mW | 15 km |
| GPM 3000 Acoustic Modem | DSSS | n/a | n/a | Up to 1200 bps | 300 W | 1.8 W | 0.08 W | 25 km |
| Sensor | Update Rate (HZ) | Measurement Bias | Measurement Variance |
|---|---|---|---|
| Pressure | 10 | 0 | |
| Accelerometer | 100 | ||
| Gyroscope | 100 | ||
| Magnetometer | 100 | 0 | |
| USBL | 1 | 0 | |
| Artificial Vision | 10 | 0 | |
| DVL | 5 | 0 |
| Parameter | Value |
|---|---|
| Undocking time () | 1 s |
| Docking time () | 17 s |
| Data Mule Unit travel speed | 1.05 m/s |
| Number of Data Mule Units available | 1–2 |
| Average short-range link throughput (20 MHz channel) | 27 Mbit/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Teixeira, F.B.; Ferreira, B.M.; Moreira, N.; Abreu, N.; Villa, M.; Loureiro, J.P.; Cruz, N.A.; Alves, J.C.; Ricardo, M.; Campos, R. A Novel Simulation Platform for Underwater Data Muling Communications Using Autonomous Underwater Vehicles. Computers 2021, 10, 119. https://0-doi-org.brum.beds.ac.uk/10.3390/computers10100119
Teixeira FB, Ferreira BM, Moreira N, Abreu N, Villa M, Loureiro JP, Cruz NA, Alves JC, Ricardo M, Campos R. A Novel Simulation Platform for Underwater Data Muling Communications Using Autonomous Underwater Vehicles. Computers. 2021; 10(10):119. https://0-doi-org.brum.beds.ac.uk/10.3390/computers10100119
Chicago/Turabian StyleTeixeira, Filipe B., Bruno M. Ferreira, Nuno Moreira, Nuno Abreu, Murillo Villa, João P. Loureiro, Nuno A. Cruz, José C. Alves, Manuel Ricardo, and Rui Campos. 2021. "A Novel Simulation Platform for Underwater Data Muling Communications Using Autonomous Underwater Vehicles" Computers 10, no. 10: 119. https://0-doi-org.brum.beds.ac.uk/10.3390/computers10100119