Effect of Row Cleaner Operational Settings on Crop Residue Translocation in Strip-Tillage



1
Institute of Agricultural Engineering and Safety, Vytautas Magnus University, Akademija, Kaunas District LT-53361, Lithuania
2
Institute of Agroecosystems and Soil Sciences, Vytautas Magnus University, Akademija, Kaunas District LT-53361, Lithuania
*
Author to whom correspondence should be addressed.
Agronomy 2019, 9(5), 247; https://0-doi-org.brum.beds.ac.uk/10.3390/agronomy9050247
Submission received: 4 April 2019
/
Revised: 30 April 2019
/
Accepted: 3 May 2019
/
Published: 18 May 2019
(This article belongs to the Section Agricultural Biosystem and Biological Engineering)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Through field experiments and empirical analysis methods, this study determined the dependence of plant residue removal on the row cleaner’s settings in strip-tillage. The main research object of this study is row cleaners. By changing the slip angles (10, 15, and 22.5°), the gap between row cleaner discs in parallel (165, 180, and 195 mm), and the driving speed (1.3, 1.9, 2.5, and 3.1 m s−1), we determined what percentage of wheat residue was removed from the strip on the surface of the soil and what distance it was moved. The percentage of removed plant residue was determined by evaluating the differences between the masses of the plant residue taken from non-removed and removed strips. Empirical analysis of the results of the field experiments showed that both the amount of the removed plant residue and the distance it is moved to were the best when the slip angle was 15°, the gap between the discs of row cleaner was 180 mm, and the driving speed was 2.5 m s−1. With these parameters, up to three-quarters of the plant residue was removed from the soil surface of the strip, which was relocated 308 mm from the middle of the strip. If the slip angle and the driving speed are increased further, even more plant residue can be removed; however, if the plant residue is relocated too far away, it may fall into the zone of the adjacent strip.
1. Introduction
Tillage is a very important and expensive technological process involved in crop production [1,2]. During soil cultivation, important processes of change are controlled in terms of the physical/mechanical and other characteristics of soil [3,4]. Recent trends are very clear: Traditional soil cultivation using deep ploughing is becoming less popular, while areas of conservation soil are increasing, on average by seven million hectares (ha) worldwide each year [5]. Lithuania and the other Baltic States are no exception, and climate change, soil degradation, preservation of moisture, and labour time and energy savings are very important motivations for improving tillage [6,7,8,9]. The soil’s favourable physical and hydraulic conditions in no-till systems depend on the inclusion of additional practices, such as cover crops, rotational cropping and organic amendments [10,11,12]. Conservation tillage processes reduce the negative effect of tillage machines on soil properties including the erosion and compaction of soil layers, which results in the preservation of more natural water infiltration and better conditions for the penetration of crop roots [13,14,15]. By introducing conservation soil cultivation technologies, plant residue can be utilised as fertilizers and to protect soil from erosion, and fuel and crop management costs will decrease [16,17,18].
Conservation soil cultivation technologies have their advantages, but they also have some drawbacks. Most of the problems, especially in the use of conservation technology, arise from plant residue on the soil surface. When working on a soil that is abundant in plant residue, coulters of cultivation and seeding machines will often clog, the quality of seedbed preparation will decline, and working time and energy consumption will increase [9,19].
Strip-tillage is a technology that combines conservation tillage, when the entire surface of the soil is cultivated, with the positive aspects of direct sowing technology. Experiments by Al-Kaisi et al. [20] show that the use of strip-tillage over three years increased the organic matter in the soil by approximately 11.4% compared to soil that was ploughed. The same authors also found similar results in determining the amount of organic nitrogen in the soil. Moreover, soil temperature and humidity are significantly influenced by strip-tillage. Scientists from different countries have published similar conclusions: That strip-tillage allows for a faster increase in soil temperature and an acceleration of seed germination, and ensures more favourable plant growth conditions [21,22,23,24,25]. Celik et al. [26] analysed the influence of the strip width on soil moisture, seed germination and yield. They found that soil moisture increased as the strip width decreased. A strip width of 22.5 cm preserved more moisture at 0–10 cm depth in comparison with 30 and 37.5 cm strip widths. Plant residue between the strips reduced water evaporation from the soil.
Strip-tillage enables more fuel savings when compared with conventional and minimum tillage technologies, because only a certain part of the soil surface is cultivated, not the entire surface [22,27]. In evaluating the influence of strip-tillage on yield, the results of different researchers show that the yield in maize and sugar beet is similar to that of other cultivation technologies [27,28,29].
Soil strips can be cultivated for either active or passive parts of soil tillage machines [30]. Cutting blades, row cleaners, disc coulters, disc plates and rollers are examples of passive parts that rotate due to contact with the soil surface [31]. The intensity of tillage depends on the type, geometry, layout and technological parameters (working width, depth, slip angle) of the working parts of the strip-tillage machines, as well as their driving speed [32,33,34].
In the technological process of strip-tillage, row cleaners perform one of the most important functions, i.e., removing plant residue from the strip. Their purpose is to remove plant residue from the surface of the strips, in which the soil is prepared by other working parts of the machine, for plant sowing. Row cleaners in the form of discs are most commonly used because the discs work without becoming clogged with plant residue, and are better at cleaning residue off the strips. The settings of the row cleaners determine the width of the strip and the distance of the plant residue relocation, as well as the fuel consumption and the CO2 emissions from the agricultural machinery [8,9]. On tillage machines, row cleaners can be mounted both in front of and behind the disc coulters that disturb the soil [9,35]. However, approximately 4% more plant residue can be incorporated into the soil when the row cleaners are mounted behind the disc coulters [36]. Our experiments allowed us to determine which row cleaner parameters of the strip-tillage machine were the most suitable, depending on both the driving speed, and which were the best for the seedbed preparation. One of the most important agrotechnical requirements is that plant residue should not be relocated too far away, i.e., no further than the centre of the non-tilled soil surface between the strips. Sometimes plant residue can be relocated too far away, i.e., onto an adjacent tilled strip. In such a case, excess energy would be used, and the quality of the seedbed preparation would decrease.
In the course of research into soil tillage technological processes, it is necessary to carry out multiple field experiments that require considerable time and effort. Field experiments are often dependent on many factors that influence the optimal values in technological processes. Therefore, in addition to field experiments, empirical analysis methods can be applied, which allow for the determination of various indicators more quickly, depending on the parameters chosen. Researchers in different countries have carried out three-factor experimental studies and conducted empirical analyses for the determination of optimal parameters for different technological processes. Ozereljev (2007) [37] substantiated disc cutters for cutting stems of raspberries, Pozdeev (2007) [38] determined the optimal parameters for potato sorting, and Kharchenko (2008) [39] determined the optimal parameters for sunflower oil purification. Požėlienė and Lynikienė (2003) [40] determined the influence of sorting on seed germination. There is a lack of field experiments and empirical analyses that explore the working parts of the strip-tillage machines. In particular, there is a lack of studies on the interaction of row cleaners with plant residue that would allow assessment of the effect of the settings of row cleaners on the amount of residue that is removed [41].
During the technological process of strip-tillage, row cleaners remove plant residue from the strip area with their teeth. From evaluating the experiments done by other scientists, it is known that the disc-shaped working parts, when rotating, throw soil fragments different distances depending on the driving speed [35,42]. By taking this into account, our main objective is to determine the effect of the settings of the row cleaners on the relocation of plant residue by taking advantage of field experiments and empirical analysis methods. This manuscript is a continuation of our previously published article [9] and completes the research results. We performed a comprehensive study of the theoretical substantiation of the design of disc row cleaners for strip-tillage and strip width through experiments on the amount of plant residue removed from the strip and the distance plant residue is moved from the centre of the strip, the compilation of multiple regression models, and a comparative analysis of the empirical and experimental results. Our study was divided into two parts. The first part was presented in our previous article, which described the theoretical substantiation of strip width and the interaction of disc row cleaner with the soil. The theoretical and experimental research results on the influence of row cleaners’ technological parameters (slip angle, gap and diameter of row cleaner discs) on the cleaned strip width were presented. In addition, the influence of the row cleaner technological parameters on the distance of plant residue removal was investigated and experimental results were presented. For the second part of the research, presented in this paper, we describe new experimental results that show the influence of row cleaner parameters on plant residue removal from the strip. According to the new experimental data on the amount of removed plant residue, and the experimental data from the previous paper (the distance the plant residue is moved from the strip centre), we constructed multiple regression models, which show the change in removed plant residue from the strip and the distance the plant residue is moved from the centre of the strip, depending on the more technological parameters.
Hypothesis: When setting agrotechnical requirements that will apply to different work conditions, the plant residue cleaning process can be managed by changing the technological parameters of the row cleaners (slip angle, gap between discs and driving speed) in strip-tillage.
2. Materials and Methods
2.1. Description of the Experimental Site
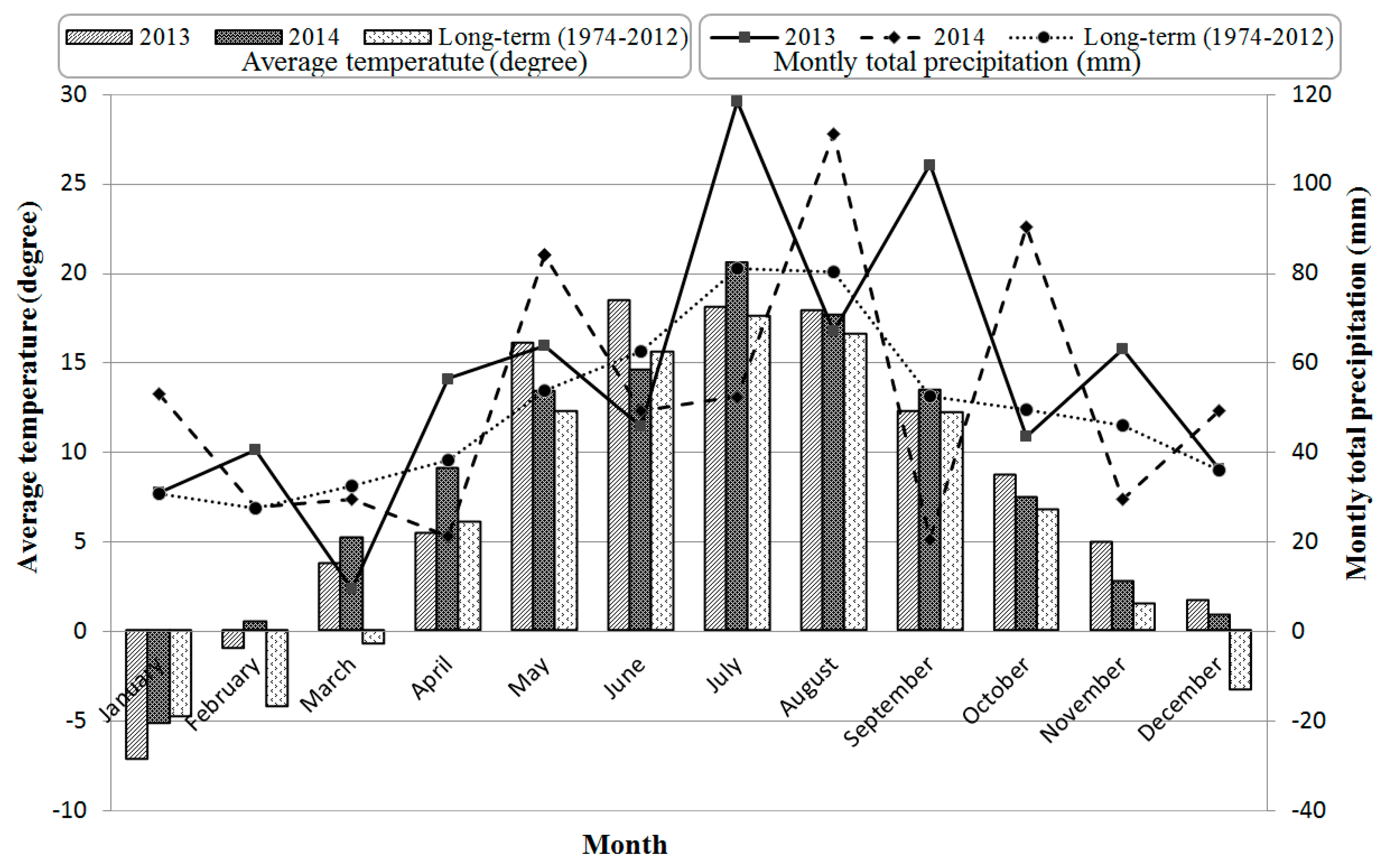
Field experiments were performed in 2013–2014 at the Experimental Station of Vytautas Magnus University, which is located in the middle of Lithuania (54°52′ N, 23°49′ E). According to the Köppen‒Geiger climate classification, the location of the field experiment has a humid continental climate (Dfb) [43]. Meteorological indices of the experimental years are presented in Figure 1. Data were obtained from the Kaunas Meteorological Station, which is situated next to the Experimental Station.
The research was carried out in soil in which uncultivated stubble was left after the harvesting of spring wheat (Triticum aestivum L.). The experiment was conducted with naturally existing field plant residue after harvest. Plant residue was chopped and spread with the rotating spreader mechanism of a combine harvester during the harvesting process. For the experiment the plot combine Wintersteiger Delta (Wintersteiger AG, Ried, Austria) was used with a working width of 2 m. The length of the spring wheat residue was approximately 10 cm, moisture content −25 ± 3%, and the amount on the soil surface was 3700 ± 402 kg ha−1. Measurements of plant residue length were taken at five different random areas, with five replications, using a precise measuring tape. The soil at the experimental site, according to the World Reference Base for Soil Resources (WRB) 2014, was Eutric Endogleyic Planosol (Drainic). Soil moisture at a depth of 20 cm was approximately 17%, and the hardness was approximately 1.0 MPa. It was measured by an electronic penetrologger manufactured by Eijkelkamp (Giesbeek, The Netherlands). All measurements were performed in five replications.
2.2. Experimental Settings
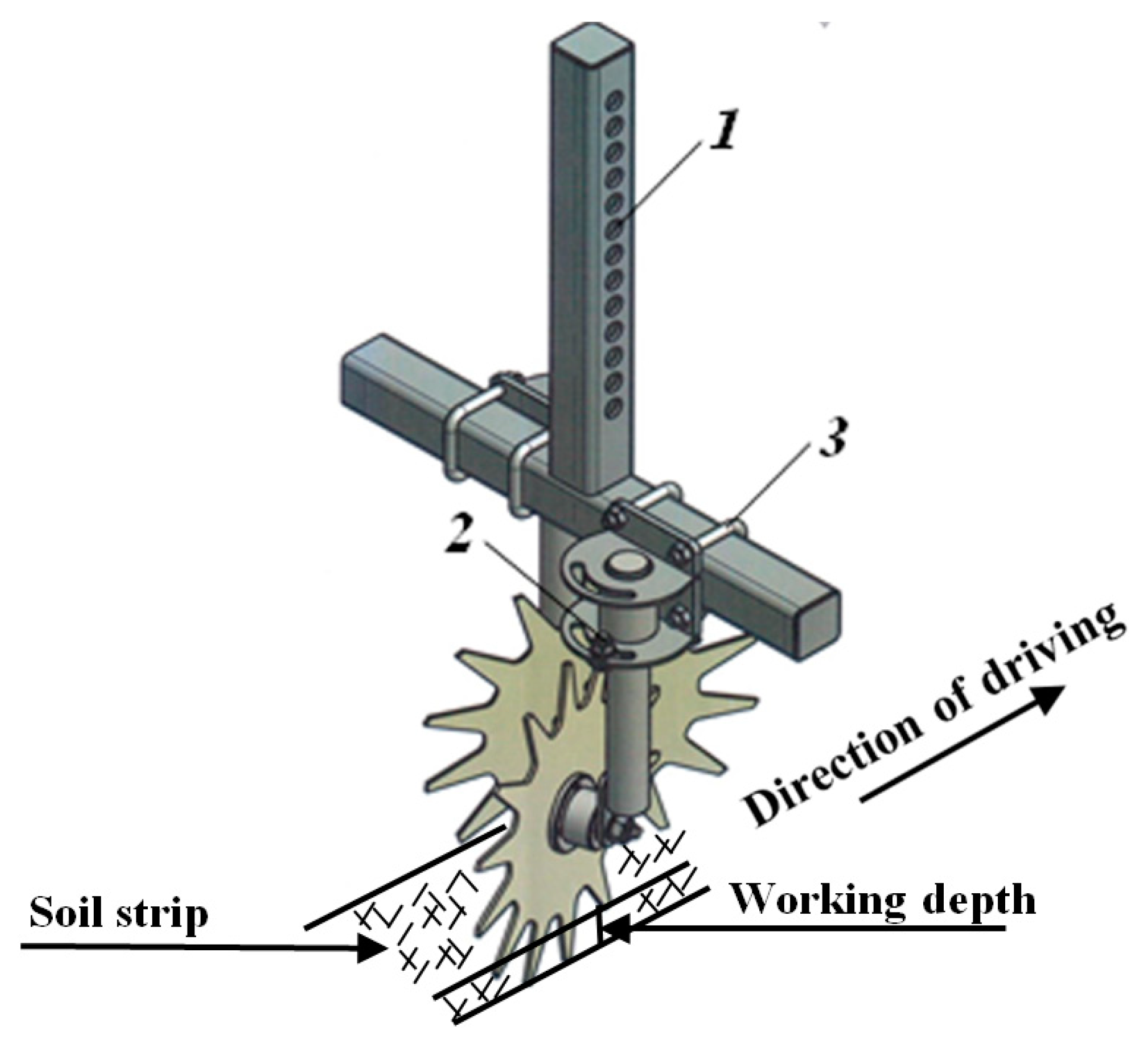
The main object of the research, the row cleaners (Figure 2), consisted of two serrated discs placed at an angle to the direction of driving and with a diameter of 340 mm. Both row cleaners were identical, with 14 teeth each. To prevent the plant residue from clogging up between the discs space, they were kept 130 mm apart in the direction of driving. Disc row cleaners had a working depth of 20 mm. A Ford (Basildon, England) 8340 SLE tractor of 82.3 kW power was used for this study. During the study, driving speeds were controlled to correspond to the chosen constant actuators. Data recorder‒accumulator SKRT-21 Lite with an electronic clock and the software SKRT-MANAGER recorded the driving speed every 15 s. SKRT-21 Lite and SKRT-MANAGER was manufactured by JV Technoton (Minsk, Belarus).
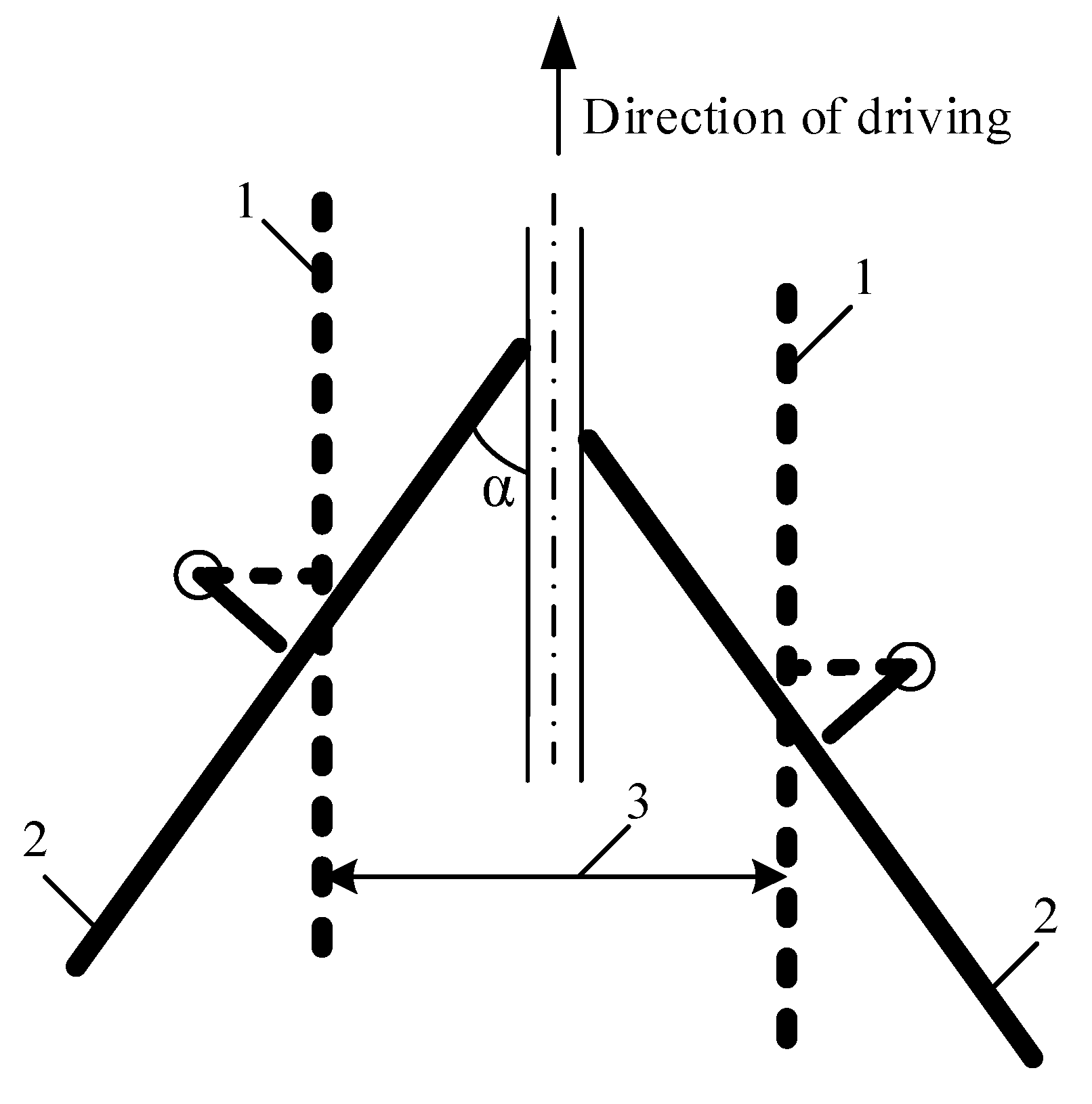
Field experiments were performed by adjusting the various technical parameters of the row cleaners. First of all, the row cleaner discs were parallel to each other; afterwards, they were rotated and the slip angle measured with a goniometer manufactured by ADA Instruments (Liverpool, UK) (Figure 3). Gaps between the row cleaner discs were set to 165, 180, and 195 mm, and the slip angles to 10, 15, and 22.5°. Driving speed is another very important technical parameter that also affects the work quality of the machine parts. Experiments were carried out at four different driving speeds: 1.3, 1.9, 2.5, and 3.1 m s−1.
Research were performed in plots of 50 m2 with five replications. Treatment levels were justified according to other scientists’ recommendations [35,42,44] and according to the strip width of corn, sugar beet, soya, and other plants grown in wide strips. Before experimental research was carried out, theoretical research was performed to determine the dependence of strip width on row cleaners’ technological parameters [9].
2.3. Removed Portion and Distance of Plant Residue
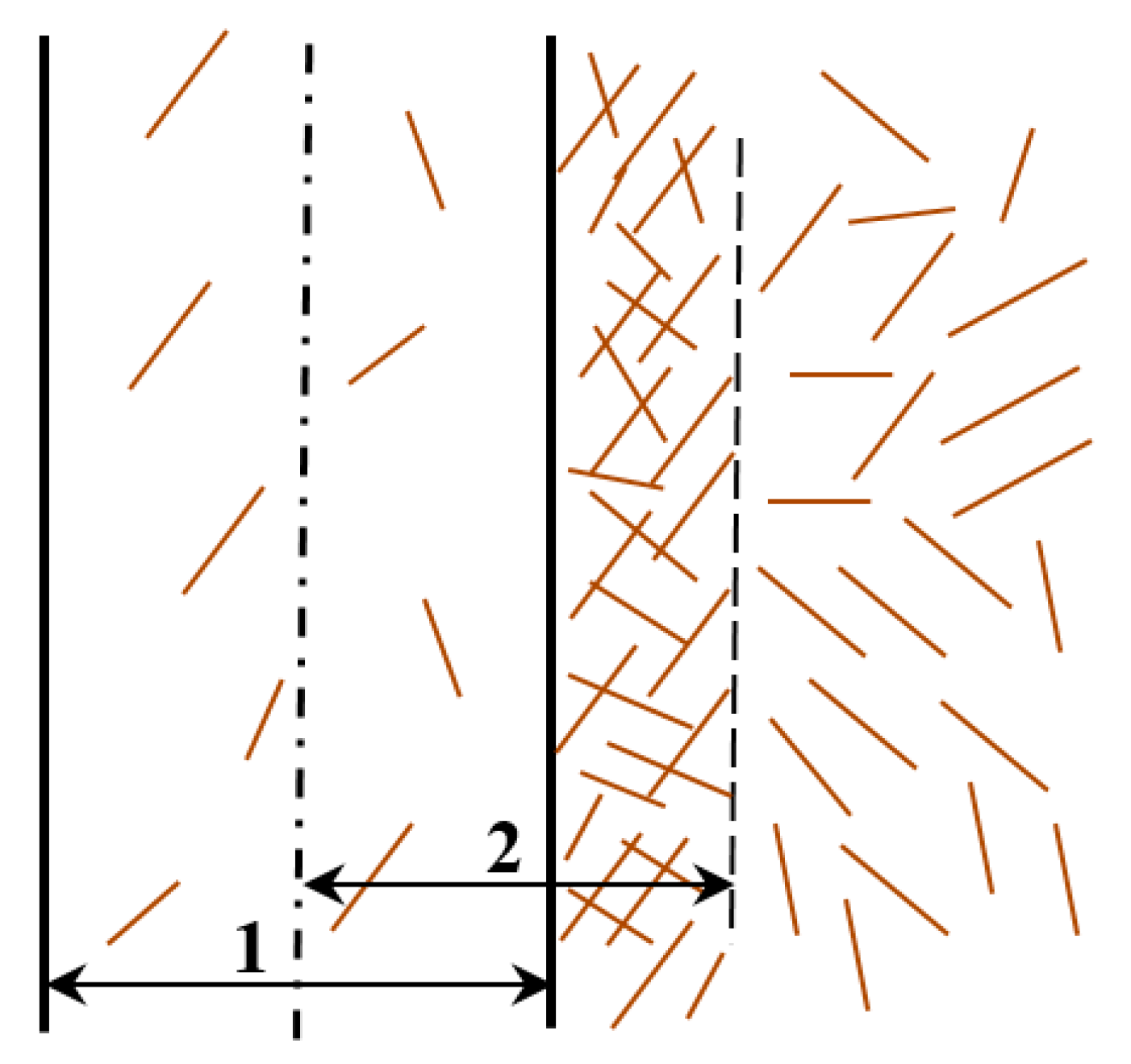
Field experiments were carried out in an area where the soil was undisturbed after harvesting and covered by plant residue, maintaining natural conditions so that the results of the research would have not only scientific but also practical significance. The course of the research was as follows: First the technological parameters of the row cleaners were set, such as the gap between the discs and the slip angles of the discs. Moreover, plant residue was taken from non-removed plots by selecting 0.1 m2 areas at random, with five replications. Then, plant residue was removed with a row cleaner at different speeds. Afterwards, the plant residue was taken from the removed strip in the same way as previously, and we evaluated the difference in mass of plant residue. Using a precise measuring tape, the distance the plant residue was moved was measured from the centre of the strip (Figure 4). Measurements were made over a 10 m pass for every combination of factors [9]. Subsequently, the slip angles of the discs or the gaps between the discs were changed and the experiments repeated in the same sequence at different speeds.
2.4. Multiple Regression Models
According to the results of experimental studies, a multiple regression model was developed for analysing the interaction of the technological parameters of the process of plant residue removal from the strip and the background for their rational values.
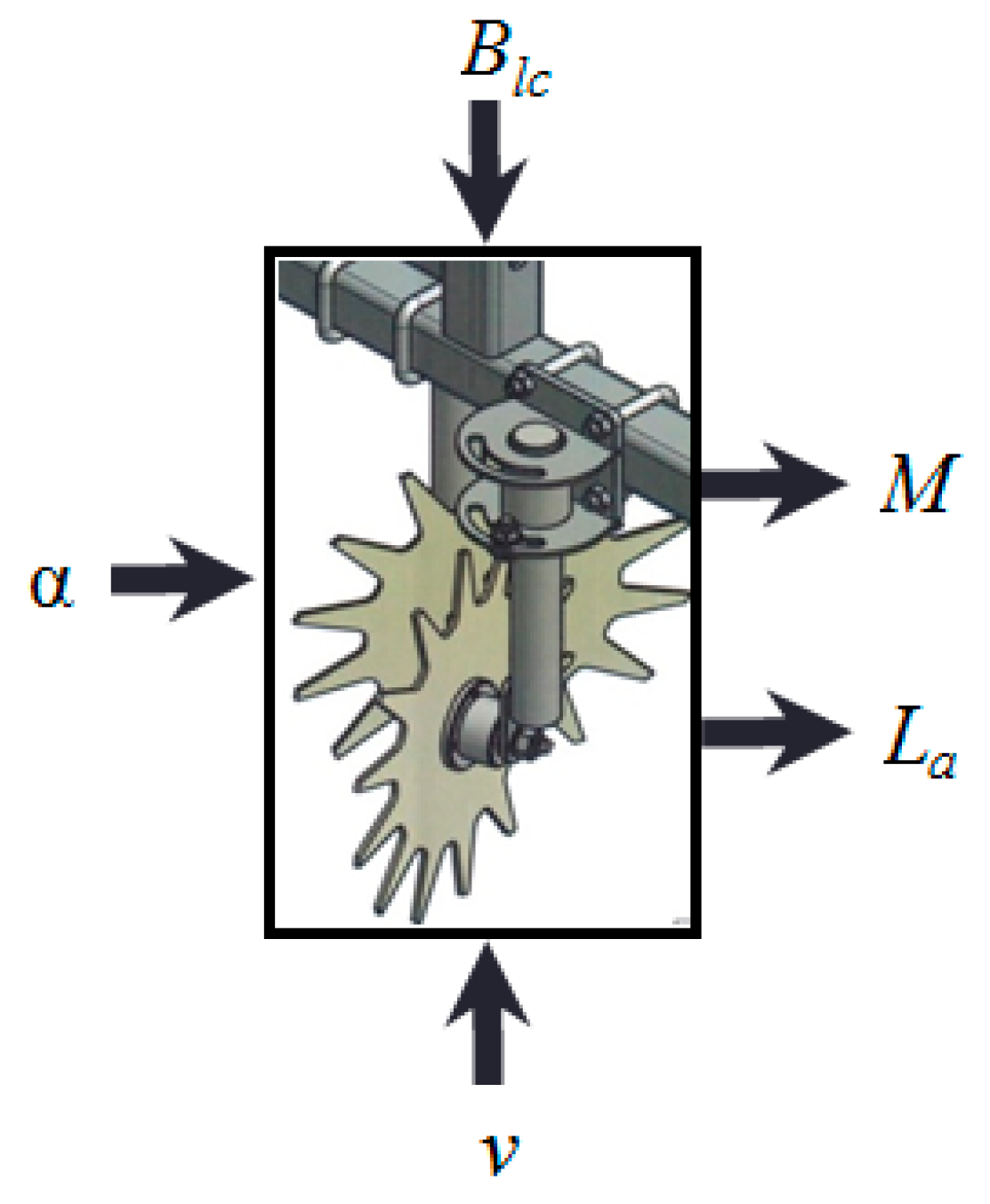
Using the three-factor experiment modelling method [5], we made regression equations for estimating the proportion removed from the strip plant residue (M) and the distance the plant residue was moved from the middle of the strip (La), which is influenced by the gap between the discs (Blc), the slip angle (α), and the speed of driving (v) (Figure 5).
The effect of different parameters of the row cleaner discs on the percentage of plant residue removed from the strip and their distance from the middle of the strip is described by the following equations: M = f(Blc), M = f(α), and M = f(v); and La = f(Blc), La = f(α), and La = f(v), respectively. The parameters varied within limits that coincided with the parameters used in experiments, as follows: 165 ≤ l1 ≤ 190 mm; 10 ≤ α ≤ 22.5; 1.3 ≤ v ≤ 3.1 m s−1.
A multiple regression model was constructed with three variables, as follows:
where Y is M or La; M—part of plant residue removed from the strip, in %; La—distance plant residue was moved from the centre of the strip, in mm; b0—free coefficient of regression; b1, b2,…b9—coefficients; Blc—gap between discs, in mm; α—slip angle of row cleaner discs, in degrees; v—driving speed, in m s−1; εA—error.
2.5. Statistical Analysis
The significance of model parameters was tested at a confidence interval of p < 0.01. R-squared indicated the relationship between experimental and empirical results. The differences among the treatments analysed were assessed by calculating the least significant difference (LSD) at 0.05 probability by using the Tukey HSD (honest significant difference) method.
3. Results and Discussion
3.1. Removal of Plant Residue
After checking the significance of the coefficients of the multiple regression model of the amount of removed plant residue (M), four coefficients were found to be insignificant. Then, the M regression equation was obtained using six coefficients as follows:
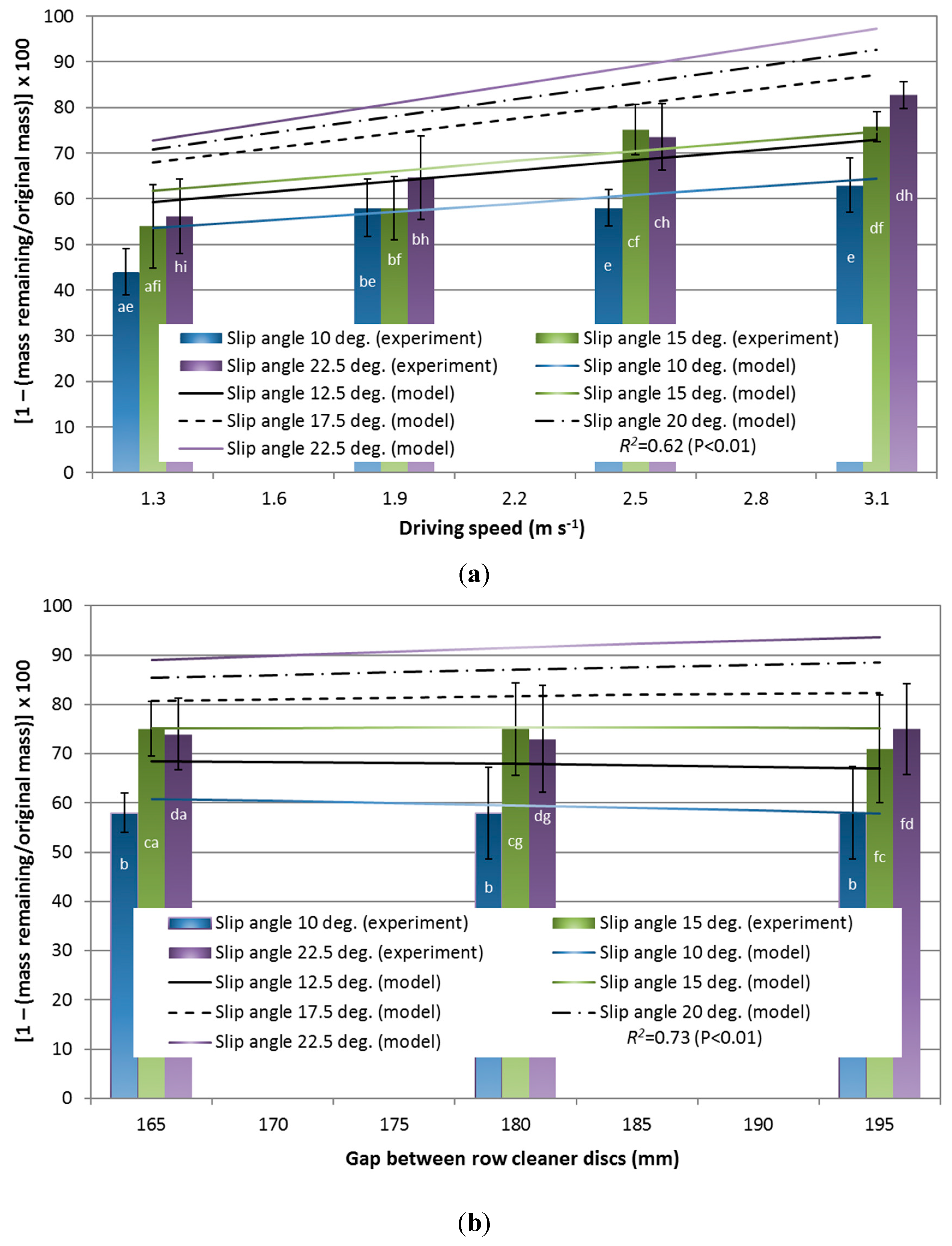
According to the obtained multiple regression model data, it was determined that increasing the driving speed from 1.3 to 3.1 m s−1 at an interval of 0.3 m s−1, when the slip angle is constant, resulted in the amount of strip plant residue removed increasing slightly, on average approximately 3% (Figure 6a). When analysing the experimental data, we did not notice any significant differences due to increased driving speed when the slip angle was not changed. According to experiments and the multiple regression model, we can affirm that the driving speed does not affect the amount of plant residue removed, because by increasing the driving speed the soil surface area is affected. Similar trends have been noted by scientists from other countries performing similar experiments, who found that a driving speed of up to 2.8 m s−1 does not have a significant effect on the amount of plant residue removed [36,45]. In addition, experiments and multiple regression models showed a similar tendency when the gap Blc increased from 165 mm to 195 mm at an interval of 5 mm (Figure 4b). Increasing the slip angle from 10 to 22.5° at an interval of 2.5° and keeping the driving speed constant (at 2.5 m s−1), we predicted that the amount of strip plant residue removed would increase. An increased slip angle meant that a larger soil surface area was affected. In this case, the effect of slip angle was greater than the driving speed or the gap between the discs Blc. The difference between experimental and empirical values was, on average, approximately 12%.
3.2. The Distance Plant Residue Is Removed Depends on the Row Cleaner Parameters
After checking the significance of the coefficients of the multiple regression model of distance from the strip centre removed plant residue (L), three coefficients were found to be insignificant. Then, the La regression equation was obtained using seven coefficients as follows:
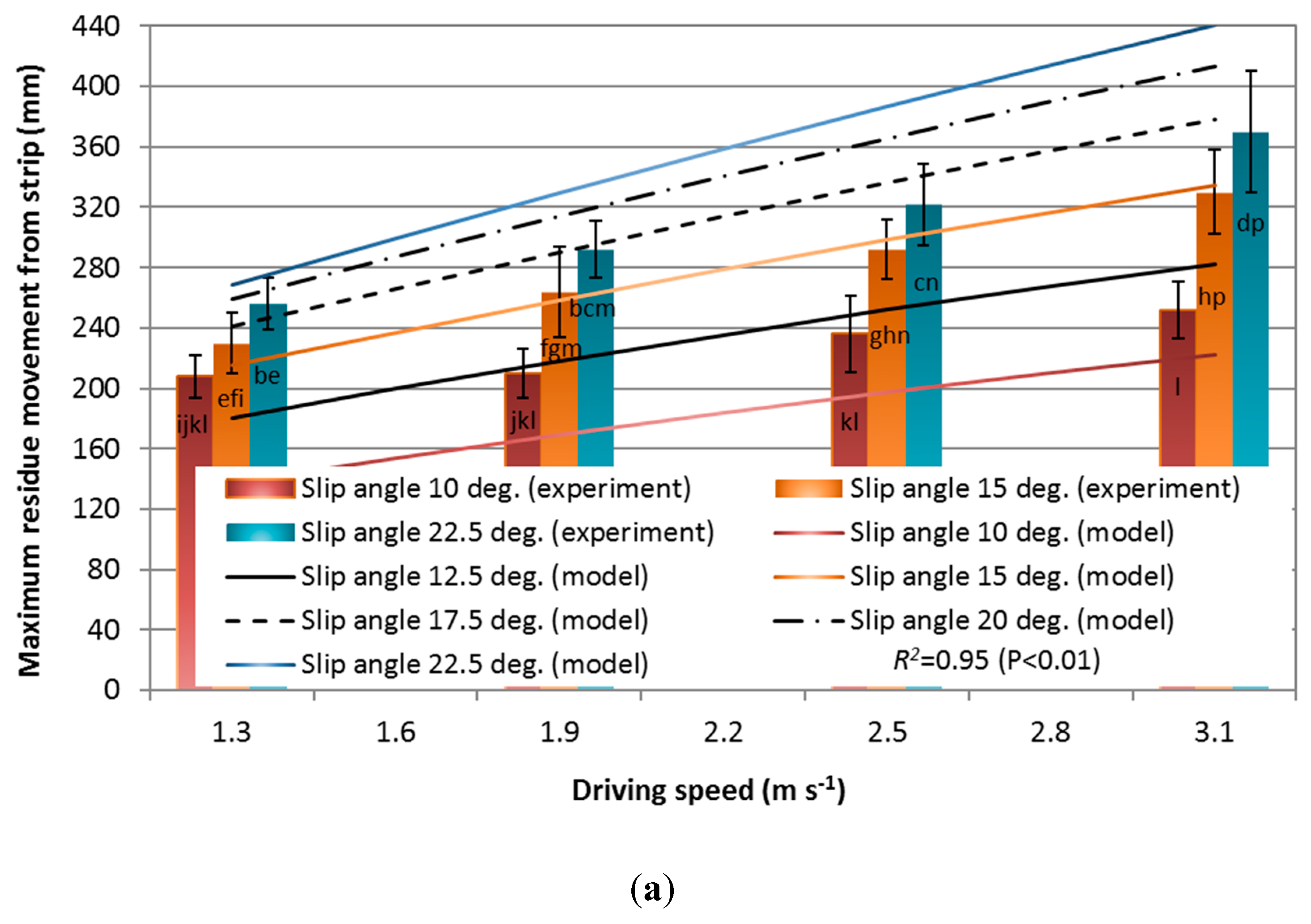
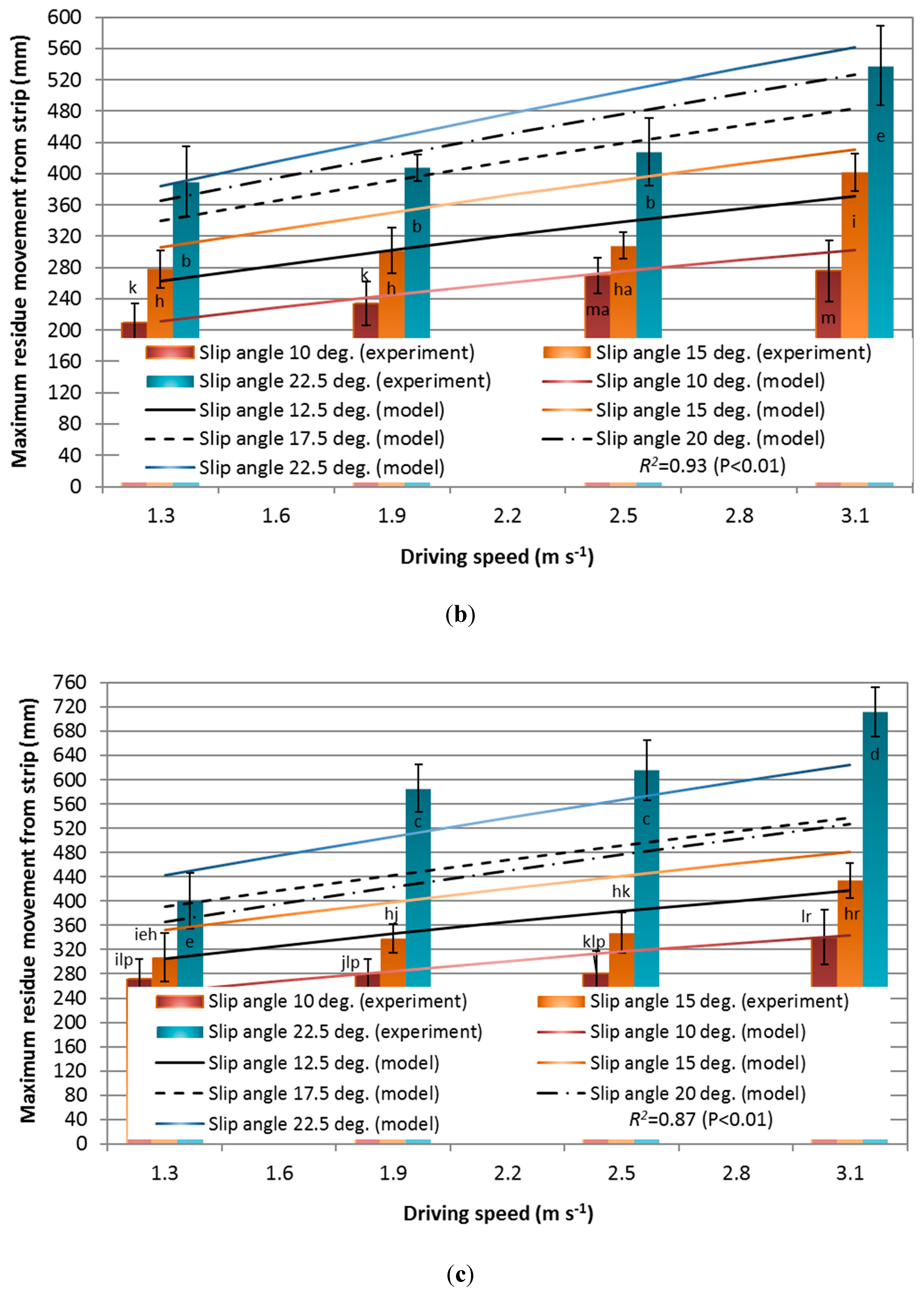
Experimental studies and multiple regression models showed that the distance the plant residue is moved increases when the gap between the discs Blc and the driving speed increases (Figure 7). According to experimental studies, when the gap Blc was 165 mm, plant residue was removed up to 370 mm from the centre of the strip; when the gap Blc was 180 mm it was up to 538 mm; and if the gap was 195 mm it was up to 712 mm. These results were the highest and determined at a driving speed of 3.1 m s−1 and a 22.5° slip angle. Analysis of the experimental results showed that reducing the angle decreases the distance of plant residue removal. The minimum distances of removal were obtained at a slip angle of 10°. Comparing the results for the slip angles of 10° and 22.5° of the row cleaner discs, we found a significant impact for all driving speeds and gaps. In addition, multiple regression models have shown that the distance the plant residue is moved from the middle of the strip increases by an average of approximately 20 mm when the driving speed changes from 1.3 to 3.1 m s−1 at an interval of 0.3 m s−1 and the slip angle is constant. The increase in the driving speed increased the inertia force, and the distance plant residue was moved increased. According to the data obtained from the multiple regression model, as well as the data obtained from the experiments, it was found that a reasonable driving speed would be up to 2.5 m s−1 and the slip angle from 10 to 15°. For such row cleaner parameters, plant residue will not be translocated onto the adjacent row; therefore, this creates suitable conditions for the cultivation of plants with broad spacing between rows. The estimated difference between the experimental and empirical values was, on average, approximately 10%. Other authors, who studied the effect of row cleaners’ speed on the removal of plant residue, obtained similar results. Raoufat and Matbooei (2007) [44] found that the most suitable driving speed when using row cleaners is 1.94 m s−1, and Yang et al. (2015) [46] found that it was 2.2 m s−1.
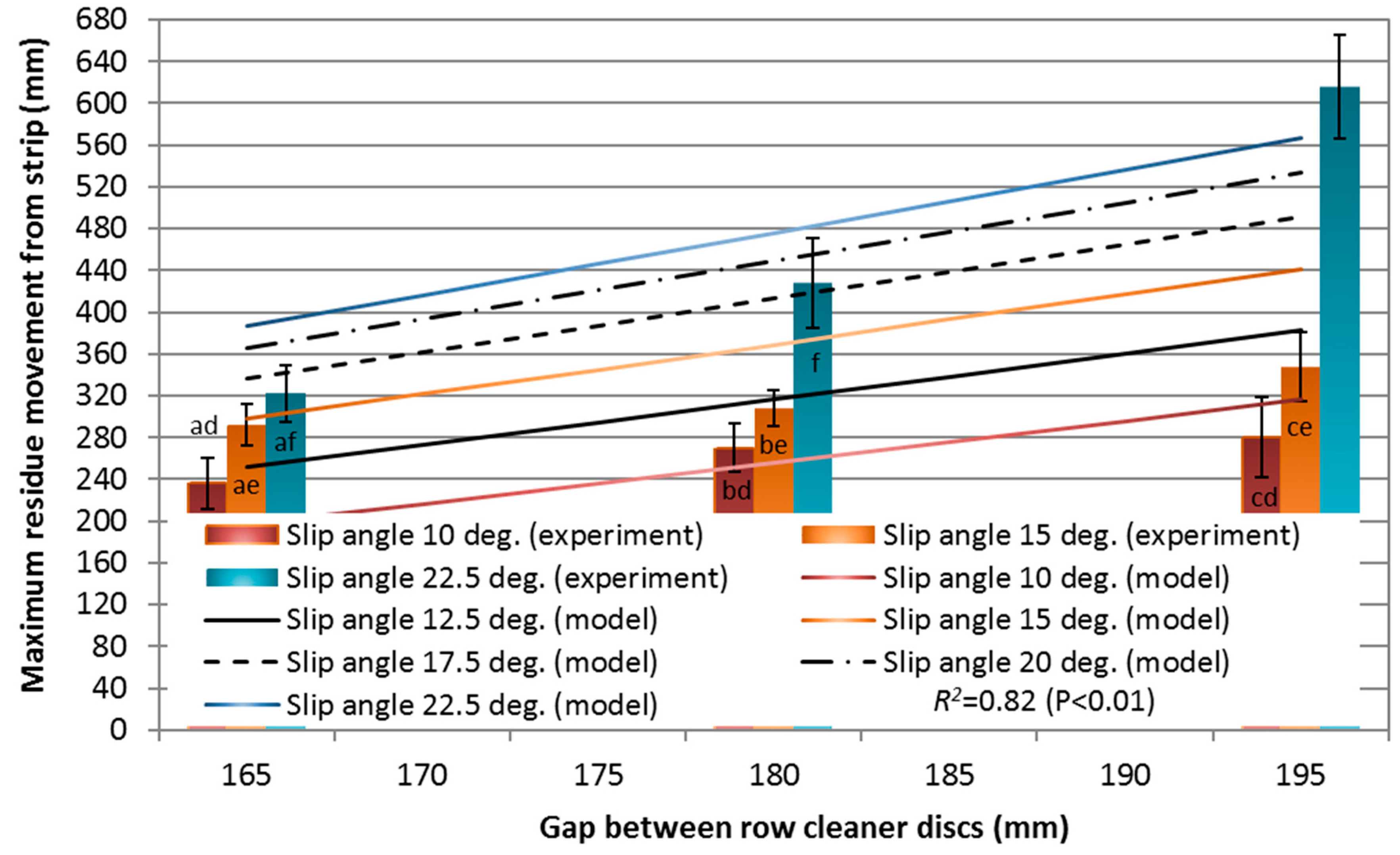
Experimental studies showed that at a driving speed of 2.5 m s−1, when increasing the gap Blc, the increase in the distance plant residue is moved is not significant, except for gap Blc of 195 mm (Figure 8). It was found that when the maximum slip angle of 22.5° was compared to smaller slip angles (15° and 10°), a significant reduction in the removal distance was noticed only for the gaps of 180 and 195 mm. In addition, multiple regression models have also shown that the distance plant residue is moved from the middle of the strip increases (approximately 20 mm on average) when gap Blc is increased from 165 to 195 mm at an interval of 5 mm, if the slip angle is unchanged. According to the data obtained from the multiple regression model, as well as the experimental data, a reasonable gap Blc is from 165 to 180 mm and a good slip angle of discs is from 10° to 15°. With these technological parameters for the row cleaners, plant residue will be removed from the strip, but will not be placed on the adjacent strip that is being prepared. The difference between the experimental and empirical values was, on average, approximately 11%.
By summarizing the results of these studies, we can conclude that the settings of the row cleaner and driving speed have a major impact on the distance plant residue is moved from the centre of the strip. However, a larger portion of removed plant residue can be obtained by adjusting the slip angle of the discs. Other scientists have also investigated the impact of cultivating machinery with disc working parts on removed plant residue. Ulickas (1969) [42] investigated the technological processes of the disc harrows and determined that when the diameter of the discs and the slip angle increased, the straw was moved further away. Raoufat and Matbooei (2007) [44] investigated the effect of row cleaner wheels on wheat straw removal, and the depth of incorporation of corn seeds and their emergence, and found that row cleaners can remove 45–70% of plant residue before sowing. The best results were obtained when the driving speed of the row cleaners was 1.94 m s−1.
According to the agrotechnical requirements, plant residue should be moved no further than the middle of two adjacent strips. The results of this experiment are important for choosing the best row cleaner operational settings of crop residue translocation for crops grown in wide inter-rows. For example, for corn grown in inter-rows of 700–750 mm, the translocation of the plant residue should be up to 350–375 mm; for sugar beet grown with inter-rows of 500 mm it is up to 250 mm; and for fava beans grown with inter-rows of 450–600 mm it is up to 225–300 mm.
4. Conclusions
Well-selected and well-adjusted row cleaner parameters are essential components for ensuring the success of a strip-tillage system. An analysis that included empirical and field experiments for investigating the interaction of two serrated 340-mm diameter discs with removed plant residue showed that increasing the gap between the discs and the driving speed resulted in an increase in the distance the plant residue was moved from the strip centre. The slip angle of the discs had a greater effect on the amount of removed plant residue when compared to the gap and the driving speed. The parameters of the disc row cleaner are suitable and meet the agrotechnical requirements when the plant residue moved up to half the distance between the two adjacent strips.
Field experiments and empirical analysis show that most of the plant residue, i.e., 83%, is removed from the strip when row cleaners have a slip angle of 22.5° and the driving speed is 3.1 m s−1. However, it has been shown that this speed is too fast for strip-tillage machines with row cleaners, because with the aforementioned parameters for the row cleaners, the plant residue is thrown too far and ends up on the adjacent strip that is being prepared.
By evaluating the amount of removed plant residue and the distance it is moved, we can see that the best results were obtained when the slip angle was 15° (in the range of 12.5 to 15° according to the empirical analysis), the gap between the discs was 180 mm and the driving speed was 2.5 m s−1. With such row cleaner parameters, 75% of plant residue was removed from the strip, and the distance from the middle of the strip was 308 mm.
Many unanswered questions remain on this topic; thus, future research should examine the soil‒residue‒row cleaner interaction and determine the influence of different soil properties and different plant residue types and amounts on the process of row cleaning with row cleaners. It is also necessary to substantiate the effect of row cleaner settings on the soil properties and the traction forces of the strip-tillage machine.
Author Contributions
Conceptualization, E.Š., K.L., V.N. and Z.K.; methodology, E.Š. and K.L.; validation, E.Š.; formal analysis, K.L.; investigation, K.L. and V.N.; data curation, K.L., E.Š., V.N. and Z.K.; writing—original draft preparation, K.L; writing—review and editing, K.L., E.Š., V.N. and Z.K.; supervision, E.Š.; funding acquisition, E.Š. and Z.K.
Funding
This research was funded by Vytautas Magnus University, Agriculture Academy.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Opara-Nadi, O.A. Direct Planting for Increased Crop Production; FAO: Rome, Italy, 2008; Chapter 8. [Google Scholar]
- Sarauskis, E.; Buragiene, S.; Romaneckas, K.; Sakalauskas, A.; Jasinskas, A.; Vaiciukevicius, E.; Karayel, D. Working time, fuel consumption and economic analysis of different tillage and sowing systems in Lithuania. Eng. Rural Dev. 2012, 11, 52–59. [Google Scholar]
- Lal, R.; Shukla, M.K. Principles of Soil Physics; Marcel Dekker Inc.: New York, NY, USA; Basel, Switzerland, 2004. [Google Scholar]
- Romaneckas, K.; Avižienytė, D.; Bogužas, V.; Šarauskis, E.; Jasinskas, A.; Marks, M. Impact of tillage systems on chemical, biochemical and biological composition of soil. J. Elem. 2016, 21, 513–526. [Google Scholar]
- Llanders, J.N.; Rass, G.; Freitas, P.L.; Basch, G.; González, E.S.; Tabaglio, V.; Kassam, A.; Derpsch, R.; Friedrich, T.; Giupponi, L. Effects of zero tillage (No-till) conservation agriculture on soil physical and biological properties and their contributions to sustainability. Geophys. Res. Abstr. 2013, 15, 2013–11756. [Google Scholar]
- Morris, N.; Miller, P.C.H.; Orson, J.H.; Froud-Williams, R. The adoption of non-inversion tillage systems in the United Kingdom and the agronomic impact on soil, crops and the environment—A review. Soil Tillage Res. 2010, 108, 1–15. [Google Scholar] [CrossRef]
- Soane, B.; Ball, B.; Arvidsson, J.; Basch, G.; Moreno, F.; Roger-Estrade, J. No-till in northern, western and south-western Europe: A review of problems and opportunities for crop production and the environment. Soil Tillage Res. 2012, 118, 66–87. [Google Scholar] [CrossRef]
- Šarauskis, E.; Vaitauskienė, K.; Romaneckas, K.; Jasinskas, A.; Butkus, V.; Kriaučiūnienė, Z. Fuel consumption and CO2 emission analysis in different strip tillage scenarios. Energy 2017, 118, 957–968. [Google Scholar] [CrossRef]
- Vaitauskienė, K.; Šarauskis, E.; Romaneckas, K.; Jasinskas, A. Design, development and field evaluation of row-cleaners for strip tillage in conservation farming. Soil Tillage Res. 2017, 174, 139–146. [Google Scholar] [CrossRef]
- Nouri, A.; Lee, J.; Yin, X.; Tyler, D.D.; Jagadamma, S.; Arelli, P. Soil Physical Properties and Soybean Yield as Influenced by Long-Term Tillage Systems and Cover Cropping in the Midsouth USA. Sustainability 2018, 10, 4696. [Google Scholar] [CrossRef]
- Blanco-Canqui, H.; Wienhold, B.J.; Jin, V.L.; Schmer, M.R.; Kibet, L.C. Long-term tillage impact on soil hydraulic properties. Soil Tillage Res. 2017, 170, 38–42. [Google Scholar] [CrossRef]
- Wienhold, B.J.; Tanaka, D.L. Haying, tillage, and nitrogen fertilization influences on infiltration rates at a conservation reserve program site. Soil Sci. Soc. J. 2000, 64, 379–381. [Google Scholar] [CrossRef]
- Lamandé, M.; Schjønning, P.; Tøgersen, F.A. Mechanical behaviour of an undisturbed soil subjected to loadings: Effects of load and contact area. Soil Tillage Res. 2007, 97, 91–106. [Google Scholar] [CrossRef]
- Fritton, D. Evaluation of pedotransfer and measurement approaches to avoid soil compaction. Soil Tillage Res. 2008, 99, 268–278. [Google Scholar] [CrossRef]
- Rusu, T.; Moraru, P.I.; Ranta, O.; Drocas, I. No-tillage and minimum tillage—Their impact on soil compaction, water dynamics, soil temperature and production on wheat, maize and soybean crop. Bull. UASVM Agric. 2011, 68, 318–323. [Google Scholar]
- Hazarika, S.; Parkinson, R.; Bol, R.; Dixon, L.; Russell, P.; Donovan, S.; Allen, D. Effect of tillage system and straw management on organic matter dynamics. Agron. Sustain. Dev. 2009, 29, 525–533. [Google Scholar] [CrossRef]
- Fan, R.; Shi, X.; Chen, X.; Bao, K.; Zhang, X.; Liang, A.; Yang, X.; Jia, S. Tillage and rotation effects on crop yield and profitability on a Black soil in northeast China. Can. J. Soil Sci. 2012, 92, 463–470. [Google Scholar] [CrossRef]
- Šarauskis, E.; Buragienė, S.; Masilionytė, L.; Romaneckas, K.; Avižienytė, D.; Sakalauskas, A. Energy balance, costs and CO2 analysis of tillage technologies in maize cultivation. Energy 2014, 69, 227–235. [Google Scholar] [CrossRef]
- Arvidsson, J. Energy use efficiency in different tillage systems for winter wheat on a clay and silt loam in Sweden. Eur. J. Agron. 2010, 33, 250–256. [Google Scholar] [CrossRef]
- Al-Kaisi, M.M.; Yin, X.; Licht, M.A. Soil carbon and nitrogen changes as affected by tillage system and crop biomass in a corn–soybean rotation. Appl. Soil Ecol. 2005, 30, 174–191. [Google Scholar] [CrossRef]
- Swan, J. Seed-row residue management for corn establishment in the northern US Corn Belt. Soil Tillage Res. 1996, 40, 55–72. [Google Scholar] [CrossRef]
- Wolkowski, R. Row-placed fertilizer for maize grown with an in-row crop residue management system in southern Wisconsin. Soil Tillage Res. 2000, 54, 55–62. [Google Scholar] [CrossRef]
- Morrison, J.E., Jr.; Sanabria, J.; Oemler, J.A. One-pass and two-pass spring strip tillage for conservation row-cropping in adhesive clay soils. Trans. ASAE 2002, 45, 1264. [Google Scholar] [CrossRef]
- Licht, M.A.; Al-Kaisi, M. Strip-tillage effect on seedbed soil temperature and other soil physical properties. Soil Tillage Res. 2005, 80, 233–249. [Google Scholar] [CrossRef]
- Licht, M.A.; Al-Kaisi, M. Corn Response, Nitrogen Uptake, and Water Use in Strip-Tillage Compared with No-Tillage and Chisel Plow. Agron. J. 2005, 97, 705–710. [Google Scholar] [CrossRef]
- Celik, A.; Altikat, S.; Way, T.R. Strip tillage width effects on sunflower seed emergence and yield. Soil Tillage Res. 2013, 131, 20–27. [Google Scholar] [CrossRef]
- Evans, R.G.; Stevens, W.B.; Iversen, W.M. Development of strip tillage on sprinkler irrigated sugarbeet. Appl. Eng. Agric. 2010, 26, 59–69. [Google Scholar] [CrossRef]
- DeJong-Hughes, J.; Vetsch, J. On-farm Comparison of Conservation Tillage Systems for Corn Following Soybeans; University of Minnesota Extension: St. Paul, MN, USA, September 2007. [Google Scholar]
- Trevini, M.; Benincasa, P.; Guiducci, M. Strip tillage effect on seedbed tilth and maize production in Northern Italy as case-study for the Southern Europe environment. Eur. J. Agron. 2013, 48, 50–56. [Google Scholar] [CrossRef]
- Hosking, W.; Bloomer, D. Strip Tillage: A Reduced-Cultivation System for Field Crop Production; LandWISE: Hastings, New Zealand, 2006. [Google Scholar]
- Šarauskis, E.; Koller, K.; Butkus, V. Research on technological parameters to determine the design factors of direct drilling coulters for sugar beets. Landbauforsch Volk 2005, 55, 171–180. [Google Scholar]
- Morris, N.L.; Miller, P.C.H.; Orson, J.H.; Froud-Williams, R.J. Soil disturbed using a strip tillage implement on a range of soil types and the effects on sugar beet establishment. Soil Use Manag. 2007, 23, 428–436. [Google Scholar] [CrossRef]
- Mitchell, J.; Shrestha, A.; Campbell-Mathews, M.; Giacomazzi, D.; Goyal, S.; Bryant, D.; Hererra, I. Strip-Tillage in California’ s Central Valley. Agric. Nat. Resour. 2009, 8361, 1–8. [Google Scholar]
- Pochi, D.; Fanigliulo, R. Testing of soil tillage machinery. In Soil Engineering. Soil Biology; Springer: Berlin/Heidelberg, Germany, 2010; pp. 147–168. [Google Scholar] [CrossRef]
- Linke, C. Direktsaat—Eine Bestandsaufnahme unter Besonderer Berücksichtigung Technischer, Agronomischer und Ökonomischer Aspekte (No-Tillage-Crop Cultivation Taking Account of Technical, Agronomical and Economic Aspects). Ph.D. Thesis, Hohenheim University, Hohenheim, Germany, 1998. [Google Scholar]
- Fallahi, S.; Raoufat, M. Row-crop planter attachments in a conservation tillage system: A comparative study. Soil Tillage Res. 2008, 98, 27–34. [Google Scholar] [CrossRef]
- Ozereljev, V.N. Justification of the parameters of the disk apparatus for contour cutting of raspberry stems. Mech. Electrif. Agric. Veh. 2007, 4, 6–7. [Google Scholar]
- Pozdeev, A.V. Mathematical model of separation of potato tubers in sorting. Mech. Electrif. Agric. Veh. 2007, 11, 38–40. [Google Scholar]
- Kharchenko, G.M. Optimization of operating parameters of centrifuges for cleaning sunflower oil. Mech. Electrif. Agric. Veh. 2008, 7, 47–48. [Google Scholar]
- Požėlienė, A.; Lynikienė, S. Determination of regularity of wheat seed germination stimulation. Agric. Eng. Sci. Work. Inst. Agric. Eng. Lith. Univ. Agric. 2003, 35, 53–60. [Google Scholar]
- Aikins, K.A.; Antille, D.L.; Jensen, T.A.; Blackwell, J. Advances in Residue Management Mechanisms of Zero-Tillage Planters; ASABE: St. Joseph, MI, USA, 2017. [Google Scholar] [CrossRef]
- Ulickas, E. Research of Disc Coulters Designed for Row Crops Tillage. Ph.D. Thesis, Lithuanian Academy of Agriculture, Kaunas, Lithuania, 1969. [Google Scholar]
- Kottek, M.; Grieser, J.; Beck, C.; Rudolf, B.; Rubel, F. World Map of the Köppen-Geiger climate classification updated. Meteorol. Z. 2006, 15, 259–263. [Google Scholar] [CrossRef]
- Raoufat, M.; Matbooei, A. Row cleaners enhance reduced tillage planting of corn in Iran. Soil Tillage Res. 2007, 93, 152–161. [Google Scholar] [CrossRef]
- Valavičius, V. Mathematical Modelling and Experiment Planning; Technika: Vilnius, Lithuania, 2006. [Google Scholar]
- Yang, L.; Zhang, R.; Gao, N.; Cui, T.; Liu, Q.W.; Zhang, D.X. Performance of no-till corn precision planter equipped with row cleaners. Int. J. Agric. Biol. Eng. 2015, 8, 15–25. [Google Scholar]
Figure 1.
Meteorological characteristics.

Figure 2.
Serrated disc row cleaner: 1—Adjustment of working depth; 2—adjustment of slip angle; 3—adjustment of gap between discs.
Figure 2.
Serrated disc row cleaner: 1—Adjustment of working depth; 2—adjustment of slip angle; 3—adjustment of gap between discs.

Figure 3.
Adjustment of row cleaner parameters: 1—Discs held in parallel; 2—disc rotation; 3—gap between discs; α—slip angle.
Figure 3.
Adjustment of row cleaner parameters: 1—Discs held in parallel; 2—disc rotation; 3—gap between discs; α—slip angle.

Figure 4.
Measurement of the distance plant residue was removed: 1—Strip with removed plant residue; 2—distance measurement.
Figure 4.
Measurement of the distance plant residue was removed: 1—Strip with removed plant residue; 2—distance measurement.

Figure 5.
Diagram of multiple regression model of the process of removing plant residue from the strip: Blc—gap between discs, in mm; α—slip angle of row cleaner discs, in degrees; v—driving speed, in m s−1; M—part of plant residue removed from the strip, in %; La—distance plant residue was moved from the middle of the strip, in mm.
Figure 5.
Diagram of multiple regression model of the process of removing plant residue from the strip: Blc—gap between discs, in mm; α—slip angle of row cleaner discs, in degrees; v—driving speed, in m s−1; M—part of plant residue removed from the strip, in %; La—distance plant residue was moved from the middle of the strip, in mm.

Figure 6.
Amount removed from the strip plant residue depending on the slip angle and the driving speed when the gap between the discs Blc is constant (165 mm) (a), and on gap Blc, when the driving speed is constant (2.5 m s−1) (b). The different letters indicate that there are significant differences among the treatments at p < 0.05.
Figure 6.
Amount removed from the strip plant residue depending on the slip angle and the driving speed when the gap between the discs Blc is constant (165 mm) (a), and on gap Blc, when the driving speed is constant (2.5 m s−1) (b). The different letters indicate that there are significant differences among the treatments at p < 0.05.

Figure 7.
Experimental and multiple regression models for the distance plant residue is moved from the middle of the strip, depending on driving speed, slip angle, and a gap between row cleaner discs of 165 mm (a), 180 mm (b), or 195 mm (c). The different letters indicate that there are significant differences among the treatments at p < 0.05.
Figure 7.
Experimental and multiple regression models for the distance plant residue is moved from the middle of the strip, depending on driving speed, slip angle, and a gap between row cleaner discs of 165 mm (a), 180 mm (b), or 195 mm (c). The different letters indicate that there are significant differences among the treatments at p < 0.05.


Figure 8.
The distance plant residue is moved from the strip centre is influenced by the slip angle of the discs and the gap when the driving speed is 2.5 m s−1. The different letters indicate that there are significant differences among the treatments at p < 0.05.
Figure 8.
The distance plant residue is moved from the strip centre is influenced by the slip angle of the discs and the gap when the driving speed is 2.5 m s−1. The different letters indicate that there are significant differences among the treatments at p < 0.05.

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Lekavičienė, K.; Šarauskis, E.; Naujokienė, V.; Kriaučiūnienė, Z. Effect of Row Cleaner Operational Settings on Crop Residue Translocation in Strip-Tillage. Agronomy 2019, 9, 247. https://0-doi-org.brum.beds.ac.uk/10.3390/agronomy9050247
AMA Style
Lekavičienė K, Šarauskis E, Naujokienė V, Kriaučiūnienė Z. Effect of Row Cleaner Operational Settings on Crop Residue Translocation in Strip-Tillage. Agronomy. 2019; 9(5):247. https://0-doi-org.brum.beds.ac.uk/10.3390/agronomy9050247
Chicago/Turabian StyleLekavičienė, Kristina, Egidijus Šarauskis, Vilma Naujokienė, and Zita Kriaučiūnienė. 2019. "Effect of Row Cleaner Operational Settings on Crop Residue Translocation in Strip-Tillage" Agronomy 9, no. 5: 247. https://0-doi-org.brum.beds.ac.uk/10.3390/agronomy9050247
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.