Comparison of Different Techniques to Calculate Properties of Atmospheric Turbulence from Low-Resolution Data

 ,
,  and
and
Abstract
:1. Introduction
2. Description of Methods
2.1. Characteristic Scales of Turbulence
2.2. Estimation of EDR from 1D Intersections of the Turbulent Velocity Field
2.3. External Intermittency
3. Error Analysis of EDR Estimates
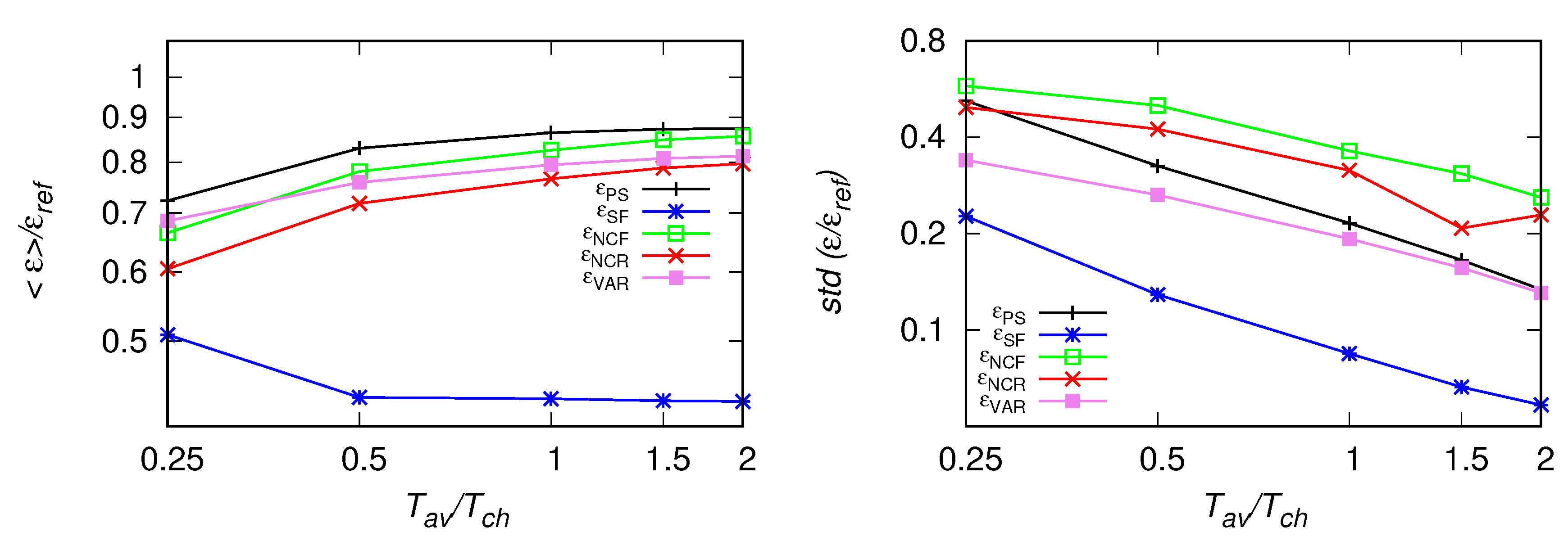
4. EDR Retrieval from Artificial Signals
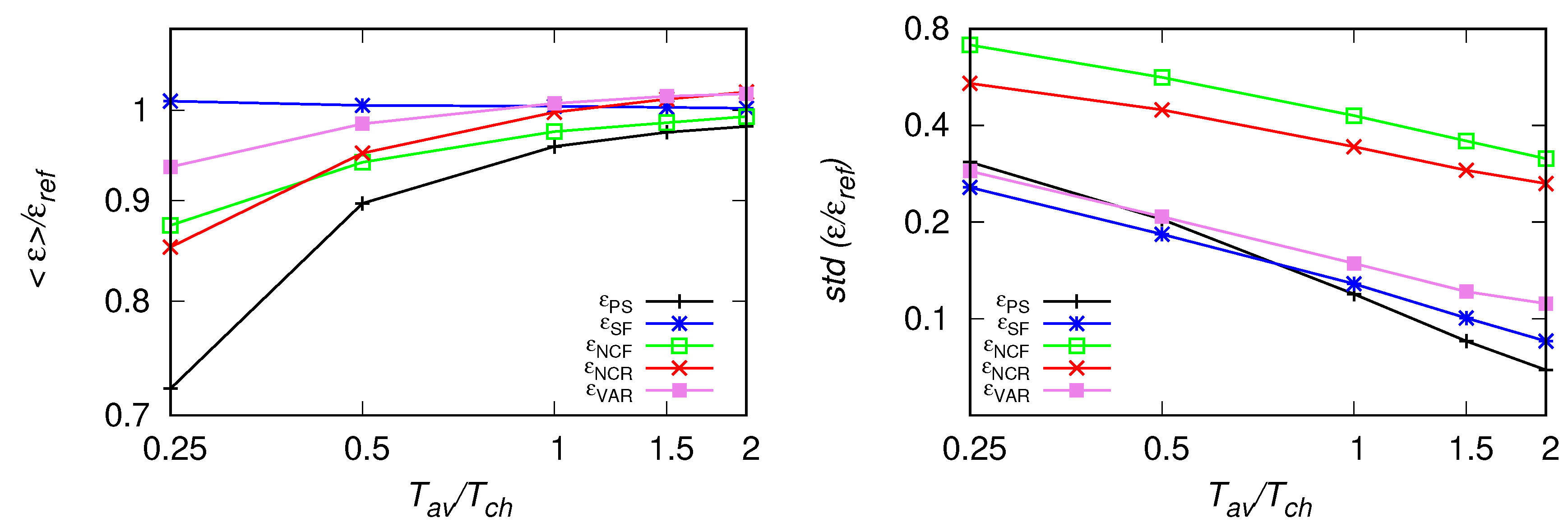
4.1. Different Averaging Windows
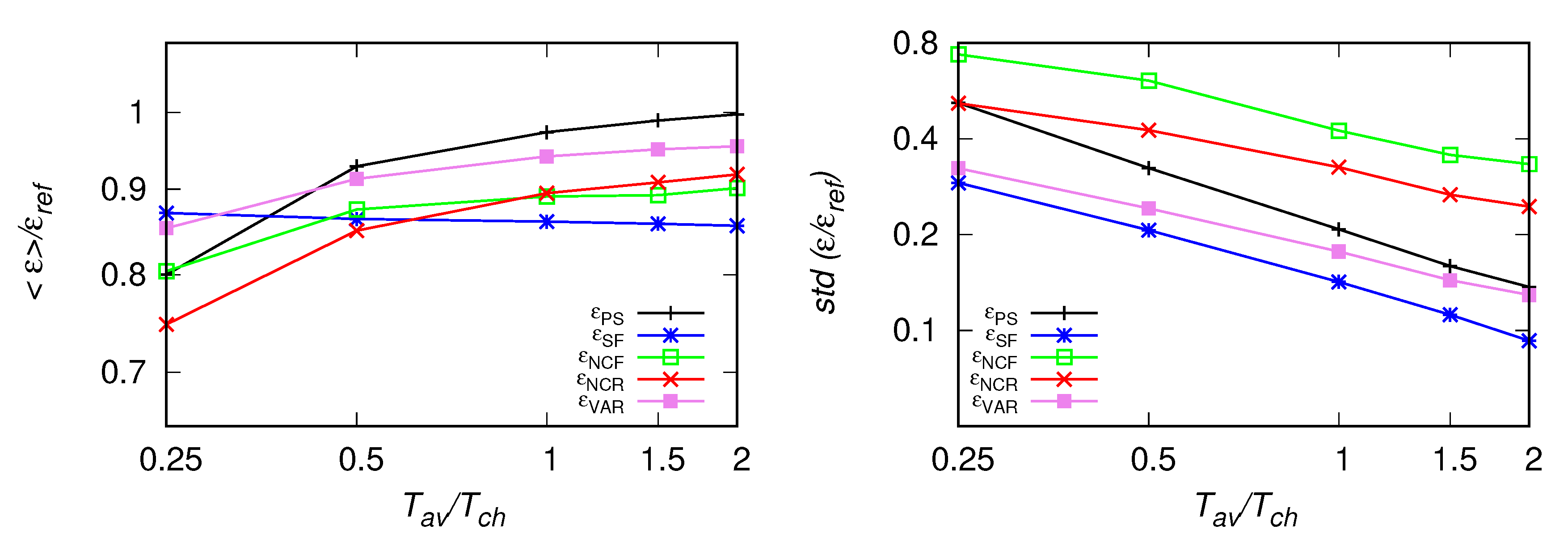
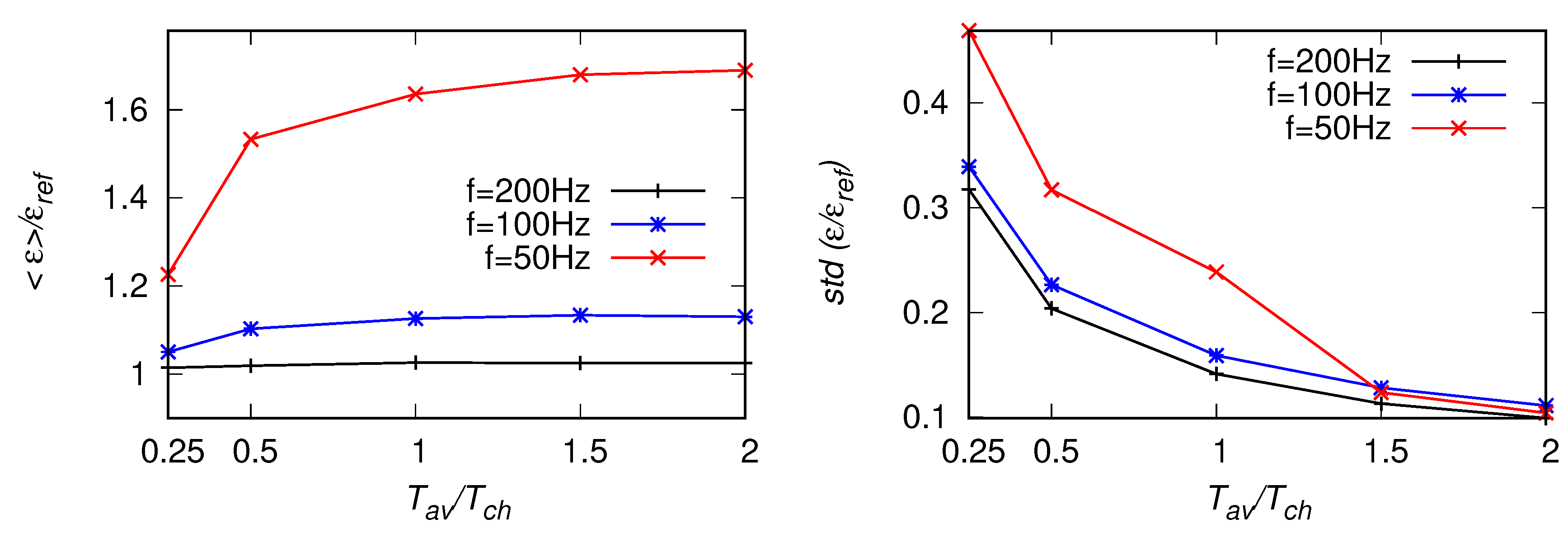
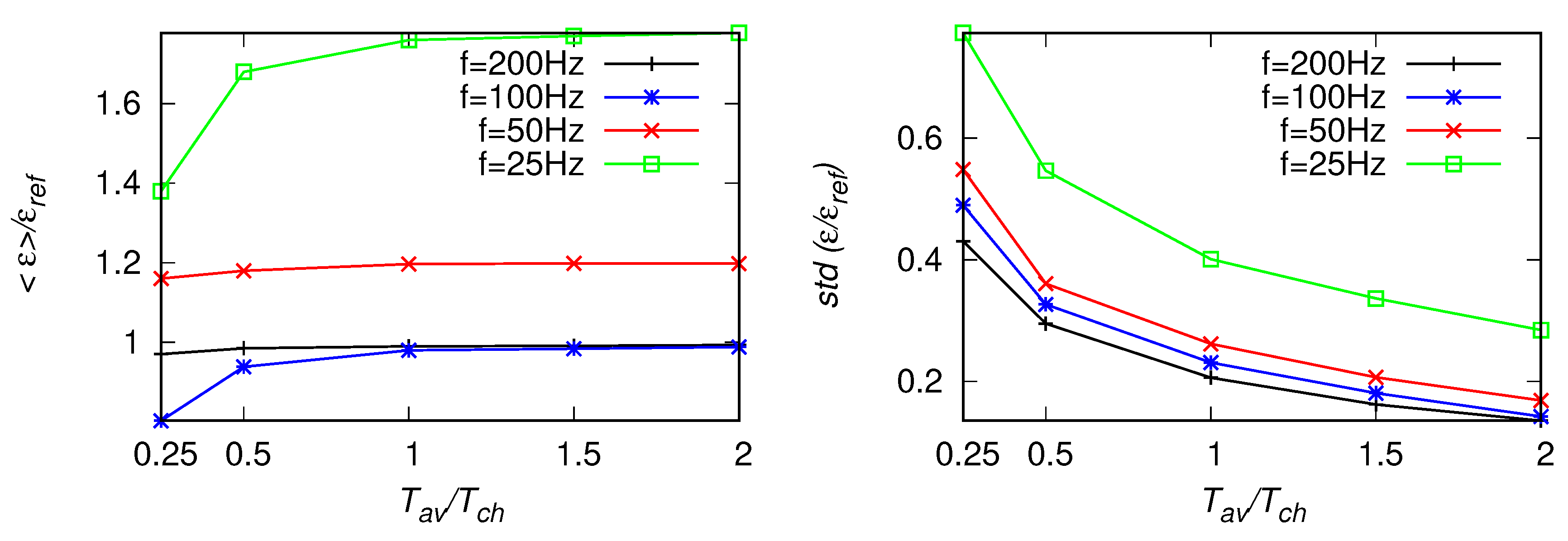
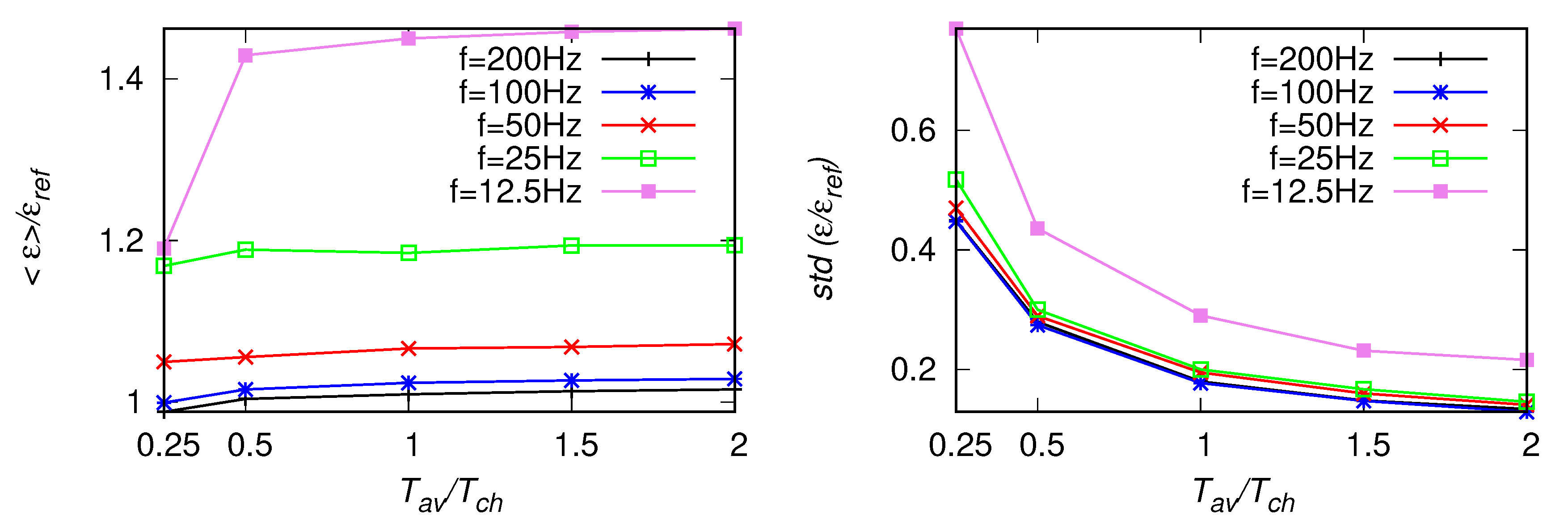
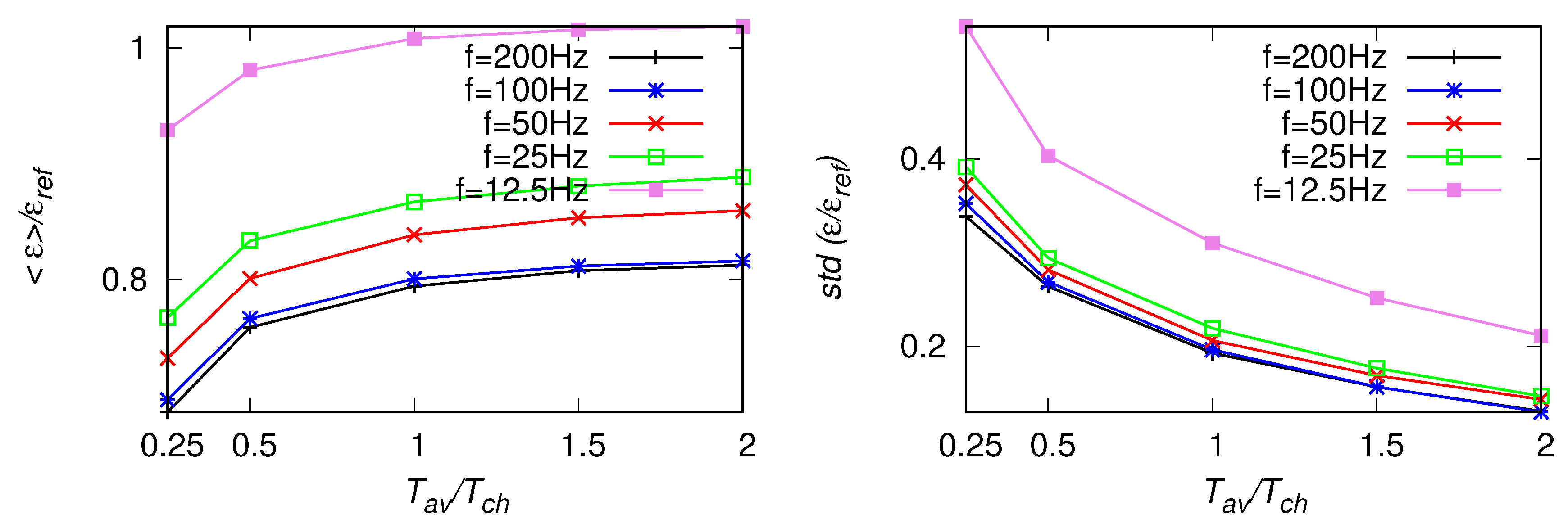
4.2. Different Averaging Windows and Different Sampling Frequencies
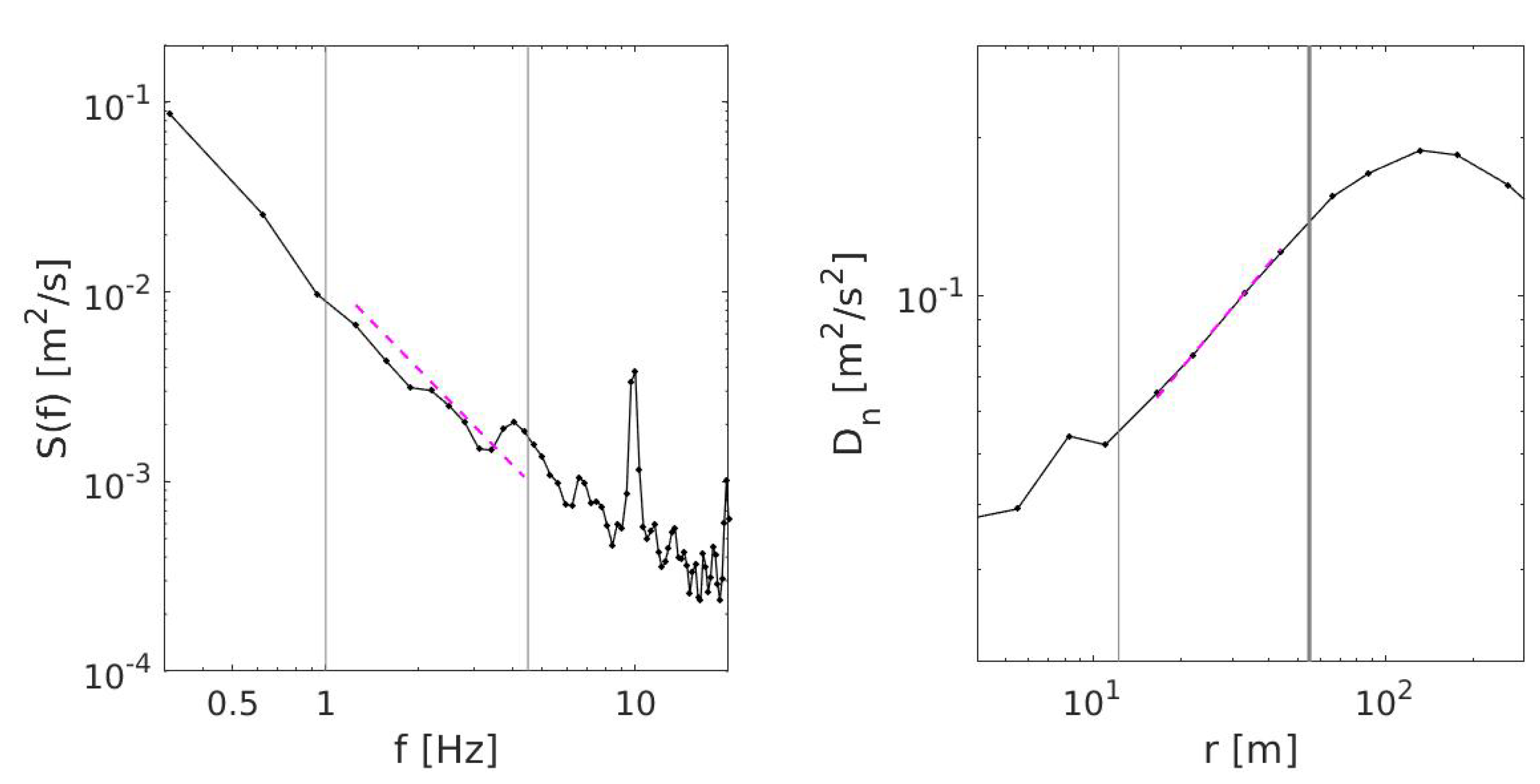
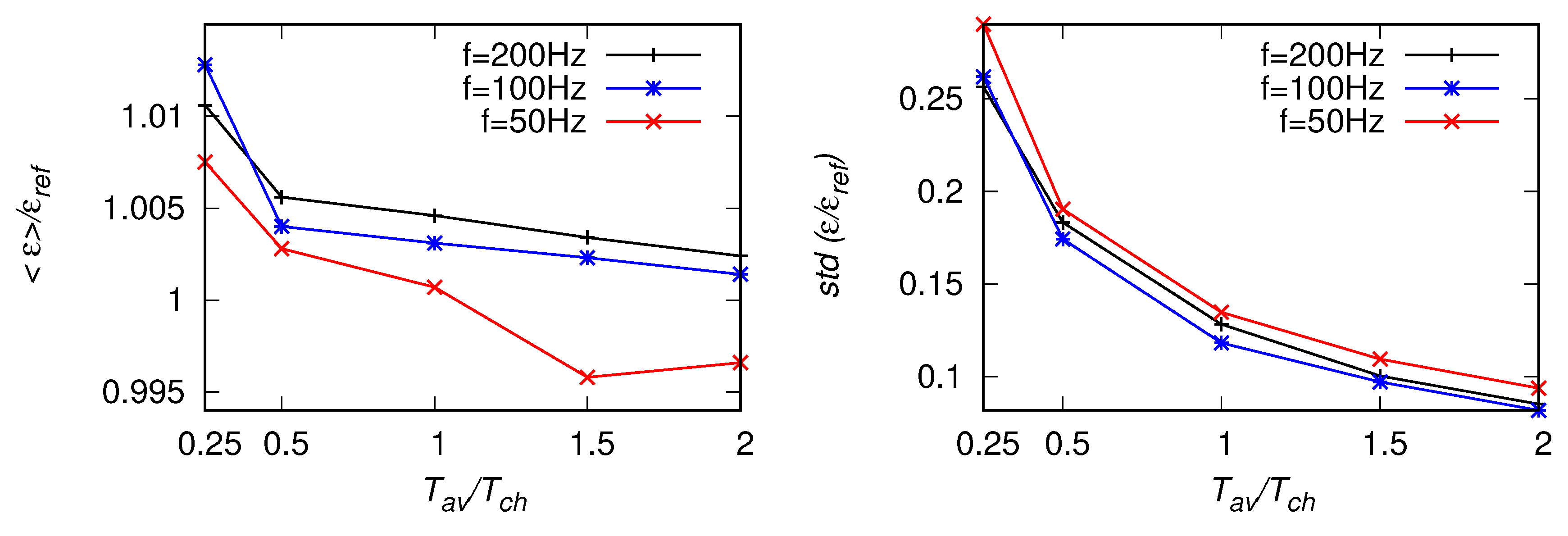
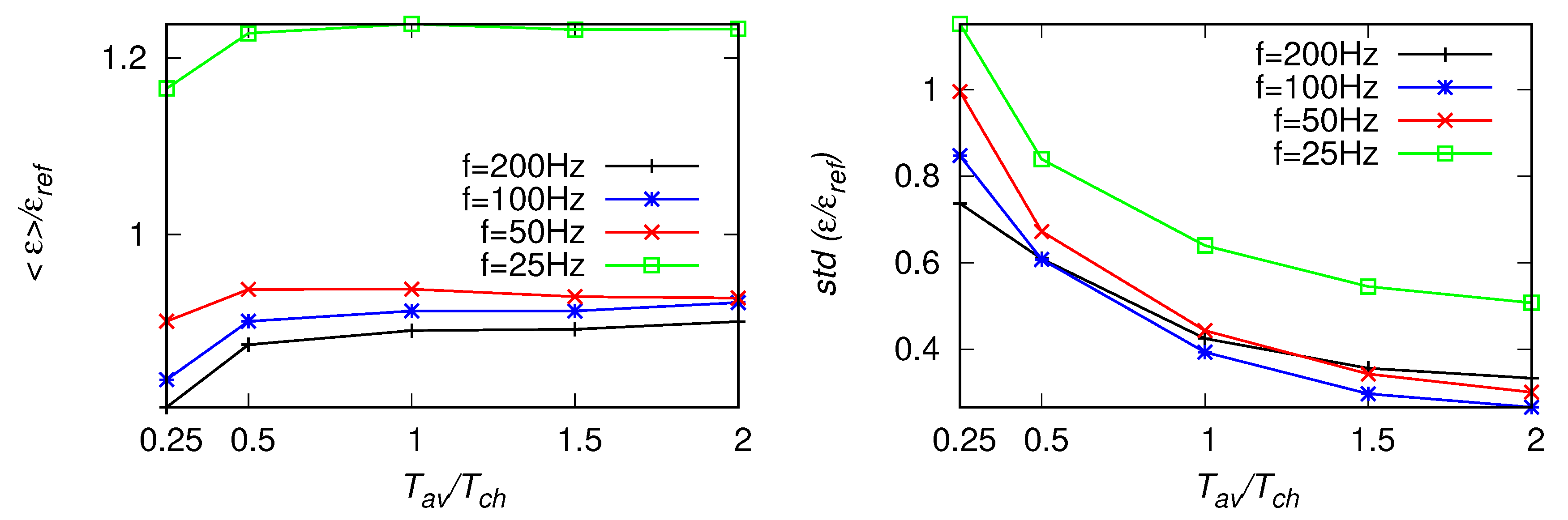
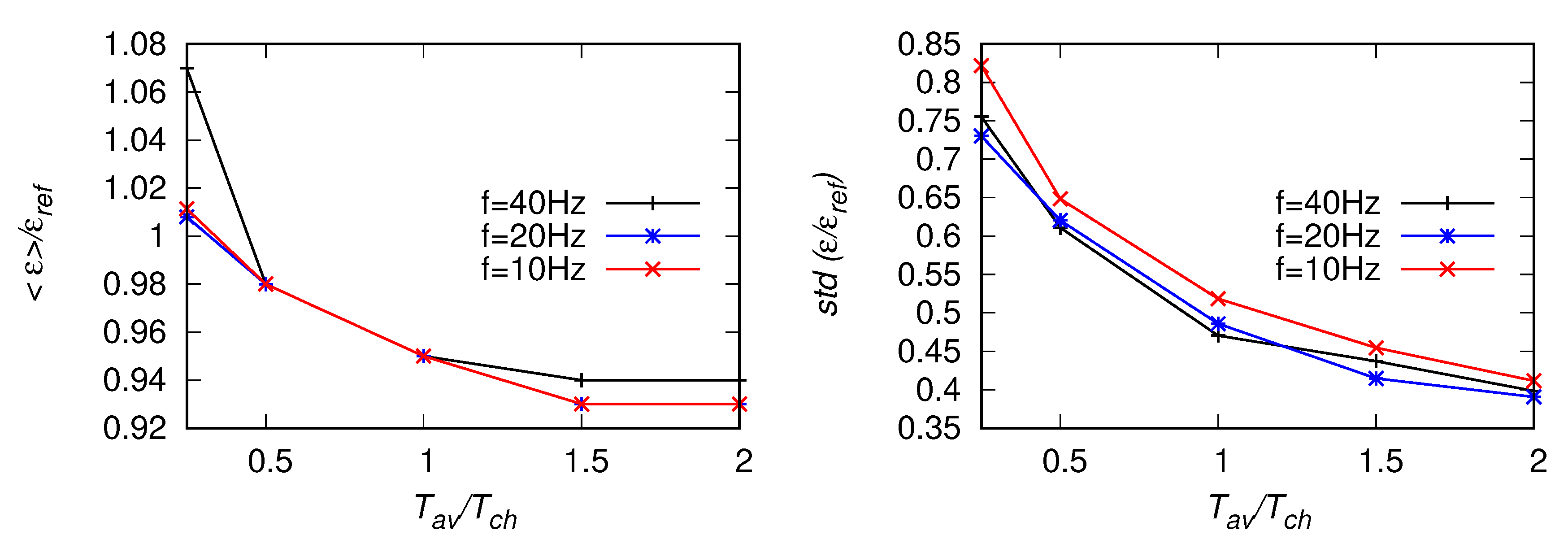
4.2.1. Power Spectra
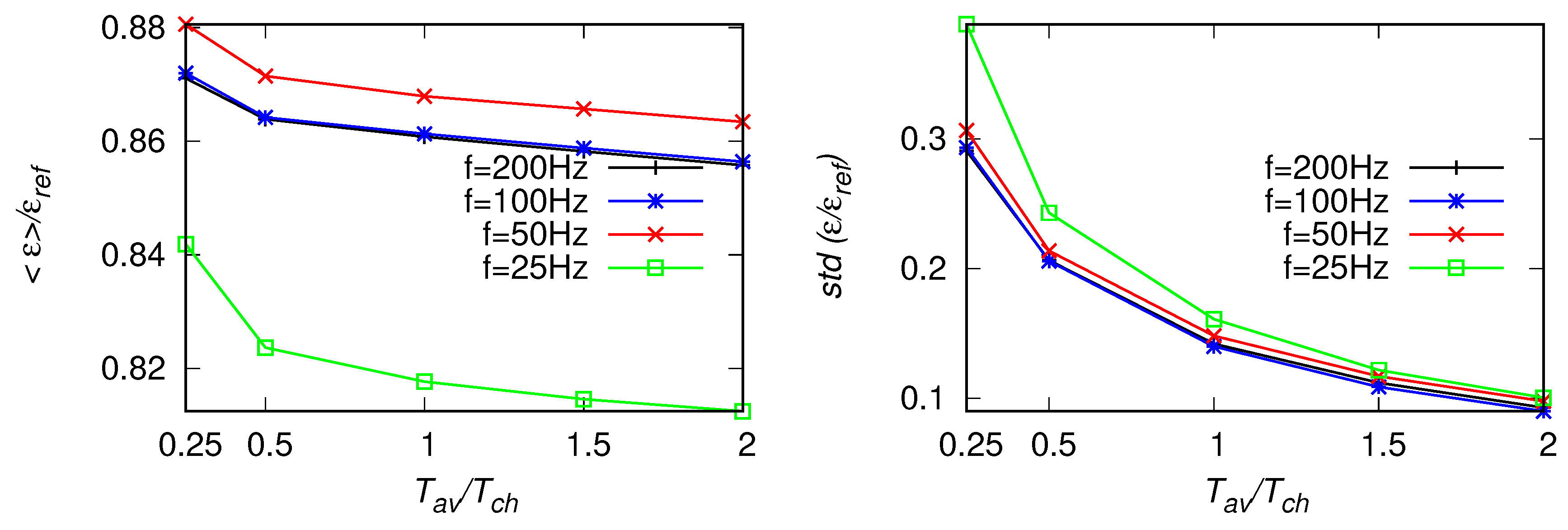
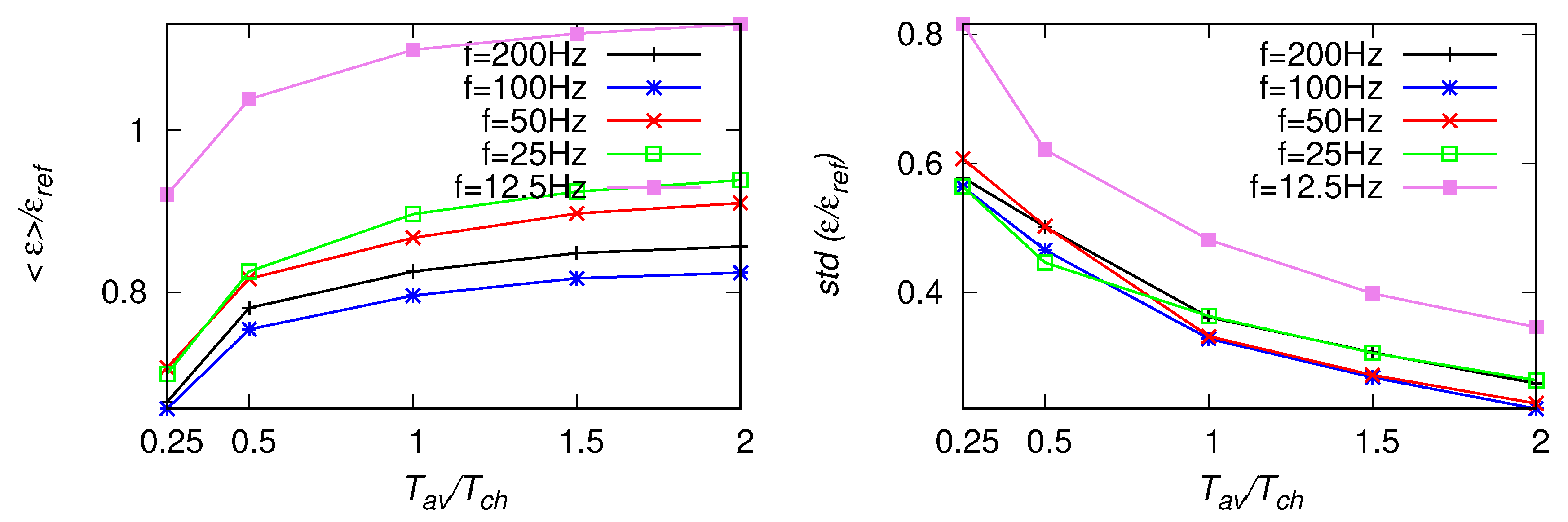
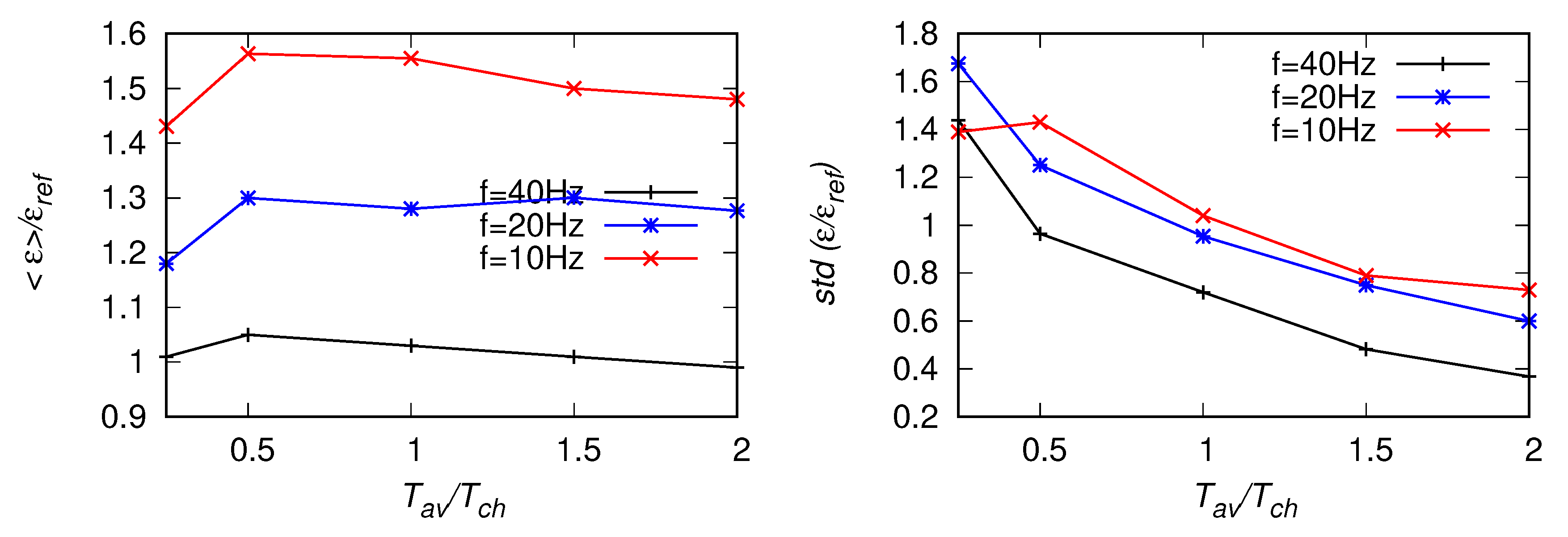
4.2.2. Structure Functions
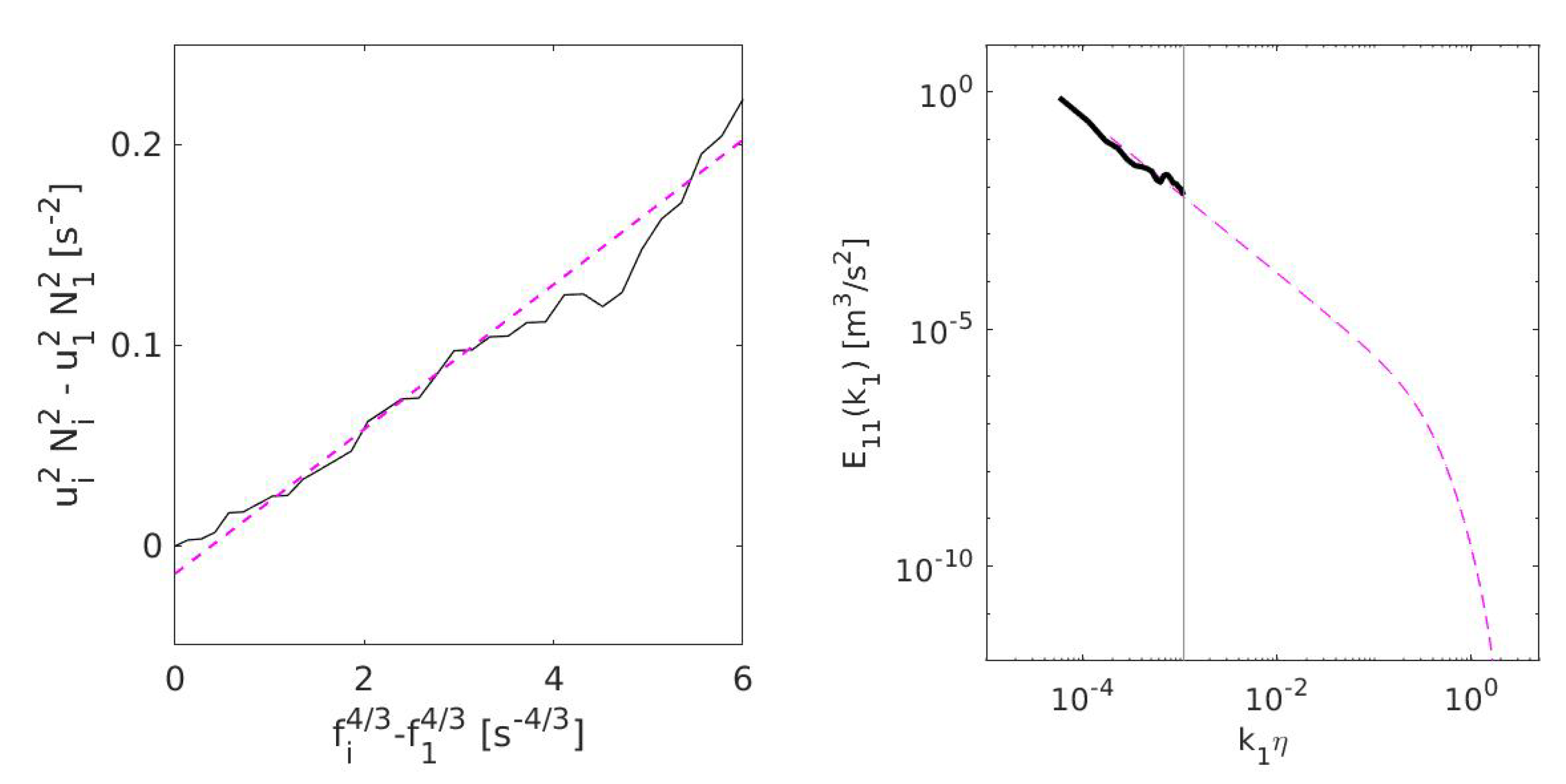
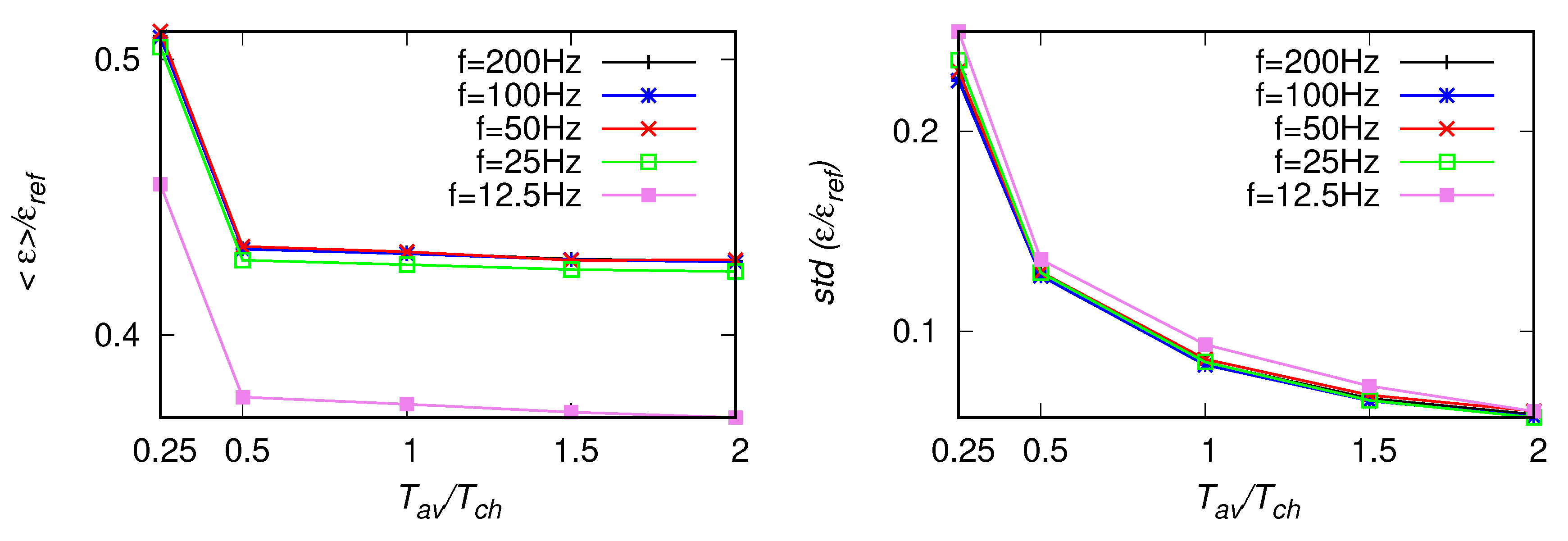
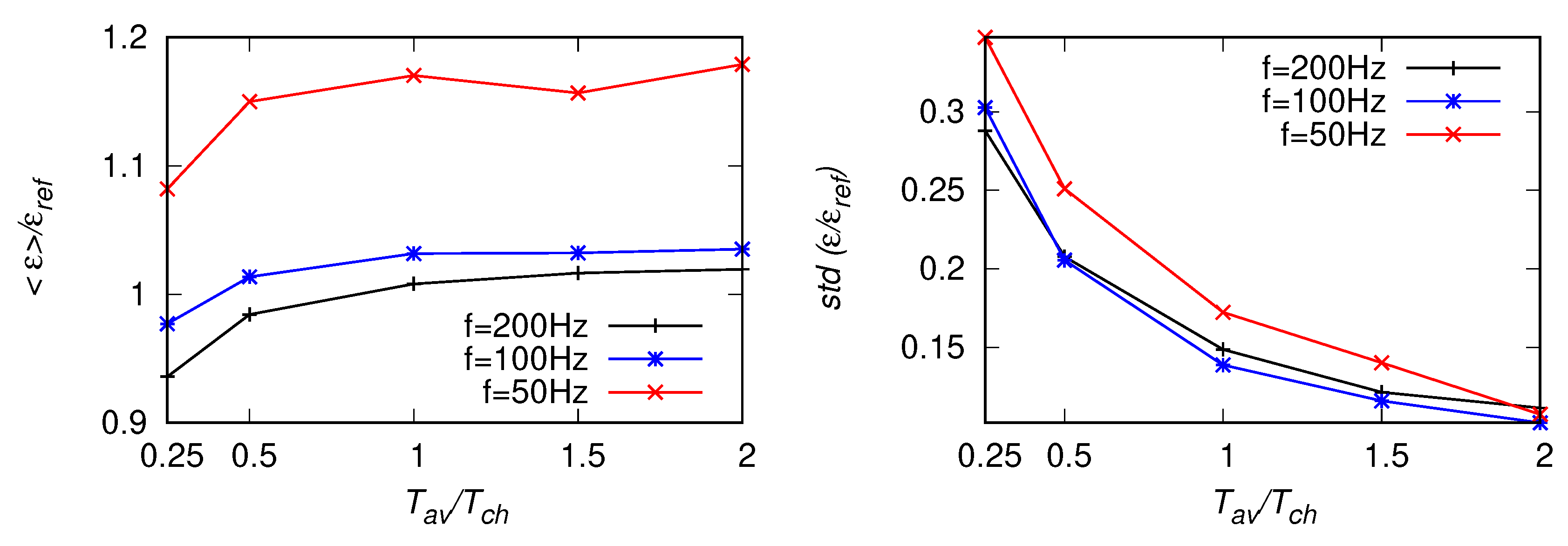
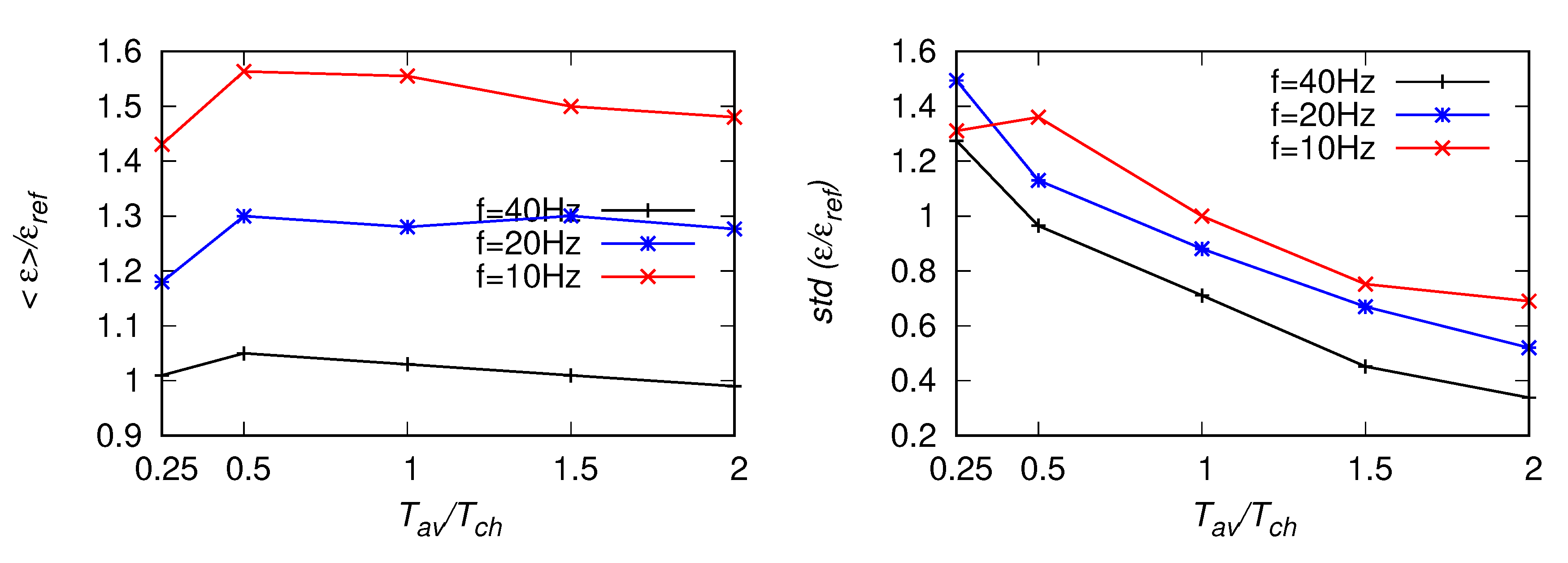
4.2.3. Number of Zero-Crossings
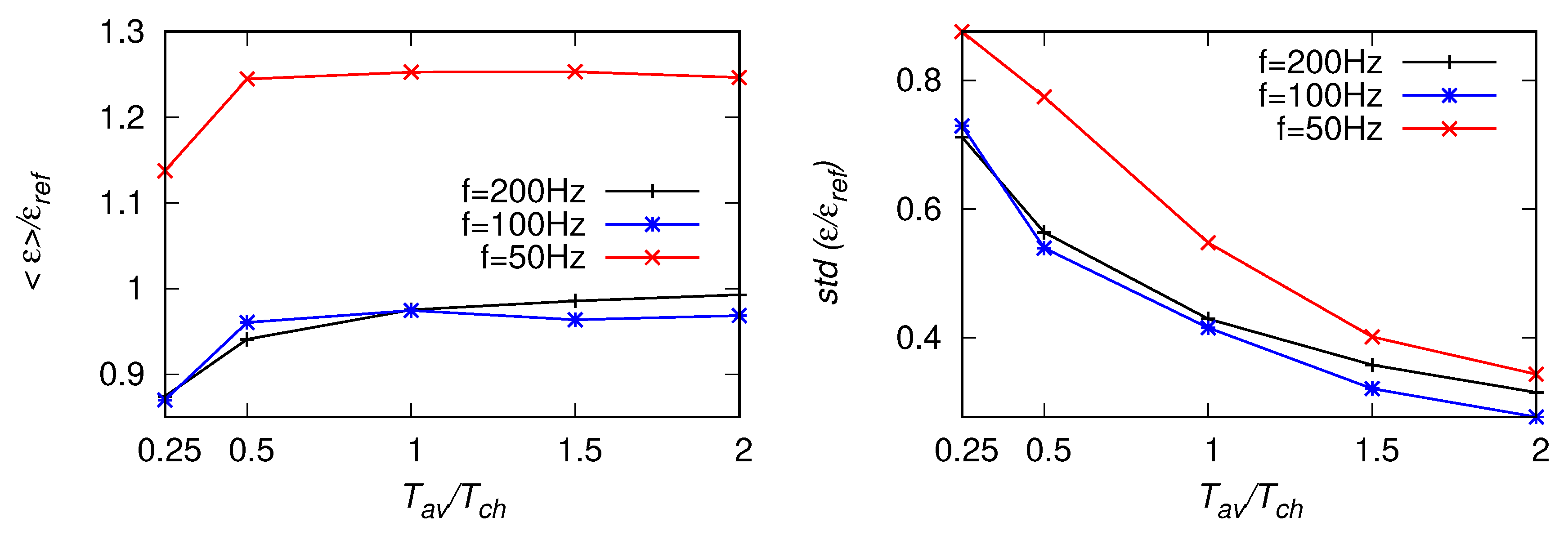
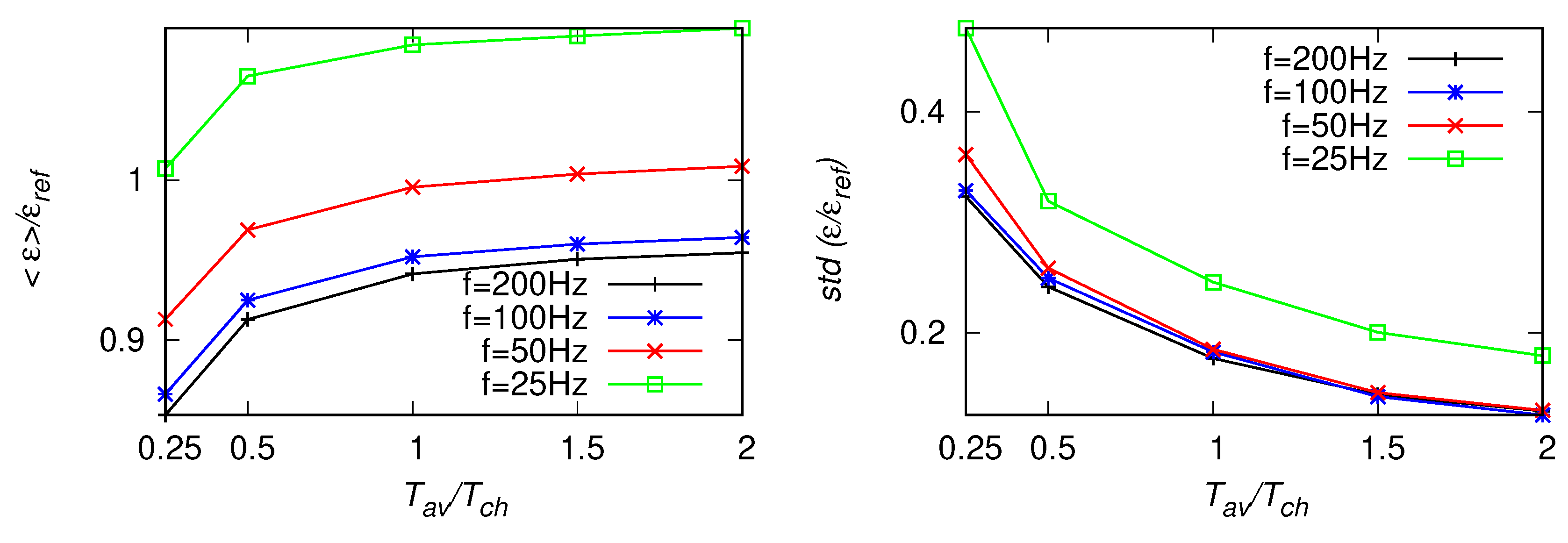
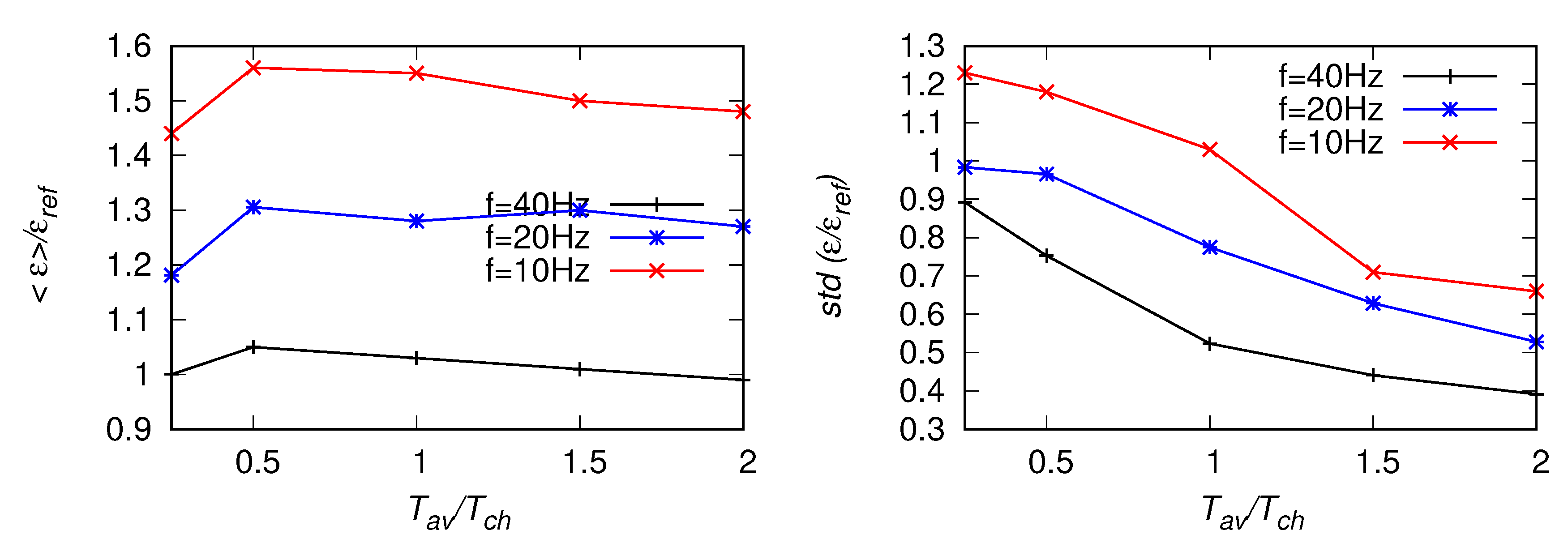
4.2.4. Iterative Method
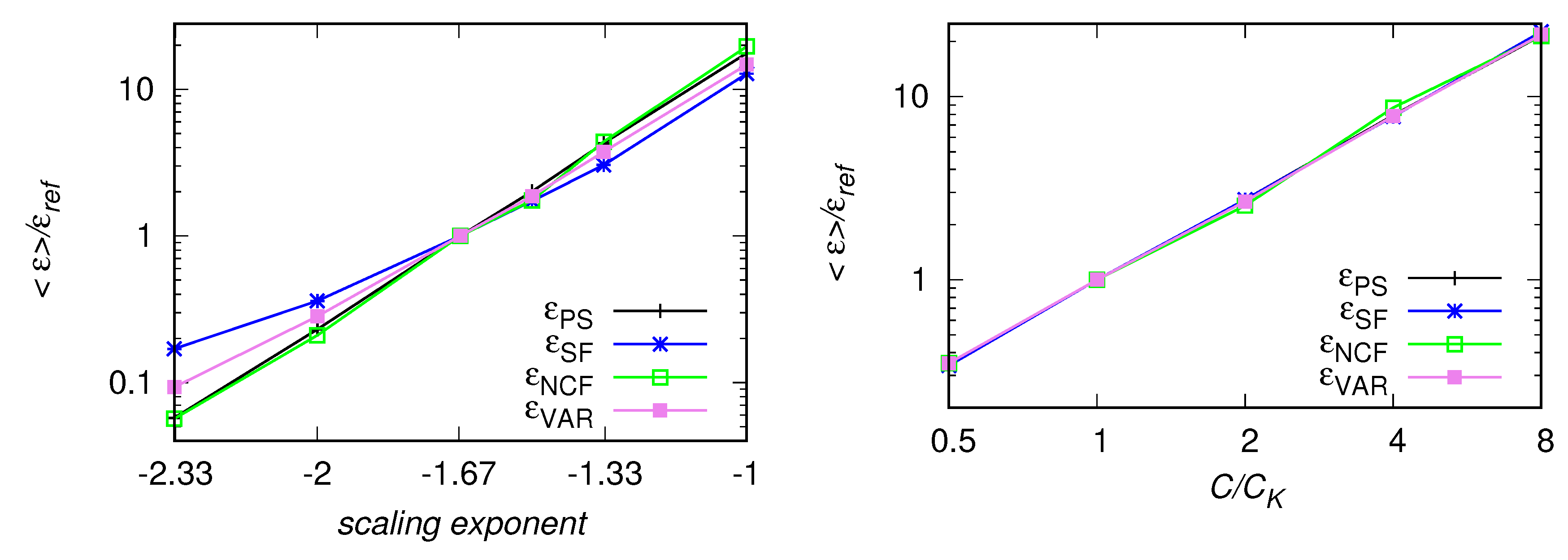
4.3. Deviations from the Kolmogorov’s Scaling
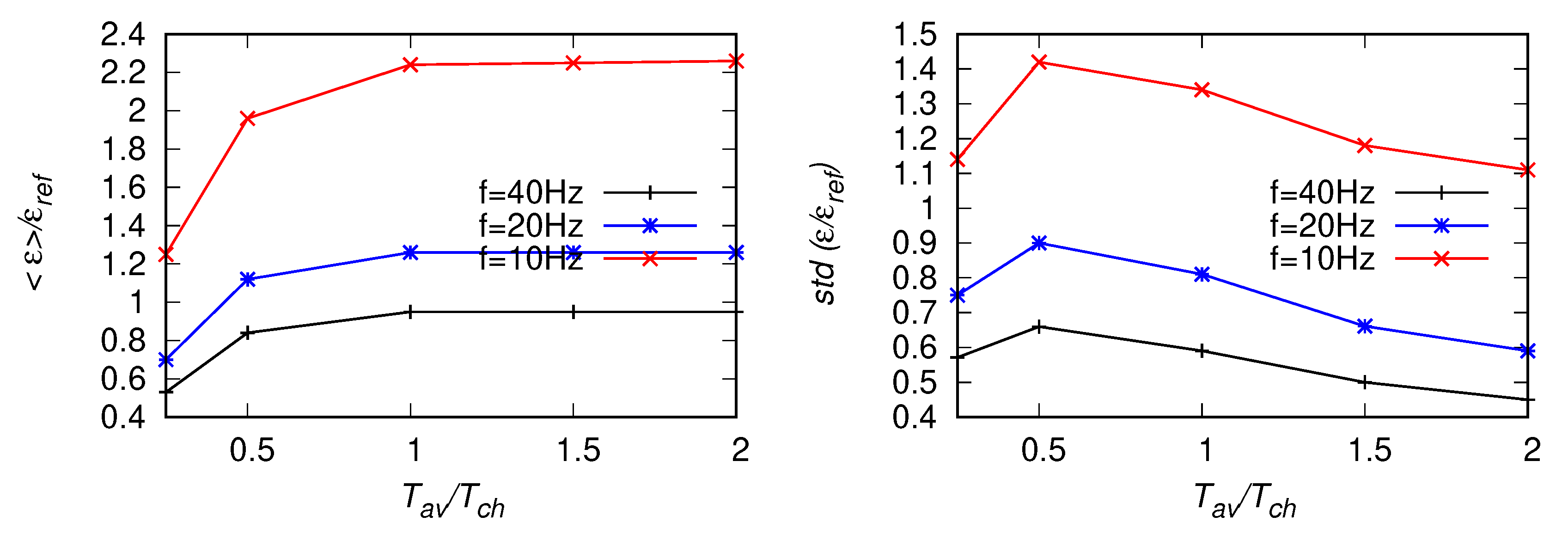
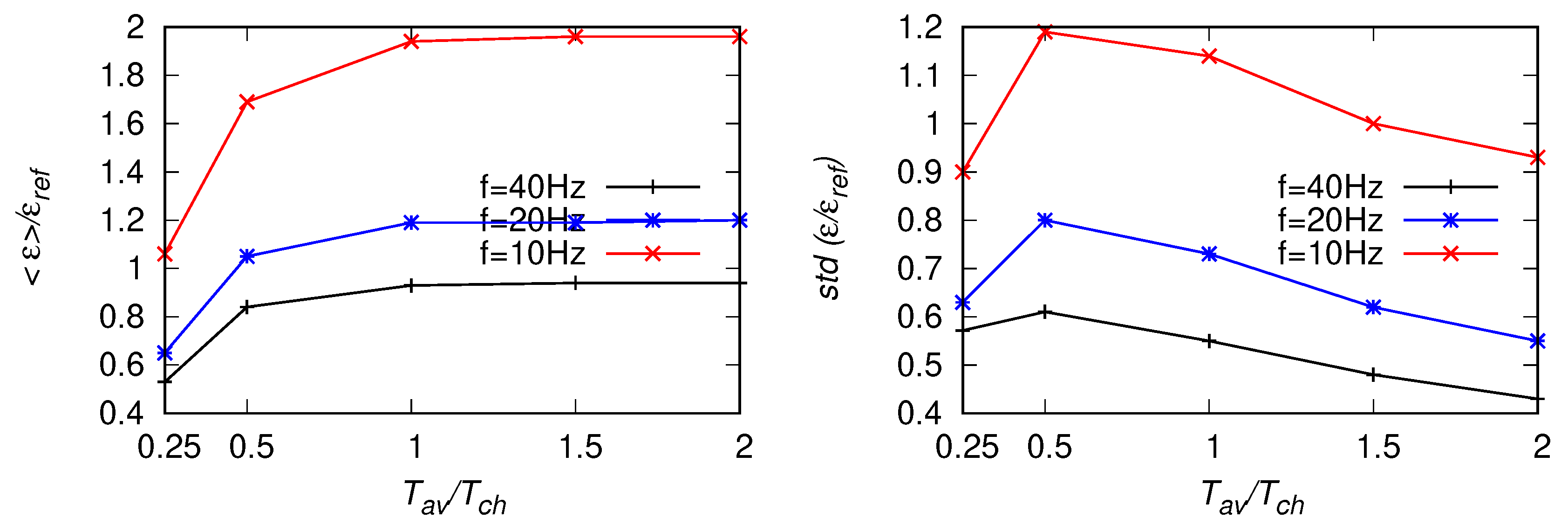
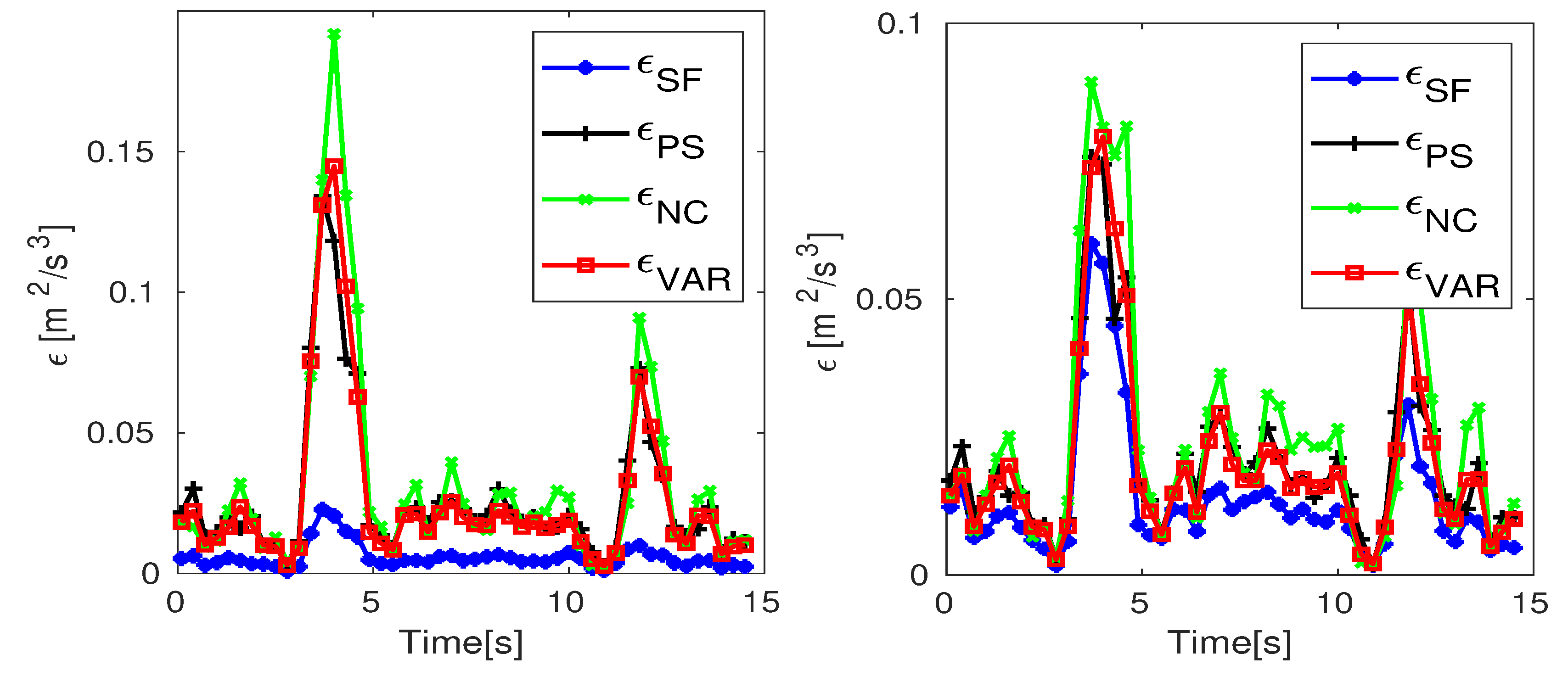
5. EDR Retrieval from POST Signals
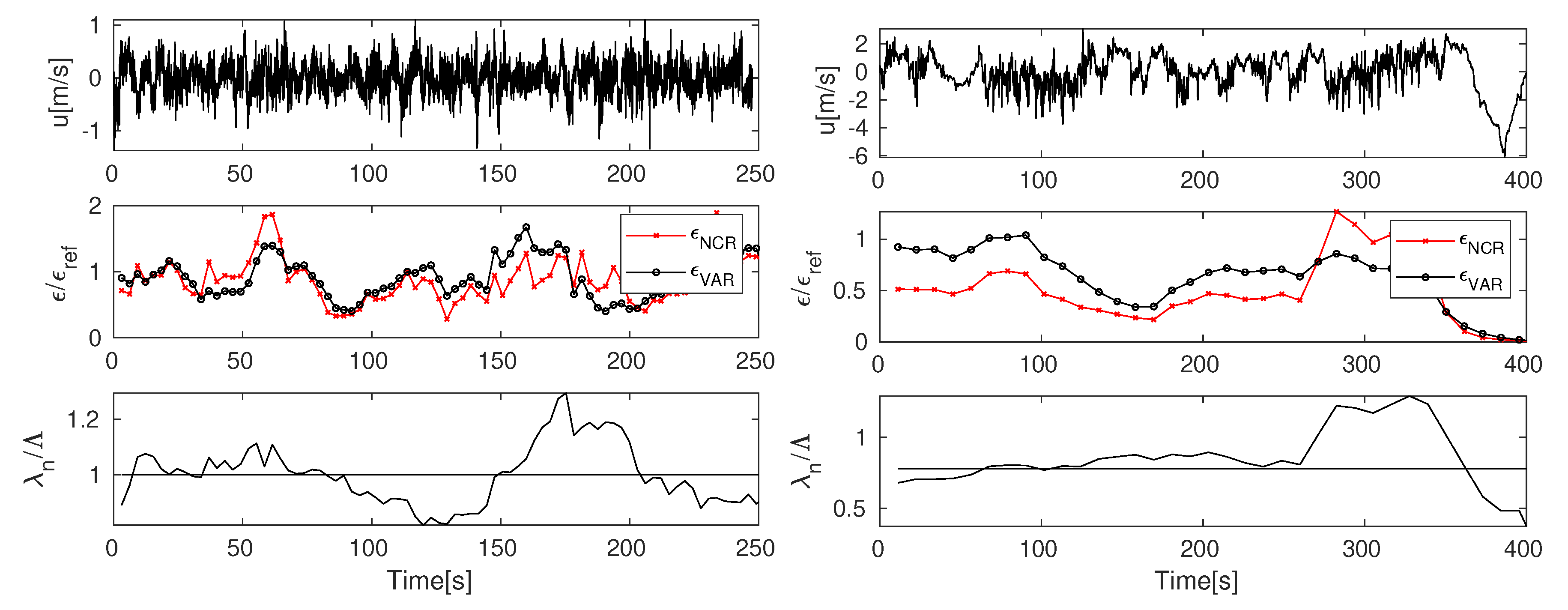
6. Intermittency in Atmospheric Turbulence
7. Discussion
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| EDR | energy dissipation rate |
| PS | power spectra |
| SF | structure function |
| NCF | number of crossings scaling in the inertial range |
| VAR | variance of velocity derivative |
| NCR | number of crossings with spectrum-reconstruction |
References
- Wyngaard, J.C. Turbulence in the Atmosphere; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Stachlewska, I.S.; Zawadzka, O.; Engelmann, R. Effect of Heat Wave Conditions on Aerosol Optical Properties Derived from Satellite and Ground-Based Remote Sensing over Poland. Remote Sens. 2017, 9, 1199. [Google Scholar] [CrossRef] [Green Version]
- Yano, J.I.; Ziemiański, M.Z.; Cullen, M.; Termonia, P.; Onvlee, J.; Bengtsson, L.; Carrassi, A.; Davy, R.; Deluca, A.; Gray, S.L.; et al. Scientific Challenges of Convective-Scale Numerical Weather Prediction. Bull. Am. Meteor. Soc. 2018, 10, 699–710. [Google Scholar] [CrossRef]
- Chamecki, M.; Dias, N.L. The local isotropy hypothesis and the turbulent kinetic energy dissipation rate in the atmospheric surface layer. Q. J. R. Meteorol. Soc. 2004, 130, 2733–2752. [Google Scholar] [CrossRef]
- Matheou, G. Turbulence Structure in a Stratocumulus Cloud. Atmosphere 2018, 9, 392. [Google Scholar] [CrossRef] [Green Version]
- Karimi, M. Direct Numerical Simulation of Fog: The Sensitivity of a Dissipation Phase to Environmental Conditions. Atmosphere 2020, 11, 12. [Google Scholar] [CrossRef] [Green Version]
- Zilitinkevich, S.; Druzhinin, O.; Glazunov, A.; Kadantsev, E.; Mortikov, E.; Repina, I.; Troitskay, Y. Dissipation rate of turbulent kinetic energy in stably stratified sheared flows. Atmos. Chem. Phys. 2019, 19, 2489–2496. [Google Scholar] [CrossRef] [Green Version]
- Akinlabi, E.O.; Wacławczyk, M.; Malinowski, S.P.; Mellado, J.P. Fractal Reconstruction of Sub-Grid Scales for Large Eddy Simulation. Flow Turbulence Combust. 2019, 103, 293. [Google Scholar] [CrossRef] [Green Version]
- Kolmogorov, A.N. Local structure of turbulence in an incompressible fluid at very high Reynolds numbers. Sov. Phys. Usp. 1941, 10, 734–736, reprinted from Dokl. Akad. Nauk SSSR 1941, 30, 299–303.. [Google Scholar] [CrossRef]
- Wacławczyk, M.; Ma, Y.-F.; Kopeć, J.M.; Malinowski, S.P. Novel approaches to estimating turbulent kinetic energy dissipation rate from low and moderate resolution velocity fluctuation time series. Atmos. Meas. Tech. 2017, 10, 4573–4585. [Google Scholar] [CrossRef] [Green Version]
- Akinlabi, E.O.; Wacławczyk, M.; Mellado, J.P.; Malinowski, S.P. Estimating Turbulence Kinetic Energy Dissipation Rates in the Numerically Simulated Stratocumulus Cloud-Top Mixing Layer: Evaluation of Different Methods. J. Atmos. Sci. 2019, 76, 1471–1488. [Google Scholar] [CrossRef] [Green Version]
- Jen-La Plante, I.; Ma, Y.; Nurowska, K.; Gerber, H.; Khelif, D.; Karpinska, K.; Kopec, M.K.; Kumala, W.; Malinowski, S.P. Physics of Stratocumulus Top (POST): Turbulence characteristics. Atmos. Chem. Phys. 2016, 16, 9711–9725. [Google Scholar] [CrossRef] [Green Version]
- Malinowski, S.P.; Gerber, H.; Jen-La Plante, I.; Kopeć, M.K.; Kumala, W.; Nurowska, K.; Chuang, P.Y.; Khelif, D.; Haman, K.E. Physics of Stratocumulus Top (POST): Turbulent mixing across capping inversion. Atmos. Chem. Phys. 2013, 13, 12171–12186. [Google Scholar] [CrossRef] [Green Version]
- Gerber, H.; Frick, G.; Malinowski, S.P.; Jonsson, H.; Khelif, D.; Krueger, S.K. Entrainment rates and microphysics in POST stratocumulus. J. Geophys. Res.-Atmos. 2013, 118, 12094–12109. [Google Scholar] [CrossRef]
- Physics of Stratocumulus Top (POST) Database. Available online: https://www.eol.ucar.edu/projects/post/ (accessed on 1 July 2008).
- Ansorge, C.; Mellado, J.P. Analyses of external and global intermittency in the logarithmic layer of Ekman flow. J. Fluid Mech. 2016, 805, 611–635. [Google Scholar] [CrossRef] [Green Version]
- Pope, S.B. Turbulent Flows; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Taylor, G.I. Statistical theory of turbulence. Proc. R. Soc. A 1935, 151, 421–444. [Google Scholar] [CrossRef] [Green Version]
- Vassilicos, J.C. Dissipation in Turbulent Flows. Annu. Rev. Fluid Mech. 2015, 47, 95–114. [Google Scholar] [CrossRef] [Green Version]
- Devenish, B.J.; Bartello, P.; Brenguier, J.L.; Collins, L.R.; Grabowski, W.W.; IJzermans, R.H.A.; Malinowski, S.P.; Reeks, M.W.; Vassilicos, J.C.; Wang, L.P.; et al. Droplet growth in warm turbulent clouds. Q. J. R. Meteorol. Soc. 2012, 138, 1401–1429. [Google Scholar] [CrossRef]
- Wyszogrodzki, A.A.; Grabowski, W.W.; Wang, L.-P.; Ayala, O. Turbulent collision-coalescence in maritime shallow convection. Atmos. Chem. Phys. 2013, 13, 8471–8487. [Google Scholar] [CrossRef] [Green Version]
- Rosa, B.; Parishani, H.; Ayala, O.; Grabowski, W.W.; Wang, L.-P. Kinematic and dynamic collision statistics of cloud droplets from high-resolution simulations. New J. Phys. 2013, 15, 045032. [Google Scholar] [CrossRef] [Green Version]
- Sreenivasan, K.; Prabhu, A.; Narasimha, R. Zero-crossings inturbulent signals. J. Fluid Mech. 1983, 137, 251–272. [Google Scholar] [CrossRef]
- Poggi, D.; Katul, G.G. Evaluation of the Turbulent Kinetic Energy Dissipation Rate Inside Canopies by Zero- and Level-Crossing Density Methods. Bound.-Layer Meteorol. 2010, 136, 219–233. [Google Scholar] [CrossRef]
- Wang, D.; Szczepanik, D.; Stachlewska, I.S. Interrelations between surface, boundary layer, and columnar aerosol properties derived in summer and early autumn over a continental urban site in Warsaw, Poland. Atmos. Chem. Phys. 2019, 19, 13097–13128. [Google Scholar] [CrossRef] [Green Version]
- D’Asaro, E.; Lee, C.; Rainville, L.; Harcourt, R.; Tomas, L. Enhanced Turbulence and Energy Dissipation at Ocean Fronts. Science 2011, 332, 318. [Google Scholar] [CrossRef] [Green Version]
- Capet, X.; McWilliams, J.C.; Molemaker, M.J.; Shchepetkin, M.J. Mesoscale to submesoscale transition in the california current cystem. Part I: Flow structure, eddy flux, and observational tests. J. Phys. Oceanogr. 2008, 38, 29–42. [Google Scholar] [CrossRef] [Green Version]
- Feraco, F.; Marino, R.; Pumir, A.; Primavera, L.; Mininni, P.D.; Pouquet, A.; Rosenberg, D. Vertical drafts and mixing in stratified turbulence: Sharp transition with Froude number. EPL 2018, 123, 44002. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.H.; Chew, Y.T.; Winoto, S.H. Investigation of Intermittency Measurement Methods for transitional boundary layer flows. Exp. Therm. Fluid Sci. 1996, 12, 433–443. [Google Scholar] [CrossRef]
- Wacławczyk, M.; Oberlack, O. Closure proposals for the tracking of turbulence-agitated gas–liquid interfaces in stratified flows. Int. J. Multiphase Flow 2011, 37, 967–976. [Google Scholar] [CrossRef]
- Wacławczyk, M.; Wacławczyk, T. A priori study for the modelling of velocity–interface correlations in the stratified air–water flows. Int. J. Heat Fluid Flow 2015, 52, 40–49. [Google Scholar] [CrossRef]
- Narita, Y.; Glassmeier, K.-H. Spatial aliasing and distortion of energy distribution in the wavevector domain under multi-spacecraft measurements. Ann. Geophys. 2009, 27, 3031–3042. [Google Scholar] [CrossRef]
- Sharman, R.D.; Cornman, L.B.; Meymaris, G.; Pearson, J.P.; Farrar, T. Description and Derived Climatologies of Automated In Situ Eddy-Dissipation-Rate Reports of Atmospheric Turbulence. J. Appl. Meteorol. Clim. 2014, 53, 1416–1432. [Google Scholar] [CrossRef]
- Balsley, B.B.; Lawrence, D.A.; Fritts, D.C.; Wang, L.; Wan, K.; Werne, J. Fine Structure, Instabilities, and Turbulence in the Lower Atmosphere: High-Resolution In Situ Slant-Path Measurements with the DataHawk UAV and Comparisons with Numerical Modeling. J. Atmos. Oceanic Technol. 2018, 35, 619–642. [Google Scholar] [CrossRef]
- Von Kármán, T. Progress in the statistical theory of turbulence. Proc. Natl. Acad. Sci. USA 1948, 34, 530–539. [Google Scholar] [CrossRef] [Green Version]
- Frehlich, R.; Cornman, L.; Sharman, R. Simulation of Three-Dimensional Turbulent Velocity Fields. J. Appl. Meteorol. 2009, 40, 246–258. [Google Scholar] [CrossRef]
- Butterworth, S. On the theory of filter amplifiers. Exp. Wirel. Wirel. Eng. 1030, 7, 536–541. [Google Scholar]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal Number | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Intermittency parameter | 0.84 | 0.69 | 0.60 | 0.30 |
| 0.84 | 0.72 | 0.57 | 0.35 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wacławczyk, M.; Gozingan, A.S.; Nzotungishaka, J.; Mohammadi, M.; P. Malinowski, S. Comparison of Different Techniques to Calculate Properties of Atmospheric Turbulence from Low-Resolution Data. Atmosphere 2020, 11, 199. https://0-doi-org.brum.beds.ac.uk/10.3390/atmos11020199
Wacławczyk M, Gozingan AS, Nzotungishaka J, Mohammadi M, P. Malinowski S. Comparison of Different Techniques to Calculate Properties of Atmospheric Turbulence from Low-Resolution Data. Atmosphere. 2020; 11(2):199. https://0-doi-org.brum.beds.ac.uk/10.3390/atmos11020199
Chicago/Turabian StyleWacławczyk, Marta, Amoussou S. Gozingan, Jackson Nzotungishaka, Moein Mohammadi, and Szymon P. Malinowski. 2020. "Comparison of Different Techniques to Calculate Properties of Atmospheric Turbulence from Low-Resolution Data" Atmosphere 11, no. 2: 199. https://0-doi-org.brum.beds.ac.uk/10.3390/atmos11020199