
Improving Urban Flood Mapping by Merging Synthetic Aperture Radar-Derived Flood Footprints with Flood Hazard Maps


 ,
, 
Abstract
:1. Introduction
- (a)
- SAR in rural areas,
- (b)
- SAR in rural areas and precomputed FRP maps in urban areas,
- (c)
- SAR in rural areas and FRP maps and dynamic model flood inundation in urban areas,
- (d)
- SAR in both rural and urban areas (with associated urban shadow/layover maps).
2. Materials and Methods
2.1. Flood Foresight System
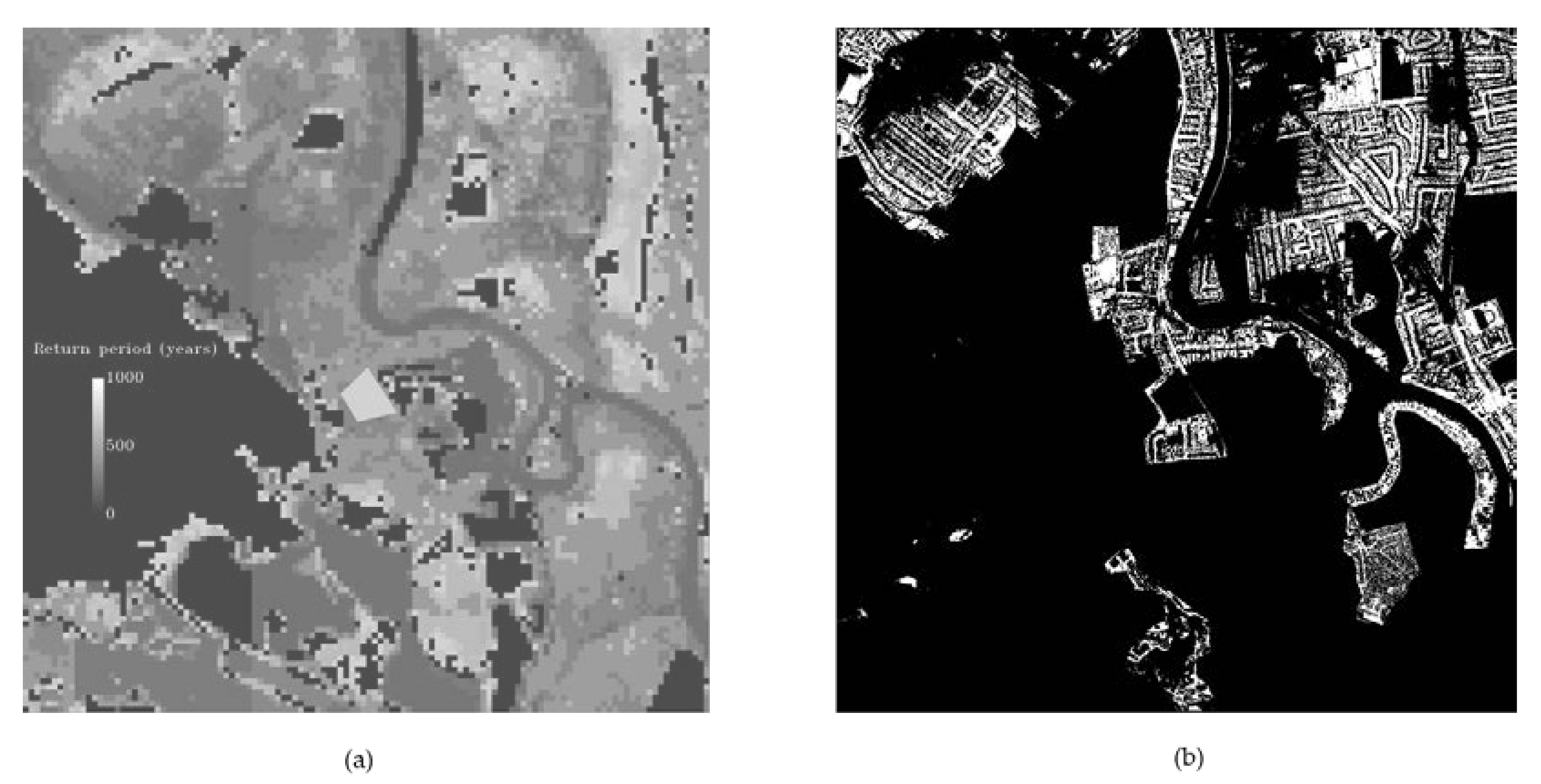
2.1.1. Flood Return-Period Maps
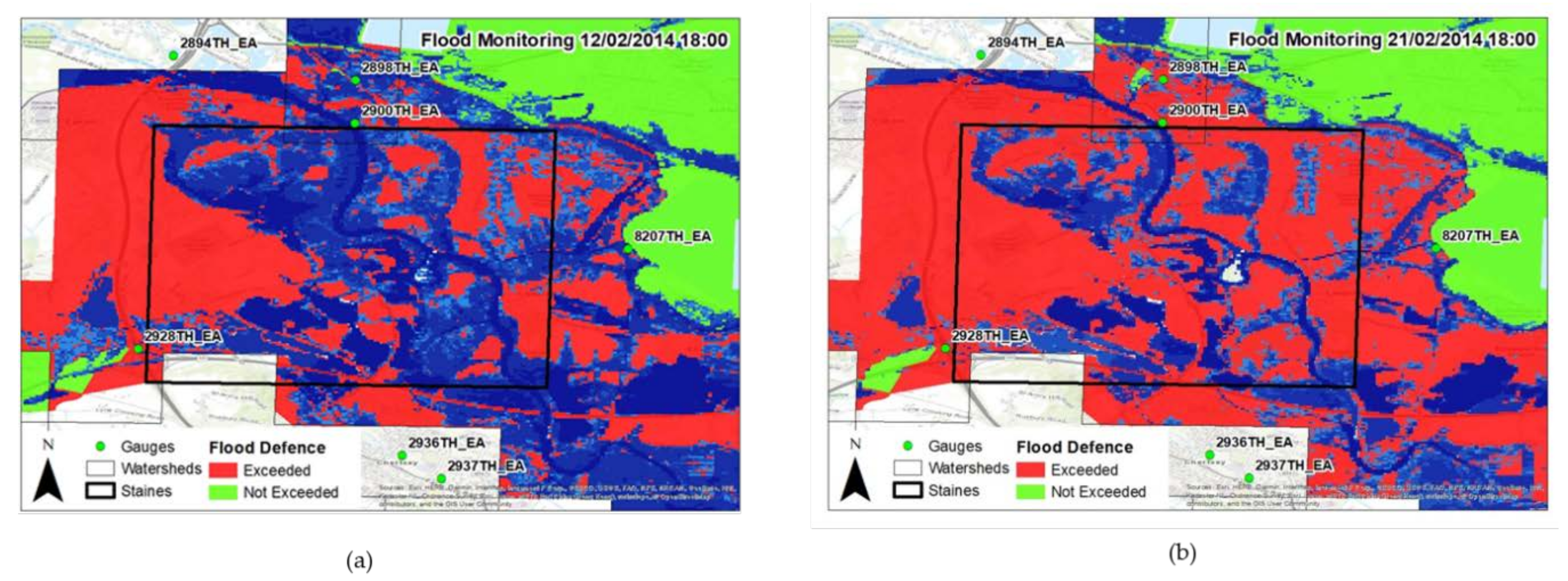
2.1.2. Flood Foresight Model
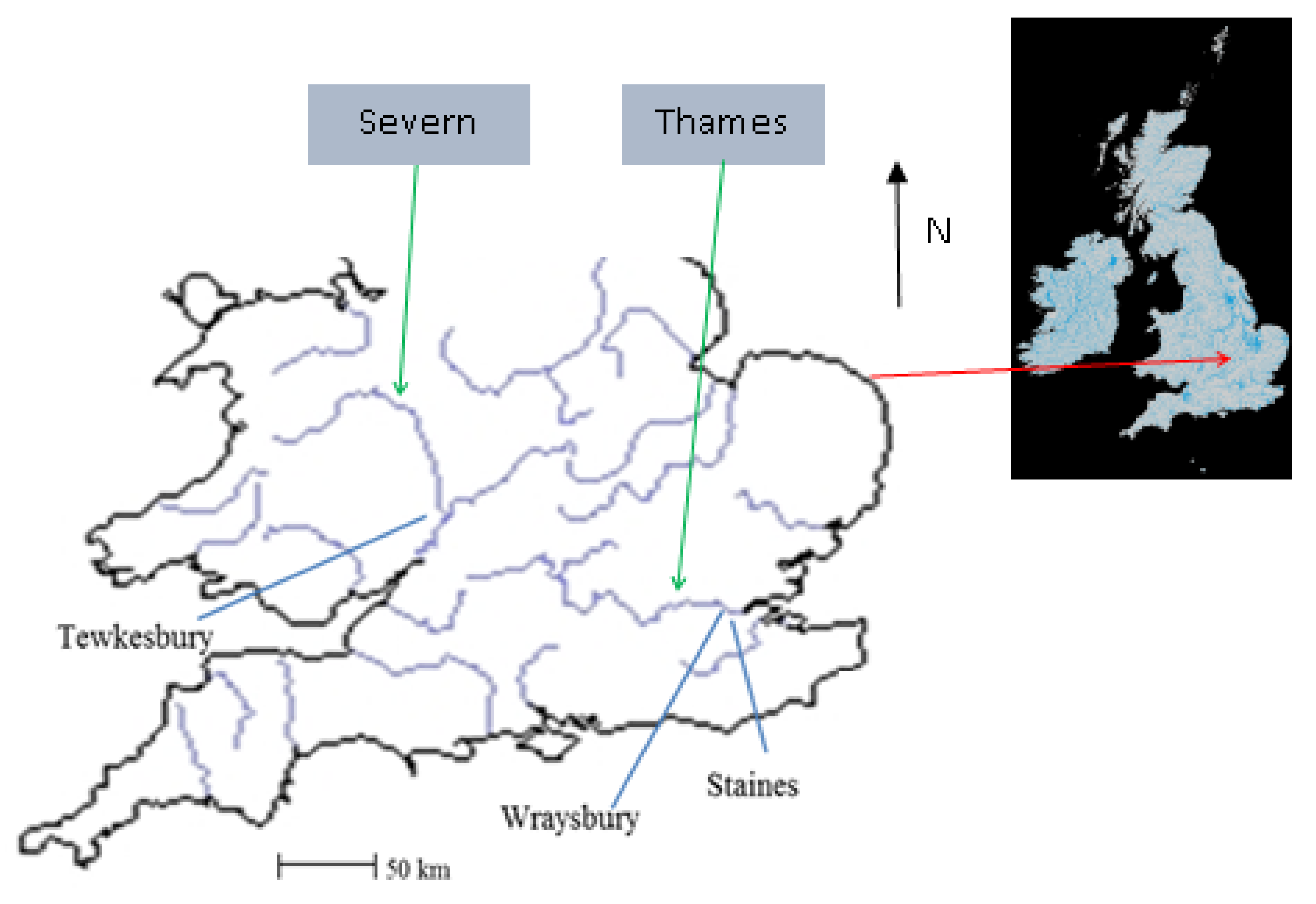
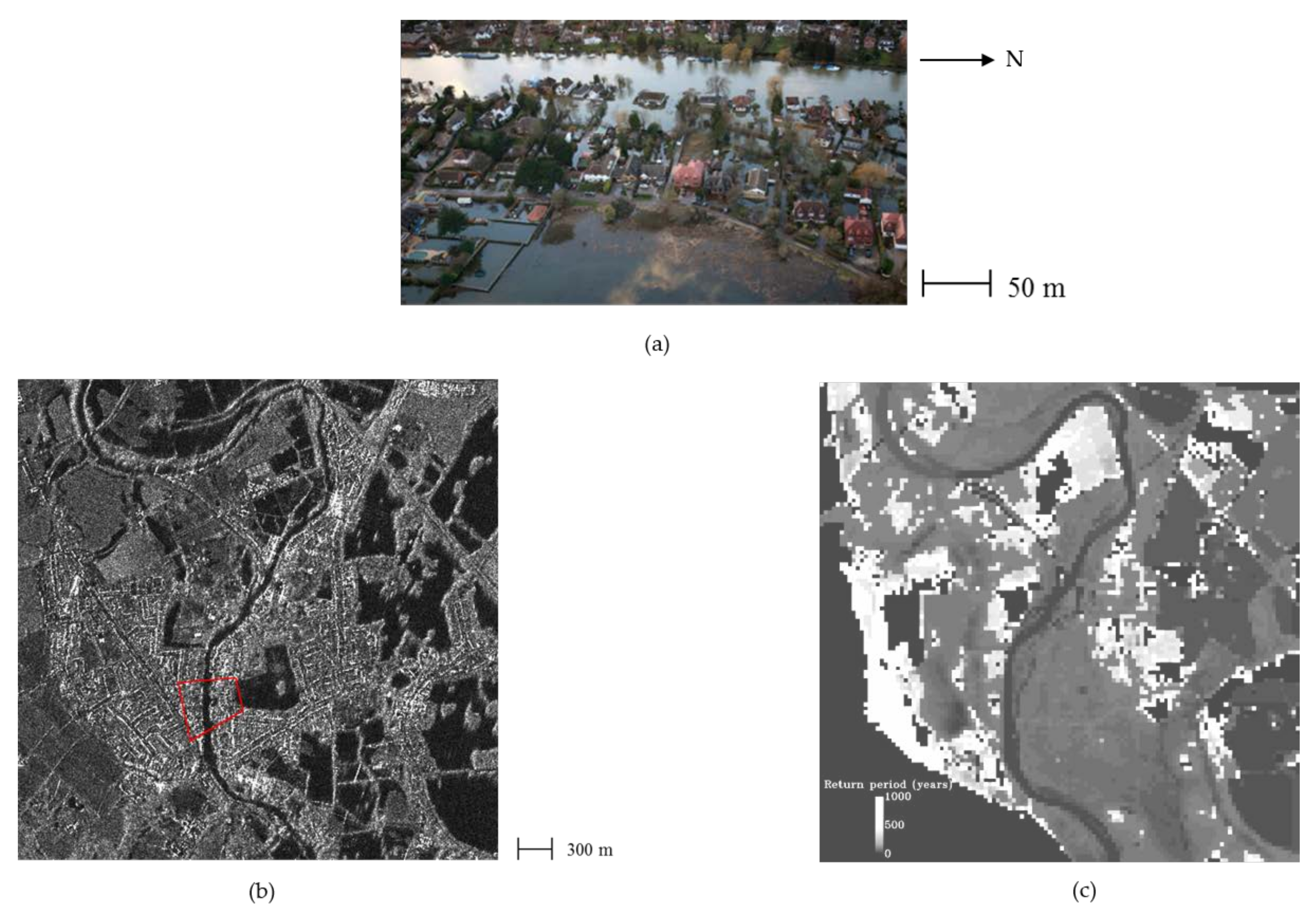
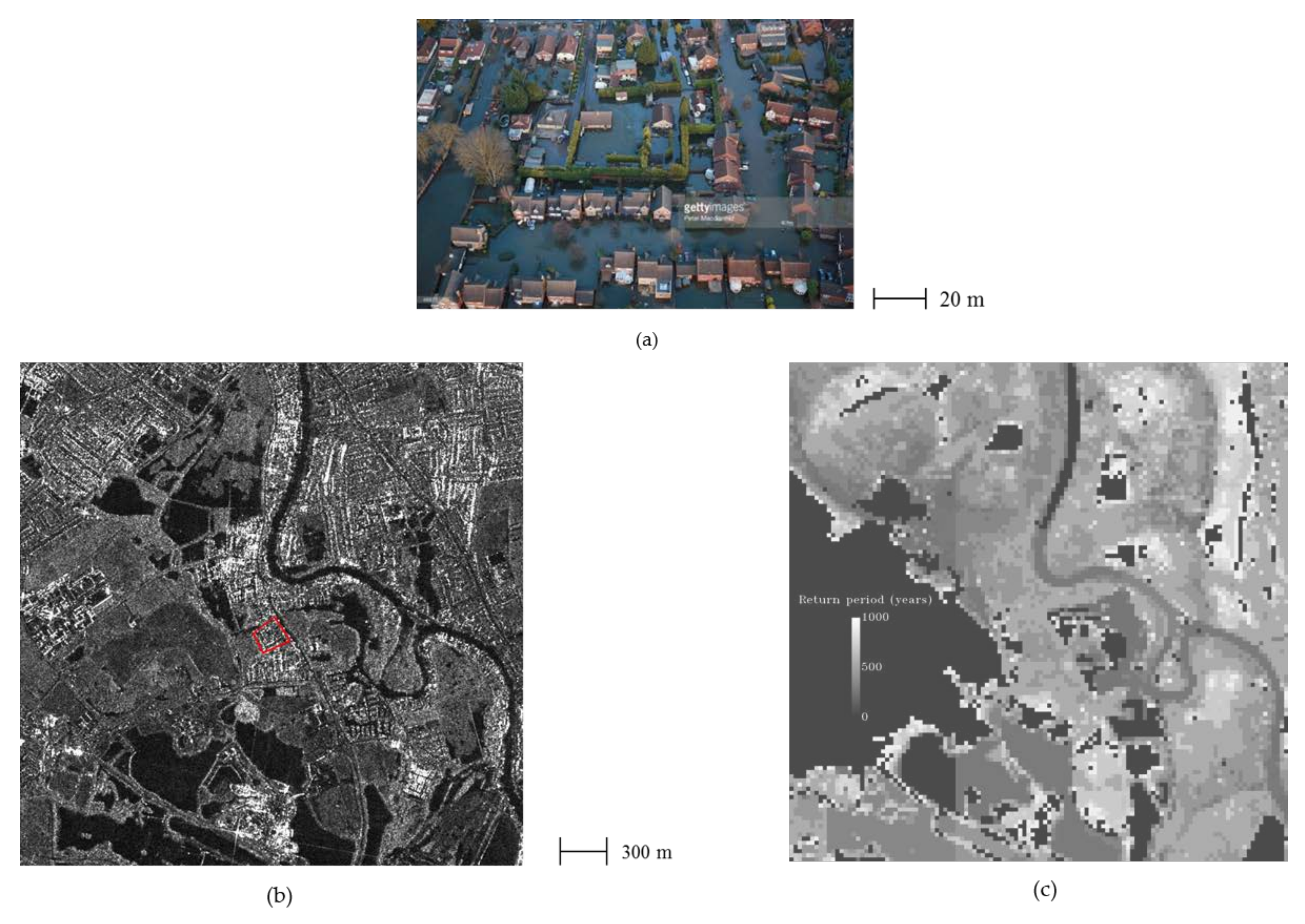
2.2. Study Events and Data Sets
- (a)
- a sequence of 3 CSK images showing flooding in the Wraysbury area on 12, 13 and 14 February 2014 just after the flood peak.
- (b)
- a sequence of 2 CSK images on 13 and 14 February 2014 also showing flooding in Staines, where on 13 February the flow was still only 5% less than the peak. A contemporaneous aerial photo for validation was acquired showing flooding in Blackett Close, Staines.
2.3. Method
2.3.1. Preprocessing Operations
SAR
Flood Return-Period Maps
2.3.2. Near Real-Time Operations
SAR
Flood Foresight Model Output
Near Real-Time Combined Processing
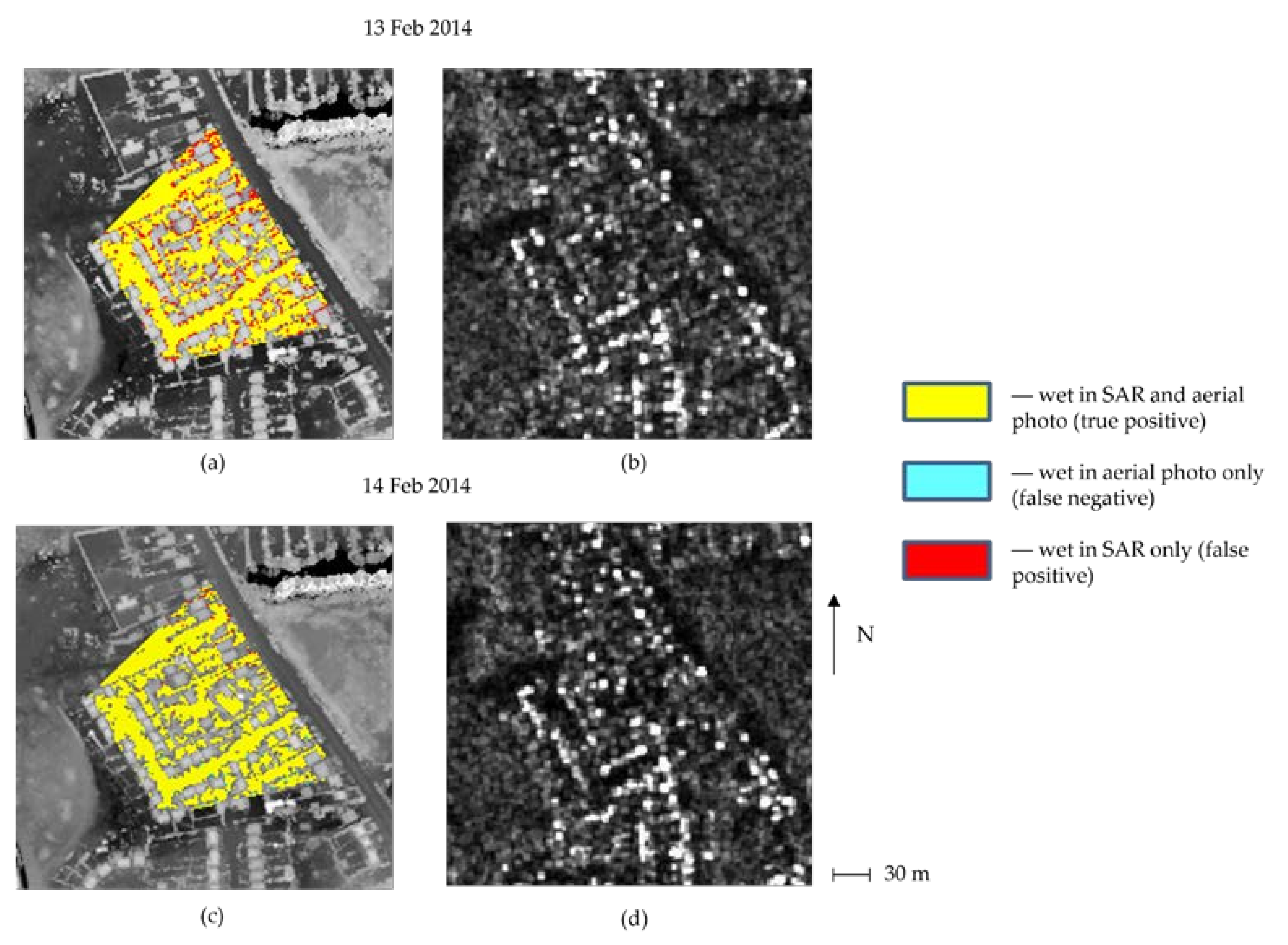
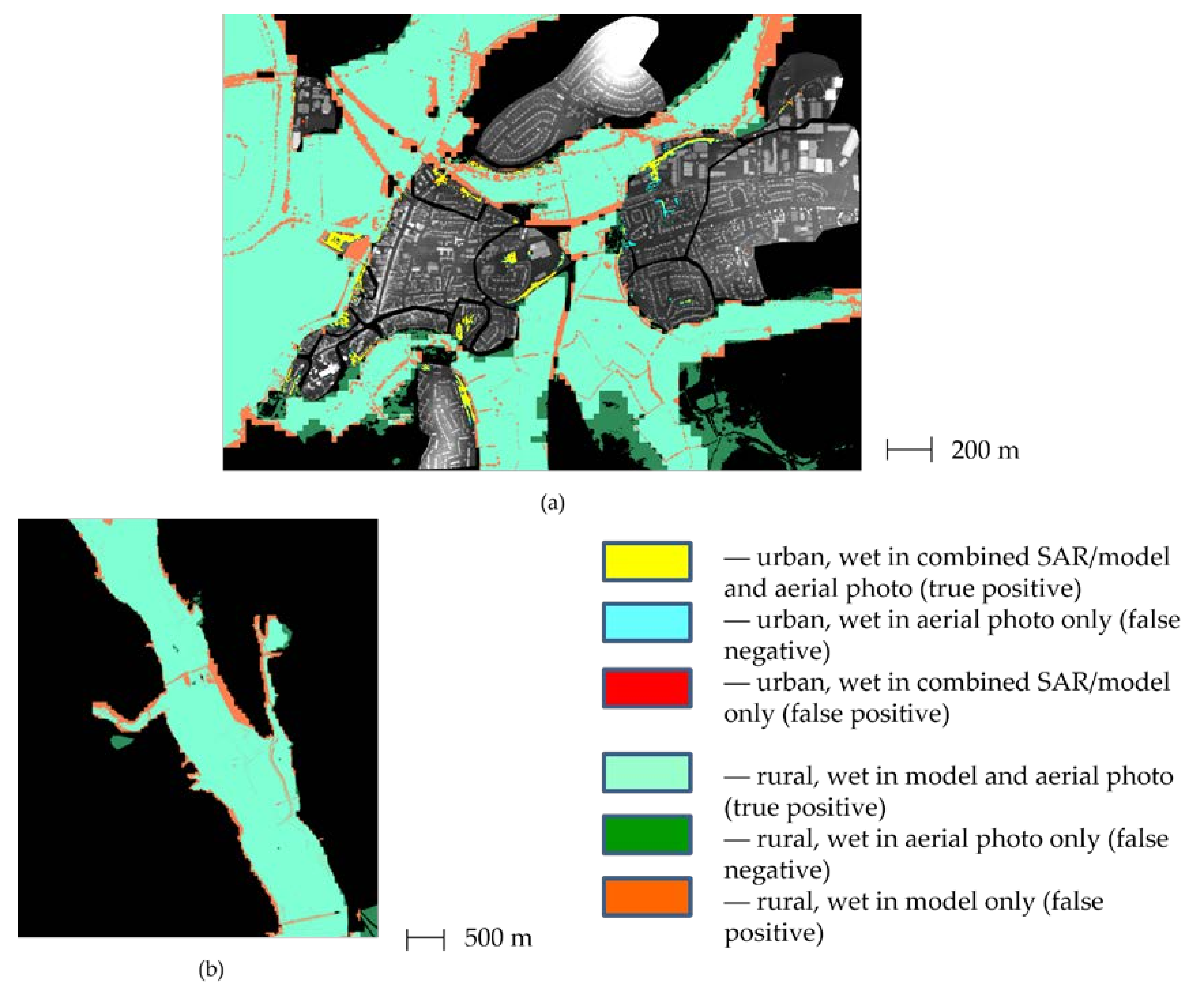
2.3.3. Performance Measures
3. Results
3.1. Case 1: Results Using Rural SAR Data Only
3.2. Case 2: Results Using Rural SAR Data and Pre-Computed FRP Maps
3.3. Case 3: Results Using Rural SAR Data, Precomputed FRP Maps, and Dynamic Flood Foresight Model Flood Extents
4. Discussion
5. Conclusions
- (1)
- Simply by using the rural SAR WLOs alone as in Case 1, a high urban flood detection accuracy (94%) and low false positive rate (9%) were achieved. However, this simple method cannot prevent urban areas that are low but defended from flooding from being detected as flooded.
- (2)
- (3)
- The Case 2 method using rural SAR data and precomputed FRP maps should in theory have an advantage over the simple Case 1, as the flood return-period maps may contain information on defended regions in the urban area. There were no examples of this in the test areas, and consequently, the results for Case 1 and Case 2 were very similar. However, the potential advantage of using FRP maps was illustrated by simulating a defended region. In addition, the high accuracy obtained using the Case 2 method confirmed the findings of Tanguy et al. (2017) [43], who merged FRP maps with flood inundation maps derived from RADARSAT-2.
- (4)
- Where the dynamic Flood Foresight model flood extents were combined with the rural SAR and FRP data (Case 3), then, for the Tewkesbury example, the rural SAR WLOs were able to provide a significant improvement compared to using model data alone, because there was significant surface-water flooding that was not reflected in the fluvially modelled flood extents. For the Blackett Close example, the classification improvement achieved by combining the rural SAR WLOs with the Flood Foresight model output was fairly marginal. However, it is interesting that, for these two examples, the results were almost no worse (indeed, for Tewkesbury, rather better), than if no dynamic model flood extents were used and the urban flood extent was predicted simply using rural SAR data and precomputed FRP maps (Case 2).
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Aerts, J.C.J.H.; Botzen, W.J.; Clarke, K.; Cutter, S.L.; Hall, J.W.; Merz, B.; Michel-Kerjan, E.; Mysiak, J.; Surminski, S.; Kunreuther, H. Integrating human behaviour dynamics into flood disaster risk assessment. Nat. Clim. Chang. 2018, 8, 193–199. [Google Scholar] [CrossRef] [Green Version]
- Sharifi, A. Resilient urban forms: A macro-scale analysis. Cities 2019, 85, 1–14. [Google Scholar] [CrossRef]
- García-Soriano, D.; Quesada-Román, A.; Zamorano-Orozco, J.J. Geomorphological hazards susceptibility in high-density urban areas: A case study of Mexico City. J. South Am. Earth Sci. 2020, 102, 102667. [Google Scholar] [CrossRef]
- Quesada-Román, A.; Villalobos-Chacón, A. Flash flood impacts of Hurricane Otto and hydrometeorological risk mapping in Costa Rica. Geogr. Tidsskr. J. Geogr. 2020, 120, 142–155. [Google Scholar] [CrossRef]
- Evans, E.P.; Ashley, R.; Hall, J.W.; Penning-Rowsell, E.C.; Saul, A.; Sayers, P.B.; Thorne, C.R.; Watkinson, A. Foresight Flood and Coastal Defence Project: Scientific Summary; Office of Science and Technology: London, UK, 2004. [Google Scholar]
- Winsemius, H.C.; Aerts, J.C.J.H.; Van Beek, L.P.H.; Bierkens, M.F.P.; Bouwman, A.; Jongman, B.; Kwadijk, J.C.J.; Ligtvoet, W.; Lucas, P.L.; Van Vuuren, D.P.; et al. Global drivers of future river flood risk. Nat. Clim. Chang. 2016, 6, 381–385. [Google Scholar] [CrossRef]
- Willner, S.N.; Otto, C.; Levermann, A. Global economic response to river floods. Nat. Clim. Chang. 2018, 8, 594–598. [Google Scholar] [CrossRef]
- Li, Y.; Martinis, S.; Wieland, M.; Schlaffer, S.; Natsuaki, R. Urban Flood Mapping Using SAR Intensity and Interferometric Coherence via Bayesian Network Fusion. Remote Sens. 2019, 11, 2231. [Google Scholar] [CrossRef] [Green Version]
- ICEYE. SAR Satelite Data Provider. Available online: https://www.iceye.com/sar-data/constellation-capabilities (accessed on 1 June 2021).
- Pitt, M. Learning Lessons from the 2007 Floods. UK Cabinet Office Report. June 2008. Available online: http://archive.cabinetoffice.gov.uk/pittreview/thepittreview.html (accessed on 1 June 2021).
- Brown, K.M.; Hambridge, C.H.; Brownett, J.M. Progress in operational flood mapping using satellite SAR and airborne LiDAR data. Prog. Phys. Geog. Earth Environ. 2016, 40, 186–214. [Google Scholar] [CrossRef]
- Grimaldi, S.; Li, Y.; Pauwels, V.; Walker, J.P. Remote Sensing-Derived Water Extent and Level to Constrain Hydraulic Flood Forecasting Models: Opportunities and Challenges. Surv. Geophys. 2016, 37, 977–1034. [Google Scholar] [CrossRef]
- García-Pintado, J.; Neal, J.C.; Mason, D.C.; Dance, S.L.; Bates, P.D. Scheduling satellite-based SAR acquisition for sequential assimilation of water level observations into flood modelling. J. Hydrol. 2013, 495, 252–266. [Google Scholar] [CrossRef] [Green Version]
- García-Pintado, J.; Mason, D.C.; Dance, S.L.; Cloke, H.L.; Neal, J.C.; Freer, J.; Bates, P.D. Satellite-supported flood forecasting in river networks: A real case study. J. Hydrol. 2015, 523, 706–724. [Google Scholar] [CrossRef] [Green Version]
- Mason, D.; Schumann, G.-P.; Neal, J.; Garcia-Pintado, J.; Bates, P. Automatic near real-time selection of flood water levels from high resolution Synthetic Aperture Radar images for assimilation into hydraulic models: A case study. Remote Sens. Environ. 2012, 124, 705–716. [Google Scholar] [CrossRef] [Green Version]
- Giustarini, L.; Hostache, R.; Kavetski, D.; Chini, M.; Corato, G.; Schlaffer, S.; Matgen, P. Probabilistic Flood Mapping Using Synthetic Aperture Radar Data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6958–6969. [Google Scholar] [CrossRef]
- Hostache, R.; Chini, M.; Giustarini, L.; Neal, J.; Kavetski, D.; Wood, M.; Corato, G.; Pelich, R.-M.; Matgen, P. Near-Real-Time Assimilation of SAR-Derived Flood Maps for Improving Flood Forecasts. Water Resour. Res. 2018, 54, 5516–5535. [Google Scholar] [CrossRef]
- Cooper, E.S.; Dance, S.L.; García-Pintado, J.; Nichols, N.K.; Smith, P.J. Observation operators for assimilation of satellite observations in fluvial inundation forecasting. Hydrol. Earth Syst. Sci. 2019, 23, 2541–2559. [Google Scholar] [CrossRef] [Green Version]
- Cooper, E.; Dance, S.; García-Pintado, J.; Nichols, N.; Smith, P. Observation impact, domain length and parameter estimation in data assimilation for flood forecasting. Environ. Model. Softw. 2018, 104, 199–214. [Google Scholar] [CrossRef] [Green Version]
- Martinis, S.; Twele, A.; Voigt, S. Towards operational near real-time flood detection using a split-based automatic thresholding procedure on high resolution TerraSAR-X data. Nat. Hazards Earth Syst. Sci. 2009, 9, 303–314. [Google Scholar] [CrossRef]
- Martinis, S.; Twele, A.; Voigt, S. Unsupervised Extraction of Flood-Induced Backscatter Changes in SAR Data Using Markov Image Modeling on Irregular Graphs. IEEE Trans. Geosci. Remote Sens. 2011, 49, 251–263. [Google Scholar] [CrossRef]
- Martinis, S.; Kersten, J.; Twele, A. A fully automated TerraSAR-X based flood service. ISPRS J. Photogramm. Remote Sens. 2015, 104, 203–212. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Chini, M.; Pierdicci, N.; Guerriero, L.; Ferrazzoli, P. Flood monitoring using multi-temporal COSMO-SkyMed data: Image segmentation and signature interpretation. Remote Sens. Environ. 2011, 115, 990–1002. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Pierdicca, N.; Chini, M.; Guerriero, L. An algorithm for operational flood mapping from Synthetic Aperture Radar (SAR) data using fuzzy logic. Nat. Hazards Earth Syst. Sci. 2011, 11, 529–540. [Google Scholar] [CrossRef] [Green Version]
- Twele, A.; Cao, W.; Plank, S.; Martinis, S. Sentinel-1-based flood mapping: A fully automated processing chain. Int. J. Remote Sens. 2016, 37, 2990–3004. [Google Scholar] [CrossRef]
- D’Addabbo, A.; Refice, A.; Pasquariello, G.; Lovergine, F.P.; Capolongo, D.; Manfreda, S. A Bayesian Network for Flood Detection Combining SAR Imagery and Ancillary Data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3612–3625. [Google Scholar] [CrossRef]
- D’Addabbo, A.; Refice, A.; Lovergine, F.P.; Pasquariello, G. DAFNE: A Matlab toolbox for Bayesian multi-source remote sensing and ancillary data fusion, with application to flood mapping. Comput. Geosci. 2018, 112, 64–75. [Google Scholar] [CrossRef]
- Matgen, P.; Hostache, R.; Schumann, G.; Pfister, L.; Hoffmann, L.; Savenije, H. Towards an automated SAR-based flood monitoring system: Lessons learned from two case studies. Phys. Chem. Earth Parts A/B/C 2011, 36, 241–252. [Google Scholar] [CrossRef]
- Giustarini, L.; Hostache, R.; Matgen, P.; Schumann, G.; Bates, P.D.; Mason, D.C. A change detection approach to flood mapping in urban areas using TerraSAR-X. IEEE. Trans. Geosci. Remote Sens. 2013, 51, 2417–2430. [Google Scholar] [CrossRef] [Green Version]
- Pierdicca, N.; Pulvirenti, L.; Chini, M.; Guerriero, L.; Candela, L. Observing floods from space: Experience gained from COSMO-SkyMed observations. Acta Astronaut 2013, 84, 122–133. [Google Scholar] [CrossRef]
- Schumann, G.; di Baldassarre, G.D.; Bates, P.D. The utility of spaceborne radar to render flood inundation maps based on multialgorithm ensembles. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2801–2807. [Google Scholar] [CrossRef]
- Schlaffer, S.; Chini, M.; Giustarini, L.; Matgen, P. Probabilistic mapping of flood-induced backscatter changes in SAR time series. Int. J. Appl. Earth Obs. Geoinf. 2017, 56, 77–87. [Google Scholar] [CrossRef]
- Westerhoff, R.S.; Kleuskens, M.P.H.; Winsemius, H.C.; Huizinga, H.J.; Brakenridge, G.R.; Bishop, C. Automated global water mapping based on wide-swath orbital synthetic-aperture radar. Hydrol. Earth Syst. Sci. 2013, 17, 651–663. [Google Scholar] [CrossRef] [Green Version]
- Benoudjit, A.; Guida, R. A Novel Fully Automated Mapping of the Flood Extent on SAR Images Using a Supervised Classifier. Remote Sens. 2019, 11, 779. [Google Scholar] [CrossRef] [Green Version]
- Nemni, E.; Bullock, J.; Belabbes, S.; Bromley, L. Fully Convolutional Neural Network for Rapid Flood Segmentation in Synthetic Aperture Radar Imagery. Remote Sens. 2020, 12, 2532. [Google Scholar] [CrossRef]
- Ohki, M.; Yamamoto, K.; Tadono, T.; Yoshimura, K. Automated Processing for Flood Area Detection Using ALOS-2 and Hydrodynamic Simulation Data. Remote Sens. 2020, 12, 2709. [Google Scholar] [CrossRef]
- Soergel, U.; Thoennessen, U.; Stilla, U. Visibility analysis of man-made objects in SAR images. In Proceedings of the 2003 2nd GRSS/ISPRS Joint Workshop on Remote Sensing and Data Fusion over Urban Areas, Berlin, Germany, 22–23 May 2003. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Chini, M.; Pierdicca, N.; Boni, G. Use of SAR Data for Detecting Floodwater in Urban and Agricultural Areas: The Role of the Interferometric Coherence. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1532–1544. [Google Scholar] [CrossRef]
- Mason, D.C.; Speck, R.; Devereux, B.; Schumann, G.J.-P.; Neal, J.C.; Bates, P.D. Flood detection in urban areas using TerraSAR-X. IEEE. Trans. Geosci. Remote Sens. 2010, 48, 882–894. [Google Scholar] [CrossRef] [Green Version]
- Mason, D.C.; Davenport, I.; Neal, J.C.; Schumann, G.; Bates, P.D. Near Real-Time Flood Detection in Urban and Rural Areas Using High-Resolution Synthetic Aperture Radar Images. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3041–3052. [Google Scholar] [CrossRef] [Green Version]
- Mason, D.; Giustarini, L.; Garcia-Pintado, J.; Cloke, H. Detection of flooded urban areas in high resolution Synthetic Aperture Radar images using double scattering. Int. J. Appl. Earth Obs. Geoinf. 2014, 28, 150–159. [Google Scholar] [CrossRef] [Green Version]
- Mason, D.C.; Dance, S.L.; Vetra-Carvalho, S.; Cloke, H.L. Robust algorithm for detecting floodwater in urban areas using synthetic aperture radar images. J. Appl. Remote Sens. 2018, 12, 045011. [Google Scholar] [CrossRef] [Green Version]
- Tanguy, M.; Chokmani, K.; Bernier, M.; Poulin, J.; Raymond, S. River flood mapping in urban areas combining Radarsat-2 data and flood return period data. Remote Sens. Environ. 2017, 198, 442–459. [Google Scholar] [CrossRef] [Green Version]
- Chini, M.; Pelich, R.-M.; Pulvirenti, L.; Pierdicca, N.; Hostache, R.; Matgen, P. Sentinel-1 InSAR Coherence to Detect Floodwater in Urban Areas: Houston and Hurricane Harvey as A Test Case. Remote Sens. 2019, 11, 107. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Martinis, S.; Wieland, M. Urban flood mapping with an active self-learning convolutional neural network based on TerraSAR-X intensity and interferometric coherence. ISPRS J. Photogramm. Remote Sens. 2019, 152, 178–191. [Google Scholar] [CrossRef]
- Lin, Y.N.; Yun, S.-H.; Bhardwaj, A.; Hill, E.M. Urban Flood Detection with Sentinel-1 Multi-Temporal Synthetic Aperture Radar (SAR) Observations in a Bayesian Framework: A Case Study for Hurricane Matthew. Remote Sens. 2019, 11, 1778. [Google Scholar] [CrossRef]
- Iervolini, P.; Guida, R.; Iodice, A.; Riccio, D. Flooding water depth estimation with high-resolution SAR. IEEE Trans. GeoSci. Remote Sens. 2015, 53, 2295–2307. [Google Scholar] [CrossRef] [Green Version]
- Mason, D.C.; Dance, S.L.; Cloke, H.L. Floodwater detection in urban areas using Sentinel-1 and WorldDEM data. J. Appl. Remote Sens. 2021, 15, 032003. [Google Scholar] [CrossRef]
- Wessel, B.; Huber, M.; Wohlfart, C.; Marschalk, U.; Kossmann, K.; Roth, A. Accuracy assessment of the global TanDEM-X Digital Elevation Model with GPS data. ISPRS J. Photogramm. Remote Sens. 2018, 139, 171–182. [Google Scholar] [CrossRef]
- Revilla-Romero, B.; Shelton, K.; Wood, E.; Berry, R.; Bevington, J.; Hankin, B.; Lewis, G.; Gubbin, A.; Griffiths, S.; Barnard, P.; et al. Flood Foresight: A near-real time flood monitoring and forecasting tool for rapid and predictive flood impact assessment. Geophys. Res. Abstr. 2017, 19, 1230. [Google Scholar]
- Bradbrook, K. JFLOW: A multiscale two-dimensional dynamic flood model. Water Environ. J. 2006, 20, 79–86. [Google Scholar] [CrossRef]
- Environment Agency. Real-time Flood Impacts Mapping. 2019. Available online: https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/844094/Real-time_flood_impacts_mapping_-_report.pdf (accessed on 1 June 2021).
- Thorne, C. Geographies of UK flooding in 2013/4. Geogr. J. 2014, 180, 297–309. [Google Scholar] [CrossRef]
- Stuart-Menteth, A. UK Summer 2007 Floods, 2007; Risk Management Solutions: Newark, CA, USA, 2007. [Google Scholar]
- Neal, J.C.; Keef, C.; Bates, P.D.; Beven, K.; Leedal, D. Probabilistic flood risk mapping including spatial dependence. Hydrol. Process. 2012, 27, 1349–1363. [Google Scholar] [CrossRef]
- Brisco, B.; Touzi, R.; Van der Sanden, J.J.; Charbonneau, F.; Pultz, T.J.; D’Iorio, M. Water resource applications with RA-DARSAT-2—A preview. Int. J. Digit. Earth 2008, 1, 130–147. [Google Scholar] [CrossRef]
- Marconcini, M.; Metz-Marconcini, A.; Üreyen, S.; Palacios-Lopez, D.; Hanke, W.; Bachofer, F.; Zeidler, J.; Esch, T.; Gorelick, N.; Kakarla, A.; et al. Outlining where humans live, the World Settlement Footprint 2015. Sci. Data 2020, 7, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Definiens, A.G. Definiens Developer 8 User Guide, Document Version 1.2.0; Definiens Documentation: Munich, Germany, 2012. [Google Scholar]
- Aitken, A.C. IV.—On Least Squares and Linear Combination of Observations. Proc. R. Soc. Edinb. 1936, 55, 42–48. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date and Time | River | Location | SAR | Resolution (m) | Pass | Angle of Inclination (°) | Angle of Incidence (°) |
|---|---|---|---|---|---|---|---|
| 12 February 2014 19:05 | Thames | Wraysbury | COSMO- SkyMed | 2.5 | Descending | 97.9 | 43.4 |
| 13 February 2014 18:11 | Thames | Wraysbury Staines | COSMO- SkyMed | 2.5 | Descending | 97.9 | 31.6 |
| 14 February 2014 18:05 | Thames | Wraysbury Staines | COSMO- SkyMed | 2.5 | Descending | 97.9 | 35.9 |
| 25 July 2007 06:34 | Severn/ Avon | Tewkesbury | TerraSAR-X | 3.0 | Descending | 97.4 | 24 |
| Image | Flood Detection Rate (Recall) (%) | Precision (%) | Critical Success Index (CSI) (%) |
|---|---|---|---|
| Wraysbury 12 February 2014 | 91 | 98 | 89 |
| Wraysbury 13 February 2014 | 95 | 96 | 91 |
| Wraysbury 14 February 2014 | 90 | 99 | 89 |
| Blackett 13 February 2014 | 100 | 85 | 85 |
| Blackett 14 February 2014 | 99 | 99 | 99 |
| Tewkesbury 25 July 2007 | 88 | 77 | 70 |
| Image | Flood Detection Rate (Recall) (%) | Precision (%) | Critical Success Index (CSI) (%) |
|---|---|---|---|
| Wraysbury 12 February 2014 | 91 | 98 | 89 |
| Wraysbury 13 February 2014 | 95 | 96 | 91 |
| Wraysbury 14 February 2014 | 89 | 99 | 88 |
| Blackett 13 February 2014 | 100 | 85 | 85 |
| Blackett 14 February 2014 | 99 | 99 | 99 |
| Tewkesbury 25 July 2007 | 88 | 77 | 70 |
| Image + Model Output | Flood Detection Rate (Recall) (%) | Precision (%) | Critical Success Index (CSI) (%) |
|---|---|---|---|
| Blackett 13 February 2014 image + 13 February 2014 18:00 timestep model extent | 100 (93) | 91 (100) | 91 (93) |
| Blackett 14 February 2014 image + 14 February 14 18:00 timestep model extent | 98 (93) | 100 (100) | 98 (93) |
| Tewkesbury 25 July 2007 image + model maximum extent | 74 (38) | 90 (97) | 69 (38) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mason, D.C.; Bevington, J.; Dance, S.L.; Revilla-Romero, B.; Smith, R.; Vetra-Carvalho, S.; Cloke, H.L. Improving Urban Flood Mapping by Merging Synthetic Aperture Radar-Derived Flood Footprints with Flood Hazard Maps. Water 2021, 13, 1577. https://0-doi-org.brum.beds.ac.uk/10.3390/w13111577
Mason DC, Bevington J, Dance SL, Revilla-Romero B, Smith R, Vetra-Carvalho S, Cloke HL. Improving Urban Flood Mapping by Merging Synthetic Aperture Radar-Derived Flood Footprints with Flood Hazard Maps. Water. 2021; 13(11):1577. https://0-doi-org.brum.beds.ac.uk/10.3390/w13111577
Chicago/Turabian StyleMason, David C., John Bevington, Sarah L. Dance, Beatriz Revilla-Romero, Richard Smith, Sanita Vetra-Carvalho, and Hannah L. Cloke. 2021. "Improving Urban Flood Mapping by Merging Synthetic Aperture Radar-Derived Flood Footprints with Flood Hazard Maps" Water 13, no. 11: 1577. https://0-doi-org.brum.beds.ac.uk/10.3390/w13111577