
Laboratory Investigations of the Bending Rheology of Floating Saline Ice and Physical Mechanisms of Wave Damping in the HSVA Hamburg Ship Model Basin Ice Tank

 , ,
, ,
Abstract
:1. Introduction
2. Organizing of Experiments
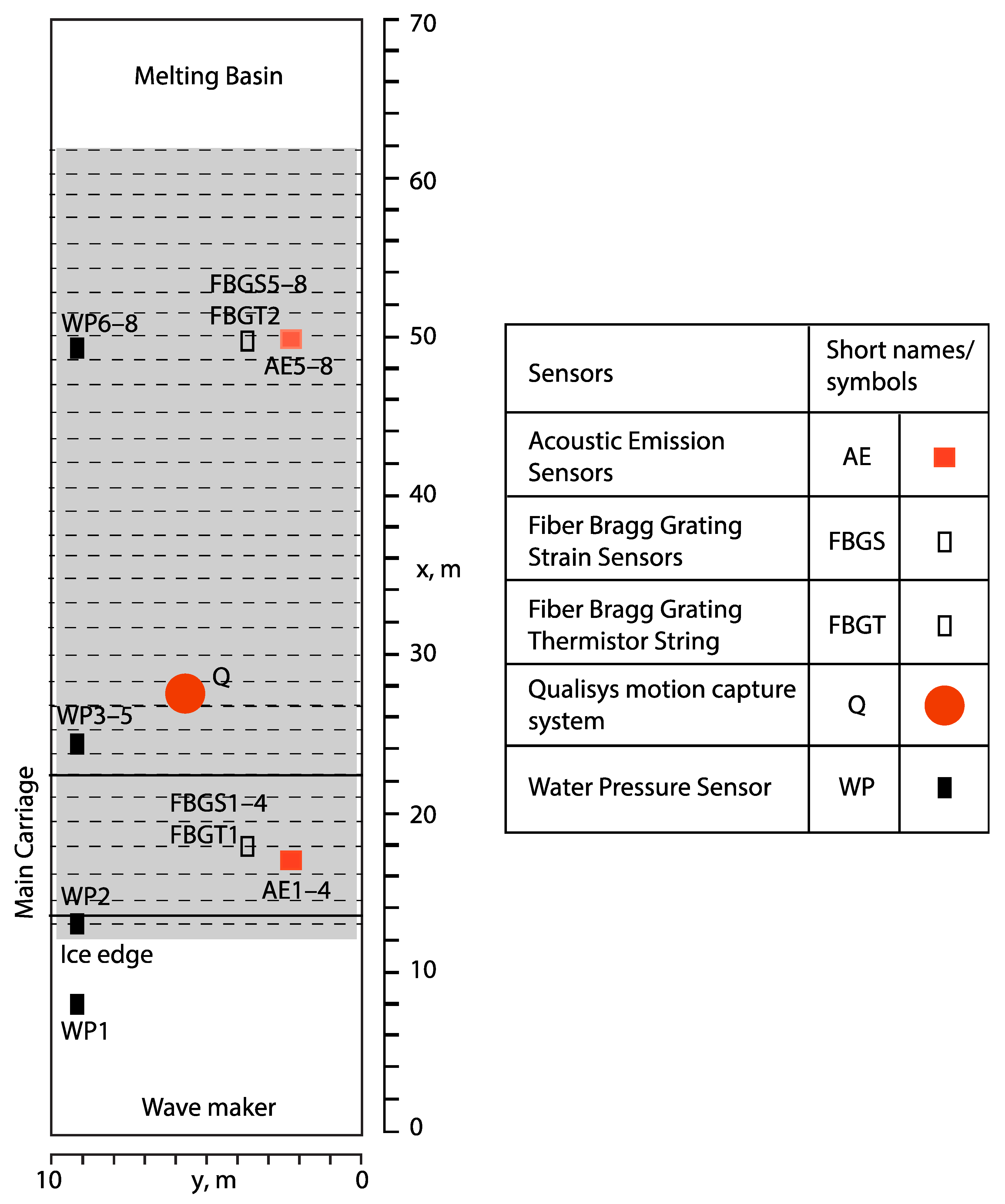
3. Measurement Equipment
3.1. Fiber Bragg Grating Sensors
3.2. Qualisys–Motion Capture System
3.3. Water Pressure Sensors
3.4. Acoustic Emission Sensors
4. Results of Experiments with Fixed Ice
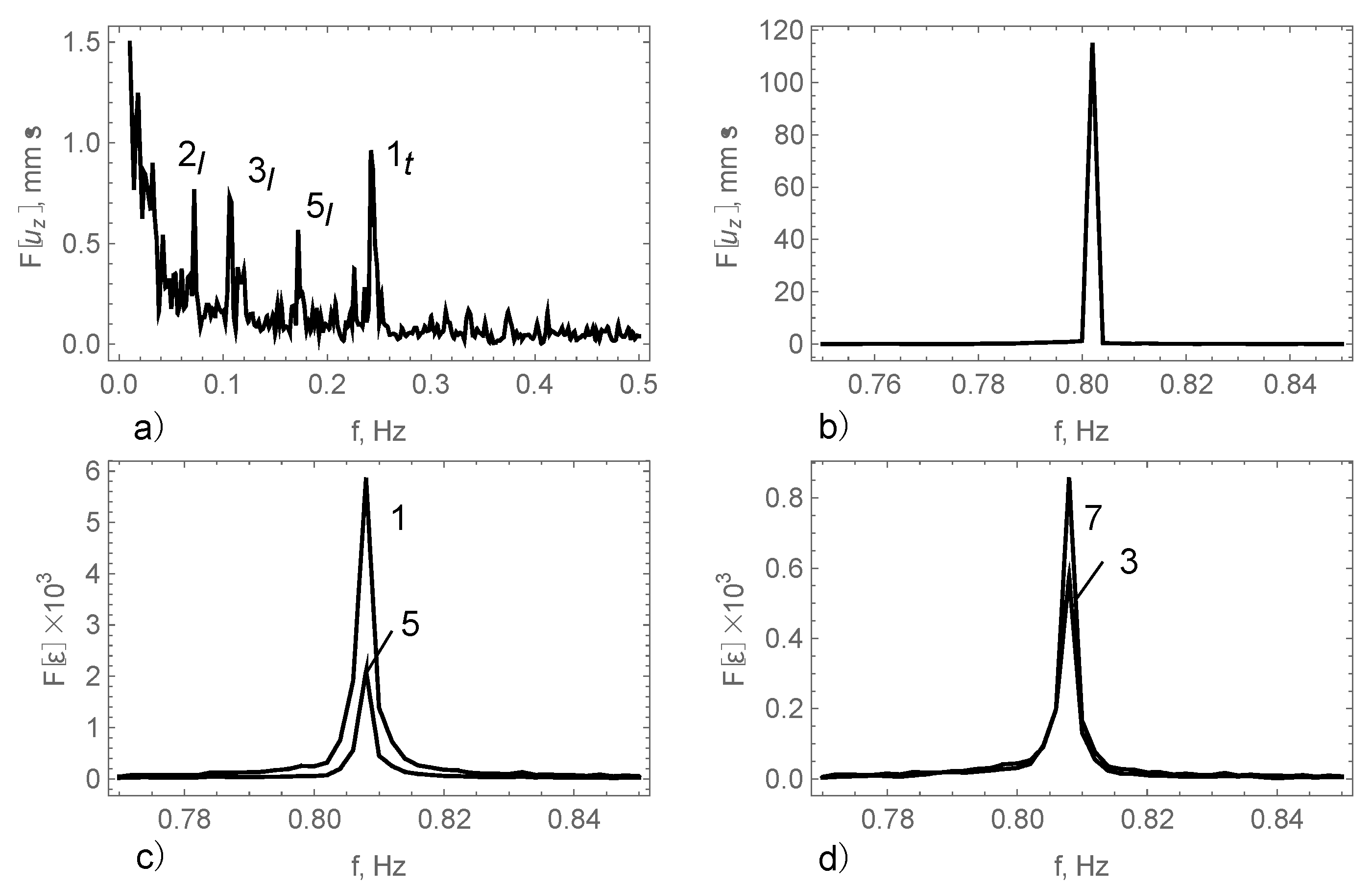
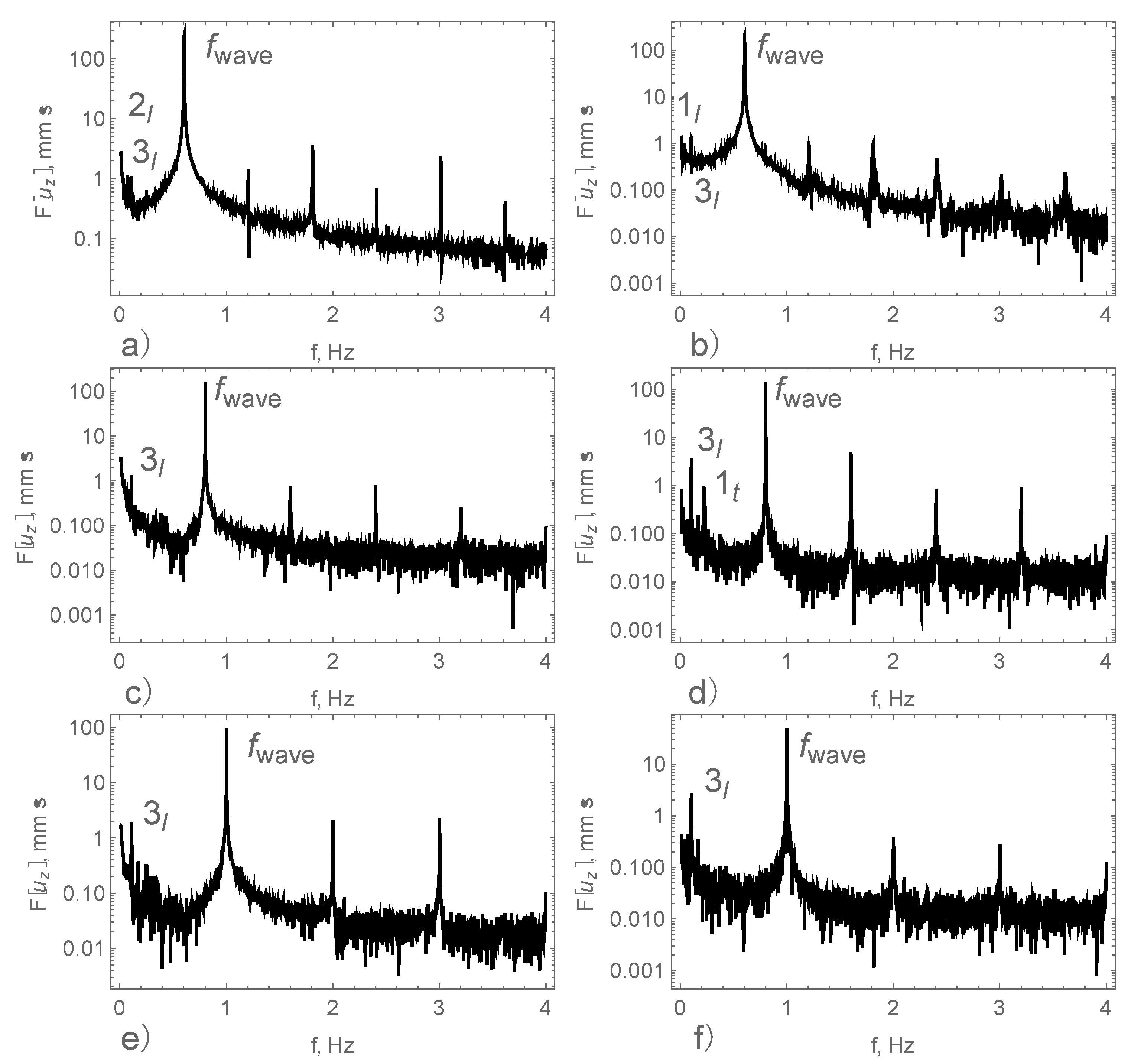
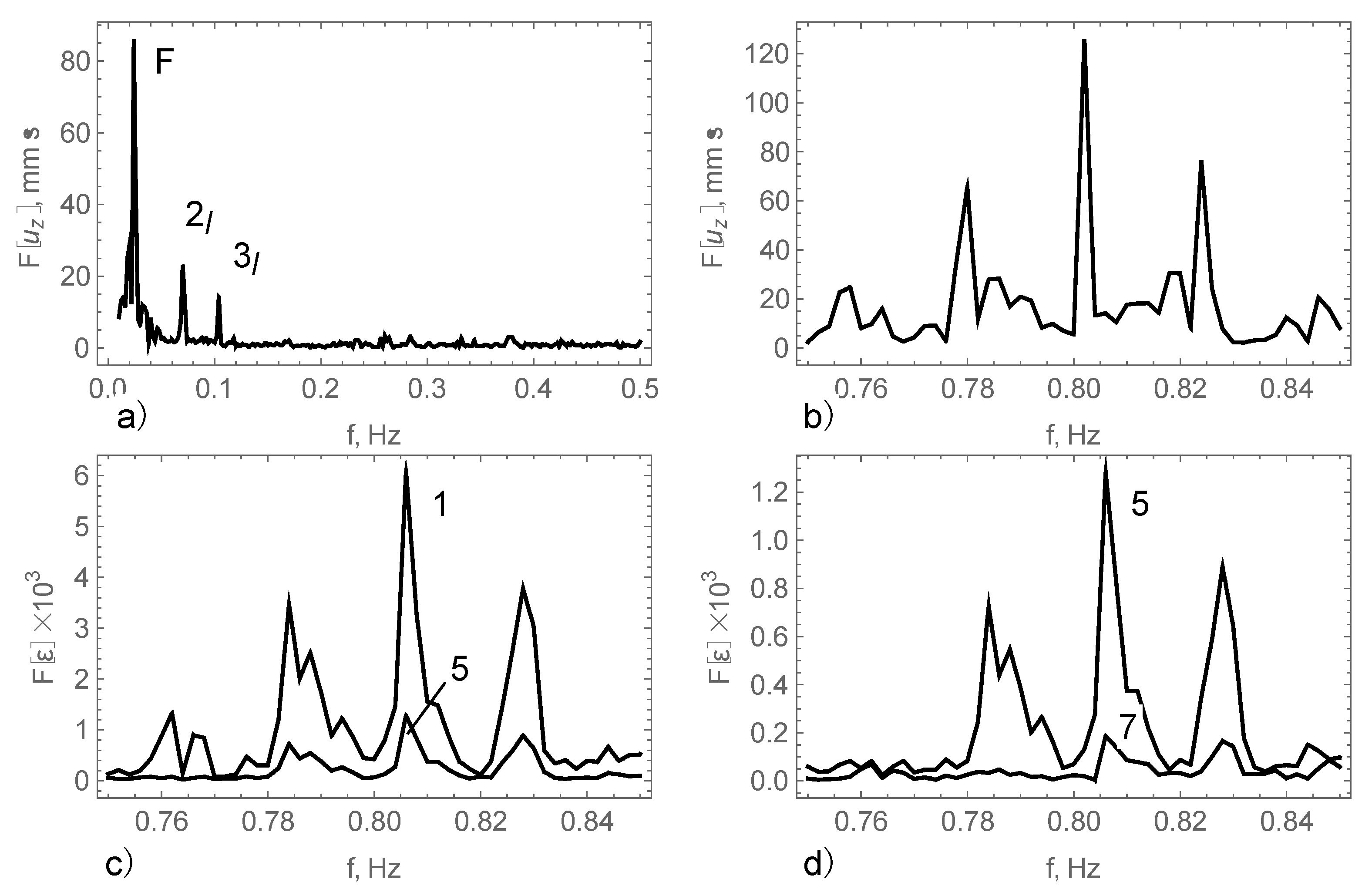
4.1. Spectral Composition of Waves in the Tank
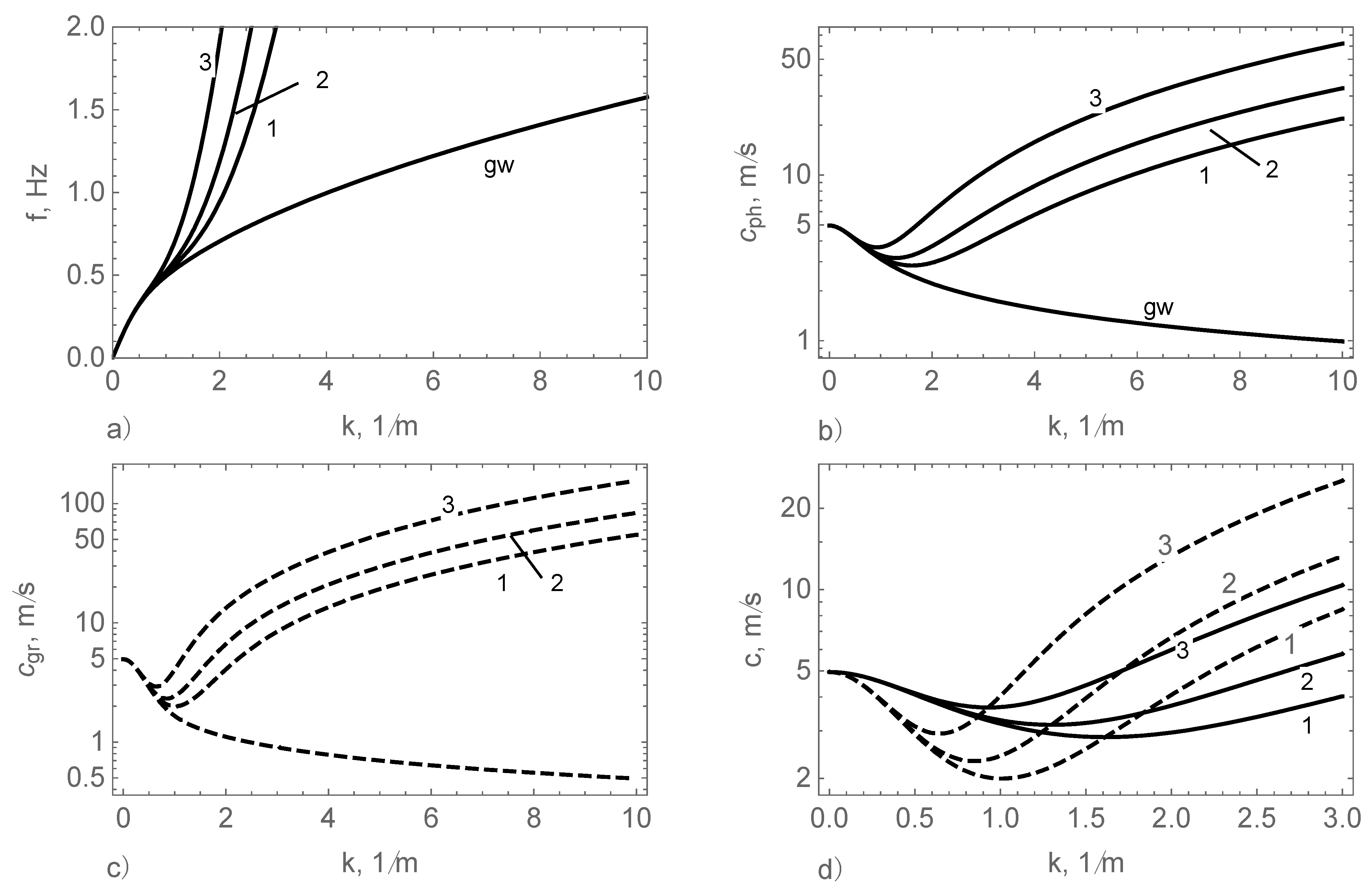
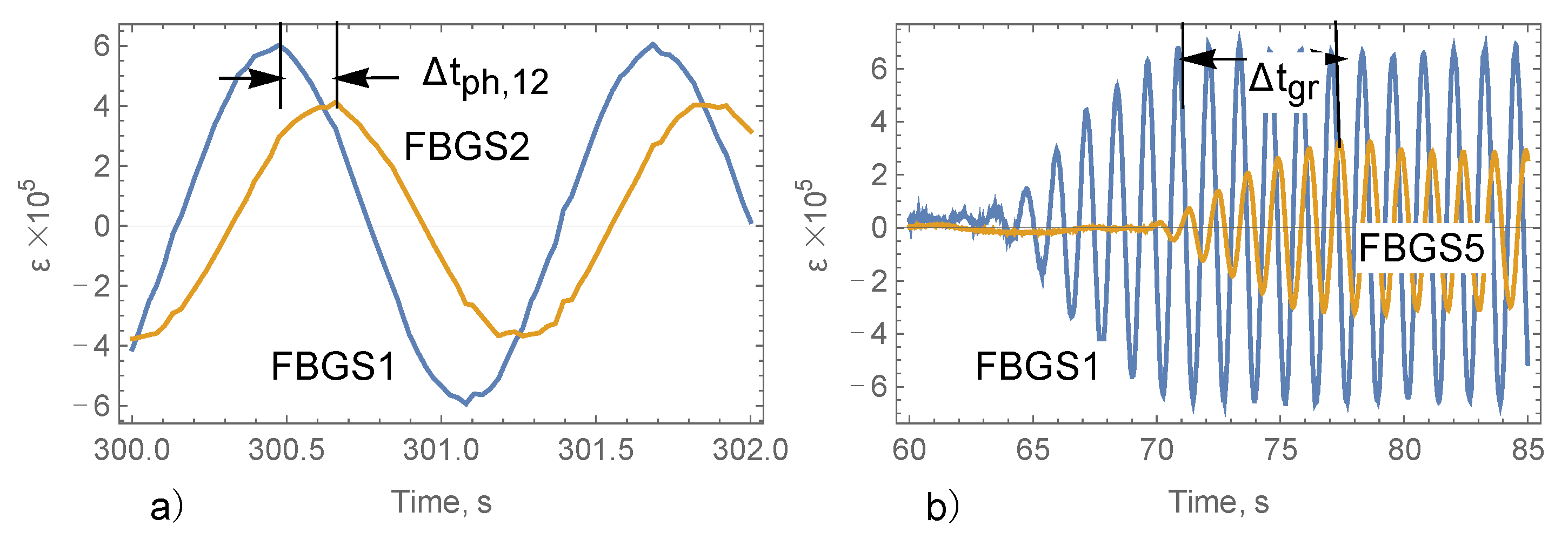
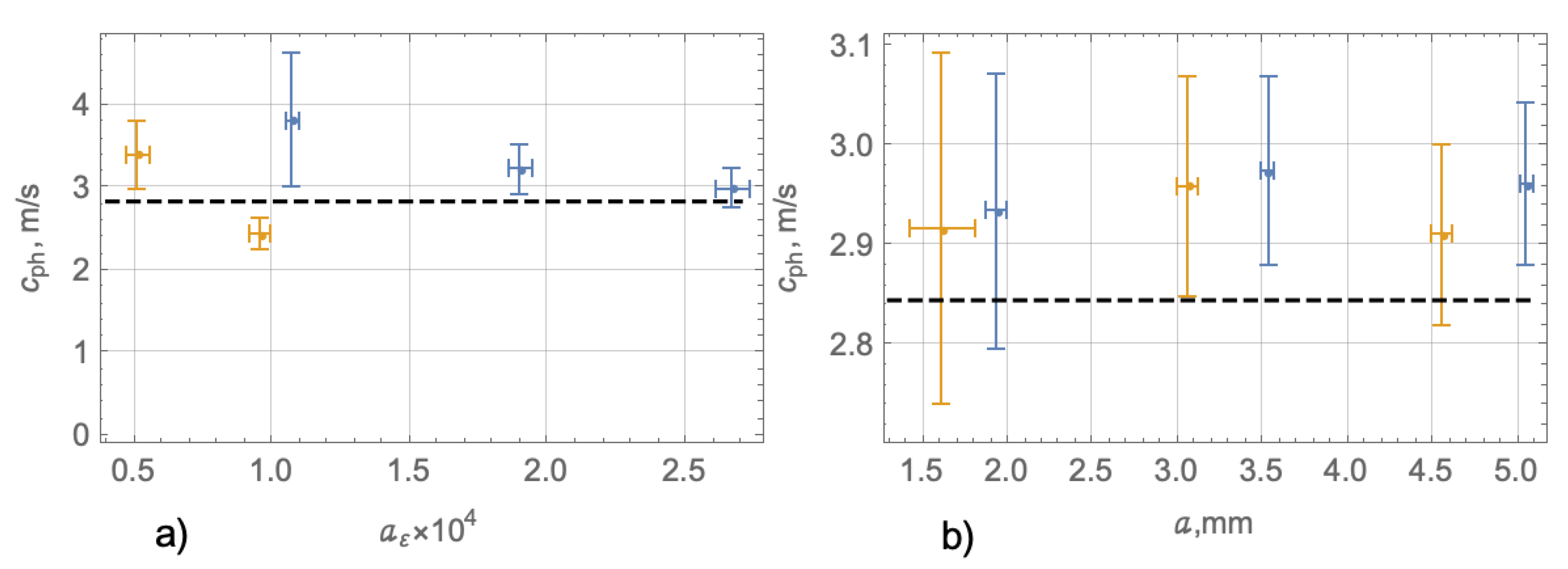
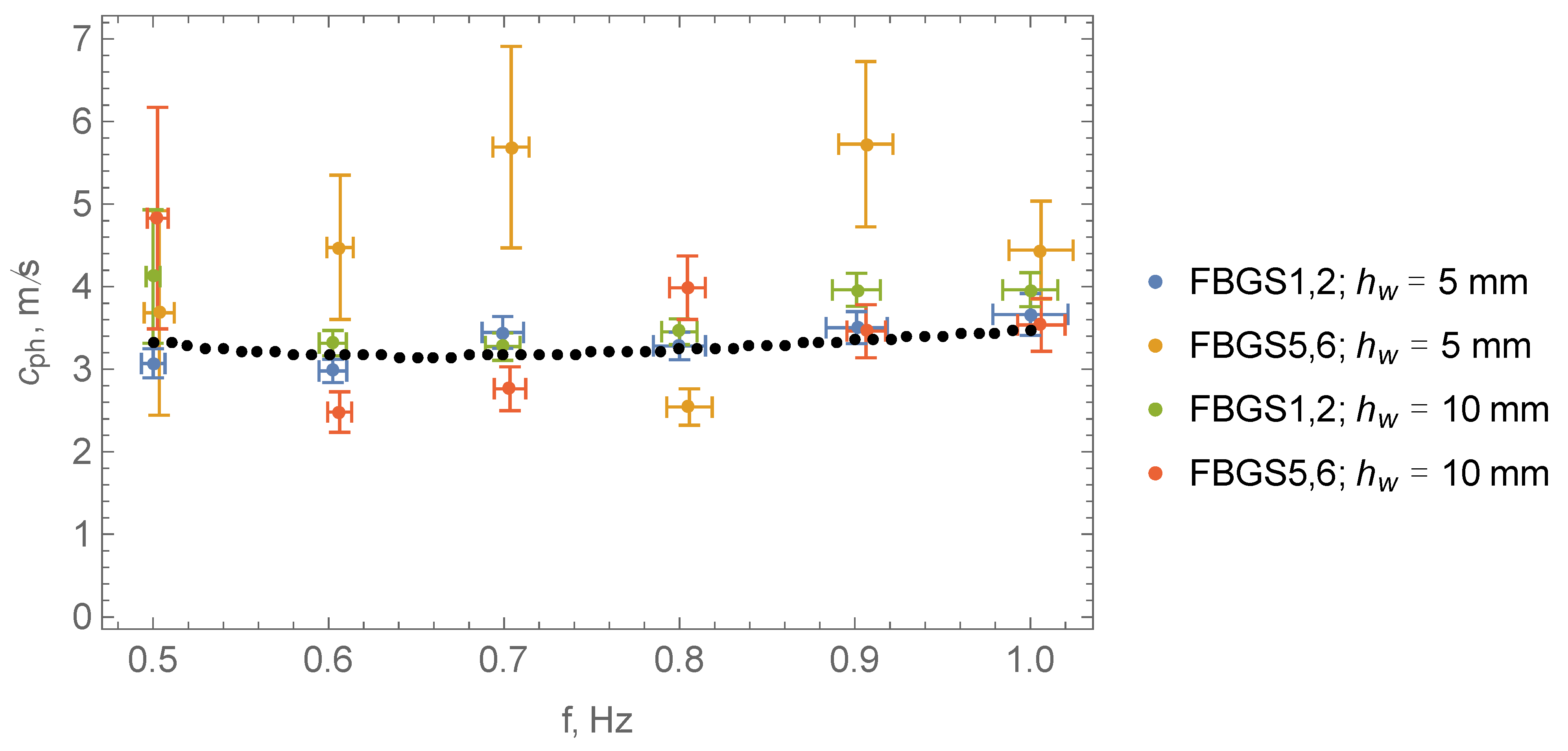
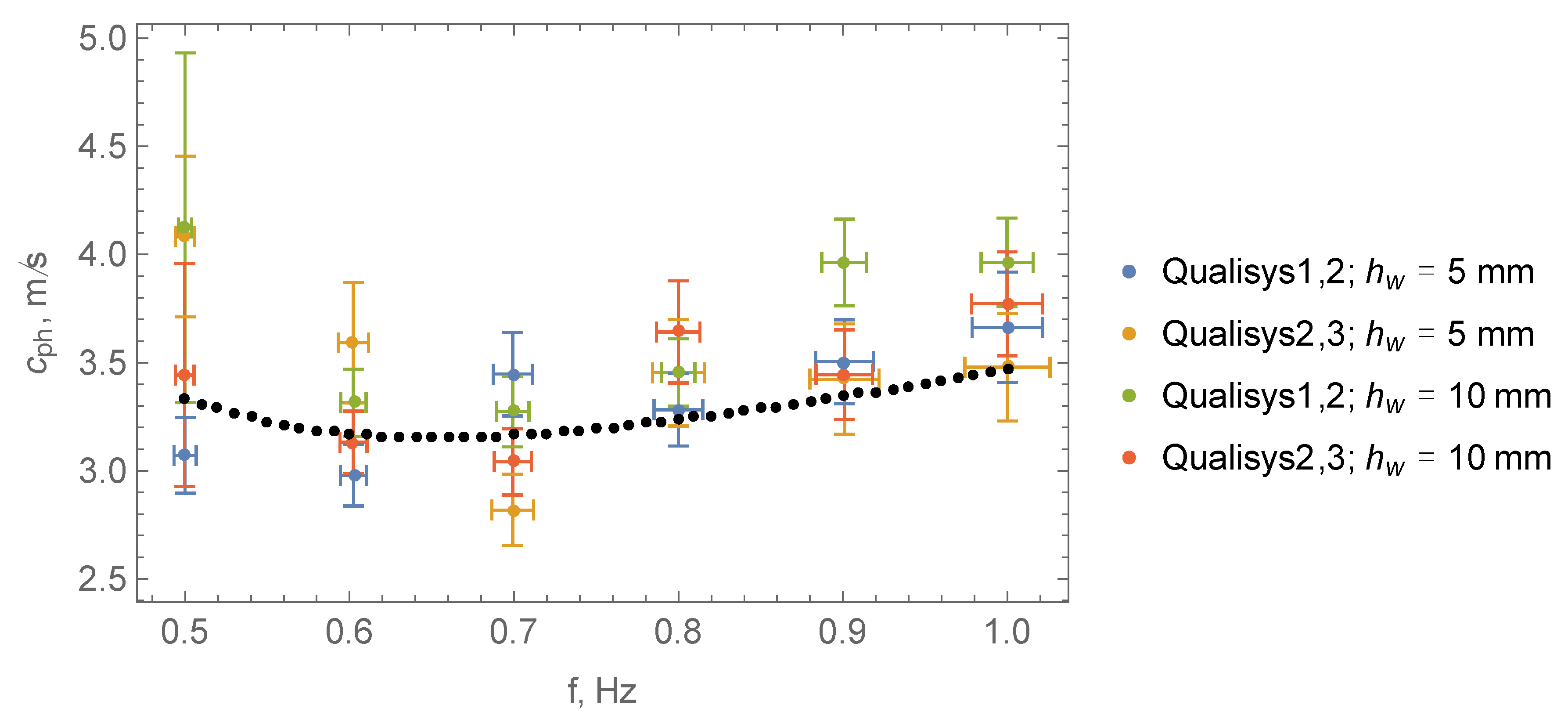
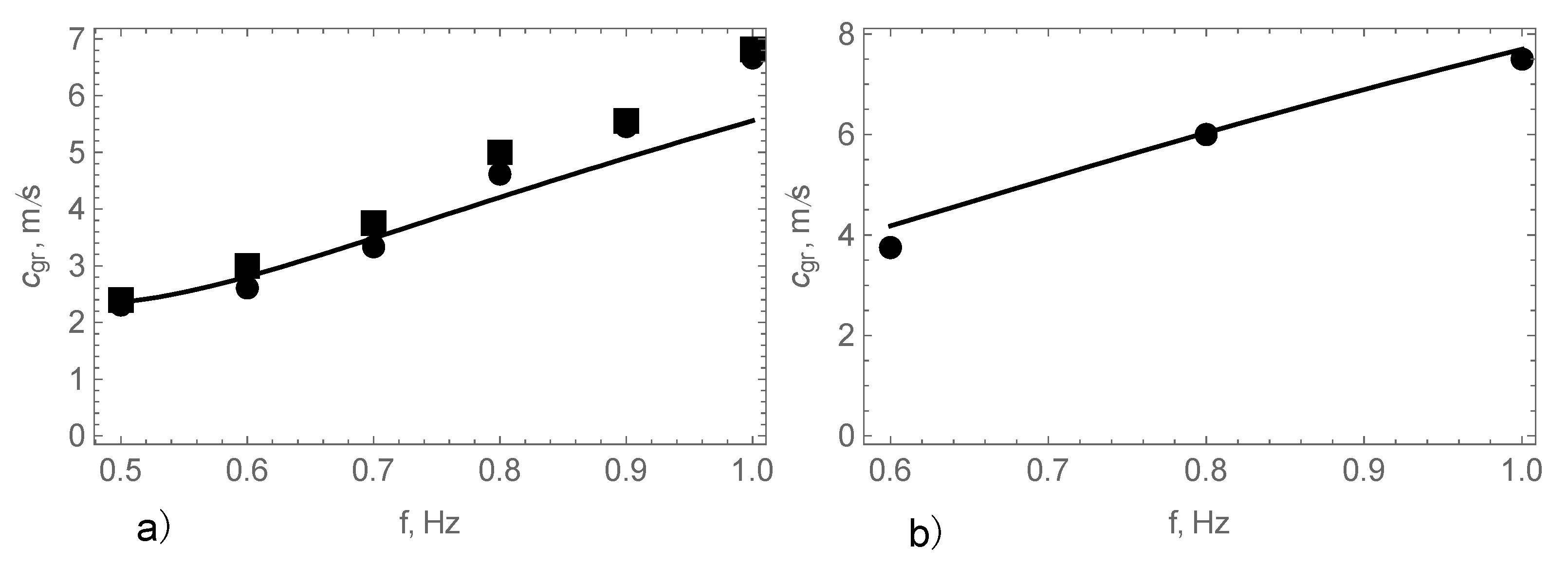
4.2. Phase and Group Velocities
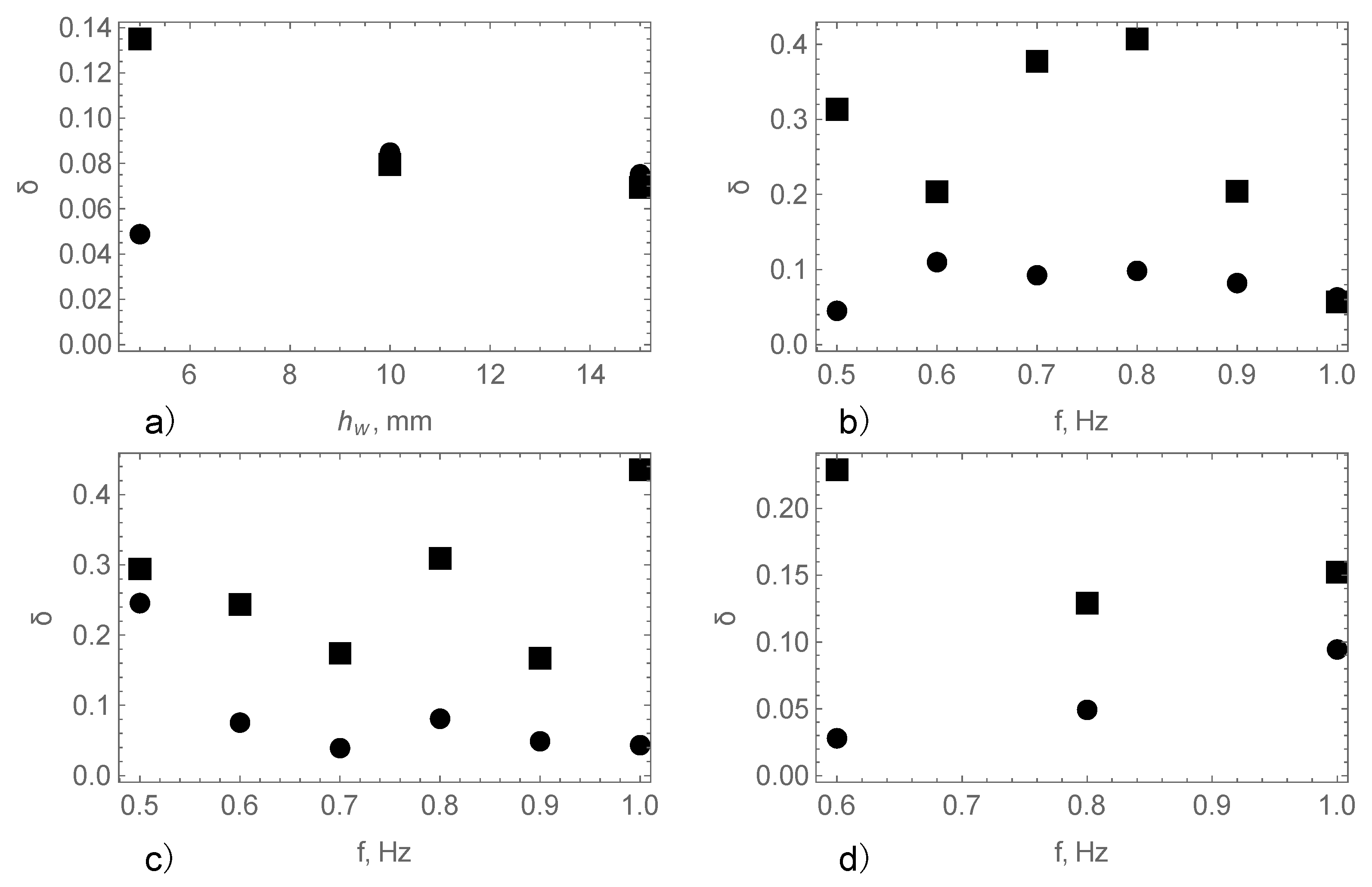
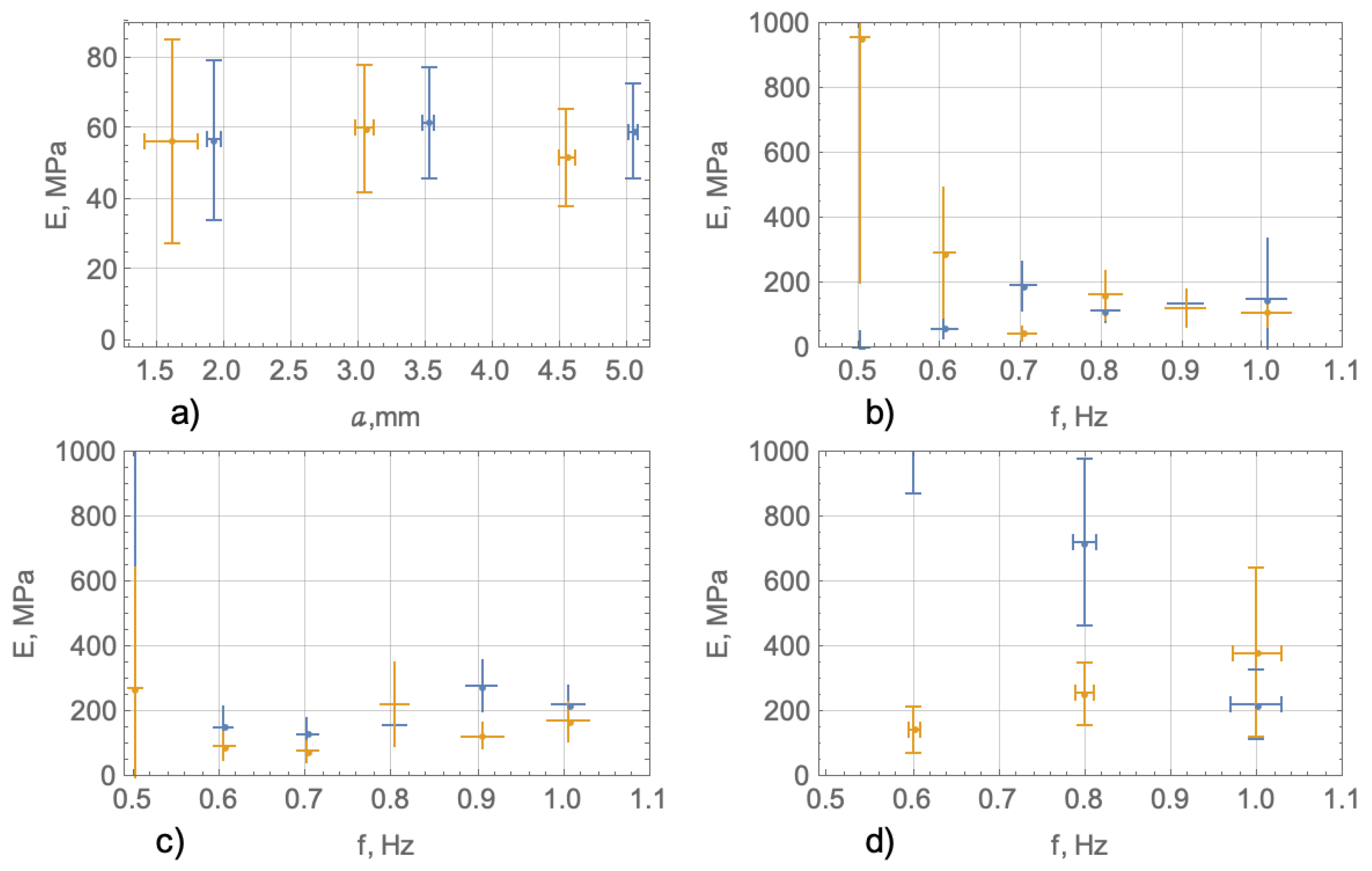
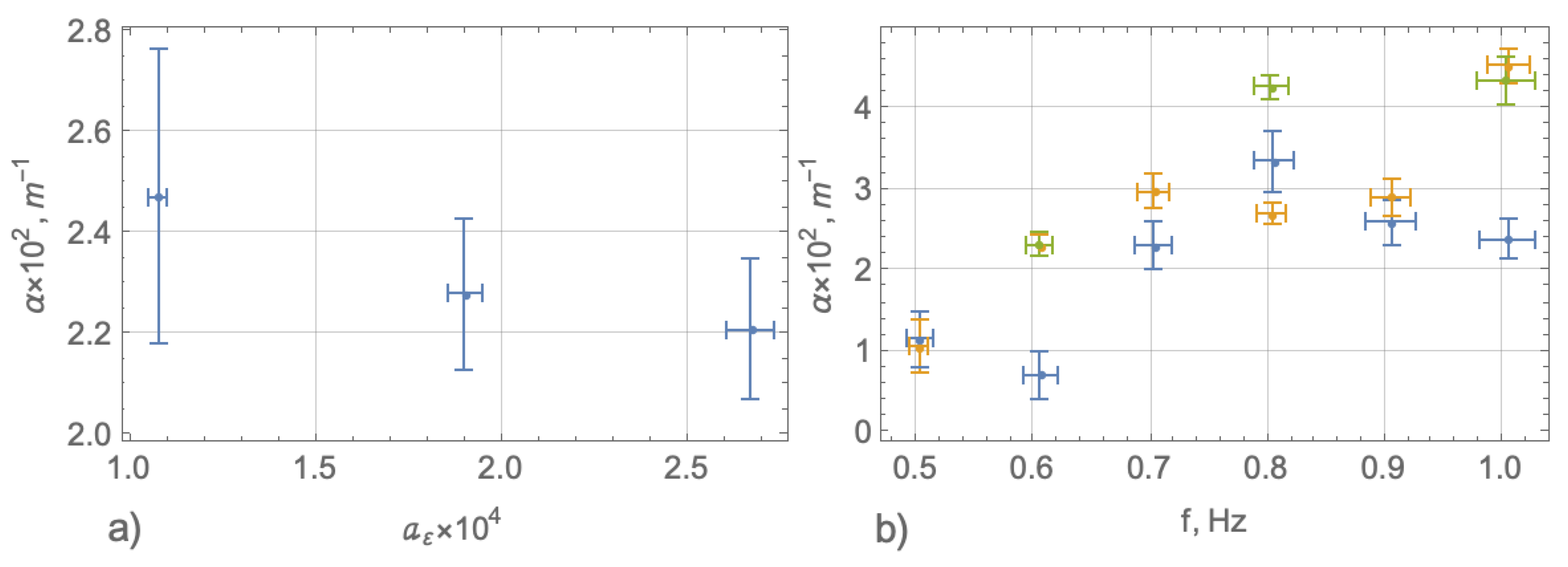
4.3. Elastic Moduli and Coefficients of Viscosity
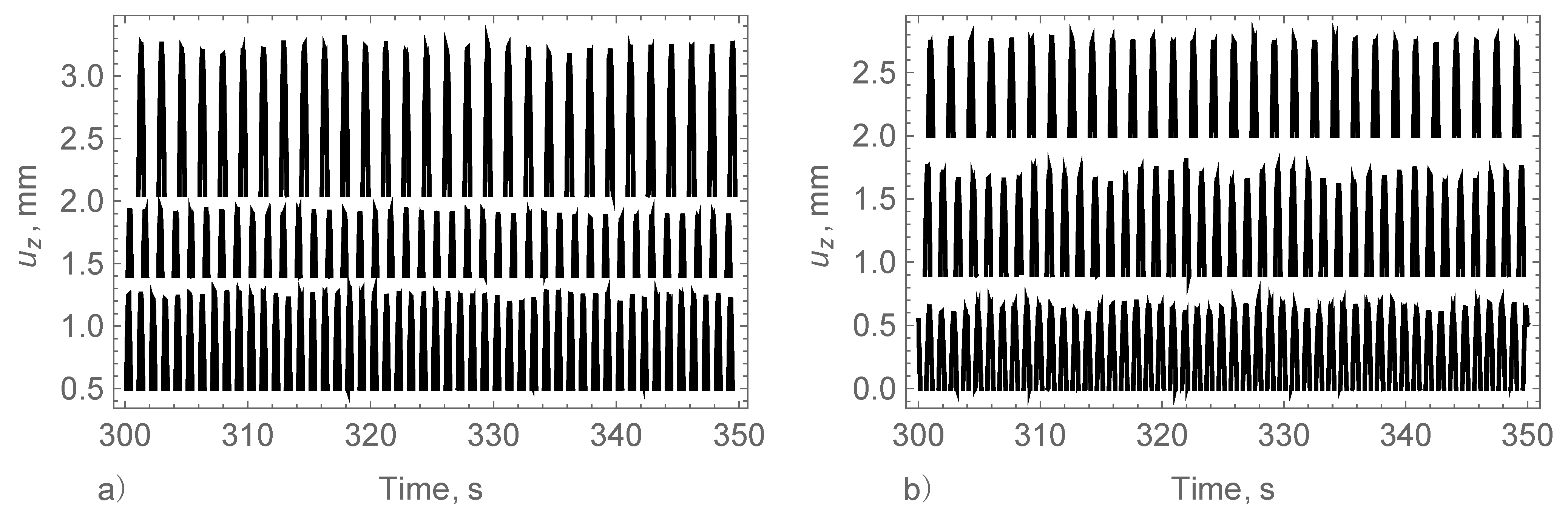
5. Results of Experiments with Moving Ice
6. Measurements of Acoustic Emission
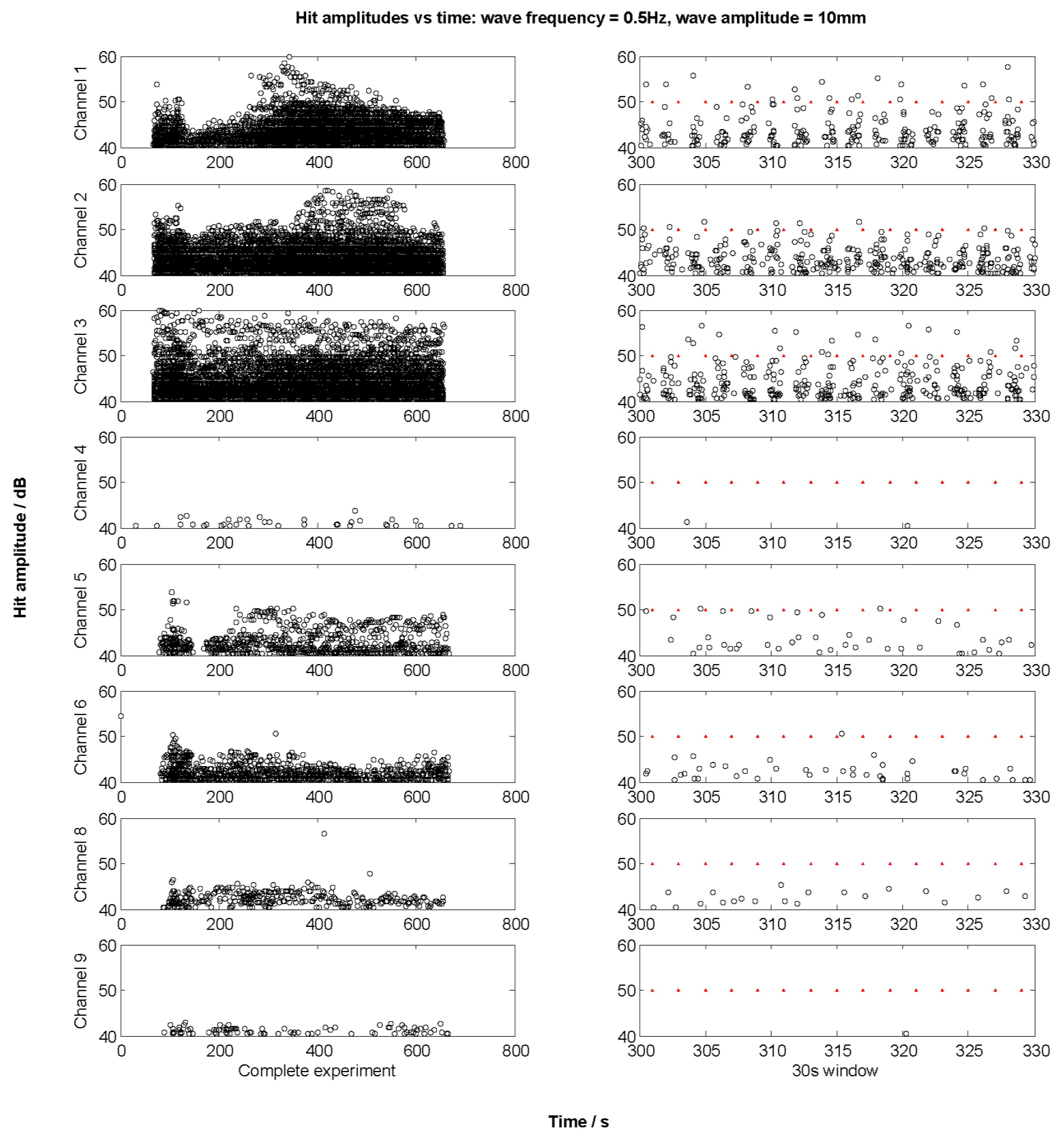
- The stronger signal in channels 1–3 is because the wave amplitude, and hence the ice deformation, is higher here. Correspondingly, the amplitudes and numbers of hits recorded on channels 5, 6, 8 and 9 are lower since the waves are significantly damped at this end of the tank.
- Channels 1–3 show a signal which is periodic with the same frequency as the wavemaker. This periodicity is less clear in the signals from the far end of the tank, although further analysis across our recorded data may detect periodicity in the signals recorded by these transducers.
- On each channel there is a strong signal after the wavemaker starts, which decays after the first ~30 s. This suggests that there is more acoustic activity when the ice starts to deform, and that this activity decreases with continued deformation caused by wave actions.
- There is notable variation within channels over the duration of the experiment: for example, on channel 1, after an initial period of relatively intense AE (~60–120 s), there is a period of less intense emissions, and AE activity then rises again and reaches a peak between 300 and 400 s. Patterns on other channels are qualitatively similar but quantitatively different, suggesting that periods of intense AE may represent local cracking close to individual transducers.
7. Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Sepp, M.; Jaagus, J. Changes in the activity and tracks of Arctic cyclones. Clim. Chang. 2010, 105, 577–595. [Google Scholar] [CrossRef]
- Wadhams, P. Ice in the Ocean; OPA, Gordon and Breach Science: Amsterdam, The Netherlands, 2000. [Google Scholar]
- Collins, C.O.; Rogers, W.E.; Marchenko, A.; Babanin, A.V. In situ measurements of an energetic wave event in the Arctic marginal ice zone. Geophys. Res. Lett. 2015, 42, 1863–1870. [Google Scholar] [CrossRef]
- Doble, M.J.; Wadhams, P. Dynamical contrasts between pancake and pack ice, investigated with a drifting buoy array. J. Geophys. Res. Space Phys. 2006, 111, C11S24. [Google Scholar] [CrossRef] [Green Version]
- Hayes, D.R.; Jenkins, A.; McPhail, S. Autonomous Underwater Vehicle Measurements of Surface Wave Decay and Directional Spectra in the Marginal Sea Ice Zone. J. Phys. Oceanogr. 2007, 37, 71–83. [Google Scholar] [CrossRef]
- Kohout, A.L.; Penrose, B.; Penrose, S.; Williams, M.J. A device for measuring wave-induced motion of ice floes in the Antarctic marginal ice zone. Ann. Glaciol. 2015, 56, 415–424. [Google Scholar] [CrossRef] [Green Version]
- LeSchack, L.A.; Haubrich, R.A. Observations of waves on an ice-covered ocean. J. Geophys. Res. Space Phys. 1964, 69, 3815–3821. [Google Scholar] [CrossRef]
- Marchenko, A.; Wadhams, P.; Collins, C.; Rabault, J.; Chumakov, M. Wave-ice interaction in the North-West Barents Sea. Appl. Ocean Res. 2019, 90, 101861. [Google Scholar] [CrossRef] [Green Version]
- Martin, S.; Becker, P. High-frequency ice floe collisions in the Greenland Sea During the 1984 Marginal Ice Zone Experiment. J. Geophys. Res. Space Phys. 1987, 92, 7071. [Google Scholar] [CrossRef]
- Robin, G.D.Q. Wave propagation through fields of pack ice, Philosophical Transactions of the Royal Society of London. Ser. A Math. Phys. Sci. 1963, 255, 313–339. [Google Scholar]
- Smirnov, V.N. Dynamics Processes in Sea Ice; Gidrometeoizdat: St. Petersburg, Russia, 1996. [Google Scholar]
- Tsarau, A.; Shestov, A.; Løset, S. Wave Attenuation in the Barents Sea Marginal Ice Zone in the Spring of 2016. In Proceedings of the International Conference on Port and Ocean Engineering Under Arctic Conditions (POAC), Busan, Korea, 11–16 June 2017. [Google Scholar]
- Wadhams, P.; Squire, V.A.; Ewing, J.; Pascal, R. The effect of the marginal ice zone on the directional wave spectrum of the ocean. J. Phys. Oceanogr. 1986, 16, 358–376. [Google Scholar] [CrossRef] [Green Version]
- Wadhams, P.; Squire, V.A.; Goodman, D.J.; Cowan, A.M.; Moore, S.C. The attenuation rates of ocean waves in the marginal ice zone. J. Geophys. Res. Space Phys. 1988, 93, 6799–6818. [Google Scholar] [CrossRef]
- Squire, V.A.; Dugan, J.P.; Wadhams, P.; Rottier, P.J.; Liu, A.K. Of ocean waves and sea ice. Annu. Rev. Fluid Mech. 1995, 27, 115–168. [Google Scholar] [CrossRef]
- Shen, H.H.; Squire, V.A. Wave damping in compact pancake ice fields due to interactions between pancakes. Antarct. Sea Ice Phys. Process. Interact. Var. 1998, 741998, 325–341. [Google Scholar]
- Frankenstein, S.; Lóset, S.; Shen, H.H. Wave-Ice Interactions in Barents Sea Marginal Ice Zone. J. Cold Reg. Eng. 2001, 15, 91–102. [Google Scholar] [CrossRef]
- Herman, A. Wave-Induced Surge Motion and Collisions of Sea Ice Floes: Finite-Floe-Size Effects. J. Geophys. Res. Ocean. 2018, 123, 7472–7494. [Google Scholar] [CrossRef]
- Li, H.; Lubbad, R. Laboratory study of ice floes collisions under wave action. In Proceedings of the International Offshore and Polar Engineering Conference (ISOPE), Sapporo, Japan, 10–15 June 2018. [Google Scholar]
- Weber, J.E. Wave Attenuation and Wave Drift in the Marginal Ice Zone. J. Phys. Oceanogr. 1987, 17, 2351–2361. [Google Scholar] [CrossRef] [Green Version]
- Lamb, H. Hydrodynamics, 6th ed.; Cambridge University Press: Cambridge, UK, 1932. [Google Scholar]
- Liu, A.K.; Mollo-Christensen, E. Wave Propagation in a Solid Ice Pack. J. Phys. Oceanogr. 1988, 18, 1702–1712. [Google Scholar] [CrossRef]
- Kohout, A.L.; Meylan, M.H.; Plew, D.R. Wave attenuation in a marginal ice zone due to the bottom roughness of ice floes. Ann. Glaciol. 2011, 52, 118–122. [Google Scholar] [CrossRef] [Green Version]
- Langleben, M.P. Water drag coefficient of first-year sea ice. J. Geophys. Res. Space Phys. 1982, 87, 573. [Google Scholar] [CrossRef]
- Marchenko, A.V.; Gorbatsky, V.V.; Turnbull, I.D. Characteristics of under-ice ocean currents measured during wave propagation events in the Barents Sea. In Proceedings of the International Conference on Port and Ocean Engineering under Arctic Conditions (POAC), Trondheim, Norway, 14–18 June 2015. [Google Scholar]
- Voermans, J.J.; Babanin, A.V.; Thomson, J.; Smith, M.M.; Shen, H.H. Wave Attenuation by Sea Ice Turbulence. Geophys. Res. Lett. 2019, 46, 6796–6803. [Google Scholar] [CrossRef]
- Crary, A.P.; Cotell, R.D.; Oliver, J. Geophysical studies in the Beaufort Sea, 1951. Trans. Am. Geophys. Union 1952, 33, 211–216. [Google Scholar] [CrossRef]
- Hunkins, K. Waves on the Arctic Ocean. J. Geophys. Res. Space Phys. 1962, 67, 2477–2489. [Google Scholar] [CrossRef]
- Sytinskii, A.D.; Tripol’nikov, V.P. Some investigation results of natural oscillations of ice fields in Central Arctic. Izv. Sssr. Geofiz. 1964, 4, 210–212. [Google Scholar]
- Gudkovich, Z.M.; Sytinskii, A.D. Some observation results of tidal phenomena in Arctic basin using tilt-meters. Okeanologia 1965, 5, 75–85. [Google Scholar]
- Schulson, E.M.; Duval, P. Creep and Fracture of Ice; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Wadhams, P. Attenuation of swell by sea ice. J. Geophys. Res. Space Phys. 1973, 78, 3552–3563. [Google Scholar] [CrossRef]
- Glen, J.W. The creep of polycrystalline ice. Proc. R. Soc. Lond. A 1955, 228, 519–538. [Google Scholar]
- Squire, V.A.; Allan, A. Propagation of Flexural Gravity Waves in Sea Ice. In Sea Ice Processes and Models: Proceedings of the Arctic Ice Dynamics Joint Experiment International Commission of Snow and Ice Symposium; Pritchard, R.S., Ed.; University of Washington Press: Seattle, WA, USA, 1980; pp. 327–338. [Google Scholar]
- Tabata, T. Studies on visco-elastic properties of sea ice in Arctic Sea Ice. In Proceedings of the Arctic Sea Ice Conference, Easton, MD, USA, 25–27 February 1958. [Google Scholar]
- Cole, D.M. A model for the anelastic straining of saline ice subjected to cyclic loading. Philos. Mag. A 1995, 72, 231–248. [Google Scholar] [CrossRef]
- MacAyeal, D.R.; Sergienko, O.V.; Banwell, A.F. A model of viscoelastic ice-shelf flexure. J. Glaciol. 2015, 61, 635–645. [Google Scholar] [CrossRef] [Green Version]
- Walker, R.T.; Parizek, B.R.; Alley, R.B.; Anandakrishnan, S.; Riverman, K.L.; Christianson, K. Ice-shelf tidal flexure and subglacial pressure variations. Earth Planet. Sci. Lett. 2013, 361, 422–428. [Google Scholar] [CrossRef] [Green Version]
- Timco, G.; Weeks, W. A review of the engineering properties of sea ice. Cold Reg. Sci. Technol. 2010, 60, 107–129. [Google Scholar] [CrossRef]
- International Standard Organization. ISO 19906, Petroleum and Natural Gas Industries—Arctic Offshore Structures; International Standard Organization: Geneva, Switzerland, 2019. [Google Scholar]
- Murat, J.; Lainey, L. Some experimental observations on the Poisson’s ratio of sea-ice. Cold Reg. Sci. Technol. 1982, 6, 105–113. [Google Scholar] [CrossRef]
- Sinha, N.K. Short-term rheology of polycrystalline ice. J. Glaciol. 1978, 21, 457–474. [Google Scholar] [CrossRef] [Green Version]
- Langleben, M.P.; Pounder, E.R. Elastic parameters of sea ice. In Ice and Snow; Kingery, W.D., Ed.; M.I.T. Press: Cambridge, MA, USA, 1963; pp. 69–78. [Google Scholar]
- Kohnen, H. Seismic and ultrasonic mesasurements on the sea ice of Eclipse Sound near Pond Inlet, NWT, on northern Baffin Island. Polarforschung 1972, 42, 66–74. [Google Scholar]
- Marchenko, A.; Grue, J.; Karulin, E.; Frederking, R.; Lishman, B.; Chistyakov, P.; Karulina, M.; Sodhi, D.; Renshaw, C.; Sakharov, A. Elastic moduli of sea ice and lake ice calculated from in-situ and laboratory experiments. In Proceedings of the 25th IAHR International Symposium on Ice, The International Association for Hydro-Environment Engineering and Research, Trondheim, Norway, 23–25 November 2020. [Google Scholar]
- Vaudrey, K. Ice Engineering: Study of Related Properties of Floating Sea-Ice Sheets and Summary of Elastic and Viscoelastic Analyses; Technical Report; Naval Civil Engineering Laboratory: Port Hueneme, CA, USA, 1977. [Google Scholar]
- Karulina, M.; Marchenko, A.; Karulin, E.; Sodhi, D.; Sakharov, A.; Chistyakov, P. Full-scale flexural strength of sea ice and freshwater ice in Spitsbergen Fjords and North-West Barents Sea. Appl. Ocean Res. 2019, 90, 101853. [Google Scholar] [CrossRef]
- Lindgren, S. Effect of Temperature Increase of Ice Pressure; Royal Institute of Technology: Stockholm, Sweden, 1986. [Google Scholar]
- Cole, D.M.; Durell, G.D. A dislocation-based analysis of strain history effects in ice. Philos. Mag. A 2001, 81, 1849–1872. [Google Scholar] [CrossRef]
- Marchenko, A.; Cole, D. Three physical mechanisms of wave energy dissipation in solid ice. In Proceedings of the International Conference on Port and Ocean Engineering under Arctic Conditions (POAC), Busan, Korea, 11–16 June 2017. [Google Scholar]
- Fox, C.; Haskell, T.G. Ocean wave speed in the Antarctic marginal ice zone. Ann. Glaciol. 2001, 33, 350–354. [Google Scholar] [CrossRef] [Green Version]
- Marchenko, A.; Morozov, E.; Muzylev, S. Measurements of sea-ice flexural stiffness by pressure characteristics of flexural-gravity waves. Ann. Glaciol. 2013, 54, 51–60. [Google Scholar] [CrossRef] [Green Version]
- Sutherland, G.J.; Rabault, J. Observations of wave dispersion and attenuation in landfast ice. J. Geophys. Res. Ocean. 2016, 121, 1984–1997. [Google Scholar] [CrossRef] [Green Version]
- Cheng, S.; Rogers, W.E.; Thomson, J.; Smith, M.; Doble, M.J.; Wadhams, P.; Kohout, A.L.; Lund, B.; Persson, O.P.; Collins, C.O.; et al. Calibrating a Viscoelastic Sea Ice Model for Wave Propagation in the Arctic Fall Marginal Ice Zone. J. Geophys. Res. Ocean. 2017, 122, 8770–8793. [Google Scholar] [CrossRef]
- Yu, J.; Rogers, W.E.; Wang, D.W. A Scaling for Wave Dispersion Relationships in Ice-Covered Waters. J. Geophys. Res. Ocean. 2019, 124, 8429–8438. [Google Scholar] [CrossRef]
- Ashton, G.D. River and Lake Ice Engineering; Water Resources Publications: Littleton, CO, USA, 1986. [Google Scholar]
- Evers, K.U. Model Tests with Ships and Offshore Structures in HSVA’s Ice Tanks. In Proceedings of the International Conference on Port and Ocean Engineering under Arctic Conditions (POAC), Busan, Korea, 11–16 June 2017. [Google Scholar]
- Kohout, A.; Meylan, M.; Sakai, S.; Hanai, K.; Leman, P.; Brossard, D. Linear water wave propagation through multiple floating elastic plates of variable properties. J. Fluids Struct. 2007, 23, 649–663. [Google Scholar] [CrossRef]
- Ofuya, A.O.; Reynolds, A.J. Laboratory simulation of waves in an ice floe. J. Geophys. Res. Space Phys. 1967, 72, 3567–3583. [Google Scholar] [CrossRef] [Green Version]
- Prabowo, F.; Sree, D.; Wing-Keung, A.L.; Shen, H.H. A laboratory study of wave-ice interaction in the marginal ice zone using polydimedhylsiloxane (PDMS) as viscoelastic model. In Proceedings of the 22nd IAHR International Symposium on Ice, Singapore, 11–15 August 2014. [Google Scholar]
- Sakai, S.; Hanai, K. Empirical formula of dispersion relation of waves in sea ice, Ice in the environment. In Proceedings of the 16th IAHR International Symposium on Ice, Dunedin, New Zealand, 2–6 December 2002; pp. 327–335. [Google Scholar]
- Evers, K.U.; Reimer, N. Wave propagation in ice—A laboratory study. In Proceedings of the International Conference on Port and Ocean Engineering Under Arctic Conditions (POAC), Trondheim, Norway, 14–18 June 2015. [Google Scholar]
- Squire, V.A. A theoretical, laboratory, and field study of ice-coupled waves. J. Geophys. Res. Space Phys. 1984, 89, 8069. [Google Scholar] [CrossRef]
- Rabault, J.; Sutherland, G.; Jensen, A.; Christensen, K.H.; Marchenko, A. Experiments on wave propagation in grease ice: Combined wave gauges and particle image velocimetry measurements. J. Fluid Mech. 2019, 864, 876–898. [Google Scholar] [CrossRef] [Green Version]
- Cheng, S.; Tsarau, A.; Li, H.; Herman, A.; Evers, K.-U.; Shen, H. Loads on Structure and Waves in Ice (LS-WICE) Project, Part 1: Wave Attenuation and Dispersion in Broken Ice Fields. In Proceedings of the International Conference on Port and Ocean Engineering Under Arctic Conditions (POAC), Busan, Korea, 11–16 June 2017. [Google Scholar]
- Herman, A.; Evers, K.-U.; Reimer, N. Floe-size distributions in laboratory ice broken by waves. Cryosphere 2018, 12, 685–699. [Google Scholar] [CrossRef] [Green Version]
- Tsarau, A.; Sukhorukov, S.; Herman, A.; Evers, K.-U.; Løset, S. Loads on Structure and Waves in Ice (LS-WICE) project, Part 3: Ice-structure interaction under wave conditions. In Proceedings of the International Conference on Port and Ocean Engineering Under Arctic Conditions (POAC), Busan, Korea, 11–16 June 2017. [Google Scholar]
- Hartmann, M.C.N.; von Bock und Polach, R.; Klein, M. Damping of regular waves in model ice. In Proceedings of the 39th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Fort Lauderdale, FL, USA, 3–7 August 2020. [Google Scholar]
- Marchenko, A.; Haase, A.; Jensen, A.; Lishman, B.; Rabault, J.; Evers, K.; Shortt, M.; Thiel, T. Elasticity and viscosity of ice measured in the experiment on wave propagation below the ice in HSVA ice tank. In Proceedings of the 25th IAHR International Symposium on Ice, The International Association for Hydro-Environment Engineering and Research, Trondheim, Norway, 23–25 November 2020. [Google Scholar]
- Marchenko, A.; Haase, A.; Jensen, A.; Lishman, B.; Rabault, J.; Evers, K.-U.; Shortt, M.; Thiel, T. Laboratory investigations of the bending rheology of floating saline ice and wave damping in the HSVA ice tank. In Proceedings of the HYDRALAB+ Joint User Meeting, Bucharest, Romania, 22–23 May 2019. [Google Scholar]
- Passerotti, G.; Alberello, A.; Dolatshah, A.; Bennetts, L.; Puolakka, O.; von Bock und Polach, F.; Klein, M.; Hartmann, M.; Monbaliu, J.; Toffoli, A. Wave Propagation in Continuous Sea Ice: An Experimental Perspective. In Proceedings of the 39th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), American Society of Mechanical Engineers Digital Collection, Fort Lauderdale, FL, USA, 3–7 August 2020. [Google Scholar]
- Marchenko, A.; Lishman, B.; Wrangborg, D.; Thiel, T. Thermal Expansion Measurements in Fresh and Saline Ice Using Fiber Optic Strain Gauges and Multipoint Temperature Sensors Based on Bragg Gratings. J. Sens. 2016, 2016, 5678193. [Google Scholar] [CrossRef] [Green Version]
- Batyaev, E.A.; Khabakhpasheva, T.I. Hydroelastic waves in a channel covered with a free ice sheet. Fluid Dyn. 2015, 50, 775–788. [Google Scholar] [CrossRef]
- Lishman, B.; Marchenko, A.; Sammonds, P.; Murdza, A. Acoustic emissions from in situ compression and indentation experiments on sea ice. Cold Reg. Sci. Technol. 2020, 172, 102987. [Google Scholar] [CrossRef]
- Marchenko, A. Bending Rheology of Floating Saline Ice and Wave Damping—Waves in Ice; BRWD-Waves in Ice; Data Storage Plan—Project HY+_HSVA-06; Large Ice Model Basin (LIMB), Hamburg Ship Model Basin; Hydralab+: Hamburg, Germany, 2018; 20p. [Google Scholar] [CrossRef]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sea Depth, km | Ice Thickness, m | Wave Amplitude, mm | Wave Period, s | |
|---|---|---|---|---|
| Crary et al., 1952 | 3.4–3.8 | - | 0.5 | 5–40 |
| Hunkins, 1962 | >1 | 3 | 5 | 15–60 |
| LeShack and Haubrich, 1964 | 3 | 1–3 | 0.5 | 20–60 |
| Sytinskii and Tripol’nikov, 1964 | >1 | 3 | 0.5 | 20–40 |
| Mahoney et al., 2016 | 0.15 | - | 1.2–1.8 | 30–50 |
| TG 1 | TG 2a | TG 2b | |||||||||||||
| , mm | 5 | 10 | 15 | 5 | 5 | 5 | 5 | 5 | 5 | 10 | 10 | 10 | 10 | 10 | 10 |
| , Hz | 7 | 7 | 7 | 5 | 6 | 7 | 8 | 9 | 10 | 5 | 6 | 7 | 8 | 9 | 10 |
| °C | −0.72/−0.99 | −0.59/−0.65 | −0.58/−0.64 | ||||||||||||
| , MPa | 46 | 88/126 | |||||||||||||
| , kPa | 62.5 | 84.6/80.8 | |||||||||||||
| TG 2, MOV | TG 3 | TG 3, MOV | |||||||||||||
| , mm | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | ||||||
| , Hz | 6 | 8 | 10 | 10 | 8 | 6 | 10 | 8 | 6 | ||||||
| °C | −0.6/−0.69 | −0.51/−0.67 | −0.58/−0.69 | ||||||||||||
| , MPa | 126 | 378/365 | |||||||||||||
| , kPa | 80.8 | 121.7/99.5 | |||||||||||||
| Mode | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
|---|---|---|---|---|---|---|---|---|---|
| , Hz | 0.035 | 0.070 | 0.104 | 0.137 | 0.168 | 0.198 | 0.226 | 0.252 | |
| , Hz | 0.226 | 0.378 | 0.479 | 0.557 | 0.624 | 0.684 | 0.739 | 0.790 | |
| MPa | 0.226 | 0.380 | 0.489 | 0.590 | 0.711 | 0.870 | 1.081 | 1.357 | |
| MPa | 0.226 | 0.382 | 0.500 | 0.632 | 0.812 | 1.068 | 1.413 | 1.859 | |
| MPa | 0.227 | 0.390 | 0.549 | 0.785 | 1.151 | 1.672 | 2.362 | 3.231 |
| 0.7 (TG 1) | 1.0 (TG 2a) | 0.8 (TG 3) | 1.0 (TG 3) | 0.8 (TG 2, MOV) | |||
|---|---|---|---|---|---|---|---|
| , mm | 5 | 10 | 15 | 5 | 10 | 10 | |
| , MPa | 46 | 107 | 371 | 107 | |||
| , m/s | 3 | 3.5 | 4 | 4.3 | - | ||
| , m−1 | 2.47 | 2.27 | 2.2 | 3.4 | 4.2 | 4.3 | 5 |
| , MPas | 73.7 | 155.9 | 371 | 357.7 | - | ||
| Experiment | Hit Count | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Ch1 | Ch2 | Ch3 | Ch4 | Ch5 | Ch6 | Ch7 | Ch8 | ||
| TG 2b | 0.8 | 689 | 4551 | 6005 | 65 | 3 | 6 | 12 | 0 |
| TG 2, MOV | 0.8 | 212 | 975 | 2540 | 0 | 1 | 1 | 22 | 0 |
| TG 3 | 0.8 | 8318 | 6659 | 1301 | 0 | 1 | 0 | 4 | 1 |
| TG 3, MOV | 0.8 | 3512 | 2277 | 422 | 0 | 0 | 0 | 5 | 1 |
| TG 3 | 0.6 | 9485 | 5166 | 1442 | 0 | 1 | 1 | 6 | 6 |
| TG 3, MOV | 0.6 | 5336 | 3184 | 1425 | 0 | 0 | 1 | 5 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marchenko, A.; Haase, A.; Jensen, A.; Lishman, B.; Rabault, J.; Evers, K.-U.; Shortt, M.; Thiel, T. Laboratory Investigations of the Bending Rheology of Floating Saline Ice and Physical Mechanisms of Wave Damping in the HSVA Hamburg Ship Model Basin Ice Tank. Water 2021, 13, 1080. https://0-doi-org.brum.beds.ac.uk/10.3390/w13081080
Marchenko A, Haase A, Jensen A, Lishman B, Rabault J, Evers K-U, Shortt M, Thiel T. Laboratory Investigations of the Bending Rheology of Floating Saline Ice and Physical Mechanisms of Wave Damping in the HSVA Hamburg Ship Model Basin Ice Tank. Water. 2021; 13(8):1080. https://0-doi-org.brum.beds.ac.uk/10.3390/w13081080
Chicago/Turabian StyleMarchenko, Aleksey, Andrea Haase, Atle Jensen, Ben Lishman, Jean Rabault, Karl-Ulrich Evers, Mark Shortt, and Torsten Thiel. 2021. "Laboratory Investigations of the Bending Rheology of Floating Saline Ice and Physical Mechanisms of Wave Damping in the HSVA Hamburg Ship Model Basin Ice Tank" Water 13, no. 8: 1080. https://0-doi-org.brum.beds.ac.uk/10.3390/w13081080