3.1. Discrepancy under Flowing Water and Laboratory Conditions
Phase 1 laboratory experiments (Series 1) were designed to isolate the inherent difference between sensors under conditions of zero radiation (
Table 2). In all cases, the discrepancy was within the 0.2 °C (
i.e., stated manufacturer accuracy). The difference between exposed and shielded sensors in Phase 2, under 100 W m
−2 artificial light (approx. 250 W m
−2 total spectrum), reflect the combination of sensor accuracy and radiative effects. The radiative error could therefore be isolated by subtracting the discrepancy from Phase 1 from that in Phase 2 (
Table 2). Consequently, the maximum radiative error in still-water aquaria under laboratory conditions was 0.15 °C with an average of 0.12 °C (
n = 12). This difference was achieved when measuring maximum temperatures every 5 min.
Identical experiments in low water velocities (0.1 m s
−1) had a maximum difference of 0.05 °C and an average of 0.03 °C (
n = 12). On some occasions the shielded sensor recorded higher Tw than the exposed sensor because the impact of the direct radiation was less than the variance in accuracy between sensors (
Table 2). In all cases, the error was greatest when recording maximum temperatures in comparison to minimum or 5-minute average temperatures. Overall, radiative errors were reduced by an order of magnitude in the presence of flowing water due to heat advection.
Table 2.
Average difference (°C) in Tw for two Tinytag sensors recording maximum temperature over 5-minute intervals in still- and flowing-water (0.1 m s−1). There are 12 experimental replicates. The two experimental phases are described above and the difference between Phase 1 (0 radiation) and 2 (100 W m−2) are included at the bottom row of each table to show the effect of radiation.
Table 2.
Average difference (°C) in Tw for two Tinytag sensors recording maximum temperature over 5-minute intervals in still- and flowing-water (0.1 m s−1). There are 12 experimental replicates. The two experimental phases are described above and the difference between Phase 1 (0 radiation) and 2 (100 W m−2) are included at the bottom row of each table to show the effect of radiation.
| Still-water replicates | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|
| Phase 1 | 0.04 | –0.03 | –0.01 | –0.04 | –0.07 | 0.07 | 0.07 | 0.07 | 0.04 | 0.12 | 0.01 | 0.01 |
| Phase 2 | 0.17 | 0.06 | 0.14 | 0.10 | 0.08 | 0.22 | 0.16 | 0.18 | 0.16 | 0.20 | 0.16 | 0.15 |
| Difference | 0.12 | 0.09 | 0.15 | 0.14 | 0.15 | 0.14 | 0.09 | 0.10 | 0.13 | 0.08 | 0.15 | 0.13 |
| Flowing-water replicates | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| Phase 1 | –0.05 | 0.04 | 0.02 | –0.07 | –0.07 | 0.04 | 0.01 | 0.06 | –0.05 | –0.07 | 0.02 | –0.07 |
| Phase 2 | –0.02 | 0.09 | 0.04 | –0.02 | –0.04 | 0.07 | 0.02 | 0.10 | –0.02 | –0.02 | 0.04 | –0.04 |
| Difference | 0.03 | 0.05 | 0.03 | 0.05 | 0.03 | 0.02 | 0.01 | 0.04 | 0.02 | 0.05 | 0.02 | 0.04 |
3.2. Discrepancy due to Sensor Shielding
Table 3 shows the average discrepancy between measurements for sensors that were shielded or unshielded over 5-days in Series 2 experiments, with 5-minute sampling of mean, maximum and minimum temperatures
. When all loggers are not exposed to direct light, the discrepancy in Ta is 0.17 °C between the sets that are later shielded or unshielded. Under conditions of ambient solar radiation, the discrepancy in Tw between shielded and unshielded sensors increases. Treatments 2 and 3 have mean discrepancies of 0.36 °C and 0.53 °C, respectively, with variance between shielded and unshielded sensors being greater for maximum values. The largest instantaneous difference in Tw between a shielded and unshielded sensor during Treatments 2 and 3 was 1.6 °C.
The variance in Tw amongst the three exposed sensors was always slightly greater than the variance amongst the three shielded sensors (
Table 3), perhaps due to local shading by the edge of the aquaria preferentially affecting unprotected sensors. Variability in readings between the three shielded sensors increased and decreased in parallel to that of the exposed sensors between treatments, suggesting that environmental conditions do affect the accuracy of shielded sensors, albeit slightly less than for exposed sensors. Consequently, shielding does not completely standardise conditions between sensors, with discrepancies between shielded sensors only 0.04 °C lower than discrepancies between unprotected sensors. This could be due to reflected light penetrating the shielding or due to differential heating of the shields depending on the exact position of the sensor within the aquaria.
Table 3.
Mean difference over 5-days in Series 2 experiments of 5-minute interval maximum, mean and minimum temperature for the three exposed sensors, three shielded sensors and across all the sensors, indicating the maximum difference between values from exposed and shielded sensors.
Table 3.
Mean difference over 5-days in Series 2 experiments of 5-minute interval maximum, mean and minimum temperature for the three exposed sensors, three shielded sensors and across all the sensors, indicating the maximum difference between values from exposed and shielded sensors.
| Treatment | Record type | Exposed sensors | Shielded sensors | All sensors |
|---|
| Treatment 1 (indirect radiation) | Maximum Ta | 0.07 | 0.10 | 0.17 |
| Mean Ta | 0.07 | 0.10 | 0.17 |
| Minimum Ta | 0.07 | 0.10 | 0.17 |
| Treatment 2 (direct radiation) | Maximum Tw | 0.16 | 0.12 | 0.36 |
| Mean Tw | 0.16 | 0.12 | 0.35 |
| Minimum Tw | 0.16 | 0.12 | 0.35 |
| Treatment 3 (direct radiation) | Maximum Tw | 0.12 | 0.09 | 0.40 |
| Mean Tw | 0.12 | 0.09 | 0.39 |
| Minimum Tw | 0.12 | 0.09 | 0.39 |
| Treatment 4 (direct radiation) | Maximum Tw | 0.18 | 0.15 | 0.53 |
| Mean Tw | 0.18 | 0.15 | 0.53 |
| Minimum Tw | 0.18 | 0.15 | 0.52 |
As noted above, the difference in Ta between sensors that were later exposed or shielded was, on average less than 0.2 °C during Treatment 1 (with maximum discrepancy of 0.34 °C). This represents the inherent error between sensors. Consequently, approximately half of the discrepancy between shielded and exposed sensors in Treatments 2 to 4 can be explained by variance in sensor accuracy. The remainder is thought to be explained by radiative effects.
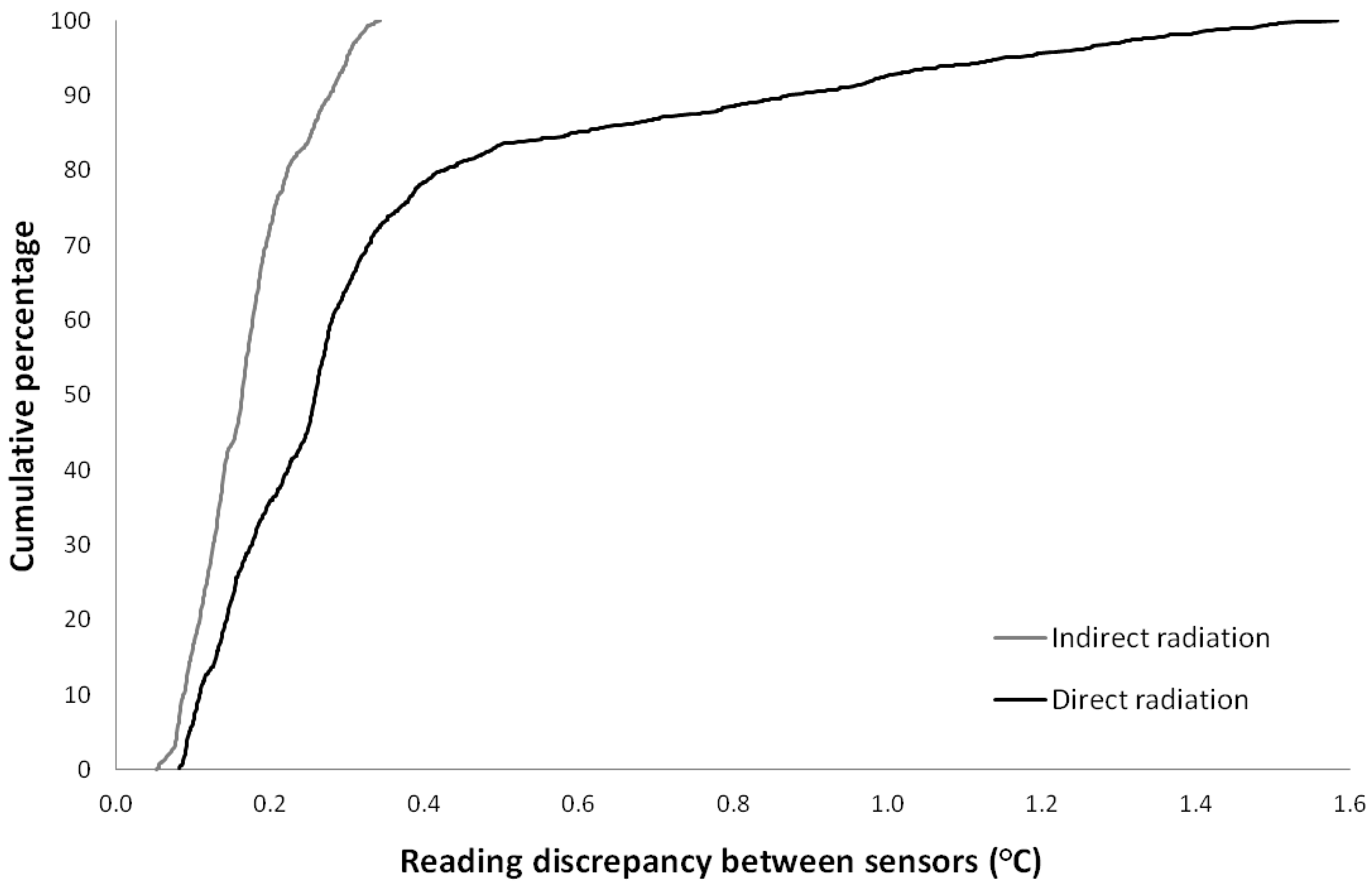
Figure 2 shows the cumulative frequency distribution of errors associated with 5 minute, maximum readings for conditions of indirect radiation and direct radiation. It is clear that sensor discrepancies of ≤0.35 °C are common, constituting 100% of discrepancies for indirect radiation, and 73% for those exposed under direct solar radiation (Treatment 2).
3.3. Discrepancy due to Sensor Type
Under Series 2 test conditions with indirect radiation (Treatment 1), the mean Ta recorded over 5-minute by the single HOBO pendant was always higher than that recorded by Tinytags. Under conditions of direct solar radiation (Treatment 2), the HOBO pendant was, on average, 0.6 °C warmer than the warmest of the three exposed Tinytag sensors, but this discrepancy reached a maximum of 3.8 °C. The shielded HOBO pendant recorded higher Tw than the three exposed sensors 70% of the time and higher Tw than the shielded Tinytags 100% of the time (being on average 0.43 °C warmer than the warmest shielded Tinytag). This suggests that differences in recordings due to shielding are smaller in magnitude than those associated with different sensor types (
Table 4). Consequently, it is essential that the same make of sensor is used throughout networks and caution is needed when comparing Tw measurements recorded by different devices.
Figure 2.
Cumulative frequency distribution of discrepancies between shielded and exposed sensors under indirect (Treatment 1) and direct sunlight (Treatment 2).
Figure 2.
Cumulative frequency distribution of discrepancies between shielded and exposed sensors under indirect (Treatment 1) and direct sunlight (Treatment 2).
Table 4.
Maximum, mean and minimum differences in 5-minute interval mean Tw between the HOBO pendant and warmest exposed Tinytag sensor at any moment. The percentage of time that the HOBO pendant is warmer than the warmest exposed Tinytag sensor is also shown.
Table 4.
Maximum, mean and minimum differences in 5-minute interval mean Tw between the HOBO pendant and warmest exposed Tinytag sensor at any moment. The percentage of time that the HOBO pendant is warmer than the warmest exposed Tinytag sensor is also shown.
| Temperature difference between sensors | Indirect solar radiation, exposed | Direct solar radiation, exposed | Direct solar radiation, shielded |
|---|
| Treatment 1 (Ta) | Treatment 2 (Tw) | Treatment 3 (Tw) | Treatment 4 (Tw) |
|---|
| Maximum difference | 0.36 | 3.81 | 3.19 | 0.68 |
| Mean difference | 0.15 | 0.67 | 0.63 | 0.08 |
| Minimum difference | 0.01 | 0.05 | −0.03 | −0.37 |
| Time warmest (%) | 100 | 100 | 99.7 | 70.2 |
3.5. Discrepancy Due to Levels of Irradiance
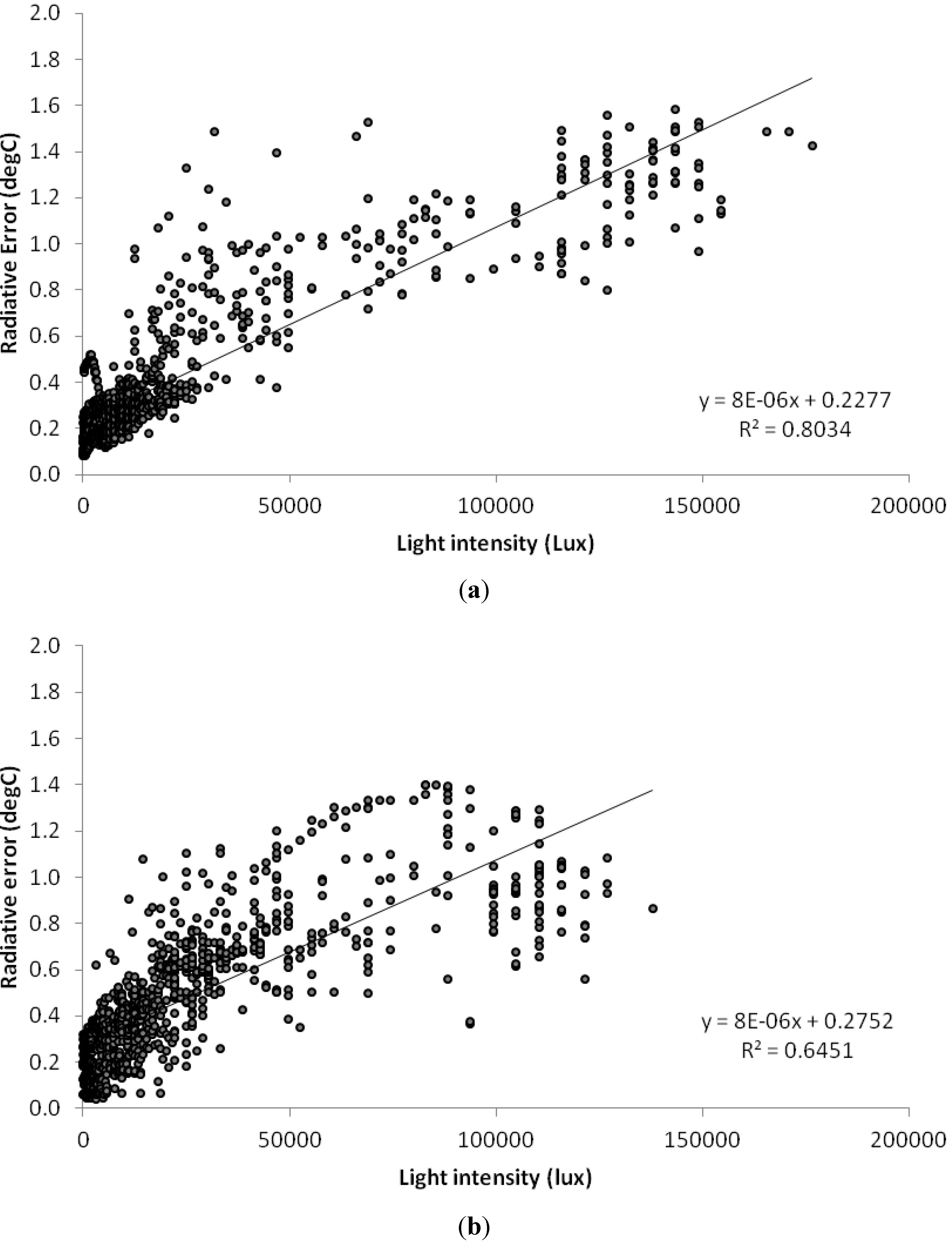
Discrepancies between exposed and shielded sensors in Series 2 experiments increase under greater light intensities. Regression analysis demonstrates a strong linear relationship between the two, with coefficients of variation of 0.80 for Treatment 2 and 0.64 for Treatment 3 (
Figure 3). Despite Treatment 2 and 3 occurring over different days, the regression equations are similar. In both cases, the gradient term is 8 × 10
−6, which means that a 0.5 °C increase in measurement discrepancy requires an additional 62,500 lux of light (approximately 200 W m
−2 in the visible spectrum and 400 W m
−2 total), which is in the range of direct sunlight (30 to 130,000 lux). The intercepts of the linear regressions are 0.23 °C and 0.28 °C for Treatments 2 and 3, respectively. This is broadly consistent with the results in
Table 2 and the quoted accuracy of the sensors, which suggest that the inherent error in Tw measured with Tinytags is on average 0.20 °C and maximally 0.38 °C. In addition, the average discrepancy at night, when illuminance is zero, was 0.19 °C (maximum 0.38 °C) for Treatment 2 and 0.20 °C (maximum 0.36 °C) for Treatment 3, providing further confirmation of the magnitude of the variance between sensors.
Figure 3.
The relationship between illuminance and Tw discrepancy for Treatment 2 (a) and Treatment 3 (b) base on day-time data. Note that 100,000 lux is estimated to be ~300 W m−2 in the visible spectrum (i.e., 1000 W m−2 in total spectrum, equivalent to very bright, direct sunlight).
Figure 3.
The relationship between illuminance and Tw discrepancy for Treatment 2 (a) and Treatment 3 (b) base on day-time data. Note that 100,000 lux is estimated to be ~300 W m−2 in the visible spectrum (i.e., 1000 W m−2 in total spectrum, equivalent to very bright, direct sunlight).
There is some evidence that a non-linear relationship better describes the data because of an asymptote at higher light intensities (
Figure 3). This is thought to represent increased heat flux from Tinytags at high light intensities as the temperature of sensor casings rise above that of the surrounding water body. For the discrepancy between sensors to exceed 0.5 °C requires large increases in light intensity, achievable only through full, direct solar radiation. This is consistent with
Figure 2 which shows that discrepancies above 0.5 °C are rare, accounting for less than 20% of discrepancies in Treatment 2. Scatter in the relationship is interpreted as micro-environmental effects, including the potential for sensors to be partially shaded by the sides of the opaque aquarium at some sun angles, short periods of cloud cover and/or rainfall. At measured values in excess of 100,000 lux, there is banding in the data recorded with the HOBO pendant. This is attributed to the effects of reflection of sunlight off of the sides of the white aquaria. This may also explain the change in the gradient of radiative error magnitude at extremely high lux values, suggesting that reflected light can contribute to total radiative error. This is consistent with Ta measurements over areas of snow cover where reflected light can substantially increase radiative errors, beyond those associated with direct radiation alone [
5].
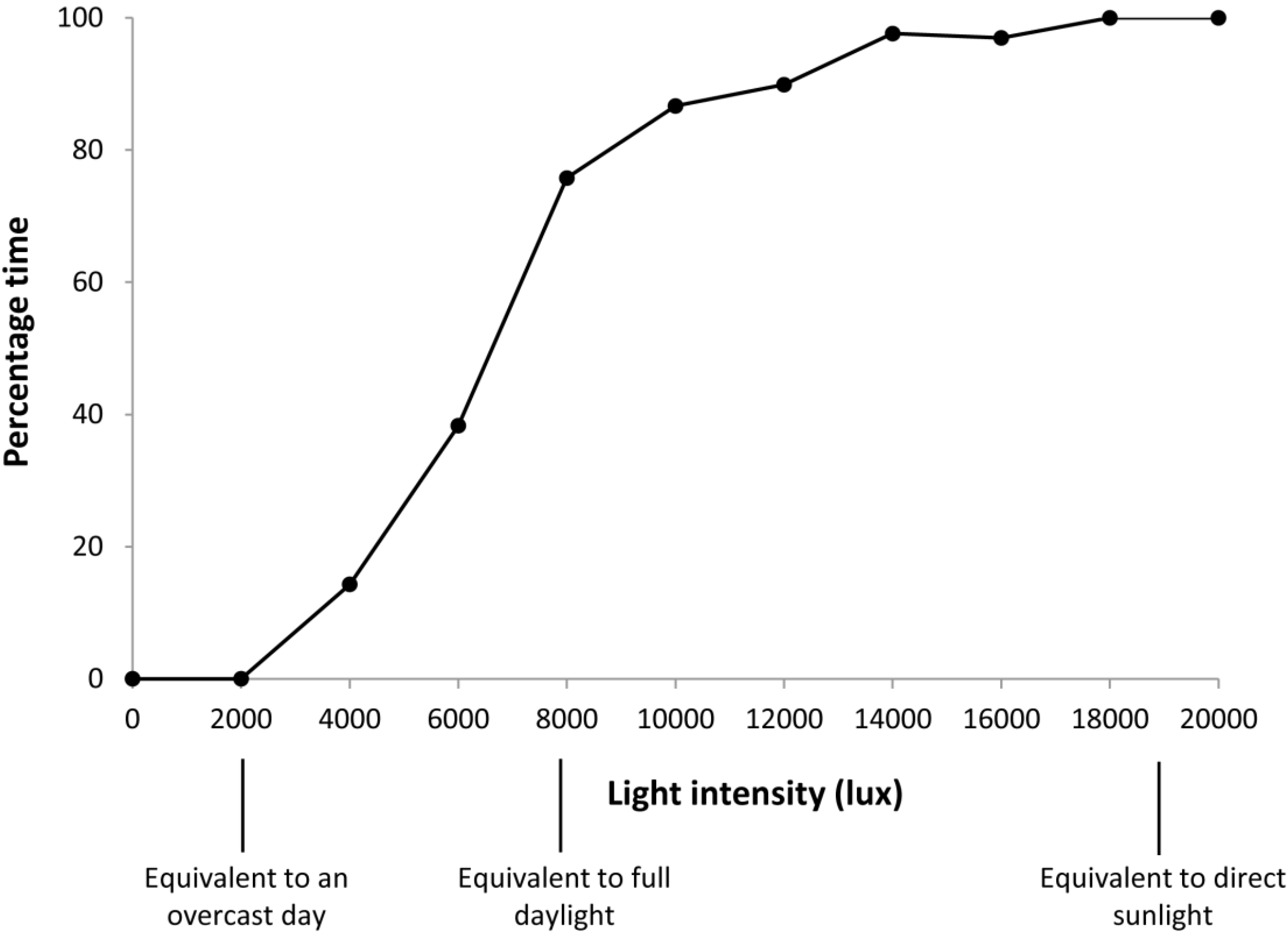
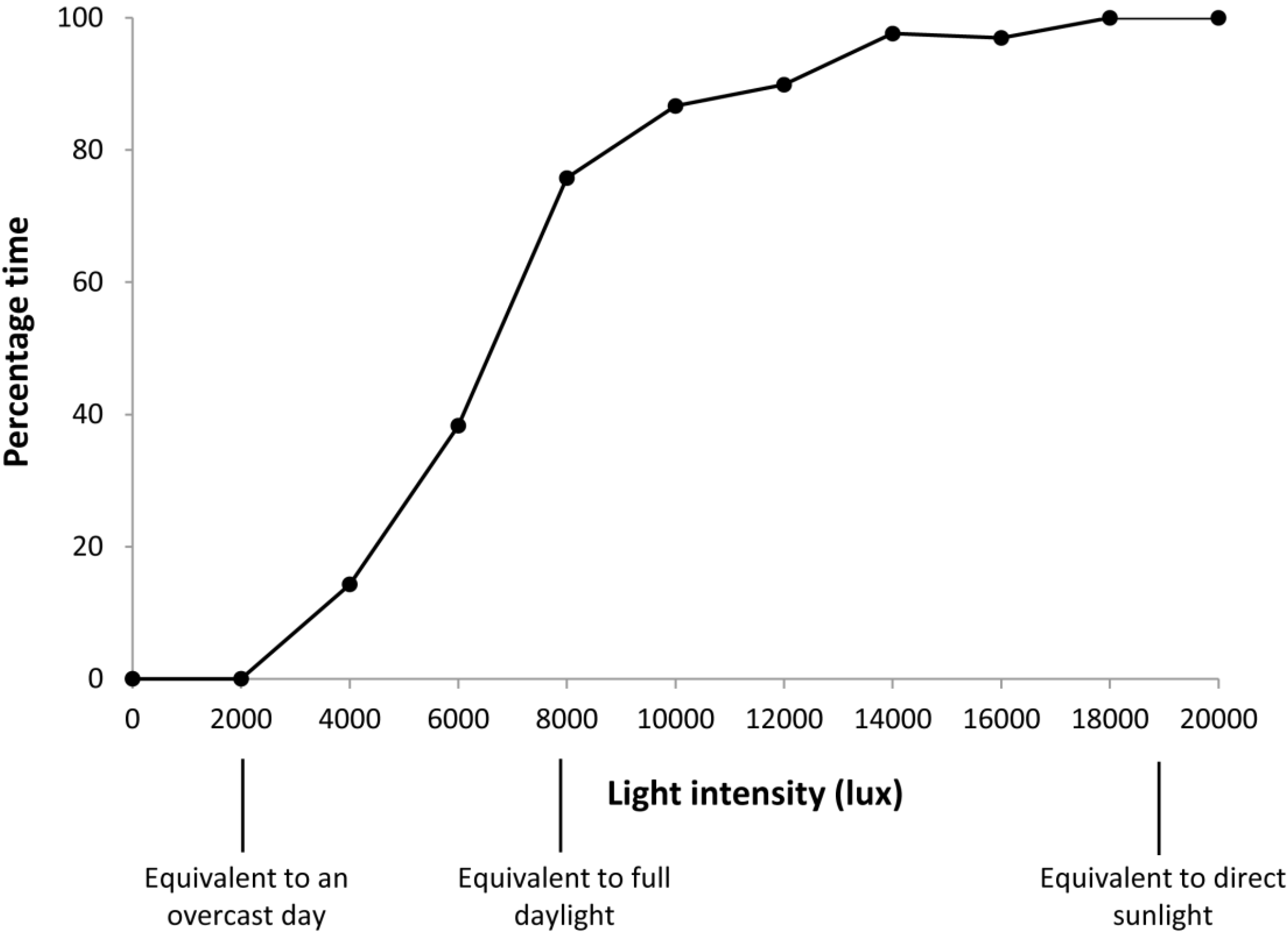
Exposed sensors were consistently warmer than shielded sensors during the day (here defined as when illuminance is greater than zero). However, for 40% of the daytime readings, at least one shielded sensor was warmer than at least one exposed sensor. In other words, shielding was not always sufficient to overcome the inherent difference in readings amongst some of the deployed Tinytags. For exposed sensors to be universally warmer, light intensities equivalent to full, direct sunlight were required (
Figure 4). At night, at least one shielded sensor was warmer than at least one exposed sensor for 100% of the time. This suggests that errors due to the inherent inaccuracy in sensor reading, as well as differences in micro-environmental conditions, were greater than errors incorporated through radiative effects for 40% of the time during the day. In addition, under nocturnal or low radiation, the shields used here appear to insulate the sensors because Tw minima were consistently higher than for exposed sensors.
Figure 4.
Cumulative frequency distribution showing the percentage of time that the three exposed sensors were the three warmest sensors under a given light intensity.
Figure 4.
Cumulative frequency distribution showing the percentage of time that the three exposed sensors were the three warmest sensors under a given light intensity.
3.6. Timing of Radiative Errors
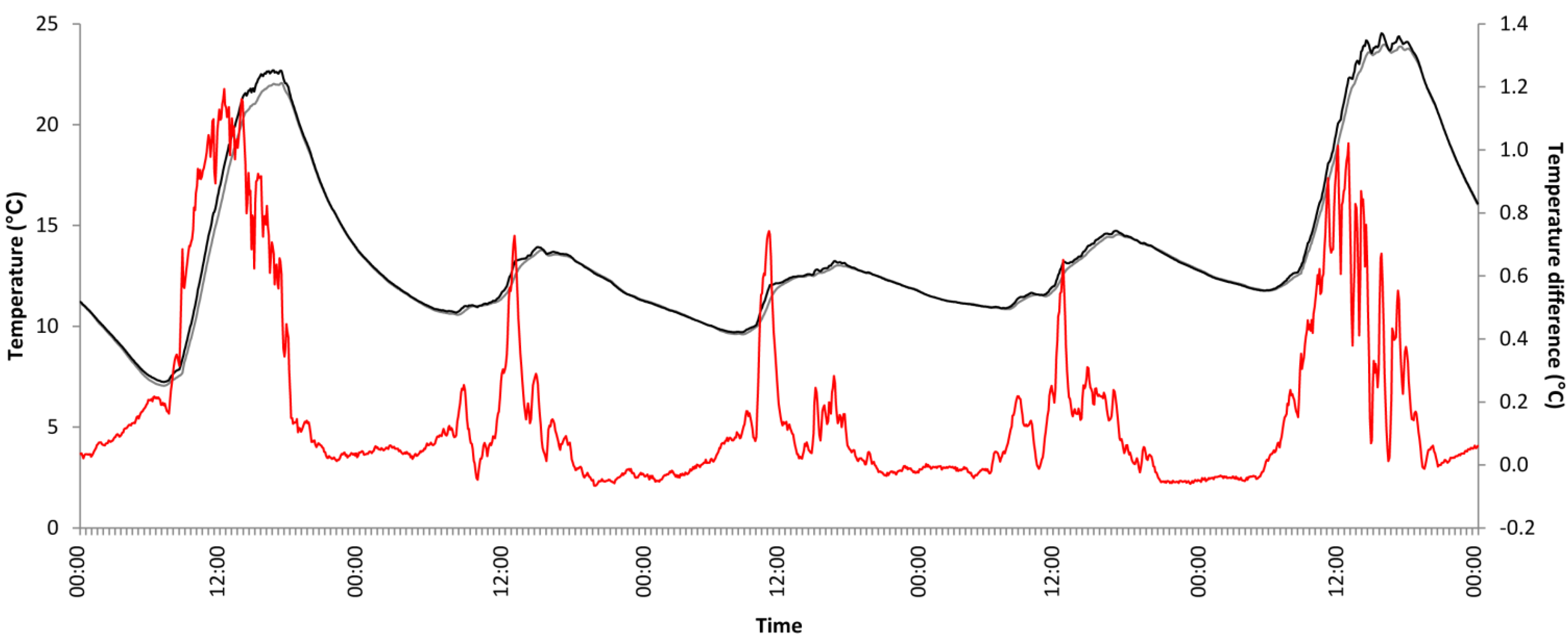
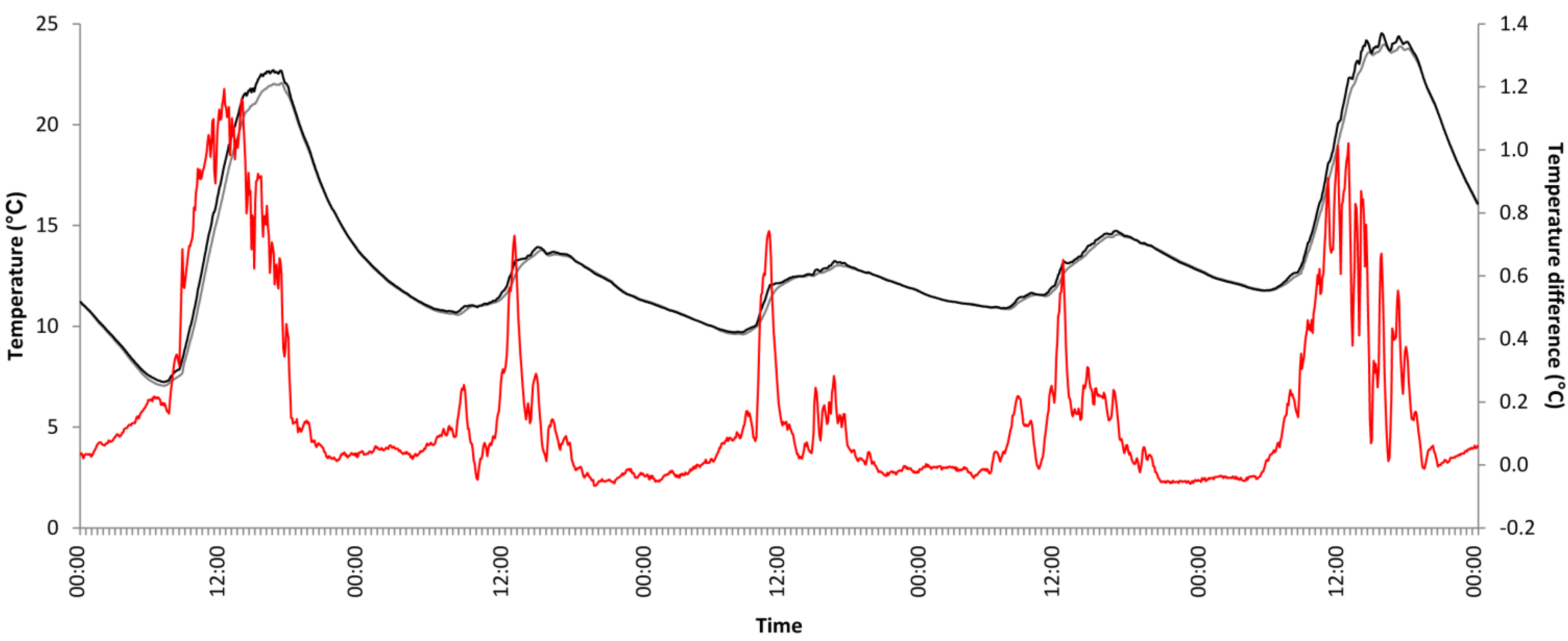
Time-series analysis suggests that Tw of shielded sensors lag behind those of exposed sensors (
Figure 5) because the thermal inertia of the Tinytags casing is less than the thermal inertia of the water body (plus aquaria contents). Hence, exposed sensors respond rapidly to changes in light intensity whereas shielded sensors respond to the warming of the water body. Consequently, radiative errors not only occur at peak temperatures during the early afternoon, but also on the rising limb of temperature time-series due to the response of exposed sensors to solar radiation, rather than the water body itself. Interestingly, on the falling limb of temperature time-series both exposed and shielded sensors plot similar Tw and rate-of-change, leading to minimal discrepancies. This pattern is consistent with other studies reporting that Tw reading inconsistencies occur on the rising limb of time-series [
2]. Therefore, the albedo of sensors is important and this may, at least partially, explain the differences in recorded temperatures between the HOBO pendant and Tinytag sensors. Our Tinytag sensors are yellow whereas HOBO pendants are transparent with a black plug at one end, so overall the latter has lower albedo.
Figure 5.
A 5-day time-series of maximum recorded temperatures by exposed (black-line) and shielded (grey-line) Tinytag sensors during Treatment 2. The discrepancy between exposed and shielded sensor is shown with a red-line (right axis values).
Figure 5.
A 5-day time-series of maximum recorded temperatures by exposed (black-line) and shielded (grey-line) Tinytag sensors during Treatment 2. The discrepancy between exposed and shielded sensor is shown with a red-line (right axis values).
3.7. Importance of Environmental Context
Experiments under natural sunlight show that there is a discrepancy in the readings between shielded and exposed sensors. This error is specific to the Tinytag sensors used here and the experimental conditions,
i.e., bright, direct sunlight and shallow (approximately 0.2 m deep), clear, still-water in white plastic aquaria. Consequently, the recorded radiative errors quoted here represent an extreme case compared with natural water-bodies where radiative errors are expected to be much lower. In particular, deeper water and the presence of suspended material would substantially reduce light penetration to sensors (
Table 6). It is known that there is an exponential decline in light penetration as water depth increases (Beer-Lambert Law [
7]) and that the magnitude of this decline is governed by the “Vertical Attenuation Coefficient” which depends on water turbidity. The local impact of environmental factors is likely to be complex given the substantial variability in parameters that effect light penetration and heat exchange. For example, it is not just the quantity of suspended material that affects light penetration, but also the shape, size and properties of the sediment [
17].
Table 6 lists environmental characteristics that will affect the penetration of light through the water column and, therefore, the potential to modify radiative effects. Other factors such as the amount of shading by the channel margin and landscape, elevation of the sun and flow velocity, would also modify the discrepancy between exposed and shielded sensors (
Table 6). Radiative errors associated with other sensor manufacturers may differ from those cited for Tinytags here as indicated by substantially different measurement made with a HOBO pendant. It may therefore be the case that some sensors, such as HOBOs are in greater need of shielding than other types. However, the environmental factors noted above would tend to reduce radiative errors regardless of sensor design.
Table 6.
Translation of laboratory findings to conditions in rivers, indicating the expected effect on radiation errors for a range of environmental factors.
Table 6.
Translation of laboratory findings to conditions in rivers, indicating the expected effect on radiation errors for a range of environmental factors.
| Experimental condition | Field condition | Impact | Source |
|---|
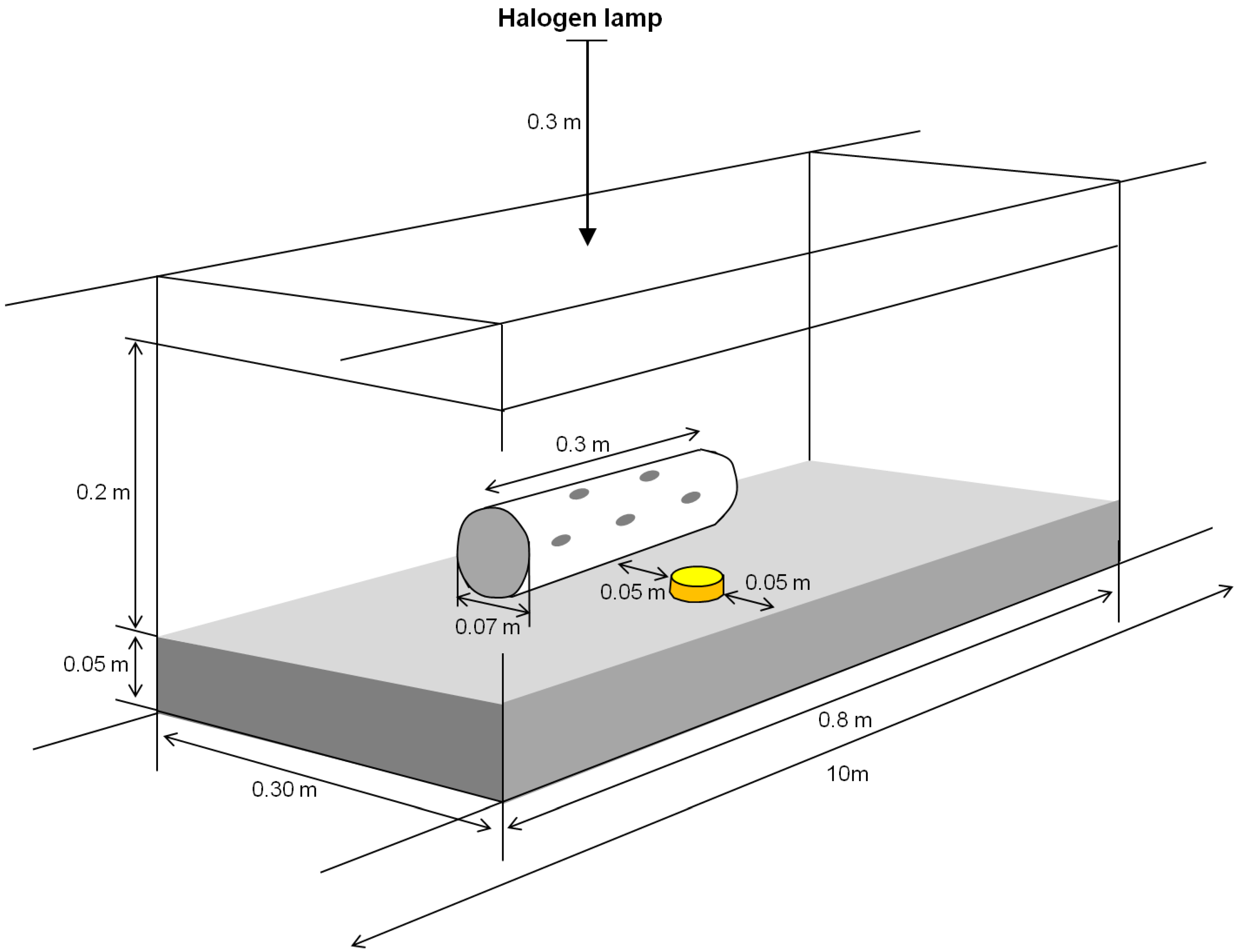
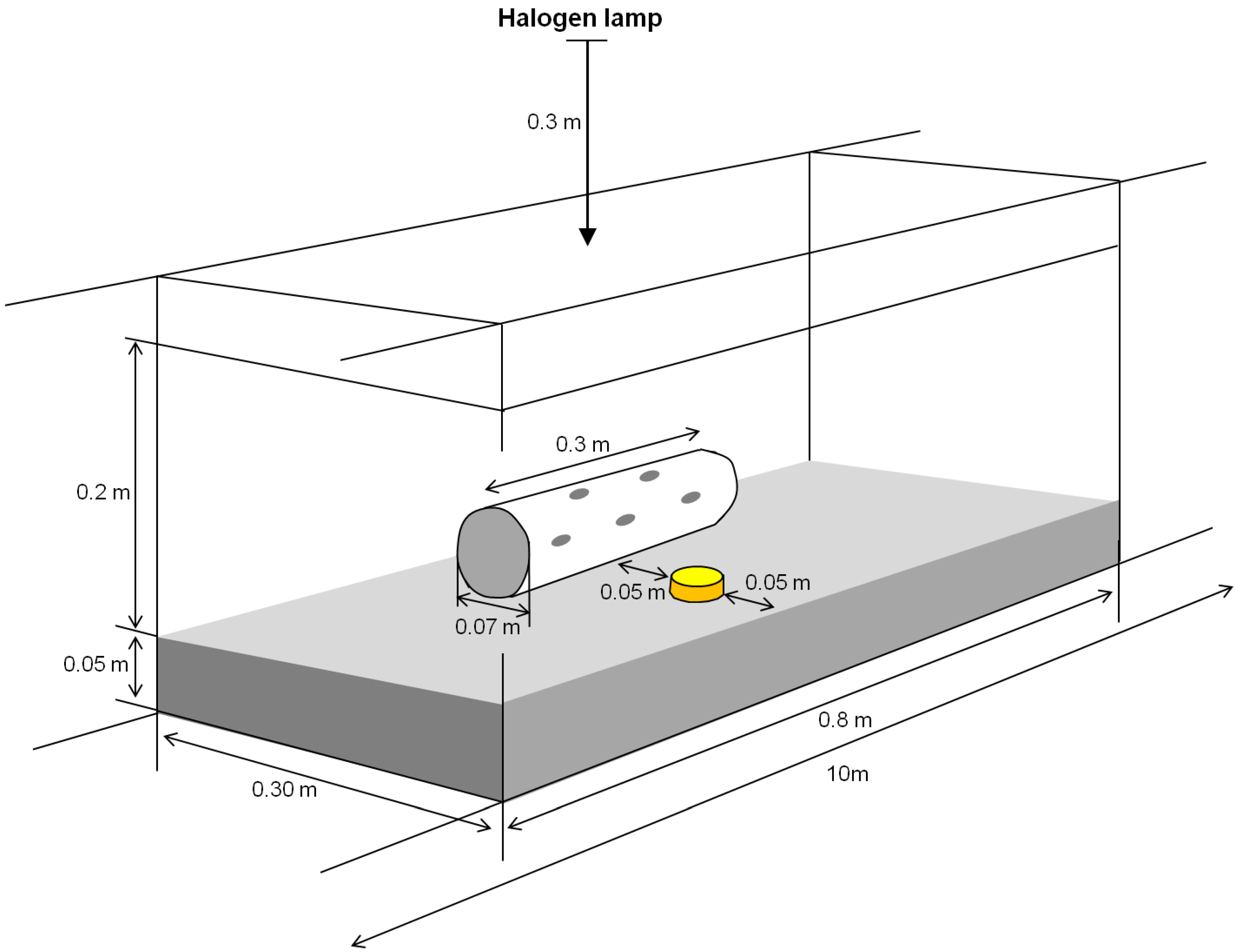
| Continuous light intensity of 100 W m−2 (approximately 250 W m−2 across total spectrum) | Global average irradiance 170 W m−2 (maximum approximately 1000 W m−2) | Increased potential for radiative errors relative to Series 1 experiments under higher light intensities which would occur in some locations, for some times of the year. Light intensity is uniform in laboratory. | [18] |
| 90° altitude angle of light source | 60° altitude angle possible at temperate latitudes (23.5 to 66.5° N). 90° is possible on the equator. | Decreased potential for radiative errors in field due to exponential reduction in light penetration with decreasing solar elevation angle. A reduction in Solar Zenith Angle from cos θ = 1 to 0.3 results in a reduction in light penetration by a factor of 7. | [19,20] |
| Direct sunlight | Presence of shade from landscape and vegetation | Decreased potential for radiative error because radiation is typically an order of magnitude lower in shade than in direct sunlight. | |
| 0.2 m water depth | Deeper and variable water depths | Decreased potential for radiative error in water deeper than 0.2 m because of the exponential reduction in light penetration with increasing water depth (Beer-Lambert Equation) | [7,21] |
| Clear, tap-water | Presence of suspended sediment | Decreased potential for radiative errors in all rivers due to reduced light penetration with increasing suspended sediment. Potential for particular light wavelengths to be preferentially scattered and absorbed. Linear relationship governed by the “vertical attenuation coefficient”. | [7,21] |
| Halogen lamp spectrum | Wider spectrum (solar 100 nm to 1 mm; halogen lamp: 500 to 1200 nm) | Increased radiation errors assuming greater absorption by sensor casing across wider spectrum, but dependent on sensor materials and albedo. | |
| Water velocity (0 and 10 cm s−1) | Larger and variable water velocities | Decreased radiative error at higher velocities due to greater heat advection in flowing water. Heat transfer coefficient potentially increases by three orders of magnitude from still to flowing water. | |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}