1. Introduction
Due to the economic and population growth, the dependence on electrical systems has equally grown to satisfy humanity’s basic needs, changing the habits and customs of how individuals live and work [
1]. To ensure this, three-phase distribution networks are used, which are responsible for interconnecting transmission and sub-transmission networks with end-users (i.e., residential, industrial, and commercial areas) requiring medium and low voltage [
2,
3]. These systems generally operate in an asymmetric manner due to the following factors. (i) The configurations on the distribution lines are asymmetrical since the transposition criterion is not applicable due to the short length of the lines [
4,
5]. (ii) The nature of the loads may be
,
, or
, which generates unbalances in voltages at the nodes and in the line currents [
6]. (iii) The arbitrary location of single-phase transformers on the phases of the system causes an unbalance in the currents through the lines [
7]. Load unbalances in distribution systems create undesirable scenarios such as the increase of current in any phase system, which produces an increase in power losses through its constituent elements [
8]. These power losses can exceed the capacity required to supply the demand, cause equipment to age, and increase investment and operating costs for network operators [
7,
9].
The importance of reducing power losses in distribution networks has established multiple approaches, such as (i) optimal placement and sizing of distributed generation [
10], (ii) optimal capacitor placement and sizing [
11], (iii) optimal network reconfiguration [
12], (iv) optimal conductor sizing in distribution networks [
13], (v) optimal power system restoration [
14], and (vi) optimal phase swapping [
15,
16]. These strategies can significantly help distribution companies to reduce the number of power losses. However, the first two approaches involve significant investments since they integrate new devices into the distribution network [
17]. The third approach requires less investment since few distribution lines need to be constructed to realize the optimal network reconfiguration [
18]. The fourth approach also requires high investment as the system conductors need to be renewed [
19]. The fifth methodology is more appropriate for operation of the power system after fault isolation. The sixth strategy is the most economical as it requires few teams to reconfigure the system loads without investing in new equipment [
20]. Bearing in mind the low phase swapping costs to minimize the power losses in ADSs, a new master–slave optimization strategy is proposed to solve this problem.
In the specialized literature, the balance phase problem, with the minimizing power losses approach, has been solved using different optimization methods, including the Chu and Beasley genetic algorithms [
8,
16,
21,
22,
23,
24], particle swarm optimization [
9], mixed-integer convex optimization [
25], bat optimization algorithm [
26], differential evolution algorithm [
27], simulated annealing optimizer [
28], and vortex search algorithm [
15], among others.
The main feature of the optimization methodologies described above is that they employ the master–slave optimization scheme to solve the problem [
15]. The master defines the connection of the loads to the nodes. The slave is typically a power flow tool that allows one to revise and exploit the solution space through the power losses calculation [
16].
Similar to the metaheuristic optimization methods described above, a master–slave methodology is proposed in this work to solve the phase swapping problem in ADSs. The proposed optimization algorithm corresponds to an improved version of the crow optimization algorithm (CSA) to select the connection of the loads in the master stage, together with the use of the iterative sweep power flow method in its three-phase version in the slave stage. In the master stage, the connection of each load is defined using an integer encoding between 1 and 6, which represents the six possible connection forms for a three-phase charge [
8]. The slave stage is responsible for evaluating the power flow to determine the total power losses for the connection set provided in the master stage [
15]. Improvements in the classical CSA are carried out in the crow avoidance stage based on a probability criterion [
29]. If the probability is higher than the crow knowledge probability (
), the new crow position
i is provided using the classical CSA exploration proposed in [
29]. Likewise, if the possibility is less than the crow knowledge probability (i.e.,
), the new crow position
i is generated through a regular Gaussian distribution (GD) used in the process of evolution of the vortex search algorithm (VSA) [
30]. The main benefit of the VSA is that the solution space can be explored and exploited through the use of hyper-spheres derived from the selection of an individual from the current population. It also clarifies that the criterion of evolution in our proposal is applied at each iteration, which implies that this process is of the adaptive type.
The main contributions of our proposal are listed below.
It proposes an improved approach for the classical CSA using the VSA evolution mechanism to revise and exploit the solution space.
The interaction between the improved CSA (i.e., ICSA) and the three-phase power flow (TPPF), based on the classical iterative sweep method, allows the application of phase swapping in radial or meshed systems with connected loads, either in Y or .
It is relevant to mention that, upon analyzing the specialized literature, there was no evidence of the CSA application to the phase swapping problem in distribution systems, which corresponds to a research gap that this work intends to fill. In addition, the numerical results obtained in test systems of 8, 25, and 37 nodes prove the quality of the algorithm when compared with classical metaheuristic optimization methodologies.
The structure of the remainder of the document takes the following form:
Section 2 presents the optimal phase swapping problem representation in ADSs,
Section 3 presents the ICSA incorporated with the TPPF method,
Section 4 portrays the electrical networks used in this research, and
Section 5 represents the obtained results for the connections set and the grid power losses. Finally,
Section 6 states the conclusions drawn from the development of this article.
5. Numerical Simulations
This section contains the numerical validation of the developed methodology to solve the phase swapping problem in 8-, 25-, and 37-node test systems, considering a given demand condition. In that sense, it uses the information provided by [
15], which presents two methodologies to solve the proposed problem. Note that the aim is to compare the results obtained by the proposed procedure with each optimization technique reported in [
15].
To solve the MINLP, formulated from (
1) through (
6), that represents the optimal phase swapping problem for ADSs, MATLAB
® V2020
a software is used on a laptop computer with an Intel(R) Core(TM) i5-7200U CPU @2.50 Ghz, a RAM of 8.00 GB, and a Windows 10 Home Single Language 64-bit operating system.
To test the efficiency of the proposed algorithm, the ICSA is compared with the Chu and Beasley genetic algorithm (CBGA) [
15], the VSA [
15], and the CSA. The parameters used for the CSA and ICSA are as provided in
Table 2. Furthermore, the parameters were established with ten individuals in the population, six hundred iterations, and one hundred evaluations to calculate the average processing time. The parameters for the CSA are those recommended by the author of the algorithm in [
29].
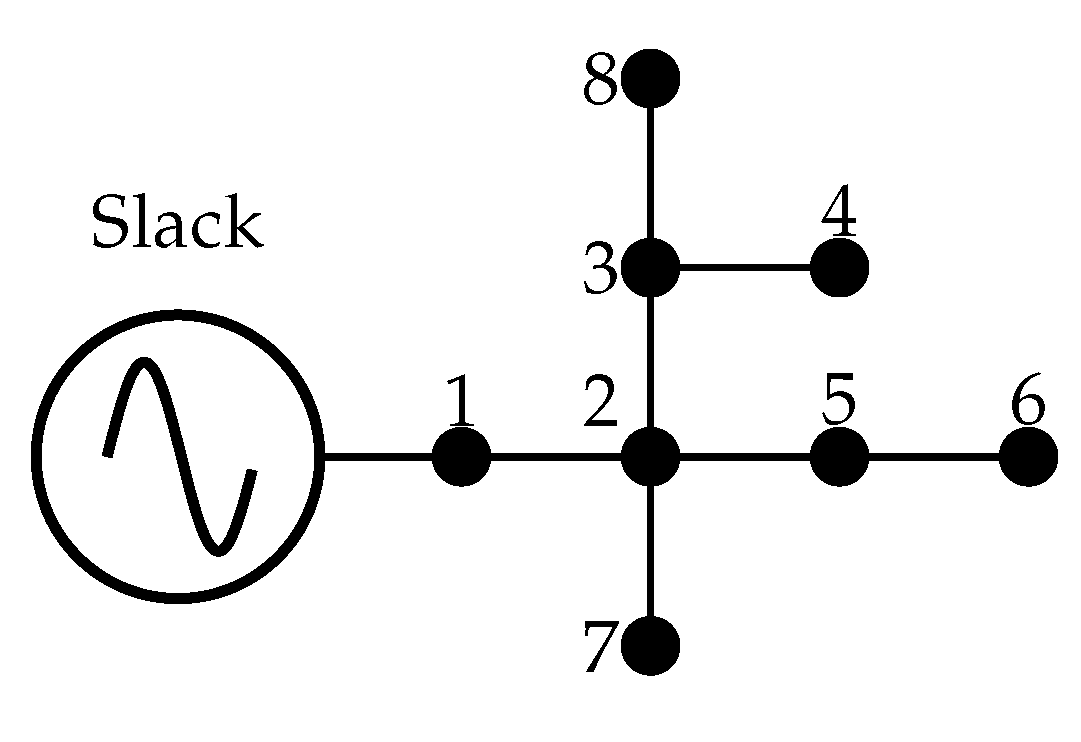
5.1. Results for the 8-Node System
Table 3 shows the results obtained by the proposed ICSA for the 8-node test system as follows: (i) all methodologies allow a reduction of more than 24% in total power losses; (ii) the solution obtained with the ICSA for the 8-node system equals those reported in [
15], which states that the optimal global solution for this system is 10.5968 kW, albeit with a much longer processing time; and (iii) the standard deviation for the ICSA shown in
Table 3 is
kW, which is at least ten times lower than in the VSA [
15]. These results indicate that the repeatability of the solutions is close to 100% when solving the phase swapping problem in the 8-node test system, bearing in mind that the solution space has dimensions of 279,936.
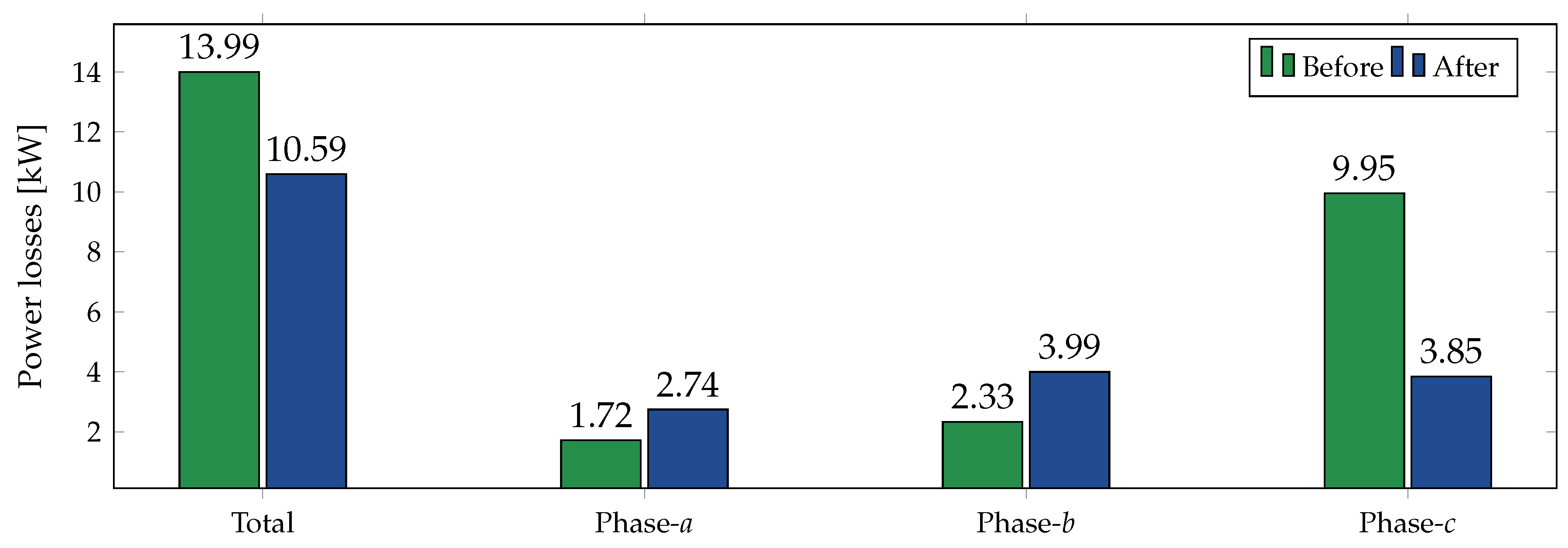
Figure 4 displays the variations of the phase power losses before and after the application of phase swapping with the ICSA, where the phase losses of
a and
b increase by 1.025 kW and 1.663 kW, respectively. On the contrary, the power losses in the electrical phase
c decrease by about 6.10 kW, which increases the offsets seen in the power losses of phases
a and
b. Additionally, the power losses per phase are close to the average of the total power losses of approximately 3.50 kW, with differences of less than 0.80 kW. These results indicate that phase swapping by ICSA is an effective way to redistribute the loads in the phases of the system as evenly as possible.
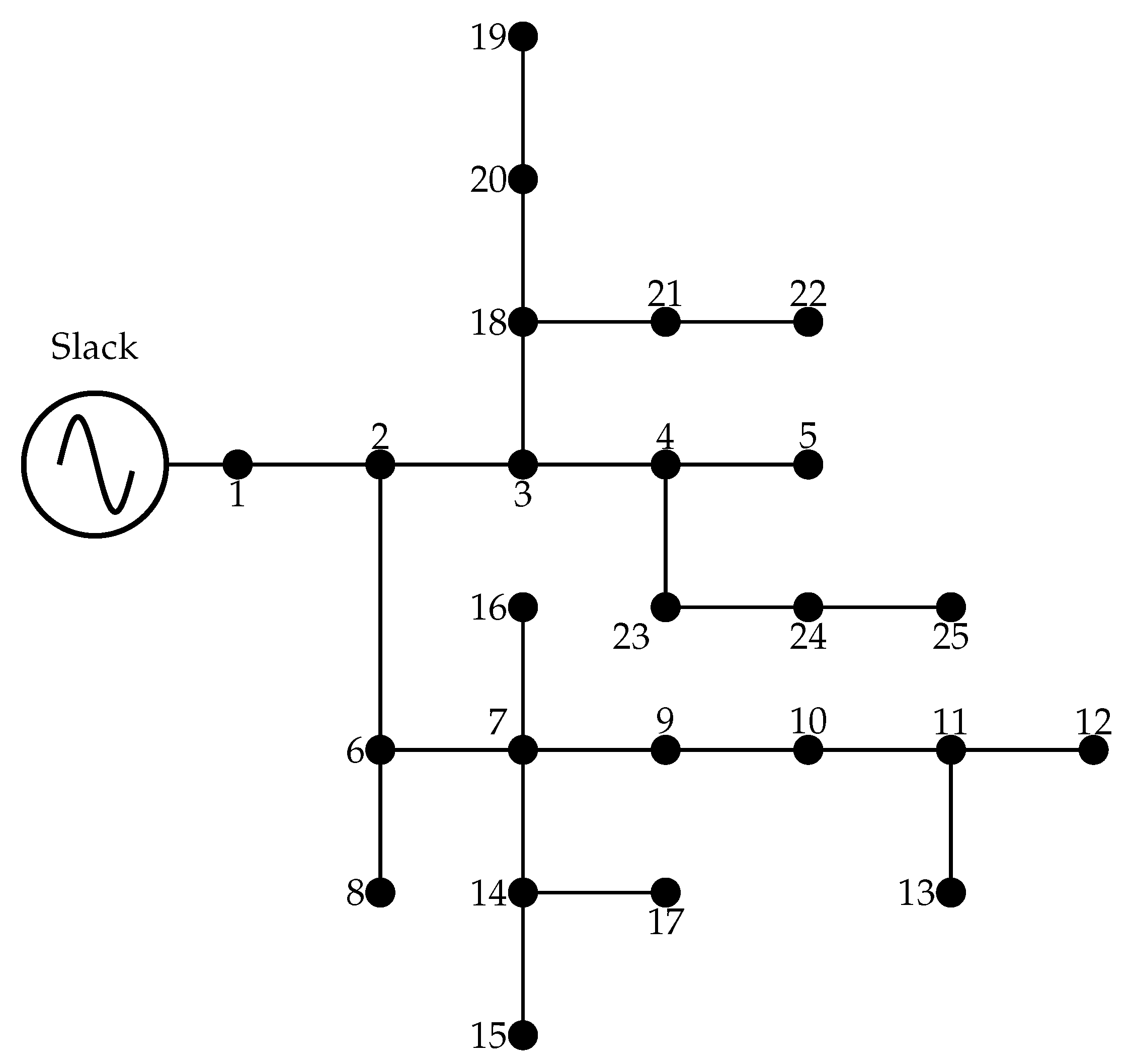
5.2. Results for the 25-Node System
Table 4 shows the results obtained by the proposed ICSA for the 25-node test system, where the following is evident: (i) the solution obtained with the ICSA for the 25-node system equals the one reported in [
15] for the VSA, which states that the optimal global solution for this system is 72.2888 kW; (ii) the solution obtained with the ICSA for the 25-node system outperforms the solution obtained with the CSA, which shows that the improvement made to the classical CSA explores and exploits the solution space for systems of large dimensions (i.e., 24 nodes in this case) in a better way; and (iii) the standard deviation for the ICSA, shown in
Table 4, is 0.0116 kW lower than those reported in [
15] and in CSA. This affirms the repeatability properties of the ICSA for solving the phase swapping problem, considering the size of the solution space, i.e.,
.
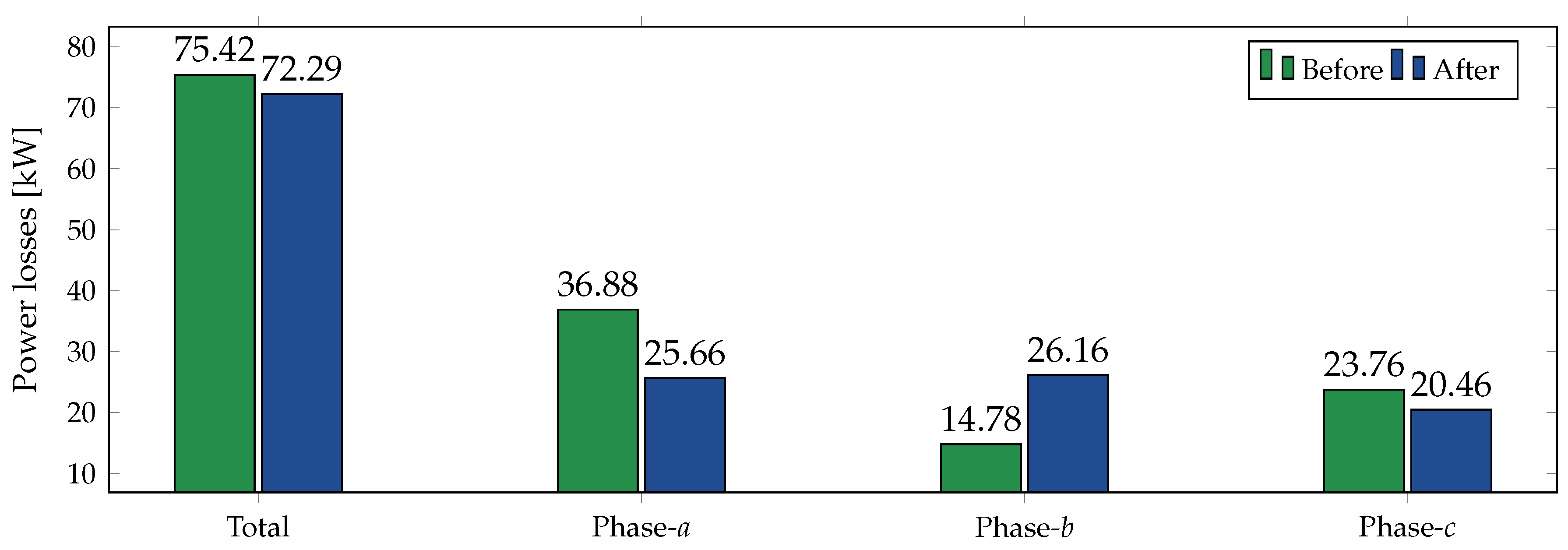
Figure 5 represents the variations of the phase power losses before and after the application of phase swapping with the ICSA, where the phase losses of
b increase by 11.3776 kW. On the other hand, the phase power losses of
a and
c approximately decrease by 11.2156 kW and 3.294 kW, respectively, which offsets the increase seen in the electrical phase
b power losses. Additionally, the phase power losses are close to the average of the total power losses, approximately 24 kW, with differences of less than 3.60 kW. These results indicate that phase swapping by ICSA is an effective way to redistribute the loads in the phases of the system as evenly as possible.
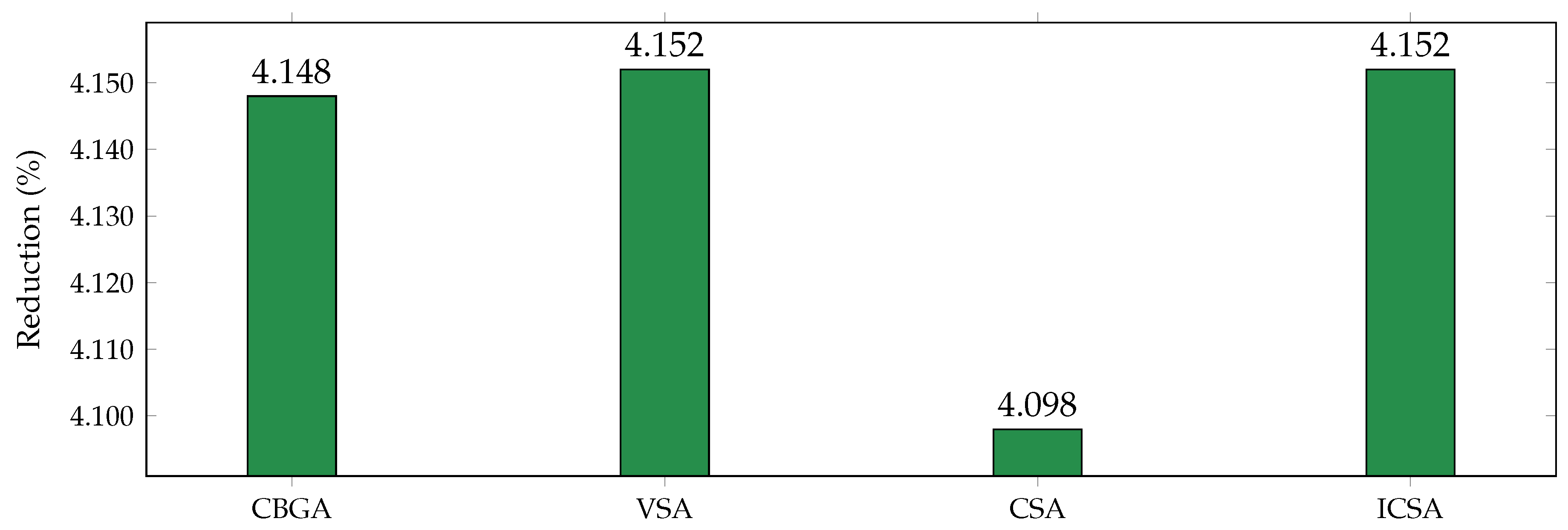
Figure 6 shows a comparison of the percentage reductions of the total active power losses of the different methods displayed in
Table 4, in contrast to the initial power losses. All methodologies allow a cutback of more than 4%. ICSA obtains a reduction of 4.15%, akin to the VSA reported in [
15].
5.3. Results for the 37-Node System
Table 5 shows the results obtained by the proposed ICSA for the 37-node test system, where the following is evident: (i) the solution obtained with the ICSA for the 37-node system improves the one reported in [
15] for the VSA, which indicates that the optimal solution for this system is 61.4781 kW; (ii) the solution obtained with the ICSA for the 37-node system outperforms the solution obtained with the CSA, which shows that the improvement made to the classical CSA explores and exploits the solution space for systems of large dimensions (i.e., 37-nodes) in a better way; and (iii) the standard deviation for the ICSA shown in
Table 5 is 0.1344 kW, which is lower than those reported in [
15] and the one obtained by the CSA. This affirms the repeatability properties of the ICSA for solving the phase swapping problem, considering the size of the solution space, i.e.,
.
Figure 7 portrays the variations of the phase power losses before and after the application of phase swapping with the ICSA, where the phase
b losses increase by 9.9184 kW. On the contrary, the phase power losses in
a and
c decrease by approximately 6.7771 kW and 17.7989 kW, respectively, offsetting the increase seen in the electrical phase
b power losses. Additionally, the phase power losses are close to the average total power losses of approximately 20.50 kW, with differences of less than 1.40 kW. These results indicate that phase swapping by ICSA is an effective way to redistribute the loads in the phases of the system as evenly as possible.
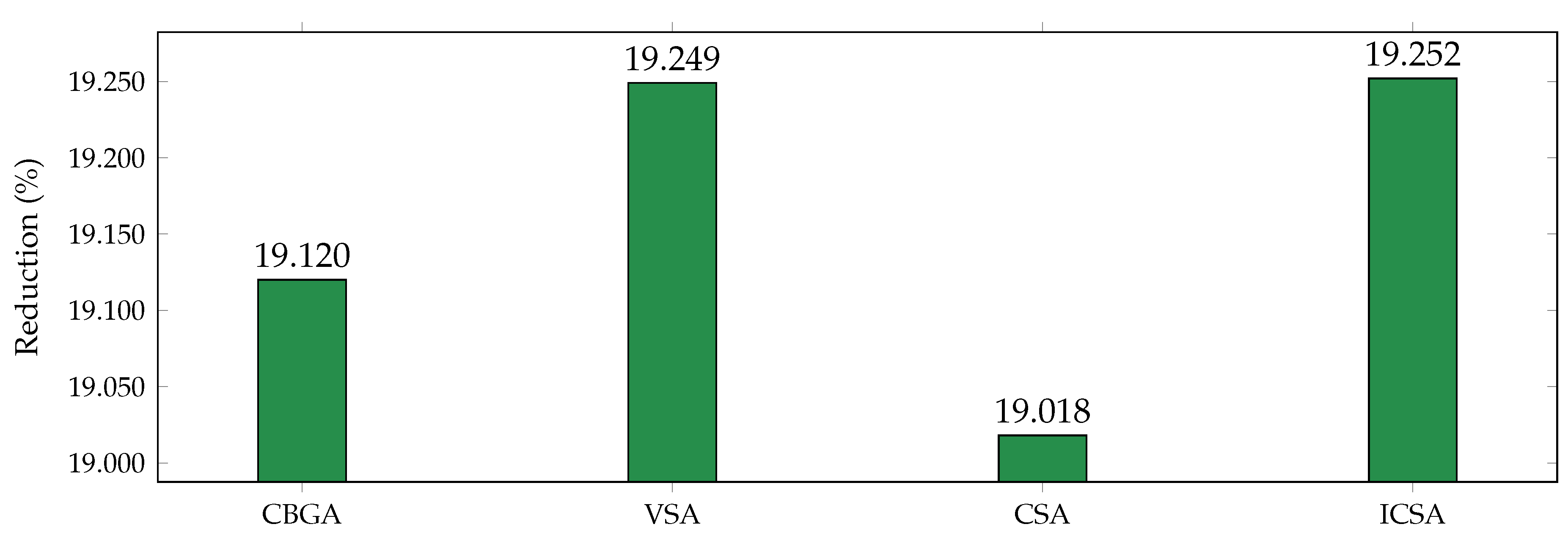
Figure 8 compares the reductions in the total active power losses percentage of the different methods presented in
Table 5 to the initial power losses. All methodologies allow a decrease of more than 19%, where ICSA obtains a reduction of 19.252%, a higher loss than VSA, as reported in [
15], which reported a decrease of 19.249%.
In
Figure 8, it is possible to observe that the proposed ICSA allows an additional improvement about 0.003% when compared to the power losses reduction with the VSA. This reduction implies a difference of 0.1784 kW in the total power losses minimization for the IEEE 37-bus system. Even if this power losses value corresponds to a small power losses reduction for this system, this demonstrates that the proposed ICSA finds an optimal solution for the IEEE 37-bus system, which supports the best current literature report obtained by [
15] with the VSA method. Thus, this new solution will serve as a reference point for future approaches that can be proposed to solve the phase swapping problem in ADSs.
5.4. Complementary Results
The following can be concluded from the results obtained in
Section 5.
- ✓
The optimal solution achieved with the enhanced version of the CSA for each test system is equal to the one reported in [
15] for the 8- and 25-node systems. However, it obtained a better solution for the 37-node system. Note that the obtained solutions (power losses) in this research are 10.5869 kW, 72.2888 kW, and 61.4781 kW for the 8-, 25-, and 37-node systems, respectively, while the best solutions reported in [
15] are 10.5869 kW, 72.2888 kW, and 61.4801 kW, respectively. It is relevant to highlight that the ICSA requires a longer processing time. Nevertheless, these times do not exceed 6 minutes, which is not significant considering the terms for optimization problems with solution spaces with hundreds of thousands of combinations. It ensures excellent quality solutions and even better ones than the values reported in the literature review in some cases (see results for the 37-node system). However, simulations in tests feeders with large number of nodes will be required to ensure that, in all of the cases, the processing times spent by the proposed ICSA will be compensated with optimal solutions better than the solutions provided by the VSA.
- ✓
The standard deviations reported in
Table 3,
Table 4 and
Table 5 for the 8-, 25-, and 37-node systems, respectively, for ICSA are lower than those reported in [
15]. In addition, a standard deviation of 0.1344 kW for the 37-node test system demonstrates the repeatability properties of the ICSA for solving the phasing problem, considering that the dimensions of the solution space are higher than
. Regarding metaheuristic optimization methods, the main preoccupation in the literature is associated with the ability of these methods to find the same optimal solution at each simulation. However, this is not possible due to the random nature of the exploration and exploitation criteria inside of each metaheuristic optimizer. Nevertheless, when an optimization methodology exhibits low standard deviations, all the solutions are contained inside of a small hyper-sphere close to the global optimum. This improves the optimization method of the proposed ICSA when compared with a family of metaheuristic optimizers.
- ✓
When comparing the base cases of each test system with the proposed methodologies, as shown in
Table 3 and
Figure 5 and
Figure 7, the reductions in energy losses resulting from ICSA in the 8, 25, and 37-node systems are 24.34%, 4.152%, and 19.252%, respectively. The results show that better results are obtained when applying the proposed methodology for the 37-node system, in contrast to the CSA and the VSA [
15]. Likewise, it is observed that the proposed enhancement for the CSA effectively explores and exploits the solution space for large systems higher than 25 nodes in the case of distribution power systems.
- ✓
The comparison of the effect in the energy losses redistribution at each phase using the classic and improved CSA methods is presented in
Table 6.
With these results, we can make several observations. (i) In the 8-bus system, the phase c presents power losses higher than 4 kW, while the ICSA does not support this value; however, both solutions are indeed optimal since the total power losses is the same for both methods. (ii) In the 25-bus system both methods, i.e., the CSA and its improved version, the phase c has been identified to present higher power losses surpassing 26 kW; however, regarding the final power losses, the ICSA presents better load redistribution, since the amount of power losses is about 0.0408 kW. Finally, (iii) in the 37-bus system, the CSA method presents a difference between phases a and b power losses of kW, while the proposed ICSA has a minor difference between both phases with a value of kW. This directly impacts the final grid results with a general improvement of about kW in favor of the proposed ICSA, which is indeed the best global optimum reported in the current literature for the IEEE 37-bus system.
6. Conclusions and Future Works
This paper presented a master–slave methodology to solve the phase equilibrium problem in ADSs. For this purpose, an ICSA was proposed using the VSA evolution mechanism. The master stage determined the set of phase configurations for the system three-phase charges through the ICSA, using an integer encoding between 1 and 6 representing the load connections in the three-phase system. On the other hand, the slave stage evaluated each of the load connections in the TPPF, which correspond to the extended version of the iterative sweep power flow method for unbalanced three-phase systems.
The numerical results on the 8-, 25-, and 37-node test systems showed that the proposed ICSA, compared to the VSA, achieves identical solutions for the 8-node and 25-node systems. However, for the 37-node system, the ISCA obtains a better optimal solution when compared with the current report employing the VSA method. The solutions obtained by the ICSA are 10.5869 kW, 72.2888 kW, and 61.4781 kW for the 8-, 25-, and 37-node systems, representing a reduction of 24.34%, 4.152%, and 19.252%, respectively. In the same way, the solutions for the VSA are 10.5869 kW, 72.2888 kW, and 61.4801 kW, respectively.
In addition, the proposed methodology has minor standard deviations for solving the phase swapping problem for the 8-, 25-, and IEEE 37-node test systems, which were kW, 0.0116 kW, and 0.1344 kW, respectively. This demonstrates better repeatability properties of the improved algorithm, since all the solutions are contained inside small hyper-spheres around the global optimum. Further, the solution space for the phase equilibrium problem potentially increases as a function of the demand nodes. Thus, for the IEEE 37-node system, there is a solution space bigger than , which is by far higher than 100 billion combinations. This result confirmed the effectiveness of the proposed methodology for solving complex MINLP models such as the phase equilibrium problem in ADSs as well as in being better than the optimal solution reported in the current literature using the VSA.
In future work, it is possible to accomplish the following: (i) combine the proposed phase swapping with the optimal placement of distributed generators to reduce power losses in ADSs; (ii) employ typical active and reactive power demand curves to solve the phase swapping problem using the ICSA to reduce power losses; and (iii) use the ICSA to solve the optimal reconfiguration problem in three-phase radial distribution networks.


 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}