
First Demonstration of Recognition of Manganese Crust by Deep-Learning Networks with a Parametric Acoustic Probe

 ,
,
Abstract
:1. Introduction
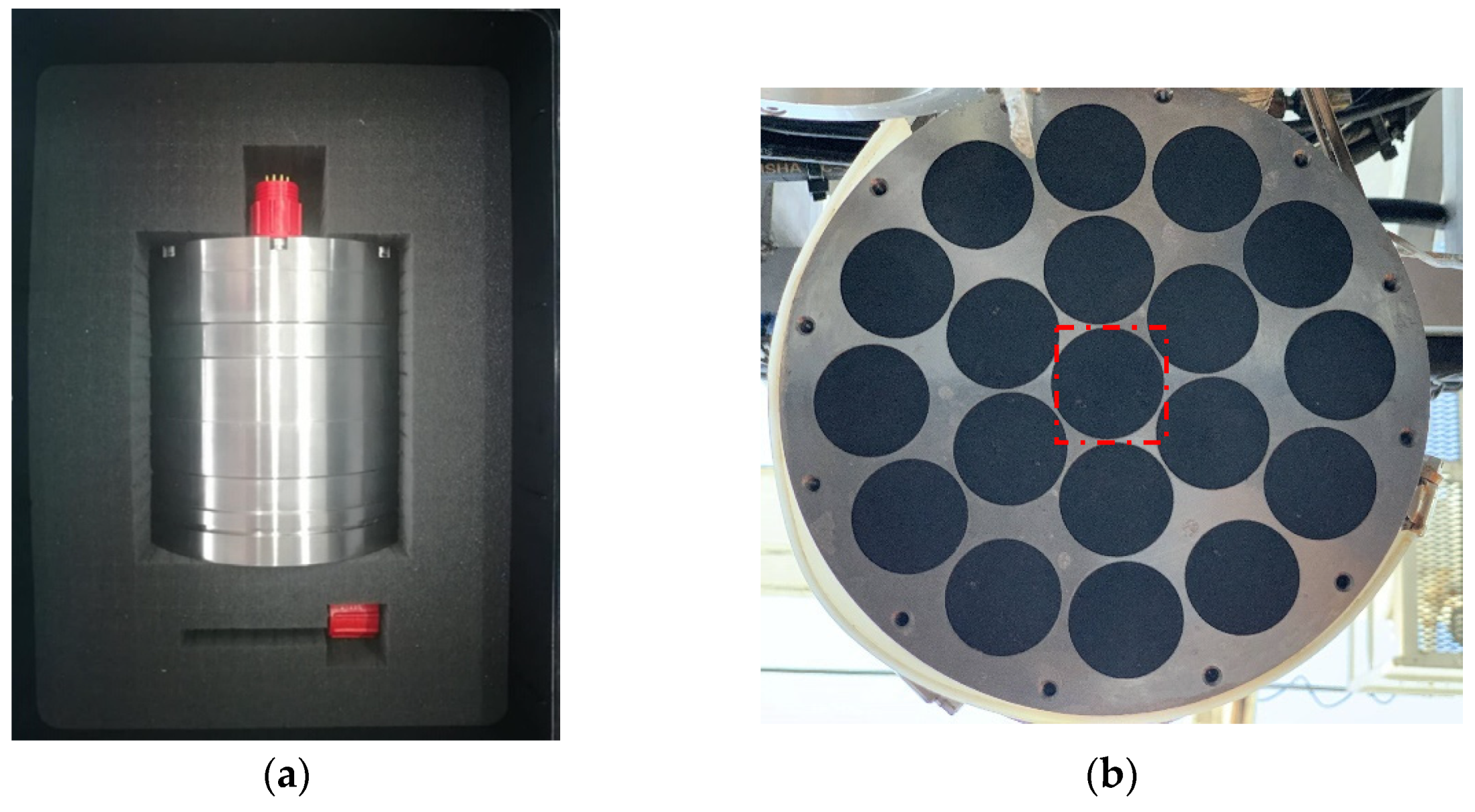
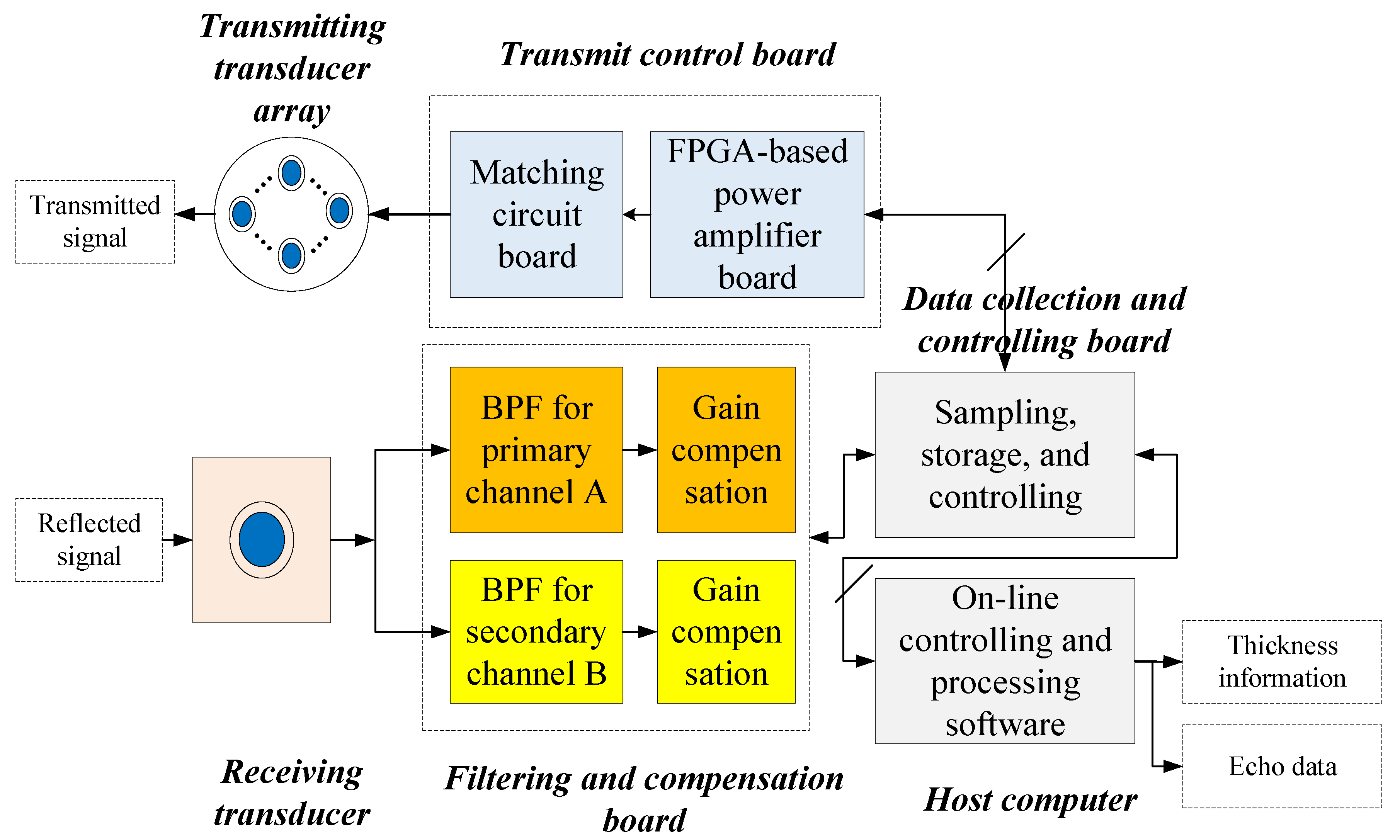
2. System Description
3. Binary Classification with Different Approaches
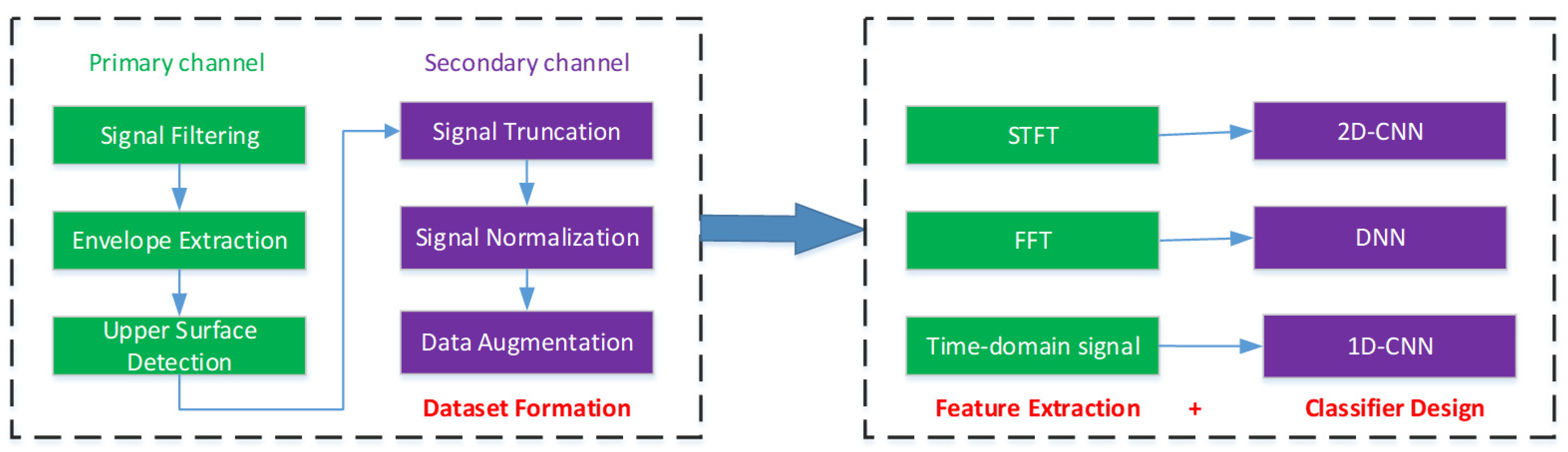
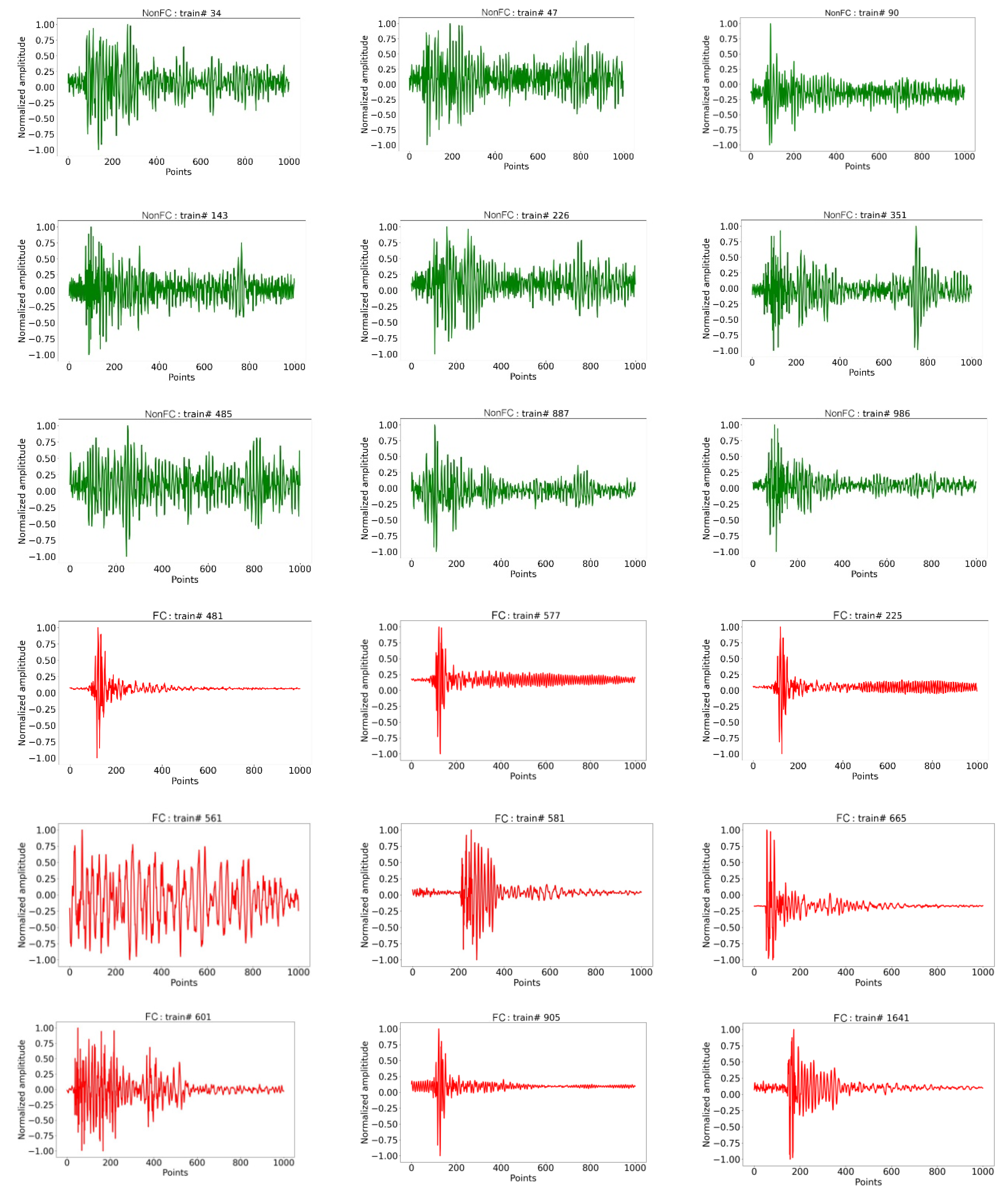
3.1. Dataset Formation
3.2. Description of Different Methods
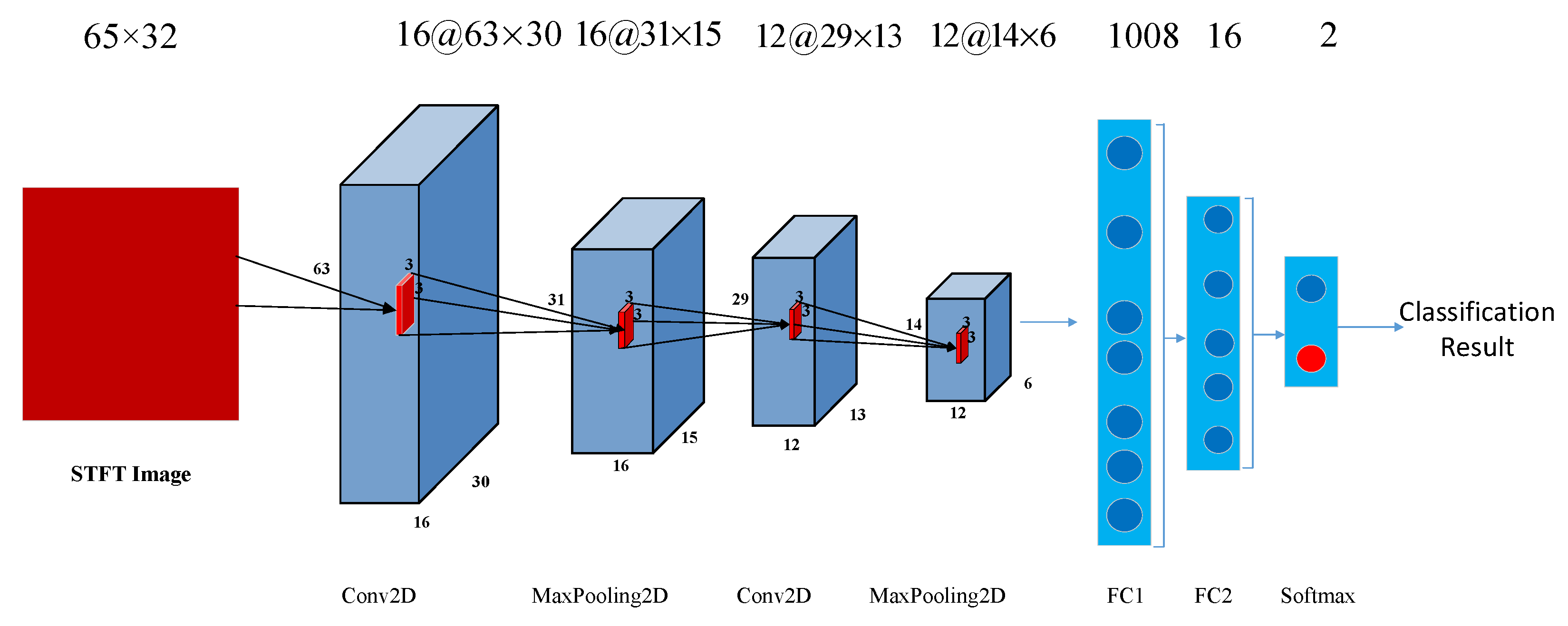
3.2.1. STFT+2D-CNN
- Stage 0: The input layer is an STFT image with a size of 65 × 32.
- Stage 1: The first stage consists of a convolutional layer of 16 filters with the rectangular shape of 3 × 3 and a stride of 1 × 1. We use a Rectified Linear Unit (ReLU) as the activation function and max pooling of 2 × 2 and a stride of 2 × 2.
- Stage 2: The second stage uses a convolutional layer of 12 filters with the rectangular shape of 3 × 3 and stride of 1 × 1. It is paddled with the method of valid paddling. We use a ReLU as the activation function. The max pooling of 2 × 2 and a stride of 2 × 2 is used. The dropout strategy with 0.5 is used in this layer.
- Stage 3: The stage contains the flatten layer with the number of hidden units of the first fully connected layer of 1008, followed by the connected layer with 16 hidden units and the dropout with 0.5. The binary output layer uses the cost function of softmax.
- Stage 4: This stage contains the flatten layer with 576 hidden units in the first fully connected layer, followed by the connected layer with 64 hidden units and the dropout with 0.5. The binary output layer uses the cost function of softmax.
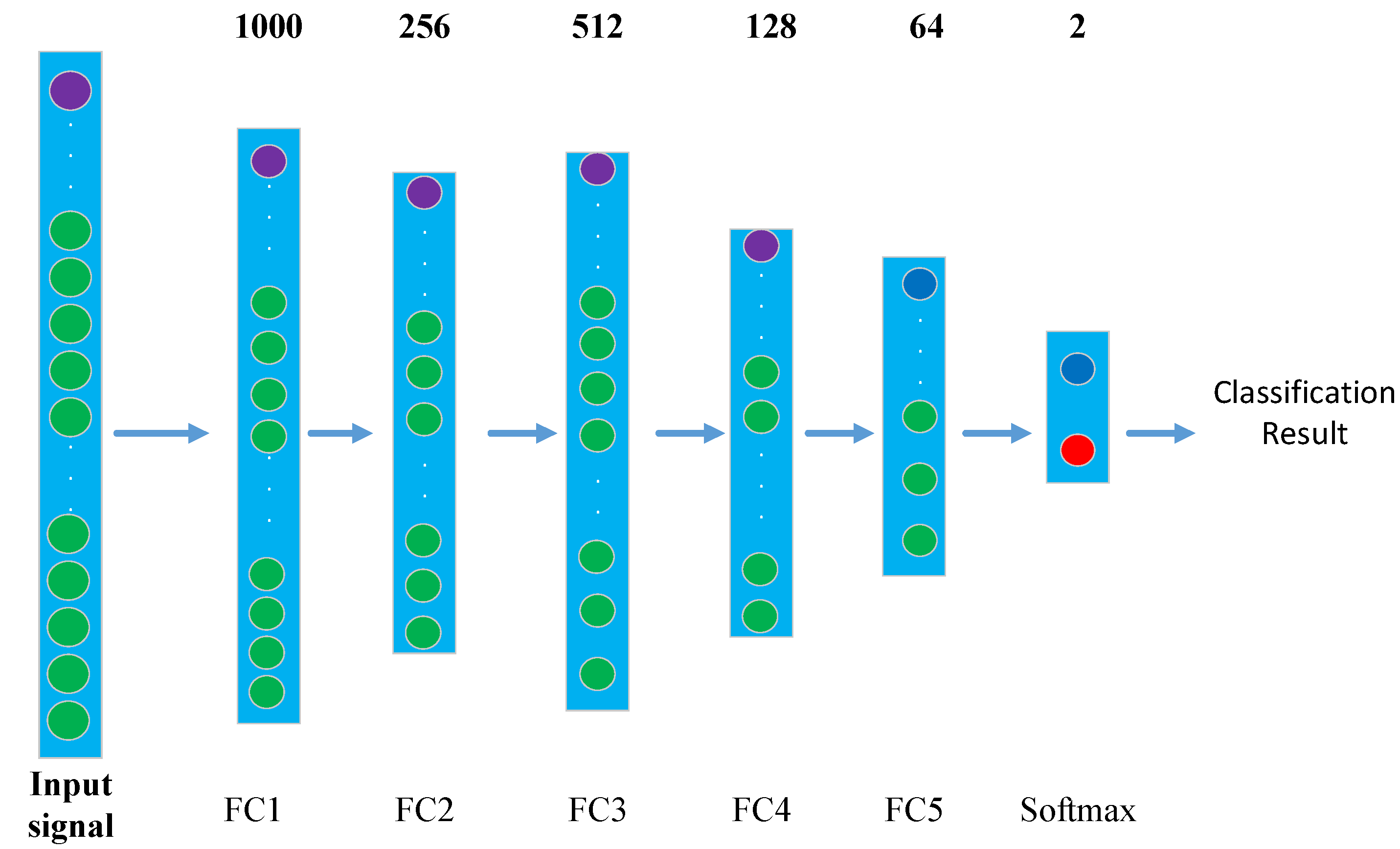
3.2.2. FFT+DNN
3.2.3. Time-Domain Signal+1D-CNN
- Stage 0: The input layer uses the time-domain signal with the size of 1000 as the input.
- Stage 1: The first stage consists of a convolutional layer of 16 filters with a rectangular shape of 64 and a stride of 2. We use a Rectified Linear Unit (ReLU) as the activation function and max pooling of 2 and a stride of 2.
- Stage 2: The second stage consists of a convolutional layer of 32 filters with a rectangular shape of 32 and a stride of 2. We use a ReLU as the activation function and max pooling of 2 and a stride of 2.
- Stage 3: This stage consists of a convolutional layer of 64 filters with a rectangular shape of 16 and a stride of 2. We use a ReLU as the activation function and max pooling of 2 and a stride of 2.
- Stage 4: This stage contains the flatten layer with 576 hidden units in the first fully connected layer, followed by the connected layer with 64 hidden units and dropout with 0.5. The binary output layer uses the cost function of softmax.
4. Experimental Configurations and Results
4.1. Experimental Configuration and Dataset Description
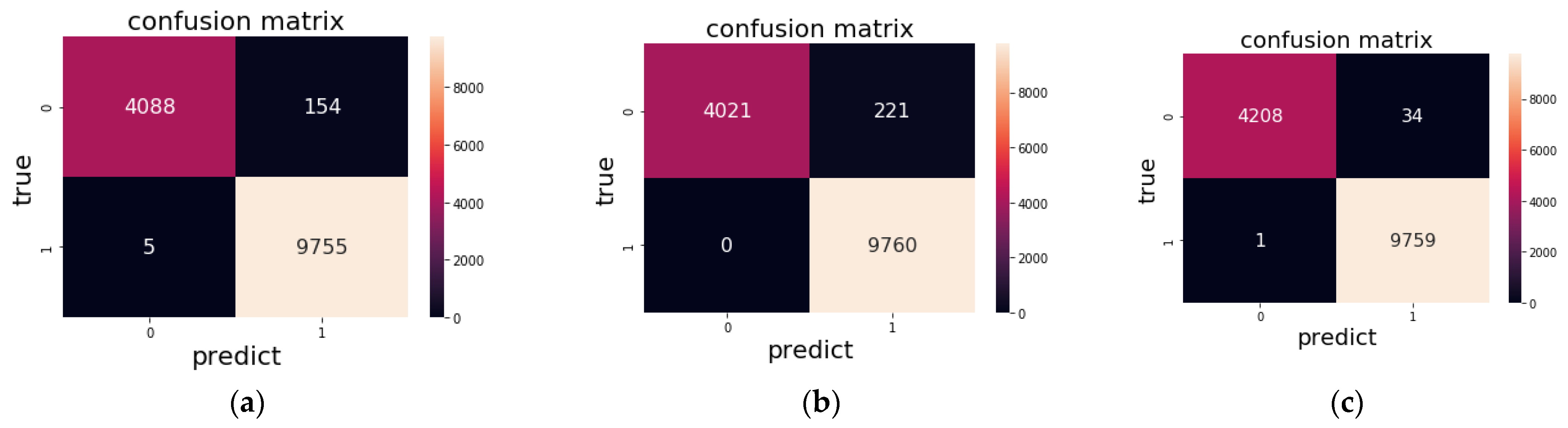
4.2. Result and Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hein, J.R.; Koschinsky, A.; Bau, M.; Manheim, F.T.; Kang, J.; Roberts, L. Cobalt-rich ferromanganese crusts in the Pacific. Handb. Mar. Miner. Depos. 2000, 18, 239–273. [Google Scholar]
- Clark, M.R.; Heydon, R.; Hein, J.R.; Petersen, S.; Rowden, A.; Smith, S.; Baker, E.; Beaudoin, Y. Deep Sea Minerals: Cobalt-Rich Ferromanganese Crusts, A Physical, Biological, Environmental, and Review; Baker, E., Beaudoin, Y., Eds.; Secretariat of the Pacific Community: Noumea, France, 2013. [Google Scholar]
- Usui, A.; Nishi, K.; Sato, H.; Nakasato, Y.; Thornton, B.; Kashiwabara, T.; Tokumaru, A.; Sakaguchi, A.; Yamaoka, K.; Kato, S.; et al. Continuous growth of hydrogenetic ferromanganese crusts since 17 Myr ago on Takuyo-Daigo Seamount, NW Pacific, at water depths of 800–5500 m. Ore Geol. Rev. 2017, 87, 71–87. [Google Scholar] [CrossRef] [Green Version]
- Usui, A.; Graham, I.J.; Ditchburn, R.G.; Zondervan, A.; Shibasaki, H.; Hishida, H. Growth history and formation environments of ferromanganese deposits on the Philippine Sea Plate, northwest Pacific Ocean. Island Arc 2007, 16, 420–430. [Google Scholar] [CrossRef]
- Yang, Y.; He, G.; Ma, J.; Yu, Z.; Yao, H.; Deng, X.; Liu, F.; Wei, Z. Acoustic quantitative analysis of ferromanganese nodules and cobalt-rich crusts distribution areas using EM122 multibeam backscatter data from deep-sea basin to seamount in Western Pacific Ocean. Deep. Sea Res. Part I Oceanogr. Res. Pap. 2020, 161, 103281. [Google Scholar] [CrossRef]
- Hong, F.; Feng, H.; Huang, M.; Wang, B.; Xia, J. China’s First Demonstration of Cobalt-rich Manganese Crust Thickness Measurement in the Western Pacific with a Parametric Acoustic Probe. Sensors 2019, 19, 4300. [Google Scholar] [CrossRef] [Green Version]
- Du, D.; Ren, X.; Yan, S.; Shi, X.; Liu, Y.; He, G. An integrated method for the quantitative evaluation of mineral resources of cobalt-rich crusts on seamounts. Ore Geol. Rev. 2017, 84, 174–184. [Google Scholar] [CrossRef]
- Neettiyath, U.; Thornton, B.; Sangekar, M.; Nishida, Y.; Ishii, K.; Bodenmann, A.; Sato, T.; Ura, T.; Asada, A. Deep-Sea Robotic Survey and Data Processing Methods for Regional-Scale Estimation of Manganese Crust Distribution. IEEE J. Ocean. Eng. 2020, 46, 102–114. [Google Scholar] [CrossRef]
- Neto, A.A.; Da Costa, V.A.; Porto, C.P.F.M.; Garrido, T.C.V.; Hermand, J.-P. Relationship between geoacoustic properties and chemical content of submarine polymetallic crusts from offshore Brazil. Mar. Georesources Geotechnol. 2019, 38, 437–449. [Google Scholar] [CrossRef]
- Anderson, J.T.; Holliday, V.; Kloser, R.; Reid, D.; Simard, Y. Acoustic seabed classification of marine physical and biological landscapes. ICES Coop. Res. Rep. 2007, 286. Available online: https://www.researchgate.net/profile/Andrzej-Orlowski/publication/263887329_Acoustic_seabed_classification_of_marine_physical_and_biological_landscapes/links/55c3579808aeca747d5e1b39/Acoustic-seabed-classification-of-marine-physical-and-biological-landscapes.pdf (accessed on 6 October 2021).
- Michaels, W.L. Review of acoustic seabed classification systems. In Acoustic Seabed Classification of Marine Physical and Biological Landscapes; Anderson, J.T., Holliday, D.V., Kloser, R., Reid, D.G., Simard, Y., Eds.; ICES: Copenhagen, Denmark, 2007; Volume 286, pp. 94–115. Available online: https://www.researchgate.net/publication/280741003 (accessed on 6 October 2021).
- Kloser, R. Seabed backscatter, data collection and quality overview. In Acoustic Seabed Classification of Marine Physical and Biological Landscapes; ICES Cooperative Research Report; Anderson, J.T., Ed.; ICES Cooperative: Copenhagen, Denmark, 2007; Volume 286, pp. 45–60. Available online: https://www.vliz.be/en/imis?module=ref&refid=114460 (accessed on 6 October 2021).
- Machida, S.; Fujinaga, K.; Ishii, T.; Nakamura, K.; Hirano, N.; Kato, Y. Geology and geochemistry of ferromanganese nodules in the Japanese Exclusive Economic Zone around Minamitorishima Island. Geochem. J. 2016, 50, 539–555. [Google Scholar] [CrossRef] [Green Version]
- Usui, A.; Okamoto, N. Geophysical and geological exploration of cobalt-rich ferromanganese crusts: An attempt of small-scale mapping on a Micronesian seamount. Mar. Georesour. Geotechnol. 2010, 28, 192–206. [Google Scholar] [CrossRef]
- Nakamura, K.; Machida, S.; Okino, K.; Masaki, Y.; Iijima, K.; Suzuki, K.; Kato, Y. Acoustic characterization of pelagic sediments using sub-bottom profiler data: Implications for the distribution of REY-rich mud in the Minamitorishima EEZ, western Pacific. Geochem. J. 2016, 50, 605–619. [Google Scholar] [CrossRef] [Green Version]
- Machida, S.; Sato, T.; Yasukawa, K.; Masaki, Y.; Iijima, K.; Suzuki, K.; Kato, Y. Visualisation method for the broad distribution of seafloor ferromanganese deposits. Mar. Georesour. Geotechnol. 2021, 39, 267–279. [Google Scholar] [CrossRef] [Green Version]
- Berthold, T.; Leichter, A.; Rosenhahn, B.; Berkhahn, V.; Valerius, J. Seabed sediment classification of side-scan sonar data using convolutional neural networks. In Proceedings of the 2017 IEEE Symposium Series on Computational Intelligence (SSCI) 2017, Honolulu, HI, USA, 27 November–1 December 2017. [Google Scholar]
- Ma, J.; Li, H.; Zhu, J.; Chen, B. Sound Velocity Estimation of Seabed Sediment Based on Parametric Array Sonar. Math. Probl. Eng. 2020, 2020, 9810215. [Google Scholar] [CrossRef]
- Weydert, M.M.P. Measurements of the acoustic backscatter of manganese nodules. J. Acoust. Soc. Am. 1985, 78, 2115–2121. [Google Scholar] [CrossRef]
- Weydert, M.M.P. Measurements of the acoustic backscatter of selected areas of the deep seafloor and some implications for the assessment of manganese nodule resources. J. Acoust. Soc. Am. 1990, 88, 350–366. [Google Scholar] [CrossRef]
- Hein, J.R.; Mizell, K.; Koschinsky, A.; Conrad, T.A. Deep-ocean mineral deposits as a source of critical metals for high-and green-technology applications: Comparison with land-based resources. Ore Geol. Rev. 2013, 51, 1–14. [Google Scholar] [CrossRef]
- Lusty, P.A.J.; Murton, B.J. Deep-ocean mineral deposits: Metal resources and windows into earth processes. Elements 2018, 14, 301–306. [Google Scholar] [CrossRef] [Green Version]
- Moustier, C. Inference of manganese nodule coverage from Sea Beam acoustic backscattering data. Geophysics 1985, 50, 989–1001. [Google Scholar] [CrossRef]
- Chakraborty, B.; Kodagali, V.; Baracho, J. Sea-floor classification using multibeam echo-sounding angular backscatter data: A real-time approach employing hybrid neural network architecture. IEEE J. Ocean. Eng. 2003, 28, 121–128. [Google Scholar] [CrossRef]
- Weydert, M. Design of a system to assess manganese nodule resources acoustically. Ultrasonics 1991, 29, 150–158. [Google Scholar] [CrossRef]
- Choening, T.; Jones, D.O.B.; Greinert, J. Compact-morphology-based polymetallic nodule delineation. Sci. Rep. 2017, 7, 13338–13349. [Google Scholar] [CrossRef] [PubMed]
- Hari, V.N.; Kalyan, B.; Chitre, M.; Ganesan, V. Spatial modeling of deep-sea ferromanganese nodules with limited data using neural networks. IEEE J. Ocean. Eng. 2017, 43, 997–1014. [Google Scholar] [CrossRef]
- Wang, B.; Hong, F.; Feng, H.; Huang, M.; Xia, J.; Liu, C. Evaluation of the recognition of Cobalt-Rich Manganese Crusts based on Deep Learning Networks with physical phantoms. In Global Oceans 2020, Singapore-U.S. Gulf Coast; IEEE: New York, NY, USA, 2020; pp. 1–5. [Google Scholar]
- Thornton, B.; Asada, A.; Bodenmann, A.; Sangekar, M.; Ura, T. Instruments and methods for acoustic and visual survey of manganese crusts. IEEE J. Ocean. Eng. 2012, 38, 186–203. [Google Scholar] [CrossRef]
- Neettiyath, U.; Sato, T.; Sangekar, M.; Bodenmann, A.; Thornton, B.; Ura, T.; Asada, A. identification of manganese crusts in 3D visual reconstructions to filter geo-registered acoustic sub-surface measurements. In OCEANS 2015-MTS/IEEE Washington; IEEE: New York, NY, USA, 2015; pp. 1–6. [Google Scholar]
- Hong, F.; Liu, C.; Guo, L.; Chen, F.; Feng, H. Underwater Acoustic Target Recognition with a Residual Network and the Optimized Feature Extraction Method. Appl. Sci. 2021, 11, 1442. [Google Scholar] [CrossRef]
- Ji, X.; Yang, B.; Tang, Q. Seabed sediment classification using multibeam backscatter data based on the selecting optimal random forest model. Appl. Acoust. 2020, 167, 107387. [Google Scholar] [CrossRef]
- Neilsen, T.B.; Escobar-Amado, C.D.; Acree, M.C.; Hodgkiss, W.S.; van Komen, D.F.; Knobles, D.P.; Badiey, M.; Castro-Correa, J. Learning location and seabed type from a moving mid-frequency source. J. Acoust. Soc. Am. 2021, 149, 692. [Google Scholar] [CrossRef]
- Miller, K.A.; Thompson, K.F.; Johnston, P.; Santillo, D. An overview of seabed mining including the current state of development, environmental impacts, and knowledge gaps. Front. Mar. Sci. 2018, 4, 418. [Google Scholar] [CrossRef]
- Zhua, Z.; Cui, X.; Zhang, K.; Ai, B.; Shi, B.; Yang, F. DNN-based seabed classification using differently weighted MBES multi features. Mar. Geol. 2021, 438, 106519. [Google Scholar] [CrossRef]
- Abdoli, S.; Cardinal, P.; Koerich, A. End-to-end environmental sound classification using a 1D convolutional neural network. Expert Syst. Appl. 2019, 136, 252–263. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Centroid frequency of the primary channel | 1 MHz | |
| The bandwidth of the primary channel | 200 kHz | |
| The sampling frequency of the primary channel | 5 MHz | |
| The sampling frequency of the secondary channel | 2 MHz | |
| Lower/Higher cut-off frequency of BPF of the secondary channel | 100 kHz/380 kHz | |
| Lower/Higher cut-off frequency of BPF of the primary channel | 900 kHz/1100 kHz |
| Original | # FC | # NonFC | # Total | Percent |
|---|---|---|---|---|
| Train/ | 18,120 | 9544 | 27,664 | 75% (Train/val = 3:1) |
| Val | 6040 | 3182 | 9222 | |
| Test | 9760 | 4242 | 14,002 | 25% |
| Total | 33,920 | 16,968 | 50,888 | 100% |
| Method | Type | Precision | Recall | F1-Score | Support |
|---|---|---|---|---|---|
| STFT+2D-CNN (18,078) | FC | 0.985 | 0.999 | 0.992 | 9760 |
| NonFC | 0.998 | 0.966 | 0.982 | 4242 | |
| weighted avg | 0.989 | 0.989 | 0.989 | 14,002 | |
| Precision | Recall | F1-Score | Support | ||
| FFT+DNN (461,890) | FC | 0.978 | 1.000 | 0.989 | 9760 |
| NonFC | 1.000 | 0.948 | 0.973 | 4242 | |
| weighted avg | 0.984 | 0.984 | 0.984 | 14,002 | |
| Precision | Recall | F1-Score | Support | ||
| Time-domain + 1D-CNN (87,346) | FC | 0.997 | 0.999 | 0.998 | 9760 |
| NonFC | 0.999 | 0.992 | 0.996 | 4242 | |
| weighted avg | 0.998 | 0.998 | 0.997 | 14,002 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, F.; Huang, M.; Feng, H.; Liu, C.; Yang, Y.; Hu, B.; Li, D.; Fu, W. First Demonstration of Recognition of Manganese Crust by Deep-Learning Networks with a Parametric Acoustic Probe. Minerals 2022, 12, 249. https://0-doi-org.brum.beds.ac.uk/10.3390/min12020249
Hong F, Huang M, Feng H, Liu C, Yang Y, Hu B, Li D, Fu W. First Demonstration of Recognition of Manganese Crust by Deep-Learning Networks with a Parametric Acoustic Probe. Minerals. 2022; 12(2):249. https://0-doi-org.brum.beds.ac.uk/10.3390/min12020249
Chicago/Turabian StyleHong, Feng, Minyan Huang, Haihong Feng, Chengwei Liu, Yong Yang, Bo Hu, Dewei Li, and Wentao Fu. 2022. "First Demonstration of Recognition of Manganese Crust by Deep-Learning Networks with a Parametric Acoustic Probe" Minerals 12, no. 2: 249. https://0-doi-org.brum.beds.ac.uk/10.3390/min12020249