
Spectral Angle Mapping and AI Methods Applied in Automatic Identification of Placer Deposit Magnetite Using Multispectral Camera Mounted on UAV †

 , , , and
, , , and
Abstract
:1. Introduction
The Study Area
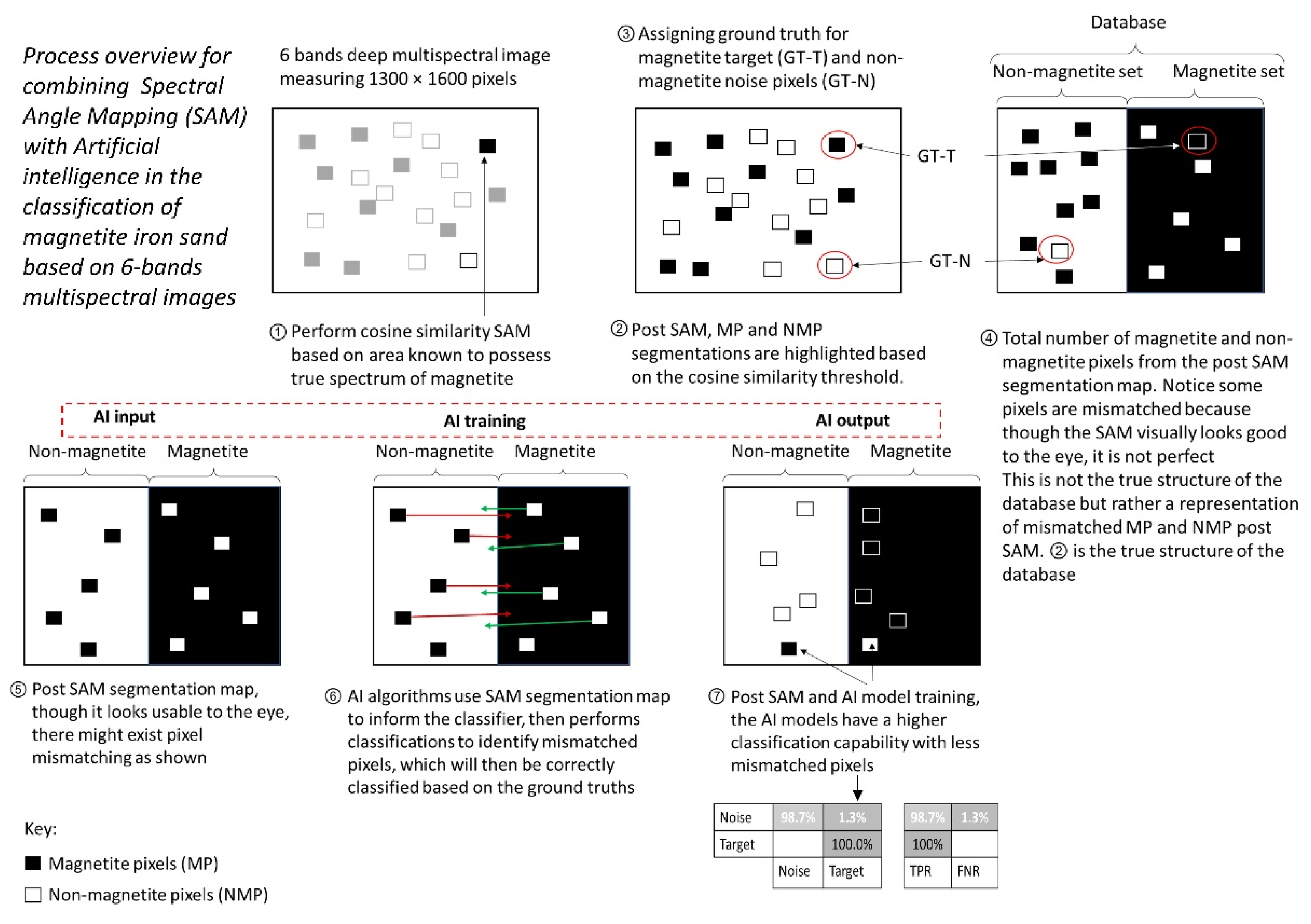
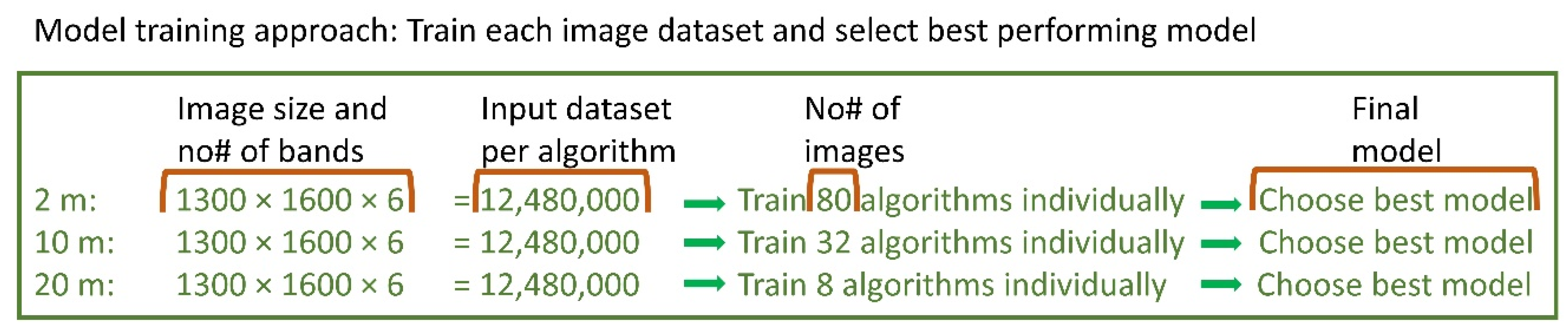
2. Methodological Strategies for SAM and AI Integration
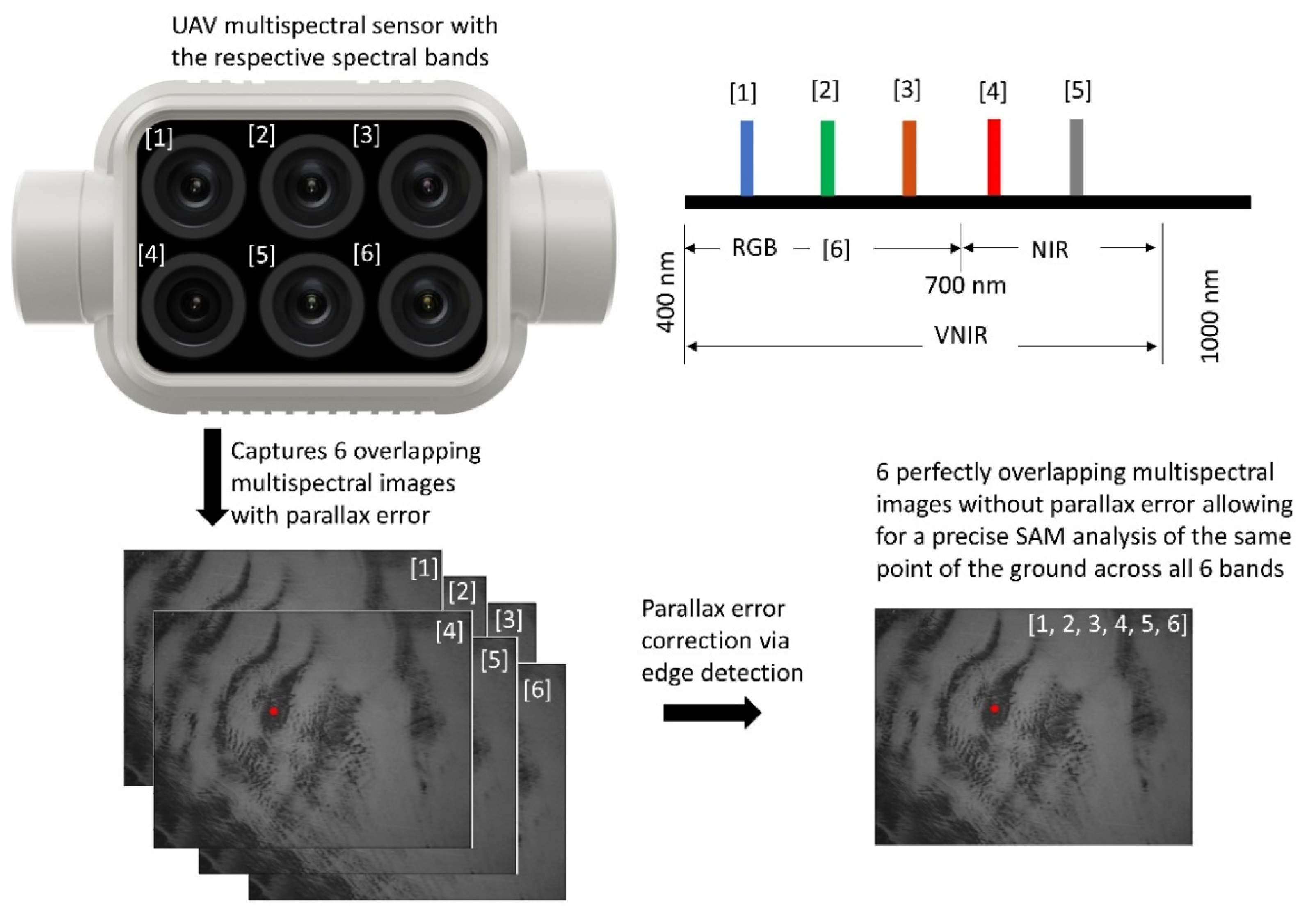
2.1. Combination of UAV Drone Technology with Multispectral Imaging
2.2. Parallax Error Correction
2.3. A Scrutiny of SAM Analysis
2.4. Benefits of Employing AI Methods in Magnetite Identification
2.4.1. How Machine Learning Algorithms Operate
2.4.2. How Deep Learning Algorithms Operate
3. Experimental and Analytical Results
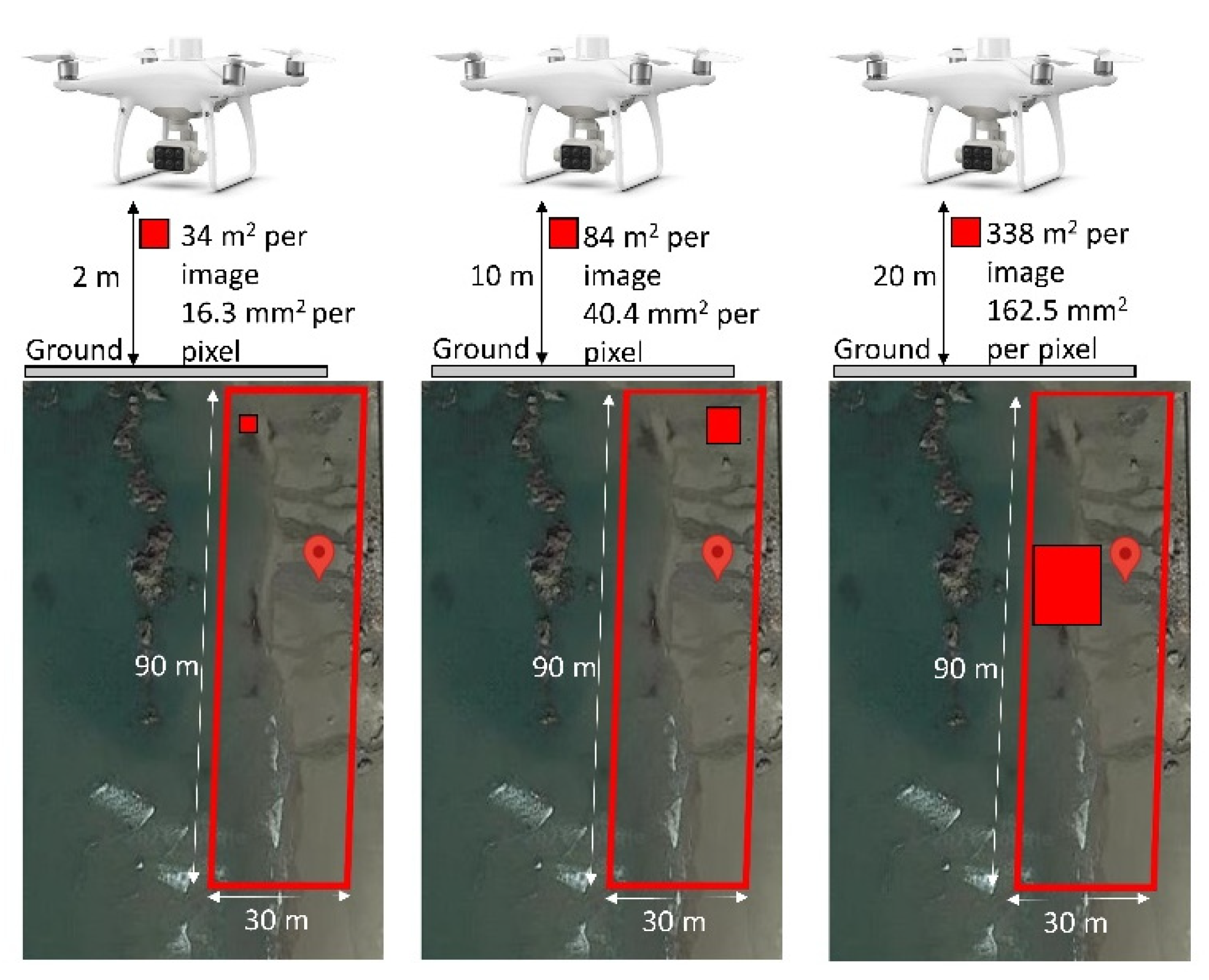
3.1. UAV Drone Field Analytics
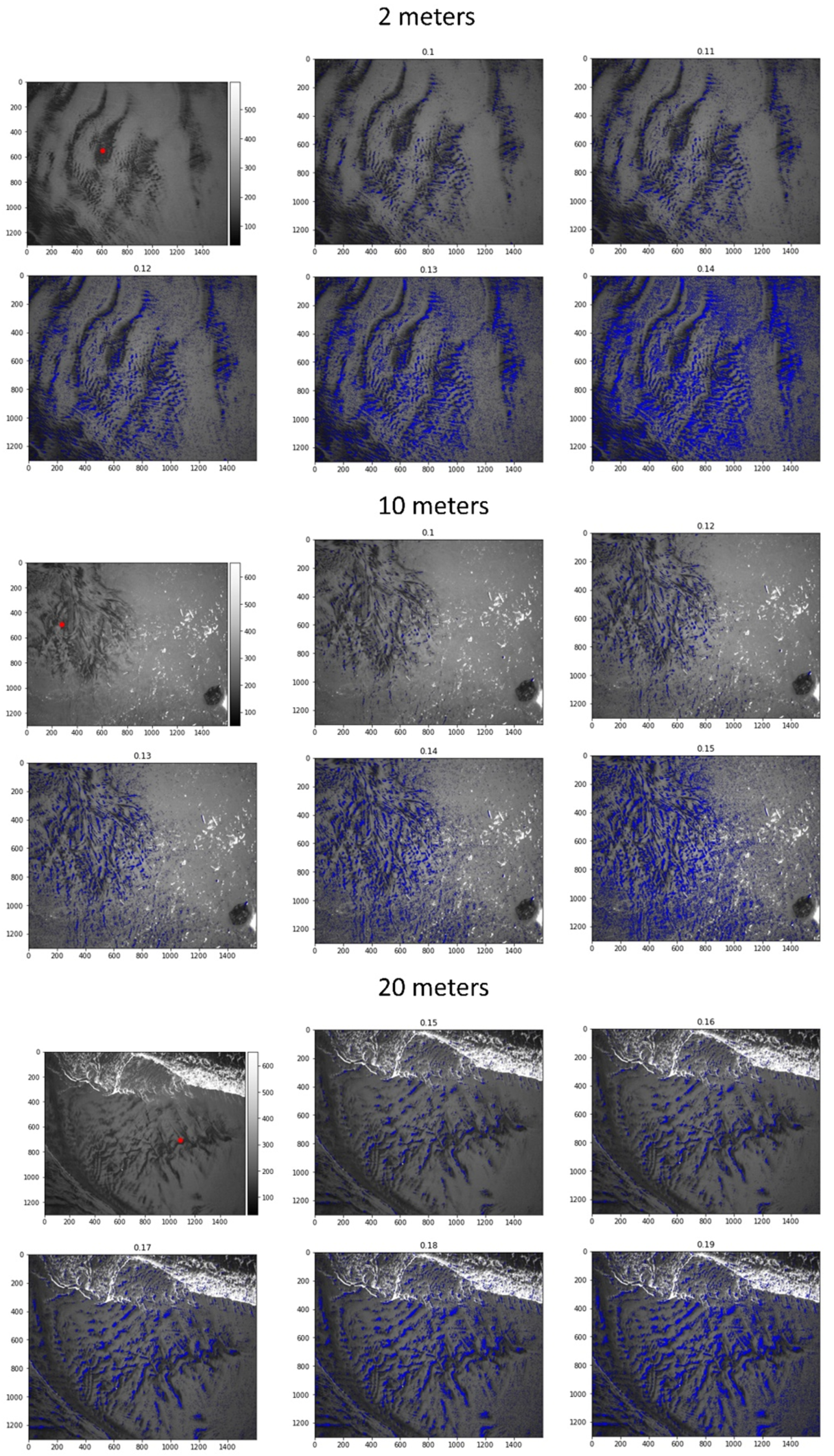
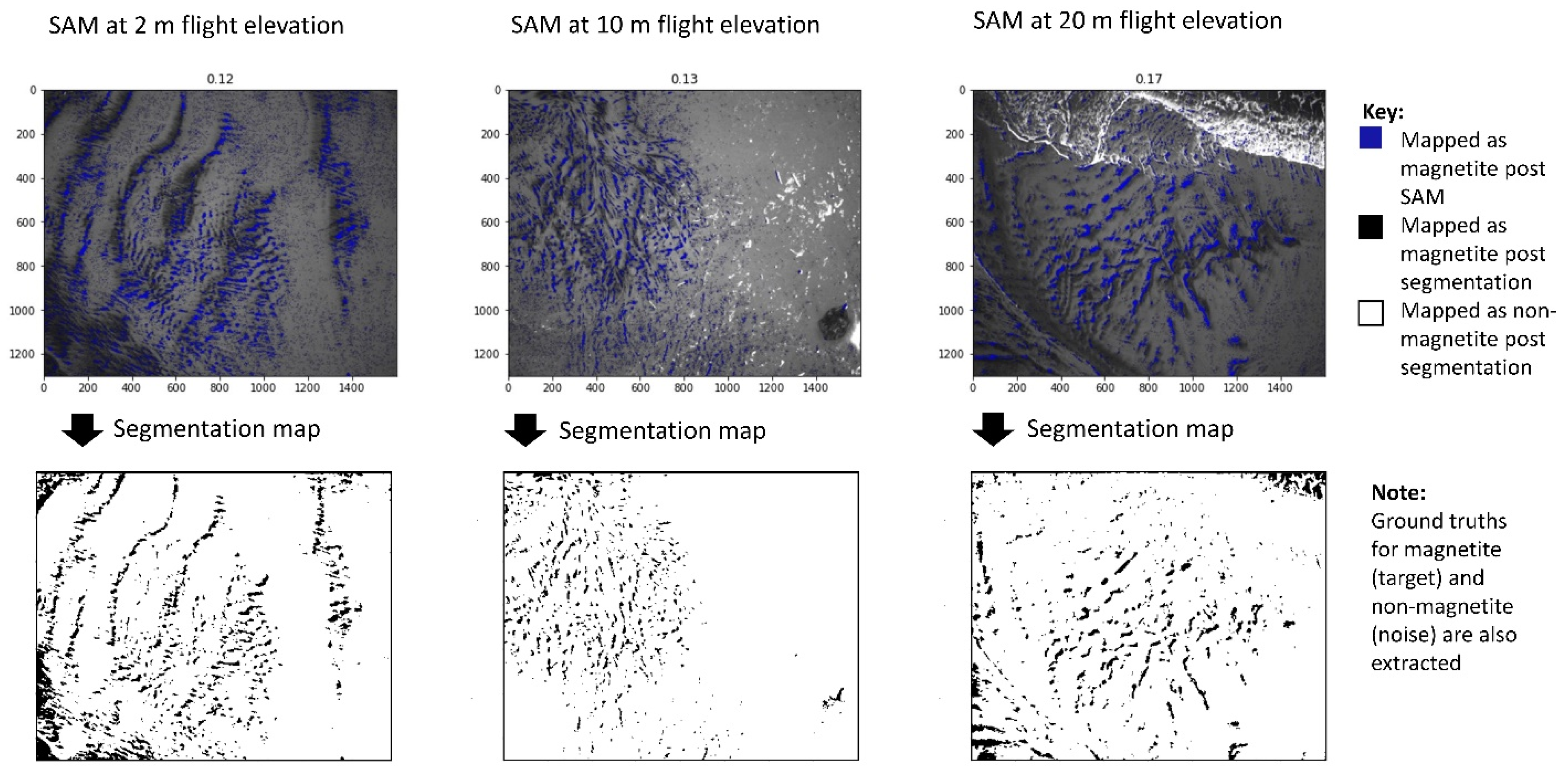
3.2. SAM Analysis Outputs
3.3. Application of AI Methods in Magnetite Spectral Classification Post SAM
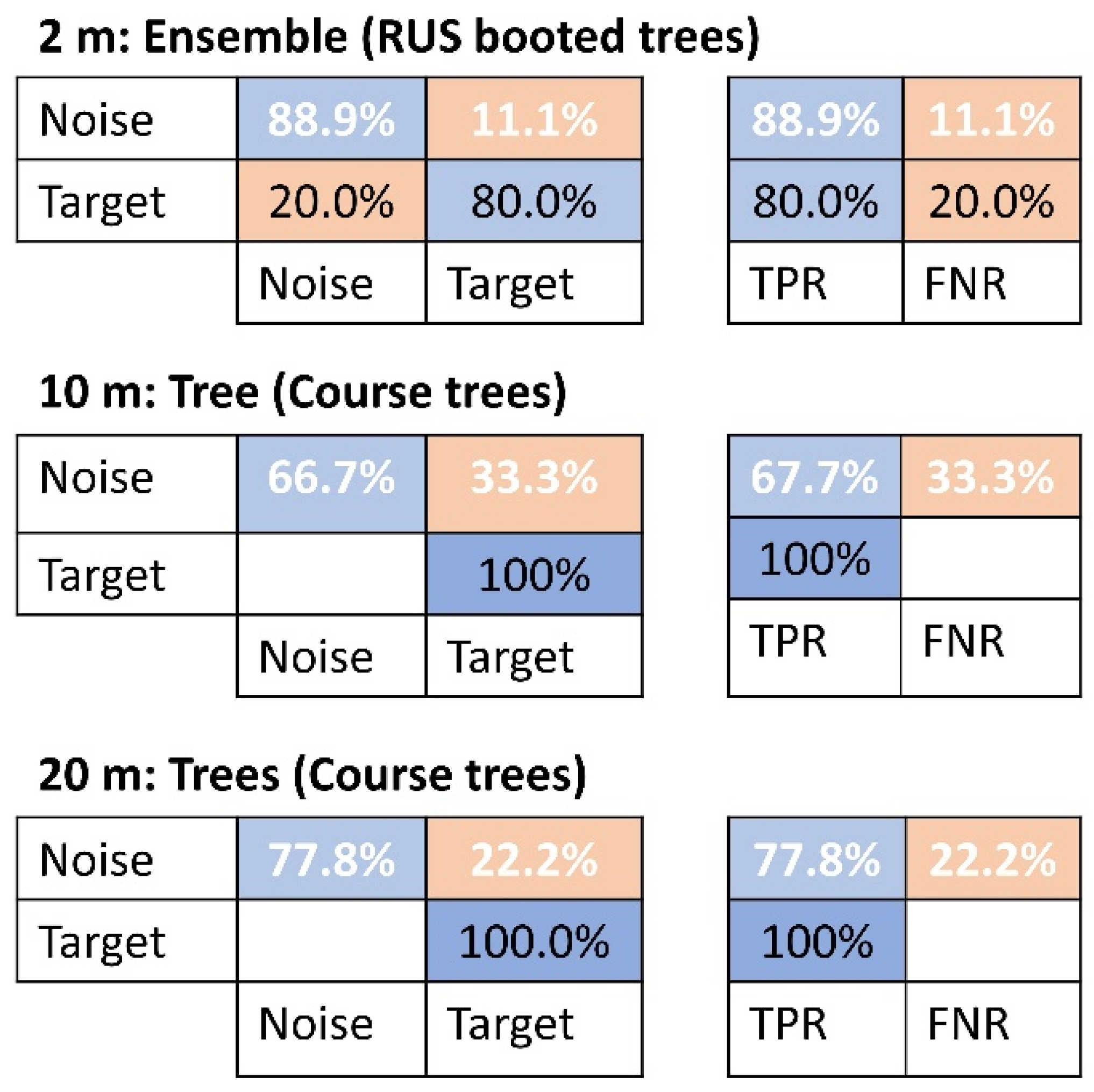
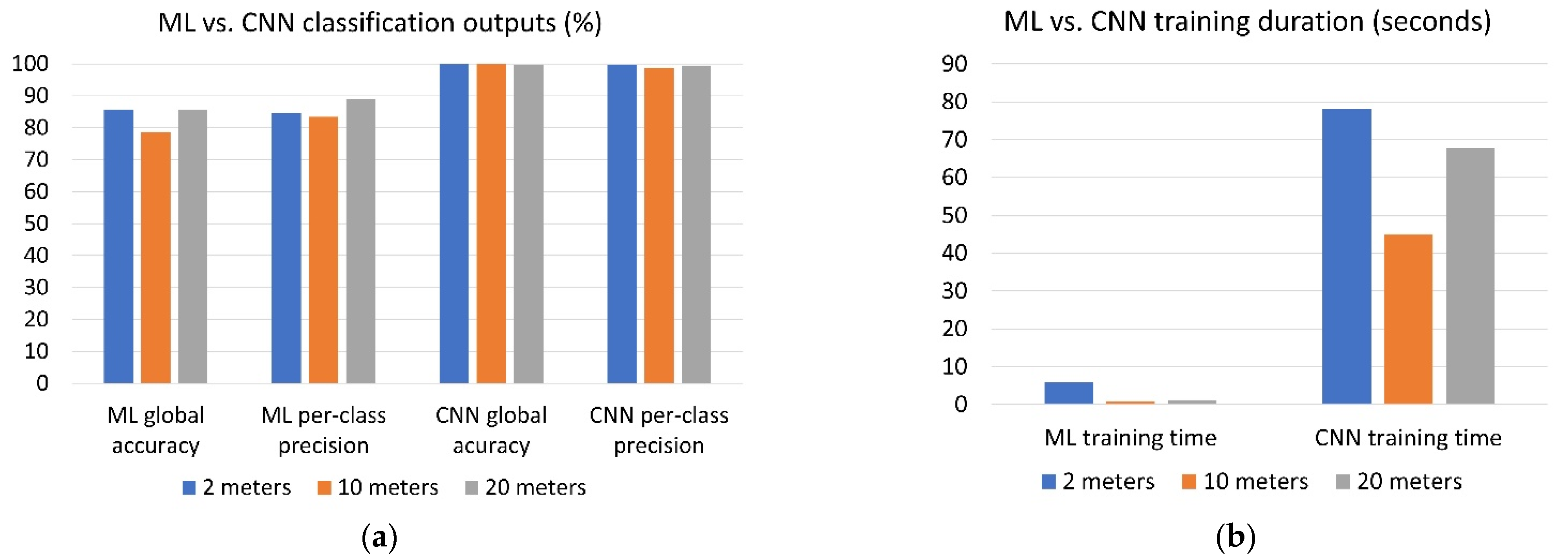
3.3.1. Classification via Machine Learning Models
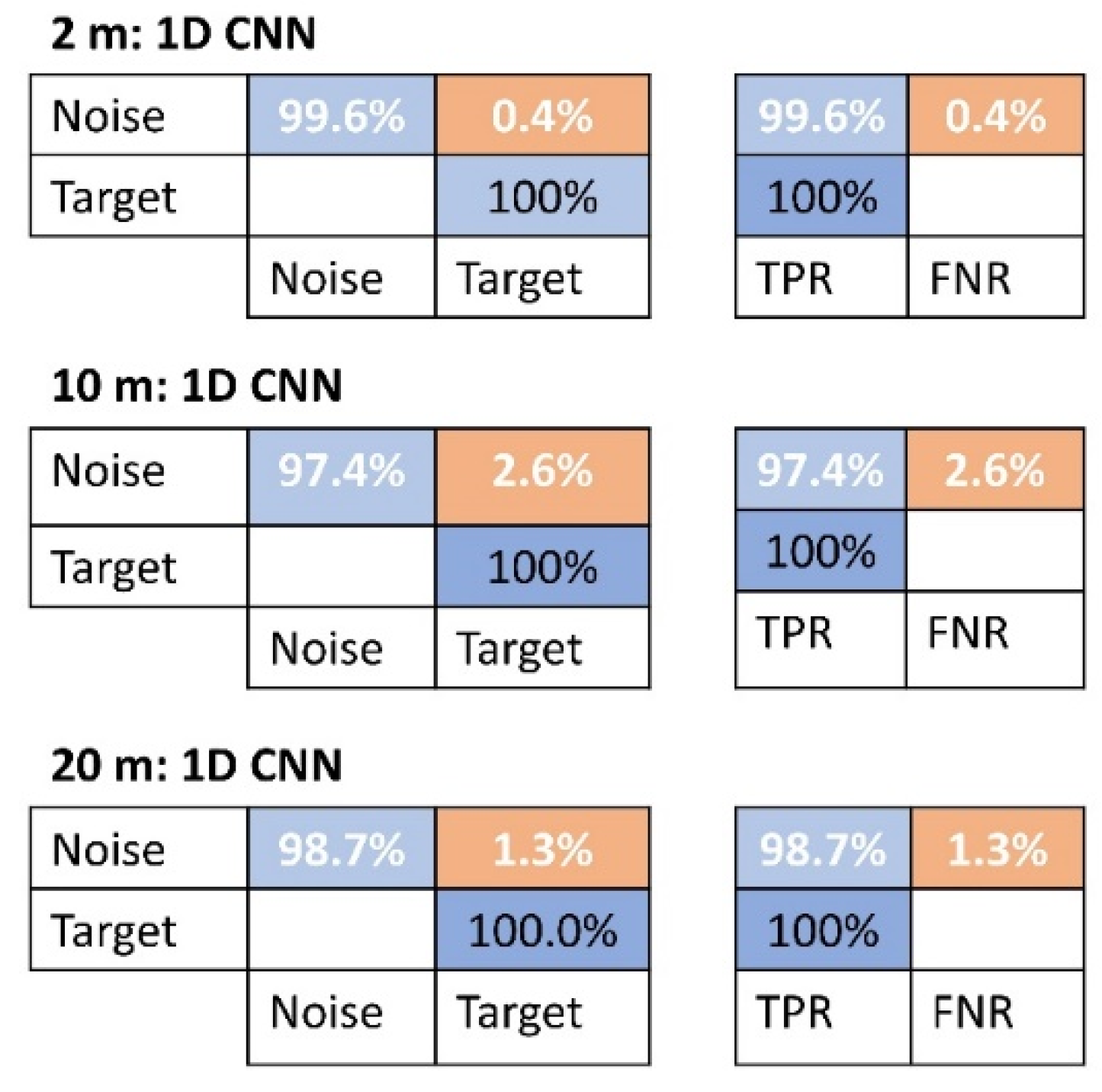
3.3.2. Classification via Deep Learning CNN
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Sinaice, B.B.; Takanohashi, Y.; Owada, N.; Utsuki, S.; Hyongdoo, J.; Bagai, Z.; Shemang, E.; Kawamura, Y. Automatic magnetite identification at Placer deposit using multi-spectral camera mounted on UAV and machine learning. In Proceedings of the 5th International Future Mining Conference 2021—AusIMM 2021, Online, 6–8 December 2021; pp. 33–42, ISBN 978-1-922395-02-3. [Google Scholar]
- Gaffey, C.; Bhardwaj, A. Applications of Unmanned Aerial Vehicles in Cryosphere: Latest Advances and Prospects. Remote Sens. 2020, 12, 948. [Google Scholar] [CrossRef] [Green Version]
- Erbe, H.-H.; Udd, J.E.; Sasiadek, J.Z. Mining Automation. IFAC Proc. Vol. 2004, 37, 299–304. [Google Scholar] [CrossRef]
- Mohajane, M.; Essahlaoui, A.; Oudija, F.; El Hafyani, M.; Cláudia Teodoro, A. Mapping Forest Species in the Central Middle Atlas of Morocco (Azrou Forest) through Remote Sensing Techniques. IJGI 2017, 6, 275. [Google Scholar] [CrossRef] [Green Version]
- Fox, N.; Parbhakar-Fox, A.; Moltzen, J.; Feig, S.; Goemann, K.; Huntington, J. Applications of Hyperspectral Mineralogy for Geoenvironmental Characterisation. Miner. Eng. 2017, 107, 63–77. [Google Scholar] [CrossRef]
- Sinaice, B.B.; Kawamura, Y.; Kim, J.; Okada, N.; Kitahara, I.; Jang, H. Application of Deep Learning Approaches in Igneous Rock Hyperspectral Imaging. In Proceedings of the 28th International Symposium on Mine Planning and Equipment Selection—MPES 2019; Springer Series in Geomechanics and Geoengineering; Topal, E., Ed.; Springer International Publishing: Cham, Switzerland, 2020; pp. 228–235. [Google Scholar] [CrossRef]
- van der Meer, F.D.; van der Werff, H.M.A.; van Ruitenbeek, F.J.A.; Hecker, C.A.; Bakker, W.H.; Noomen, M.F.; van der Meijde, M.; Carranza, E.J.M.; de Smeth, J.B.; Woldai, T. Multi- and Hyperspectral Geologic Remote Sensing: A Review. Int. J. Appl. Earth Obs. Geoinf. 2012, 14, 112–128. [Google Scholar] [CrossRef]
- Zhang, X.; Li, P. Lithological Mapping from Hyperspectral Data by Improved Use of Spectral Angle Mapper. Int. J. Appl. Earth Obs. Geoinf. 2014, 31, 95–109. [Google Scholar] [CrossRef]
- Ganesh, U.K.; Kannan, S.T. Creation of Hyper Spectral Library and Lithological Discrimination of Granite Rocks Using SVCHR -1024: Lab Based Approach. J. Hyperspectral Remote Sens. 2017, 7, 168–177. [Google Scholar]
- Sharma, N.; Sharma, R.; Jindal, N. Machine Learning and Deep Learning Applications-A Vision. Glob. Transit. Proc. 2021, 2, 24–28. [Google Scholar] [CrossRef]
- Weyermann, J.; Schläpfer, D.; Hueni, A.; Kneubühler, M.; Schaepman, M. Spectral Angle Mapper (SAM) for Anisotropy Class Indexing in Imaging Spectrometry Data. In Proceedings of the Imaging Spectrometry XIV, San Diego, CA, USA, 17 August 2009; p. 74570B. [Google Scholar] [CrossRef] [Green Version]
- Hu, H.; Feng, D.-Z.; Chen, Q.-Y. A Novel Dimensionality Reduction Method: Similarity Order Preserving Discriminant Analysis. Signal Process. 2021, 182, 107933. [Google Scholar] [CrossRef]
- Rauhala, A.; Tuomela, A.; Davids, C.; Rossi, P. UAV Remote Sensing Surveillance of a Mine Tailings Impoundment in Sub-Arctic Conditions. Remote Sens. 2017, 9, 1318. [Google Scholar] [CrossRef] [Green Version]
- Martelet, G.; Gloaguen, E.; Døssing, A.; Lima Simoes da Silva, E.; Linde, J.; Rasmussen, T.M. Airborne/UAV Multisensor Surveys Enhance the Geological Mapping and 3D Model of a Pseudo-Skarn Deposit in Ploumanac’h, French Brittany. Minerals 2021, 11, 1259. [Google Scholar] [CrossRef]
- Saha, D.; Annamalai, M. Machine Learning Techniques for Analysis of Hyperspectral Images to Determine Quality of Food Products: A Review. Curr. Res. Food Sci. 2021, 4, 28–44. [Google Scholar] [CrossRef] [PubMed]
- Girouard, G.; Bannari, A.; Harti, A.E.; Desrochers, A. Validated Spectral Angle Mapper Algorithm for Geological Mapping: Comparative Study between Quickbird and Landsat-TM. 6. 2014. Available online: https://www.researchgate.net/publication/228799788_Validated_spectral_angle_mapper_algorithm_for_geological_mapping_comparative_study_between_QuickBird_and_Landsat-TM (accessed on 4 July 2021).
- Shafri, H.Z.M.; Suhaili, A.; Mansor, S. The Performance of Maximum Likelihood, Spectral Angle Mapper, Neural Network and Decision Tree Classifiers in Hyperspectral Image Analysis. J. Comput. Sci. 2007, 3, 419–423. [Google Scholar] [CrossRef] [Green Version]
- den Hartog, D.; Harlaar, J.; Smit, G. The Stumblemeter: Design and Validation of a System That Detects and Classifies Stumbles during Gait. Sensors 2021, 21, 6636. [Google Scholar] [CrossRef] [PubMed]
- Chauhan, D.; Anyanwu, E.; Goes, J.; Besser, S.A.; Anand, S.; Madduri, R.; Getty, N.; Kelle, S.; Kawaji, K.; Mor-Avi, V.; et al. Comparison of Machine Learning and Deep Learning for View Identification from Cardiac Magnetic Resonance Images. Clin. Imaging 2022, 82, 121–126. [Google Scholar] [CrossRef] [PubMed]
- Kobayashi, S.; Ikuta, K.; Sugimoto, R.; Honda, H.; Yamada, M.; Tominaga, O.; Shoji, J.; Taniguchi, M. Estimation of submarine groundwater discharge and its impact on the nutrient environment at Kamaiso beach, Yamagata, Japan. Nippon. Suisan Gakkaishi 2019, 85, 30–39. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, H.H.; Carter, A.; Hoang, L.V.; Vu, S.T. Provenance, Routing and Weathering History of Heavy Minerals from Coastal Placer Deposits of Southern Vietnam. Sediment. Geol. 2018, 373, 228–238. [Google Scholar] [CrossRef] [Green Version]
- Beretta, F.; Rodrigues, A.L.; Peroni, R.L.; Costa, J.F.C.L. Automated Lithological Classification Using UAV and Machine Learning on an Open Cast Mine. Appl. Earth Sci. 2019, 128, 79–88. [Google Scholar] [CrossRef]
- Ono, M. Parallax Error Correction Techniques by Image Matching for ASTER/SWIR Band-to-Band Registration. In Proceedings of the Platforms and System, Rome, Italy, 9 January 1995; pp. 18–27. [Google Scholar] [CrossRef]
- Laurence, S.J. On Tracking the Motion of Rigid Bodies through Edge Detection and Least-Squares Fitting. Exp. Fluids 2012, 52, 387–401. [Google Scholar] [CrossRef] [Green Version]
- Singh Kushwah, J.; Kumar, A.; Patel, S.; Soni, R.; Gawande, A.; Gupta, S. Comparative Study of Regressor and Classifier with Decision Tree Using Modern Tools. Mater. Today Proc. 2021, S2214785321076574. [Google Scholar] [CrossRef]
- Mohammadi, M.; Rezaei, J. Ensemble Ranking: Aggregation of Rankings Produced by Different Multi-Criteria Decision-Making Methods. Omega 2020, 96, 102254. [Google Scholar] [CrossRef]
- Haixiang, G.; Yijing, L.; Shang, J.; Mingyun, G.; Yuanyue, H.; Bing, G. Learning from Class-Imbalanced Data: Review of Methods and Applications. Expert Syst. Appl. 2017, 73, 220–239. [Google Scholar] [CrossRef]
- Gholami, R.; Moradzadeh, A.; Yousefi, M. Assessing the Performance of Independent Component Analysis in Remote Sensing Data Processing. J. Indian Soc. Remote Sens. 2012, 40, 577–588. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV Drone Flight Elevation | Number of Images Captured | Flight Time (Minutes: Seconds) | Spatial Area Coverage (m2) | Battery Power Consumed during Mission (%) |
|---|---|---|---|---|
| 2 m | 80 | 21: 32 | 34 | 69 |
| 10 m | 32 | 8: 23 | 84 | 29 |
| 20 m | 8 | 2: 08 | 338 | 7 |
| UAV Drone Flight Elevation | Machine Learning Model | Global Accuracy (%) | Average Per-Class Precision (%) | Training Time (Seconds) |
|---|---|---|---|---|
| 2 m | Ensemble (Bagged Trees) | 78.6 | 83.4 | 8.4 |
| Ensemble (Subspace KNN) | 71.4 | 77.8 | 8.1 | |
| Ensemble (RUS Boosted Trees) | 85.7 | 84.5 | 5.8 | |
| 10 m | Tree (Fine-tree) | 78.6 | 83.4 | 1.5 |
| Tree (Medium-tree) | 78.6 | 83.4 | 1.0 | |
| Tree (Course-tree) | 78.6 | 83.4 | 0.9 | |
| 20 m | Tree (Fine-tree) | 85.7 | 88.9 | 1.9 |
| Tree (Medium-tree) | 85.7 | 88.9 | 1.2 | |
| Tree (Course-tree) | 85.7 | 88.9 | 1.0 |
| Flight Height | Global Accuracy (%) | Average Per-Class Precision (%) | Training Time (Seconds) |
|---|---|---|---|
| 2 m | 99.9% | 99.8% | 78 |
| 10 m | 99.9% | 98.7% | 45 |
| 20 m | 99.7% | 99.4% | 68 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sinaice, B.B.; Owada, N.; Ikeda, H.; Toriya, H.; Bagai, Z.; Shemang, E.; Adachi, T.; Kawamura, Y. Spectral Angle Mapping and AI Methods Applied in Automatic Identification of Placer Deposit Magnetite Using Multispectral Camera Mounted on UAV. Minerals 2022, 12, 268. https://0-doi-org.brum.beds.ac.uk/10.3390/min12020268
Sinaice BB, Owada N, Ikeda H, Toriya H, Bagai Z, Shemang E, Adachi T, Kawamura Y. Spectral Angle Mapping and AI Methods Applied in Automatic Identification of Placer Deposit Magnetite Using Multispectral Camera Mounted on UAV. Minerals. 2022; 12(2):268. https://0-doi-org.brum.beds.ac.uk/10.3390/min12020268
Chicago/Turabian StyleSinaice, Brian Bino, Narihiro Owada, Hajime Ikeda, Hisatoshi Toriya, Zibisani Bagai, Elisha Shemang, Tsuyoshi Adachi, and Youhei Kawamura. 2022. "Spectral Angle Mapping and AI Methods Applied in Automatic Identification of Placer Deposit Magnetite Using Multispectral Camera Mounted on UAV" Minerals 12, no. 2: 268. https://0-doi-org.brum.beds.ac.uk/10.3390/min12020268