1. Introduction
Advanced Virgo (AdV) is a recycled Michelson interferometric gravitational wave detector [
1]. It is a second generation detector, part of a worldwide network, which along with LIGO, allowed for the recent discoveries in gravitational wave research [
2,
3,
4]. Detection occurs at near complete destructive interference at a working point known as the dark fringe, where the interferometer (ITF) is sensitive to the differential signals generated by the passage of a gravitational wave. The high sensitivity of AdV is due, in part, to the 3 km Fabry–Perot arm cavities which enhance the light field by a factor of ~290. However, the sensitivity decreases with any asymmetry in the arm cavities due to the coupling of common noises, such as laser frequency or power noise, to the detector output [
5,
6].
One such asymmetry is due to differences of the finesse of each of the arm cavities, north and west. The finesse asymmetry,
, was restricted to below 1% for optimal detector sensitivity [
1] after the effect on ITF performance parameters were studied [
7,
8]. The metric for the overall ITF performance is the binary neutron star (BNS) range which is defined as the distance at which a single detector could observe the coalescence of a pair of 1.4 solar mass neutron stars with a signal-to-noise ratio of 8 [
9]. The asymmetry of finesse spoils this parameter, and thus a lower finesse asymmetry corresponds to a maximum in the BNS range. Finesse is a function of the input and end test mass mirror reflectivites, which are turn is dependent on the mirror anti-reflective (AR) and highly reflective (HR) coatings. The finesse asymmetry requirement specified a mirror coating tolerance which surpassed manufacturing capabilities at the time of construction. These limitations were avoided by including the etalon effect into the AdV arm cavity design, first implemented in the previous generation Virgo+ detector [
10].
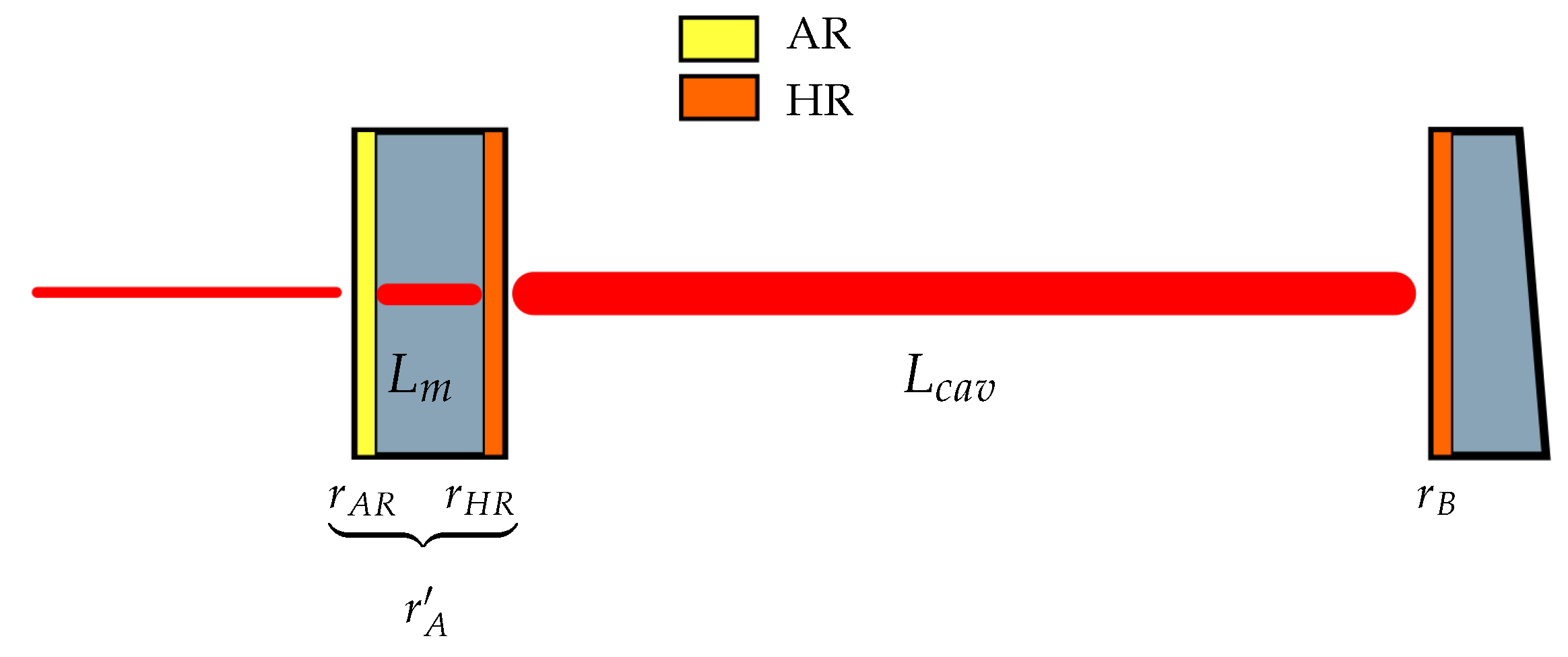
The spherical input test mass mirrors feature parallel faces which establish an optical resonator, or etalon, within the mirror substrate between the AR and HR coatings. Instead, the end test mass has a wedge opposite the HR coated side, eliminating the possibility of an etalon, and fixes the mirror properties to those of the manufactured coating. The resonance condition of the etalon cavity contributes to the overall input mirror reflectivity. By tuning the etalon resonance, the arm cavity finesse is tuned independent of the coating properties.
Punturo [
11] describes how the optical path length (OPL) dependent etalon resonance condition is varied by the input mirror substrate temperature and the subsequent effect on the arm cavity finesse.
Figure 1 shows a simplified schematic of the arm cavity with relevant parameters for the etalon effect. The finesse is calculated by [
12]
where
is the reflectivity of the end mirror. The overall input mirror reflectivity,
, combines the mirror coating property with the etalon effect and is calculated by [
11]
where
t is the transmissivity,
r is the reflectivity,
is the etalon optical path length, and the subscripts represent the AR and HR coatings of the mirror. As shown in Equation (
2), the input test mass reflectivity is a function of
which determines the resonance condition of the etalon cavity. As the etalon cavity medium is fused silica, SiO
2, instead of a vacuum, the OPL is a function of the substrate temperature [
13]:
where
is the nominal geometric length of the substrate at room temperature,
is the temperature-dependent index of refraction, and
is the coefficient of thermal expansion. For this analysis, it is assumed that there are no spatial thermal gradients in the mirror. Differentiating Equation (
3) reveals that changes in the OPL are due to two mechanisms, thermorefractive and thermoelastic:
where, for fused silica [
14,
15] at room temperature (
),
,
and
. The change in temperature required to change the OPL through a complete free spectral range, termed etalon fringe, is calculated by solving Equation (
4) for
with
nm for the infrared beam and
m.
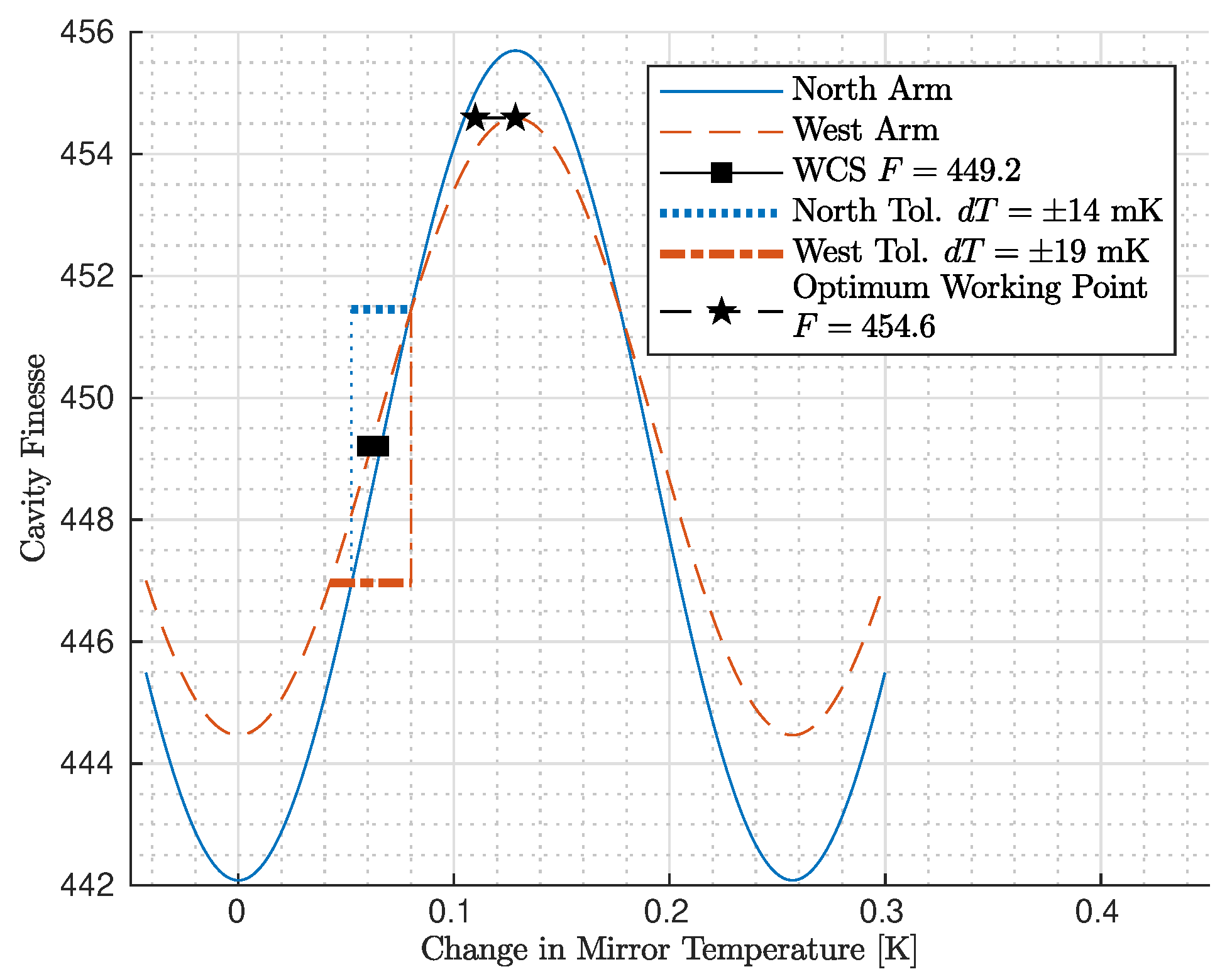
The effect of the arm cavity finesse throughout an etalon fringe was predicted by using a FINESSE [
16] frequency domain simulation. The results of the simulation are shown in
Figure 2. With the measured mirror coating parameters, the etalon effect is able to correct a finesse asymmetry up to 2.8%. These results also indicate that an uncontrolled etalon effect will push the finesse asymmetry out of the 1% requirement. The optimum working point occurs when the two cavity finesses are equalized at the maximum of the west arm finesse; the BNS range is maximized by minimizing the finesse asymmetry and maximizes the cavity finesse. Instead, in order to determine the temperature requirement, the worst case scenario (WCS) is considered, wherein the finesse is matched at the maximum slope of the derivative,
, and the north and west test masses must maintain mirror temperature accuracies of 14 and 19 mK, respectively, in order to remain within the 1% finesse asymmetry requirement. This tolerance band is shown by the horizontal lines in
Figure 2. These temperature tolerances agree well with measured BNS range fluctuations as a function of mirror temperatures [
17]. Assuming that the working point corresponds with one of the peaks in the fitted sine functions, in order to maintain 1% BNS range tolerance, the north and west mirror temperature must maintain accuracies of 25 and 21 mK, respectively.
Etalon control was implemented in Virgo on a previous generation of the detector, Virgo+ [
18,
19]. The gain of this controller was tuned to achieve an accuracy of 30 mK, which greatly stabilized the performance of the ITF, particularly in the BNS range. This control replaced the previous “human in the loop” method [
20], where the correction voltage to the actuator was manually adjusted every few days. The physical configuration of the ITF changed appreciably from Virgo+ to AdV such that this control was no longer directly compatible. In particular, the etalon mirror volume increased significantly, which decreased the effective power of the actuator.
This paper presents the current application of the etalon control in AdV. The control system is developed in detail, including a development of the thermodynamic heat transfer system and justification for the two-pole plant model representation. Two controller filter designs are presented and compared against each other and the uncontrolled case in terms of temperature accuracy and recovery time after a step input. Finally, a separate unlock condition control methodology is developed to account for the drastic plant change when the ITF unlocks and the laser heating is removed.
3. Results
3.1. Recovery Speed after Unlock
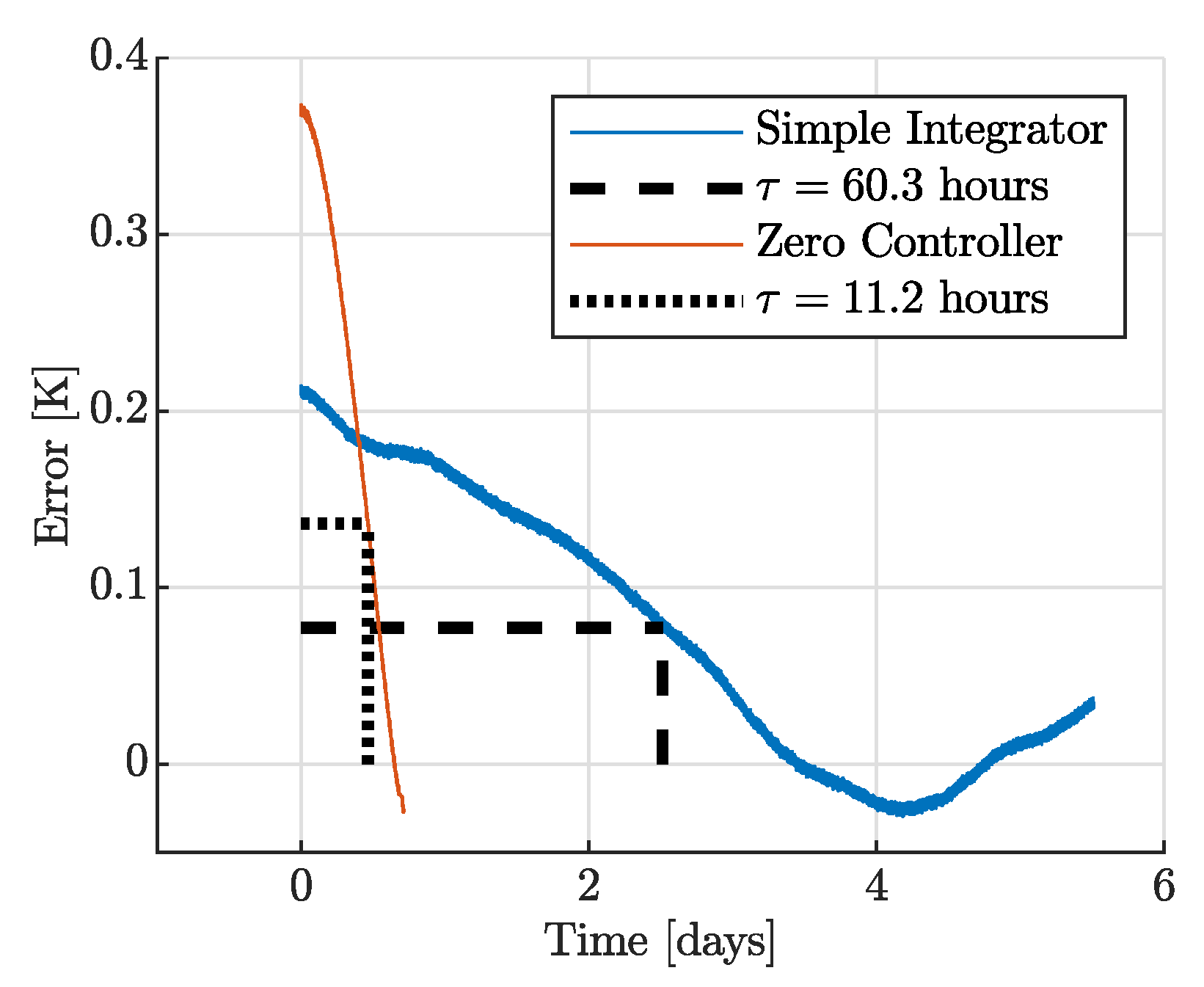
Because of the large number of unlocks due to seismic activity, meteorological events, manual settings, and detector glitches, it is important for the etalon to recover quickly after an unlock. After an unlock, the error may be at an arbitrary value depending on the length of the unlock, tunnel temperature, error at unlock, etc. The speeds of the control filters are compared by finding the time it takes the temperature error to reach of the initial value after an unlock or a temperature set point change. The data for each of the control filters were chosen such that the temperature error was sufficiently large and the ITF remained locked after the starting point for the temperature error to reduce to at least . The available events for the zero controller were limited, as the temperature error was generally low, within 50 mK.
Figure 7 shows the speed comparison between the simple integrator and the zero controller. The time constant of the zero controller is five times faster than the simple integrator.
3.2. Controller Accuracy
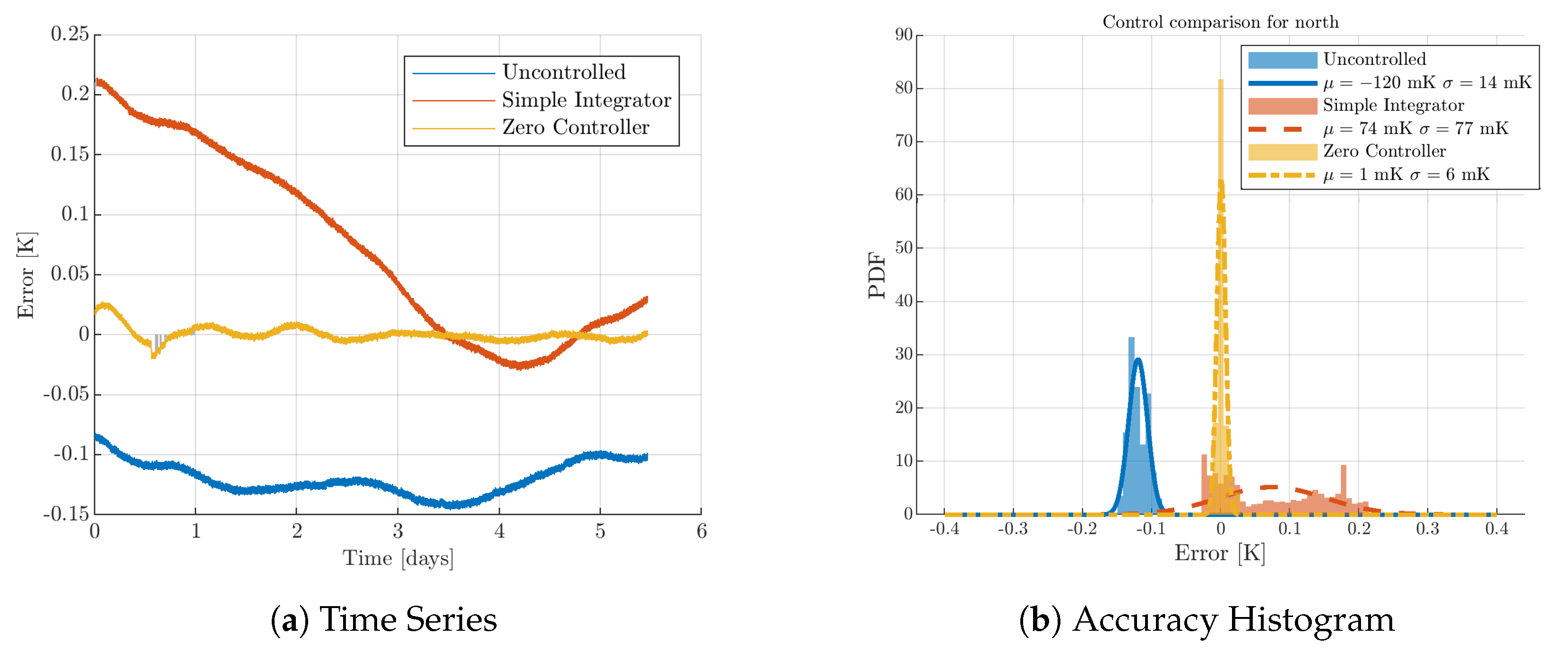
The controller accuracy was determined by calculating a probability density function (PDF) of the mirror temperature error for the longest lock period during each control filter implementation. In order to fully characterize the behavior, the accuracy of the uncontrolled mirror temperature was also analyzed. For the uncontrolled case, the error is defined as the difference between the closest optimal etalon working point that maximizes detector sensitivity and the measured temperature. The longest lock of all three cases was 132 h (5.5 days), which is the maximum possible due to the intentional unlocks for calibration held on Wednesday evenings and the maintenance period on Tuesday mornings.
Figure 8 compares the PDFs of the three cases. A normal distribution was fit to each by using the mean and standard deviation. The uncontrolled case exhibits poor accuracy at almost half fringe, albeit a small standard deviation. The behavior was expected, as the primary actuator on the mirror temperature during the long lock of the uncontrolled etalon consists of day/night tunnel temperature fluctuations. The accuracy is somewhat arbitrary and is highly seasonally dependent, even weekly dependent.
The best performance was given by the zero controller. The accuracy is remarkable—a mean error of 1 mK with a standard deviation of 6 mK. The temperature error was relatively low at the start of the lock period. However, given the speed of the controller presented in
Section 3.1, the control filter is assumed to have similar performance with a larger initial error.
The simple integrator shows noticeably increased accuracy with a much lower standard deviation than the uncontrolled case. Note that the 0.2 K initial temperature error was significantly higher than that of the zero controller. The actuator driving the error to zero constituted the majority of the lock, which can be seen by the intermediate data points in
Figure 8. It is difficult to properly characterize the performance of the simple integrator, as the time it takes to reach the set temperature is comparable to the maximum allowable lock period. However, given the speed of the simple integrator control and the number of unlocks exhibited by the ITF, this is representative of the anticipated long term performance.
3.3. Unlock Condition Control
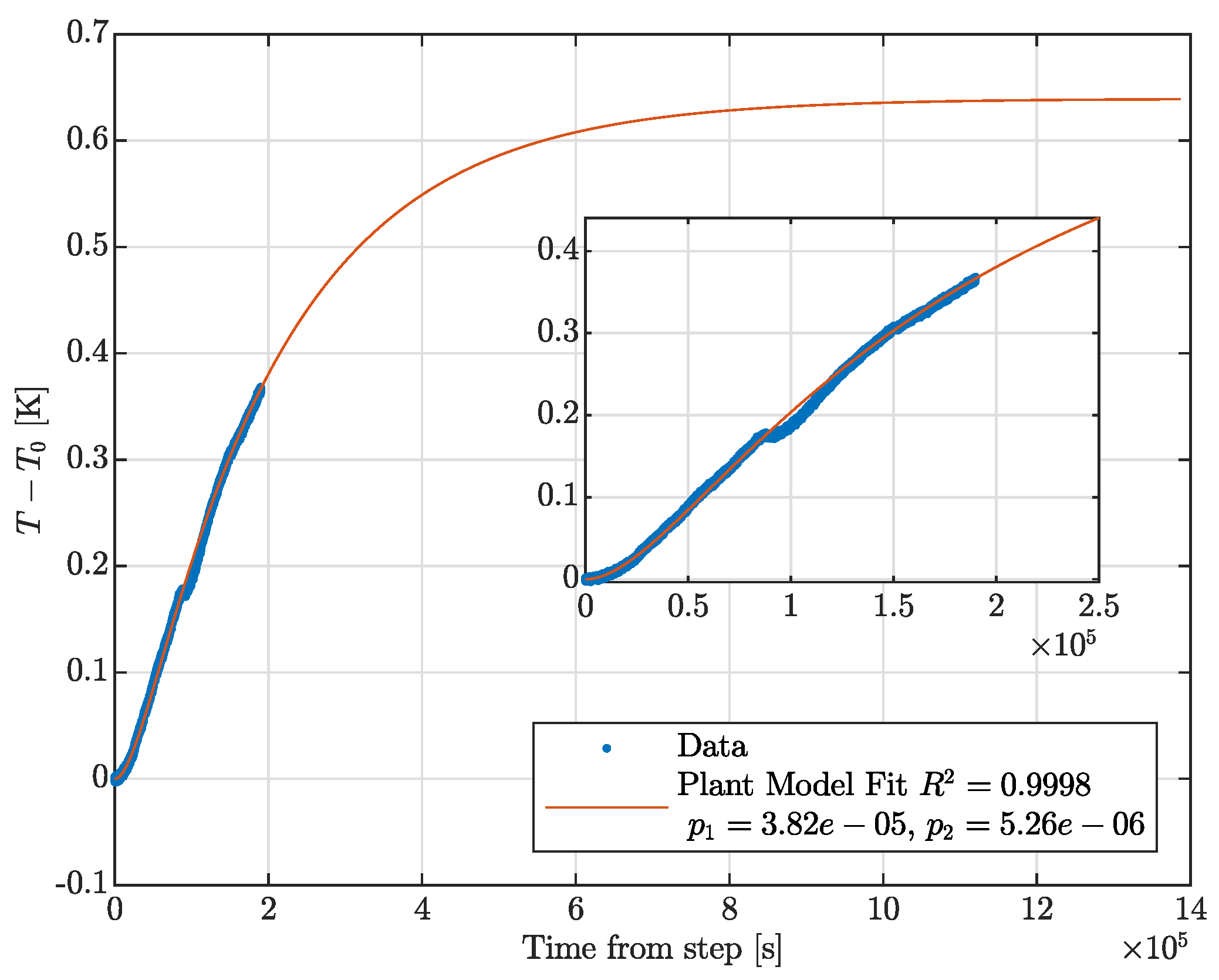
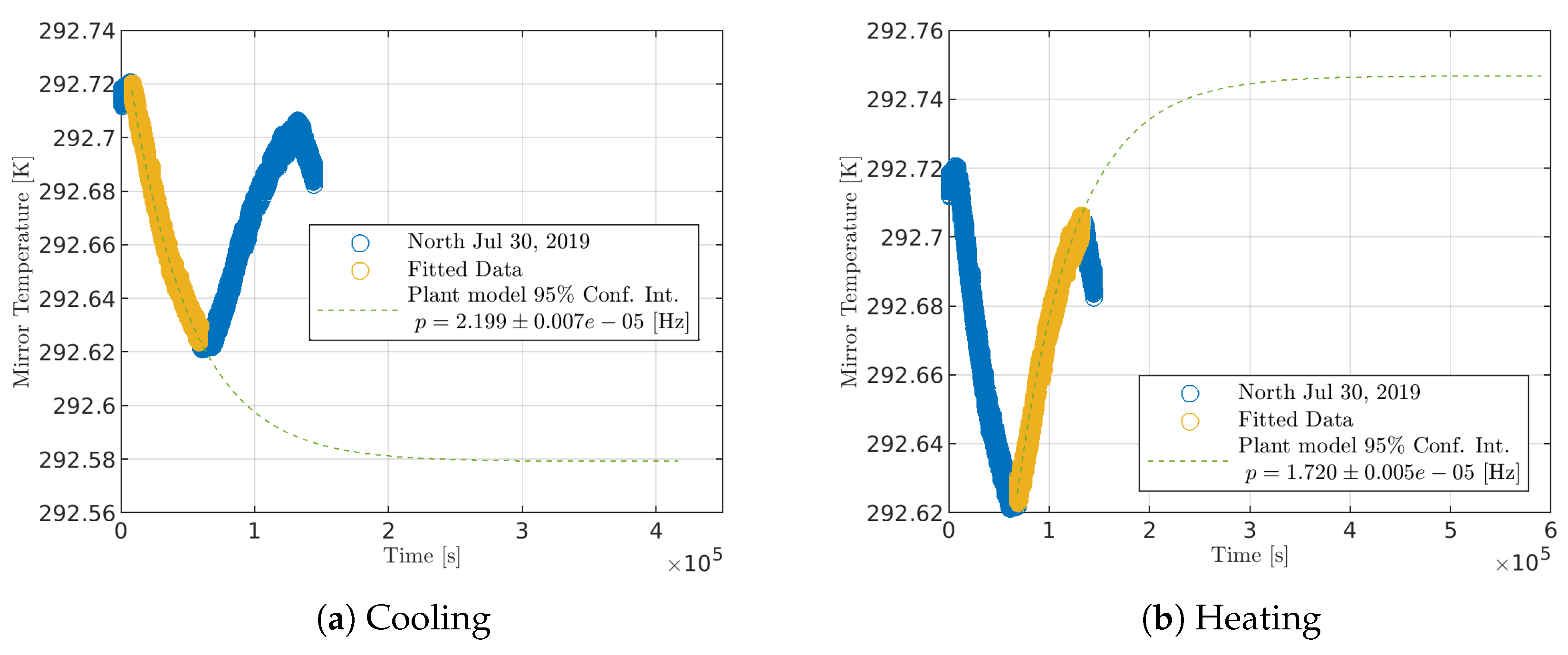
The last design consideration for the etalon control is a methodology for when the ITF unlocks. After an unlock, the mirror rapidly cools without the laser heat transfer. Likewise, the mirror rapidly heats at the subsequent lock acquisition. The mirror temperature change due to the ITF unlock and lock acquisition represents a step response of a single-pole system. The system may be derived from Equation (
6) focusing on the mirror temperature and the laser power:
where the radiation heat transfer term on the right-hand side is proportional to the mirror temperature,
.
Figure 9 shows that the mirror cooling and heating after an unlock with the step response of a single-pole system fit to the data. The fit agrees very well with the data as the 95% confidence interval only has a small deviation from the fitted poles. The laser plant is approximately an order of magnitude faster than the actuator plant given in
Table 1. The two laser plants are expected to be equivalent; however, there is a slight discrepancy in the measured poles. These measurements are considered preliminary and were used for the initial development of the unlock condition. Further measurements are necessary to explain this discrepancy.
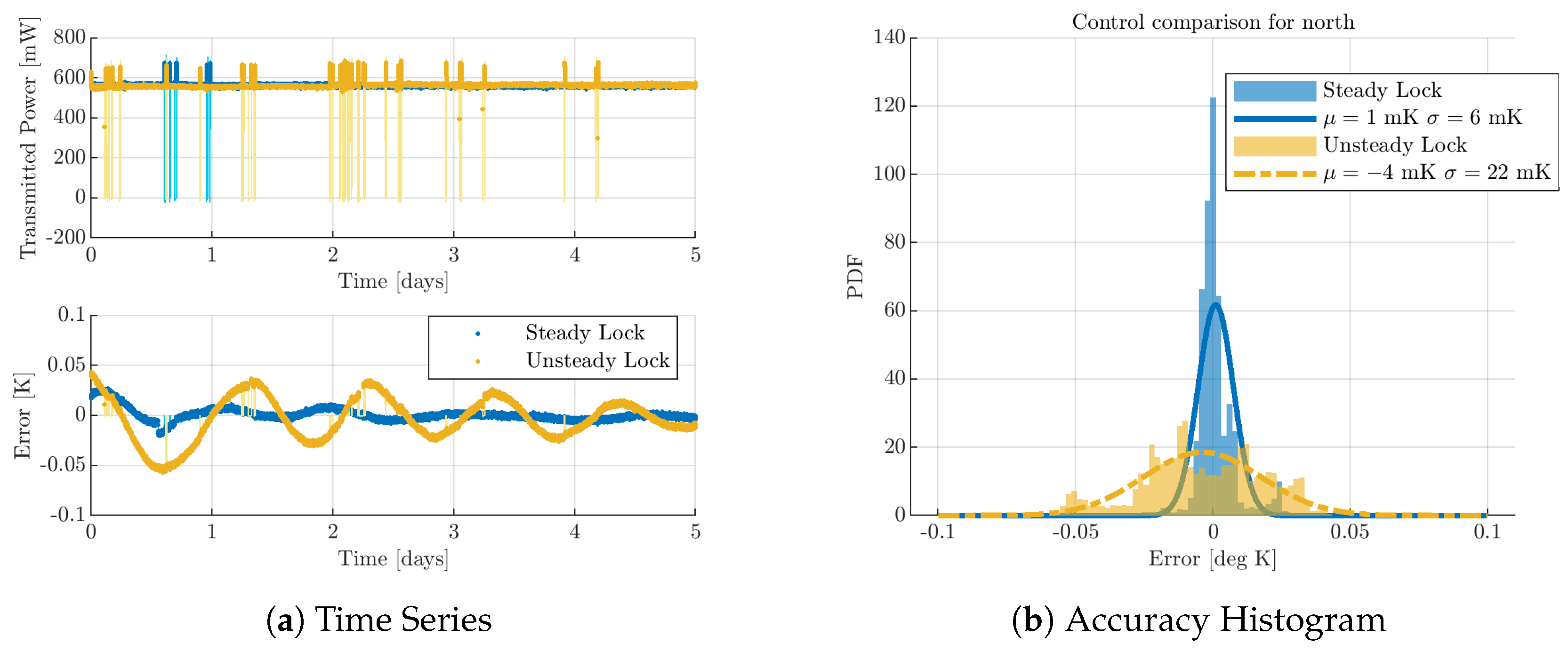
Due to the speed of the laser plant, the defined etalon control cannot be used during an unlock period. The actuator corrections will grow artificially large as the heating belt attempts to compensate for the laser heat transfer, leading to significant overshoot errors when the ITF relocks. Two methods have been employed to allow for etalon control during unlock periods. Initially, when the ITF unlocked, the last correction value was held constant until the ITF relocked. The value was filtered by a clipping function using a known, manually set steady state value to avoid an overly large or small correction. However, this method is not the ideal because the manually set steady state correction voltage is seasonally dependent and the error may continue to increase for longer unlock periods.
Figure 10 shows the effects of unlocks under this initial constant correction control by comparing the accuracy and precision of the zero controller during a period of steady lock (same data as
Figure 8) and during a period where there were multiple unlocks. The accuracy is high for both periods as the temperature error distribution is centered around 0. However, the precision is decreased when there are multiple unlocks, as the PDF flattens and the standard deviation increases to 22 mK. This accuracy is outside the north arm tolerance to maintain the 1% finesse asymmetry requirement, and will be exacerbated for longer unlocks.
A new unlock condition has been designed to make the absence of the laser heat transfer unknown to the etalon control by using the laser plant identified in
Figure 9. When the ITF unlocks, the response of the laser plant to a step input equal to the laser power is used to generate a temperature offset. The offset is subtracted from the set temperature so that the etalon control follows the laser cooling and no step is observed by the control. When the ITF relocks, the step response of the laser plant is used again to return the offset back to zero. When the the offset is within a certain tolerance of zero, it is reset so that the set temperature returns to nominal.
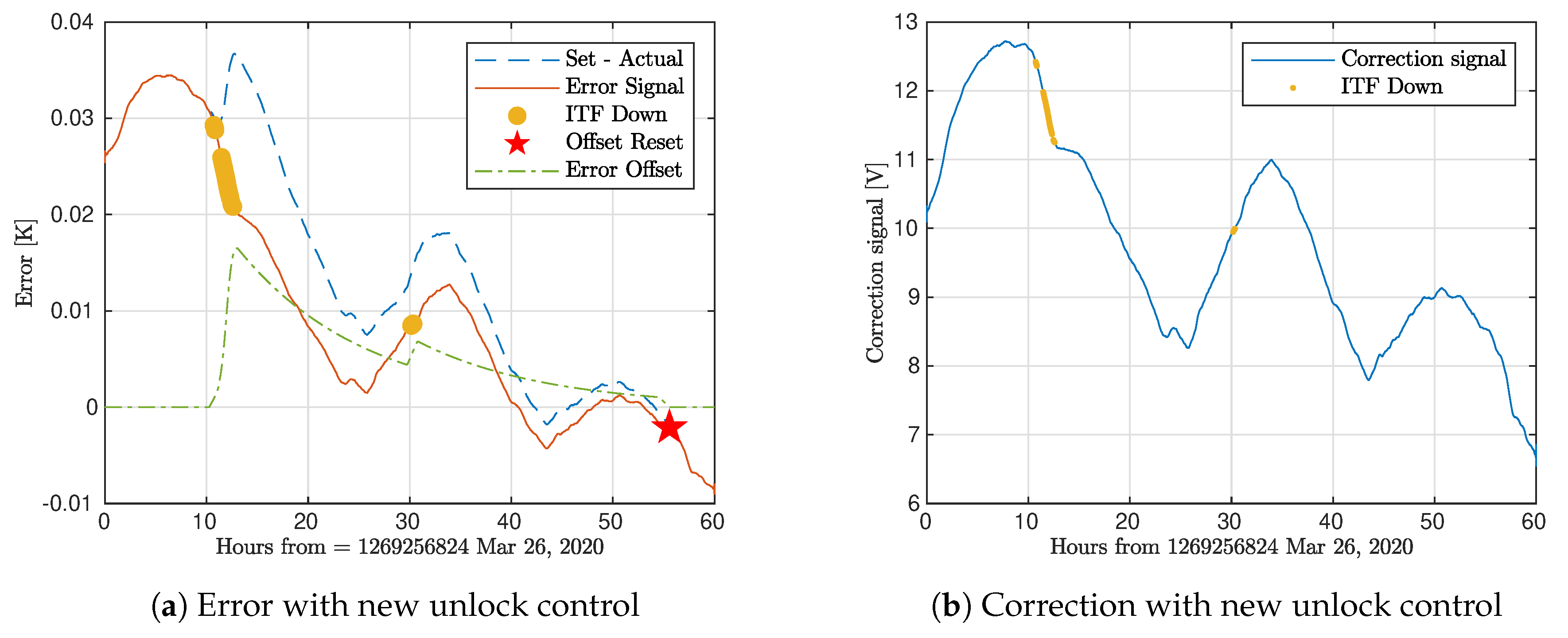
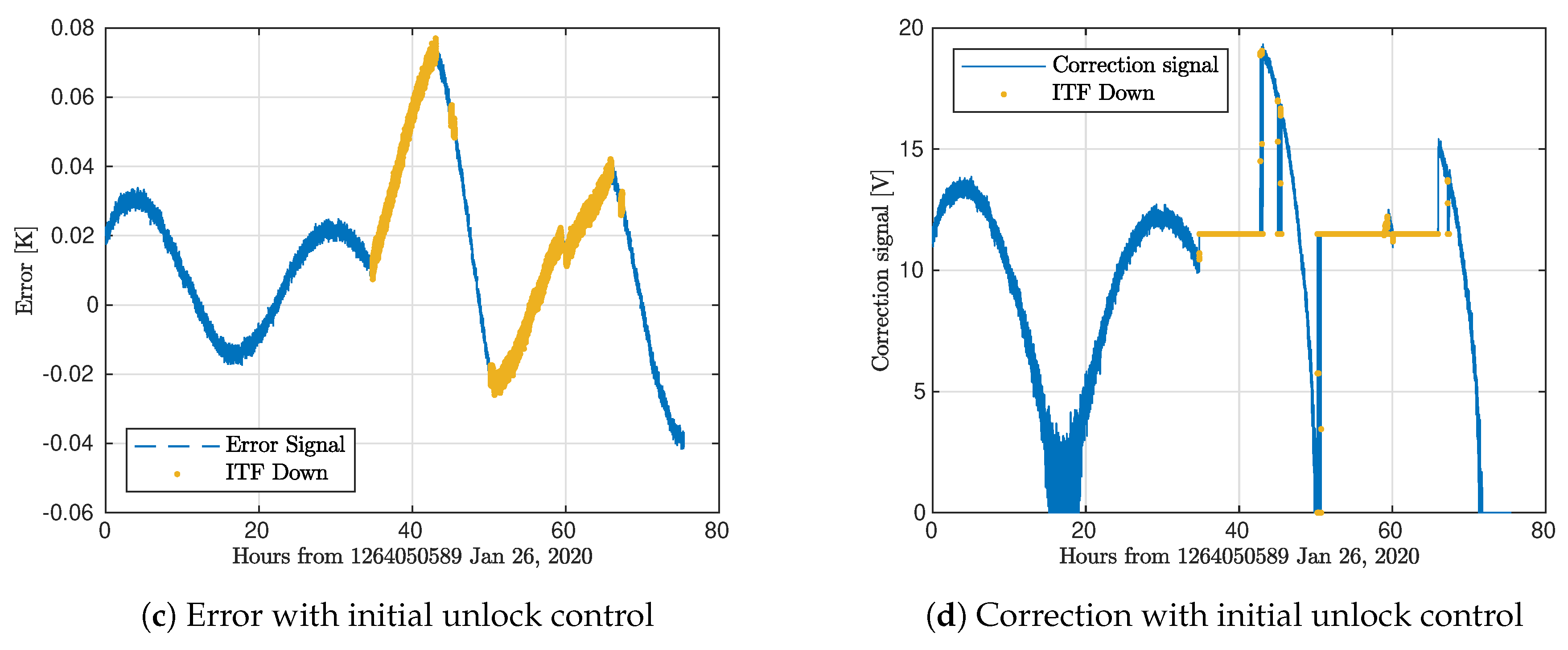
The performances of the two unlock controls are shown in
Figure 11, with the new control shown in the top plots and the initial control in the bottom. In
Figure 11a,b, the ITF unlocks around the 10 h mark. At this point the offset is shown to increase to match the mirror cooling. The “set–actual” temperature curve is also seen to increase, indicating that without the new unlock control, the error would sharply increase. Instead, the error signal with the new unlock control remains smooth, without the presence of a step.
Figure 11b shows that the actuator correction signals remain smooth and predicable during the unlocked periods, indicating that the control is not overcompensating for the laser heating. Note, the data in
Figure 11a,b were smoothed to better display the behavior of the down condition control. The data in
Figure 11c,d were not smoothed due to the steps in the control when the ITF unlocks and relocks.
Figure 11c,d shows the behavior of the control with the initial unlock condition. Up until the unlock at 35 hours, the error and the corrections were smoothly varying to the set temperature. When the ITF unlocks, the error increases sharply as the mirror cools, and the corrections go to the constant value. After the ITF relocks, the increased error is seen as a step for the control which responds with a large correction signal. The combination of this large correction and the laser heating quickly overshoots the set temperature, which is evident by the steep approach to the set temperature. With the new unlock condition, these overshoots are avoided and the error is reliably driven to zero.
Unfortunately, the unlock condition was implemented a few days before the end of the O3b run and no long term data are available for statistics.
4. Discussion
Mirror temperature control was implemented in Advanced Virgo to vary the intra-mirror etalon cavity and balance the arm cavity finesse for optimal performance. A two-pole system step response matches the measured plant step response with a high coefficient of determination, where the high frequency pole is identified as heat transfer from the actuator to the surrounding tower and the low frequency pole is the subsequent radiation heat transfer from the tower to the mirror. The developed zero controller filter achieves 6 mK accuracy with a 11.2 hour response time to 0.67 etalon fringe step input—a notable improvement from the 30 mK accuracy of the previous Virgo+ control. These findings confirm that the etalon effect is a viable feature with which to achieve symmetry between interferometer arms, particularly to supplement manufacturing tolerance capabilities. Finally, a control methodology was developed compensate the temperature error during interferometer unlock periods by adding an offset to the error signal equal to the mirror temperature step response of laser cooling.
The Advanced Virgo detector manufacturing can provide excellent finesse asymmetries (less than 0.5%) [
30]. However, the implementation of etalon can further reduce the finesse asymmetry down to 0.06% [
31,
32] when the optimal working point is set; see
Figure 2. Moreover, the etalon provides flexibility to adapt to unexpected degradation of the finesse asymmetry. Furthermore, the choice for the parallel faces needed for etalon simplifies the optical design of the central area in that wedges are no longer needed.
In theory, there is still a large margin to improve the etalon control which makes us confident to achieve a better equalization of the finesse asymmetry with respect the manufacturing. These methodologies and control filters must be continuously developed as new data are generated. Unfortunately, the premature ending of the O3b run limited the amount of data available for analysis. Future implementations of the control should incorporate the modern control state-space representation. This realization will require the calibration of the uncontrolled surface temperatures in order to fully define the heat transfer system. In this way, arbitrary inputs from seasonal temperature variations may be accounted for by the control system.

 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}