3.1. Mathematical Analysis-Tangential and Normal Force Analysis
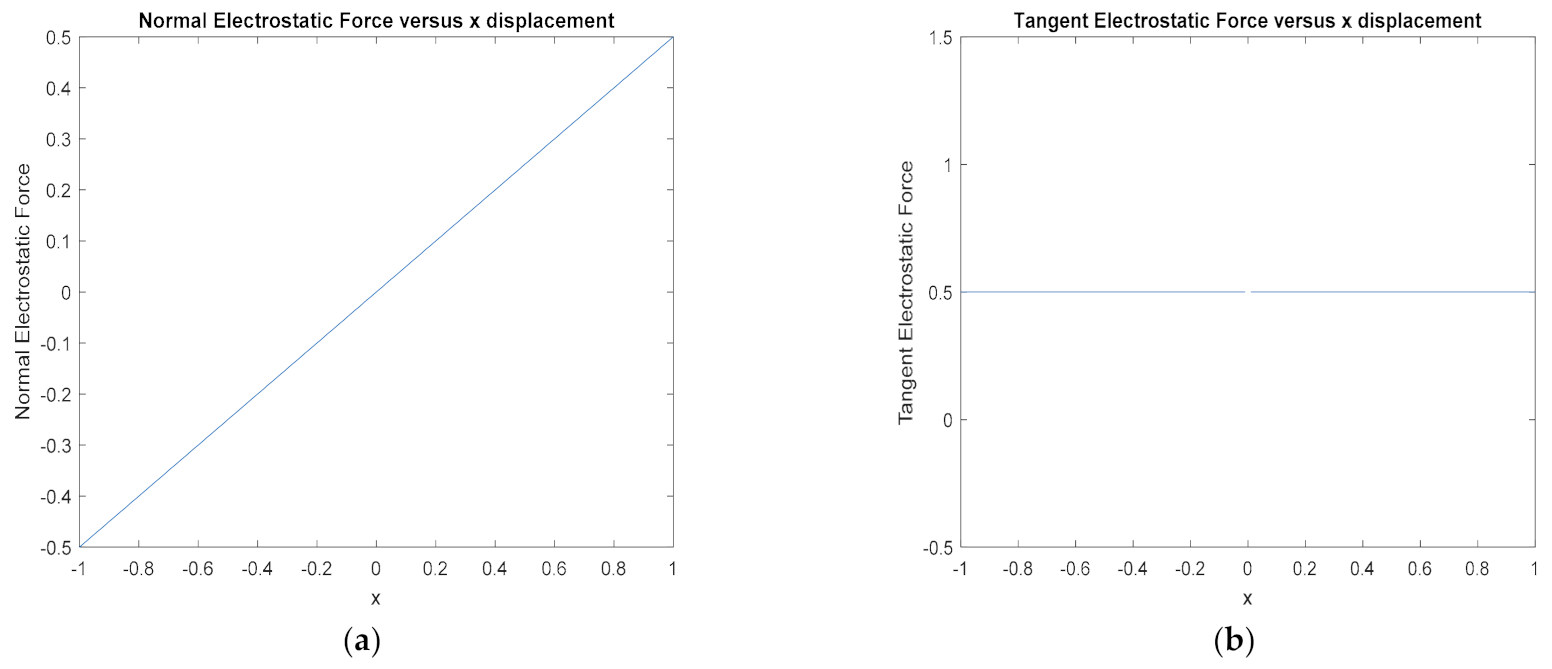
If we analyze the change in forces with respect to the change in the crossover of electrodes denoted as ‘x’, we can assume that we are analyzing a system that is being driven by tangential forces since they move along this axis. Here, we can see that the normal forces in
Figure 18a are increasing linearly with respect to increases in x which pull towards the y direction. However, since y is stationary, held constant by a thin filament, we assume that these are contact forces that will increase the fictional forces in the driving ‘x’ direction. These forces will need to be canceled or minimized by designing rigid comb structures, such as in
Figure 5, as they start to exceed the tangential driving forces. Now, looking at the tangential driving forces as the ‘crossover’ of electrodes increases, we can see that they remain at a constant value no matter how much they actuate (
Figure 18b). This means that we can accurately control the force we apply to the system by simply increasing the voltage.
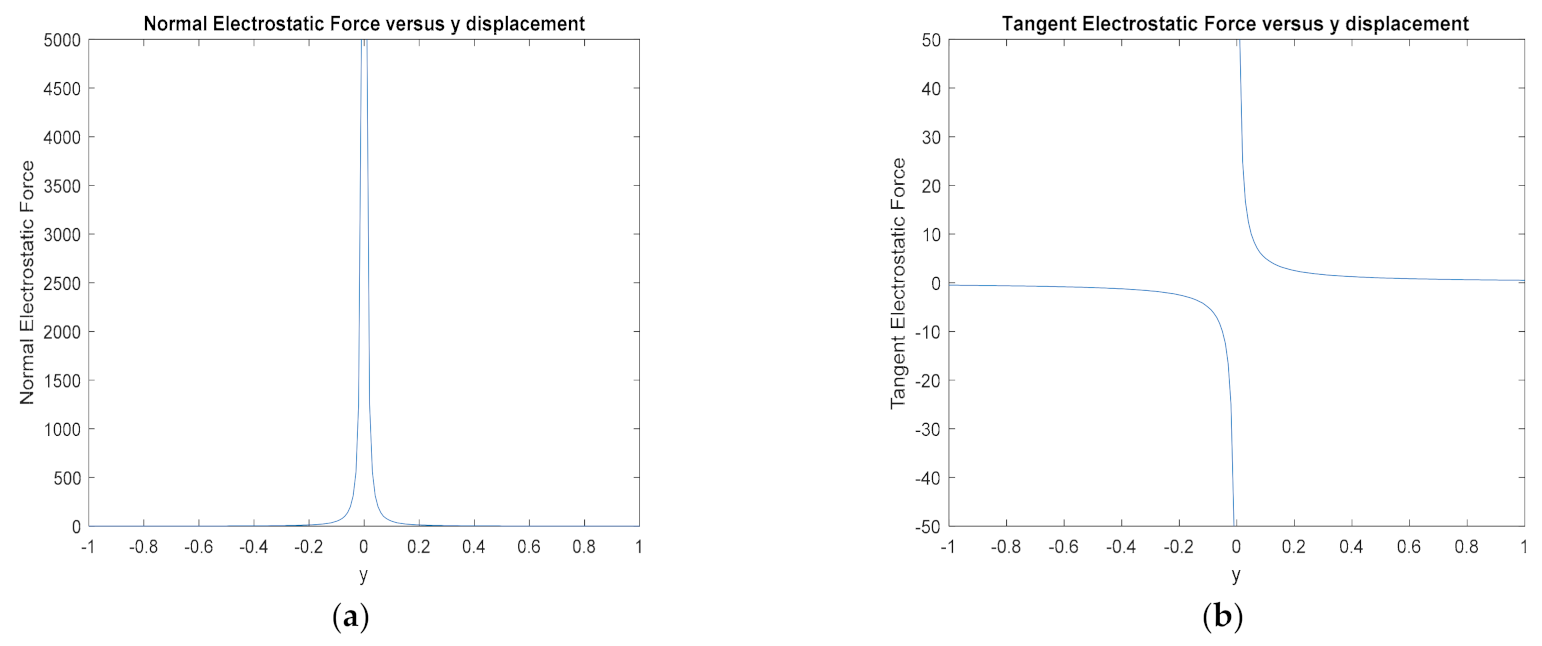
Now, looking at the forces with respect to the change in the distance between electrodes ‘y’, we can assume that the normal forces are the driving forces in this case, as it is along the same axis of displacement. The normal forces, in
Figure 19a, are extremely small; however, as the electrodes approach each other there is an inflection point, such as on an exponential scale, where the forces tend towards infinity. Thus, these forces can be very strong, though they will not actuate long distances due to the rapid dissipation at distance, which is where the zipping mechanism overcomes this issue by always having a portion of the electrode close together. This, however, also shows that, once these forces reach the inflection point, the system will become unbound, and the electrode rapid ‘pull in’ to full actuation, meaning that there is no control of how much actuator (as well as zipping) will occur. The tangent forces in
Figure 19b seem to operate much the same as the normal forces, however, since the center of the electrodes are often aligned, in the normal driven designs, these forces are usually canceled out.
From our mathematical analysis, we were able to determine that, by driving our actuator with normal forces, we can get much higher forces; however, the force cannot be applied at a distance. As well as this, there is no control of the displacement once it passes the ‘pull-in’ transition position. With tangential driven actuators, we have demonstrated that the potential applied force will generally be lower than the normal forces to keep the frictional forces caused by the normal forces from opposing the actuator. However, we can achieve a much higher strain, as the force is a constant no matter how much or little the crossover of the electrodes are, as well, because of the constant force, so we have easy control over the actuation distances (or strain) because the only other independent variable is the voltage.
3.2. FEM Analysis
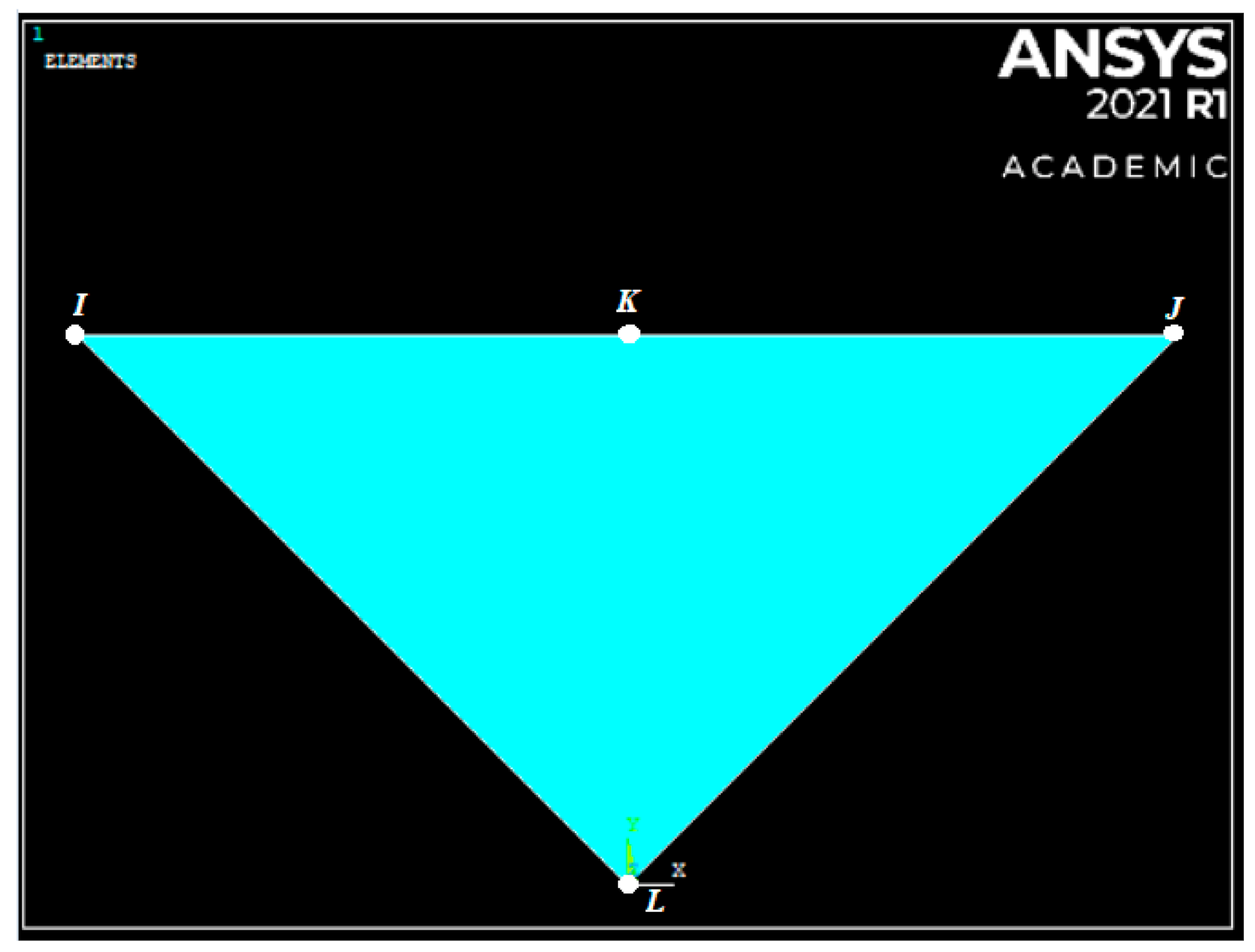
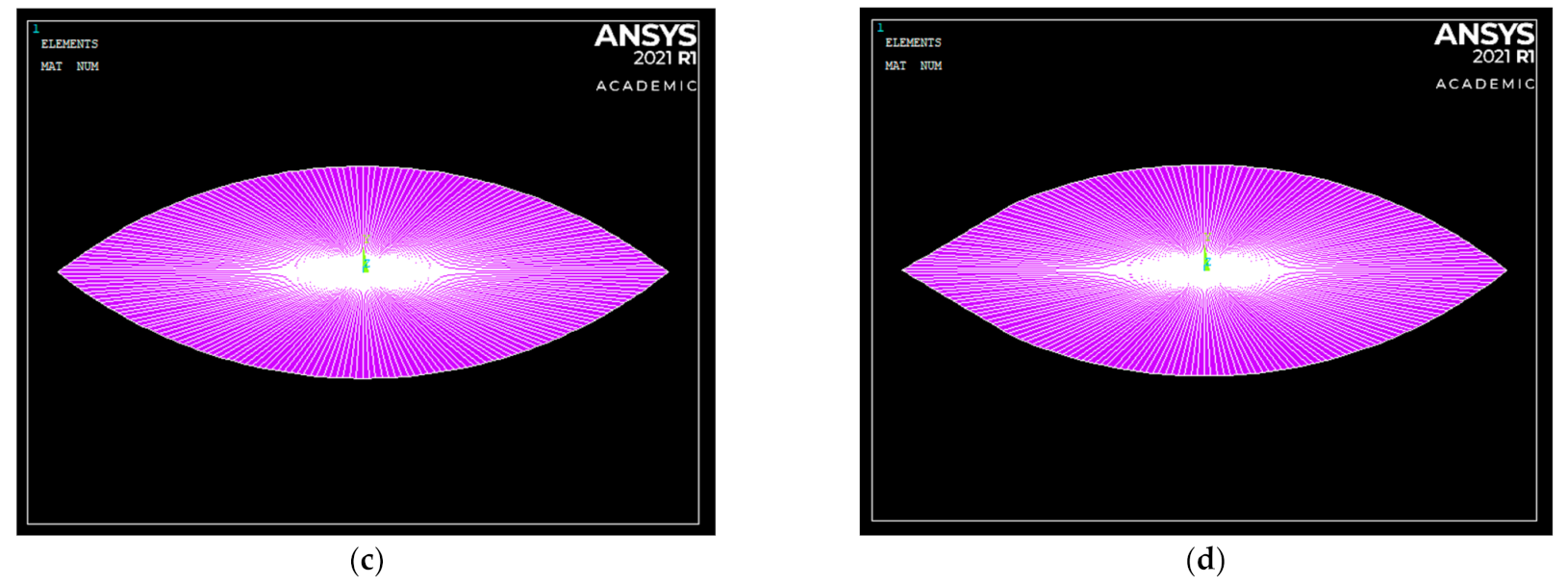
To perform our analysis of the HASEL actuators, we will be comparing the zipping mechanism with the sliding mechanism, as one represents a normal force driven system (the zipping mechanism), and the other represents a tangent force driven system (the sliding mechanism). We were able to model the geometry of the structural elements, the light blue elements in
Figure 20a,b outlining the structure of the HASEL pouch, and the transducer elements (non-structural) that represent the electrostatic forces, the red elements in
Figure 20a,b, with the properties of BOPP film and mineral oil shown in
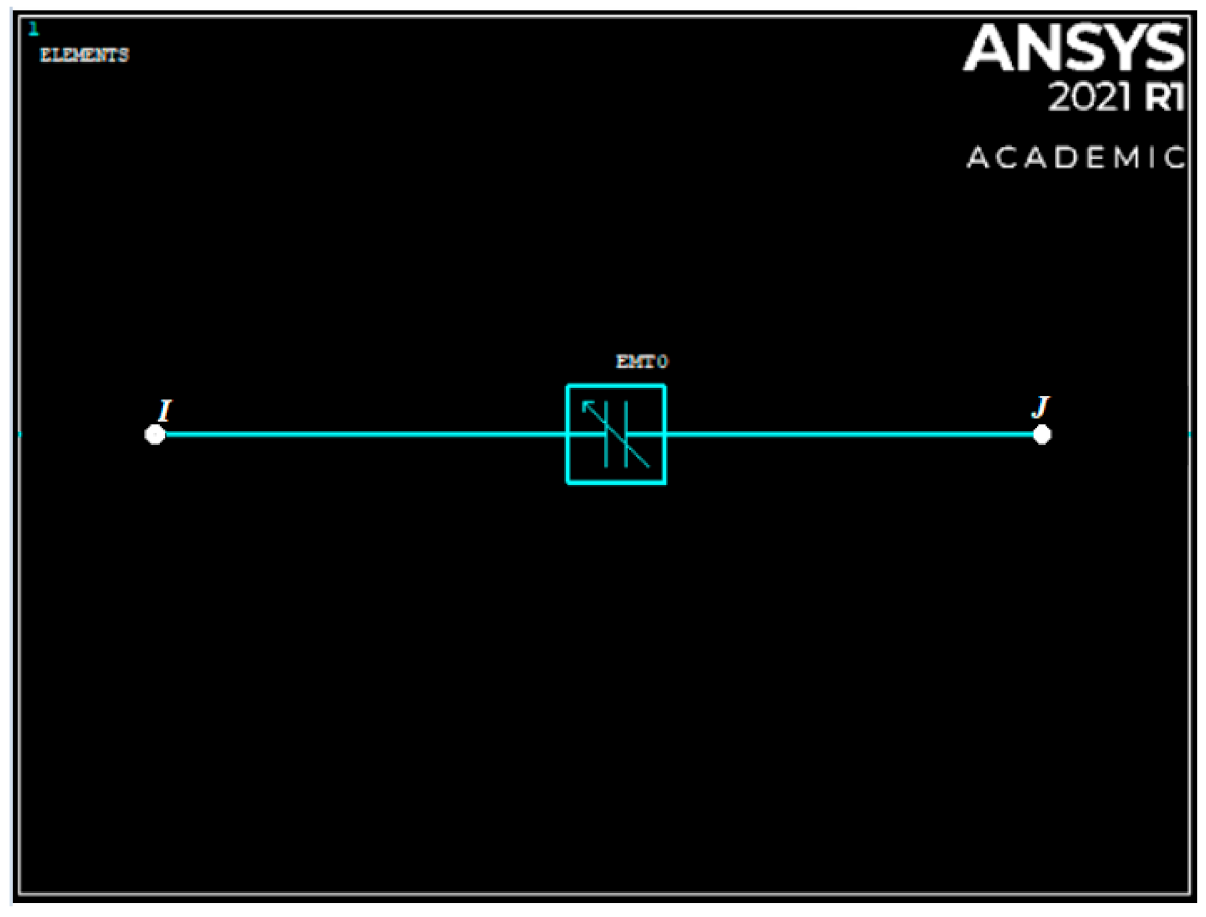
Table 2. The sliding mechanism model in
Figure 20a has one transducer element (TRANS126) that represents the capacitance between the integrated electrodes and produces a force which displacements the pouch based on the voltage difference between nodes ‘i’ and ‘j’, as shown in
Figure 16. With this TRANS126 element, we can also set the maximum amount of displacement the nodes of the element can achieve before the electrodes have contacted each other. Thus, there is no need to model the electrode structurally at all as it is fully represented with the one TRANS126 element (see
Figure 20a). The zipping mechanism, on the other hand, in
Figure 20b, requires an array of transducer elements as its capacitance varies as the distance between the electrodes varies. The hydrostatic element HSFLD241 can be seen in
Figure 20c,d, shown in purple. For the zipping mechanism in
Figure 20b,d, we can see that the curved geometry of the pouch has been straightened where the transducer elements are located so that we can reduce the bending required of beam elements before contact between electrodes has been made so that the model can converge easier, the voltage was also varied across the electrode to avoid penetration due to excessive forces. For our analysis, we assumed that a free strain load (zero opposing forces) is attached to the end node on the right of the image shown in
Figure 20a,b, which we will refer to as the load node.
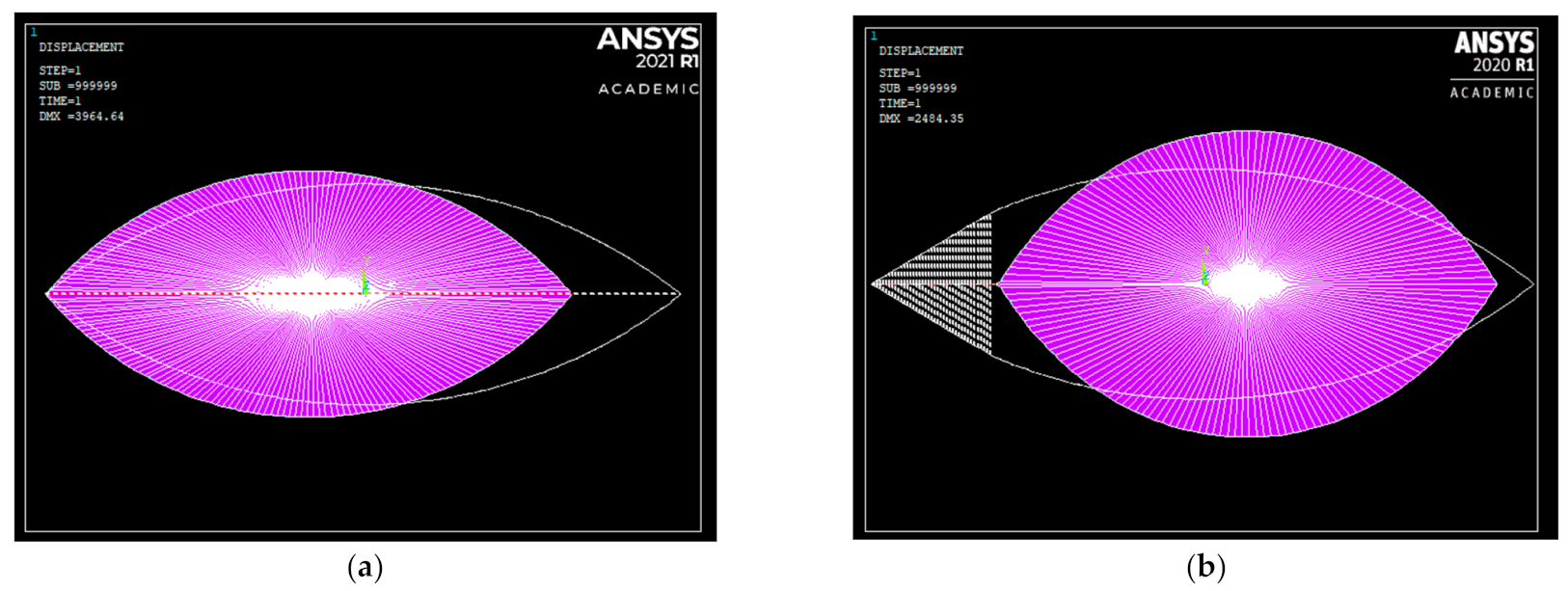
With the post-FEM analysis displacement overlapped over the pre-strain in
Figure 21, we can observe that the sliding mechanism has a higher displacement then the zipping mechanism in terms of where the assumed load would be attached at the end of the pouch shown in
Figure 20a,b. The zipping mechanism seems to have a lot of displacement in areas that are not at the region where the load is. To see where this displacement has been distributed throughout the pouch, we can analyze the following contour displacement plot of our FEM analyze.
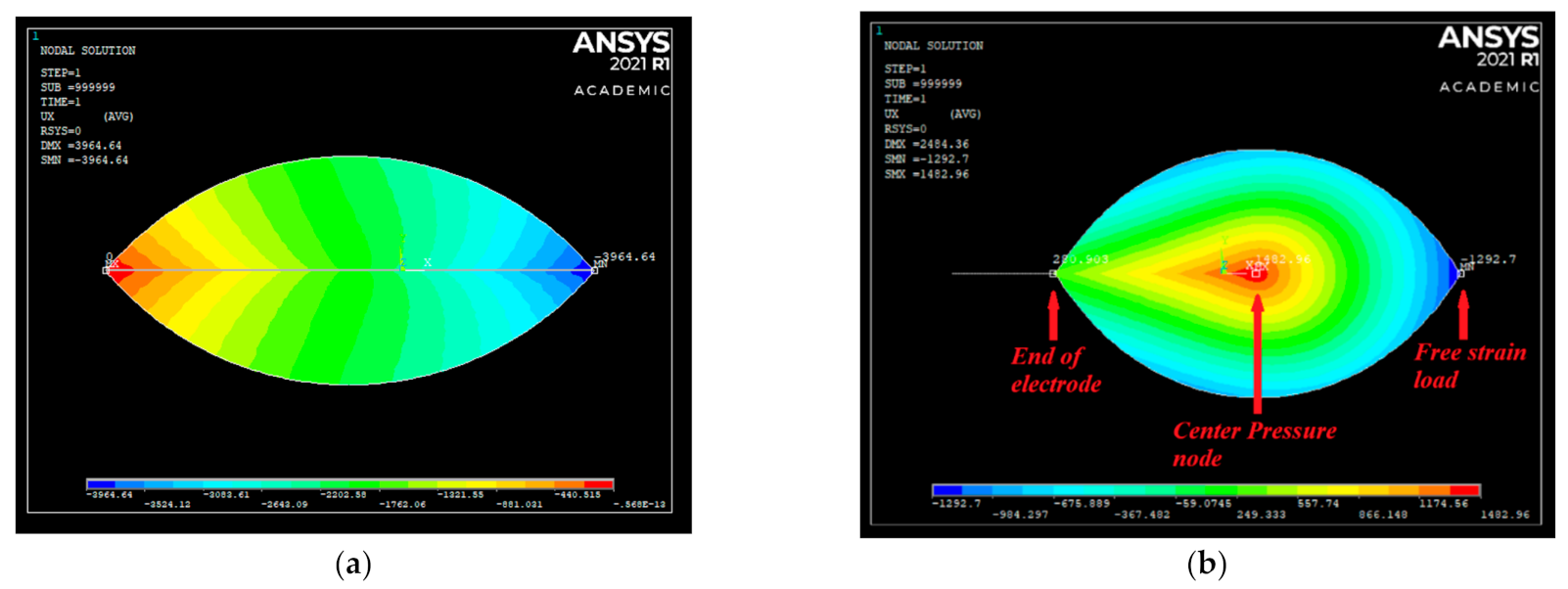
The first contour plot in
Figure 22 shows the ‘x’ component of the displacement (which is from right to left) throughout the pouch structure. For the sliding mechanism in
Figure 22a, the highest negative displacement was −3964.96 µm, shown in dark blue, and the highest positive displacement was 0 µm, shown in red. As we can see, the primary electrostatic displacement, and all the strain produced by the TRANS126 element, is contracting in the same direction as the secondary hydrostatic strain. This clearly demonstrates the importance of a good coupling between the primary electrostatic forces and the secondary hydraulic forces as, firstly, the highest displacement is at the load point node; secondly, there is zero strain going in the direction opposite the displacement at the load; and, thirdly, there is a uniform transmission of hydrostatic force throughout the structure from the highest to lowest displacements. With the displacement at the load node and the initial chord length of the arc, which is 23178 µm, we can calculate the strain to be −17.11%, where the negative sign demonstrates contraction.
With the zipping mechanism in
Figure 22b, we can see that the highest negative displacement is −1292.7 µm, shown in dark blue, which is located at the node where our assumed load is attached, and the highest positive displacement is 1482.96 µm, shown in red, which is located at the center pressure node (the ‘L’ node in
Figure 15) at the center of the HSFLD241 elements. There is also a third nodal displacement to consider, which is the pair of nodes at the end of the array of transducer elements at the end of the electrode, which has a nodal displacement of 280.903 µm. This node is important to consider because it is the node where the effect primary electrostatic force is most evident. If we observe the displacement, in
Figure 22b, between these end transducer nodes and the center pressure node, as well as the area surrounding these nodes, all the displacement is in the positive direction (where positive displacement is shown in the contour color band from the light green region to the red region). From this, we can assume that there is a positive primary electrostatic force producing a secondary hydraulic force that is extending the actuator between the transducer nodes and the pressure node. On the other hand, there is a negative displacement at the exterior of the pouch, which reaches it maximum negative displacement at the load node (where negative displacement is shown in the contour color band from the aqua region to the dark blue region). We can assume that this is due to the positive hydraulic force no longer being able to push the incompressible fluid in the enclosed structure, to the end of the load, and the fluid must push to the top and bottom of the non-stretchable pouch, resulting in a net negative displacement between the pressure node and the load node. We can assume that this is the negative secondary hydraulic force that is contracting the actuator in the opposite direction of the primary electrostatic force. This clearly demonstrates the effect of poor coupling between the primary electrostatic and secondary hydraulic forces as, on the one hand, we have a strain of 6.40% expansion in the region where primary and secondary forces are in the same direction, between the end transducer nodes and the pressure node, and we also have a strain of −5.58% contraction where the primary and secondary forces oppose one another, between the pressure node and the load node, reducing the net force and strain transmitted to the load by the primary electrostatic load applied.
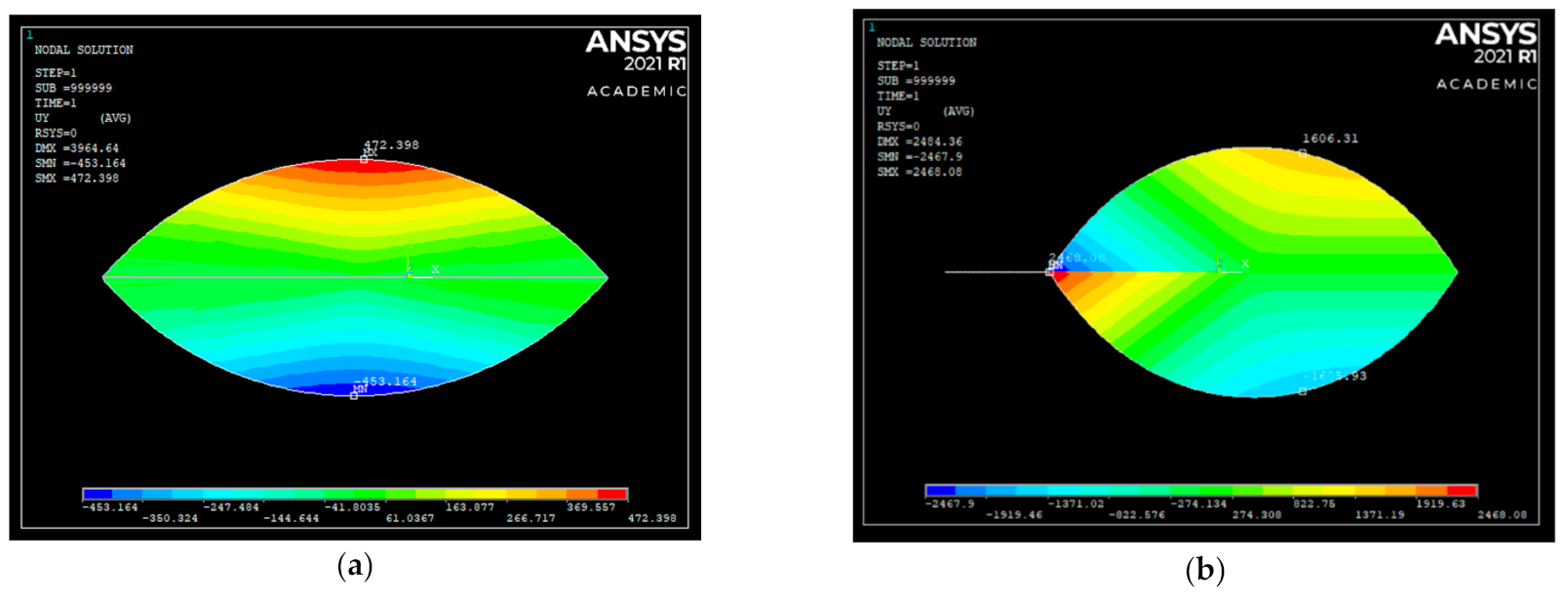
Analyzing the FEM contour plot in the ‘y’ direction shows us the displacement of the actuator in direction orthogonal to the load. The sliding mechanism in
Figure 23a has its highest positive displacement of 472.4 µm (shown in red), which is approximately the same as the highest negative displacement of −453.164 µm (shown in dark blue). Much like the ‘x’ contour displacement, even though the displacements are in the opposite direction, they are both pushing away; hence, both of the secondary hydrostatic forces are producing a strain that extends the pouch in the ‘y’ plain, thus demonstrating a good coupling of primary and secondary forces. The final strain is a 11.5% expansion, where the initial length was 8048 µm. With the zipping mechanism in
Figure 23b, the displacement seems to be separated into two sites where the displacement occurs. The primary electrostatic contraction site opposes the secondary hydraulic expansion, though, once again, the hydrostatic contraction around the electrode, ±2468.08 µm, is much higher than the hydrostatic expansion at the top and bottom of the pouch, ±1606.31 µm (where ± is the displacement at the top and bottom electrodes and pouch region). Though this is much higher than the displacement of the sliding mechanism, the fact that the contraction associated with contraction, −61.33%, site is much higher then the expansion site, 39.91%, that the load is often attached to (like with the donut, the dimple, and quadrant HASEL actuator, if you can image this geometry revolved about the electrode), we can see that coupling of primary and secondary forces can be improved upon.
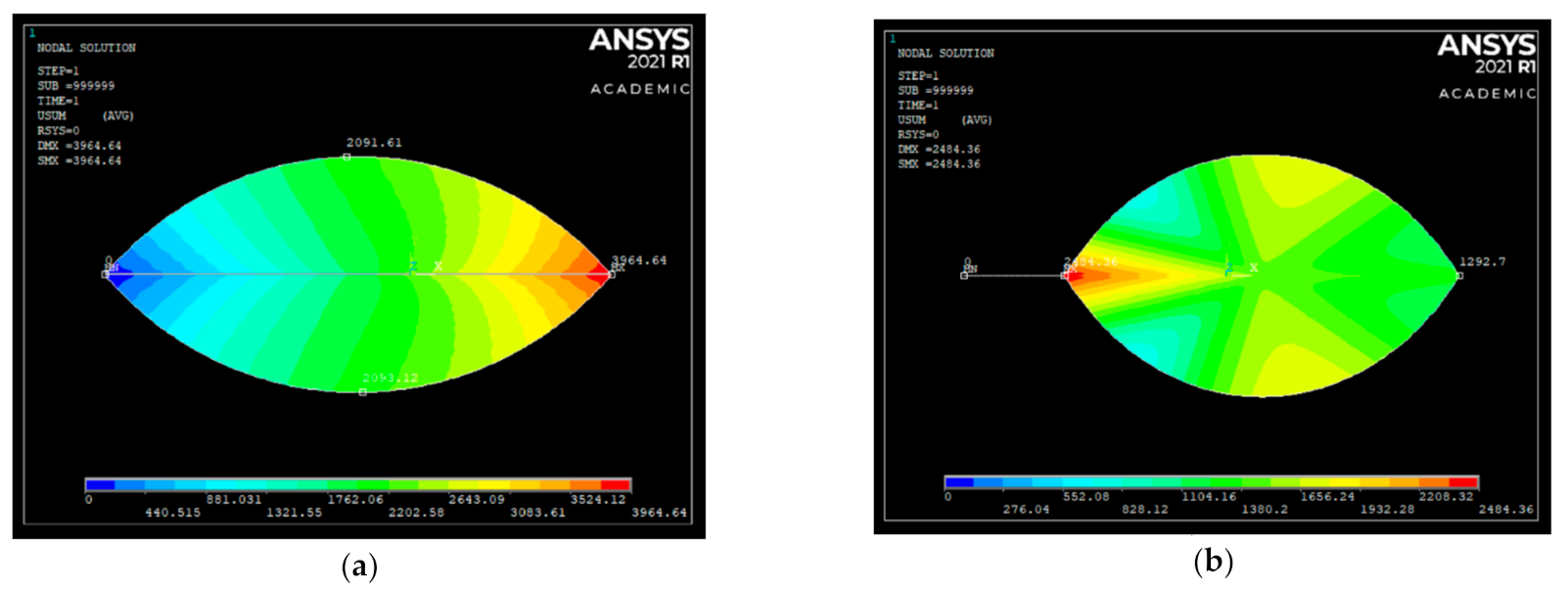
When we look at the absolute sum of all the displacement, we can see that all the displacement in the sliding mechanism is at the free strain load in
Figure 24a with the maximum displacement being 3964.64 µm. This is as opposed to the zipping mechanism, which has the maximum displacement being 2484.36 µm at the end of the electrode, and displacement at the load was only 1292.7 µm, half the maximum displacement of the pouch. This once again highlights the main issue with the zipping design and its external compartmentalized design.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}