
Effects of Trailing Edge Deflections Driven by Shape Memory Alloy Actuators on the Transonic Aerodynamic Characteristics of a Super Critical Airfoil

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Mechanic Modeling and Test of Shape Memory Alloy
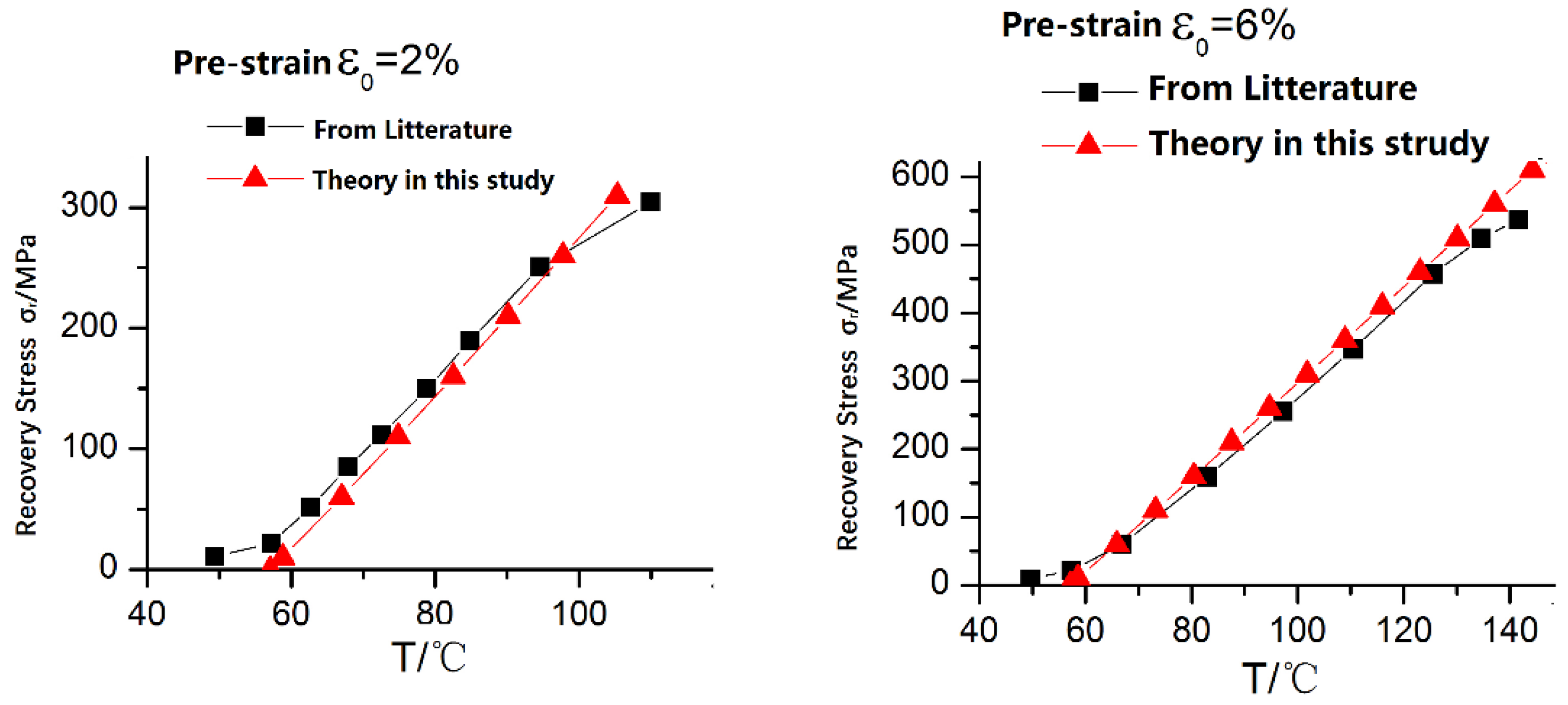
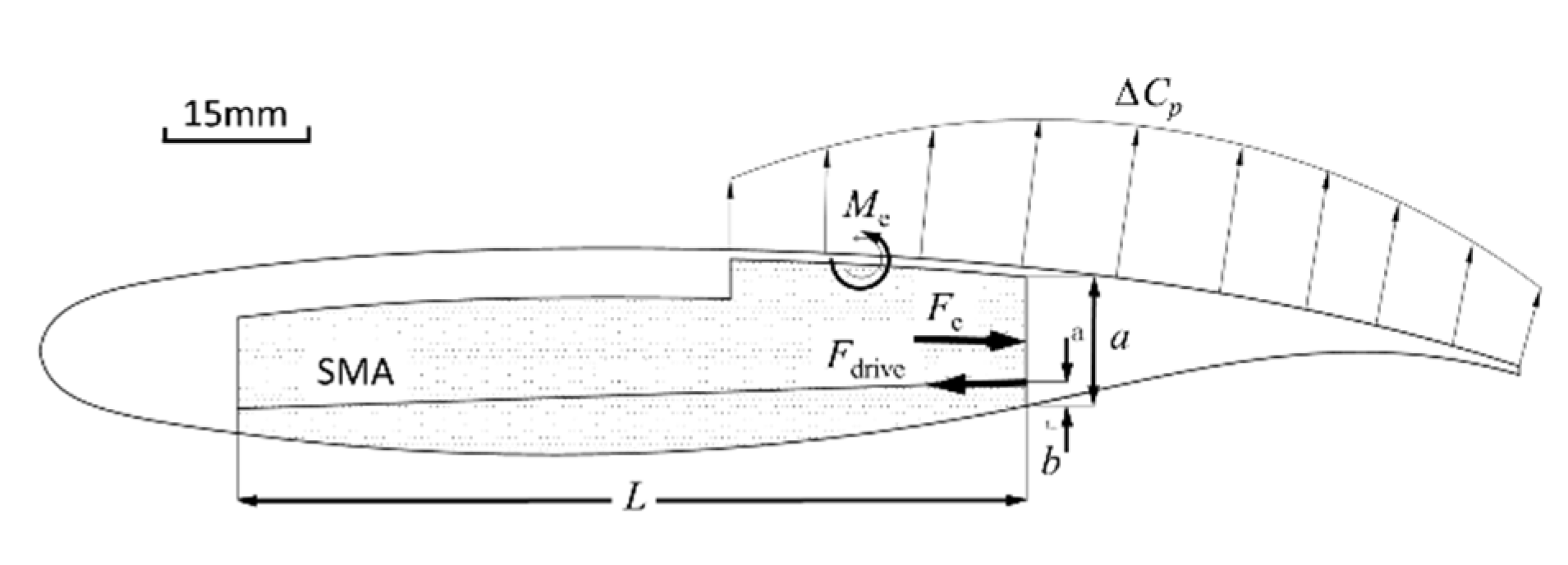
2.1. Theoretical Model of the SMA Actuator
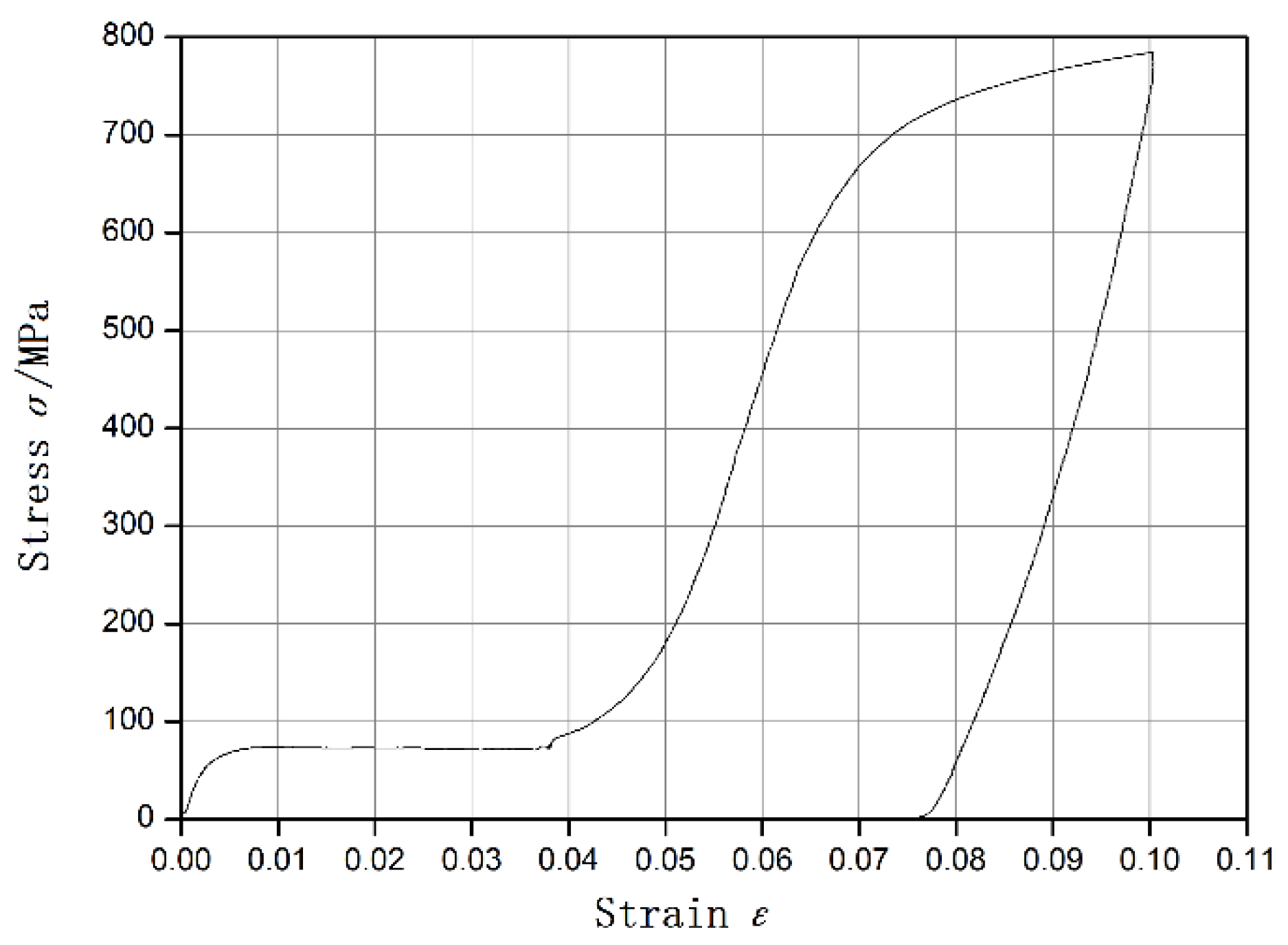
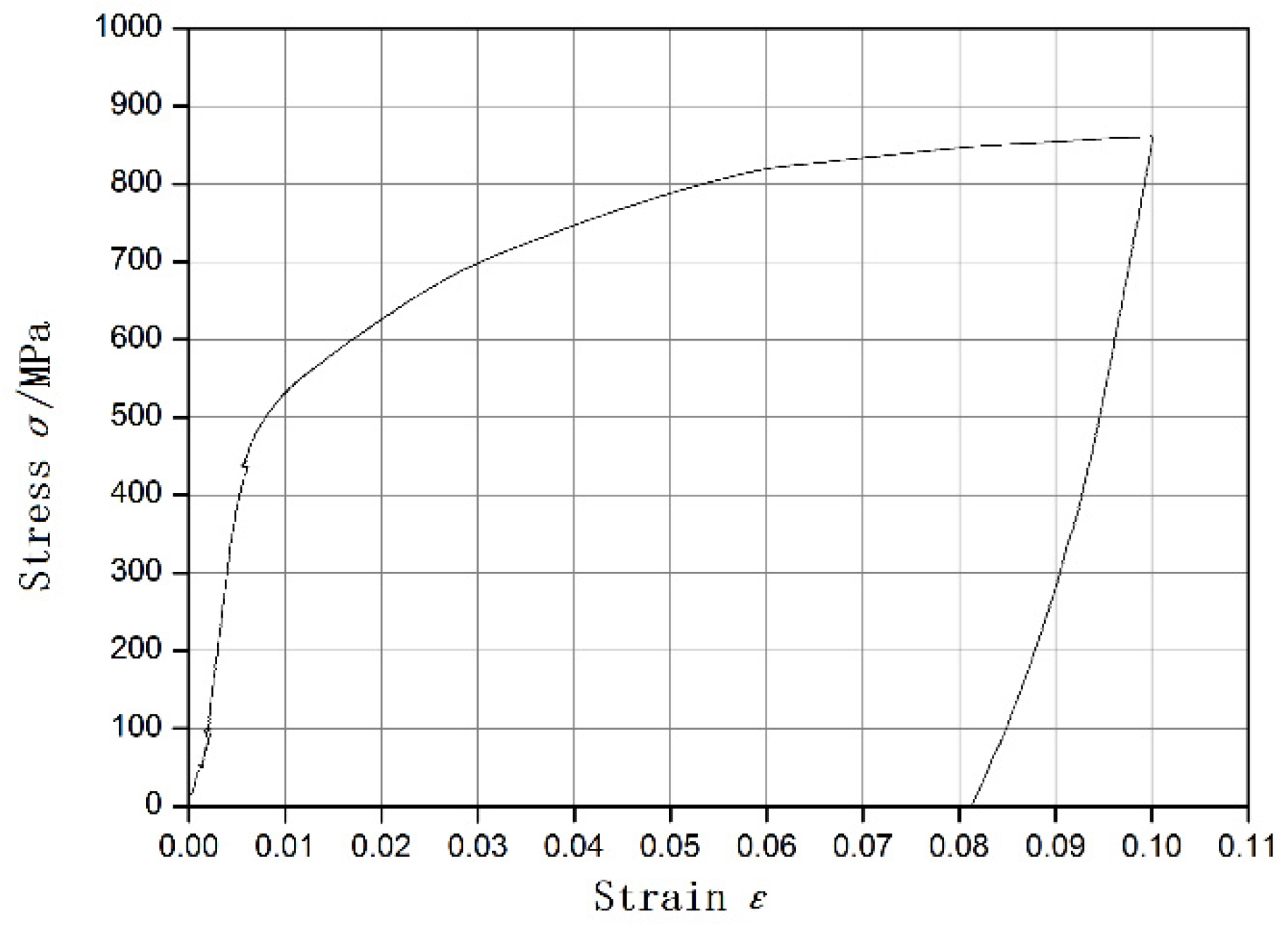
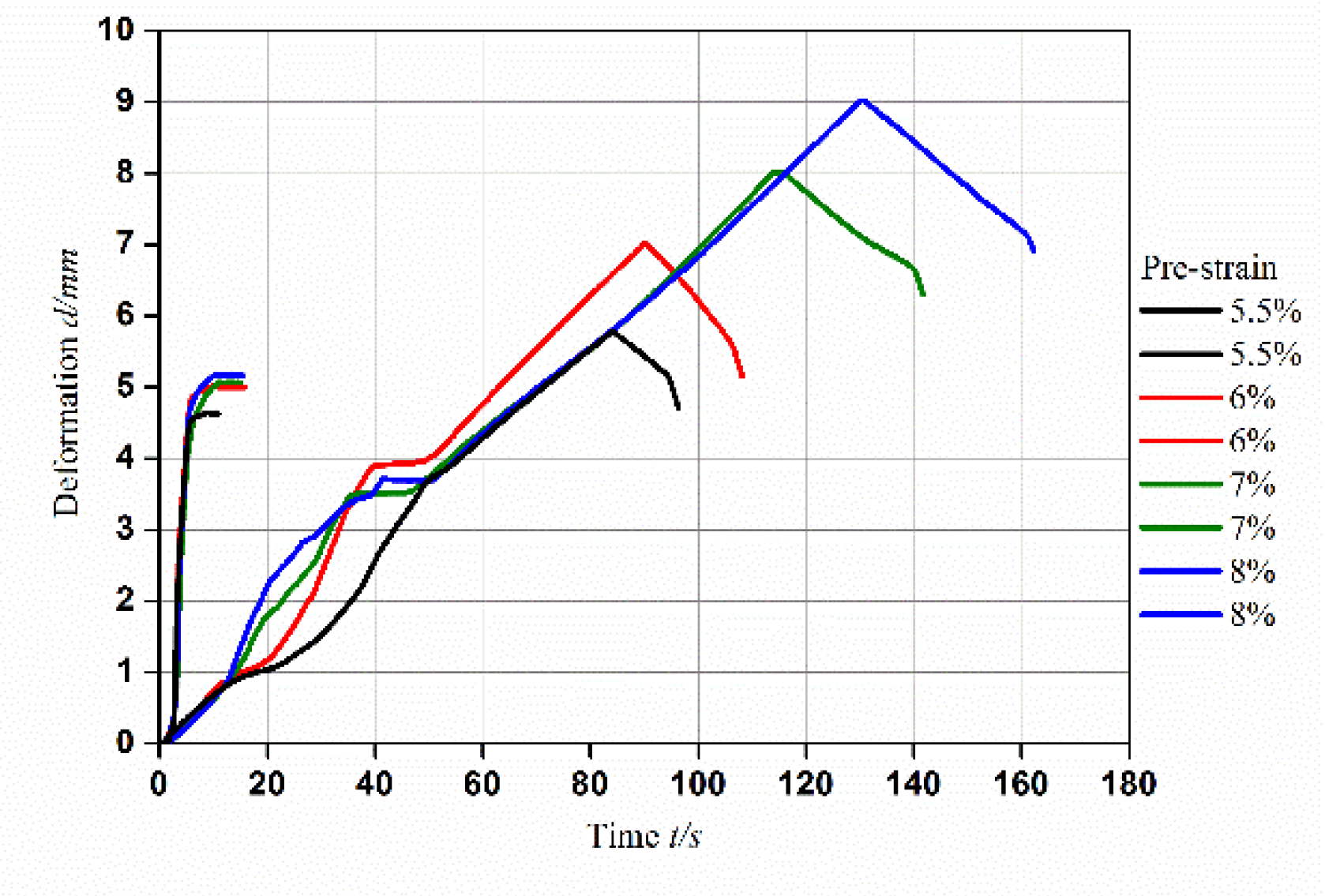
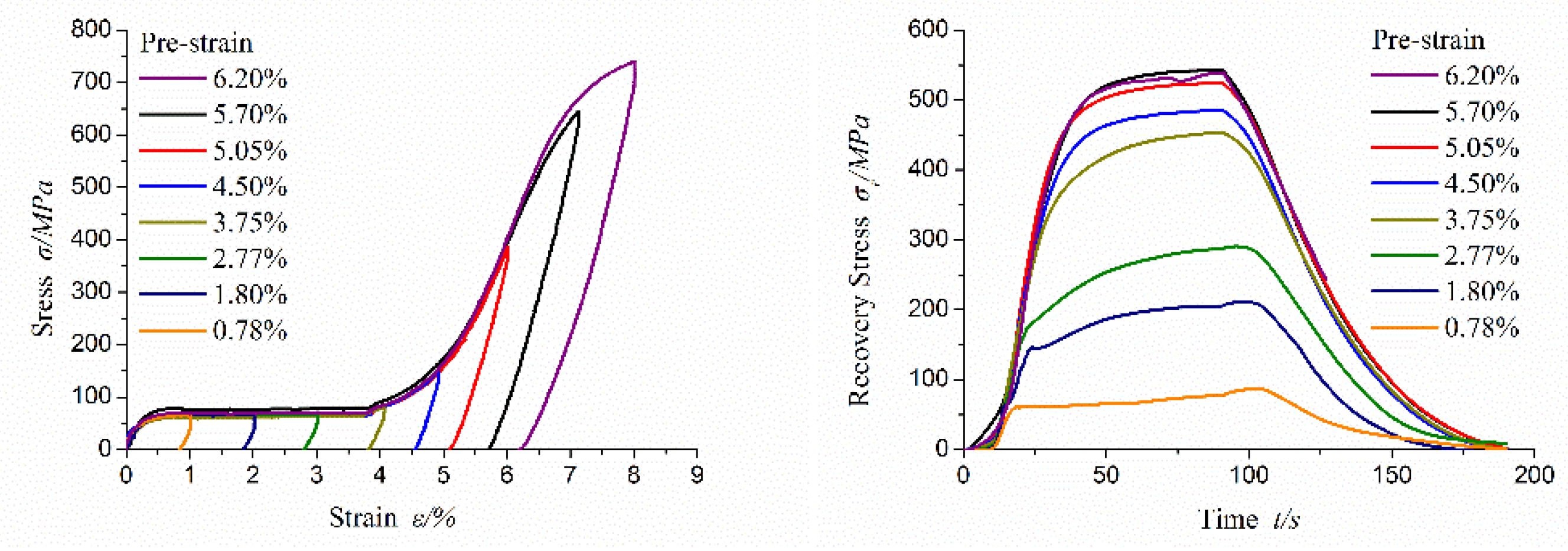
2.2. SMA Performance Test
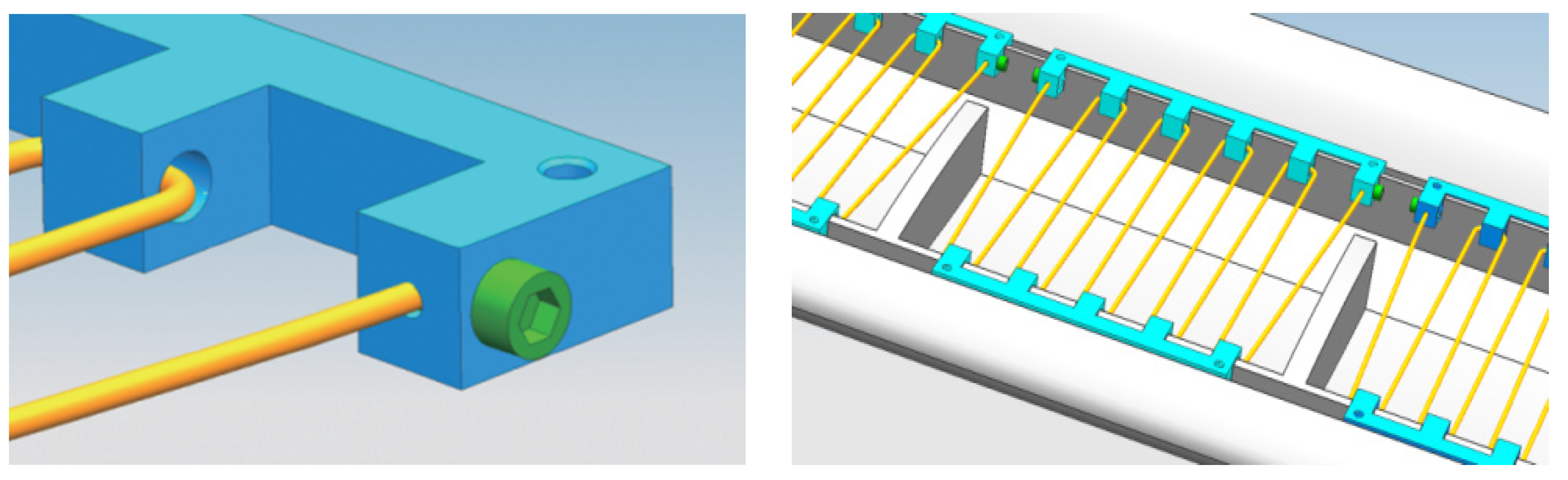
3. Design of the Smart Structure
4. Effects of the Airfoil Trailing Edge Deflection on the Aerodynamic Characteristics
4.1. Test Facilities
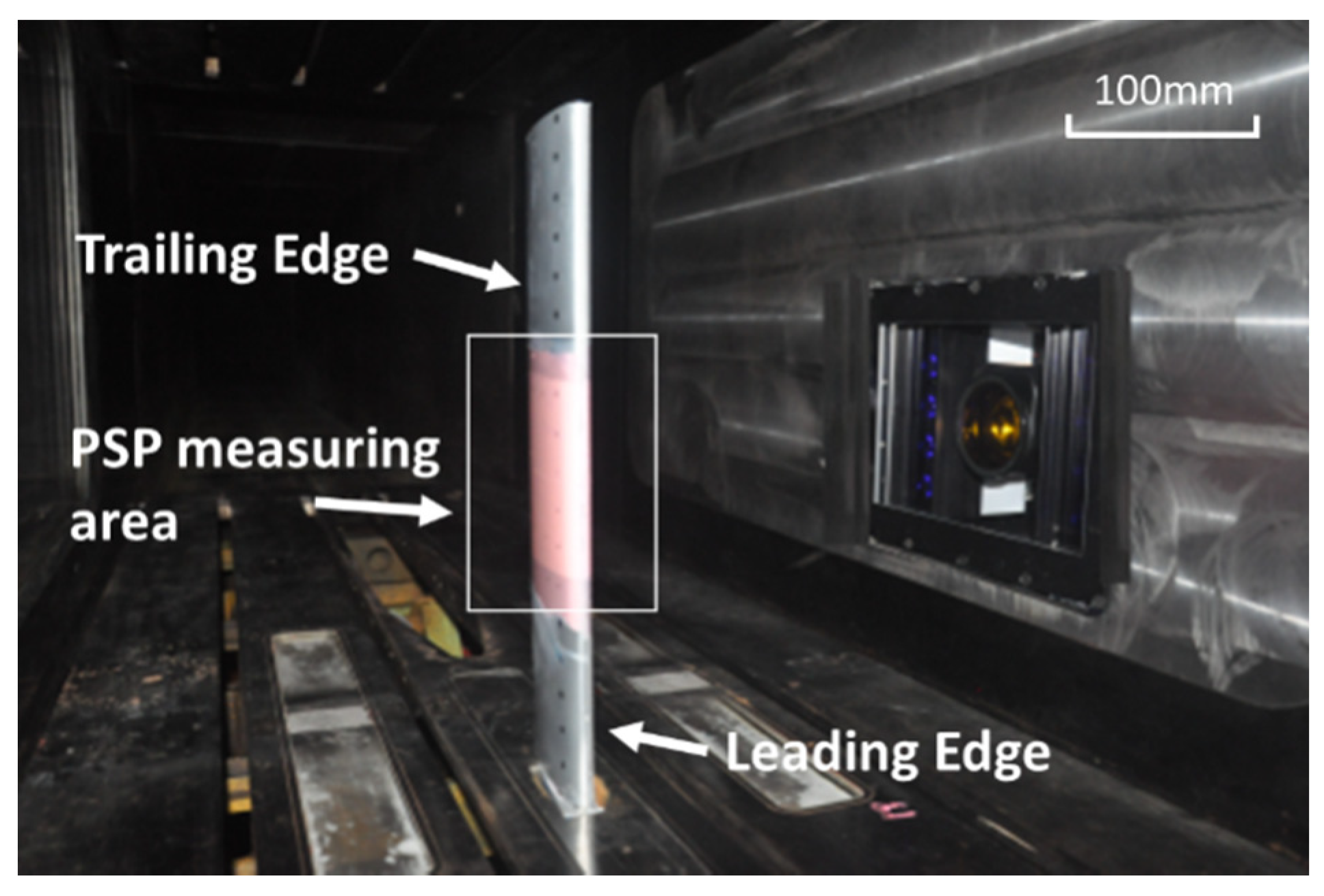
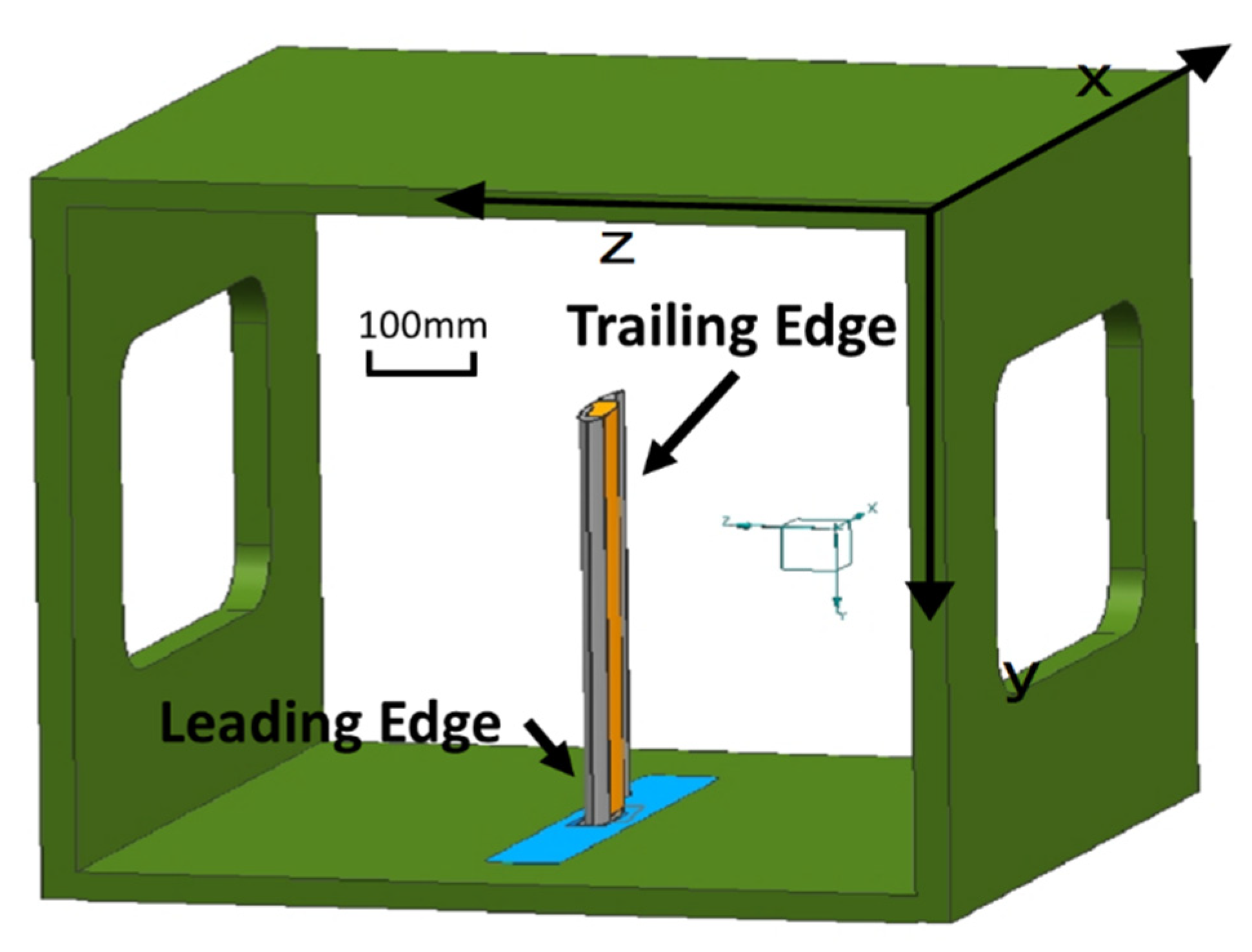
4.2. Model Setup
4.3. Test Content
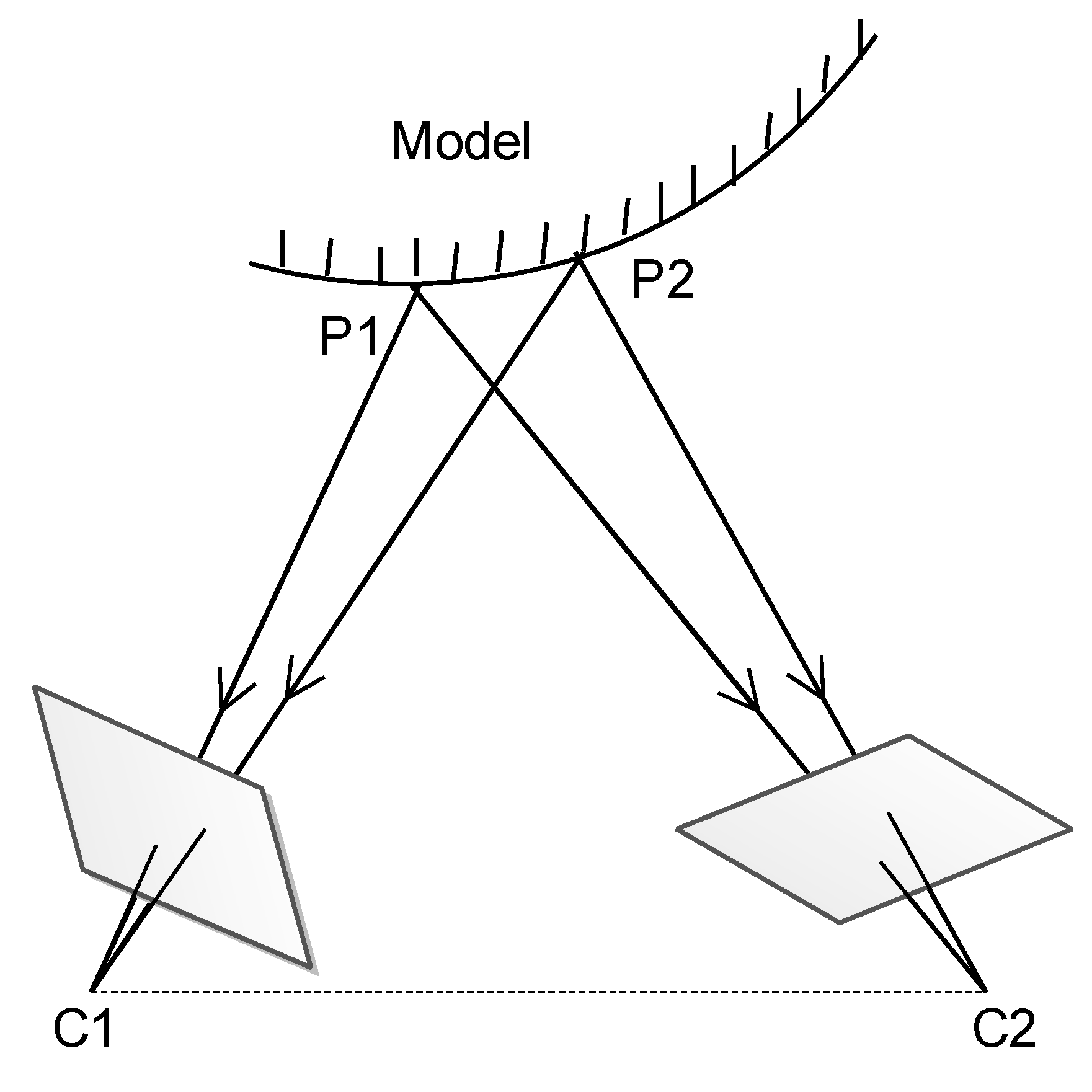
4.4. Instrumentation
4.5. Results and Discussions
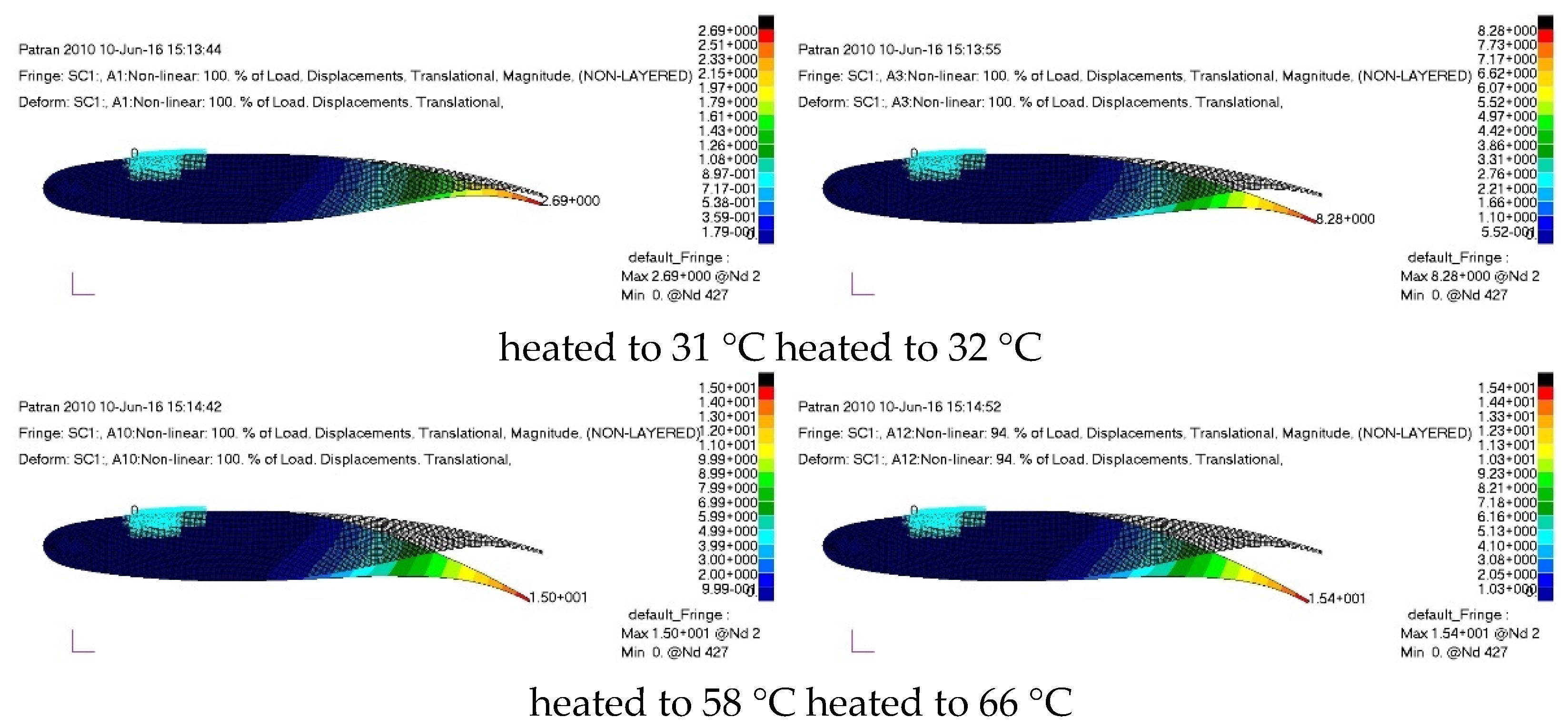
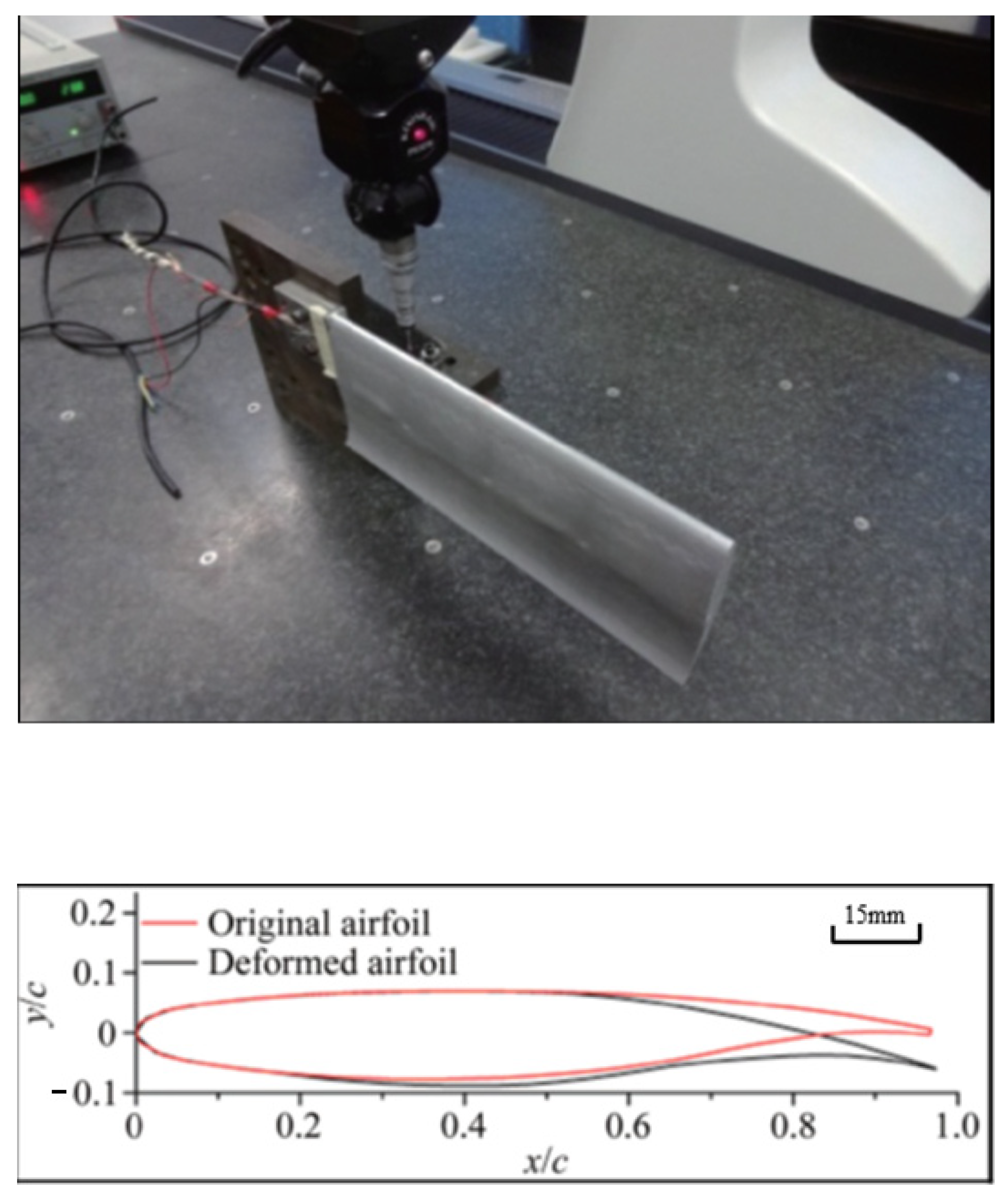
4.5.1. Computation of Trailing Edge Deflection Angle
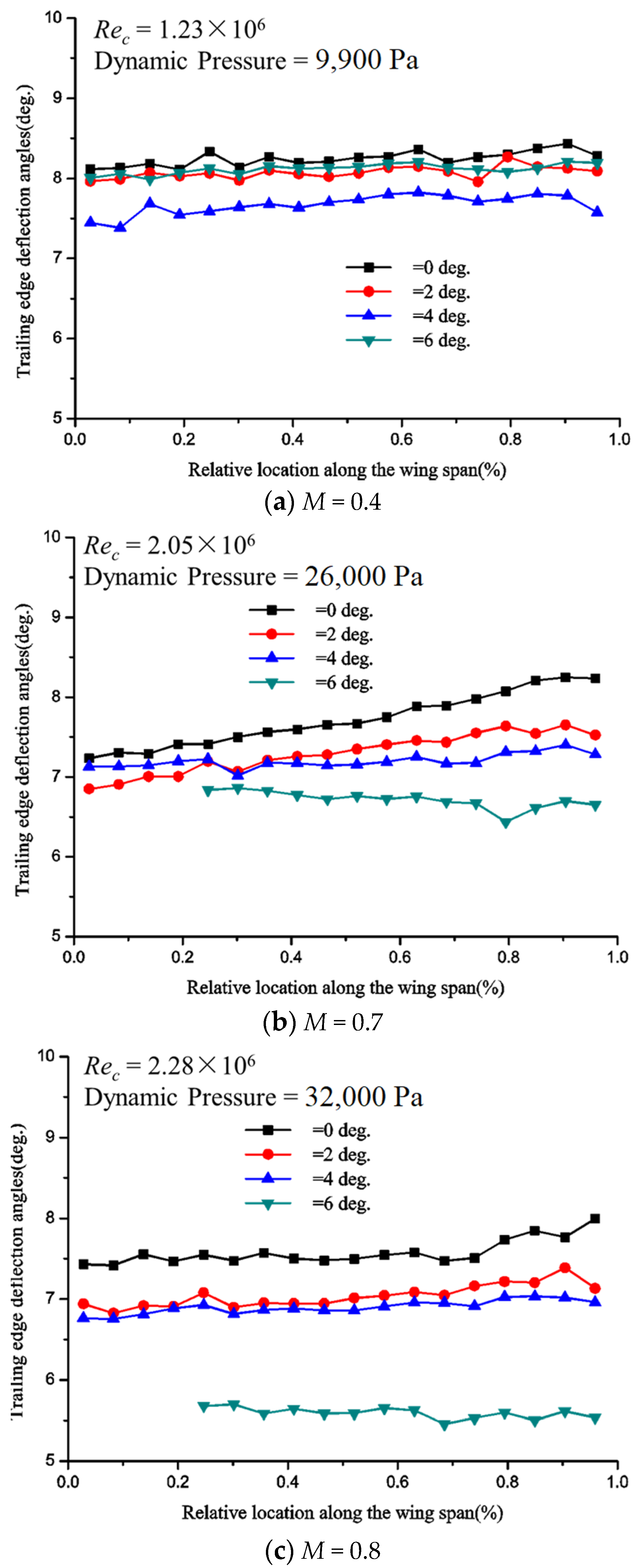
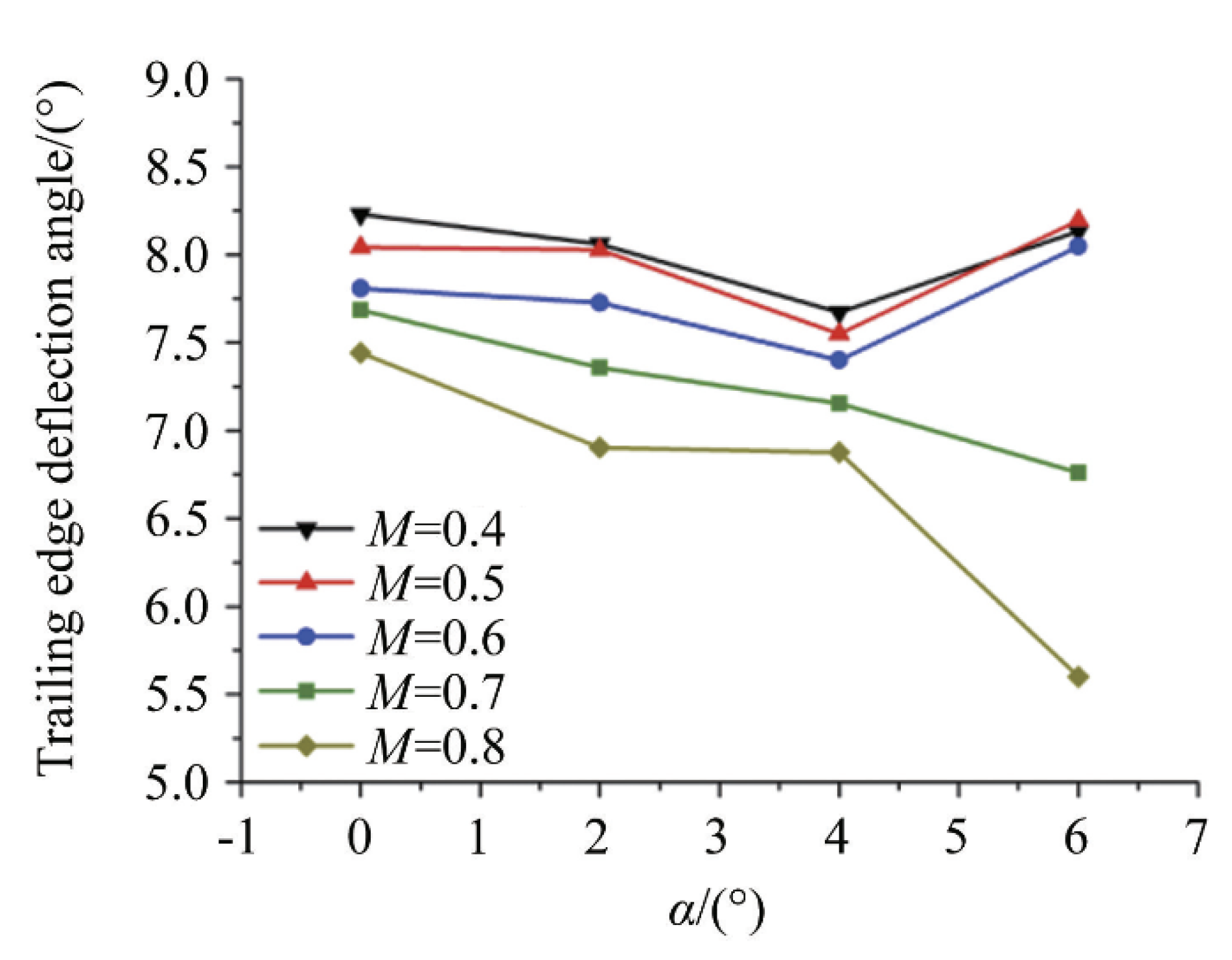
4.5.2. Effects of Mach Number and Angles of Attack on Trailing Edge Deflection
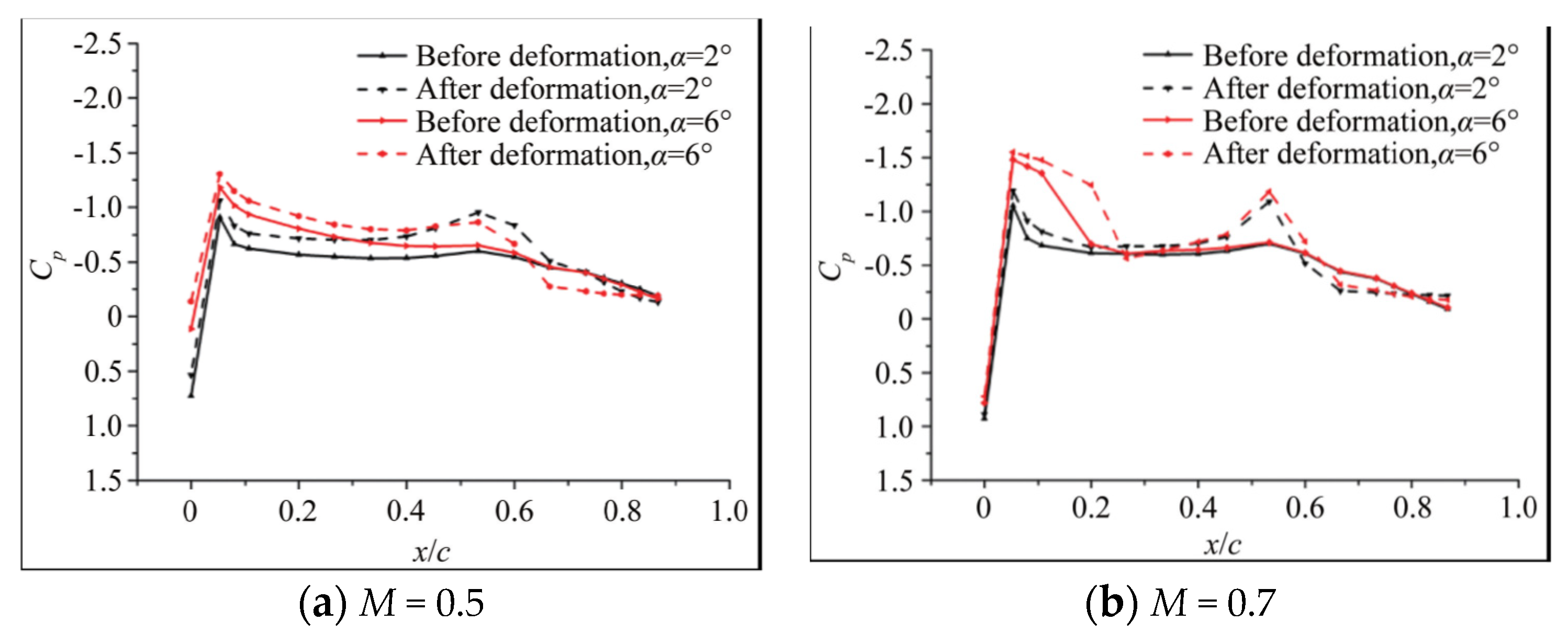
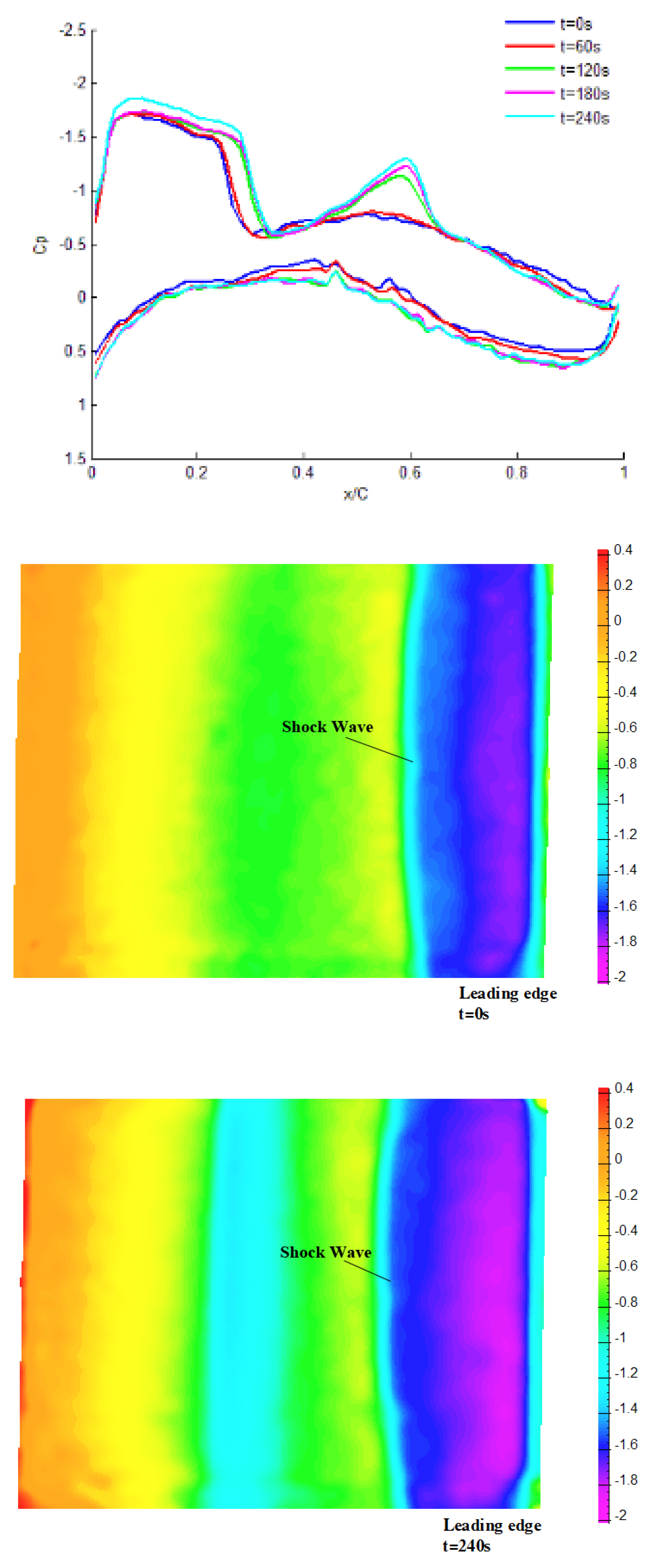
4.5.3. Effect of Trailing Edge Deflection on Pressure Distribution over the Model
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kudva, J.N. Overview of the DARPA Smart Wing Project. J. Intell. Mater. Syst. Struct. 2004, 15, 261–267. [Google Scholar] [CrossRef]
- Bye, D.R.; McClure, P.D. Design of a Morphing Vehicle. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Honolulu, HI, USA, 23–26 April 2007. [Google Scholar]
- Ivanco, T.; Scott, R.; Love, M.; Zink, S.; Weisshaar, T. Validation of the Lockheed Martin Morphing Concept with Wind Tunnel Testing. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Honolulu, HI, USA, 23–26 April 2007. [Google Scholar]
- Flanagan, J.; Strutzenberg, R.; Myers, R.; Rodrian, J. Development and flight testing of a morphing aircraft, the NextGen MFX-1. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Honolulu, HI, USA, 23–26 April 2007. [Google Scholar]
- Bowman, J.; Sanders, B.; Cannon, B.; Kudva, J.; Joshi, S.; Weisshaar, T. Development of Next Generation Morphing Aircraft Structures. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Honolulu, HI, USA, 23–26 April 2007. [Google Scholar]
- Nathan, P.; Marat, M.; Eli, L. Design, Construction, and Tests of an Aeroelastic Wind Tunnel Model of a Variable Camber Continuous Trailing Edge Flap (VCCTEF) Concept Wing. In Proceedings of the 32nd AIAA Applied Aerodynamics Conference, Atlanta, GA, USA, 16–20 June 2014. [Google Scholar]
- Nathan, P.; Marat, M.; Eli, L. The Design, Construction, and Tests of a Concept Aeroelastic Wind Tunnel Model of a High-Lift Variable Camber Continuous Trailing Edge Flap (HLVCCTEF) Wing configuration. In Proceedings of the 56th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar]
- Coutu, D.; Brailovski, V.; Terriault, P. Optimized design of an active extrados structure for an experimental morphing laminar wing. Aerosp. Technol. 2010, 14, 451–458. [Google Scholar] [CrossRef]
- Wlezien, R.W.; Horner, G.C.; McGowan AM, R.; Padula, S.L.; Scott, M.A.; Silcox, R.J.; Harrison, J.S. Aircraft morphing program. In Proceedings of the 5th Annual International Symposium on Smart Structures and Materials, San Diego, CA, USA, 1–5 March 1998; pp. 176–187. [Google Scholar]
- Kudva, J.N.; Jardine, A.P.; Martin, C.A.; Appa, K. Overview of the ARPA/WL smart structures and materials development-smart wing contract. In Proceedings of the 1996 Symposium on Smart Structures and Materials, International Society for Optics and Photonics, San Diego, CA, USA, 25–29 February 1996. [Google Scholar]
- Martin, C.A.; Jasmin, L.; Flanagan, J.S.; Appa, K.; Kudva, J.N. Smart wing wind tunnel model design. In Proceedings of the Smart Structures and Materials 1997: Industrial and Commercial Applications of Smart Structures Technologies, San Diego, CA, USA, 3–6 March 1997; Volume 3044, pp. 41–47. [Google Scholar]
- Scherer, L.B.; Martin, C.A.; Appa, K.; Kudva, J.N.; West, M.N. Smart wing wind tunnel test results. In Proceedings of the Smart Structures and Materials 1997: Industrial and Commercial Applications of Smart Structures Technologies, San Diego, CA, USA, 3–6 March 1997; pp. 56–66. [Google Scholar]
- Scherer, L.B.; Martin, C.A.; West, M.N.; Florance, J.P.; Wieseman, C.D.; Burner, A.W.; Fleming, G.A. DARPA/ARFL/ NASA Smart Wing second wind tunnel test results. In Proceedings of the 1999 Symposium on Smart Structures and Materials, International Society for Optics and Photonics, Newport Beach, CA, USA, 1 March 1999; pp. 249–259. [Google Scholar]
- Ting, E.; Dao, T.; Nguyen, N. Aerodynamic load analysis of a variable camber continuous trailing edge flap system on a flexible wing aircraft. In Proceedings of the 56th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.; Bai, P.; Ying, W.L.; Leng, J.S.; Zhan, H.L.; Liu, Z.Q. Analysis on the aerodynamic characteristics of variable camber airfoils with continuous smooth morphing trailing edge. Acta Aerodyn. Sin. 2010, 28, 46–53. [Google Scholar]
- Yang, Y.; Xu, Z.W. Research of the wing structure based on a shape-memory alloy actuated morphing wing. Ordnance Mater. Sci. Eng. 2010, 33, 25–30. [Google Scholar]
- Liang, C.; Rogers, C.A. One-Dimensional Thermomechanical Constitute Relations for Shape Memory Materials. J. Intell. Mater. Syst. Struct. 1997, 84, 285–302. [Google Scholar] [CrossRef]
- Xing, T.; Zheng, Y.; Cui, L. Recovery stress characteristics of TiNi alloy wires after partial martensitic transformation under different constraint conditions. Trans. Nonferrous Met. Soc. China 2005, 15, 336–339. [Google Scholar]
- Tanaka, K.A. A thermomechanical sketch of shape memory effect: One-dimensional tensile behavior. Res. Mech. 1986, 18, 251–263. [Google Scholar]
- Tang, W.; Sandstrom, R. Limitations of Constitutive Relations for TiNi Shape Memory Alloys. J. Phys. 1995, 5, 185–190. [Google Scholar] [CrossRef] [Green Version]
- Dong, E. Research on Realization Mechanism and Some Key Technologies of Smart Morphing Aircraft Structures. Ph.D. Thesis, University of Science and Technology of China, Hefei, China, 2010. [Google Scholar]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, B.; Wang, Y.; Lei, P. Effects of Trailing Edge Deflections Driven by Shape Memory Alloy Actuators on the Transonic Aerodynamic Characteristics of a Super Critical Airfoil. Actuators 2021, 10, 160. https://0-doi-org.brum.beds.ac.uk/10.3390/act10070160
Lv B, Wang Y, Lei P. Effects of Trailing Edge Deflections Driven by Shape Memory Alloy Actuators on the Transonic Aerodynamic Characteristics of a Super Critical Airfoil. Actuators. 2021; 10(7):160. https://0-doi-org.brum.beds.ac.uk/10.3390/act10070160
Chicago/Turabian StyleLv, Binbin, Yuanjing Wang, and Pengxuan Lei. 2021. "Effects of Trailing Edge Deflections Driven by Shape Memory Alloy Actuators on the Transonic Aerodynamic Characteristics of a Super Critical Airfoil" Actuators 10, no. 7: 160. https://0-doi-org.brum.beds.ac.uk/10.3390/act10070160