
Soft Exoskeletons: Development, Requirements, and Challenges of the Last Decade

 ,
,  , , and
, , and
Abstract
:1. Introduction
2. General Applications
3. Requirements and Challenges in the Development of Soft Exoskeletons
4. Development of Soft Exoskeletons
4.1. Upper Limb Exoskeletons
4.1.1. Shoulder
4.1.2. Elbow
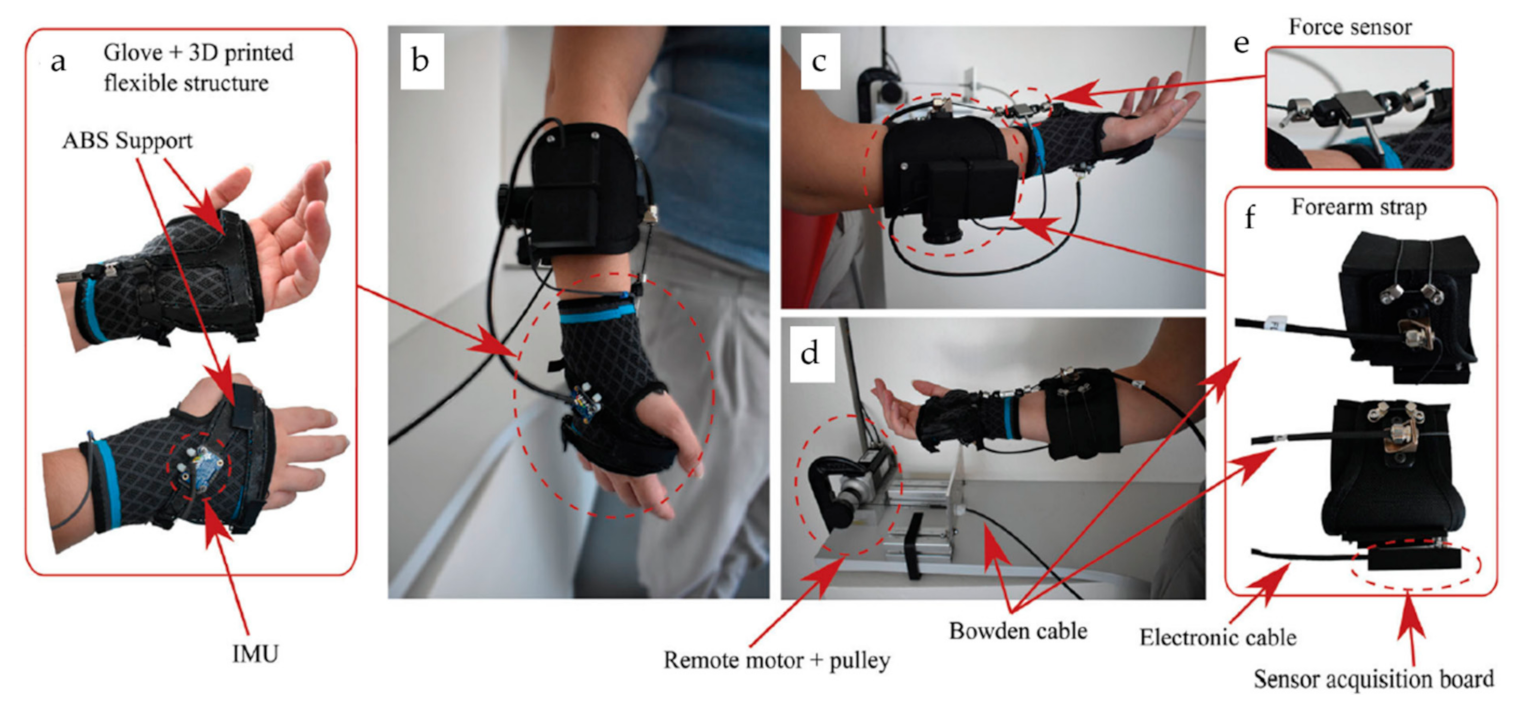
4.1.3. Wrist
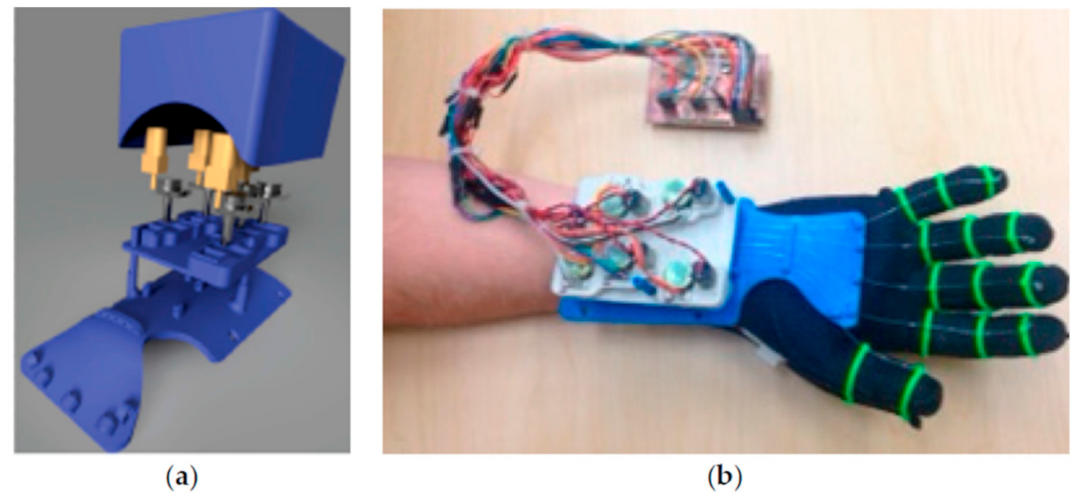
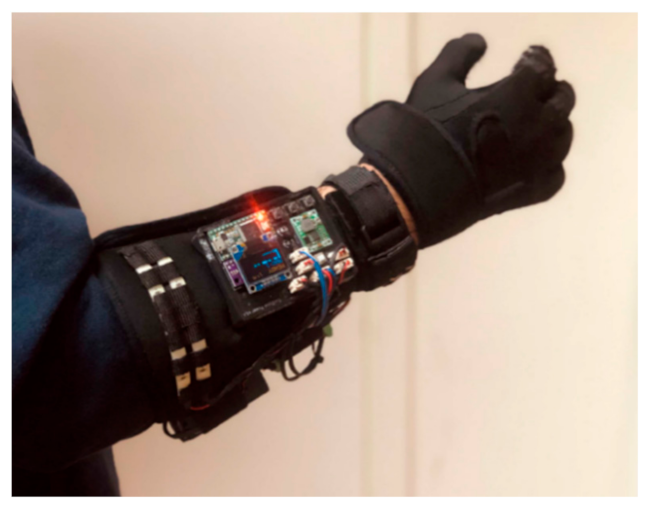
4.1.4. Hand
4.2. Lower Extremity Exoskeletons
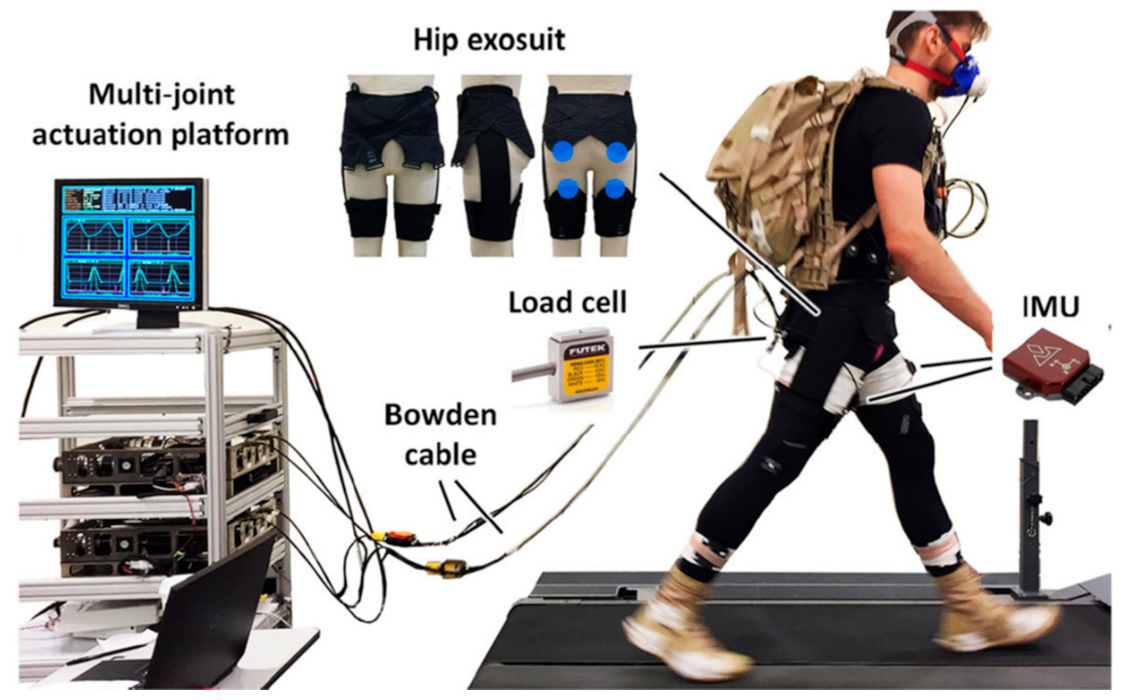
4.2.1. Hip
4.2.2. Knee
4.2.3. Ankle
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shahid, T.; Gouwanda, D.; Nurzaman, S.G.; Gopalai, A.A. Moving toward Soft Robotics: A Decade Review of the Design of Hand Exoskeletons. Biomimetics 2018, 3, 17. [Google Scholar] [CrossRef] [Green Version]
- Young, A.J.; Ferris, D.P. State of the Art and Future Directions for Lower Limb Robotic Exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 171–182. [Google Scholar] [CrossRef]
- Takahashi, N.; Takahashi, H.; Koike, H. Soft Exoskeleton Glove Enabling Force Feedback for Human-Like Finger Posture Control with 20 Degrees of Freedom. In Proceedings of the 2019 IEEE World Haptics Conference (WHC), Tokyo, Japan, 9–12 July 2019; pp. 217–222. [Google Scholar] [CrossRef]
- Yap, H.K.; Goh, J.C.H.; Yeow, R.C.H. Design and Characterization of Soft Actuator for Hand Rehabilitation Application. In Proceedings of the 6th European Conference of the International Federation for Medical and Biological Engineering, Dubrovnik, Croatia, 7–11 September 2014; Volume 45, pp. 367–370, ISBN 978-3-319-11127-8. [Google Scholar]
- Al-Fahaam, H.; Davis, S.; Nefti-Meziani, S. Wrist Rehabilitation Exoskeleton Robot Based on Pneumatic Soft Actuators. In Proceedings of the 2016 International Conference for Students on Applied Engineering (ICSAE), Newcastle Upon Tyne, UK, 20–21 October 2017; pp. 491–496. [Google Scholar] [CrossRef]
- Li, N.; Yang, T.; Yang, Y.; Yu, P.; Xue, X.; Zhao, X.; Song, G.; Elhajj, I.H.; Wang, W.; Xi, N.; et al. Bioinspired Musculoskeletal Model-Based Soft Wrist Exoskeleton for Stroke Rehabilitation. J. Bionic Eng. 2020, 17, 1163–1174. [Google Scholar] [CrossRef]
- Ismail, R.; Ariyanto, M.; Perkasa, I.A.; Adirianto, R.; Putri, F.T.; Glowacz, A.; Caesarendra, W. Soft Elbow Exoskeleton for Upper Limb Assistance Incorporating Dual Motor-Tendon Actuator. Electronics 2019, 8, 1184. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Wang, X.; Chen, B.; Wu, H. Design and Fuzzy Sliding Mode Admittance Control of a Soft Wearable Exoskeleton for Elbow Rehabilitation. IEEE Access 2018, 6, 60249–60263. [Google Scholar] [CrossRef]
- O’Neill, C.T.; Phipps, N.S.; Cappello, L.; Paganoni, S.; Walsh, C.J. A Soft Wearable Robot for the Shoulder: Design, Characterization, and Preliminary Testing. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 1672–1678. [Google Scholar]
- Kesner, S.B.; Jentoft, L.; Hammond, F.L.; Howe, R.D.; Popovic, M. Design Considerations for an Active Soft Orthotic System for Shoulder Rehabilitation. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 8130–8134. [Google Scholar] [CrossRef]
- Asbeck, A.T.; Schmidt, K.; Walsh, C.J. Soft Exosuit for Hip Assistance. Robot. Auton. Syst. 2015, 73, 102–110. [Google Scholar] [CrossRef]
- Chen, C.; Zhang, Y.; Li, Y.; Wang, Z.; Liu, Y.; Cao, W.; Wu, X. Iterative Learning Control for a Soft Exoskeleton with Hip and Knee Joint Assistance. Sensors 2020, 20, 4333. [Google Scholar] [CrossRef]
- Sridar, S.; Nguyen, P.H.; Zhu, M.; Lam, Q.P.; Polygerinos, P. Development of a Soft-Inflatable Exosuit for Knee Rehabilitation. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3722–3727. [Google Scholar] [CrossRef]
- Zhang, L.; Huang, Q.; Cai, K.; Wang, Z.; Wang, W.; Liu, J. A Wearable Soft Knee Exoskeleton Using Vacuum-Actuated Rotary Actuator. IEEE Access 2020, 8, 61311–61326. [Google Scholar] [CrossRef]
- Lee, S.; Crea, S.; Malcolm, P.; Galiana, I.; Asbeck, A.; Walsh, C. Controlling Negative and Positive Power at the Ankle with a Soft Exosuit. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3509–3515. [Google Scholar] [CrossRef]
- Siviy, C.; Bae, J.; Baker, L.; Porciuncula, F.; Baker, T.; Ellis, T.D.; Awad, L.N.; Walsh, C.J. Offline Assistance Optimization of a Soft Exosuit for Augmenting Ankle Power of Stroke Survivors during Walking. IEEE Robot. Autom. Lett. 2020, 5, 828–835. [Google Scholar] [CrossRef]
- Lessard, S.; Pansodtee, P.; Robbins, A.; Baltaxe-admony, L.B.; Trombadore, J.M.; Teodorescu, M.; Agogino, A.; Kurniawan, S. CRUX: A Compliant Robotic Upper-Extremity EXosuit for Lightweight, Portable, Multi-Joint Muscular Augmentation. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 1633–1638. [Google Scholar]
- Al-Fahaam, H.; Davis, S.; Nefti-Meziani, S.; Theodoridis, T. Novel Soft Bending Actuator-Based Power Augmentation Hand Exoskeleton Controlled by Human Intention. Intell. Serv. Robot. 2018, 11, 247–268. [Google Scholar] [CrossRef] [Green Version]
- Jung, M.M.; Ludden, G.D.S. Potential of Exoskeleton Technology to Assist Older Adults with Daily Living. In Proceedings of the CHI’ 18: CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 August 2018. [Google Scholar] [CrossRef]
- Eugene Kar Jian, C.; Gouwanda, D.; Kheng, T.K. Wearable Hand Exoskeleton for Activities of Daily Living. In Proceedings of the 2018 IEEE-EMBS Conference on Biomedical Engineering and Sciences (IECBES), Sarawak, Malaysia, 3–6 December 2019; pp. 221–225. [Google Scholar] [CrossRef]
- Mohammadi, A.; Lavranos, J.; Choong, P.; Oetomo, D. Flexo-Glove: A 3D Printed Soft Exoskeleton Robotic Glove for Impaired Hand Rehabilitation and Assistance. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; pp. 2120–2123. [Google Scholar] [CrossRef]
- Diftler, M.A.; Bridgwater, L.B.; Rogers, J.M. RoboGlove—A Grasp Assist Device for Earth and Space. In Proceedings of the 45th International Conference on Environmental Systems, Bellevue, WA, USA, 12–16 July 2015; pp. 1–8. [Google Scholar]
- Lee, S.; Kim, J.; Baker, L.; Long, A.; Karavas, N.; Menard, N.; Galiana, I.; Walsh, C.J. Autonomous Multi-Joint Soft Exsosuit with Online Optimization Reduces Energy Cost of Loaded Walking. J. Neuroeng. Rehabil. 2018. under review. [Google Scholar] [CrossRef]
- Scataglini, S.; Andreoni, G.; Gallant, J. A Review of Smart Clothing in Military. In Proceedings of the MobiSys’15: The 13th Annual International Conference on Mobile Systems, Applications, and Services, Florence, Italy, 18 May 2015; pp. 53–54. [Google Scholar] [CrossRef]
- Thalman, C.M.; Lam, Q.P.; Nguyen, P.H.; Sridar, S.; Polygerinos, P. A Novel Soft Elbow Exosuit to Supplement Bicep Lifting Capacity. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 6965–6971. [Google Scholar] [CrossRef]
- Veale, A.J.; Staman, K.; Van Der Kooij, H. Soft, Wearable, and Pleated Pneumatic Interference Actuator Provides Knee Extension Torque for Sit-to-Stand. Soft Robot. 2021, 8, 28–43. [Google Scholar] [CrossRef] [PubMed]
- Asbeck, A.T.; de Rossi, S.M.M.; Holt, K.G.; Walsh, C.J. A Biologically Inspired Soft Exosuit for Walking Assistance. Int. J. Robot. Res. 2015, 34, 744–762. [Google Scholar] [CrossRef]
- Yang, X.; Huang, T.H.; Hu, H.; Yu, S.; Zhang, S.; Zhou, X.; Carriero, A.; Yue, G.; Su, H. Spine-Inspired Continuum Soft Exoskeleton for Stoop Lifting Assistance. IEEE Robot. Autom. Lett. 2019, 4, 4547–4554. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.G.; Little, K.; Noronha, B.; Xiloyannis, M.; Masia, L.; Accoto, D. A Voice Activated Bi-Articular Exosuit for Upper Limb Assistance during Lifting Tasks. Robot. Comput. Integr. Manuf. 2020, 66, 101995. [Google Scholar] [CrossRef]
- Prange, G.B.; Jannink, M.J.A.; Groothuis-Oudshoorn, C.G.M.; Hermens, H.J.; Ijzerman, M.J. Systematic Review of the Effect of Robot-Aided Therapy on Recovery of the Hemiparetic Arm after Stroke. J. Rehabil. Res. Dev. 2006, 43, 171–183. [Google Scholar] [CrossRef] [Green Version]
- Haghshenas-Jaryani, M.; Nothnagle, C.; Patterson, R.M.; Bugnariu, N.; Wijesundara, M.B.J. Soft Robotic Rehabilitation Exoskeleton (REHAB Glove) for Hand Therapy. In Proceedings of the ASME 2017 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Cleveland, OH, USA, 6–9 August 2017; Volume 3. [Google Scholar]
- Yap, H.K.; Lim, J.H.; Nasrallah, F.; Cho Hong Goh, J.; Yeow, C.H. Characterisation and Evaluation of Soft Elastomeric Actuators for Hand Assistive and Rehabilitation Applications. J. Med. Eng. Technol. 2016, 40, 199–209. [Google Scholar] [CrossRef] [PubMed]
- Lessard, S.; Pansodtee, P.; Robbins, A.; Trombadore, J.M.; Kurniawan, S.; Teodorescu, M. A Soft Exosuit for Flexible Upper-Extremity Rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 1604–1617. [Google Scholar] [CrossRef]
- Wang, H.; Chen, J.; Lau, H.Y.K.; Ren, H. Motion Planning Based on Learning from Demonstration for Multiple-Segment Flexible Soft Robots Actuated by Electroactive Polymers. IEEE Robot. Autom. Lett. 2016, 1, 391–398. [Google Scholar] [CrossRef]
- Mutlu, R.; Alici, G.; Li, W. Electroactive Polymers as Soft Robotic Actuators: Electromechanical Modeling and Identification. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, NSW, Australia, 9–12 July 2013; pp. 1096–1101. [Google Scholar] [CrossRef] [Green Version]
- Mohd Jani, J.; Leary, M.; Subic, A.; Gibson, M.A. A Review of Shape Memory Alloy Research, Applications and Opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Jin, H.; Dong, E.; Xu, M.; Liu, C.; Alici, G.; Jie, Y. Soft and Smart Modular Structures Actuated by Shape Memory Alloy (SMA) Wires as Tentacles of Soft Robots. Smart Mater. Struct. 2016, 25, 1–10. [Google Scholar] [CrossRef]
- Walker, J.; Zidek, T.; Harbel, C.; Yoon, S.; Strickland, F.S.; Kumar, S.; Shin, M. Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators. Actuators 2020, 9, 3. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Zhang, Y.; Chen, Z.; Zhu, S. Parameter Identification and Model-Based Nonlinear Robust Control of Fluidic Soft Bending Actuators. IEEE/ASME Trans. Mechatron. 2019, 24, 1346–1355. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, Y.; Zhu, Y.; Zhu, S. A Computationally Efficient Dynamical Model of Fluidic Soft Actuators and Its Experimental Verification. Mechatronics 2019, 58, 1–8. [Google Scholar] [CrossRef]
- Subad, R.A.S.I.; Cross, L.B.; Park, K. Soft Robotic Hands and Tactile Sensors for Underwater Robotics. Appl. Mech. 2021, 2, 356–383. [Google Scholar] [CrossRef]
- Huo, W.; Mohammed, S.; Amirat, Y.; Kong, K. Active Impedance Control of a Lower Limb Exoskeleton to Assist Sit-to-Stand Movement. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3530–3536. [Google Scholar] [CrossRef]
- Aguirre-Ollinger, G.; Colgate, J.E.; Peshkin, M.A.; Goswami, A. Active-Impedance Control of a Lower-Limb Assistive Exoskeleton. In Proceedings of the 2007 IEEE 10th International Conference on Rehabilitation Robotics, Noordwijk, The Netherlands, 13–15 June 2007; pp. 188–195. [Google Scholar] [CrossRef] [Green Version]
- Kong, K.; Jeon, D. Design and Control of an Exoskeleton for the Elderly and Patients. IEEE/ASME Trans. Mechatron. 2006, 11, 428–432. [Google Scholar] [CrossRef]
- Trivedi, D.; Rahn, C.D.; Kier, W.M.; Walker, I.D. Soft Robotics: Biological Inspiration, State of the Art, and Future Research. Appl. Bionics Biomech. 2008, 5, 99–117. [Google Scholar] [CrossRef]
- Asbeck, A.T.; Schmidt, K.; Galiana, I.; Wagner, D.; Walsh, C.J. Multi-Joint Soft Exosuit for Gait Assistance. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6197–6204. [Google Scholar] [CrossRef]
- Gopura, R.A.R.C.; Bandara, D.S.V.; Kiguchi, K.; Mann, G.K.I. Developments in Hardware Systems of Active Upper-Limb Exoskeleton Robots: A Review. Robot. Auton. Syst. 2016, 75, 203–220. [Google Scholar] [CrossRef]
- Leonardis, D.; Barsotti, M.; Loconsole, C.; Solazzi, M.; Troncossi, M.; Mazzotti, C.; Castelli, V.P.; Procopio, C.; Lamola, G.; Chisari, C.; et al. An EMG-Controlled Robotic Hand Exoskeleton for Bilateral Rehabilitation. IEEE Trans. Haptics 2015, 8, 140–151. [Google Scholar] [CrossRef] [PubMed]
- Natividad, R.F.; Yeow, C.H. Development of a Soft Robotic Shoulder Assistive Device for Shoulder Abduction. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 989–993. [Google Scholar] [CrossRef]
- Park, D.; Cho, K.J. Development and Evaluation of a Soft Wearable Weight Support Device for Reducing Muscle Fatigue on Shoulder. PLoS ONE 2017, 12, e0173730. [Google Scholar] [CrossRef] [Green Version]
- Thompson, N.; Sinha, A.; Krishnan, G. Characterizing Architectures of Soft Pneumatic Actuators for a Cable-Driven Shoulder Exoskeleton. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 570–576. [Google Scholar] [CrossRef]
- Galiana, I.; Hammond, F.L.; Howe, R.D.; Popovic, M.B. Wearable Soft Robotic Device for Post-Stroke Shoulder Rehabilitation: Identifying Misalignments. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 317–322. [Google Scholar] [CrossRef]
- Natividad, R.F.; Hong, S.W.; Miller-Jackson, T.M.; Yeow, C.H. The Exosleeve: A Soft Robotic Exoskeleton for Assisting in Activities of Daily Living; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; Volume 22, ISBN 9783030018870. [Google Scholar]
- Jarrett, C.; McDaid, A.J. Robust Control of a Cable-Driven Soft Exoskeleton Joint for Intrinsic Human-Robot Interaction. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 976–986. [Google Scholar] [CrossRef]
- Chiaradia, D.; Xiloyannis, M.; Antuvan, C.W.; Frisoli, A.; Masia, L. Design and Embedded Control of a Soft Elbow Exosuit. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 565–571. [Google Scholar] [CrossRef]
- Wu, Q.; Chen, B.; Wu, H. Neural-Network-Enhanced Torque Estimation Control of a Soft Wearable Exoskeleton for Elbow Assistance. Mechatronics 2019, 63, 102279. [Google Scholar] [CrossRef]
- Xiloyannis, M.; Chiaradia, D.; Frisoli, A.; Masia, L. Physiological and Kinematic Effects of a Soft Exosuit on Arm Movements. J. Neuroeng. Rehabil. 2019, 16, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Ang, B.W.K.; Yeow, C.H. Design and Modeling of a High Force Soft Actuator for Assisted Elbow Flexion. IEEE Robot. Autom. Lett. 2020, 5, 3731–3736. [Google Scholar] [CrossRef]
- Bartlett, N.W.; Lyau, V.; Raiford, W.A.; Holland, D.; Gafford, J.B.; Ellis, T.D.; Walsh, C.J. A Soft Robotic Orthosis for Wrist Rehabilitation. J. Med Devices Trans. ASME 2015, 9, 2015–2017. [Google Scholar] [CrossRef]
- Ang, B.W.K.; Yeow, C.H. Design and Characterization of a 3d Printed Soft Robotic Wrist Sleeve with 2 DoF for Stroke Rehabilitation. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 577–582. [Google Scholar] [CrossRef]
- Choi, H.; Kang, B.B.; Jung, B.; Cho, K. Exo-Wrist: A Soft Tendon-Driven Wrist-Wearable Robot with Active Anchor for Dart-Throwing Motion in Hemiplegic Patients; IEEE: Piscataway, NJ, USA, 2019; Volume 4, pp. 4499–4506. [Google Scholar]
- Xu, Y. Design and Simulation of a Soft Robotic Device for Wrist Rehabilitation. In Proceedings of the 2020 3rd International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE), Shenzhen, China, 24–26 April 2020; pp. 697–701. [Google Scholar] [CrossRef]
- Chiaradia, D.; Tiseni, L.; Xiloyannis, M.; Solazzi, M.; Masia, L.; Frisoli, A. An Assistive Soft Wrist Exosuit for Flexion Movements with an Ergonomic Reinforced Glove. Front. Robot. AI 2021, 7, 595862. [Google Scholar] [CrossRef]
- Meng, Q.; Xiang, S.; Yu, H. Soft Robotic Hand Exoskeleton Systems: Review and Challenges Surrounding the Technology. In Proceedings of the 2017 2nd International Conference on Electrical, Automation and Mechanical Engineering (EAME 2017), Shanghai, China, 23–24 April 2017. [Google Scholar]
- Popov, D.; Gaponov, I.; Ryu, J.H. Portable Exoskeleton Glove with Soft Structure for Hand Assistance in Activities of Daily Living. IEEE/ASME Trans. Mechatron. 2017, 22, 865–875. [Google Scholar] [CrossRef]
- Haghshenas-Jaryani, M.; Carrigan, W.; Nothnagle, C.; Wijesundara, M.B.J. Sensorized Soft Robotic Glove for Continuous Passive Motion Therapy. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 815–820. [Google Scholar] [CrossRef]
- Yap, H.K.; Lim, J.H.; Nasrallah, F.; Low, F.Z.; Goh, J.C.H.; Yeow, R.C.H. MRC-Glove: A FMRI Compatible Soft Robotic Glove for Hand Rehabilitation Application. In Proceedings of the 2015 IEEE International Conference on Rehabilitation Robotics (ICORR), Singapore, 11–14 August 2015; pp. 735–740. [Google Scholar] [CrossRef]
- Nycz, C.J.; Delph, M.A.; Fischer, G.S. Modeling and Design of a Tendon Actuated Soft Robotic Exoskeleton for Hemiparetic Upper Limb Rehabilitation. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 3889–3892. [Google Scholar] [CrossRef]
- Yap, H.K.; Lim, J.H.; Nasrallah, F.; Goh, J.C.H.; Yeow, R.C.H. A Soft Exoskeleton for Hand Assistive and Rehabilitation Application Using Pneumatic Actuators with Variable Stiffness. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 4967–4972. [Google Scholar] [CrossRef]
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft Robotic Glove for Combined Assistance and At-Home Rehabilitation. Robot. Auton. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef] [Green Version]
- Rudd, G.; Daly, L.; Jovanovic, V.; Cuckov, F. A Low-Cost Soft Robotic Hand Exoskeleton for Use in Therapy of Limited Hand-Motor Function. Appl. Sci. 2019, 9, 3751. [Google Scholar] [CrossRef] [Green Version]
- Bützer, T.; Lambercy, O.; Arata, J.; Gassert, R. Fully Wearable Actuated Soft Exoskeleton for Grasping Assistance in Everyday Activities. Soft Robot. 2020, 8, 1–16. [Google Scholar] [CrossRef]
- Cheon, S.; Kim, D.; Kim, S.; Kang, B.B.; Lee, J.; Gong, H.; Jo, S.; Cho, K.-J.; Ahn, J. Single EMG Sensor-Driven Robotic Glove Control for Reliable Augmentation of Power Grasping. IEEE Trans. Med Robot. Bionics 2020, 3, 179–189. [Google Scholar] [CrossRef]
- Rose, C.G.; O’Malley, M.K. Hybrid Rigid-Soft Hand Exoskeleton to Assist Functional Dexterity. IEEE Robot. Autom. Lett. 2019, 4, 73–80. [Google Scholar] [CrossRef]
- Osorio, J.H.; Valencia, M.H. Bases Para El Entendimiento Del Proceso de La Marcha Humana. Arch. Med. 2013, 13, 88–96. [Google Scholar]
- Ortiz, J.; Poliero, T.; Cairoli, G.; Graf, E.; Caldwell, D.G. Energy Efficiency Analysis and Design Optimization of an Actuation System in a Soft Modular Lower Limb Exoskeleton. IEEE Robot. Autom. Lett. 2018, 3, 484–491. [Google Scholar] [CrossRef] [Green Version]
- Redín, M.I. Biomecánica y Bases Neuromusculares de La Actividad Física y El Deporte. Cult. Cienc. Deporte 2010, 5, 57–58. [Google Scholar]
- Ding, Y.; Panizzolo, F.A.; Siviy, C.; Malcolm, P.; Galiana, I.; Holt, K.G.; Walsh, C.J. Effect of Timing of Hip Extension Assistance during Loaded Walking with a Soft Exosuit. J. Neuroeng. Rehabil. 2016, 13, 87. [Google Scholar] [CrossRef] [Green Version]
- Poliero, T.; Di Natali, C.; Sposito, M.; Ortiz, J.; Graf, E.; Pauli, C.; Bottenberg, E.; De Eyto, A.; Caldwell, D.G. Soft Wearable Device for Lower Limb Assistance: Assessment of an Optimized Energy Efficient Actuation Prototype. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 559–564. [Google Scholar] [CrossRef]
- Zhang, T.; Tran, M.; Huang, H. Design and Experimental Verification of Hip Exoskeleton with Balance Capacities for Walking Assistance. IEEE/ASME Trans. Mechatron. 2018, 23, 274–285. [Google Scholar] [CrossRef]
- Kim, J.; Heimgartner, R.; Lee, G.; Karavas, N.; Perry, D.; Ryan, D.L.; Eckert-Erdheim, A.; Murphy, P.; Choe, D.K.; Galiana, I.; et al. Autonomous and Portable Soft Exosuit for Hip Extension Assistance with Online Walking and Running Detection Algorithm. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 5473–5480. [Google Scholar] [CrossRef]
- Park, Y.L.; Santos, J.; Galloway, K.G.; Goldfield, E.C.; Wood, R.J. A Soft Wearable Robotic Device for Active Knee Motions Using Flat Pneumatic Artificial Muscles. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 4805–4810. [Google Scholar] [CrossRef]
- Zhou, Z.; Liu, X.; Wang, Q. Concept and Prototype Design of a Soft Knee Exoskeleton with Continuum Structure (SoftKEX); Springer International Publishing: Berlin/Heidelberg, Germany, 2019; Volume 11740, ISBN 9783030275259. [Google Scholar]
- Di Natali, C.; Poliero, T.; Sposito, M.; Graf, E.; Bauer, C.; Pauli, C.; Bottenberg, E.; De Eyto, A.; O’sullivan, L.; Hidalgo, A.F.; et al. Design and Evaluation of a Soft Assistive Lower Limb Exoskeleton. Robotica 2019, 37, 2014–2034. [Google Scholar] [CrossRef] [Green Version]
- Porter, A.P.; Marchesini, B.; Potryasilova, I.; Rossetto, E.; Newman, D.J. Soft Exoskeleton Knee Prototype for Advanced Space Suits and Planetary Exploration. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–13. [Google Scholar] [CrossRef]
- Farris, D.J.; Sawicki, G.S. The Mechanics and Energetics of Human Walking and Running: A Joint Level Perspective. J. R. Soc. Interface 2012, 9, 110–118. [Google Scholar] [CrossRef] [Green Version]
- Mooney, L.M.; Rouse, E.J.; Herr, H.M. Autonomous Exoskeleton Reduces Metabolic Cost of Human Walking during Load Carriage. J. Neuroeng. Rehabil. 2014, 11, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Low, F.Z.; Ali, M.D.; Kapur, J.; Lim, J.H.; Yeow, C.H. A Soft Robotic Sock Device for Ankle Rehabilitation and Prevention of Deep Vein Thrombosis. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 753–758. [Google Scholar] [CrossRef]
- Chung, J.; Heimgartner, R.; Oneill, C.T.; Phipps, N.S.; Walsh, C.J. ExoBoot, a Soft Inflatable Robotic Boot to Assist Ankle during Walking: Design, Characterization and Preliminary Tests. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 509–516. [Google Scholar] [CrossRef]
- Xia, H.; Kwon, J.; Pathak, P.; Ahn, J.; Shull, P.B.; Park, Y.L. Design of A Multi-Functional Soft Ankle Exoskeleton for Foot-Drop Prevention, Propulsion Assistance, and Inversion/Eversion Stabilization. In Proceedings of the 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), New York, NY, USA, 29 November–1 December 2020; pp. 118–123. [Google Scholar] [CrossRef]
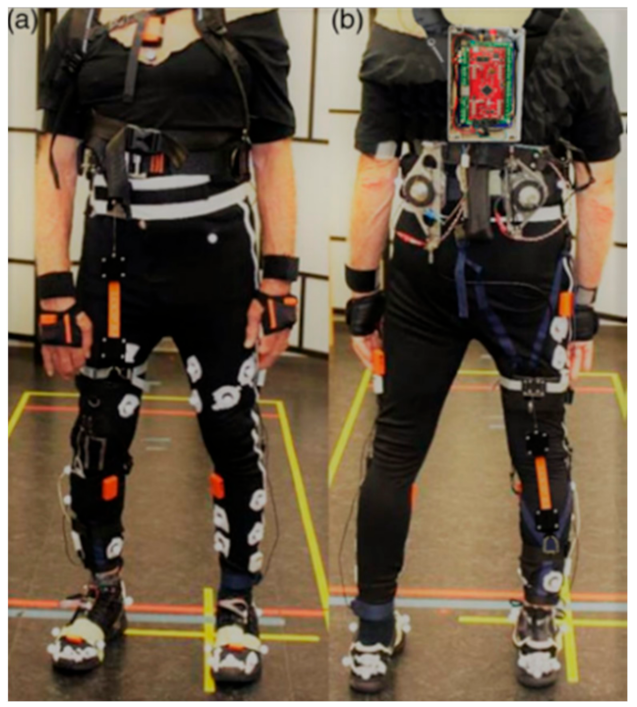
- Schubert, T.; Wollesen, B.; Weidner, R. Development and Preliminary Evaluation of a Lower Body Exosuit to Support Ankle Dorsiflexion. Appl. Sci. 2021, 11, 5007. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Actuator | DOF | Function | Control Strategy | Power | Power Transmission | Movement | Weight | Sensor |
|---|---|---|---|---|---|---|---|---|---|
| 2016 [49] | Pneumatic | 1 | Rehabilitation | Pressure-based position control | - | Inflatable beam made of thermoplastic polyurethane fiber | Abduction/adduction | - | Accelerometer, piezoresistive pressure sensor |
| 2017 [50] | - | 2 | Assistance/enhancer | - | - | Cam-rod structure, tendon-driven mechanism, rubber band | Flexion/extension, adduction/abduction | - | Electromyography |
| 2017 [9] | Pneumatic | 2 | Assistance for daily living | - | - | Neoprene vest, soft cross-link, pneumatic tube | Adduction/abduction and flexion/extension | 0.48 kg | - |
| 2019 [51] | Pneumatic | 1 | Enhancer | PID controller | - | Fiber-reinforced elastomer cylinder, Bowden cable, neoprene strap | Flexion/extension | - | Load cell, pressure sensors |
| 2019 [52] | Electric | 1 | Rehabilitation | Digital positioning control | 100 N | Clamp, Bowden cable, reel, gear | Abduction/adduction | Less than 300 g (without activation pack) | Electromagnetic tracker, encoder, inertial measurement unit, flexible piezoresistive sensor |
| 2019 [53] | Pneumatic | 1 | Assistance for daily living | - | - | Fabric, air chamber | Abduction/adduction | - | Electromyography |
| Year | Actuator | DOF | Function | Control Strategy | Power | Power Transmission | Movement | Weight | Sensors |
|---|---|---|---|---|---|---|---|---|---|
| 2017 [54] | Electric | 4 | Rehabilitation | Slider mode controller | - | Bowden cable, gearbox, elastic actuator series | Flexion/extension, pronation/supination of the elbow and wrist | <750 g | Encoder |
| 2018 [25] | Pneumatic | 1 | Enhancer | Single input single-output (SISO) | 27.6 Nm | Air chamber, non-stretch fabric, thermoplastic polyurethane | Flexión/extensión | - | Load cell, electromyography |
| 2018 [55] | Electric | 1 | Enhancer | Low-level closed-loop, high-level estimator | - | Fabric frame, Bowden cables, planetary gearhead, spool, silicone | Flexion/extension | - | Silicone stretch sensor, load cell, quadrature encoder |
| 2019 [56] | Electric | - | Assistance for daily living | Neural network, PID | - | Cable, gear, pulley, spring | Flexión/extensión | - | Force sensor, encoder, electromyography, inertial measurement unit |
| 2019 [57] | Electric | 1 | Assistance/enhancer | Admittan-ce and PID controller | 8.5 Nm | Bowden cable, fabric strap, webbing band, gearhead, pulley | Flexion/extension | 170 g (wearable part) | Load cell, encoder |
| 2019 [7] | Electric | 2 | Assistance | PI control | Fabric, lead screw, motor dc, Bowden cable | Flexion/extension, pronation/supination | 358 g | Infrared sensor | |
| 2020 [58] | Pneumatic | 1 | Assistance for daily living | - | 98.65 N | Bellows, fabric sleeve, elastomer | Flexión/extensión | 230 g | Force sensor |
| Year | Actuator | DOF | Function | Control Strategy | Power | Power Transmission | Movement | Weight | Sensors |
|---|---|---|---|---|---|---|---|---|---|
| 2015 [59] | Pneumatic | 3 | Rehabilitation | - | - | Pneumatic tube, textile sleeve, glove, tensioning mechanism (ratchet, cable, eyelet) | Flexion/extension, and radial/ulnar deviation, supination/pronation | 2.26 kg (complete), 0.22 kg (Portable part), 0.09 kg (distal) | Pressure sensor |
| 2016 [5] | Pneumatic | 2 | Rehabilitation and assistance for daily living | Direct control | Flexion (37 N), another move (55 N) | McKibben, pipe | Flexion/extension, radial/ulnar and circular | 150 g | Pressure sensor |
| 2019 [60] | Pneumatic | 2 | Rehabilitation | - | - | Pneumatic chamber, thermoplastic polyurethane | Flexion/extension and radial/ulnar | - | Torque sensor |
| 2019 [61] | Electric | 2 | Rehabilitation | - | 50 N (tension), Torque > 0.35 Nm | Pulley, silicone rubber, Teflon tubes, cable (Dyneema), spring | Flexion/extension, abduction/adduction | 1003 g (total weight), 233 g (portable part) | EMG, load cell |
| 2020 [62] | Pneumatic | 1 | Rehabilitation | - | - | Siloxane elastomer, polyethylene terephthalate shell | Flexion/extension | - | - |
| 2021 [63] | Electric | 1 | Assistance/enhancer | Admittan-ce controller | 3 Nm | Bowden cable, elastic fabric, ABS support, pulley, strap, motor | Flexion/extension | 0.3 kg | Inertial measurement unit, force sensor, load cell, gyroscope |
| Year | Actuator | DOF | Function | Control Strategy | Power | Power Transmission | Movement | Weight | Sensors |
|---|---|---|---|---|---|---|---|---|---|
| 2015 [68] | Electric | 6 | Rehabilitation | - | - | Cable, gear, pulley | Flexion/extension | - | - |
| 2015 [69] | Pneumatic | - | Rehabilitation and assistance for daily living | - | 3.59 N (grip), 2.72 N (pinch) | Platinum Liquid Silicone | Flexion/extension | 200 g (glove only) | - |
| 2015 [70] | Hydraulic | - | Rehabilitation and assistance for daily living | Controller closed circuit, sliding mode controller | 8 N (distal end) | Fiber-reinforced actuator, hydraulic tubing | Four finger and thumb flexion/extension, thumb twist | 285 g (glove), belt pack assembly (3.3 kg) | Hydraulic pressure sensor, led sensor, electromagnetic tracking sensor |
| 2016 [65] | Electric | 4 | Assistance for daily living | - | 16 N (pinch) | Cable (Dyneema), gear, pulley | Flexion/extension | 250 g (wearable glove), 340 g (complete) | Resistive flexor, infrared sensor |
| 2019 [71] | Electric | - | Rehabilitation | Joint position control | 9 N | Spur gear, spool, DC motor, elastic material, cable | Grasp | <400 g | Position sensor |
| 2020 [72] | Electric | 3 | Assistance for daily living | Direct force-based control | 6.4 N (little finger), 5.2 N (middle finger), 5.4 N (thumb) | Bowden cable, rack and pinion, winch | Four finger and thumb flexion/extension, thumb abduction/adduction | 148 g (hand module), 720 g backpack | Bending angle sensor |
| 2020 [73] | Electric | - | Enhancer | Dual-threshold and Morse-code control | - | Bowden cable, gear, clutch, spool | Grasp | 450 g | Electromyography |
| Year | Actuator | DOF | Function | Control Strategy | Power | Power Transmission | Movement | Weight | Sensors |
|---|---|---|---|---|---|---|---|---|---|
| 2015 [11] | Electric | 1 | Assistance for daily living | - | - | Gear, spool, timing belt | Extension/flexion | 7.52 kg | Force sensor, encoder |
| 2016 [78] | - | 1 | Enhancer | - | 198.5 ± 0.1 N | Bowden cable, woven fabric, neoprene, ball screw | Flexion/extension | ≈700 g | Inertial measurement unit, load cell |
| 2018 [79] | Electric | 1 | Assistance for daily living | - | - | Bowden cable, elastic band | - | 4.1 kg (all), 0.7 kg (hip actuation) | Pressure sensor |
| 2018 [80] | Electric | 4 | Assistance for daily living | Adaptive admittance and control scheme based on a conventional finite state machine | 40 Nm | - | - | 9.2 kg (excluding battery) | Encoder, inertial measurement units, resistive sensor, torque sensor |
| 2018 [81] | Electric | 2 | Enhancer | Force-based position controller | 300 N | Bowden cable, gear, pulley | Extension/flexion | 4.7 kg (complete system) | Inertial measuring unit, load cells, incremental encoder |
| Year | Actuator | DOF | Function | Control Strategy | Power | Power Transmission | Movement | Weight | Sensors |
|---|---|---|---|---|---|---|---|---|---|
| 2014 [82] | Pneumatic | 1 | Rehabilitation | - | 3.5 N extension, 7 N flexion | Air chamber, Kevlar fibers, silicone rubber, elastomer, cloth sleeve | Extension/flexion | - | - |
| 2017 [13] | Pneumatic | 1 | Rehabilitation | Binary controller | 4.4 Nm | Elastic fiber (neoprene), strap, inflatable actuator, pneumatic valve | Extension | 160 g (not including electro-pneumatic elements) | Force-sensitive resistance, fluid pressure sensor |
| 2019 [83] | Electric | 2 | Assistance for daily living | Hierarchical control system | - | Bowden cable, gear, pulley | Extension/flexion and unilateral rotation | 1.3 kg (mechanic-al structure) | Load cell, inertial measuring unit, encoder, force sensor |
| 2019 [84] | Electric | 2 | Assistance for daily living | Bowden cable, elastic band | Quasi-passive, hip and knee | 4.9 kg (complete) | Force sensor | ||
| 2020 [85] | Pneumatic | 1 | Enhancer | - | - | Air chamber, personalized garment with fibers and weaving techniques | Extension/flexion | - | - |
| 2020 [14] | Pneumatic | 1 | Enhancer | Gait estimation model and knee torque model | 17 N | Positive and negative pressure valves, air pump, air tubes, vacuum-actuated rotary actuator | Flexion/extension | 2.8 kg | Pressure sensors, inertial measurement unit |
| Year | Actuator | DOF | Function | Control Strategy | Power | Power Transmission | Movement | Weight | Sensors |
|---|---|---|---|---|---|---|---|---|---|
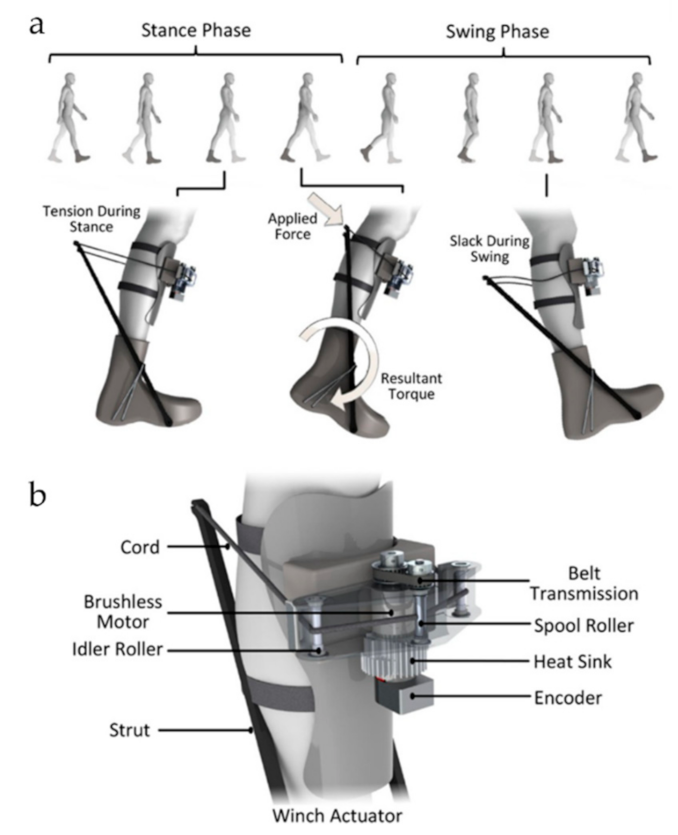
| 2014 [87] | Electric | 1 | Enhancer | Position control | - | Belt, polyethylene cord, spool, fiberglass strut, winch actuator | Plantar flex | 4 Kg (1.7 kg at waist and 2.3 kg on the legs) | Encoder, gyroscope |
| 2016 [15] | Electric | 1 | Enhancer and assistance for daily living | Low and high-level control | - | Bowden cable, gear, pulley | Flexion | - | Gyros, load cell |
| 2016 [88] | Pneumatic | 1 | Rehabilitation | - | - | Elastomer, fabric | Dorsiflexion and plantar flexion | - | Pressure sensor, force sensor |
| 2018 [89] | Pneumatic | 1 | Assistance for daily living | Open loop pressure controller | 39 Nm | Pneumatic tubes, textile-based inflatable actuator, solenoid valve | Plantar flexion | - | Inertial measurement unit, pressure sensor |
| 2020 [90] | Electric | 2 | Rehabilitation | Current-based torque control | 7.9 Nm | Bidirectional cable, rack and pinion, soft thermoplastic polyurethane, PLA filament, polylactic acid | Inversión/eversión and dorsiflexión/plantar flexión | 0.98 kg | Inertial measurement unit, force sensor |
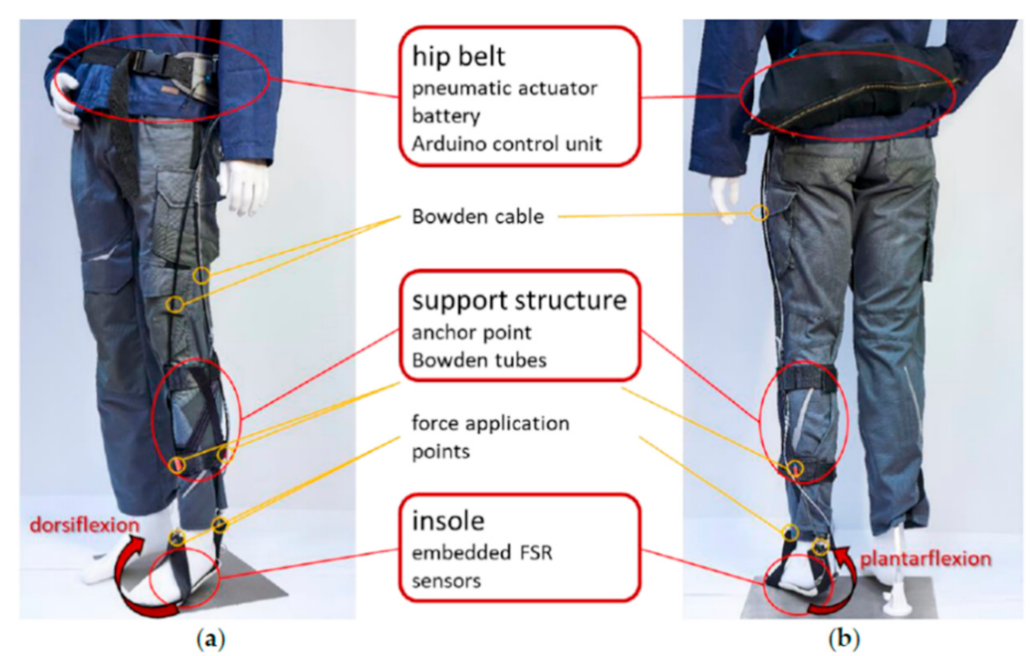
| 2021 [91] | pneumatic | 1 | Rehabilitation | - | - | Bowden tube, Bowden cable, webbing, solenoid valve, cylinder | Dorsiflexion/plantar flexion | - | Flexiforce force-sensing resistors, inertial measurement unit |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pérez Vidal, A.F.; Rumbo Morales, J.Y.; Ortiz Torres, G.; Sorcia Vázquez, F.d.J.; Cruz Rojas, A.; Brizuela Mendoza, J.A.; Rodríguez Cerda, J.C. Soft Exoskeletons: Development, Requirements, and Challenges of the Last Decade. Actuators 2021, 10, 166. https://0-doi-org.brum.beds.ac.uk/10.3390/act10070166
Pérez Vidal AF, Rumbo Morales JY, Ortiz Torres G, Sorcia Vázquez FdJ, Cruz Rojas A, Brizuela Mendoza JA, Rodríguez Cerda JC. Soft Exoskeletons: Development, Requirements, and Challenges of the Last Decade. Actuators. 2021; 10(7):166. https://0-doi-org.brum.beds.ac.uk/10.3390/act10070166
Chicago/Turabian StylePérez Vidal, Alan Francisco, Jesse Yoe Rumbo Morales, Gerardo Ortiz Torres, Felipe de Jesús Sorcia Vázquez, Alan Cruz Rojas, Jorge Aurelio Brizuela Mendoza, and Julio César Rodríguez Cerda. 2021. "Soft Exoskeletons: Development, Requirements, and Challenges of the Last Decade" Actuators 10, no. 7: 166. https://0-doi-org.brum.beds.ac.uk/10.3390/act10070166