Reclassification of Microseismic Events through Hypocenter Location: Case Study on an Unstable Rock Face in Northern Italy




Abstract
:1. Introduction
2. Materials and Methods
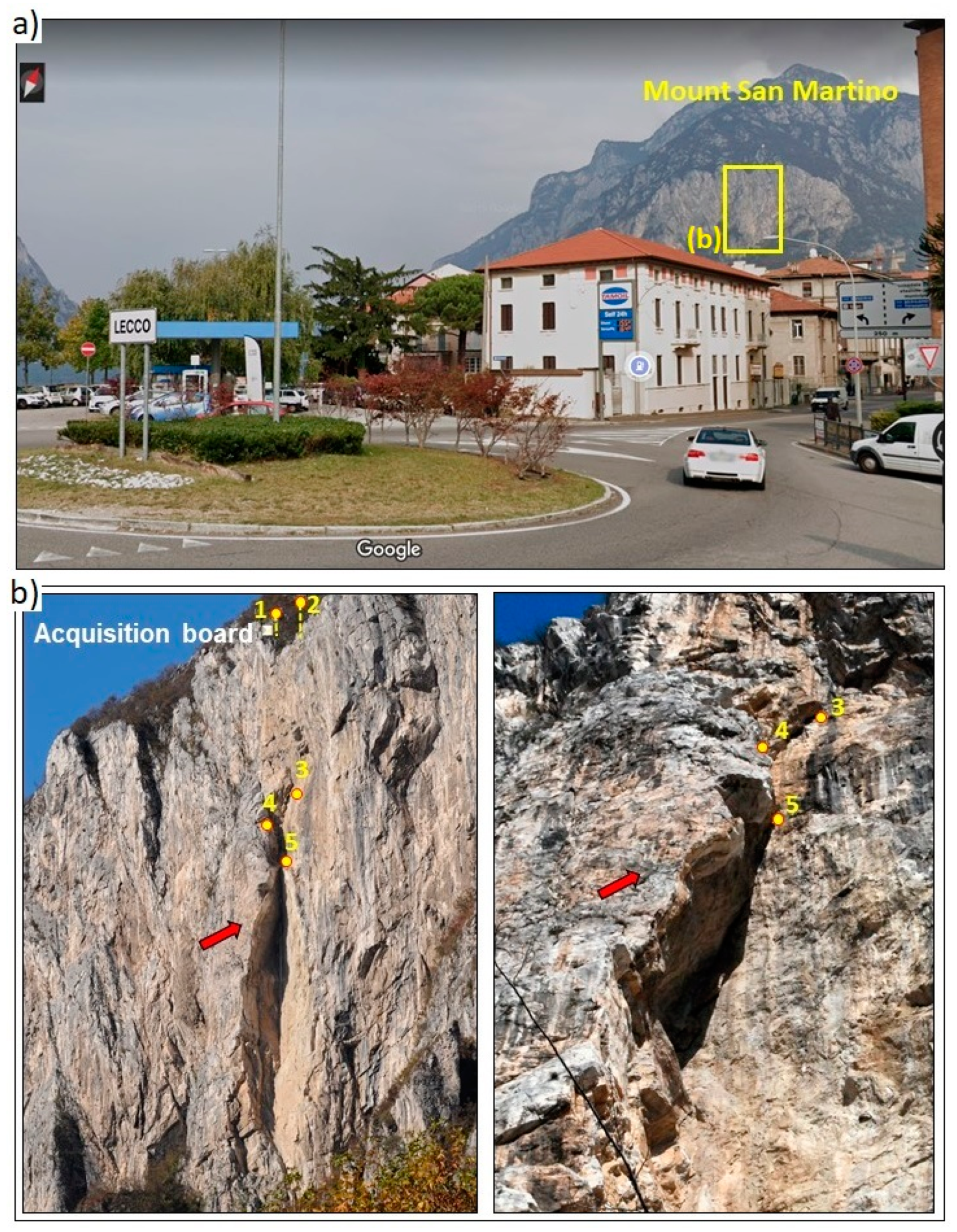
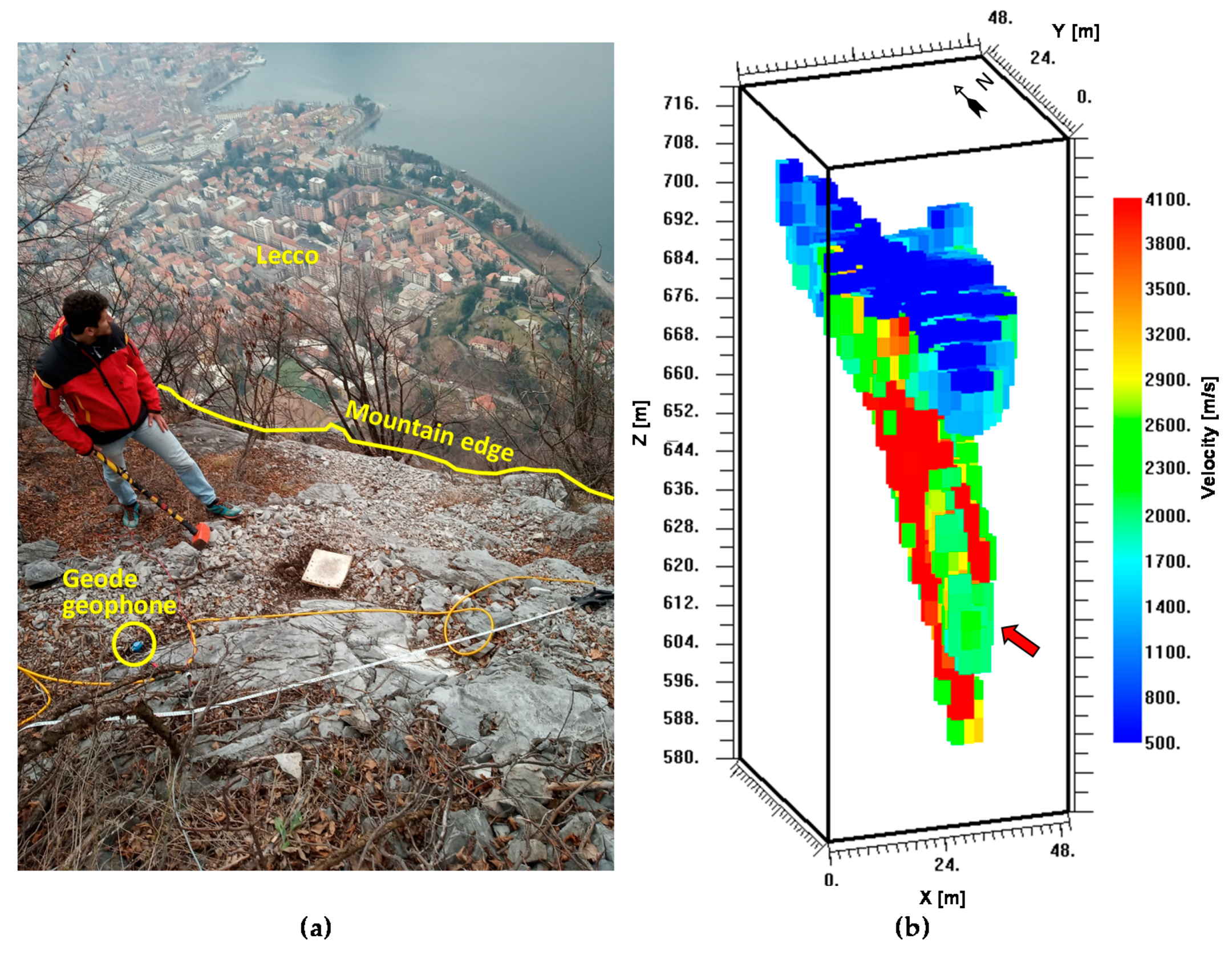
2.1. Study Area
2.2. Automatic Classification of Events
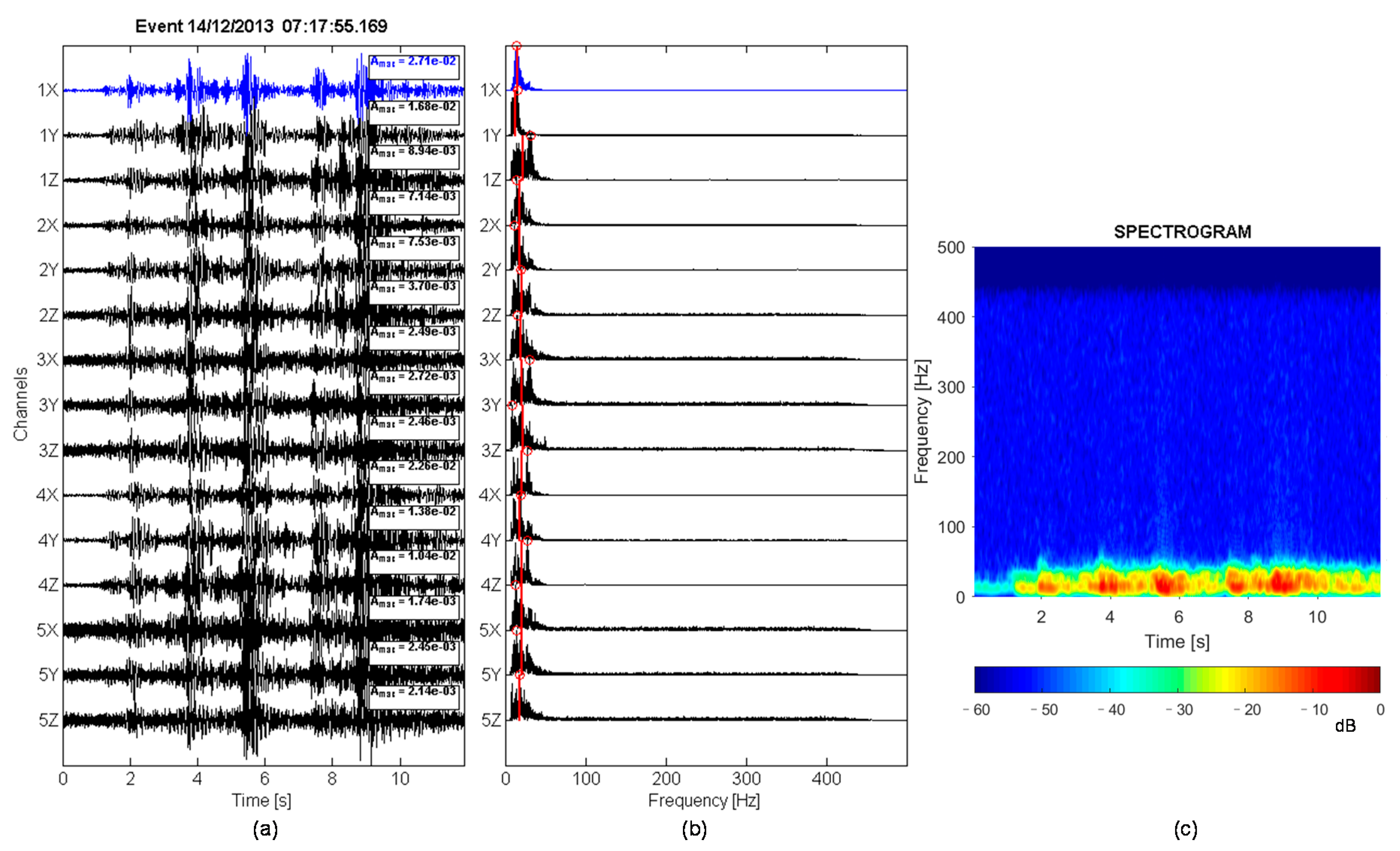
- Microseismic events likely related to the propagation of fractures inside the rock mass or to rockfalls (MS events);
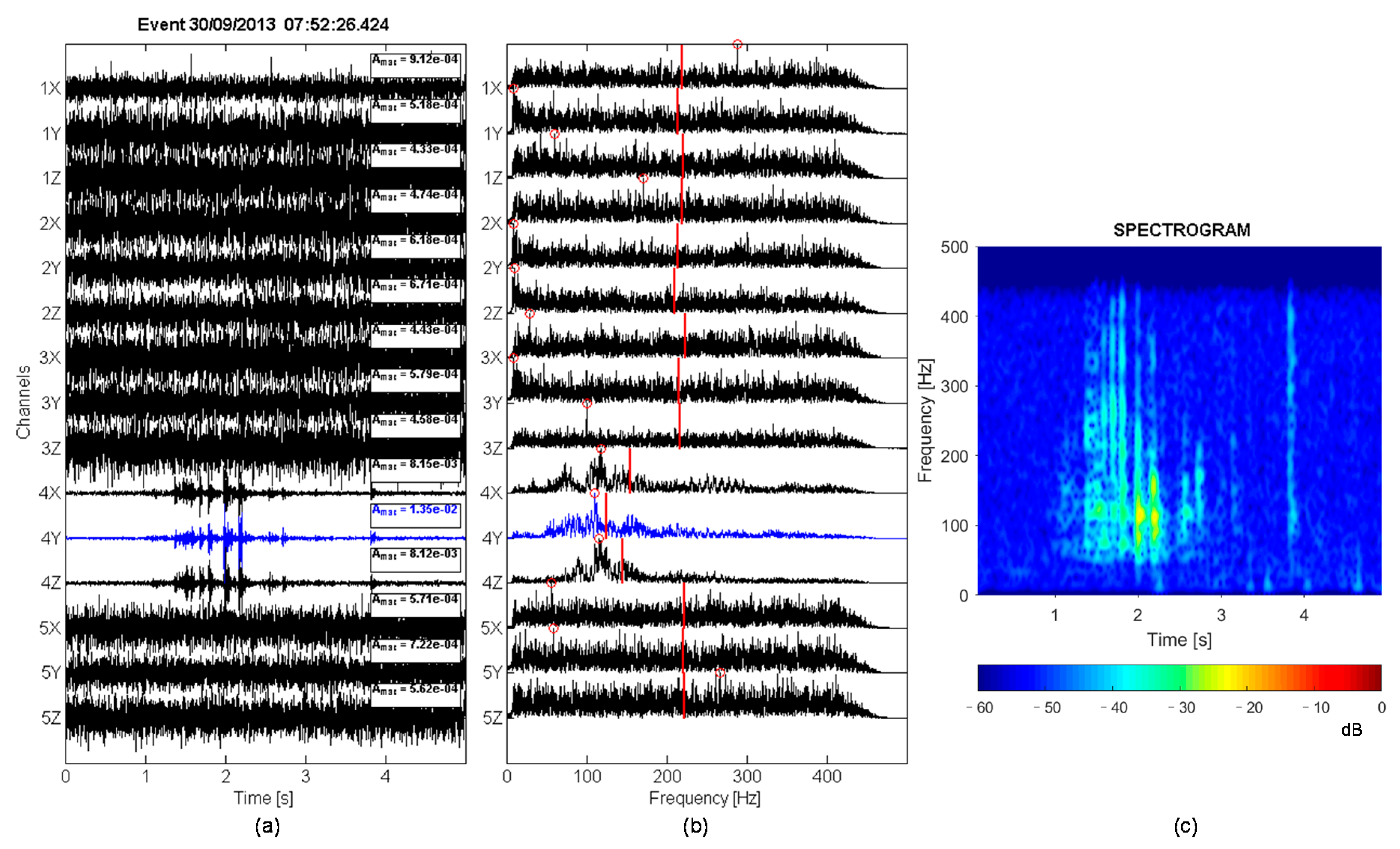
- Local events related to minor rockfalls generated by small rocks hitting the rock face close to the geophone locations and thus recorded by just a limited number of channels (local events);
- Broad-band (BB) signals related to impulsive signals with a broad frequency band, mostly generated by thunderstorms (BB signals);
- Mixed events including both broad-band signals and microseismic events (mixed events);
- Unclassified noise indicating the signals with unspecified characteristics (unclassified noise).
2.3. Classification of Microseismic Data
2.4. 3D Seismic Velocity Model
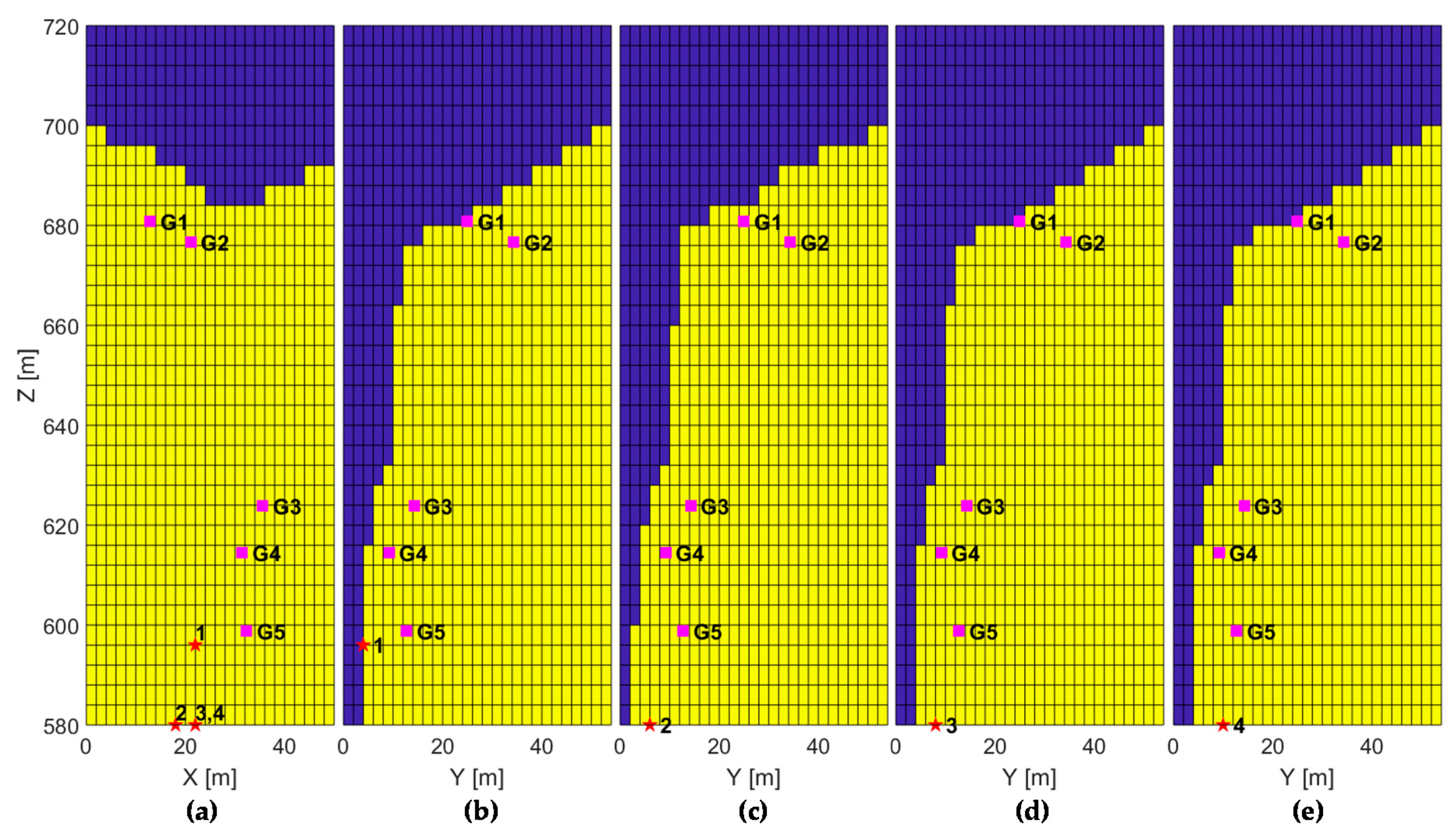
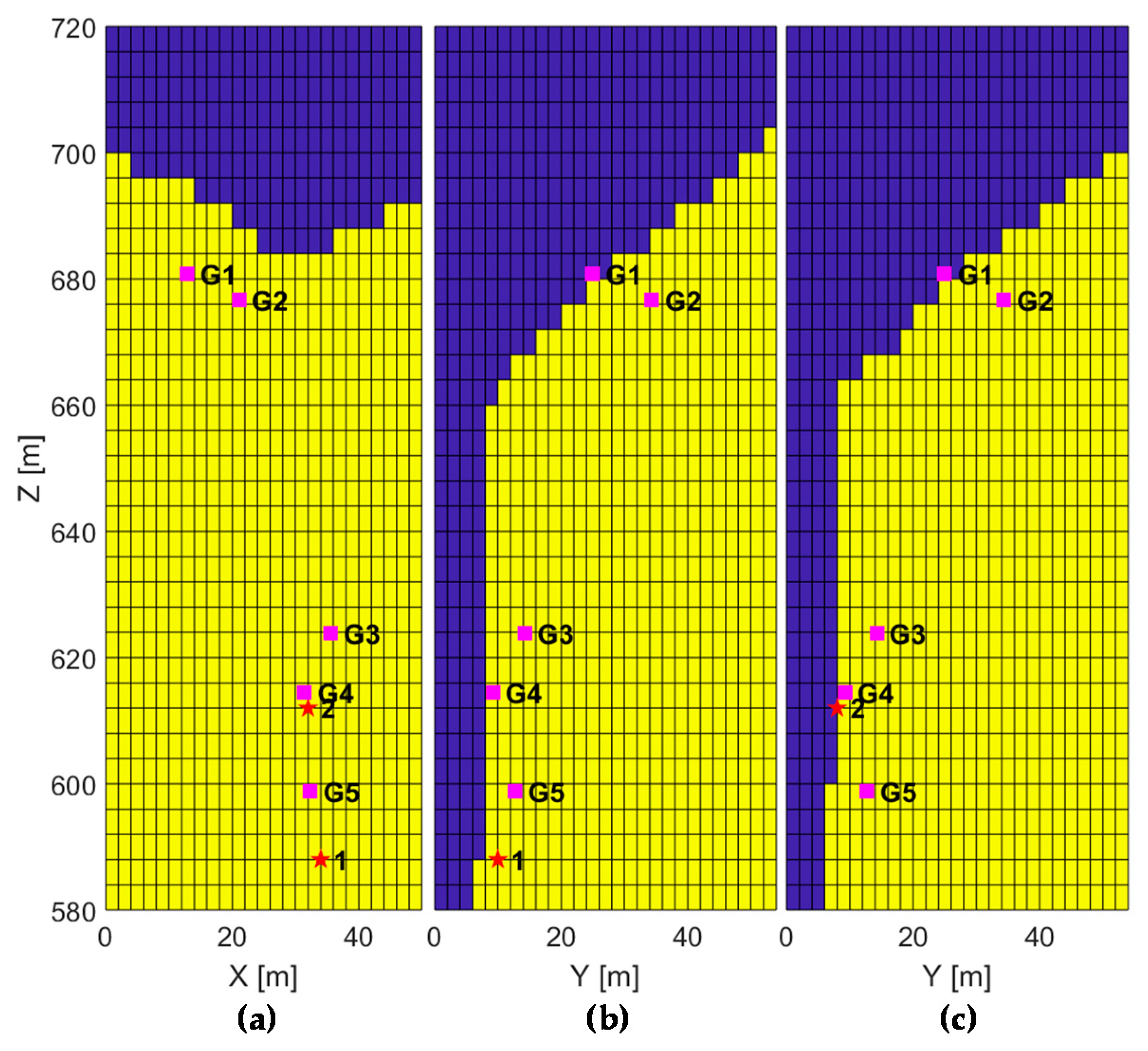
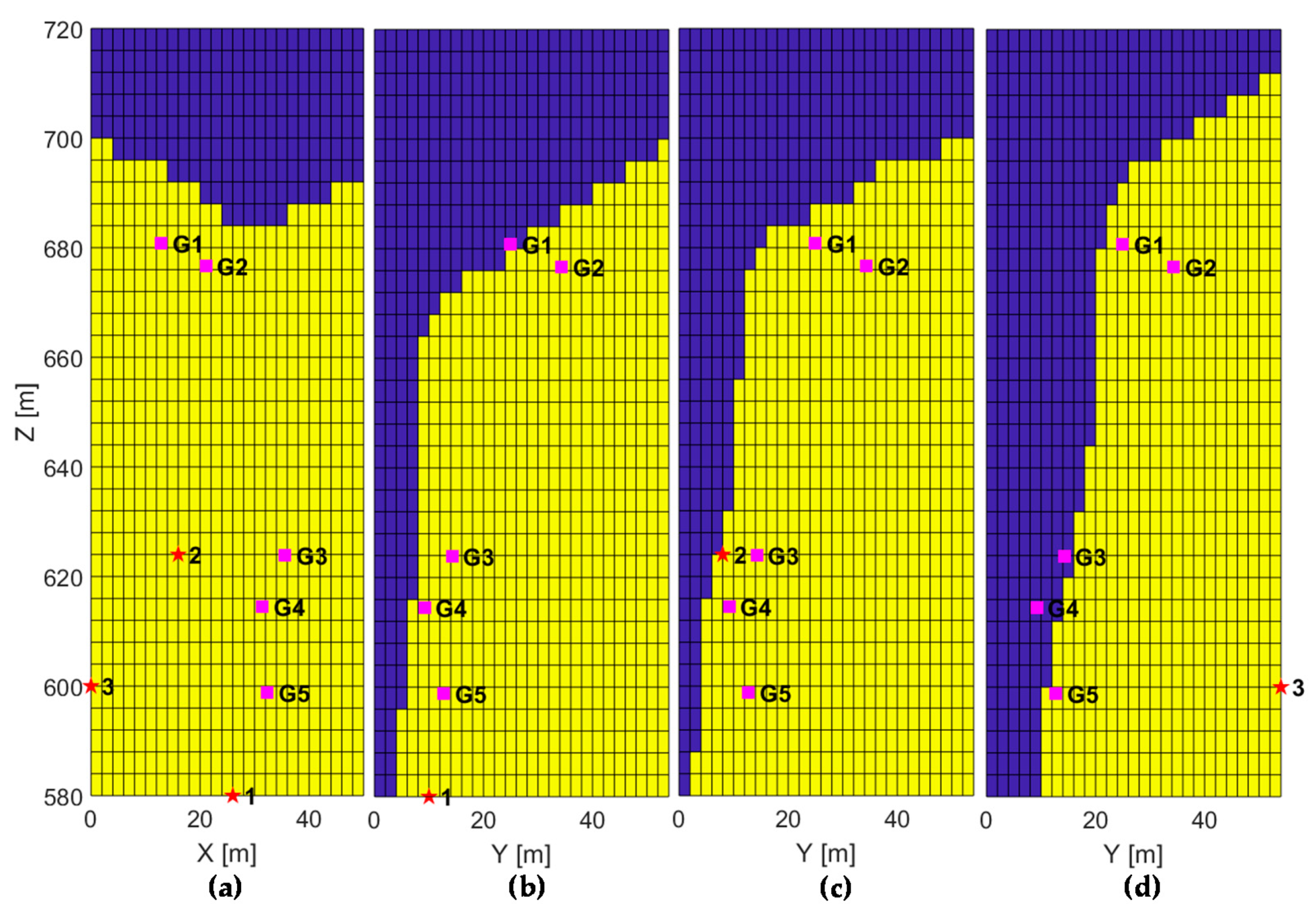
2.5. Localization Method and Location Accuracy
3. Results and Discussion
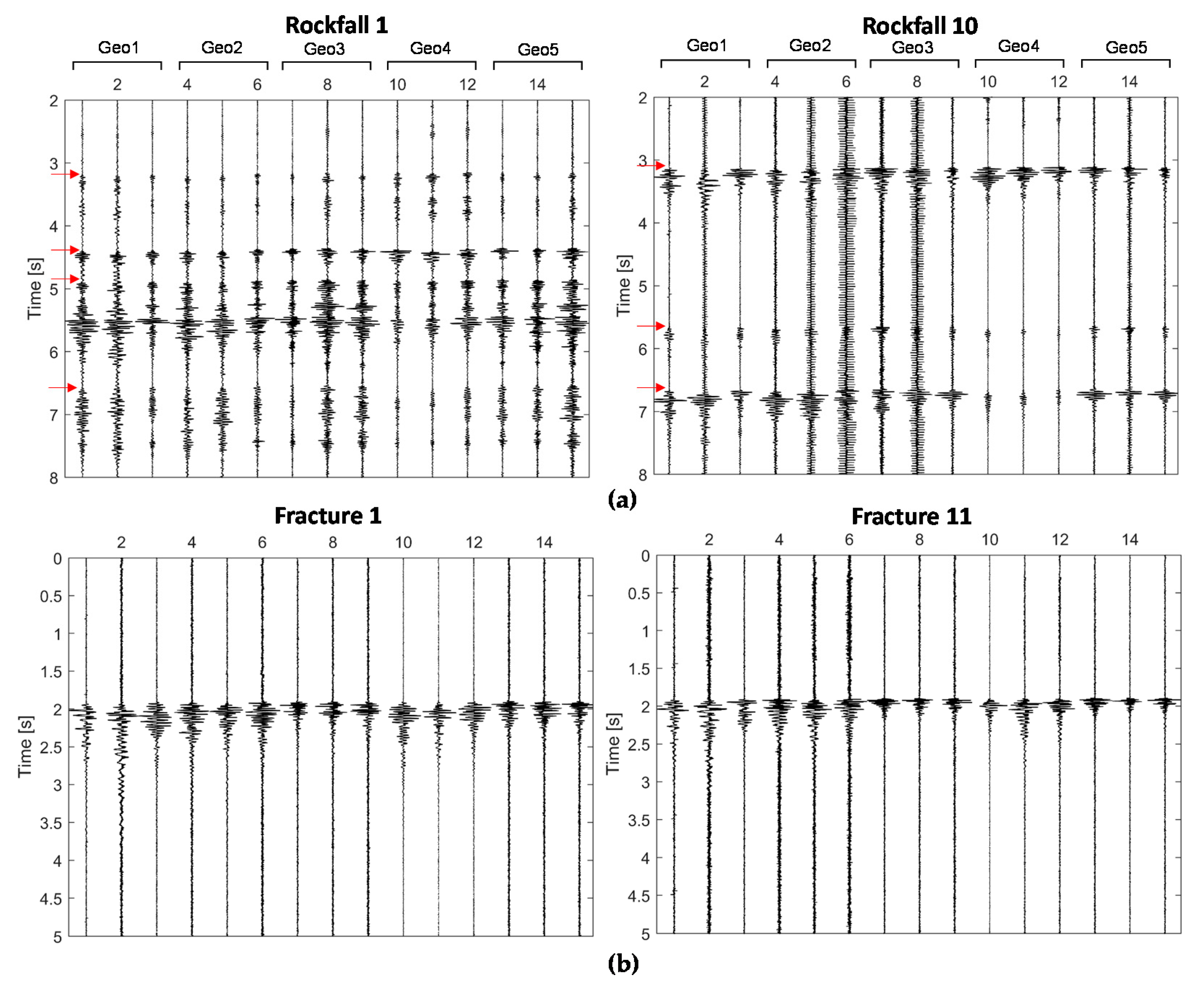
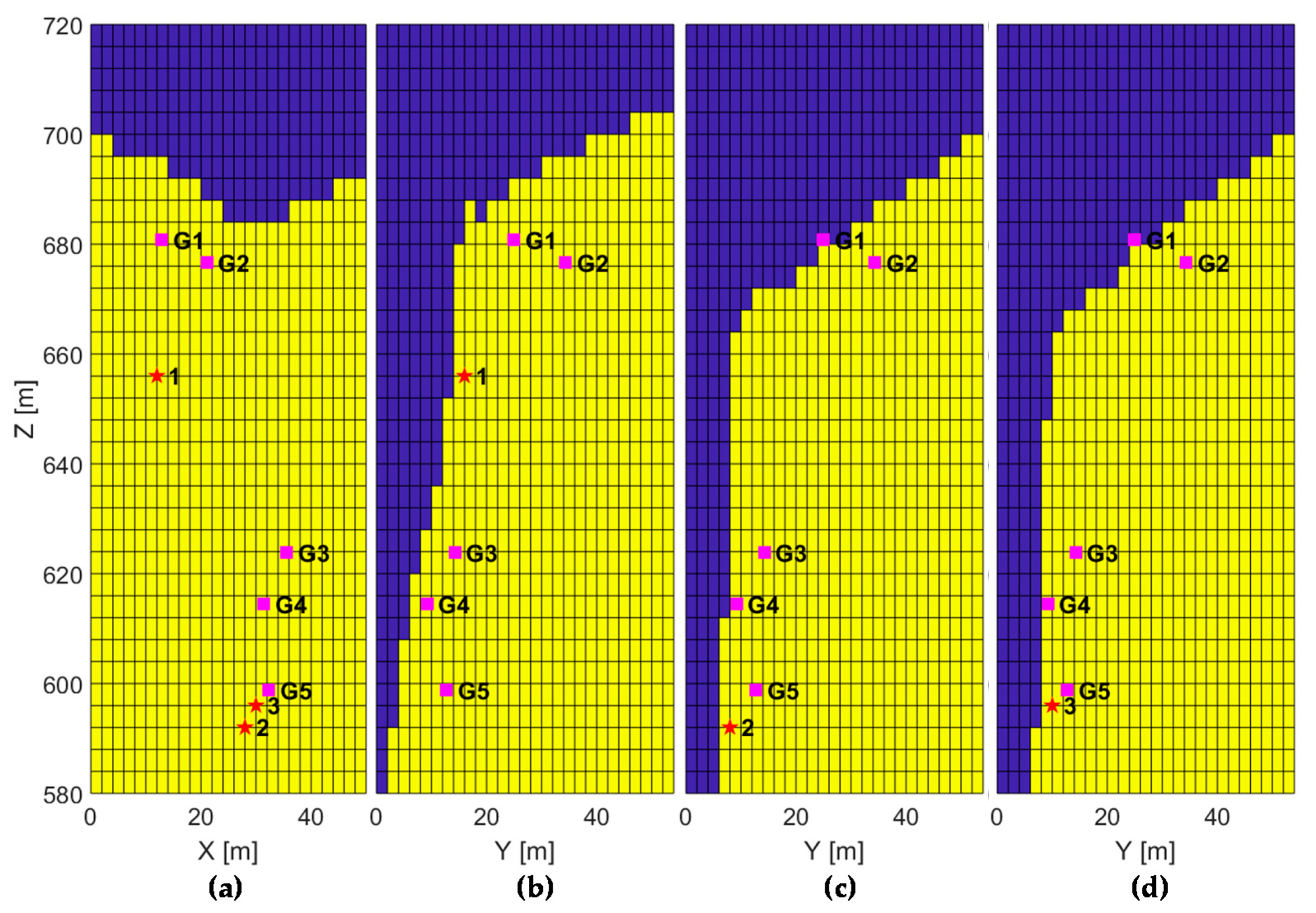
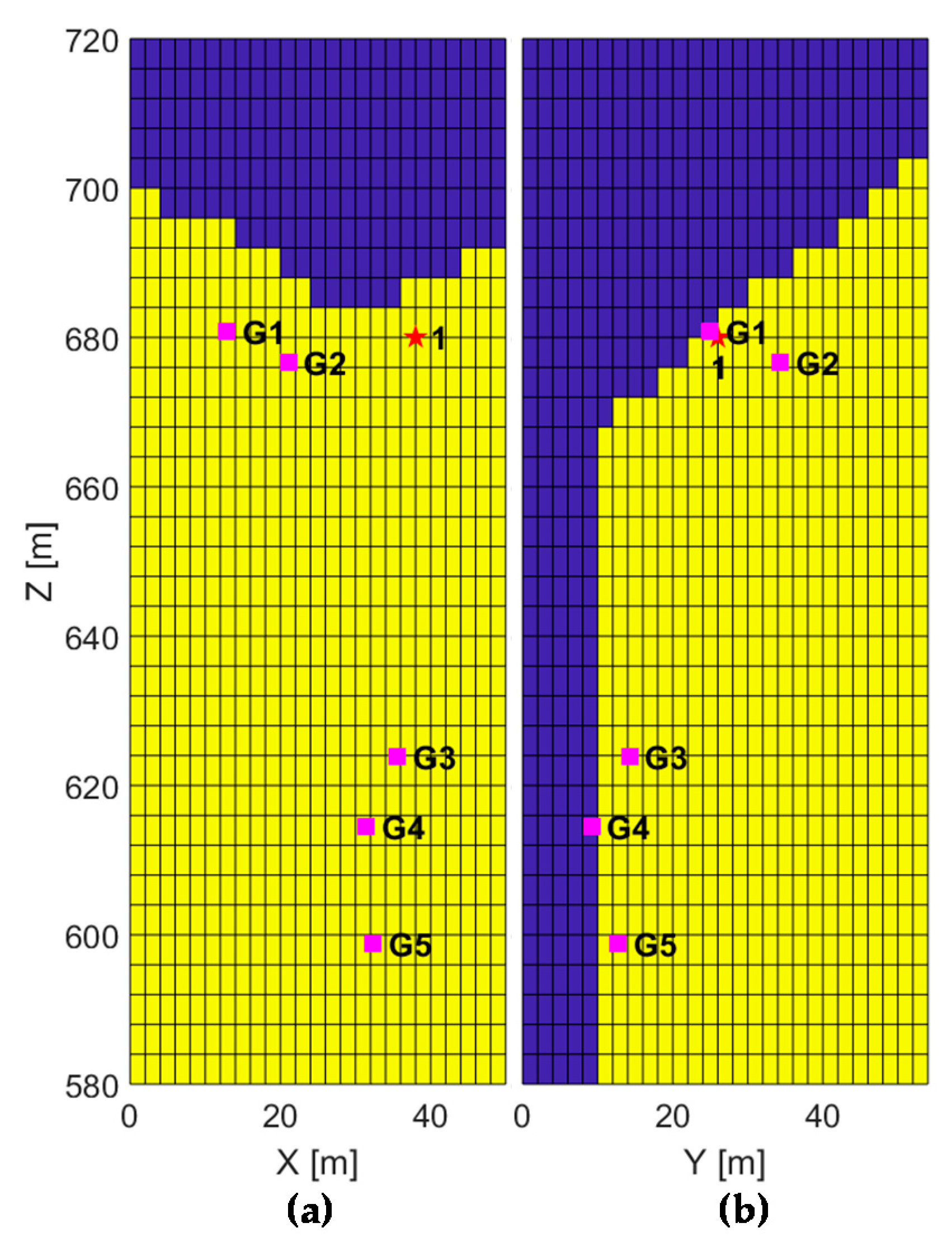
3.1. Location of Rockfall Events
- Rockfall events that were generated by only one falling stone bouncing on the rock face (Single);
- Rockfall events that involve more than one stone (Multiple);
- Rockfall events in which the number of involved stones is uncertain considering the location accuracy (Uncertain);
- Rockfall events that occurred on the rock surface at the summit of the rock face (Summit debris noise).
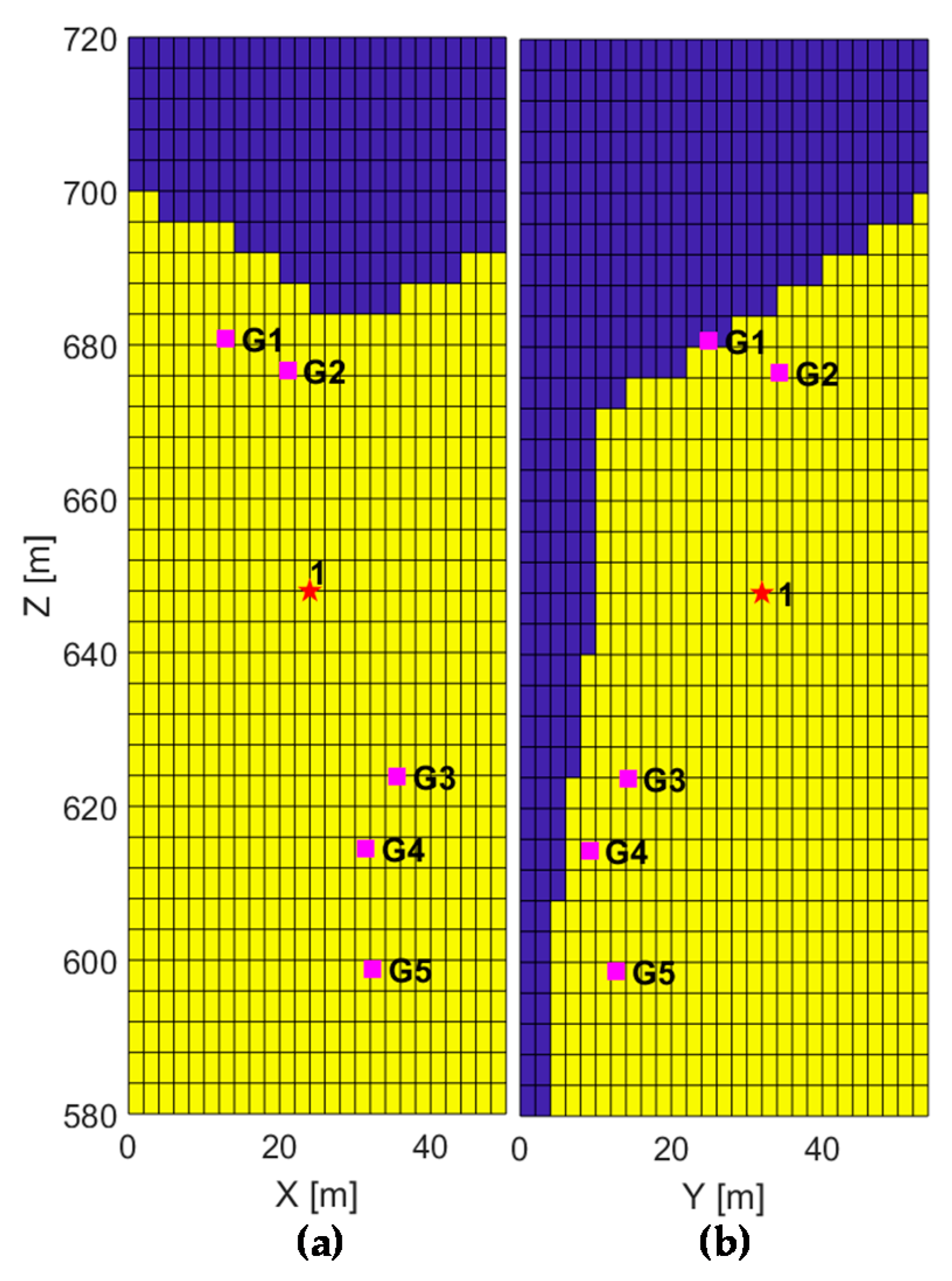
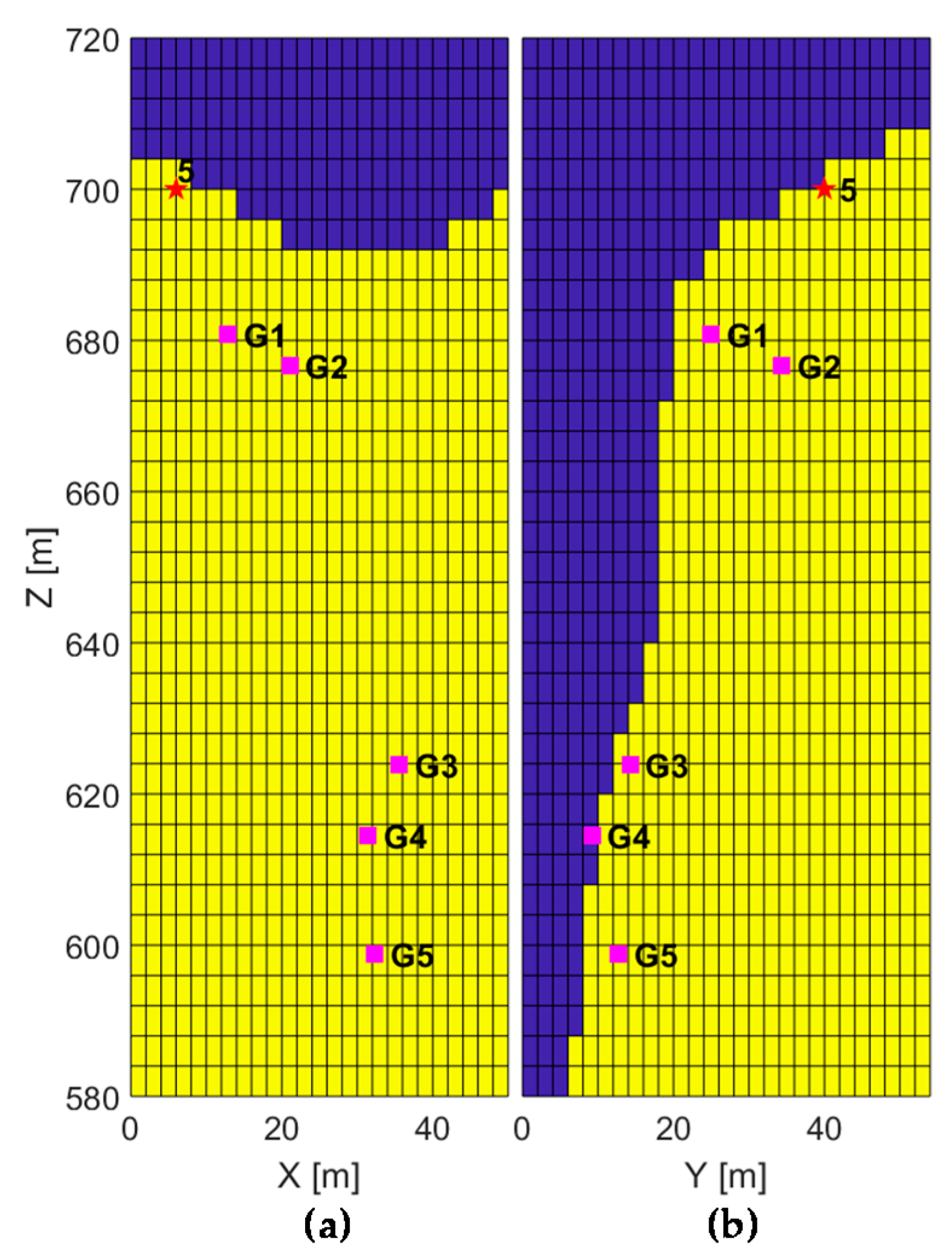
3.2. Location of Fracture Events
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hungr, O.; Leroueil, S.; Picarelli, L. The Varnes classification of landslide types, an update. Landslides 2014, 11, 167–194. [Google Scholar] [CrossRef]
- Supper, R.; Ottowitz, D.; Jochum, B.; Kim, J.H.; Römer, A.; Baron, I.; Pfeiler, S.; Lovisolo, M.; Gruber, S.; Vecchiotti, F. Geoelectrical monitoring: An innovative method to supplement landslide surveillance and early warning. Near Surf. Geophys. 2014, 12, 133–150. [Google Scholar] [CrossRef] [Green Version]
- Arosio, D.; Munda, S.; Tresoldi, G.; Papini, M.; Longoni, L.; Zanzi, L. A customized resistivity system for monitoring saturation and seepage in earthen levees: Installation and validation. Open Geosci. 2017, 9, 457–467. [Google Scholar] [CrossRef]
- Taruselli, M.; Arosio, D.; Longoni, L.; Papini, M.; Corsini, A.; Zanzi, L. Rock Stability as Detected by Seismic Noise Recordings-Three Case Studies. In Proceedings of the 24th European Meeting of Environmental and Engineering Geophysics, Porto, Portugal, 9–13 September 2018. [Google Scholar]
- Hojat, A.; Arosio, D.; Longoni, L.; Papini, M.; Tresoldi, G.; Zanzi, L. Installation and validation of a customized resistivity system for permanent monitoring of a river embankment. In Proceedings of the EAGE-GSM 2nd Asia Pacific Meeting on Near Surface Geoscience and Engineering, Kuala Lumpur, Malaysia, 22–26 April 2019. [Google Scholar]
- Hojat, A.; Arosio, D.; Ivanov, V.I.; Longoni, L.; Papini, M.; Scaioni, M.; Tresoldi, G.; Zanzi, L. Geoelectrical characterization and monitoring of slopes on a rainfall-triggered landslide simulator. J. Appl. Geophys. 2019, 170, 103844. [Google Scholar] [CrossRef]
- Cochran, E.S.; Wolin, E.; McNamara, D.E.; Yong, A.; Wilson, D.; Alvarez, M.; Van Der Elst, N.; McClain, A.; Steidl, J. The U.S. Geological Survey’s Rapid seismic array deployment for the 2019 ridgecrest earthquake sequence. Seismol. Res. Lett. 2020, 91, 1952–1960. [Google Scholar] [CrossRef]
- Hojat, A.; Arosio, D.; Ivanov, V.I.; Loke, M.H.; Longoni, L.; Papini, M.; Tresoldi, G.; Zanzi, L. Quantifying seasonal 3D effects for a permanent electrical resistivity tomography monitoring system along the embankment of an irrigation canal. Near Surf. Geophys. 2020, 18, 427–443. [Google Scholar] [CrossRef]
- Searcy, C.K.; Power, J.A. Seismic character and progression of explosive activity during the 2016–2017 eruption of Bogoslof volcano, Alaska. Bull. Volcanol. 2020, 82, 12. [Google Scholar] [CrossRef]
- Ziwu, F.D.; Doser, D.I.; Schinagel, S.M. A geophysical study of the Castle Mountain Fault, southcentral Alaska. Tectonophysics 2020, 789, 228567. [Google Scholar] [CrossRef]
- Huang, C.J.; Yin, H.Y.; Chen, C.Y.; Yeh, C.H.; Wang, C.L. Ground vibrations produced by rock motions and debris flows. J. Geophys. Res. Earth Surf. 2007, 112, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Deparis, J.; Jongmans, D.; Cotton, F.; Baillet, L.; Thouvenot, F.; Hantz, D. Analysis of rock-fall and rock-fall avalanche seismograms in the French Alps. Bull. Seismol. Soc. Am. 2008, 98, 1781–1796. [Google Scholar] [CrossRef] [Green Version]
- Helmstetter, A.; Garambois, S. Seismic monitoring of Schilienne rockslide (French Alps): Analysis of seismic signals and their correlation with rainfalls. J. Geophys. Res. Earth Surf. 2010, 115, 1–15. [Google Scholar] [CrossRef]
- Burjánek, J.; Gassner-Stamm, G.; Poggi, V.; Moore, J.R.; Fäh, D. Ambient vibration analysis of an unstable mountain slope. Geophys. J. Int. 2010, 180, 820–828. [Google Scholar] [CrossRef] [Green Version]
- Hibert, C.; Mangeney, A.; Grandjean, G.; Shapiro, N.M. Slope instabilities in Dolomieu crater, Réunion Island: From seismic signals to rockfall characteristics. J. Geophys. Res. Earth Surf. 2011, 116, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Dietze, M.; Mohadjer, S.; Turowski, J.M.; Ehlers, T.A.; Hovius, N. Seismic monitoring of small alpine rockfalls-validity, precision and limitations. Earth Surf. Dyn. 2017, 5, 653–668. [Google Scholar] [CrossRef] [Green Version]
- Colombero, C.; Comina, C.; Vinciguerra, S.; Benson, P.M. Microseismicity of an unstable rock mass: From field monitoring to laboratory testing. J. Geophys. Res. Solid Earth 2018, 123, 1673–1693. [Google Scholar] [CrossRef] [Green Version]
- Spillmann, T.; Maurer, H.; Green, A.G.; Heincke, B.; Willenberg, H.; Husen, S. Microseismic investigation of an unstable mountain slope in the Swiss Alps. J. Geophys. Res. Solid Earth 2007, 112, 1–25. [Google Scholar] [CrossRef]
- Manconi, A.; Picozzi, M.; Coviello, V.; De Santis, F.; Elia, L. Real-time detection, location, and characterization of rockslides using broadband regional seismic networks. Geophys. Res. Lett. 2016, 43, 6960–6967. [Google Scholar] [CrossRef]
- Provost, F.; Hibert, C.; Malet, J.P. Automatic classification of endogenous landslide seismicity using the Random Forest supervised classifier. Geophys. Res. Lett. 2017, 44, 113–120. [Google Scholar] [CrossRef]
- Feng, L.; Pazzi, V.; Intrieri, E.; Gracchi, T.; Gigli, G.; Tucci, G. Rockfall localization from seismic polarization considering multiple triaxial geophones and frequency bands. J. Mt. Sci. 2020, 17, 1541–1552. [Google Scholar] [CrossRef]
- Walter, M.; Joswig, M. Seismic characterization of slope dynamics caused by softrock-landslides: The Super-Sauze case study. In Proceedings of the International Conference on Landslide Processes: From Geomorphologic Mapping to Dynamic Modelling, Strasbourg, France, 6–7 February 2009. [Google Scholar]
- Arosio, D.; Zanzi, L.; Longoni, L.; Papini, M. Microseismic monitoring of an unstable rock face—Preliminary signal classification. In Proceedings of the Near Surface Geoscience 2015—21st European Meeting of Environmental and Engineering Geophysics, Turin, Italy, 6–10 September 2015; pp. 1–4. [Google Scholar]
- Senfaute, G.; Duperret, A.; Lawrence, J.A. Micro-seismic precursory cracks prior to rock-fall on coastal chalk cliffs: A case study at Mesnil-Val, Normandie, NW France. Nat. Hazards Earth Syst. Sci. 2009, 9, 1625–1641. [Google Scholar] [CrossRef]
- Got, J.L.; Mourot, P.; Grangeon, J. Pre-failure behaviour of an unstable limestone cliff from displacement and seismic data. Nat. Hazards Earth Syst. Sci. 2010, 10, 819–829. [Google Scholar] [CrossRef]
- Bottelin, P.; Jongmans, D.; Daudon, D.; Mathy, A.; Helmstetter, A.; Bonilla-Sierra, V.; Cadet, H.; Amitrano, D.; Richefeu, V.; Lorier, L.; et al. Seismic and mechanical studies of the artificially triggered rockfall at the Mount Néron (French Alps, December 2011). Nat. Hazards Earth Syst. Sci. Discuss. 2014, 2, 1505–1557. [Google Scholar] [CrossRef]
- Arosio, D.; Longoni, L.; Papini, M.; Zanzi, L. Analysis of microseismic activity within unstable rock slopes. In Modern Technologies for Landslide Monitoring and Prediction; Scaioni, M., Ed.; Springer: Berlin/Heidelberg, Germany, 2015; pp. 141–154. [Google Scholar]
- Taruselli, M.; Arosio, D.; Longoni, L.; Papini, M.; Zanzi, L. Raspberry Shake Sensor Field Tests for Unstable Rock Monitoring. In Proceedings of the 1st Conference on Geophysics for Infrastructure Planning Monitoring and BIM, The Hague, The Netherlands, 8–12 September 2019. [Google Scholar]
- Amitrano, D.; Arattano, M.; Chiarle, M.; Mortara, G.; Occhiena, C.; Pirulli, M.; Scavia, C. Microseismic activity analysis for the study of the rupture mechanisms in unstable rock masses. Nat. Hazards Earth Syst. Sci. 2010, 10, 831–841. [Google Scholar] [CrossRef] [Green Version]
- Levy, C.; Jongmans, D.; Baillet, L. Analysis of seismic signals recorded on a prone-to-fall rock column (Vercors massif, French Alps). Geophys. J. Int. 2011, 186, 296–310. [Google Scholar] [CrossRef] [Green Version]
- Colombero, C. Microseismic Strategies for Characterization and Monitoring of an Unstable Rock Mass. Ph.D. Thesis, University of Turin, Turin, Italy, 2017. [Google Scholar]
- Arosio, D.; Longoni, L.; Papini, M.; Boccolari, M.; Zanzi, L. Analysis of microseismic signals collected on an unstable rock face in the Italian Prealps. Geophys. J. Int. 2018, 213, 475–488. [Google Scholar] [CrossRef] [Green Version]
- Feng, L.; Pazzi, V.; Intrieri, E.; Gracchi, T.; Gigli, G. Joint detection and classification of rockfalls in a microseismic monitoring network. Geophys. J. Int. 2020, 222, 2108–2120. [Google Scholar] [CrossRef]
- Tonnellier, A.; Helmstetter, A.; Malet, J.P.; Schmittbuhl, J.; Corsini, A.; Joswig, M. Seismic monitoring of soft-rock landslides: The Super-Sauze and Valoria case studies. Geophys. J. Int. 2013, 193, 1515–1536. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Arosio, D.; Hojat, A.; Zanzi, L. Tomographic experiments for defining the 3D velocity model of an unstable rock slope to support microseismic event interpretation. Geosciences 2020, 10, 327. [Google Scholar] [CrossRef]
- Zhang, Z.; Arosio, D.; Hojat, A.; Zanzi, L. Refining microseismic event classification through hypocentre location. In Proceedings of the EAGE 3rd Asia Pacific Meeting Near Surface Geoscience & Engineering, Chiang Mai, Thailand, 2–5 November 2020. [Google Scholar]
- Zhang, Z.; Arosio, D.; Hojat, A.; Taruselli, M.; Zanzi, L. Construction of a 3D velocity model for microseismic event location on a monitored rock slope. In Proceedings of the EAGE-GSM 2nd Asia Pacific Meeting on Near Surface Geoscience and Engineering, Kuala Lumpur, Malaysia, 22–26 April 2019. [Google Scholar]
- Peterson, J.E.; Paulsson, B.N.P.; McEvilly, T.V. Applications of algebraic reconstruction techniques to crosshole seismic data. Geophysics 1985, 50, 1566–1580. [Google Scholar] [CrossRef]
- Lomax, A.; Michelini, A.; Curtis, A. Earthquake location, direct, global-search methods. In Encyclopedia of Complexity and Systems Science; Meyers, R.A., Ed.; Springer: New York, NY, USA, 2009; pp. 2449–2473. [Google Scholar]
- Font, Y.; Kao, H.; Lallemand, S.; Liu, C.S.; Chiao, L.Y. Hypocentre determination offshore of eastern Taiwan using the maximum intersection method. Geophys. J. Int. 2004, 158, 655–675. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rockfall Event | Npick | Nface | Nfar | Nunc | Rockfall Type |
|---|---|---|---|---|---|
| 1 | 4 | 4 | Single | ||
| 2 | 2 | 2 | Multiple | ||
| 3 | 5 | 5 | Multiple | ||
| 4 | 3 | 2 | 1 | Multiple | |
| 5 | 3 | 3 | Uncertain | ||
| 6 | 1 | 1 | Summit debris noise | ||
| 7 | 3 | 2 | 1 | Multiple | |
| 8 | 7 | 3 | 3 | 1 | Multiple |
| 9 | 2 | 2 | Multiple | ||
| 10 | 3 | 3 | Single |
| Location of Fracture Events | Reclassification | Number of Events |
|---|---|---|
| Inside rock mass | Fracture | 4 |
| Rock surface | Rockfall | 4 |
| Vertical boundary of the model | Far event | 2 |
| Near rock face | Suspected fracture | 8 |
| Lower boundary of the model | Suspected fracture (outside the area) | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Arosio, D.; Hojat, A.; Zanzi, L. Reclassification of Microseismic Events through Hypocenter Location: Case Study on an Unstable Rock Face in Northern Italy. Geosciences 2021, 11, 37. https://0-doi-org.brum.beds.ac.uk/10.3390/geosciences11010037
Zhang Z, Arosio D, Hojat A, Zanzi L. Reclassification of Microseismic Events through Hypocenter Location: Case Study on an Unstable Rock Face in Northern Italy. Geosciences. 2021; 11(1):37. https://0-doi-org.brum.beds.ac.uk/10.3390/geosciences11010037
Chicago/Turabian StyleZhang, Zhiyong, Diego Arosio, Azadeh Hojat, and Luigi Zanzi. 2021. "Reclassification of Microseismic Events through Hypocenter Location: Case Study on an Unstable Rock Face in Northern Italy" Geosciences 11, no. 1: 37. https://0-doi-org.brum.beds.ac.uk/10.3390/geosciences11010037