

OpenMetBuoy-v2021: An Easy-to-Build, Affordable, Customizable, Open-Source Instrument for Oceanographic Measurements of Drift and Waves in Sea Ice and the Open Ocean
 , ,
, ,  , , , , , , and
, , , , , , and
Abstract
:1. Introduction
2. General Design and Features of the Instrument v2021
2.1. Microcontroller
2.2. Wave Data Acquisition and Onboard Processing
| Algorithm 1: Sampling of vertical acceleration at a frequency of 10 Hz in a dedicated buffer, including raw data sampling and preaveraging, Kalman filtering, and vertical acceleration postaveraging. “Acc” stands for “Acceleration”, “Gyr” stands for “Gyroscope”, “Mag” stands for “Magnetometer”. The 3-sigma-average is an averaging filter rejecting measurements deviating from the rest of the sample by more than 3 standard deviations, which is used to discard occasional bad readings. The combination of high-frequency averaging of the raw input from 800 Hz to 100 Hz, Kalman filtering and vertical acceleration computation at 100 Hz, and vertical acceleration averaging from 100 Hz to 10 Hz, allows to balance the need for computational efficiency (by reducing the number of expensive Kalman filter updates) and accuracy (by running the raw data collection at high frequency and using all the data available through time averaging). |
| initialize empty BufferVerticalAcceleration10Hz; |
| initialize KalmanFilter100Hz; |
 |
| return BufferVerticalAcceleration10Hz; |
| Algorithm 2: Algorithm used for computing the Welch spectrum with energyconserving Hanning windowing. We have decided to use 21 segments with 75% overlap when computing the Welch averaging. Note that the exact value of the renormalization coefficients needed may depend on the specific FFT implementation used and the normalization convention that it defaults to. |
| input: BufferVerticalAcceleration10Hz, length 6 * 2048 samples; |
| initialize array HanningWelchSpectrum[RelevantIndexRange] with all elements = 0; |
| // the RelevantIndexRange includes the reduced span of the 2048-point FFT |
| // that covers frequencies between 0.05Hz and 0.5Hz, ie from fmin to fmax |
| initialize CurrentSignalSegmentStart = 0; |
| initialize CurrentSignalSegmentEnd = 2048; |
 |
| HanningWelchSpectrum[..] = HanningWelchSpectrum[..] / 21; |
| return HanningWelchSpectrum; |
2.3. Satellite Communications
2.4. Ongoing Instrument Variant: Cellular Communication
2.5. Battery Autonomy and Power-Saving Strategies
2.6. Total Cost and Assembly Process
3. Validation of the Instrument v2021
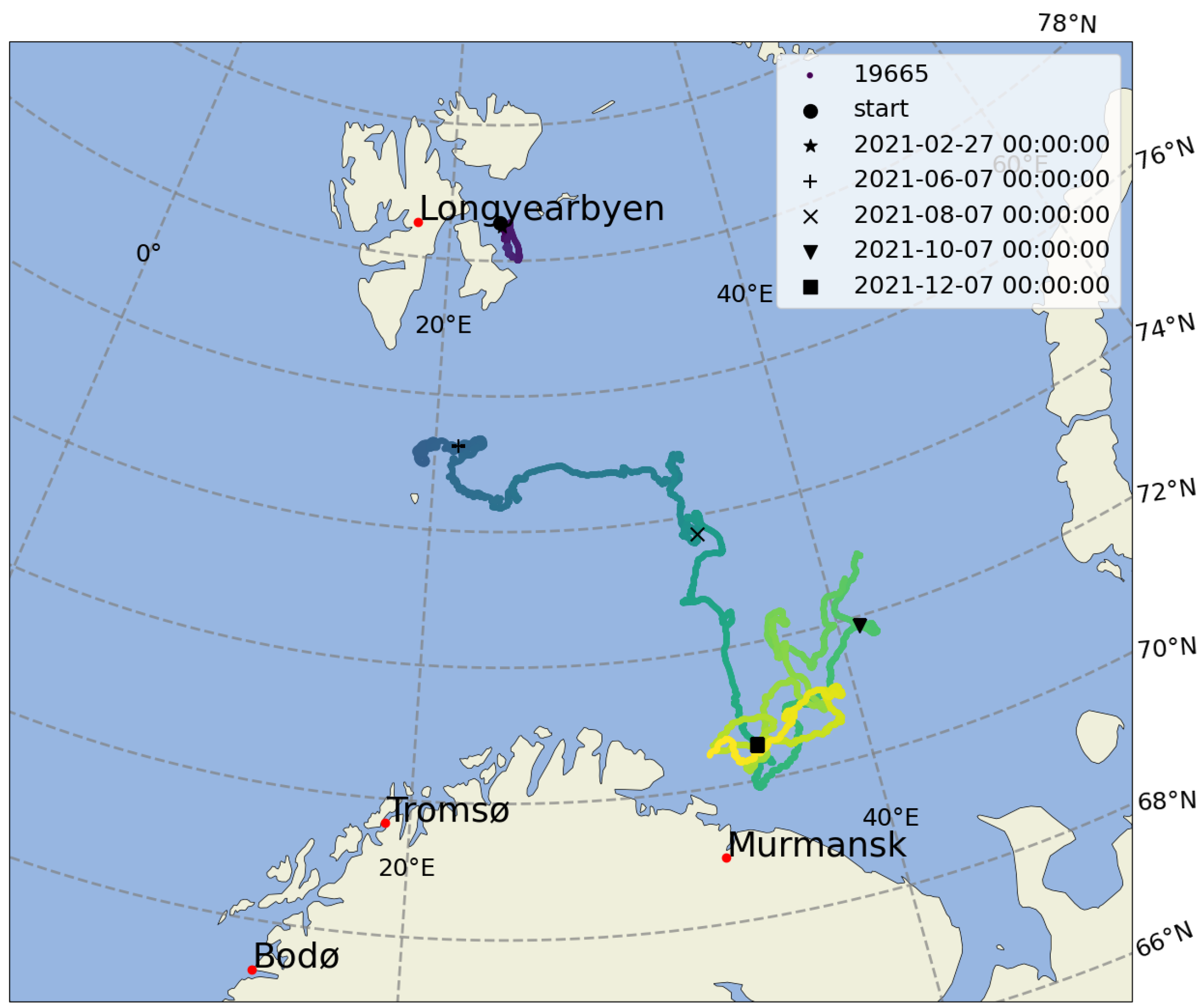
3.1. Autonomy and Satellite Communication Test in the Arctic: February 2021 Deployment
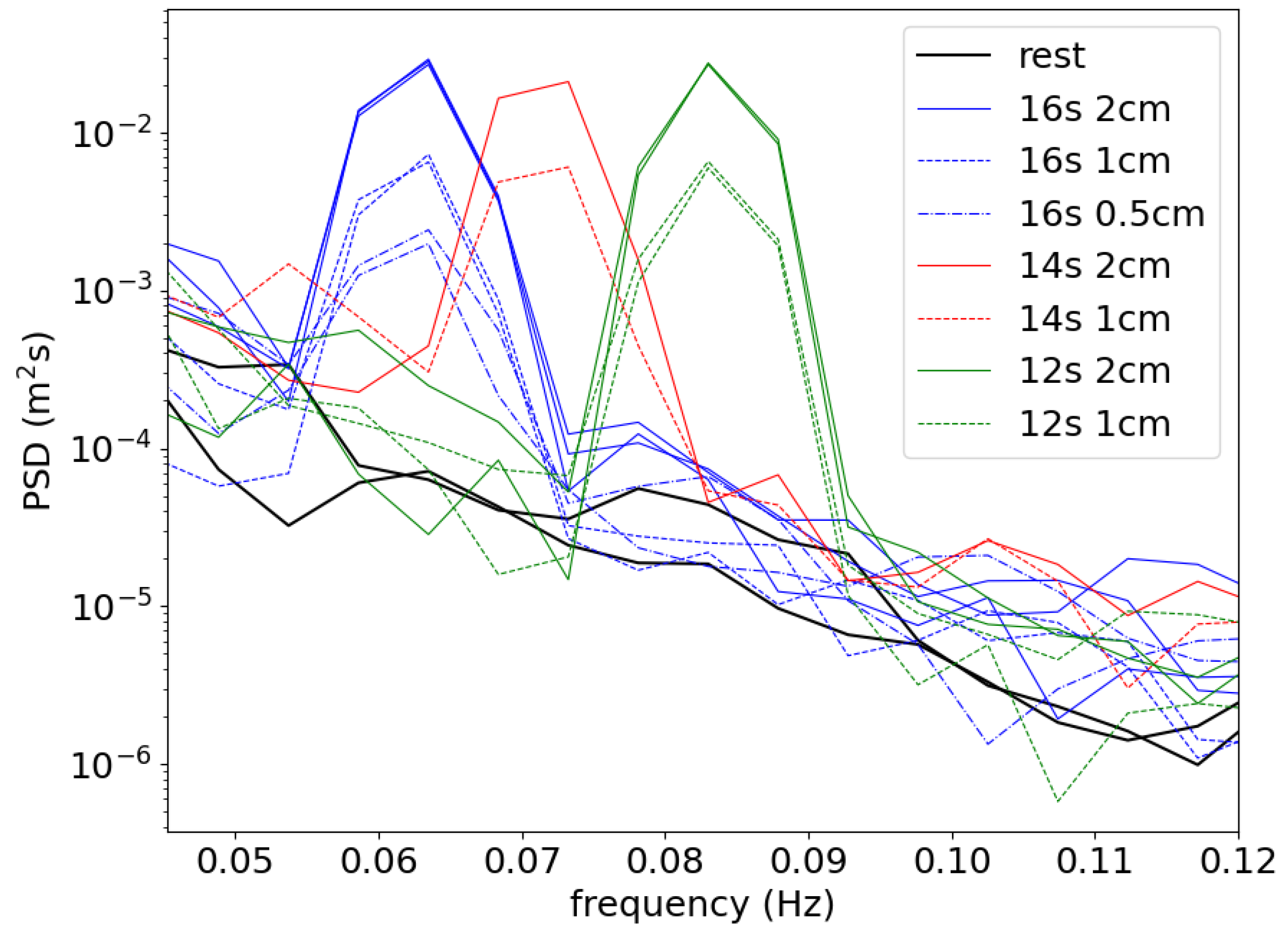
3.2. Experiments for Validation of Small-Amplitude, Low-Frequency Harmonic Vertical Displacement Measurements at the University of Tokyo’s Wave–Ice Tank Facility: July 2021 Laboratory Test
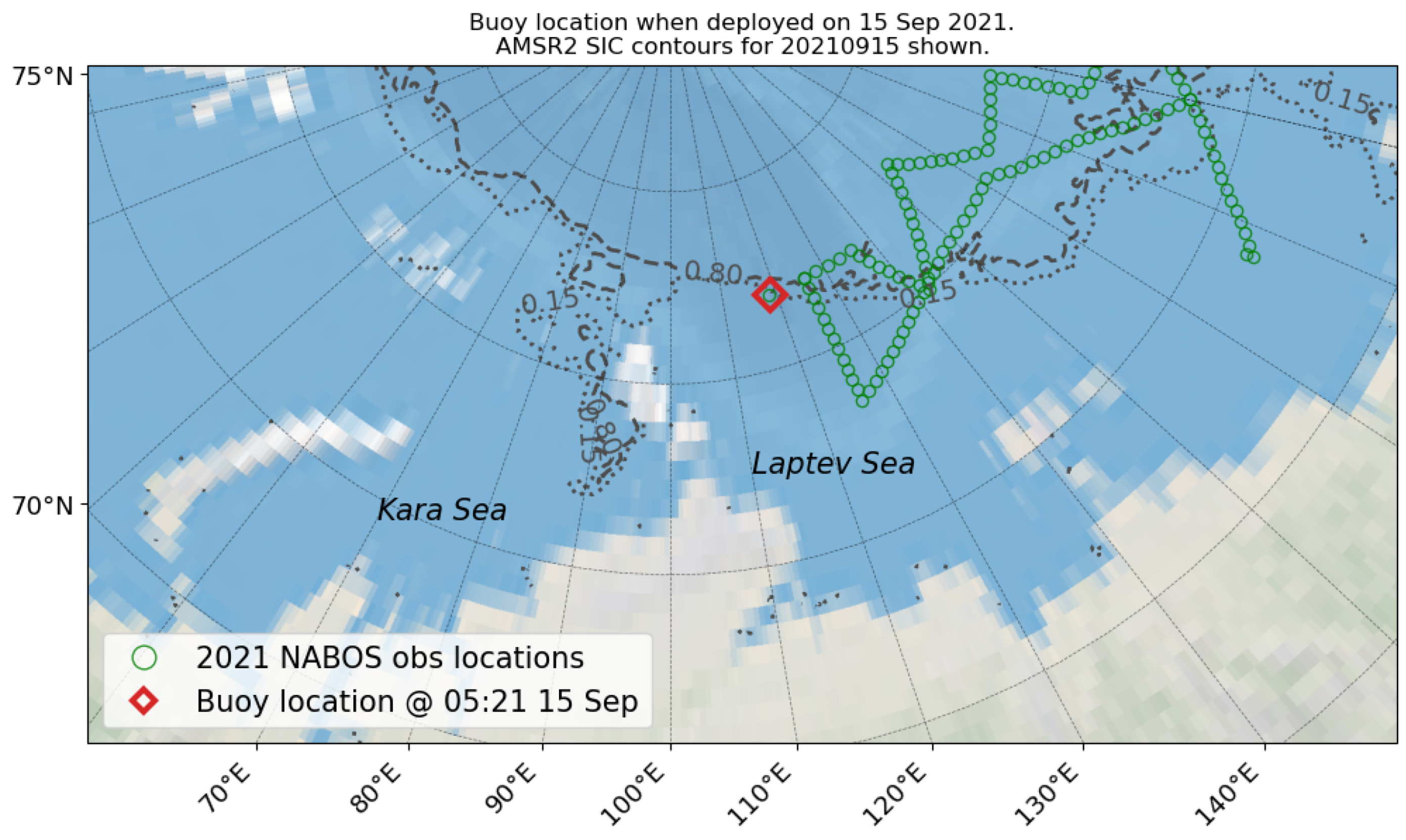
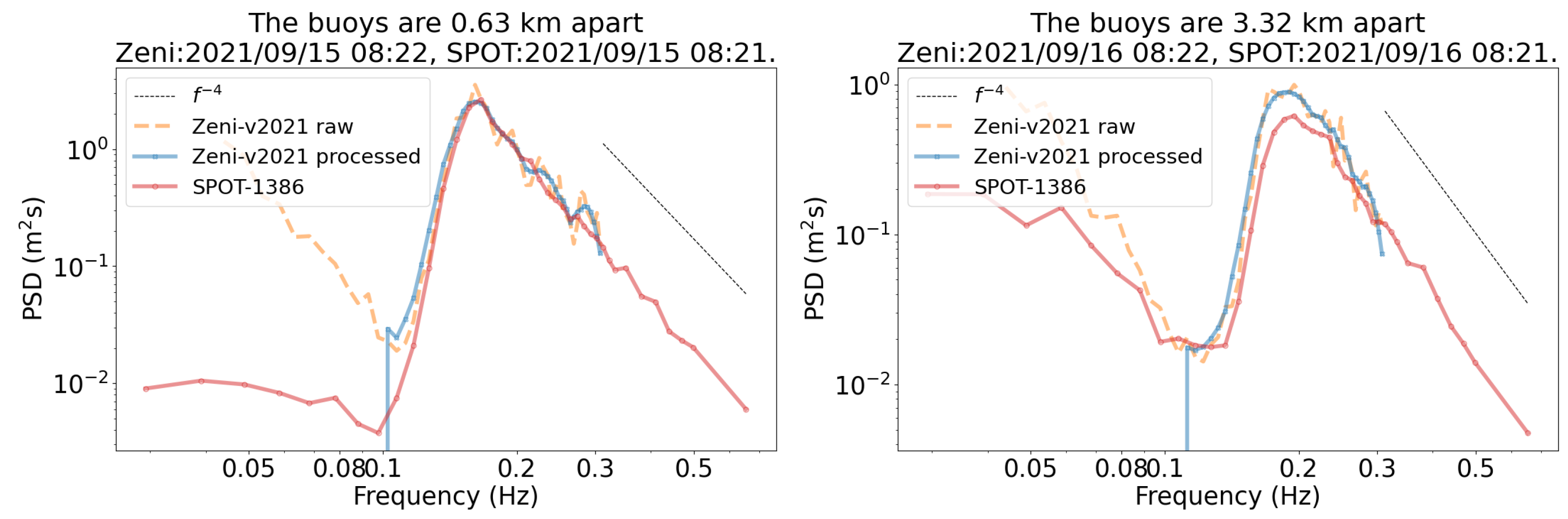
3.3. 2021 NABOS Expedition and Comparison with SOFAR Spotter Buoy in the Marginal Ice Zone in the Arctic: September 2021 Deployment
3.4. The “Floatenstein” Drifting Buoy in the Caribbeans: November 2021
4. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Correction Statement
Appendix A. Open-Source Release and Founding of an Open-Source Community
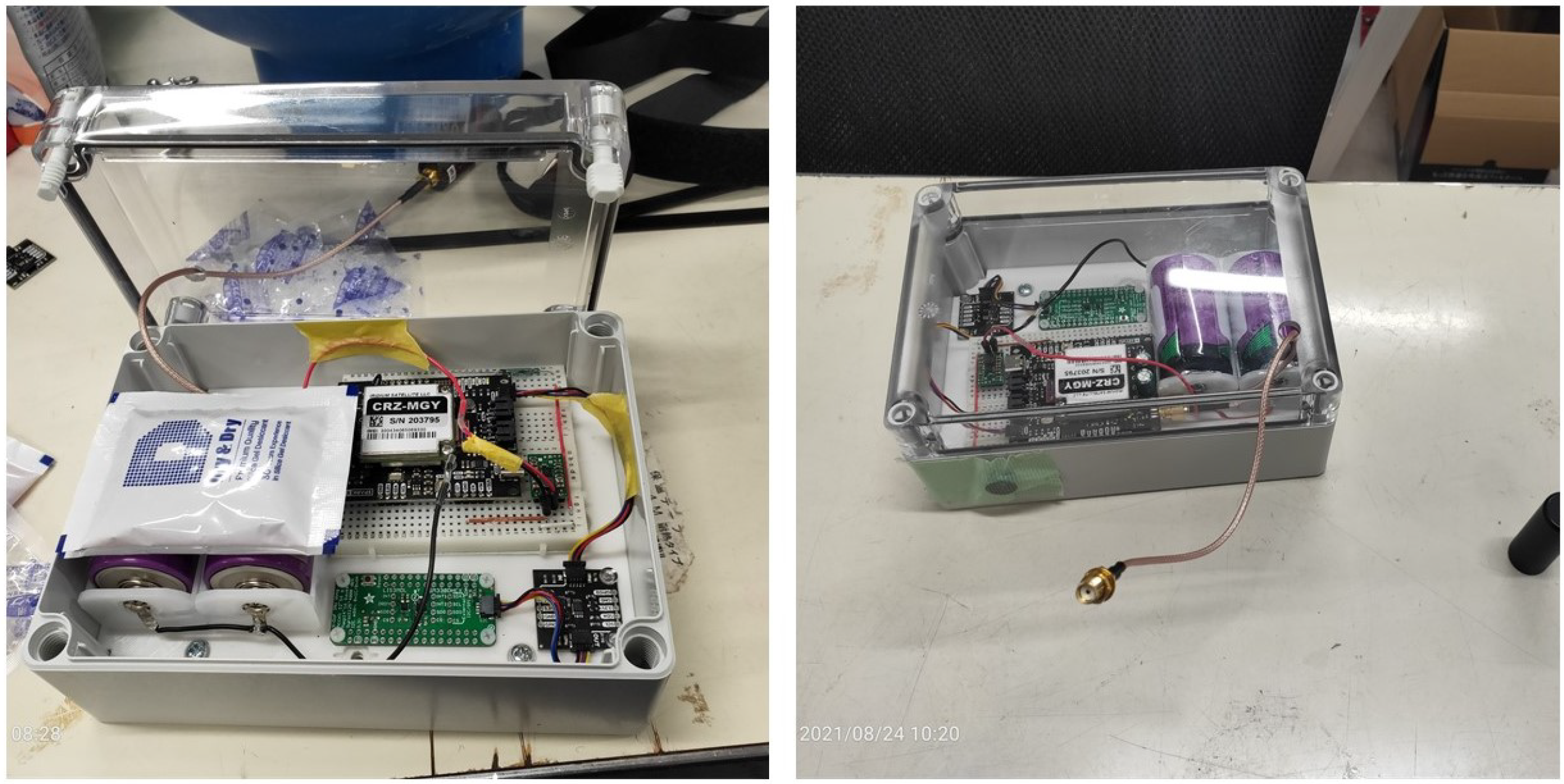
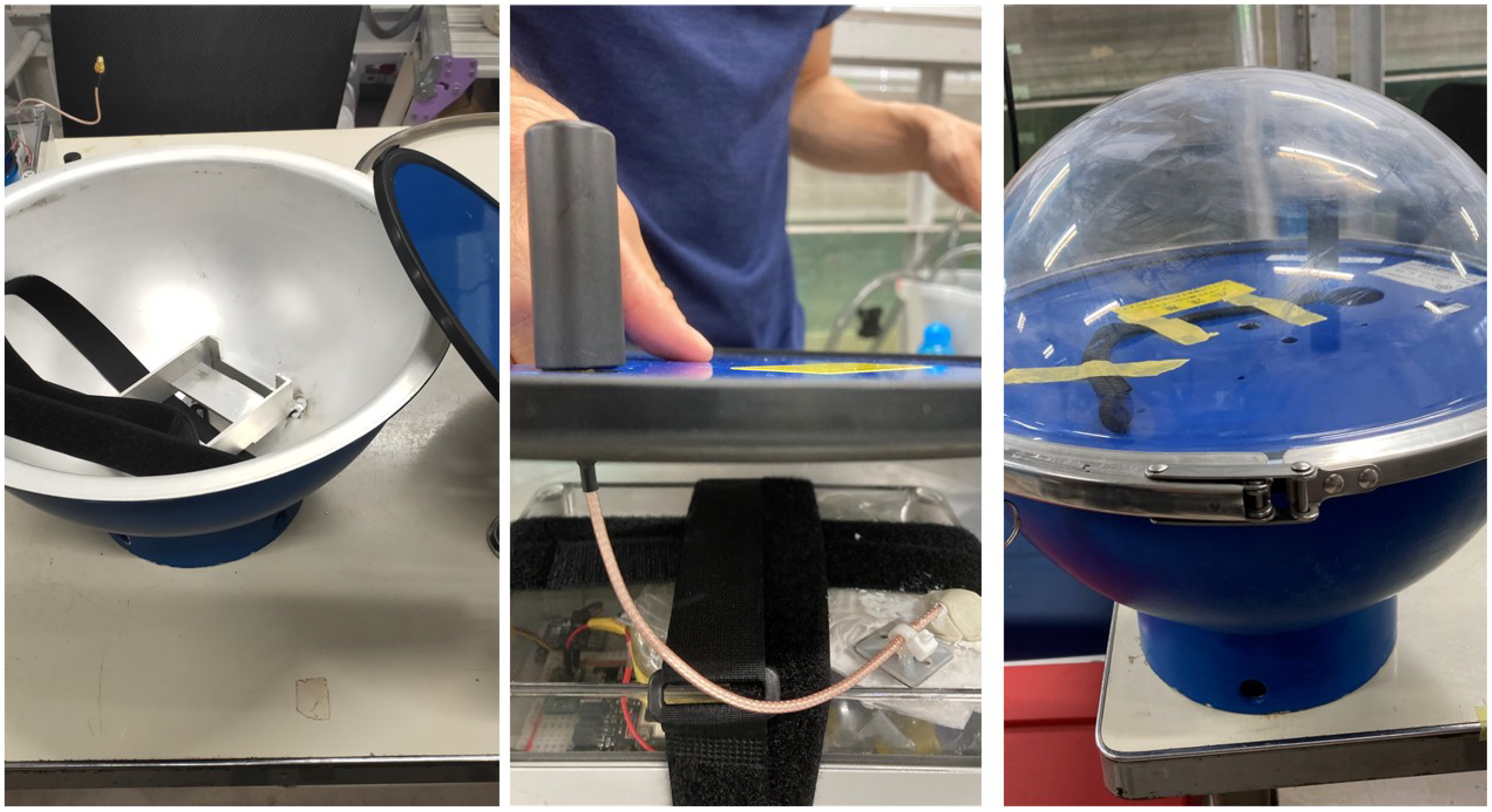
Appendix B. Zeni-v2021 Assembly for the 2021 NABOS Cruise


References
- Squire, V.A. Ocean wave interactions with sea ice: A reappraisal. Annu. Rev. Fluid Mech. 2020, 52, 37–60. [Google Scholar] [CrossRef]
- Smith, F.; Korobkin, A.; Parau, E.; Feltham, D.; Squire, V. Modelling of sea-ice phenomena. Philos. Trans. R. Soc. Math. Phys. Eng. Sci. 2018, 376, 20180157. [Google Scholar] [CrossRef]
- Zhao, X.; Shen, H.H. Three-layer viscoelastic model with eddy viscosity effect for flexural-gravity wave propagation through ice cover. Ocean. Model. 2018, 131, 15–23. [Google Scholar] [CrossRef]
- Golden, K.M.; Bennetts, L.G.; Cherkaev, E.; Eisenman, I.; Feltham, D.; Horvat, C.; Hunke, E.; Jones, C.; Perovich, D.K.; Ponte-Castaneda, P.; et al. Modeling sea ice. Not. Am. Math. Soc. 2020, 67, 1535–1555. [Google Scholar] [CrossRef]
- Roach, L.A.; Bitz, C.M.; Horvat, C.; Dean, S.M. Advances in modeling interactions between sea ice and ocean surface waves. J. Adv. Model. Earth Syst. 2019, 11, 4167–4181. [Google Scholar] [CrossRef]
- Sutherland, G.; Rabault, J.; Christensen, K.H.; Jensen, A. A two layer model for wave dissipation in sea ice. Appl. Ocean. Res. 2019, 88, 111–118. [Google Scholar] [CrossRef]
- Williams, T.D.; Rampal, P.; Bouillon, S. Wave–ice interactions in the neXtSIM sea-ice model. Cryosphere 2017, 11, 2117–2135. [Google Scholar] [CrossRef]
- Sree, D.K.; Law, A.W.K.; Shen, H.H. An experimental study of gravity waves through segmented floating viscoelastic covers. Appl. Ocean. Res. 2020, 101, 102233. [Google Scholar] [CrossRef]
- Rabault, J.; Sutherland, G.; Jensen, A.; Christensen, K.H.; Marchenko, A. Experiments on wave propagation in grease ice: Combined wave gauges and particle image velocimetry measurements. J. Fluid Mech. 2019, 864, 876–898. [Google Scholar] [CrossRef]
- Li, H.; Gedikli, E.D.; Lubbad, R. Laboratory study of wave-induced flexural motion of ice floes. Cold Reg. Sci. Technol. 2021, 182, 103208. [Google Scholar] [CrossRef]
- Sutherland, G.; Halsne, T.; Rabault, J.; Jensen, A. The attenuation of monochromatic surface waves due to the presence of an inextensible cover. Wave Motion 2017, 68, 88–96. [Google Scholar] [CrossRef]
- Marchenko, A.; Haase, A.; Jensen, A.; Lishman, B.; Rabault, J.; Evers, K.U.; Shortt, M.; Thiel, T. Laboratory Investigations of the Bending Rheology of Floating Saline Ice and Physical Mechanisms of Wave Damping In the HSVA Hamburg Ship Model Basin Ice Tank. Water 2021, 13, 1080. [Google Scholar] [CrossRef]
- Kohout, A.L.; Smith, M.; Roach, L.A.; Williams, G.; Montiel, F.; Williams, M.J.M. Observations of exponential wave attenuation in Antarctic sea ice during the PIPERS campaign. Ann. Glaciol. 2020, 61, 196–209. [Google Scholar] [CrossRef]
- Voermans, J.J.; Rabault, J.; Filchuk, K.; Ryzhov, I.; Heil, P.; Marchenko, A.; Collins, C.O., III; Dabboor, M.; Sutherland, G.; Babanin, A.V. Experimental evidence for a universal threshold characterizing wave-induced sea ice break-up. Cryosphere 2020, 14, 4265–4278. [Google Scholar] [CrossRef]
- Løken, T.K.; Rabault, J.; Jensen, A.; Sutherland, G.; Christensen, K.H.; Müller, M. Wave measurements from ship mounted sensors in the Arctic marginal ice zone. Cold Reg. Sci. Technol. 2021, 182, 103207. [Google Scholar] [CrossRef]
- Thomson, J.; Fan, Y.; Stammerjohn, S.; Stopa, J.; Rogers, W.E.; Girard-Ardhuin, F.; Ardhuin, F.; Shen, H.; Perrie, W.; Shen, H.; et al. Emerging trends in the sea state of the Beaufort and Chukchi seas. Ocean Model. 2016, 105, 1–12. [Google Scholar] [CrossRef]
- Løken, T.K.; Marchenko, A.; Ellevold, T.J.; Rabault, J.; Jensen, A. An investigation into the turbulence induced by moving ice floes. arXiv 2021, arXiv:2104.02378. [Google Scholar]
- Løken, T.K.; Ellevold, T.J.; de la Torre, R.G.R.; Rabault, J.; Jensen, A. Bringing optical fluid motion analysis to the field: A methodology using an open source ROV as a camera system and rising bubbles as tracers. Meas. Sci. Technol. 2021, 32, 095302. [Google Scholar] [CrossRef]
- Voermans, J.J.; Liu, Q.; Marchenko, A.; Rabault, J.; Filchuk, K.; Ryzhov, I.; Heil, P.; Waseda, T.; Nose, T.; Kodaira, T.; et al. Wave dispersion and dissipation in landfast ice: Comparison of observations against models. Cryosphere 2021, 2021, 1–26. [Google Scholar] [CrossRef]
- Sutherland, G.; Rabault, J. Observations of wave dispersion and attenuation in landfast ice. J. Geophys. Res. Ocean. 2016, 121, 1984–1997. [Google Scholar] [CrossRef]
- Rabault, J.; Sutherland, G.; Gundersen, O.; Jensen, A. Measurements of wave damping by a grease ice slick in Svalbard using off-the-shelf sensors and open-source electronics. J. Glaciol. 2017, 63, 372–381. [Google Scholar] [CrossRef]
- Marchenko, A.; Rabault, J.; Sutherland, G.; Collins, C.O.; Wadhams, P.; Chumakov, M. Field observations and preliminary investigations of a wave event in solid drift ice in the Barents Sea. In Proceedings of the International Conference on Port and Ocean Engineering under Arctic Conditions, Port and Ocean Engineering under Arctic Conditions, Busan, Korea, 11–16 June 2017. [Google Scholar]
- Marchenko, A.; Wadhams, P.; Collins, C.; Rabault, J.; Chumakov, M. Wave-ice interaction in the north-west barents sea. Appl. Ocean. Res. 2019, 90, 101861. [Google Scholar] [CrossRef]
- Johnson, M.A.; Marchenko, A.V.; Dammann, D.O.; Mahoney, A.R. Observing Wind-Forced Flexural-Gravity Waves in the Beaufort Sea and Their Relationship to Sea Ice Mechanics. J. Mar. Sci. Eng. 2021, 9, 471. [Google Scholar] [CrossRef]
- Herman, A.; Evers, K.U.; Reimer, N. Floe-size distributions in laboratory ice broken by waves. Cryosphere 2018, 12, 685–699. [Google Scholar] [CrossRef]
- Horvat, C.; Tziperman, E. The evolution of scaling laws in the sea ice floe size distribution. J. Geophys. Res. Ocean. 2017, 122, 7630–7650. [Google Scholar] [CrossRef]
- Herman, A. Sea-ice floe-size distribution in the context of spontaneous scaling emergence in stochastic systems. Phys. Rev. E 2010, 81, 066123. [Google Scholar] [CrossRef]
- Herman, A. Spectral wave energy dissipation due to under-ice turbulence. J. Phys. Oceanogr. 2021, 51, 1177–1186. [Google Scholar] [CrossRef]
- Voermans, J.; Babanin, A.; Thomson, J.; Smith, M.; Shen, H. Wave attenuation by sea ice turbulence. Geophys. Res. Lett. 2019, 46, 6796–6803. [Google Scholar] [CrossRef]
- Smith, M.; Thomson, J. Pancake sea ice kinematics and dynamics using shipboard stereo video. Ann. Glaciol. 2020, 61, 1–11. [Google Scholar] [CrossRef]
- Herman, A. Wave-Induced Surge Motion and Collisions of Sea Ice Floes: Finite-Floe-Size Effects. J. Geophys. Res. Ocean. 2018, 123, 7472–7494. [Google Scholar] [CrossRef]
- Herman, A.; Wenta, M.; Cheng, S. Sizes and shapes of sea ice floes broken by waves—A case study from the East Antarctic coast. Front. Earth Sci. 2021, 9, 390. [Google Scholar] [CrossRef]
- Li, J.; Babanin, A.V.; Liu, Q.; Voermans, J.J.; Heil, P.; Tang, Y. Effects of Wave-Induced Sea Ice Break-Up and Mixing in a High-Resolution Coupled Ice-Ocean Model. J. Mar. Sci. Eng. 2021, 9, 365. [Google Scholar] [CrossRef]
- Ardhuin, F.; Otero, M.; Merrifield, S.; Grouazel, A.; Terrill, E. Ice breakup controls dissipation of wind waves across Southern Ocean sea ice. Geophys. Res. Lett. 2020, 47, e2020GL087699. [Google Scholar] [CrossRef]
- Herman, A. Wave-induced stress and breaking of sea ice in a coupled hydrodynamic discrete-element wave–ice model. Cryosphere 2017, 11, 2711–2725. [Google Scholar] [CrossRef]
- Roach, L.A.; Horvat, C.; Dean, S.M.; Bitz, C.M. An emergent sea ice floe size distribution in a global coupled ocean-sea ice model. J. Geophys. Res. Ocean. 2018, 123, 4322–4337. [Google Scholar] [CrossRef]
- Horvat, C.; Tziperman, E. A prognostic model of the sea-ice floe size and thickness distribution. Cryosphere 2015, 9, 2119–2134. [Google Scholar] [CrossRef]
- Mosig, J.E.M.; Montiel, F.; Squire, V.A. Comparison of viscoelastic-type models for ocean wave attenuation in ice-covered seas. J. Geophys. Res. Ocean. 2015, 120, 6072–6090. [Google Scholar] [CrossRef]
- Cheng, S.; Rogers, W.E.; Thomson, J.; Smith, M.; Doble, M.J.; Wadhams, P.; Kohout, A.L.; Lund, B.; Persson, O.P.; Collins, C.O., III; et al. Calibrating a Viscoelastic Sea Ice Model for Wave Propagation in the Arctic Fall Marginal Ice Zone. J. Geophys. Res. Ocean. 2017, 122, 8770–8793. [Google Scholar] [CrossRef]
- Kohout, A.L.; Penrose, B.; Penrose, S.; Williams, M.J. A device for measuring wave-induced motion of ice floes in the Antarctic marginal ice zone. Ann. Glaciol. 2015, 56, 415–424. [Google Scholar] [CrossRef]
- Rabault, J.; Sutherland, G.; Ward, B.; Christensen, K.H.; Halsne, T.; Jensen, A. Measurements of waves in landfast ice using inertial motion units. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6399–6408. [Google Scholar] [CrossRef]
- Thomson, J.; Gemmrich, J.; Rogers, W.E.; Collins, C.O.; Ardhuin, F. Wave Groups Observed in Pancake Sea Ice. J. Geophys. Res. Ocean. 2019, 124, 7400–7411. [Google Scholar] [CrossRef]
- Kodaira, T.; Waseda, T.; Nose, T.; Sato, K.; Inoue, J.; Voermans, J.; Babanin, A. Observation of on-ice wind waves under grease ice in the western Arctic Ocean. Polar Sci. 2021, 27, 100567, Arctic Challenge for Sustainability Project (ArCS). [Google Scholar] [CrossRef]
- Ardhuin, F.; Stopa, J.; Chapron, B.; Collard, F.; Smith, M.; Thomson, J.; Doble, M.; Blomquist, B.; Persson, O.; Collins, C.O.; et al. Measuring ocean waves in sea ice using SAR imagery: A quasi-deterministic approach evaluated with Sentinel-1 and in situ data. Remote Sens. Environ. 2017, 189, 211–222. [Google Scholar] [CrossRef]
- Horvat, C.; Blanchard-Wrigglesworth, E.; Petty, A. Observing waves in sea ice with ICESat-2. Geophys. Res. Lett. 2020, 47, e2020GL087629. [Google Scholar] [CrossRef]
- Smit, P.; Houghton, I.; Jordanova, K.; Portwood, T.; Shapiro, E.; Clark, D.; Sosa, M.; Janssen, T. Assimilation of significant wave height from distributed ocean wave sensors. Ocean Model. 2021, 159, 101738. [Google Scholar] [CrossRef]
- Doble, M.; Mercer, D.J.; Meldrum, D.; Peppe, O.C. Wave measurements on sea ice: Developments in instrumentation. Ann. Glaciol. 2006, 44, 108–112. [Google Scholar] [CrossRef]
- Datawell Corporation. History of Datawell; Datawell Corporation: Haarlem, The Netherlands, 2001. [Google Scholar]
- Raghukumar, K.; Chang, G.; Spada, F.; Jannsen, T. Directional Spectrum Measurements by the Spotter: A New Developed Wave Buoy; University of New Orleans: New Orleans, LA, USA, 2019. [Google Scholar]
- Wilkinson, J.; Wadke, P.; Meldrum, D.; Mercer, D.; Doble, M.; Wadhams, P. The autonomous measurement of waves propagating across the Arctic Ocean. In Proceedings of the OCEANS 2007, Vancouver, BC, Canada, 29 September–4 October 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 1–7. [Google Scholar]
- Rabault, J.; Sutherland, G.; Gundersen, O.; Jensen, A.; Marchenko, A.; Breivik, Ø. An open source, versatile, affordable waves in ice instrument for scientific measurements in the Polar Regions. Cold Reg. Sci. Technol. 2020, 170, 102955. [Google Scholar] [CrossRef]
- Sutherland, G.; Aguiar, V.; Hole, L.R.; Rabault, J.; Dabboor, M.; Breivik, Ø. Determining an optimal transport velocity in the marginal ice zone using operational ice-ocean prediction systems. Cryosphere Discuss 2021. [Google Scholar] [CrossRef]
- Thomson, J. Wave breaking dissipation observed with “SWIFT” drifters. J. Atmos. Ocean. Technol. 2012, 29, 1866–1882. [Google Scholar] [CrossRef]
- Keating, D. Fetch-Limited Wave Growth in Nootka Sound. Senior Thesis, University of Washington, School of Oceanography, Seattle, WA, USA, 2016. [Google Scholar]
- Thomson, J.; Moulton, M.; de Klerk, A.; Talbert, J.; Guerra, M.; Kastner, S.; Smith, M.; Schwendeman, M.; Zippel, S.; Nylund, S. A new version of the SWIFT platform for waves, currents, and turbulence in the ocean surface layer. In Proceedings of the 2019 IEEE/OES Twelfth Current, Waves and Turbulence Measurement (CWTM), San Diego, CA, USA, 10–13 March 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–7. [Google Scholar]
- Defense Advanced Research Projects Agency. Ocean of Things; Defense Advanced Research Projects Agency: Arlington, VA, USA, 2021. [Google Scholar]
- Ambiq Inc. Ambiq Apollo3 BLU Microcontroller; Ambiq Inc.: Austin, TX, USA, 2021. [Google Scholar]
- Sparkfun Inc. Artemis Global Tracker; Sparkfun Inc.: Niwot, CO, USA, 2021. [Google Scholar]
- Pololu Inc. Pololu 3.3V Step-Up/Step-Down Voltage Regulator S7V8F3; Pololu Inc.: Las Vegas, NV, USA, 2021. [Google Scholar]
- Mouser Inc. MDRR-DT-15-25-F Reed Switch; Mouser Inc.: Mansfield, TX, USA, 2021. [Google Scholar]
- Nilsen, F.; Fer, I.; Baumann, T.M.; Breivik, Ø.; Czyz, C.; Frank, L.; Kalhagen, K.; Koenig, Z.; Kolås, E.H.; Kral, S.T.; et al. PC-2 Winter Process Cruise (WPC): Cruise Report; The Nansen Legacy Report Series; Septentrio Academic Publishing: Tromsø, Norway, 2021. [Google Scholar]
- Hori, M.; Yabuki, H.; Sugimura, T.; Terui, T. AMSR2 Level 3 Product of Daily Polar Brightness Temperatures and Product, 1.00. 2012. Available online: https://ads.nipr.ac.jp/data/meta/A20170123-003 (accessed on 23 July 2019).
- Waseda, T.; Webb, A.; Sato, K.; Inoue, J. Arctic Wave Observation by Drifting Type Wave Buoys in 2016. In Proceedings of the 27th International Ocean and Polar Engineering Conference, San Francisco, CA, USA, 25–30 June 2017; International Society of Offshore and Polar Engineers: Mountain View, CA, USA, 2017. [Google Scholar]
- Nose, T.; Webb, A.; Waseda, T.; Inoue, J.; Sato, K. Predictability of storm wave heights in the ice-free Beaufort Sea. Ocean Dyn. 2018, 68, 1383–1402. [Google Scholar] [CrossRef]
- Bohlinger, P.; Breivik, Ø.; Economou, T.; Müller, M. A novel approach to computing super observations for probabilistic wave model validation. Ocean Model. 2019, 139, 101404. [Google Scholar] [CrossRef]
- Yurovsky, Y.Y.; Dulov, V.A. MEMS-based wave buoy: Towards short wind-wave sensing. Ocean Eng. 2020, 217, 108043. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Activity Mode | Activation Frequency | Current (mA) | mWh Use per Hour | Time to Empty 2 Li D-Cells |
|---|---|---|---|---|
| sleep | when not active | 0.3 | 1.0 | 7.3 years |
| gnss measurement | 2 min twice per hour | 30 | 3.3 | 2.2 years |
| wave measurement | 20 min every 2 h | 8 | 4.4 | 1.6 years |
| iridium transmission | 1 message per hour | burst 250 mA | 10 | 0.7 years |
| typical use | 18.7 | 0.39 years ≈ 4.6 months |
| Component | Function | Price (USD) | Assembly Steps |
|---|---|---|---|
| Artemis Global Tracker | main board, MCU, GNSS, Iridium | 375 | ready to use |
| GNSS + Iridium antenna | passive antenna | 65 | screw on SMA cable |
| SMA extension cable 25 cm | extension cable for antenna | 5 | screw on tracker |
| Qwiic power switch | power on and off 9-dof | 7 | disable LED, connect 9-dof and tracker |
| ISM330DHCX + LIS3MDL | 9-dof sensor | 18 | connect to power switch |
| Qwiic cables (x2) | connect tracker, 9-dof, switch | 3 | connect power switch and 9-dof |
| 3.3V Regulator S7V8F3 | 3.3 V buck converter | 10 | solder to battery and tracker |
| 2 × D cell holders | house and connect batteries | 15 | solder to 3.3 V regulator |
| 2 × SAFT LSH20 | power supply | 35 | put in cell holders |
| reed MDRR-DT-20-35-F | magnetic switch | 3 | solder between battery and regulator |
| magnet | turn magnetic switch on/off | 1 | mount outside housing |
| housing box | housing, IP68 | 20 | mount the electronics inside |
| misc: glue, wire | small extras | 5 | get the design assembled |
| total | fully functional instrument | 562 | 0.5 h/instruments, producing 10 |
| Functionality | Credits/Message | Messages/Hour (Default) | Price/Month (USD) |
|---|---|---|---|
| iridium subscription fee 1 month | N/A | N/A | 16 |
| GNSS position data | 2 | 0.3 | 26 |
| wave spectrum data | 3 | 0.5 | 66 |
| total | N/A | N/A | 108 |
| Wavemaker Signal: Amplitude, Period | Reported Buoy Amplitude (cm, Averaged) | Reported Buoy Peak Period (s) | Frequency Bin Closest to Peak Frequency | Number of Cases |
|---|---|---|---|---|
| 2 cm, 16 s | 2.104 | 15.75 | yes | 4 |
| 1 cm, 16 s | 1.040 | 15.75 | yes | 2 |
| 0.5 cm, 16 s | 0.62 | 15.75 | yes | 2 |
| 2 cm, 14 s | 1.954 | 13.65 | yes | 1 |
| 1 cm, 14 s | 1.053 | 13.65 | yes | 1 |
| 2 cm, 12 s | 2.022 | 12.05 | yes | 2 |
| 1 cm, 12 s | 0.970 | 12.05 | yes | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rabault, J.; Nose, T.; Hope, G.; Müller, M.; Breivik, Ø.; Voermans, J.; Hole, L.R.; Bohlinger, P.; Waseda, T.; Kodaira, T.; et al. OpenMetBuoy-v2021: An Easy-to-Build, Affordable, Customizable, Open-Source Instrument for Oceanographic Measurements of Drift and Waves in Sea Ice and the Open Ocean. Geosciences 2022, 12, 110. https://0-doi-org.brum.beds.ac.uk/10.3390/geosciences12030110
Rabault J, Nose T, Hope G, Müller M, Breivik Ø, Voermans J, Hole LR, Bohlinger P, Waseda T, Kodaira T, et al. OpenMetBuoy-v2021: An Easy-to-Build, Affordable, Customizable, Open-Source Instrument for Oceanographic Measurements of Drift and Waves in Sea Ice and the Open Ocean. Geosciences. 2022; 12(3):110. https://0-doi-org.brum.beds.ac.uk/10.3390/geosciences12030110
Chicago/Turabian StyleRabault, Jean, Takehiko Nose, Gaute Hope, Malte Müller, Øyvind Breivik, Joey Voermans, Lars Robert Hole, Patrik Bohlinger, Takuji Waseda, Tsubasa Kodaira, and et al. 2022. "OpenMetBuoy-v2021: An Easy-to-Build, Affordable, Customizable, Open-Source Instrument for Oceanographic Measurements of Drift and Waves in Sea Ice and the Open Ocean" Geosciences 12, no. 3: 110. https://0-doi-org.brum.beds.ac.uk/10.3390/geosciences12030110