Rigid-Body Dynamics Model
The nonlinear dynamics model of the AUV is formulated in a compact matrix form [
14] as:
where
is the matrix of the rigid-body mass. In submerged vehicles it is defined as
with
the constant rigid-body inertia matrix and
is the added inertia matrix. The
is parametrized in the form:
Further,
is the mass of the vehicle,
is a 3 × 3 identity matrix,
is the matrix cross product operator,
is the vector of distances of the centre of gravity from the origin of the body-fixed reference frame (in the considered model the centre of buoyancy), and
is the inertia tensor with respect to the body-fixed reference frame origin. The
is the added mass matrix (or added inertia matrix) used to model the effect of the water displaced by the vehicle during motion. It is composed of a set of constant coefficients, such that
and:
The coefficients for the previous added inertia matrix
, e.g.,
, are provided in the AUV specifications. Note that for an AUV this matrix is strictly positive. In Equation (A5) the term
is the matrix of Coriolis and centripetal terms. Two terms are used to describe these effects, so that
with
representing the skew-symmetrical parametrization of constant mass:
and
represents the effect of the added mass due to the centripetal and Coriolis effects, also defined according to the skew-symmetrical parametrization:
with terms
(
) computed as for the added mass matrix. The extended form for of
has the same structure as
.
In addition, in Equation (A5) the term
is the vector of restoring forces and moments. The gravitational force is defined as
(that is the weight force acting on the vehicle due to the gravity
acting on the mass
), the buoyancy is
, where
is the fluid density and
is the total volume of fluid displaced by the vehicle. Let
denote the position of the centre of gravity and
denote the centre of buoyancy with respect to the body-fixed reference frame. The restoring forces and moments
may then be computed as:
The matrix of hydrodynamic damping terms is
in Equation (A5). The hydrodynamic damping factors for marine vehicles may be classified as potential damping, viscous damping, wave drift damping, vortex shedding damping and lifting forces. The proposed model considers a nonlinear representation of damping effects with respect to instantaneous vehicle velocities, such that
with
The set of actuators include the main thruster, side thrusters (front and rear) and fins (stern planes and rudders). They are characterized in terms of the type, the position and the orientation with respect to the vehicle-fixed reference frame and described below.
The main thruster is positioned at the stern of the vehicle, aligned with the
x-axis of the body-fixed reference frame, but it cannot provide forces, or moments, different from the force over this axis. The force generated by this thruster depends on the control action and its dynamics include different nonlinearities. The generated force
is modelled by the following relationship:
where
is the water density,
is the control input (the required rotation speed),
is the nominal thruster diameter,
represents the nonlinear relationship between actual speed and control input such that:
where
, and
is the vehicle forward speed with respect to the water,
is the Laplace variable,
is the nominal frequency of the first-order actuator dynamic system representing the thruster-dynamics and
is the damping factor of the first-order actuator representing the thruster transition dynamics. The main rear thruster has two discontinuities in its dynamics, relating to the saturation (±2000 [rpm]) and dead zone (±400 [rpm]) in the control input channel.
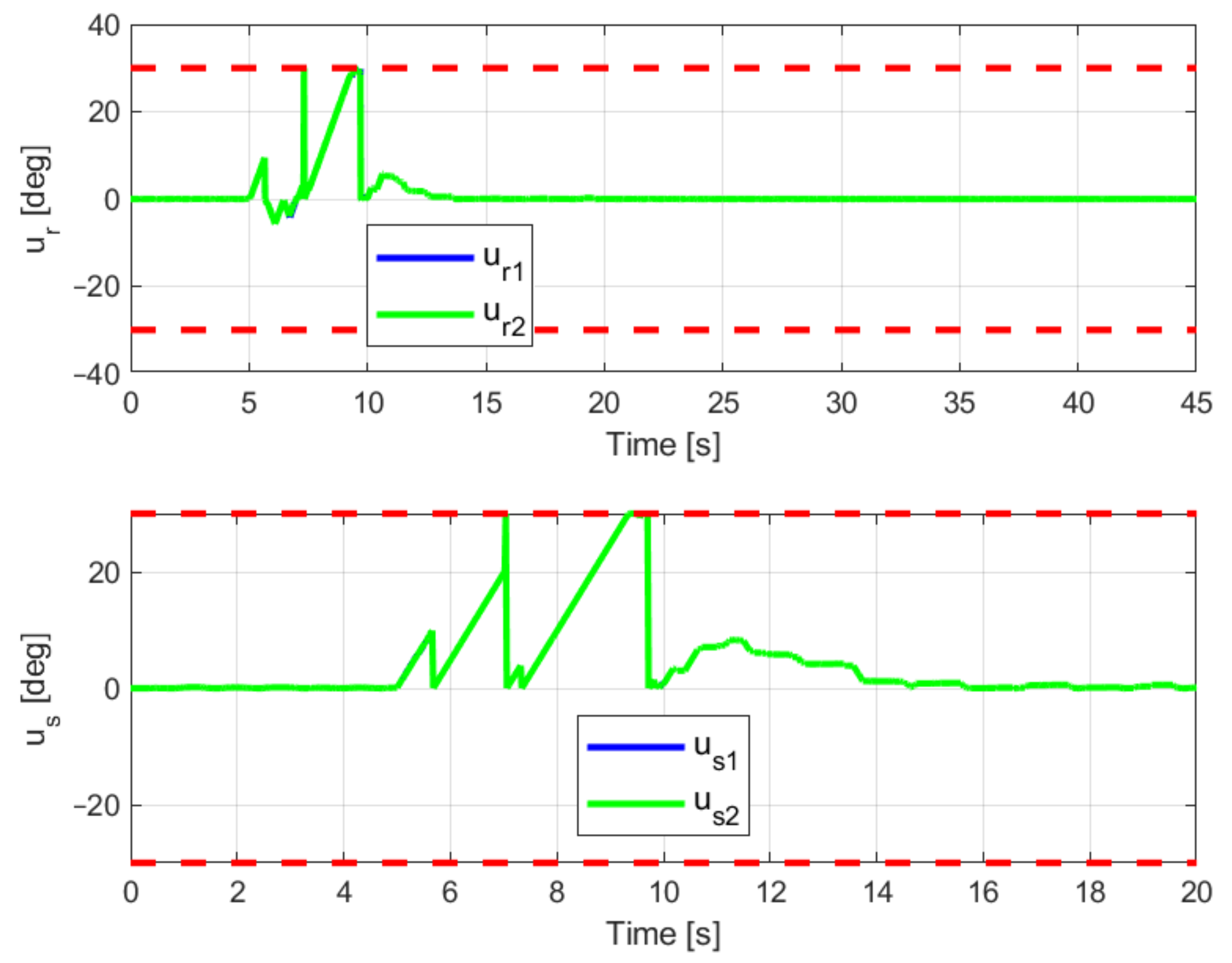
The fins are placed at the rear of the vehicle, near the main rear thruster. The dynamic response of the fins is directly related to vehicle pose and velocities, according to a set of relationships determined by the fins’ lift coefficients. The force and moment provided by the rudder fins (
and
), stern planes (
and
) and their combined effects (
) are:
The control input for the fins is the deviation angle with respect to the zero position (in the body-fixed reference frame, and for rudders and stern-planes, respectively), and it is subject to saturation on maximum/minimum values (±30 degrees) according to the specifications provided. The dynamics of the fins’ angular position response, with respect to the reference provided by the control system, are represented by a second-order system with a natural frequency and a damping factor .
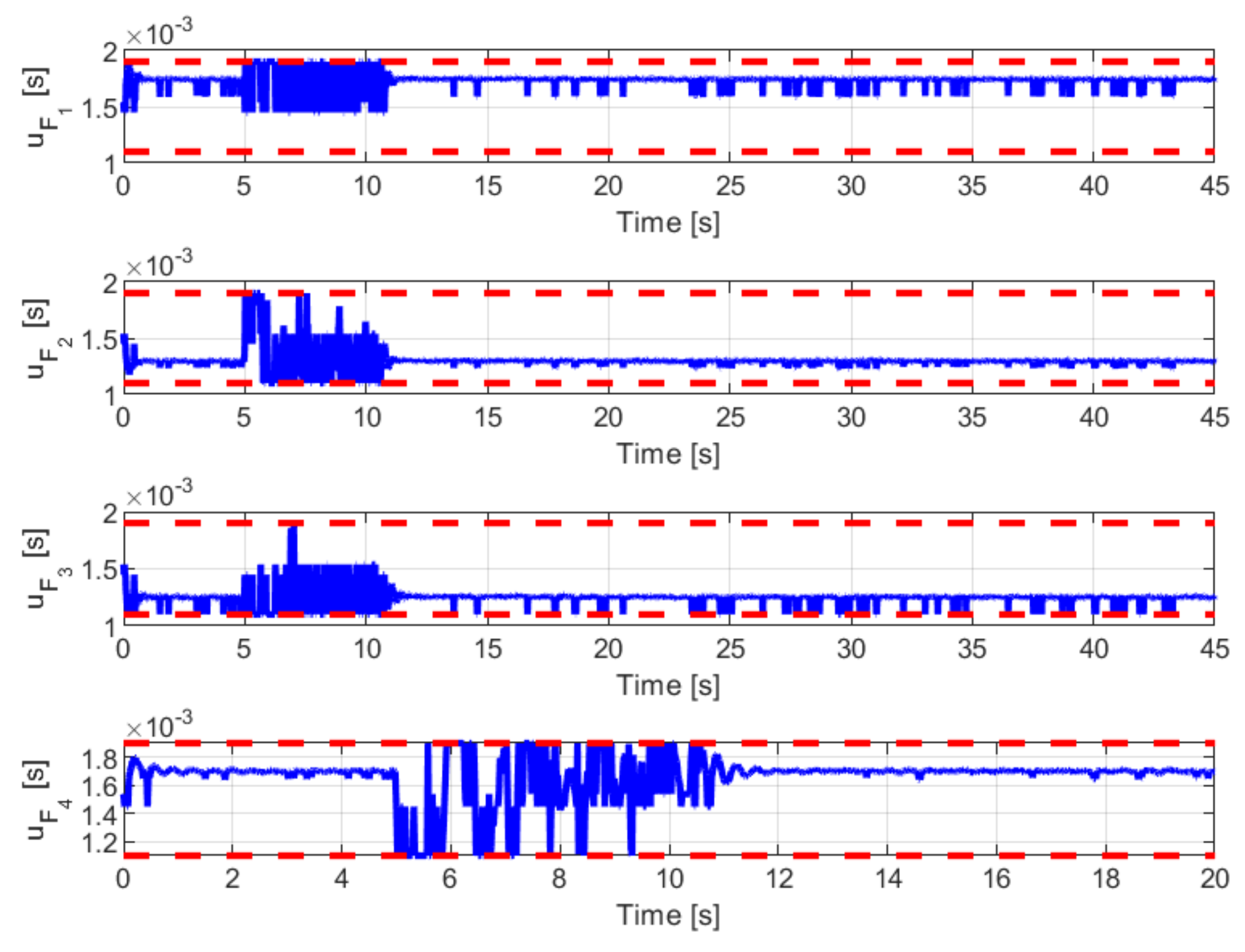
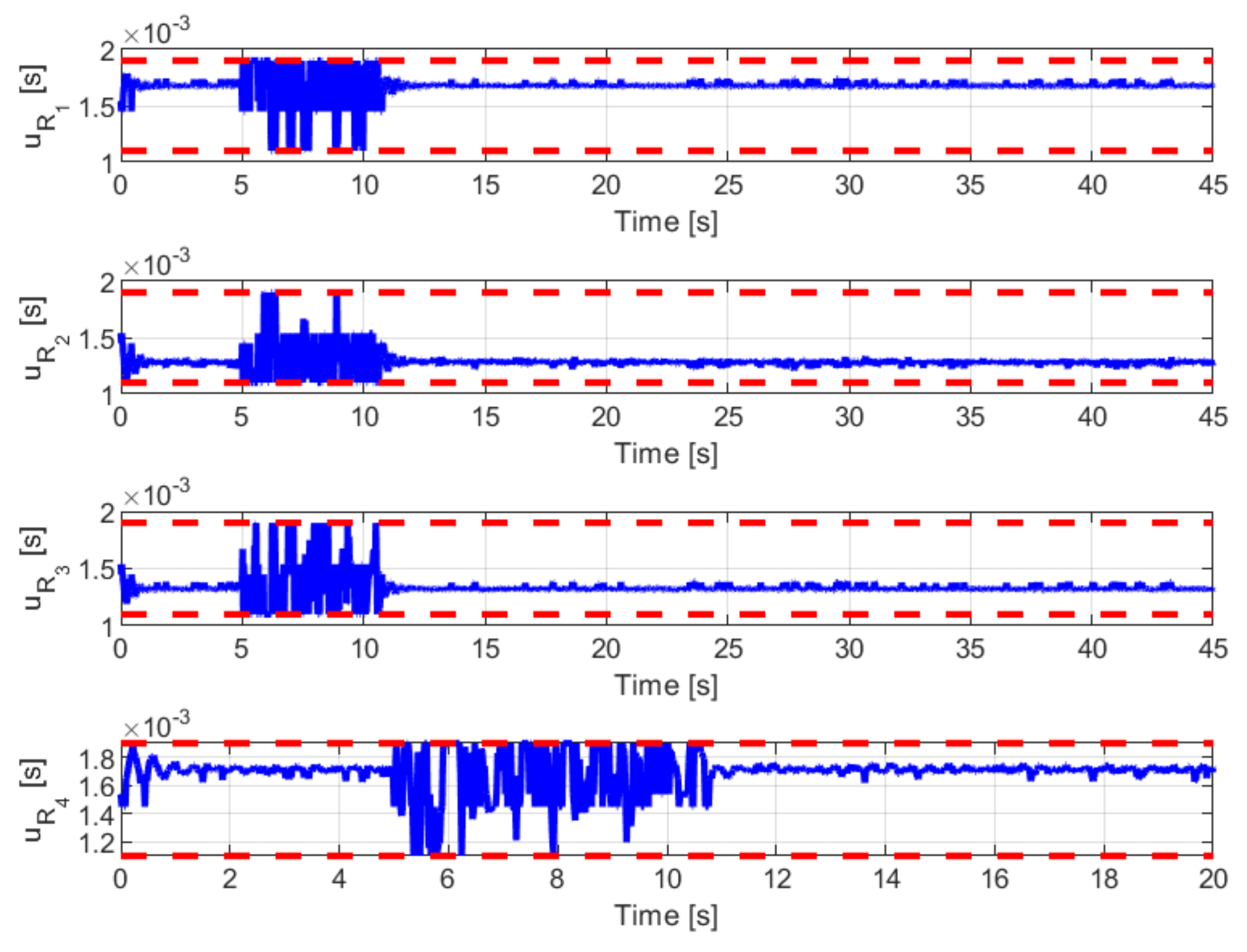
The side thrusters are placed on the side of the vehicle’s hull to drive the AUV at low speeds when the forward speed of the vehicle is too low for the fins to provide an effective control action. Because of the orientation of the thruster set, with respect to the body-fixed reference frame, the effort provided by each thruster can be split into two components. Given the position and the orientation of the thrusters, the combination of the thrusters’ effort may be modelled by the following relationships:
with
, where
and
degrees is the angular position of thrusters (for
degrees
),
is the vector of forces and moments provided by the side thrusters in the body-fixed reference frame. The vector of forces provided by each thruster is computed according to the nonlinear characteristic of this actuator, converting the PWM duty-cycle (provided by the controller) to the thruster effort. These thrusters also include a saturation on the maximum force, and a symmetric dead-band cantered on the zero speed (equivalent to 1500 μs PWM input signal). The side thruster model is affected by a delay 0.01875 s and has the following dynamics model:
The thrust [N] provided by the actuator is defined in terms of the control input signal and . The characteristic is defined by the following:
If then , and ;
If then , and ;
If then , and .



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












