1. Introduction
The recent decades have seen an increasing interest and resulting demand for development of Arctic ships and offshore structures. These are used for exploration and extraction of natural resources, and for navigation throughout the Arctic and Antarctic corridors [
1,
2]. A number of different ice features will generally be of concern in these areas, such as ice ridges and icebergs. These features are assumed to represent a major hazard to the integrity of ship hulls and may accordingly govern the design loads [
3].
Design of ships for Polar regions is mainly based on rules and regulations, such as the International Maritime Organization (IMO) Polar code, the Finnish–Swedish Ice Class Rules (FSICR), the International Association of Classification Societies (IACS) Polar Class rules, etc. These codes and rules are primarily based on experience and deterministic solutions, and they are attractive in connection with practical design due to their simplicity [
4]. However, ship-ice loads are random by nature [
5,
6]. This randomness is due to the inherent variability of ice conditions (such as the physical ice characteristics including the mechanical properties) and also by the great span of ship-ice interaction processes [
7]. Accordingly, probabilistic methods are required in order to account for the inherent randomness of the ship-ice loads. Hence, reliability-based design methods based on proper representation of the statistical variation of ice loads could serve to supplement current rule-based design methods.
Regarding structural design principles, criteria corresponding to the Ultimate Limit State (ULS) are intended to ensure that no extensive structural damage is likely to take place during the intended lifetime of the structure. For Polar ships, criteria associated with the ULS condition imply that the ship should have the capacity to resist the ice load actions corresponding to a specific return period (or a specific exceedance probability) without critical damage taking place. This applies both to the local and the global load effects within the vessels [
8]. In general, it is assumed that the most accurate approach for estimation of the extreme ice loads is to perform a full long-term response analysis. As part of this analysis, each individual ice condition is weighted by the associated probability of occurrence. However, this type of analysis is usually time-consuming since high-fidelity numerical response analyses are usually involved [
9].
Regarding the Accidental Limit State, a range of different design scenarios also need to be analyzed. Since highly nonlinear structural response behavior is generally involved, the associated computational efforts easily become tremendous. Particularly for the case of so-called shared energy design, complex dynamic interaction processes involving both the ice mass and the floating structure must be modeled in a proper way. This requires careful building of computational models and numerical algorithms [
10].
In order to make ULS and ALS design procedures more efficient, the environmental contour method offers an effective alternative to the full long-term analysis. The contour will then represent a set of environmental conditions (presently corresponding to ice ridge and iceberg characteristics) for a given vessel lifetime [
11]. The extreme response which corresponds to the ice loads for this specified “return period” can subsequently be calculated by identifying the critical ice conditions along the generated environmental contour. The advantage of this approach lies in the fact that the environmental characteristics are uncoupled from the structural response during the first step of the analysis [
12]. Numerical simulations (in some cases supplemented by experiments) are then only required for a very limited number of conditions that are located on the contour in order to identify the most critical structural response level.
The environmental contour is generally identified by application of the IFORM (inverse first order reliability method). The calculations are based on the joint probability distribution associated with the relevant environmental parameters [
13]. The concept of environmental contours has been widely used in the field of offshore engineering, e.g., in connection with hydrodynamic loading [
11]. Typically, the joint statistics of wave height and peak period are described by a conditional modeling approach. For a given return period, a circle with the desired radius is created in a normalized Gaussian space, and based on an inverse mapping (IFORM) involving, e.g., the Rosenblatt transformation, the circle is mapped into the corresponding environmental contour as a continuous functional relationship between the relevant physical parameters. In addition to the environmental contours based on IFORM, alternative similar approaches are also available [
14,
15].
In this work, application of environmental contours is considered in relation to ice ridge and iceberg characteristics. Estimation of the extreme response due to the associated ice loads is also addressed. As a first step, key parameters associated with ice ridges and icebergs for estimation of the resulting ship-ice loads are identified by consideration of the ship–ice interaction process. Statistical models are introduced in order to characterize the variability of these parameters. By application of the inverse cumulative distribution functions of these key parameters, environmental design contours for a given return period are established.
The main objective of the present paper is to extend the methodology associated with recent application of environmental contour line methods such that they can also manage to include accidental load conditions. It is aimed at establishing a unified basis for how this can be accomplished.
In order to achieve this, relevant structural design and acceptance criteria must also be revisited since these will be different for accidental conditions as compared to ice loads with a more “regular” rate of occurrence (i.e., shorter return periods). Accidental scenarios can be widely different, and relevant design criteria are accordingly not well-established. Recent design codes also tend to move towards a more goal-based approach rather than the prescriptive rules of today, which implies less specific and detailed design requirements.
It is believed that the contour design approach will lead to increasingly efficient identification of critical design conditions. This in turn also implies great savings in terms of number of complex and time-consuming nonlinear numerical response-analyses that will be required.
2. The Ultimate and the Accidental Limit States
As discussed above, the “permissible” structural damage is very different for the Ultimate versus the Accidental Limit State. This is thoroughly discussed, e.g., in [
4,
7,
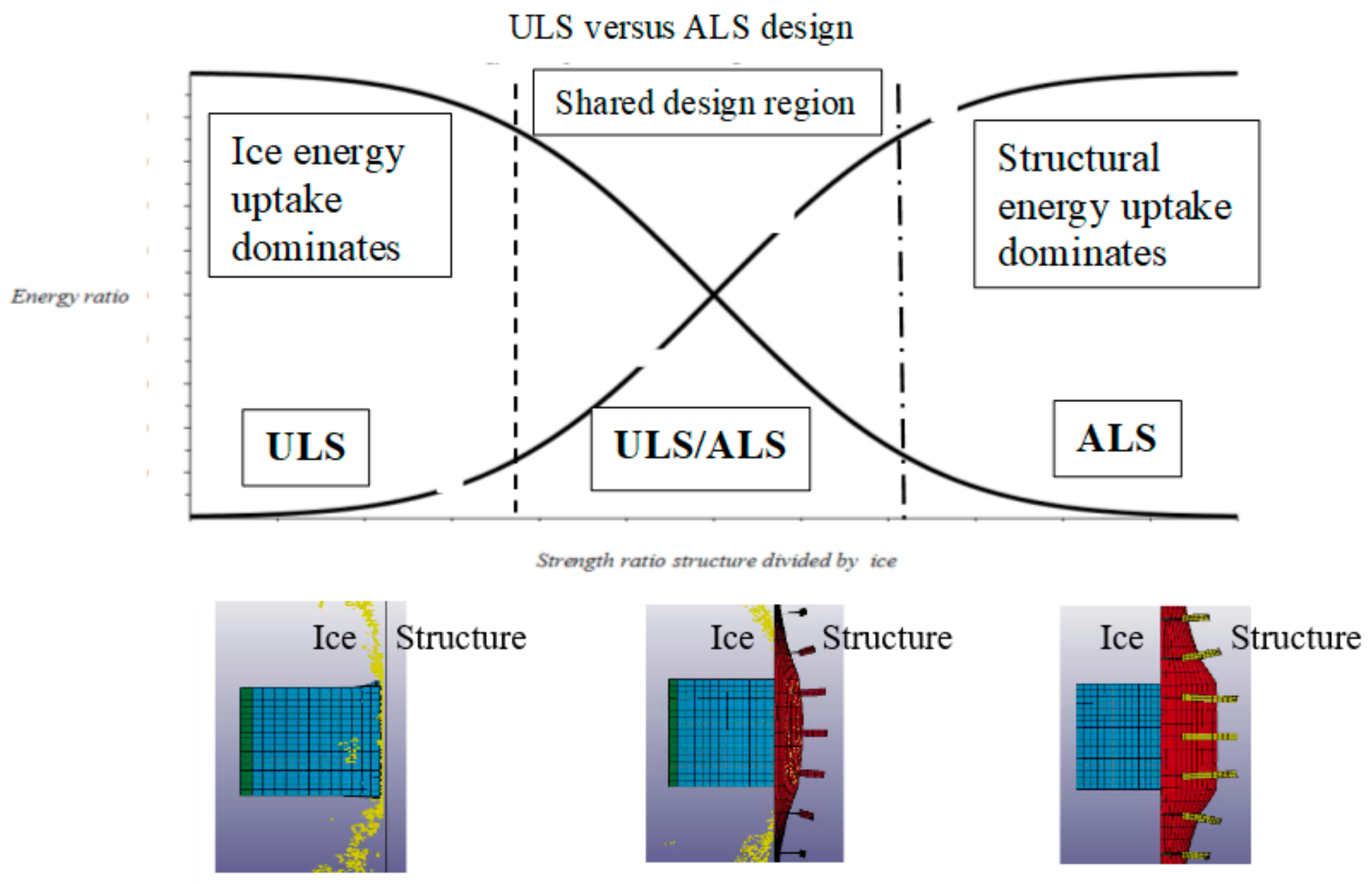
10]. A further illustration is provided by
Figure 1, where relative ULS deformations are exemplified to the left and ALS deformations to the right. It is seen that the deformation of the ice is strongly influenced by the structural strength and the corresponding structural behavior.
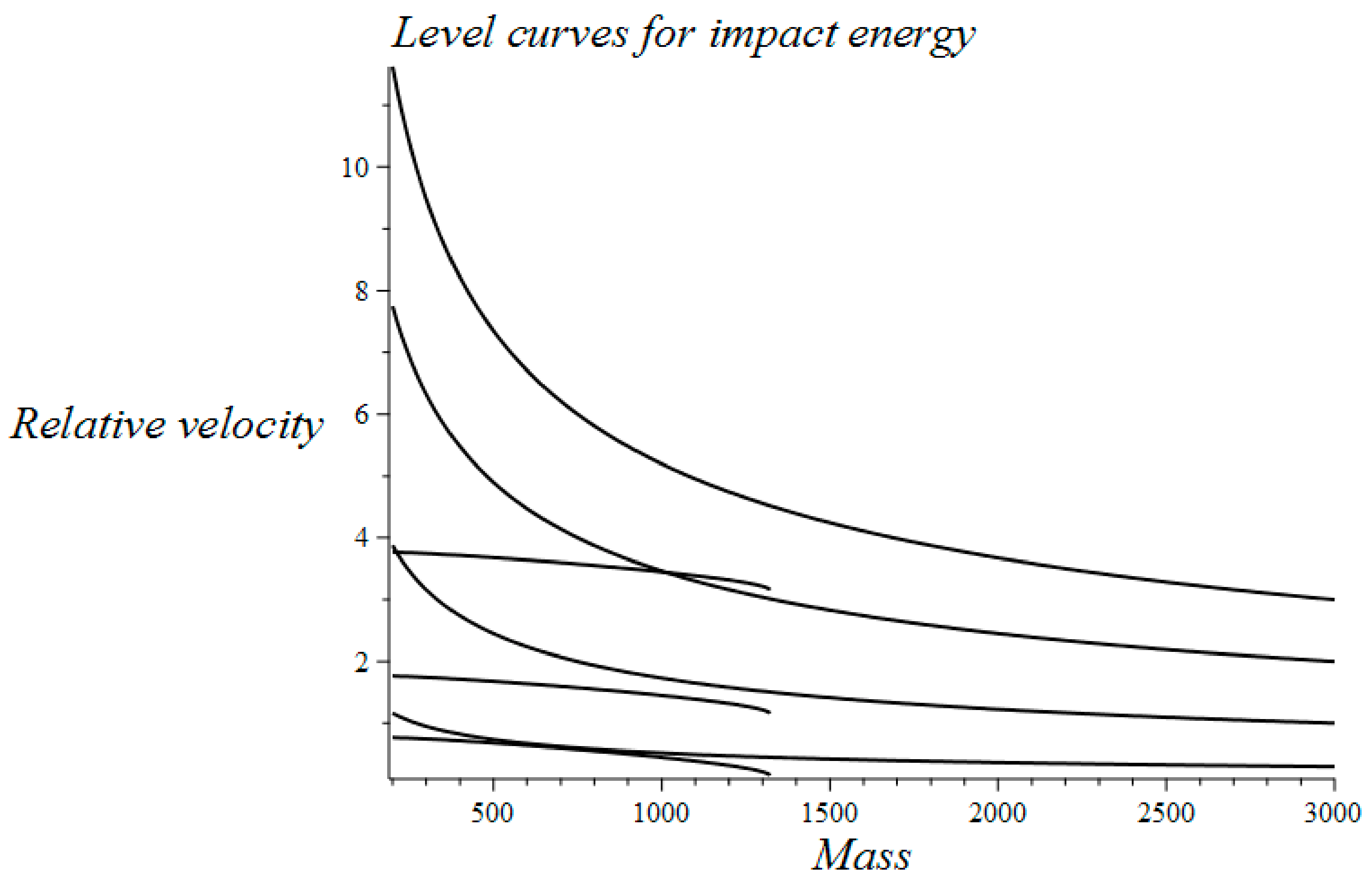
The relative uptake of energy by the ice feature versus the structure is shown in the lower part of the figure—for the ULS design the impact energy is mainly absorbed by the ice feature, while for the ALS design the structure typically absorbs most of the total kinetic energy. This total kinetic energy for the ship–ice system just prior to the impact event can be expressed as follows [
10,
16]:
where
ms and
as are the dry mass and the added mass of the ship (e.g., [
17]), respectively; m
i and a
i denote the corresponding quantities for the ice feature;
vs is the corresponding speed of the ship, and
vi that of the ice feature.
The energy balance (by disregard remaining energy in the system after impact, e.g., due to the ship or the ice feature having nonzero velocities) is then expressed as the kinetic energy before the impact being equal to the sum of the energy absorbed by the structure and that absorbed by the ice feature:
where the first term represents the energy absorbed by the ice feature and the second term corresponds to the energy that is absorbed by the structure.
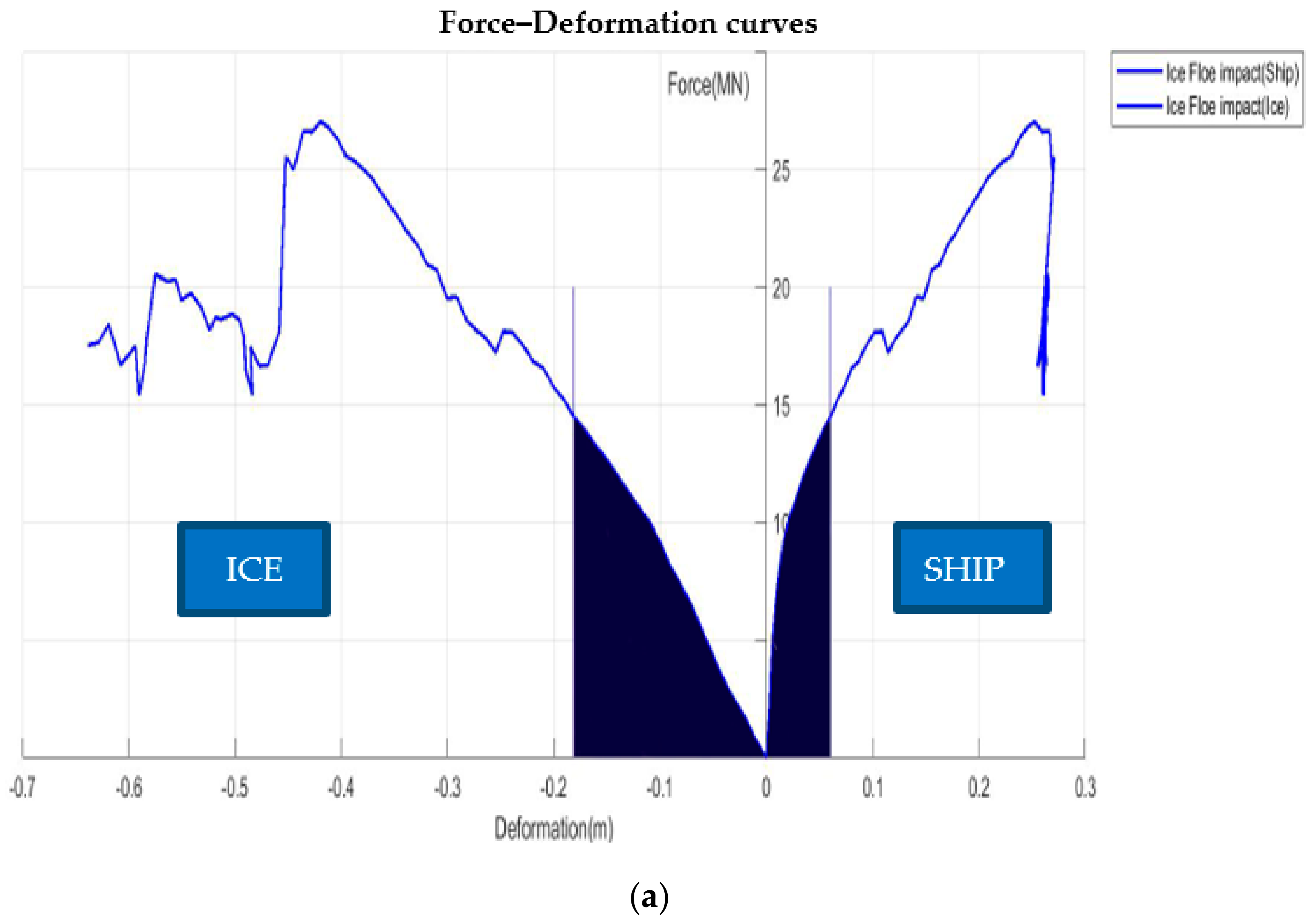
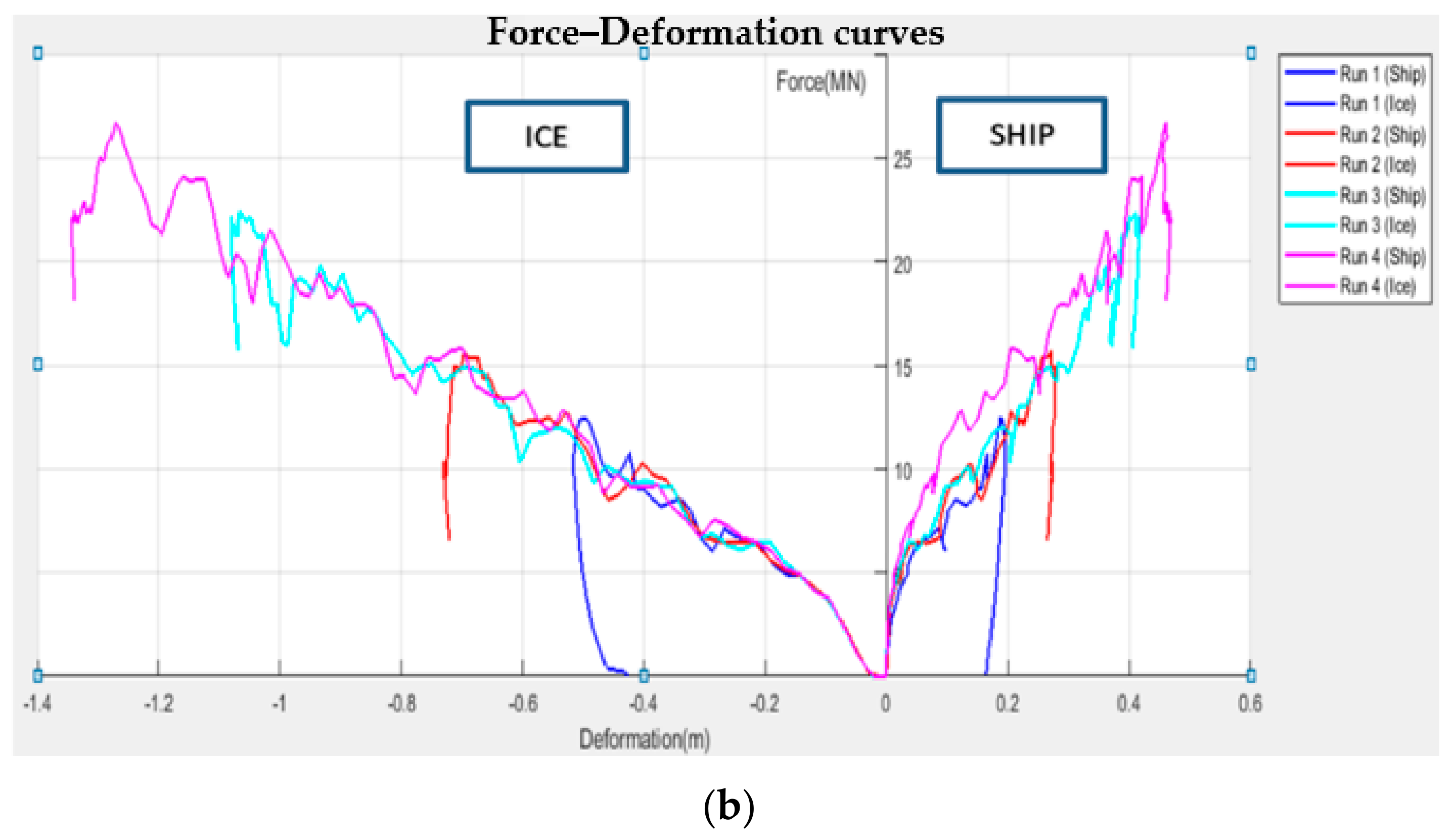
The absorbed energies correspond to the areas under the respective force–displacement curves. The energy uptake by the structure versus the ice feature is further illustrated in
Figure 2 [
18] where the results correspond to a shared energy scenario. In
Figure 2a, the amount of energy absorbed in the case of an ice floe impact is shown with the ice contribution to the left and the structural contribution to the right (shaded areas). In
Figure 2b, load–displacement curves corresponding to increasing mass of the ice feature are shown where the blue curve corresponds to the smallest mass (288 tons) and the violet curve corresponds to the largest mass (1500 tons). It is seen that the maximum deformation increases for both the structure and for the ice feature as the impacting mass increases. This implies a corresponding increase of the sum of the absorbed energies that are required in order to balance the initial kinetic energy. In addition to initial kinetic energy, it is found that the local shape of the ice feature for the part where the impact occurs also has a strong influence on the resulting contact force and relative amount of energy absorption.
3. Environmental Contour Method
The main idea behind design contours is to identify the most relevant environmental conditions corresponding to a specific return period (or equivalently specified in terms of a probability of exceedance). Subsequently, response analyses are performed for a subset of these conditions. This saves computation time as compared to a more systematic and more accurate long-term response analysis for which the whole range of possible environmental conditions must be considered.
In order to perform such a full long-term analysis, the following two-step procedure is relevant:
I. The ULS or ALS criterion is first expressed on the following form:
Here,
G(∙) designates the mechanical failure function; the
n-dimensional vector
S = (
S1,
S2, …,
Sn)
T denotes the basic design variables for which the joint probability density function (PDF) is assumed to be known, which is denoted by
fS(
s).
Y(
S) is the internal load effect in the structure. The quantity
yc is the corresponding design capacity (which can be a function of several deterministic parameters and/or additional random variables related to the structural properties). Typically, the load effect and structural capacity is formulated in terms of stresses, forces, and bending moments.
As an example in relation to the ULS, yc may, e.g., correspond to the design value of the yield stress of the steel for the ship hull and Y(S) will then represent the maximum stress load effect in the hull (as a function of the values of the basic design variables). However, since this corresponds to a very strict design criterion, it is more relevant instead to take yc to designate a maximum permissible plastic strain limit (which for a particular hull member can be translated into a maximum plastic deformation limit). The quantity Y(S) then designates the maximum strain load effect in the hull. Similarly for the ALS, yc may refer to a critical plastic strain limit which generally is higher than for the ULS. Depending on the accidental scenario, it could even correspond to the fracture strain of the hull material or a certain maximum allowable fracture damage.
However, in the following, a formulation is also provided where both the load effect and capacity are defined in terms of energy levels, i.e., by applying the absorbed impact energy as the load effect and the critical impact energy (corresponding to a given failure mode) as the capacity. This is in accordance with the impact analysis approach outlined in the previous section.
II. The failure probability
pf of the structure corresponding to a given time in operation can next be calculated as:
Basically, this integral expresses the probability content that corresponds to the “volume” of the failure domain in the space which is spanned by the relevant random variables. The boundary of the failure domain is defined as the surface that is obtained by setting the mechanical limit state function in Equation (3) equal to zero.
The integral in Equation (4) can be only be expressed in closed form for cases where the joint PDF and the limit state function G(yc, S) are given. However, this is quite rare in practice since the load effect Y(S) for a given value of the environmental parameter vector S usually needs to be obtained by means of numerical simulation and/or by experiments.
Evaluated of the integral can also be made by application of the Monte Carlo simulation technique (MCS) or by other reliability methods such as the first order or second order reliability methods (FORM/SORM) [
19]. These approaches are based on the joint PDF and the failure surface
G(
yc,
S), which are combined in order to establish a transformation into a normalized space of independent, standard Gaussian variables (which is frequently referred to as the U-space). In the FORM approach, the failure surface in normalized space is represented by the tangent plane at the so-called design point. The corresponding probability of failure is approximated as:
where Φ represents the standard normal cumulative distribution function (CDF);
β denotes the reliability index, and this also corresponds to the distance between the design point to the origin in normalized space.
It is emphasized that the relationship between the failure probability and the standard cumulative Gaussian distribution function is due to the transformation into normalized and independent variables. Furthermore, this is a first order approximation based on linearization of the mechanical limit state function. Second order corrections to this approximation can be obtained, e.g., by the so-called SORM approximation. Generally, various types of Monte Carlo simulation techniques are also applied as a supplement to (or sometimes instead of) the approximation in Equation (5).
However, determination of the design load effect, yN, which corresponds to the capacity that is required in order to withstand the loads associated with an N-year return period generally requires iterative reliability calculations for different values of yc.
Accordingly, it is highly relevant to simplify Step II of the long-term analysis procedure, which is precisely the objective of environmental contour methods. The design contour for the
N-year return period is frequently established by means of the inverse FORM (i.e., IFORM) approach [
13,
20]. The probability of failure,
pf(
yN) is then first specified in order to generate the environmental contour that corresponds to that probability. An
n-dimensional sphere with the radius
βF, which is obtained by means of the specified failure probability as expressed by Equation (6), is then first created in the normalized Gaussian space:
This sphere is subsequently transformed into the physical parameter space to yield the design contour. The mapping can, e.g., be based on the inverse Rosenblatt transformation for cases where the joint density function of the variables is formulated by means of the conditional modelling approach [
21] or by the Nataf transformation if the marginal PDFs of variables and the correlation coefficients between these variables are given [
12]. The environmental contour obtained by the IFORM is accordingly the collection of physical environmental parameters that correspond to the normalized values, which are located on the sphere with radius
βF in the U space.
It is found that the main benefit of the design contour method is due to the description of the environmental parameters being uncoupled from computation of the structural response. Due to its high efficiency and satisfactory accuracy, the environmental contour method has, e.g., been widely applied for assessment of ULS criteria, and in particular during preliminary design phases. The most critical response corresponding to the environmental conditions defined by the environmental contour can then be applied for estimation of the extreme response for the specified return period. If the response process for a given ice condition is stochastic, the extreme response can be taken to be an upper fractile of the corresponding short-term extreme response distribution. This is similar to the approach applied in the case of wave-induced response [
11].
5. Environmental Design Contours for Ice Ridges
The key ice ridge parameters and the associated probabilistic models pertaining to these parameters are described above. Based on these probabilistic models and the IFORM approach, various categories of environmental contours can be developed. This comprises two-dimensional contour lines, three-dimensional contour surfaces, and four-dimensional manifolds. These can subsequently be employed within the context of deterministic or reliability-based design of ships in Polar waters. Different types of such environmental contours are discussed in this section.
5.1. Two-Dimensional Contours
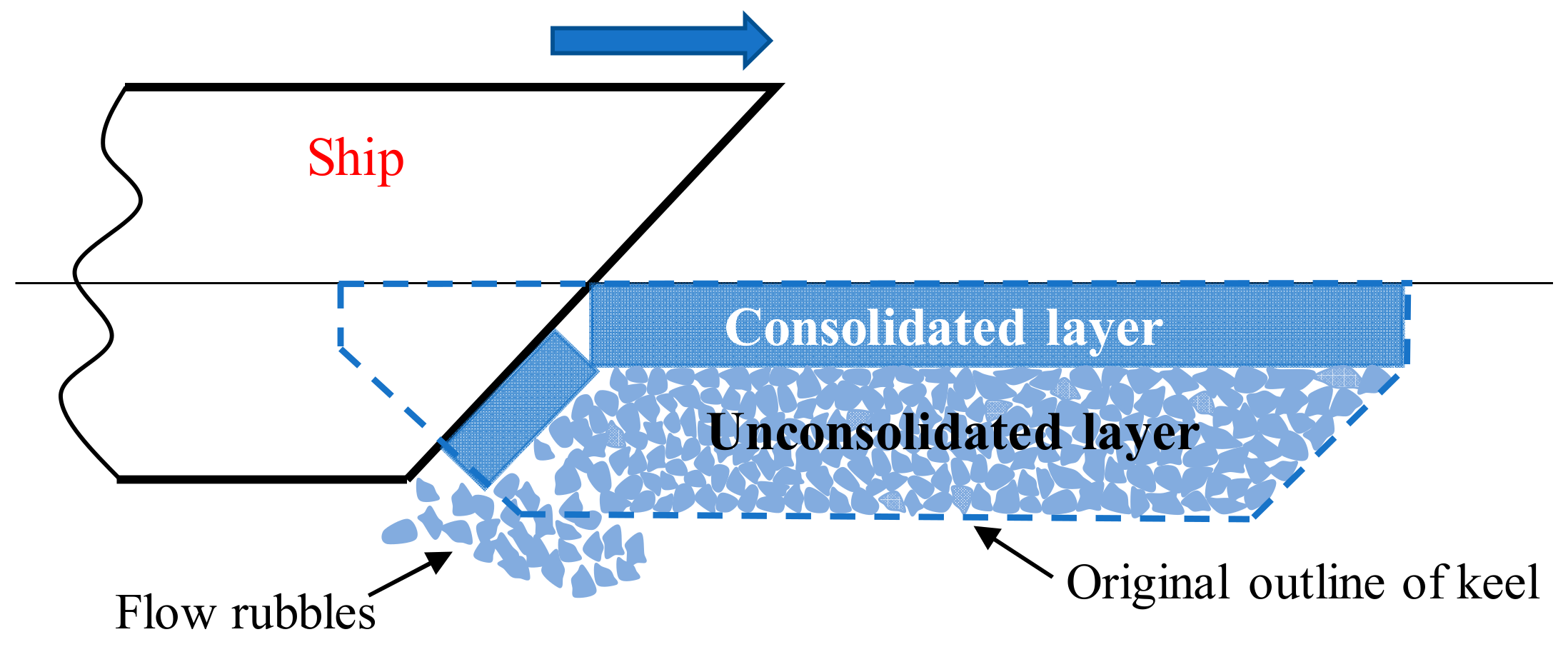
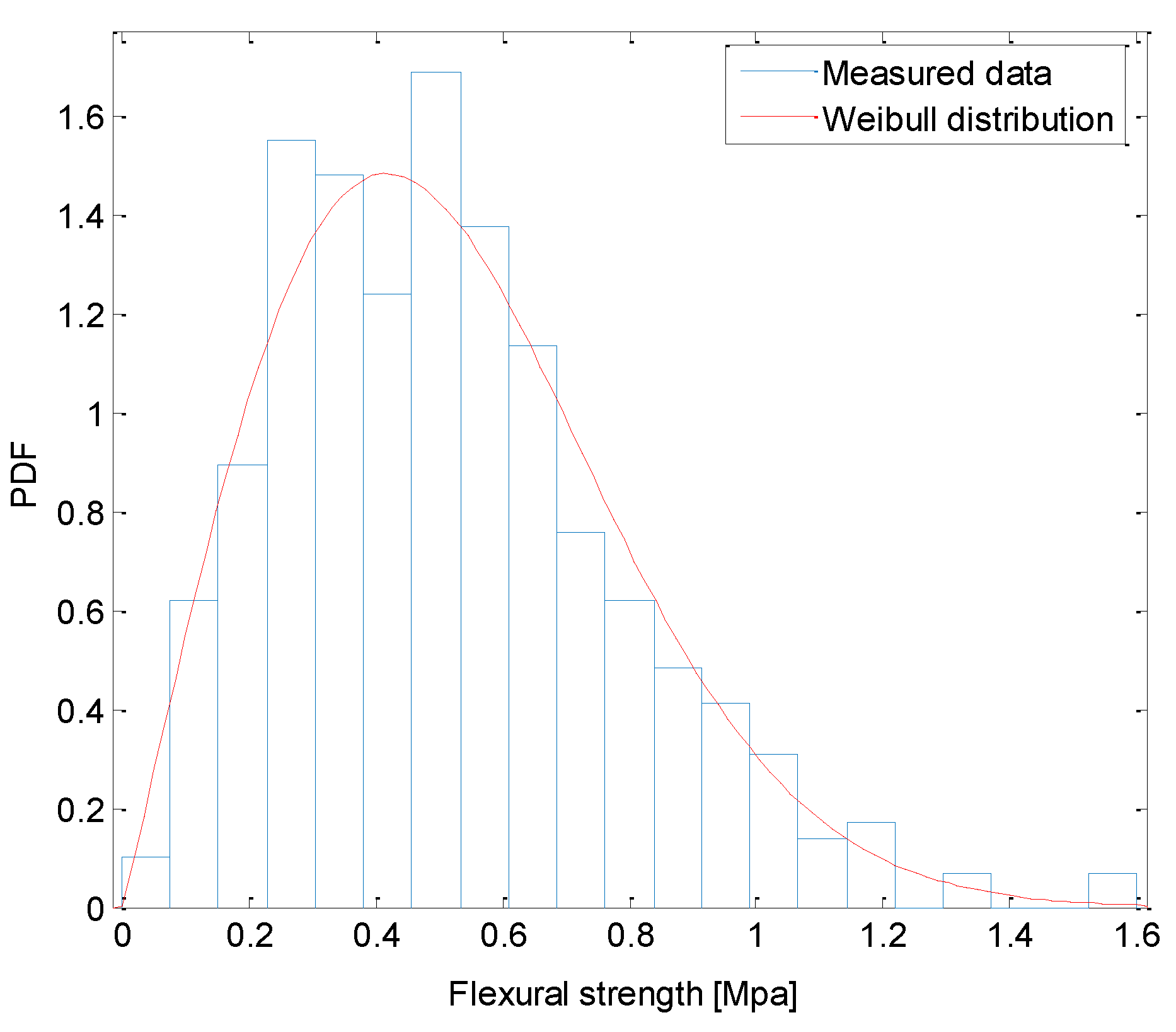
Among the three forms of environmental contours mentioned above, the environmental contour lines based on only two environmental parameters represent the simplest form. The ship–ridge interaction process can then be represented in a simplified manner as a sloping structure exposed to an incoming ice sheet. Ship-ice loads can accordingly be estimated by applying the empirical formula given in [
3], which is used to calculate the static ice loads. This formula only requires the flexural strength and the consolidated layer thickness of the ice feature as input quantities. This simple model is clearly not completely satisfactory for representation of the ship–ice ridge interaction process, since both dynamic effects as well as ridge keel actions are not taken into account.
Still, such a model can be applied as a basis for illustration of the main steps associated with application of the design contours for estimation of the extreme ice ridge loads. Moreover, the effect of increasing correlation between the basic design parameters and an increasing number of encountered ice ridges corresponding to a given return period in relation to the resulting environmental contours can readily be investigated, which is due to the simplicity of the two-dimensional design contours.
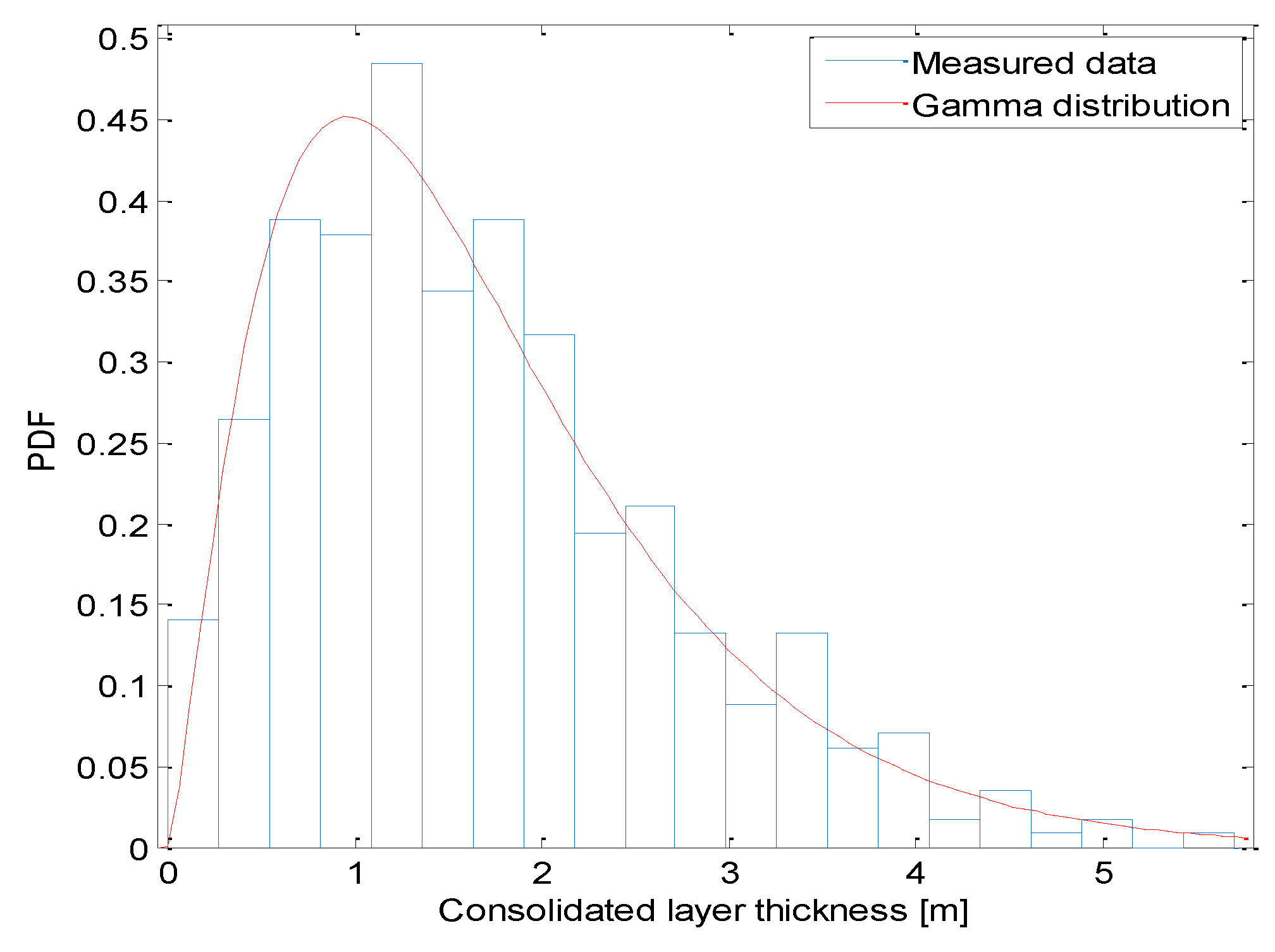
The specific location that is considered determines the probability distribution of the consolidated layer thickness. Presently, only experimental data that are collected for
hcl in the Barents Sea are available. Accordingly, it is assumed that the relevant Arctic ship mainly operates in the Barents Sea, and, furthermore, that it travels a distance of 5000 km per year in areas with ice ridges. The density of ice ridges is taken to be 2/km along the route [
47]. The intended lifetime is assumed to be 50 years. Presently, ice conditions along the route are assumed to be constant during this period.
The annual number of ice ridges encountered by the ship is assumed to be a fixed value, which is given as
N1year =
r∙5000 km∙2/km, where
r is the encounter frequency that depends on the capability of the navigation equipment on board and the experience of the crew. The number of ridges experienced by the ship hull during the service life,
N50years, is then obtained:
The radius of the circle in the normalized space,
βF, which corresponds to this return period is determined by:
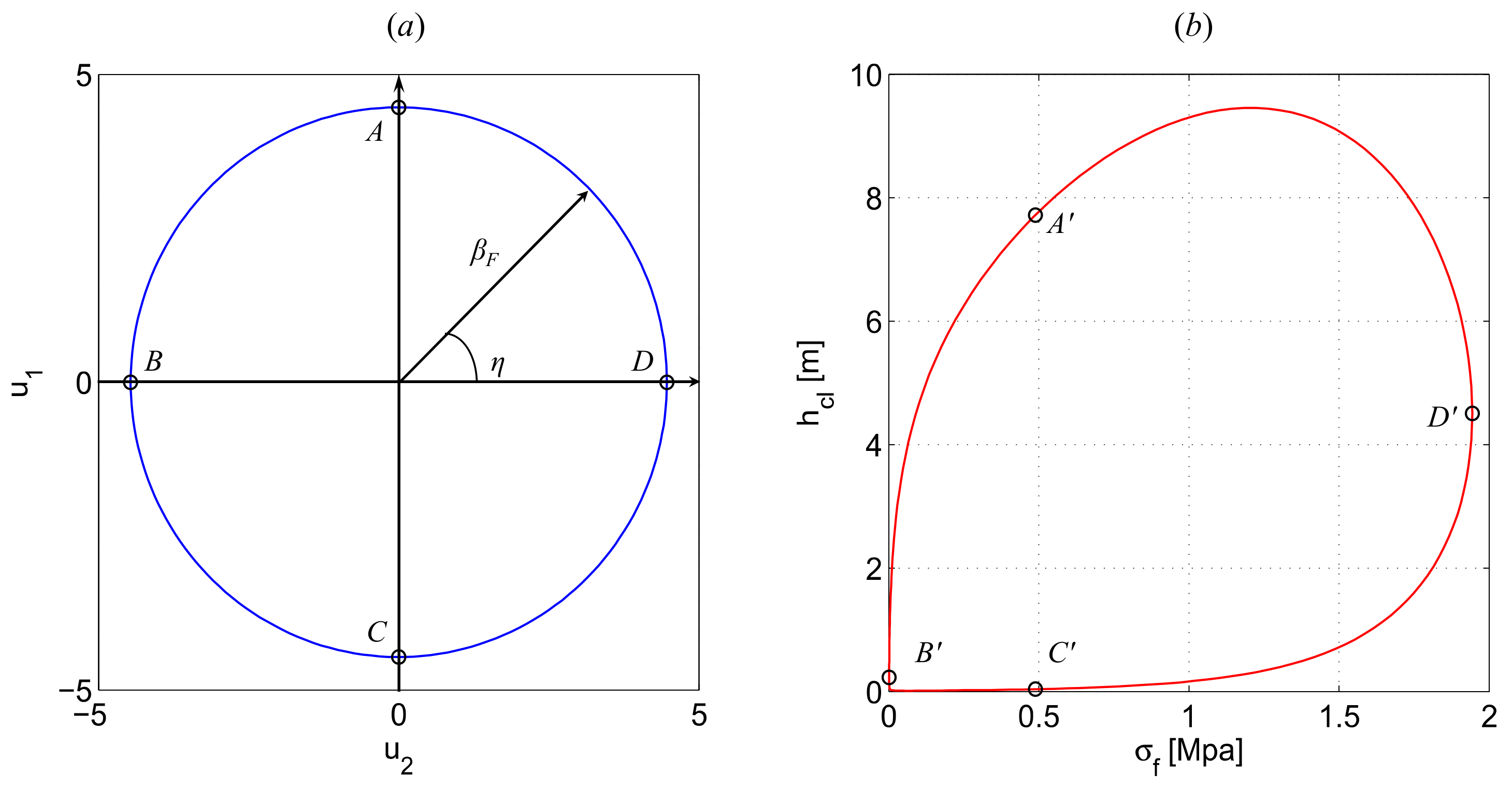
A circle corresponding to r = 0.5 (which gives
N50years = 250,000) is plotted in
Figure 8a, where
u1 and
u2 are independent normalized Gaussian variables given by
u1 =
βF∙sin(
η) and
u2 =
βF∙cos(
η), where the angle
η ranges between 0 and 2π.
Presently, only the marginal PDFs of the key parameters are available, while the correlation coefficients between the two parameters are not known. The variables
s1 and
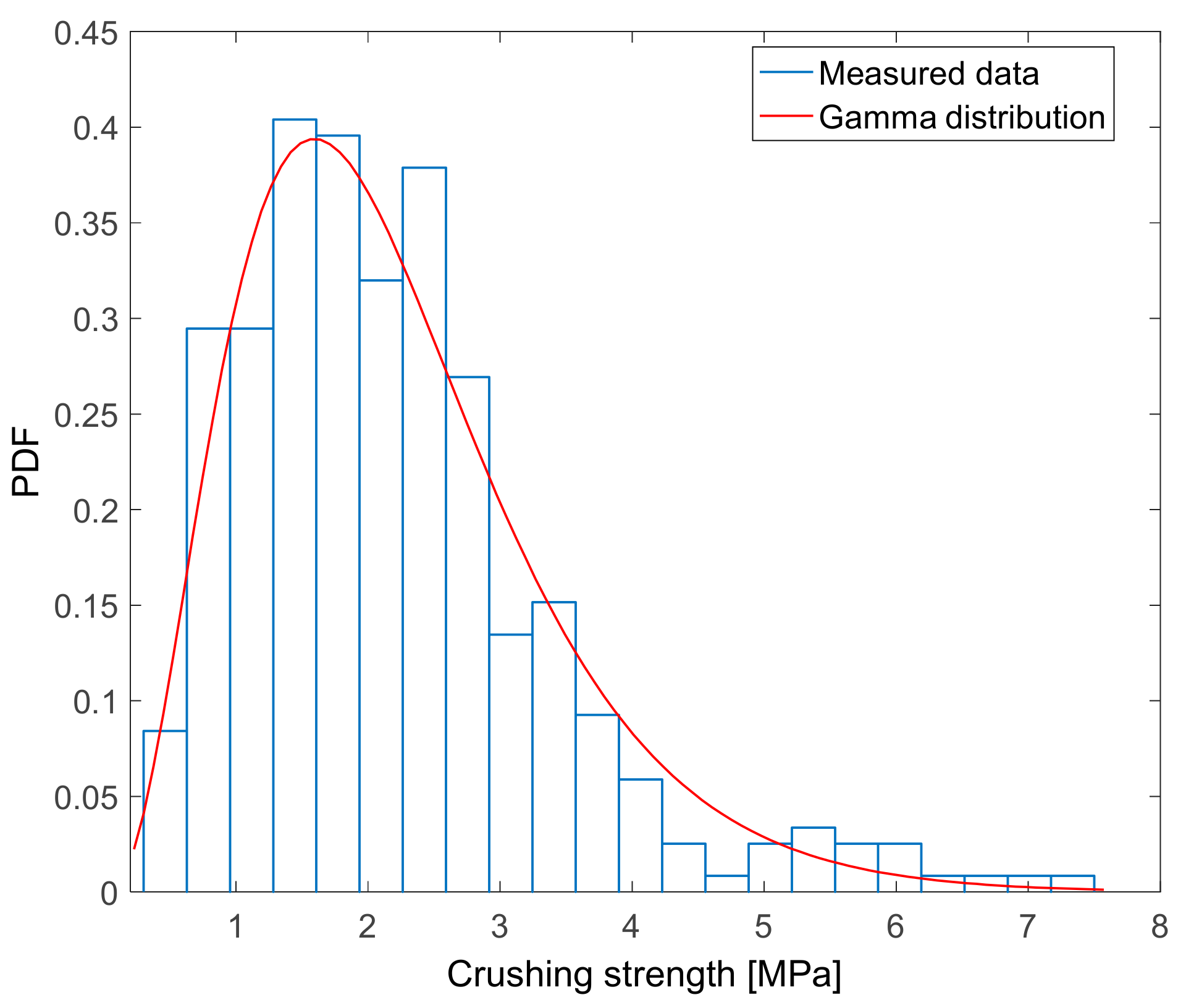
s2 are introduced, which correspond to the consolidated layer thickness and the ice crushing strength, respectively. The resulting design contour in physical parameter space is then established based on the circle in normalized space by application of the Nataf transformation, which is expressed as follows:
Here,
ρ12 denotes the correlation coefficient between the crushing strength and the thickness of the consolidated layer. This coefficient is related to
ρ′
12, which denotes the associated (equivalent) coefficient of correlation that is applied by the Nataf transformation. The two correlation coefficients are connected by a semiempirical equation of the following type. The structural response corresponds to
where relevant expressions for the function
ζ can be found in [
48].
The contour line for a 50-year return period is presented in
Figure 8b for the case that the correlation coefficient
ρ12 is 0.5. In order to illustrate the result of the transformation into physical space, four points that are located on the circle in normalized space are selected. These are denoted by
A,
B,
C, and
D in the figure. The four points are then mapped into the corresponding points in the physical parameter space. These are designated by
A′,
B′,
C′, and
D′. Having generated the contour line corresponding to a 50-year return period, the associated extreme load level,
yN, can be estimated based on the following principle:
Accordingly, the extreme response/loads can be simplified by searching along the contour for the most critical environmental condition. The values of correlation coefficient
ρ12 and the encounter frequency
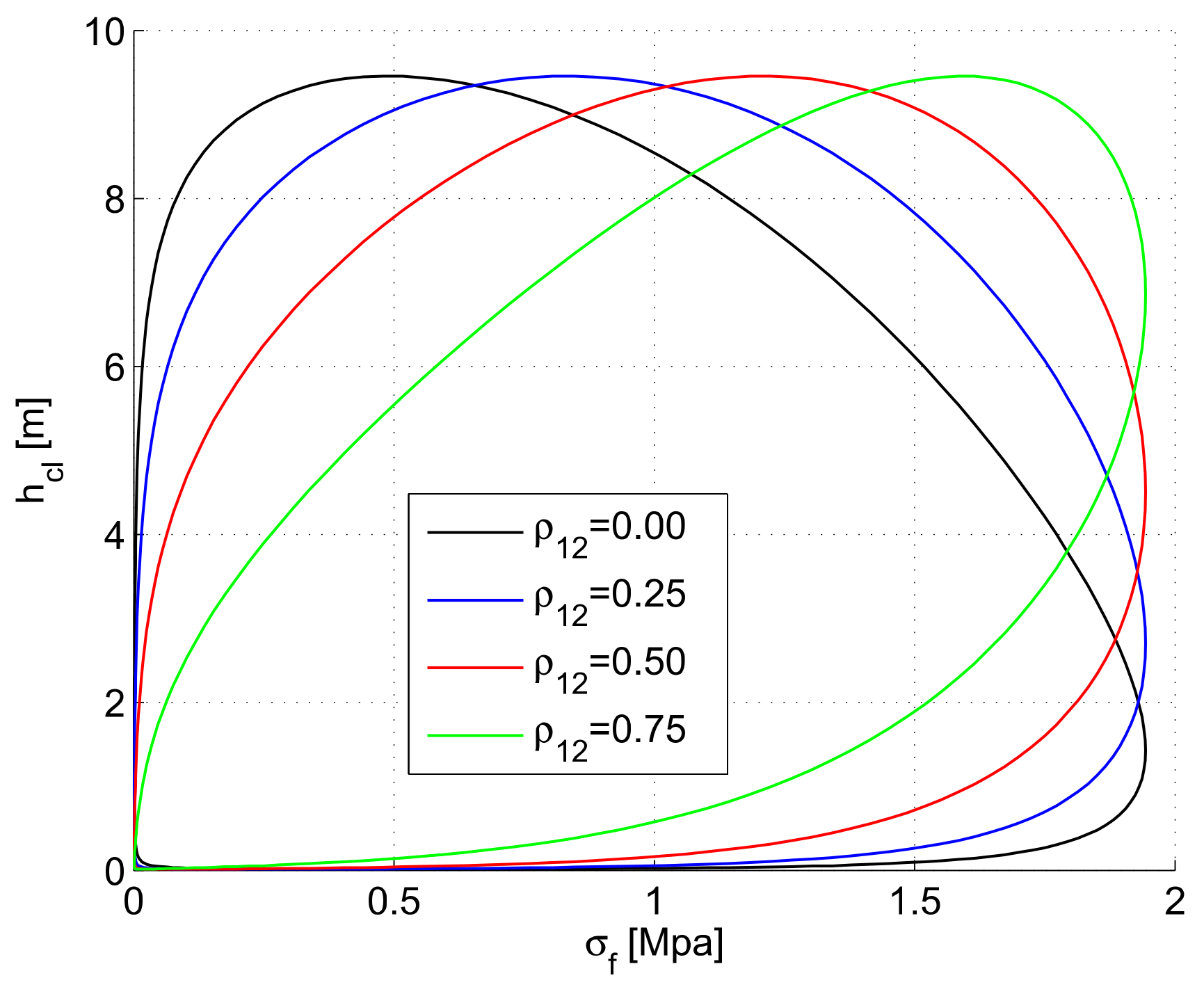
r are selected somewhat arbitrarily due to the limitation of reference data. The influence of these two variables on the subsequent contour lines can be studied. For a given value of
r, the effect of increasing the correlation coefficient
ρ12 on the environmental contour is first shown in
Figure 9.
From this figure, it is seen that the shapes of the environmental contour lines are strongly influenced by the value of the correlation coefficient. There are no changes of the maximum values for the flexural strength and the consolidated layer thickness along the different contour lines for varying values of ρ12. However, the critical region where the simultaneous values of the consolidated layer thickness and the flexural strength are high is seen to become increasingly narrow for increasing values of the correlation coefficient. This narrowing implies that high values of consolidated layer thickness have a stronger tendency to be associated with high values of flexural strength, and this generally implies more serious ice loads. Increasing values of the correlation coefficient will accordingly generally imply an increase of the maximum loads caused by the ice conditions along the contour line (which also implies an increase of the extreme hull response associated with a given return period).
The influence of encounter frequency r on the environmental contour is next studied for the case that the correlation coefficient has a specific value of 0.50. The contour lines corresponding to varying r values then have similar shapes since they are based on the same coefficient of correlation. Increased value of r implies that a higher number of load events are experienced by the ship hull for the same return period. The corresponding contour lines then expand accordingly. The maximum value along the thickness axis changes from 9 m to almost 10 m when r changes from 0.2 to 0.75. For the flexural strength, the maxim value changes from 1.8 MPa to almost 2 MPa. Clearly, this gives increasingly higher ridge loads as the encounter frequency increases.
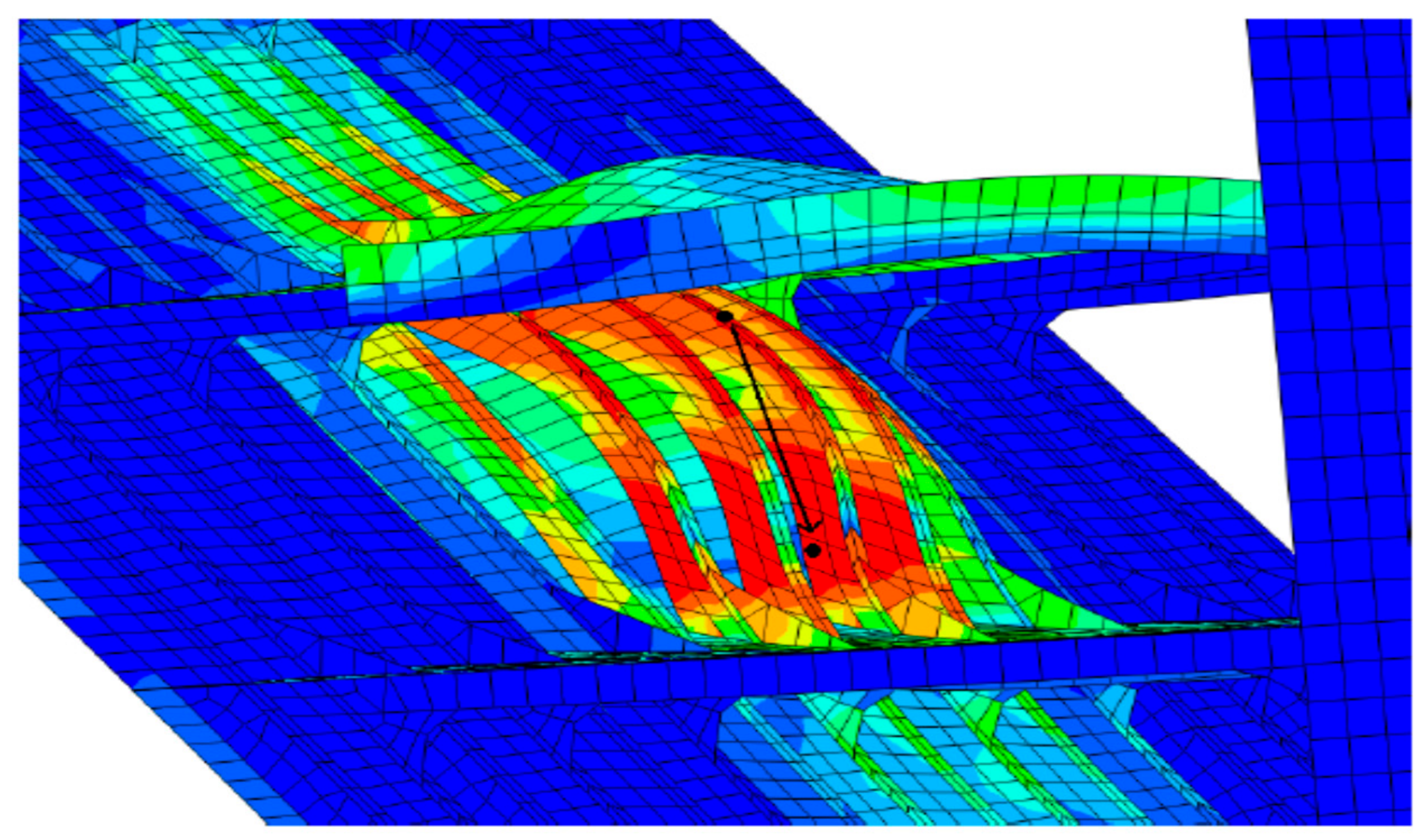
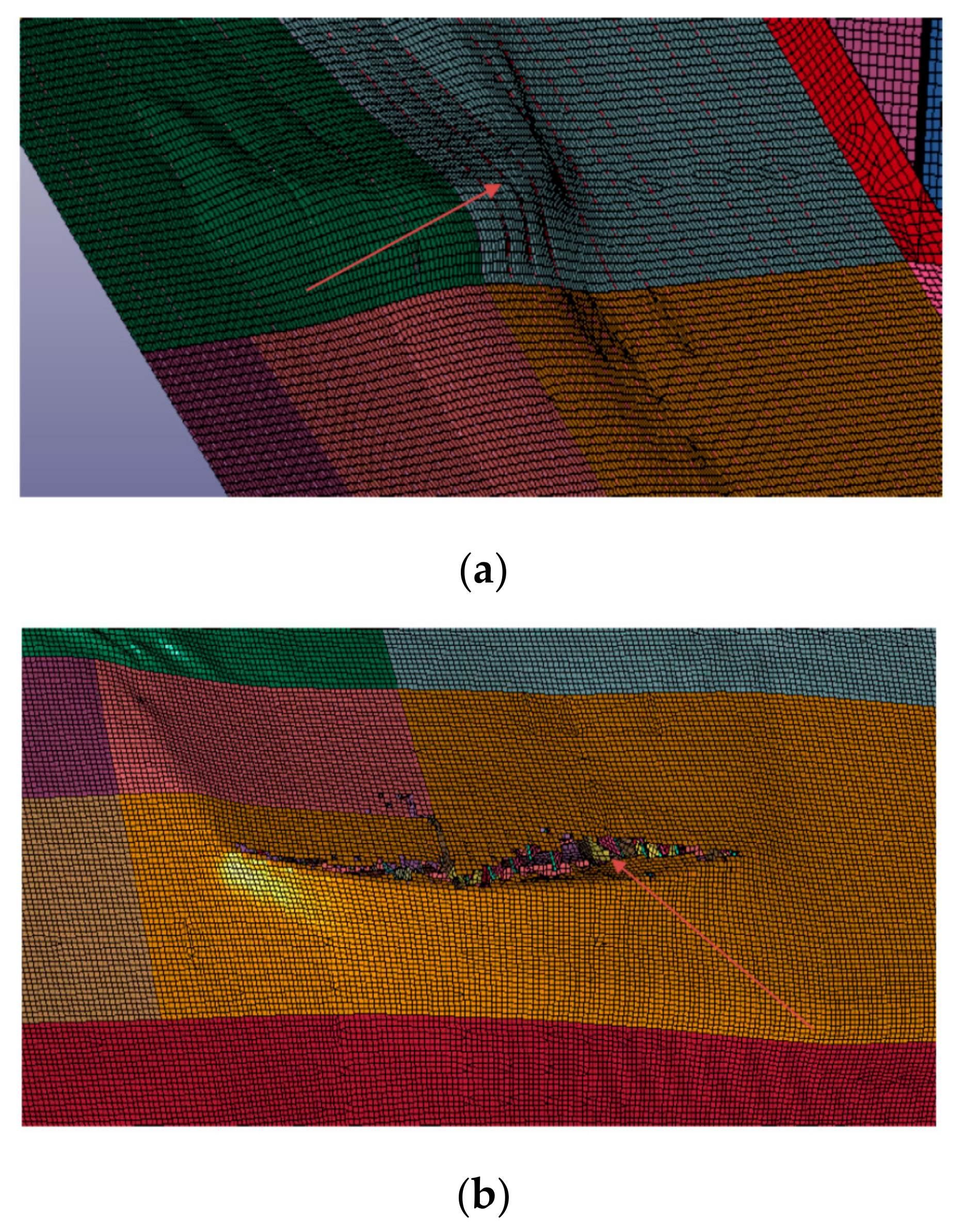
For stationary structures (e.g., floating production systems, FPSOs), the ridge encounter frequencies depend upon the arrival rate at the site where the structure is located. Accordingly, it cannot be influenced or controlled unless, e.g., disconnect systems or protective barriers are applied. An intermediate situation becomes relevant for floating units that are intended for temporary but extended operations, such as exploration, drilling, and installation vessels. An example of computed deformations and stresses caused by the impact of an ice ridge on the upward sloping hull of a mobile drilling unit (MODU) is shown in
Figure 10 [
49]. The structural response corresponds to permanent plastic deformations without any fracture taking place, and accordingly this would correspond to a mechanical limit state of the ULS/ALS category.
5.2. Three-Dimensional Contour Surfaces
In order to obtain more general types of ice-loads than those restricted to the two-parameter model proposed in
Section 5.1, models with three parameters for characterization of the ice ridge properties can also readily be accommodated within the present approach. Two specific examples of three-parameter combinations are (i) layer thickness/crushing strength/flexural strength and (ii) layer thickness/keel draft/flexural strength. Both of these cases are considered in [
39]. Here, only the first alternative is addressed.
For this model, possible load contributions caused by the unconsolidated rubble are excluded. The main ice loads caused by the ship and ridge interaction are now assumed to be dominated by the consolidated layer part [
14]. However, dynamic effects associated with the ship–ice interaction process can be included as part of numerical simulations or relevant empirical or theoretical load formulations. Accordingly, the consolidated layer thickness, the flexural strength, and the crushing strength are included as the relevant parameters. As compared to the contour based on two variables, the third component
s3 represents the ice ridge crushing strength. The corresponding variable
u3 in the normalized U space is also now expressed by means of the Nataf model based on introduction of two additional equivalent correlation coefficients (i.e.,
ρ′
13 and
ρ′
23):
where the quantities
ρ′
ij (
i,
j = 1, 2, 3;
i ≠
j) designate equivalent correlation coefficients that are applied by the Nataf transformation.
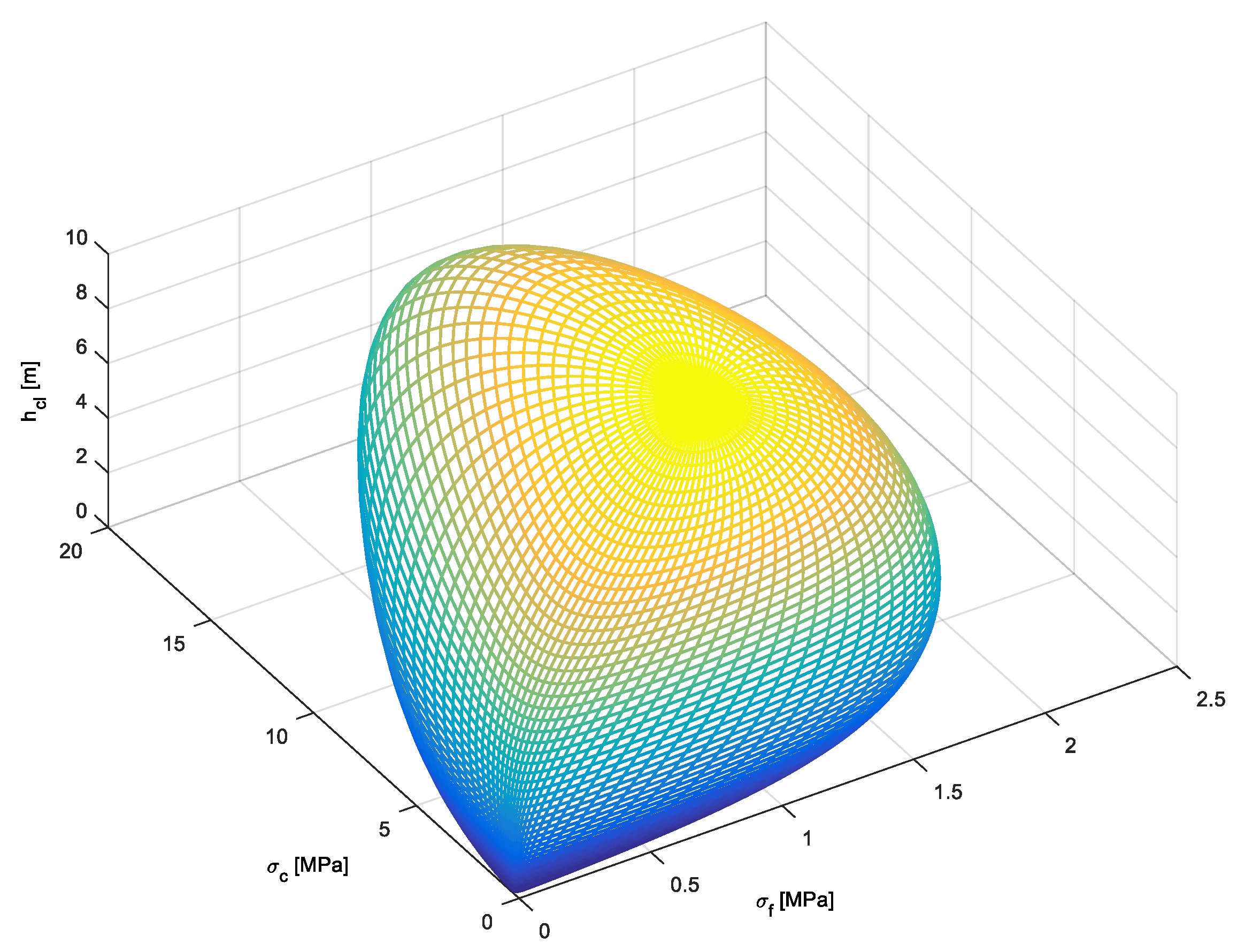
As an example, a case is considered for which all the three correlation coefficients in the joint statistical mode are equal to 0.5. The encounter frequency
r is assumed to be 0.5 and the parameters of the statistical models are set to be the same as those described above. As an extension of the two-dimensional contours, a sphere with radius
βF in three dimensions is next established in the normalized space. A three-dimensional design contour in the physical parameter space is subsequently obtained by means of a transformation based on the Nataf model according to Equation (17). The resulting contour surface with three key parameters, i.e., the consolidated layer thickness, the flexural strength, and the crushing strength (corresponding to a return period of 50 years) is plotted in
Figure 11 [
39].
To provide a detailed visualization of the contour surface, a suite of contour lines in two dimensions, which are established by locking the value of one of the parameters (e.g., the consolidated layer thickness), could have also been constructed.
Having established the contour surface that corresponds to the three basic parameters selected, a set of ice ridge conditions that correspond to specific joint values of these parameters can be selected. These conditions correspond to specific points located on the contour surface. For each of these points, a “response analysis” is performed, e.g., by means of numerical calculations, empirical expressions, analytical solutions, and/or experimental tests. The most critical ice ridge condition is then subsequently identified. This yields an estimate of the highest ice ridge load and allows calculation of the associated extreme 50-year hull response.
5.3. Environmental Contour for the Case with Four Parameters
Although the model just discussed with three basic ice ridge parameters is more comprehensive than the model with only two parameters, it may still not be adequate for some design purposes. As an example, the possible contribution to the ice loading caused by the unconsolidated rubble blocks is not considered. Accordingly, an even more refined four-parameter model, which also includes the keel draft as an additional random variable, can be relevant. Based on such a statistical representation, both the dynamic effects associated with the interaction between the consolidated layer and the ship hull, and the load effects due to the rubble blocks can be taken into account.
It is relevant to assume that there is no correlation between the keel draft and the other three key parameters. The other coefficients of correlation
ρij (with
i,
j = 1, 2, 3; and
i ≠
j) are hence set equal to 0.5 for the purpose of illustrating the resulting contour. The other parameters, such as
r and
N50years, are kept the same as for the example calculations above. For the purpose of visualizing the four-parameter contour (for a return period of 50 years), a set of environmental contour surfaces which correspond to specific values of the keel draft are displayed in
Figure 12.
For a specific keel draft, the equivalent value of
u4 in normalized space is obtained by applying the transformation given by Equation (17). Then, a sphere of radius
βF (given in Equation (13)) is established in the normalized space of three standard Gaussian variables
u1,
u2, and
u3. This three-dimensional sphere is subsequently transformed into the space of physical parameters that results in the contour surfaces shown in
Figure 12. The surfaces that correspond to different values of
hk are of a similar shape due to identical correlation relationships with respect to the four basic parameters. It is also seen that for keel drafts above the mean value (
hk = 8.89 m), the volume that is bounded by the contour surface decreases for increasing values of the draft. Having established such a set of contour surfaces associated with the return period of 50 years, the next task is for the designer to find the ice ridge conditions that are located on the surface (for a given draft), which cause the highest response levels in the ship hull. This requires consideration of a range of keel drafts, which adds some effort for identifying the most critical ridge characteristics, as compared to the case with only three parameters.
7. Conclusions
In this work, based on the interaction processes between ships and ice ridges/icebergs, relevant parameters associated with these ice features for determining the loading on a ship hull are addressed. Probabilistic models are applied in order to describe the available data for key design parameters. The potential for application of environmental contours for analysis and design of ships in Polar regions is illustrated. By application of the inverse FORM method (IFORM), different categories of design contours are generated by reflecting the number of parameters associated with the process of ship–ice interaction.
The effect of increasing the correlation between the environmental parameters and the influence from the encounter frequency r on the resulting environmental contour are both studied. It is important that more research should be directed toward collecting data related to the degree of correlation among the physical/mechanical parameters of first-year sea ice since this has a strong effect on the design contour and on the extreme ice loads to which the ship hull is subjected.
The total number of ridge load events experienced by a Polar ship corresponding to a given return period is important for the resulting design load. The number of such events depends, e.g., on the frequency of encounter r, the annual travel distance, and the impact probability along the sailing route. In addition, global climate change also has some potential influence on the statistical characterization of the relevant parameters for the ice features considered. Such effects could be captured by a modified formulation of the proposed environmental contour method.
The data which form the basis for construction of the statistical models typically depend on area. Additional data for characterization of the level ice and the consolidated layer of ice ridges in other Polar areas are continuously being collected. Environmental contours for characterization of input parameters that are relevant for load and response calculations can accordingly be established also for these areas.
Furthermore, there is clearly a need for more explicit statistical information in relation to many of the other parameters that define relevant impact scenarios. As increasingly more empirical data become available, more accurate and refined design methods can be achieved.
This should also be seen in the light of recent design codes that move toward a more goal-based approach rather than the prescriptive rules of today [
56,
57,
58]. This results in less specific details and less rigid design requirements. Design against accidental loads for ships in Polar regions must also take into account relevant ship operation criteria and corresponding transit restrictions for ships in Polar waters [
59,
60].




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


















