
Ensuring Agricultural Sustainability through Remote Sensing in the Era of Agriculture 5.0


1
Department of Plant Physiology, Institute of Biotechnology, University of Granada, 18071 Granada, Spain
2
Department of Electronics, University of Granada, 18071 Granada, Spain
3
Department of Engineering Construction and Project Management, University of Granada, 18071 Granada, Spain
*
Author to whom correspondence should be addressed.
Appl. Sci. 2021, 11(13), 5911; https://0-doi-org.brum.beds.ac.uk/10.3390/app11135911
Submission received: 15 April 2021
/
Revised: 7 June 2021
/
Accepted: 22 June 2021
/
Published: 25 June 2021
(This article belongs to the Special Issue The Status of the Sustainable Development Goals: Achievements and Expectations)
Abstract
:Timely and reliable information about crop management, production, and yield is considered of great utility by stakeholders (e.g., national and international authorities, farmers, commercial units, etc.) to ensure food safety and security. By 2050, according to Food and Agriculture Organization (FAO) estimates, around 70% more production of agricultural products will be needed to fulfil the demands of the world population. Likewise, to meet the Sustainable Development Goals (SDGs), especially the second goal of “zero hunger”, potential technologies like remote sensing (RS) need to be efficiently integrated into agriculture. The application of RS is indispensable today for a highly productive and sustainable agriculture. Therefore, the present study draws a general overview of RS technology with a special focus on the principal platforms of this technology, i.e., satellites and remotely piloted aircrafts (RPAs), and the sensors used, in relation to the 5th industrial revolution. Nevertheless, since 1957, RS technology has found applications, through the use of satellite imagery, in agriculture, which was later enriched by the incorporation of remotely piloted aircrafts (RPAs), which is further pushing the boundaries of proficiency through the upgrading of sensors capable of higher spectral, spatial, and temporal resolutions. More prominently, wireless sensor technologies (WST) have streamlined real time information acquisition and programming for respective measures. Improved algorithms and sensors can, not only add significant value to crop data acquisition, but can also devise simulations on yield, harvesting and irrigation periods, metrological data, etc., by making use of cloud computing. The RS technology generates huge sets of data that necessitate the incorporation of artificial intelligence (AI) and big data to extract useful products, thereby augmenting the adeptness and efficiency of agriculture to ensure its sustainability. These technologies have made the orientation of current research towards the estimation of plant physiological traits rather than the structural parameters possible. Futuristic approaches for benefiting from these cutting-edge technologies are discussed in this study. This study can be helpful for researchers, academics, and young students aspiring to play a role in the achievement of sustainable agriculture.
1. Introduction
Constant industrial innovation has made it possible that 2021 has been officially marked by the European Commission as the beginning of the era of “Industry 5.0” [1]. The industrial world, including the agricultural sector, is starting this year by getting a bit closer to digitalized and automated systems. Although, agriculture began in the Copper Age, after the Neolithic period, when man started cultivation by making use of wooden instruments and domesticating animals, this was then revolutionized through the use of metallic equipment for crop cultivation and this time was categorized as the first and second agricultural revolutions. The third and fourth industrial revolutions brought robotics, machines, telecommunication systems, genetic decoding, etc., to agriculture. The fifth and current revolution is based on artificial intelligence (AI) and cloud computing, applied to agricultural remote sensing (RS). A simple illustration of all the principal industrial revolutions, with respect to agriculture, is presented in Figure 1.
The increasing world population, climate change, and sustainable development goals require the agriculture sector to be efficient and sustainable: thereby ensuring food safety and security. According to the Food and Agriculture Organization (FAO), current agricultural production must increase by 70 % by 2050 considering the increasing demand for high quality and environmentally friendly food [2]. Similarly, on 25 September, 2015, the United Nations (UN) general assembly approved the agenda “Transforming our world: the 2030 Agenda for Sustainable Development”, which is an action plan for the prosperity of people and the planet [3]. Under this agenda, 17 Sustainable Development Goals (SDGs) were embodied, replacing the previously established Millennium Development Goals (MDGs), with a timeframe of completion from 2015 to 2030. Out of these 17 SDGs, the second SDG is “zero hunger”, i.e., eradicating the hunger, as it was estimated that, in 2015, around 690 million people were suffering from hunger [3,4]. This situation has worsened with the COVID-19 pandemic by affecting food transport systems and threatening people’s access to food due to the associated loss of income or increased food prices. In this context, FAO considers that agriculture can contribute to achieving the SDGs, particularly SDG-2, by providing healthy food that is directly related to better health and a productive life. The aims of SDG-2, to eliminate hunger and ensure access for all people, particularly the poor and in vulnerable situations, including infants, to healthy, nutritious, and sufficient food all year round (goal 2.1: SDG-2), are very ambitious. Nevertheless, agriculture has the potential to fulfil these objectives by enhancing the income of small-scale farmers (goal 2.2: SDG-2), strengthening the capacity to combat climate change, extreme weather events (e.g., droughts, fires, floods and other disasters), and progressively improving soil and land quality (goal 2.4: SDG-2). However, in order to do all of the above, a change is required in the way in which all stakeholders in the agri-food ecosystem approach the production process. The first and perhaps the most important step towards this goal is to change the way decisions are made at all levels of agricultural production, from the most primary level of the farmer who is called upon to make decisions every day on his cultivation to the agronomists and decision makers in large agri-food enterprises. Storage and analyses of large volumes of data (big data) for predictions (e.g., production or spread of diseases) but also for the possibility for agri-food companies to produce, from the data collected by digitization of production, information that is relevant to the value of their products and services. Therefore, a promising technology like RS can be an efficient tool to support agricultural sustainability. As an example, having RS as a novel tool to face adversities in agriculture, especially in developing countries, will produce positive effects in the global economy (maintaining the cost of agricultural products), will reduce the scale of economic emigration (often due to one or several years of low crop yield), and will help distribute richness more evenly across the planet [5,6].
In this 5th industrial revolution, RS has the potential of being one of the most important technologies for today’s agriculture. This is why RS, in the context of “agriculture 5.0”, is discussed in this article. RS sprouted in the 19th century (specifically in 1858) through the use of air balloons for aerial observations [7]. At present, it occupies a central position in precision agriculture (PA) and soil studies. It is also important to mention some of the interchangeable terms most commonly used include “precision farming”, “precision approach”, “remote sensing”, “digital farming”, “information intensive agriculture”, “smart agriculture”, “variable rate technology (VRT)”, “global navigation satellite system (GNSS) agriculture”, “farming by inch”, “site specific crop management”, “digital agriculture”, “agriculture 5.0”, etc.
RS is a vast term that covers various technological systems, such as satellites, RPAs, GNSS, geographic information systems (GIS), big data analysis, the Internet of Things (IoT), the Internet of Everything (IoE), cloud computing, wireless sensors technologies (WST), decision support systems (DSS), and autonomous robots. A remarkable breakthrough in RS technology occurred approximately fifty years ago with the advent, and later with launch, of Landsat-1 in 1972 [8]. Given the importance of such technologies, a rapid increase in investigations in the agricultural domain has been witnessed in terms of the number of publications. For example, in the last five years (2015–2019) the highest number of publications regarding the use of RPAs in agriculture belonged to Europe at 34%, followed by United States and China at 20% and 11%, respectively [6]. Primary work on RS has mainly been focused on the reflection mechanism, absorption, and diffusion of light rays from plant leaves, which differ based on the leaf thickness, structure, and pigment content of plant species [9]. Nevertheless, during the last decade, the scenario has changed and RS technology has been entirely revolutionized. Current studies are more related to designing novel algorithms, improving sensor technology, and the incorporation of artificial intelligence. In addition, agricultural RS is now experiencing a shift from structural parameter monitoring to functional trait monitoring, e.g., nitrogen contents, foliar and canopy functional traits, pigments, etc. For example, a profound characterization of spatiotemporal variability of chlorophyll a and b contents has been recently undertaken [10]. The “SmartAgro” project is a Romanian national project with the aim of developing a self-diagnosing and self-configuring telemetry system, enabling the use of IoT for areas with limited global system for mobile communication (GSM) signals [11], and is an example of improving the potential of RS by filling in research gaps. Similarly, various projects by the European Union (EU), such as “VIRTUOUS”, “NEWBIE”, “SWAMP”, etc., are also oriented to strengthen modern precision agriculture by utilizing state-of-the-art computational technologies [12,13,14]. In the same way, the creation of new AI-enabled software and applications is underway, which can verbally communicate with users and receive commands, e.g., AgroHub [15].
Quite a number of review articles, with respect to RS, are also available now—discussing or comparing particular aspects of these novel technologies. For example, a few of the reported studies, just in past three years (2018–2020), have discussed topics like plant biodiversity, monitoring of a particular crop, highlighting various applications, discussing substantial improvements to different platforms or technologies, use of particular technology, weed management, data management, underlining limitations, and hinting towards opportunities in this field [7,11,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40]. Such a huge number of publications emphasize the tenacious necessity of using RS technologies in agriculture. Similarly, this increasing number of studies also depicts the significant progress of RS technology in the agricultural sector.
The persistent need for food safety and security [9] is a driving factor for the incorporation of RS technologies into farms. Furthermore, the restriction of free movement and transport due to the current COVID-19 pandemic are impeding agricultural growth, which necessitates the implementation of RS technology for a better, economical, secure, efficient, and profitable industry. Therefore, the scope of this article is, not only to incite future research in this sphere, but also to highlight the importance of RS in ensuring food safety and security given the rapidly increasing world population. Similarly, the potential of RS to ensure sustainable agriculture is also described with its respective products. Correspondingly, research gaps are emphasized, based on the current status of these technologies, along with possible opportunities and the enabling technologies of this era.
This work has four sections. The first section highlights the prominent features of RS technology (i.e., RS technology products, data retrieving approaches, most commonly used vegetation indices, and spectral bands) and identifies current research efforts. The second section indicates the potential and applications of artificial intelligence to complement RS technology with respect to the 5th industrial revolution. In this regard, research gaps and challenges are also discussed. The third section deals with sensors used in RS; novel technologies and opportunities that this new technological era offers are also discussed. Similarly, the most common platforms of RS technology (i.e., satellites and RPAs) with practical examples in agriculture are presented in this section. Finally, the fourth section highpoints the research gaps and future potentials of RS technology, with examples, where possible, for guaranteeing agricultural sustainability and making the best use of the 5th industrial revolution.
2. Agricultural Remote Sensing
Agricultural remote sensing is a very useful technology that allows us to observe crops on a large scale in a synoptic, remote, and non-destructive manner. Usually, it involves a sensor mounted on a platform, which could be a satellite, RPA, unmanned ground vehicles (UGV), or a field robot. The sensor collects the reflected or emitted electromagnetic radiation from plants, which is then further processed to produce useful information and products. This information consists of traits of the agriculture system and their variations in space and time. Functional traits have been defined as the biochemical, morphological, phenological, physiological, and structural physiognomies that regulate organism (plant) performance or fitness [18]. These traits vary from one plant to another and from one location to other, and can be categorized as typological-, biological-, physical-, structural-, geometrical-, or chemical-based in terms of their respective natures. RS provides an effective relation between the radiance of plants and the respective traits to extract useful information, e.g., leaf area index (LAI), chlorophyll content, soil moisture content, etc. Nevertheless, a number of factors, like the crop phenological stage, crop type, soil type, location, wind speed, precipitation, humidity, solar radiation, nutrient supply, etc., need to be known to generate accurate information from RS products. Among others, plant density, organ computing, LAI, green cover fraction, leaf biochemical content, leaf orientation, height, soil and vegetation temperature, and soil moisture are prominent informational products that RS delivers. This information is further processed and used to interpret crop health, disease infraction, irrigation period, nutrient deficiency, and yield estimations.
Weiss et al. [18] categorized agricultural data retrieving approaches from RS into the following three principal categories:
- Purely empirical methods: establishing a direct relationship between a measured RS signal and biophysical variables (linear and nonlinear regressions: machine learning).
- Mechanistic methods: model inversion based on Maxwell’s equations (for radar interferometry and polarimetry), optical and projective geometry (for LiDAR and photogrammetry), and radiative transfer theory (for solar and microwave domains).
- Contextual methods: processing the spatial and temporal characteristics of captured images using segmentation techniques.
Another way to describe information treatment using RS technology is the preparation of vegetation indices (VIs). Most commonly, VIs calculated using RS, among others, include: normalized difference vegetation index (NDVI) for crop monitoring and empirical studies; soil-adjusted vegetation index (SAVI) for improving the sensitivity of NDVI to soil backgrounds; green normalized difference vegetation index (gNDVI) for estimating the photosynthetic activity; wide dynamic range vegetation index (WDRVI) for enhancing the dynamic range of NDVI; chlorophyll index–green (CI–G) for determining the leaf chlorophyll content; modified soil adjusted vegetation index (MSAVI) for reducing the influence of bare soil on SAVI; optimized soil-adjusted vegetation index (OSAVI) for calculating aboveground biomass, leaf nitrogen content, and chlorophyll content; chlorophyll vegetation index (CVI) for representing relative abundance of vegetation and soil; triangular vegetation index (TVI) for predicting leaf nitrogen status; normalized green red difference index (NGRDI) for estimating nutrient status; visible atmospherically resistant index (VARI) for mitigating the illuminating differences and atmospheric effects in the visible spectrum; crop water stress index (CWSI) for measuring canopy temperature changes and dynamics; and photochemical reflectance index (PRI) for detecting disease symptoms [7].
Normally sensors used in RS that are for crop monitoring detect the following electromagnetic wave bands, depending on specific objectives [7]:
- Thermal infrared band;
- Red, green, and blue (RGB) bands;
- Near infrared (NIR) band;
- Red edge band (RE).
The amplitude of the information retrieved from RS is considerable to support sustainable agriculture capable of feeding a rapidly growing world population. Among the prominent advantages or applications of RS are the identification of phenotypically better varieties, optimization of crop management, evapotranspiration, agriculture phenology, crop production forecasting, ecosystem services (related to soil or water resources) provision, plant and animal biodiversity screening, crop and land monitoring, and precision farming [8,18,19,40,41,42].
3. Artificial Intelligence and RS
In this new era of computing, the pace of technological advancement is reaching peaks as it never has before. Artificial intelligence (AI) has vast potential in the agricultural field, although it has not been fully explored in this sphere and is still in its infancy.
One of the subsets of AI is machine learning, which is used for operating definite tasks using a computer system [43] and is generally divided into supervised and unsupervised learning techniques. Similarly, neural networks, another basic pillar of AI, provide the basis for deep learning algorithms by recognizing patterns [44]. Although deep neural network (DNN) became famous in 2016, due to engineering complexities they are not very popular today. Instead, convolutional neural networks (CNNs) and recurrent neural network (RNN) architectures are becoming more popular and their application can be found in object detection, classification, segmentation, etc. [28].
It has been previously reported that machine and deep learning techniques are playing pivotal roles in the following three main domains of RS [10]:
Nonetheless, there is plenty of room to make the best use of these techniques that has not previously been undertaken. For example, Weiss et al. [18] reported that despite the potential to account for contextual information in space and time based on historical series, machine learning has been mainly exploited to estimate variables at the pixel and instantaneous level. Likewise, it is also important to consider the limitations of artificial intelligence tools applied to agricultural RS through the construction of training databases. The machine learning algorithms, describing the relation of causality between inputs and outputs, often cannot solidify the full complexity of a diverse relationship due to oversimplifications in reality [18,40]. Such limitations need to be resolved. The 5th industrial revolution is expected to address the challenges faced in RS to enhance the proficiency and productivity.
One of the most important areas in agricultural RS is plant stress detection. In this regard, image classification is the foremost area of deep learning application and gives a diagnostic decision (healthy or diseased) based on the input (one or two related images). For example, A CNN was used to detect and classify individual lesions and spots on a plant leaf, allowing to identify multiple diseases on the same leaf [51]. Researchers reported an increased accuracy of 12% compared to previously reported methods, which was over 75% overall. Similar applications to stress (biotic and abiotic) classification using AI principles have been reported using deep learning principles in apple, cassava, wheat, maize, tomato, soybean, grapevine, coffee, and rice [51,52,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67]. In the same way, various studies on segmentation and object detection, subsets of deep learning, include studies on cucumber diseases [68], fruit crop diseases [69], rice leaf diseases [70], cucumber leaf disease [71], tomato diseases and pests [57], grapevine esca disease [61], maize disease [72], strawberry disease [73], and sweet pepper disease [74]. Likewise, AI methods have been implied in diverse agricultural contexts, including high-throughput phenotyping [5], yield prediction [75], fruit detection [76], weed detection [77], and biomass studies [78].
Crops undergo a continuous change in their physiological characteristics over their lifecycles, and these physiological changes are greatly affected by stress (biotic or abiotic). AI is paving the way to make detection and identification processes of plant diseases faster, among other RS applications, but it is only based on obtained images, which hinders earlier detection of disease. Similarly, most of the commercial hyperspectral imaging sensors used in RS platforms can only work optimally under laboratory conditions. The other challenge is a lack of datasets for deep learning-assisted applications.
Another commonly associated product of RS technology in relation to AI is the decision support systems (DSS). Therefore, it would be important to highlight the potential and roles of DSS in agricultural RS.
Decision Support Systems (DSS)
Agricultural decision support systems (DSS) can simply be identified as the informative resources that facilitate farmers in their decision making, based on knowledge of various crop-growth parameters [79]. DSS involves data collection, organization, and analysis to provide either short-term or long-term decisions. For example, for pest or weed control, DSS can establish a list of prospective fertilizers to use, or even suggest integration of both chemical and non-chemical-based practices, based on the crop type, growth stage, etc. One such practical example is the recommendation of herbicide use along with the suggestion of non-chemical weed control by a DSS, which investigated 100 weed species and more than 30 crops, in Denmark [80].
Since RS provides near-real-time information, it can play a key role in the development of an efficient DSS, which will further support agricultural sustainability. RS provides the temporal and spatial attributes of a crop that can be used to improve decision making, as they can augment various field data and significant parameters [81]. For instance, DSS may establish a site-specific herbicide application map, predicting specific weed species or invasive plants [80]. Such technological interventions in this 5th industrial revolution have the potential to combat climate change (by reducing the use of fertilizers) and reduce input costs.
Despite the promising uses of DSS, its integration into agriculture is not prominent due to a number of factors. Examples of these limiting factors include high economic cost, lack of awareness or lower comprehension by farmers, the gap between the decision-making style required by DSS and the different types of farmer requirements, restrictions in capturing and storing environmental or biological data, etc. [79,80].
4. Sensors
The backbone of RS is the sensors that provide all the basic information, not only of crops, but also of the environment. The quality and yield of the plants is highly dependent on factors such as temperature, humidity, light, and the level of carbon dioxide (CO2) [82]. These factors, along with a variety of other parameters, can easily be measured using sensors [32]. Sensors usually serve for narrow band hyperspectral or broad band multispectral data acquisition, and can be space-borne, air-borne, and ground-based in terms of their respective use in satellites, RPAs, and fields or laboratories, respectively [40]. Currently, the most commonly used sensors in agricultural RS include synthetic aperture radar (SAR), near-infrared (NIR), light detection and ranging (LiDAR), fluorescence spectroscopy and imaging, multispectral, and visible RGB (VIS) sensors; thereby studying a variety of parameters according to needs. Table 1 lists the RS sensors, grouped under main categories, with their respective applications in agriculture. For an elaborated use of different sensors in agriculture, the study by Yang et al. [83] is recommended.
Ground-based sensors have long been in use, i.e., since the third industrial revolution, and those of the current era are wireless sensor technologies (WSTs). WSTs use radio frequency identification (RFID) and wireless sensor networks (WSN) [88]. The 5th industrial revolution has also resulted in rapid research and development in terms of smaller sensing devices, digital circuits, and radio frequency technology. The principal difference between RFID and WSN is that WSN permits multihop communication and network topologies, whereas no cooperative capabilities are offered by RFID devices. Now, WSNs are, not only the base of precision agriculture, but also that of precision livestock farming and precision poultry farming. RFID, which was basically developed for identification purposes, is currently being used for developing new wireless sensor devices. These systems comprise of a number of tiny sensor nodes (consisting of three basic components: sensing, processing, and communication) and few sinks. Each wireless sensor node can be employed in the desired crop field and are linked through a gateway unit, communicating with other computer systems via wireless local area networks (WLAN), local area networks (LAN), the Internet, wireless wide area network (WWAN), or controller area network (CAN), making use of standard protocols (i.e., general packet radio service (GPRS) or global system for mobile communication (GSM)) [10]. Given the maturity and potential of these technologies, they seem to be promising technologies for agricultural remote sensing. Another reason for WSN implementation in agriculture is a prerequisite of DSS is that it needs processed information rather than sensor-taken raw data. Therefore, WSNs using a meshed network of wireless sensors collect, process, and communicate the data for DSS, thus ensuring a controlled system [45].
WST applications in the agricultural sector have gone through considerable research and it is found to be very common in greenhouse and livestock monitoring applications. These applications are becoming more common by the day. Additionally, it is also important to consider challenges, e.g., weather conditions, reliable link quality above crop canopies, and coverage, that are faced when implementing radio frequencies in crop fields. It is also important in remote sensing that there be a mechanism of erroneous measurement detection, thereby rectifying wrongly collected data. Actual examples of the applications of WST, although few, include creating a mobile WSN connecting tractors or combining harvesters with other vehicles, enabling them to exchange data [10]. Recently, a customized WSN was used to detect fungal disease in a strawberry production using a distributed mesh network of wireless mini weather stations, equipped with relative humidity, temperature, and leaf wetness sensors. Similarly, other studies included the implementation of WSN in vineyards for precision viticulture and addressed heat summation and potential frost damage [10]. Similarly, various other studies on their application in irrigation, greenhouse, and horticulture domains have been reported [45]. However, it is important to consider that there is an immense need for a standard body to regulate agricultural sensor device development as well as their subsequent implementation in modeling and DSS.
These technologies have been in constant transition over the past few years, e.g., updating various ISO (International Organization for Standards) standards for RFID (ISO/IEC 18000, ISO 11784, etc.), Bluetooth, Wibree, WiFi, and ZigBee for WSNs [88,89]. Various studies have reported on the use of these technologies, such as the use of ZigBee for precision agriculture (elaborated by Sahitya et al. [90]). A substantial improvement in WSN for subsequent incorporation into satellites and RPAs will certainly augment the efficiency of these platforms. For a summary of some of the commonly implied sensors in agriculture that provide data about plant, soil, and climate conditions, the study by Abbasi et al. [89] is recommended.
A lot of renowned companies and institutes, including NASA, are involved in the production of novel and efficient sensors. For example, the Microsoft Kinect sensor developed in the last decade shows remarkable potential for rapid characterization of vegetation structure, as reported previously [91]. For a comprehensive study on the latest advances in sensor technology applied to the agricultural sector, the study by Kayad et al. is recommended [26].
Joint ventures by governments and academic institutes, apart from those of the private sector, in the implementation of sensor technology can bear rapid and efficient results, such as the Center of Satellite Communication and Remote Sensing at Istanbul Technical University (ITU), and the Turkish Statistical Institute joining hands to realize the sensor-driven agricultural monitoring and information system (TARBIL) project [92]. Various sensors are being currently invented and developed, through private firms and joint ventures, based on wireless technology for subsequent applications in viticulture, irrigation, greenhouse, horticulture, pest control, fertilization, etc. [89], but this also highlights the necessity of some regulating and standard bodies.
Similarly, John Deere, a leading farming equipment company, is currently undertaking various IoT projects, including sensor-fitted autonomous tractors, capable of yield estimation features, among various other features [93]. Apart from the industrial perspective, a great deal of research in the academic domain is also on the rise in this sphere. These technologies are promising for efficient and sustainable farming, which is basically expected in the 5th industrial revolution.
Satellites and RPAs are two prominent platforms of RS technology and therefore, it is important to consider their use in the 5th industrial revolution, mainly focusing on the agricultural sector. Various studies have highlighted the limitations of the one or the other, but both are beneficial in general. In this regard, their current and future roles in on-board sensors and cameras are reported here.
4.1. Satellite
One of the oldest and main platforms of RS technology is the satellite. In 1957, the first ever satellite: Sputnik 1, weighing 183 pounds and the size of a basketball, was launched into space by the Soviet Union [94]. It has been over 40 years since satellite systems became operational, but a milestone in RS was achieved with the creation of normalized difference vegetation index (NDVI) maps, providing information about land cover, phenology, and vegetation activity, using advanced very high resolution radiometer (AVHRR) [35]. In terms of improved performance, considering geometric, spectral, and radiometric properties, the moderate resolution imaging spectroradiometer (MODIS) significantly helped with remote sensing. MODIS instruments laid the foundation of a new era in remote sensing after their launch in 1999, providing 1-km spatial resolution GPP products [35].
Numerous satellites had been launched in the past two decades with various spatial and temporal resolutions [95], which proved to be the basis of the 5th technological revolution. Today, various privately-held and government-managed satellites harboring versatile sensors are an efficient foundation to RS, thereby providing huge sets of interpretable data and information. For example, Spain started its “National Remote Sensing Plan (PNT)” in 2004, aimed at data provisioning for various Spanish public administrations [96]. Although, it is important to bear in mind that this domain was envisaged with a little boost in 2008, when Landsat (US operated satellites) images were set freely accessible (under open license), and the launch of Sentinel 1A and Sentinel 2A satellites, in 2014 and 2015, respectively, under the Copernicus Program, further increased the momentum of RS. The Sentinel constellation is the part of Copernicus program that was launched by the European Commission and the European Space Agency (ESA). As more than 30 satellites provide data for this program, it is of great use to scientists to analyze the freely available data regarding agriculture. In addition, a separate database, titled “Copernicus Academic”, of the Copernicus program also facilitates the training and better utilization of satellite data [97]. Similarly, the Landsat program, launched by the United States as a joint venture between the National Aeronautics and Space Administration (NASA) and the United States Geological Survey (USGS), also offers free access to high-resolution images. The present needs are to wisely utilize these free accessible data to achieve ambitious agricultural goals. Furthermore, space-borne hyperspectral missions, such as ZY1-AHSI, PRISMA, DESIS, and GF5-AHSI, which launched recently, or are planned to be launched in upcoming years, such as SBG, CHIME, and EnMAP, are expected to augment agricultural monitoring in terms of vegetation functions and traits. It is imperative to address recurring limitations, such as soil background and canopy structure interference, signal variations in optical vegetation properties, and poor discrimination of functional traits due to lesser narrow spectral regions [2].
Recently, a cloud-free crop map service utilizing radar and optical data from Sentinel-1 and -2, respectively, was announced under a joint venture by two private companies i.e., VanderSat and BASF Digital Farming GmbH, thereby providing daily maps of field-scale crop biomass [98]. This advancement is a remarkable breakthrough in RS from satellites, as it has been a great challenge since the beginning of this technology. Recent advances in this technology are making it a fine and efficient technology through the use of machine learning. A study conducted by Mazzia et al. [99] reported a novel strategy for refining the freely available photos from satellites to minimize the errors often encountered by their low or moderate resolutions. This is an excellent example of the use of blended technology, where the authors trained a convolutional neural network using high-resolution images from RPA and then derived the NDVI to interpret the low- or moderate-resolution satellite images of vineyard vigor maps. Among other uses of this RS platform, one is the construction of historical maps of crops, as these play a significant role in crop prediction estimation and related simulations. Recently, a study established the relationship between MODIS-derived NDVI and the grain yields of wheat, barley, and all cereals for 20 European countries (including Austria, Belgium, Denmark, France, Germany, Ireland, Sweden, the United Kingdom, etc.). After analyzing the data from 2010 to 2018, a higher percentage of cereals was reported; 35% for arable land. The efficacy of yield prediction in relation to NDVI and cereals was reported as trustworthy over a good time period of 4 months [100]. More studies of this nature on a global scale are needed to strengthen the agriculture of today.
Implementation of existing technological tools is also very important. For instance, Google Earth Engine (GEE) offers diverse services in this domain for the agricultural industry. GEE facilitates product downloading of various satellites imagery (Landsat, Sentinels, MODIS, etc.) along with cloud-based management, by granting access either through an academic email or simply a standard Gmail account to their servers. Processing very large geospatial datasets often makes the process slow and difficult. In this regard, GEE, a cloud-based platform, facilitates access to high-performance computing resources without any cost. Systematic data products and interactive applications can be developed based on GEE once an algorithm is developed—thereby reducing the complexities of programming and application development [45]. A stepwise illustration for product downloads from GEE is presented in Figure 2, although the final exported product can be different from this illustration, based on the needs and preferred format.
A practical example of benefiting from free services GEE is presented as the construction of vegetation indices (VIs) maps for olive grove trees located at Guadahortuna (Granada, Spain) (Figure 3). Sentinel-2 images, between July 2020 and February 2021, were accessed through GEE, at a resolution of 10 × 10, and were processed to generate NDVI (as indicated in the below formula) vector tiles, followed by their export into GeoJSON format. The GeoJSON format is user friendly and generates data in the form of a table where each pixel represents a file with its NDVI value, which is quite handy to work with.
Likewise, another practical example of this nature is the data acquisition, via GEE, for a parcel of vineyard crop situated at Reggio Emilia (Emilia-Romagna, Italy) (Figure 4). In both of these examples, NDVI was calculated using the following formula:
where NIR is the near-infrared band and the VIS is the visible red. Bands 8 and 4 of Sentinel-2 were used given their desired spatial resolution of 10 m as well as their spectral range (e.g., bands 8 and 4 measure NIR and red spectral bands, respectively) to calculate the NDVI. These serve as an example of free data acquisition and processing; the future promises enormous possibilities. The only need is to make use of such freely available resources for academic, as well as real-world, applications.
Another important aspect of using satellite technology is the digital boundaries of crop fields that are a pre-requisite. Areas with intensive agriculture have solved this, but, for small crop areas (>1 ha), it persists. The 5th revolution is playing its part here. Recently, a novel method, “DESTIN”, of crop field delineation was reported with an accuracy of 95–99%, fusing temporal and spatial information acquired from WorldView and Planet satellite imagery [101]. Such types of studies are opening up the way for digitalizing agriculture and making it sustainable. This new era is not just about processing acquired data it is also about optimizing it for improved-quality products. For example, a recent study on formulating optimal segmentation parameters to obtain precise spatial information of agricultural parcels that normally suffer over- or under-segmentation is an evident demonstration of this idea [102]. This is not just limited to the optimization of satellite imagery, it is a way to achieve automation and implementation of these technologies on all scales.
4.2. Remotely Piloted Aircrafts (RPAs)
A rise in the use of this technology has been seen over the past decade given its worth as an integral part of RS technology. Intensive research has been conducted using RPAs, considering their application in crop monitoring, disease surveillance, soil analysis, irrigation, fertilization, mechanical pollination, weed management, crop harvest, crop insurance, tree plantation, etc. [7] (Figure 5), which obviously hints towards their remarkable potential in the agricultural sector.
The first use of RPAs in agriculture was reported as back as 1986 for monitoring Montana’s forest fires [7]. This 5th revolution is anticipated to make more frequent use of RPAs in farming. According to an estimate, RPAs and the agricultural robotics industry could be worth as much as 28 billion dollars by 2028 and up to 35 billion dollars by 2038 [103].
The use of RPA imagery consists of mission or flight planning, data collection, data processing, and information report generation. Several free resources are available for each of these purposes. For example, QGroundControl is an open-source software that can act as a ground control station (GCS) for RPAs. Similarly, several user-friendly open-source software titles are available in the market for image processing, orthomosaic assembly, digital surface model (DSM), and digital elevation model (DEM) constructions. Open Drone Map (ODM) is a prominent example of this, and offers creations and visualizations of orthomosaic, point cloud, 3D models, and other products [7]. RPAs offer better resolutions and flexibility of use over satellite imagery. A few such desired features help to monitor the most important crop parameters: nitrogen (N) and chlorophyll contents [36]. For example, Figure 6 shows an overview of the practical applications of RPAs to acquire Vis, such as NDVI, normalized difference red edge (NDRE) and thermal maps. A Yuneec Typhoon H hexacopter RPA, flown at a 100-m height, equipped with a multispectral camera (parrot sequoia) and a thermal sensor (Yuneec CGOET) was used to monitor olive crops in Cordoba, Spain. After processing the images, treatment zones were indicated depending upon the vegetation vigour, stress, and N content (Figure 7).
Quite a number of studies have reported on various aspect or uses of RPAs but it is interesting to learn what this new era means for one of these RS technologies. New research is being based on artificial intelligence to derive more detailed information about growth, yield, disease, and automation. For example, use of wireless sensor technology and control automation is on the rise in agriculture [104,105,106]. Some of the representative studies with respect to principal applications of RPAs in agriculture are summarized in Table 2.
One of the prominent features of this technology is its higher resolution than the satellite imagery—offering up to 0.2 m of spatial resolution, which is approximately 40,000 times better resolution that means more and high-quality information can be extracted from these images. Furthermore, laser imaging detection and ranging (LiDAR) systems are using this technology to pave the way towards building 3D maps of plant canopy, soil, and field analysis, which are crucial factors for yield estimation, irrigation, and nutrients estimation, such as for N [7]. Nevertheless, impeding metrological conditions, local and national regulations, limited spatial coverage due to battery or payload limits, along with a lack of standard procedures for inflight calibration of RPA sensors [18,107] are few of the constraints of this platform.
Likewise, it is also important to consider regional and national regulations for operating RPAs, although agricultural applications of RPAs do not invoke substantial risks for people. Government bodies are trying to cope with such regulations, but there is plenty of room for growth. In Europe, the European Union Aviation Safety Agency (EASA) presented legislative framework: “Easy Access Rules for Unmanned Aircraft Systems” (Regulations (EU) 2019/947 and (EU) 2019/945), in 2019, for RPA operations and it went into effect from 31 December 2020 [138]. The three principal categories established under this legislation are presented in Table 3. Safety of people, security, privacy, and data protection were the principal parameters considered for establishing these regulations. Nevertheless, most countries are struggling to establish standard regulations, and this requires urgent attention. A general list of RPA laws and regulations can be consulted in [139].
This new era is of the Internet of Drones (IoD), where a fleet of drones is deployed, controlled through a ground station server (GSS) via a wireless channel, to harvest the desired data. Currently, research is being undertaken to explore these possibilities for remote areas, where there is no Internet connection. For example, a recent study reported on the possibility of using a cellular network for this purpose [140]. An interesting study by Prasanna and Jebapriya [141] on the use of RPAs in smart agriculture, based on IoT, is highly recommended, where the possibilities of this novel technology with their practical examples are discussed. Similarly, novel applications of RPAs can also enrich RS technologies; for example, very recently, an RPA was used as a mobile gateway for a wireless sensor network (WSN), establishing a 24-m flying height and a 25-m antenna coverage provided maximum node density [142]. In the same way, the benefits of drone centimeter-scale multispectral imagery were investigated in sugar beet crop to improve the assessment of foliar and canopy parameters; five important structural and biochemical plant traits were reported, highlighting the importance of drone imagery for centimeter-scale characterization [4]. RPAs are already used for capturing videos and photos under specific flight plans, as such, setting an RPA as a node for a WSN is an efficient way to fully benefit from this RS tool.
Despite the appeal of IoD, security may be a recurring issue in upcoming years; large companies are already at the brink of this issue. For this reason, thorough research in this domain is recommended to ensure a reliable application of RS. A recent study undertaken on this aspect of technology offers the implementation of blockchain and smart contracts to safeguard data, which are then archived through IoT-enabled RPAs and sensors, with their respective deployment considerations [143]. Alternative and economical solutions are urgently required to address these issues.
4.3. Satellite and RPAs: A Complementing System
The use of RPAs versus satellites is often debated in the context of their agricultural applications. Nevertheless, the choice of any of these RS platforms is highly subjective to the needs of farmer and the crop to be studied. However, a minor comparison of these is presented considering their usefulness in RS.
Limited battery life and flight time hinder extensive spatial coverage using RPAs, despite being regarded as optimal for providing robust, reliable and efficient crop phenotyping [144]. RPAs offer lower operational costs; however, for large amounts of data (to cover larger areas), data processing costs increase exponentially. Similarly, flexibility with flying times and the significant resolution of RPA imagery are desirable characteristics over satellite imagery [7].
On the other hand, freely accessible satellite data are gaining popularity. Even so, these freely available data come with coarser spatial and temporal resolutions (with the exception of a few commercial satellites), and is being used to generate VIs. In this regard, AI offers leverage to fine-tune coarser satellite data based on high-resolution drone data [5]. Moreover, a large dataset for training AI models, despite poor quality or noisiness, generates substantial results compared to smaller datasets, indicating the importance of huge datasets obtained through satellite imagery [5]. This is why big data holds a remarkable position in this regard. For example, a previously reported study demonstrated the effectiveness of deep learning associated with the availability of large and high-quality training samples [145]. Furthermore, crop simulation models can be generated beforehand from these data for respective agronomic measures and crop yield estimations. Therefore, a complementing system based on these two RS platforms can supplement the efficiency of RS products.
5. Future Perspective
RS technology is anticipated to maximize the potential of the agricultural sector to feed future generations. Integration of modern science is greatly needed. A few possible future studies, with regard to the 5th industrial revolution, are hinted at below (Figure 8).
- −
- Satellites, RPAs, and sensors seek a vast amount of data in a raw form, which requires tiresome pre-processing, processing, and data evaluation procedures. This is where big data comes in play and ML can be applied to handle this difficult task as an effective tool for managing and processing huge data sets, as has also been previously reported [42]. Although traditional ML methods (i.e., artificial neural networks, random forests, and support vector machines) provide the characteristics of a subject under study, these prove to be subjective and cumbersome processes when dealing with the problems of a complex domain, e.g., yield estimation of a crop or highly dimensional datasets [42]. Therefore, selection of key features is very important to further train models for a higher accuracy. Furthermore, such machine and deep learning models for various crop characteristics (i.e., stress, disease, ripeness, etc.) are urgently required for almost all of crops. For example, postharvest grading processes can be easily regulated by the implementation of quality-based ML fruit classification models. Similarly, an image offers a great deal of information, such as chlorophyll, plant canopy, size, color, fruit number, etc., which can be analyzed using various ML networks with the potential of minimizing input costs and making the crop yield more profitable.
- −
- Incorporation of GIS-enabled biosensors into plants cannot only help to reveal plant molecular processes, e.g., nutrients assimilation, production of antioxidants, etc., but also the location of pathogenic attack, drought stress, and other valuable growth parameters.
- −
- Novel low-cost sensors are highly in demand and can certainly complement the efficiency of RS technology. For example, novel sensors detecting ethylene gas levels, which is an indicator of fruit ripening [146], can help farmers to make essential management decisions before harvest. Similarly, durable ground-based sensors can be incorporated with cellular and WST technology for real time information gathering, as well as programing for respective measures. Further novel applications of sensor, as well as new sensors measuring a variety of parameters, can certainly take RS technology to another level.
- −
- An integrated and complementing system for satellites, automatically guided land vehicles (AGVs), and RPA imagery could be quite beneficial to overcome physical hurdles in data acquisition and improving the efficiency and accuracy of these technologies. Novel algorithms can also fill in this gap and, therefore, research should be focused on this domain.
- −
- Given the tremendous potential of LiDAR, it could be used to extract architectural information of crops, as well as of forests. Such morphological information can pave the way to unveil growth processes, phenotypic explorations, structural patterns, establishing biomass–yield relationships, etc. Using AI, this information could be amplified for various other plant species and even to simulate plants developmental behavior in space.
- −
- Freely available satellite imagery with coarse temporal and spatial resolutions have not been exploited for scale-appropriate precision agriculture applications [147]. These free resources can be manipulated in a number of ways to extract desired information; for example, historical and current field data can be a game changer for estimating soil fertility status, which immensely influences crop yield. Similarly, distanced and under-nourished plants in a field patch indicate inadequate growth conditions, e.g., salinity stress, drought stress, shallow patch, etc. This is quite valuable information for assuring precision.
- −
- The maturity of 5th generation (5G) technology is increasing the possibilities of automation of field processes and the acquisition of real-time information. During this 5th industrial revolution, 5G is a substantial performer that has the potential, not only to facilitate high speed connectivity, but also faster data acquisition followed by analysis. For example, Google Earth, a free geolocation search engine, facilitates access to satellite imagery and integrates a processing code that could generate NDVI in turn [148], subsequently producing desired analytics in a mobile application or webpage. A practical example is the private company Graniot, operating in Spain [149]. Another interesting implementation of 5G could be the real time streaming of ultra-high definition images (4K–8K), taken by RPAs along with its potential to overcome the severe regulations on beyond visual line of sight (BVLOS) flight challenges. These tools are not limited to these kinds of applications, but rather to the unlimited opportunities. Further startups of this kind can help to achieve sustainable agriculture.
- −
- Masking all the data analyzing processes and protecting the end user, especially farmers, from the perplexity of technical processes in the form of graphical user interfaces (GUIs) could greatly boost the incorporation of these technologies among small-scale farmers. Only a limited number of studies have been reported where a user can visualize and interpret data in the form of mobile or tablet applications [150,151,152]. The invention of such types of GUIs can further ease sustainability and the profitability of the sector.
- −
- Benefiting from radio signals, television communication systems and cellular data are also appealing aspects of RS applications in rural areas. Another attractive option is the use of hotspot satellites for the determined range and area. RS technology is quite mature in developed countries, but, for developing countries, these tools can outweigh resource scarcity.
- −
- An anticipated model considering this 5th revolution can be envisioned as one where data acquisition resources (e.g., sensors, RPAs, WSN, etc.) operate in synergy with field actors (e.g., tractors, AGVs, irrigation systems, spray systems, robots, etc.). Acquired crop data are then processed by cloud computing platforms, and ultimately generate insightful results. Thus, enabling the end user to interpret, make a reasoned decision or program a regulated activity through the corresponding GUI. Figure 9 shows this anticipated model.
- −
- The incorporation of RS technologies into agriculture can facilitate sector sustainability, but the associated costs could be a hindering factor. Today, most sensors applied in agriculture are quite expensive, along with the hiring of third party services for data interpretation. This is quite a big hurdle that need to be resolved.
- −
- Similarly, providing farmers with the basic skills needed for RS technology and training a fleet of young scientists can ease frustrations among people directly related to agriculture, like farmers, agronomists, extension workers, etc. The rate of adoption of a technology can be augmented using such measures. Private and public bodies can equally contribute to this sphere.
- −
- RS technology is no longer in its nascent phase and, therefore, a framework of proper vocabulary and standardization is urgently needed. Various terminologies are in use today that only create more confusion. An example of this problem is the naming of RPA technology—unmanned air vehicle (UAV) is the proper term for drones for few scientists, whereas others consider this term obsolete [7].
6. Conclusions
The study aimed to convey an overview of the principal players of RS technology, including satellites, RPAs, and sensors, in this new era of the 5th industrial revolution (of agriculture 5.0); thus, highlighting its importance in achieving SDG-2. Satellites occupy a prominent place in RS technology that can be appended with IoD to maximize its potential in assuring sustainable agriculture. Satellite imagery data are freely accessible, and RPA technology becoming more and more economical with each passing day. Integrated application of these RS components and training ML models is what is expected from this 5th revolution. Few studies have been done on cohesive applications of AI in this field, such as automation in the fruit grading process, crop variety identification, visual representation of data analysis in the mobile applications, etc. Moving forward, the aim is to improve resource use efficiency. Similarly, there is a need to address the limitations of AI in terms of model training, standardization, and oversimplifications of reality.
With the novel technologies come the novel challenges; initiating novel research projects addressing challenges of data privacy, slow data processing, lack of historical maps, cost of sensors, standardization, processing complexity, training, etc., can effectively contribute to, not only the dissemination of novel technologies, e.g., IoT, IoE, IoD, ML, etc., but also adoption, thereby promising a sustainable agriculture 5.0.
Author Contributions
V.M. conceptualized the idea. V.M. and A.A. contributed in the design, preparation, and writing of the manuscript, followed by revisions from P.C. and J.O. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the projects: “VIRTUOUS” funded by the European Union’s Horizon 2020 Project H2020-MSCA-RISE-2019. Ref. 872181, “SUSTAINABLE” funded by the European Union’s Horizon 2020 Project H2020-MSCA-RISE-2020. Ref. 101007702 and the “Project of Excellence” from Junta de Andalucia 2020. Ref. P18-H0-4700. The funders had no role in study design, data collection and analysis, decision to publish, or preparation of the manuscript.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Acknowledgments
Images facilitation by Graniot, an agricultural remote-sensing-based firm in Spain, is acknowledged (Figure 3 and Figure 4). Similarly, cooperation from MC Biodrone, an agricultural company in Spain, is highly appreciated in terms of facilitating vegetation indeices maps for olive crops (Figure 6 and Figure 7).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Comission, E. Industry 5.0: Towards More Sustainable, Resilient and Human-Centric Industry. Available online: https://ec.europa.eu/info/news/industry-50-towards-more-sustainable-resilient-and-human-centric-industry-2021-jan-07_en (accessed on 10 January 2021).
- FAO. Available online: http://www.fao.org/3/cb1000es/cb1000es.pdf (accessed on 9 April 2021).
- UN. Available online: https://www.un.org/sustainabledevelopment (accessed on 9 April 2021).
- FAO Sdgs. Available online: http://www.fao.org/3/I9900ES/i9900es.PDF (accessed on 8 April 2021).
- Jung, J.; Maeda, M.; Chang, A.; Bhandari, M.; Ashapure, A.; Landivar-Bowles, J. The potential of remote sensing and artificial intelligence as tools to improve the resilience of agriculture production systems. Curr. Opin. Biotechnol. 2021, 70, 15–22. [Google Scholar] [CrossRef]
- Khanal, S.; KC, K.; Fulton, J.P.; Shearer, S.; Ozkan, E. Remote sensing in agriculture—Accomplishments, limitations, and opportunities. Remote Sens. 2020, 12, 3783. [Google Scholar] [CrossRef]
- Ahmad, A.; Ordoñez, J.; Cartujo, P.; Martos, V. Remotely Piloted Aircraft (RPA) in Agriculture: A Pursuit of Sustainability. Agronomy 2021, 11, 7. [Google Scholar] [CrossRef]
- Wulder, M.A.; Loveland, T.R.; Roy, D.P.; Crawford, C.J.; Masek, J.G.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Belward, A.S.; Cohen, W.B. Current status of Landsat program, science, and applications. Remote Sens. Environ. 2019, 225, 127–147. [Google Scholar] [CrossRef]
- Joint, F.; World Health Organization; WHO Expert Committee on Food Additives. Evaluation of Certain Contaminants in Food: Eighty-Third Report of the Joint FAO/WHO Expert Committee on Food Additives; World Health Organization: Geneva, Switzerland, 2017. [Google Scholar]
- Lary, D.J.; Alavi, A.H.; Gandomi, A.H.; Walker, A.L. Machine learning in geosciences and remote sensing. Geosci. Front. 2016, 7, 3–10. [Google Scholar] [CrossRef] [Green Version]
- Marcu, I.; Suciu, G.; Bălăceanu, C.; Vulpe, A.; Drăgulinescu, A.-M. Arrowhead Technology for Digitalization and Automation Solution: Smart Cities and Smart Agriculture. Sensors 2020, 20, 1464. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- SWAMP. Available online: http://swamp-project.org/ (accessed on 17 February 2021).
- VIRTUOUS. Available online: https://cordis.europa.eu/project/id/872181 (accessed on 14 February 2021).
- NEWBIE. Available online: https://cordis.europa.eu/project/id/772835 (accessed on 17 February 2021).
- AGRO.COM. Available online: https://profesionalagro.com/noticias/drones-e-inteligencia-artificial-en-agricultura-mejor-rendimiento.html (accessed on 18 February 2021).
- Zhang, Y.; Migliavacca, M.; Penuelas, J.; Ju, W. Advances in Hyperspectral Remote Sensing of Vegetation Traits and Functions; Elsevier: Amsterdam, The Netherlands, 2021. [Google Scholar]
- Zhang, N.; Yang, G.; Pan, Y.; Yang, X.; Chen, L.; Zhao, C. A Review of Advanced Technologies and Development for Hyperspectral-Based Plant Disease Detection in the Past Three Decades. Remote Sens. 2020, 12, 3188. [Google Scholar] [CrossRef]
- Weiss, M.; Jacob, F.; Duveiller, G. Remote sensing for agricultural applications: A meta-review. Remote Sens. Environ. 2020, 236, 111402. [Google Scholar] [CrossRef]
- Sishodia, R.P.; Ray, R.L.; Singh, S.K. Applications of remote sensing in precision agriculture: A review. Remote Sens. 2020, 12, 3136. [Google Scholar] [CrossRef]
- Singh, P.; Pandey, P.C.; Petropoulos, G.P.; Pavlides, A.; Srivastava, P.K.; Koutsias, N.; Deng, K.A.K.; Bao, Y. Hyperspectral remote sensing in precision agriculture: Present status, challenges, and future trends. In Hyperspectral Remote Sensing; Elsevier: Amsterdam, The Netherlands, 2020; pp. 121–146. [Google Scholar]
- Saiz-Rubio, V.; Rovira-Más, F. From smart farming towards agriculture 5.0: A review on crop data management. Agronomy 2020, 10, 207. [Google Scholar] [CrossRef] [Green Version]
- Pascucci, S.; Pignatti, S.; Casa, R.; Darvishzadeh, R.; Huang, W. Special Issue “Hyperspectral Remote Sensing of Agriculture and Vegetation”. Remote Sens. 2020, 12, 3665. [Google Scholar] [CrossRef]
- Messina, G.; Peña, J.M.; Vizzari, M.; Modica, G. A Comparison of UAV and Satellites Multispectral Imagery in Monitoring Onion Crop. An Application in the ‘Cipolla Rossa di Tropea’(Italy). Remote Sens. 2020, 12, 3424. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Sagan, V.; Sidike, P.; Daloye, A.M.; Erkbol, H.; Fritschi, F.B. Crop Monitoring Using Satellite/UAV Data Fusion and Machine Learning. Remote Sens. 2020, 12, 1357. [Google Scholar] [CrossRef]
- Lu, B.; Dao, P.D.; Liu, J.; He, Y.; Shang, J. Recent advances of hyperspectral imaging technology and applications in agriculture. Remote Sens. 2020, 12, 2659. [Google Scholar] [CrossRef]
- Kayad, A.; Paraforos, D.S.; Marinello, F.; Fountas, S. Latest Advances in Sensor Applications in Agriculture. Agriculture 2020, 10, 362. [Google Scholar] [CrossRef]
- García, L.; Parra, L.; Jimenez, J.M.; Lloret, J.; Lorenz, P. IoT-Based Smart Irrigation Systems: An Overview on the Recent Trends on Sensors and IoT Systems for Irrigation in Precision Agriculture. Sensors 2020, 20, 1042. [Google Scholar] [CrossRef] [Green Version]
- Gao, Z.; Luo, Z.; Zhang, W.; Lv, Z.; Xu, Y. Deep learning application in plant stress imaging: A review. AgriEngineering 2020, 2, 430–446. [Google Scholar] [CrossRef]
- Escamilla-García, A.; Soto-Zarazúa, G.M.; Toledano-Ayala, M.; Rivas-Araiza, E.; Gastélum-Barrios, A. Applications of Artificial Neural Networks in Greenhouse Technology and Overview for Smart Agriculture Development. Appl. Sci. 2020, 10, 3835. [Google Scholar] [CrossRef]
- Cardim Ferreira Lima, M.; Damascena de Almeida Leandro, M.E.; Valero, C.; Pereira Coronel, L.C.; Gonçalves Bazzo, C.O. Automatic Detection and Monitoring of Insect Pests—A Review. Agriculture 2020, 10, 161. [Google Scholar] [CrossRef]
- Bolfe, É.L.; Jorge, L.A.d.C.; Sanches, I.D.A.; Luchiari Júnior, A.; da Costa, C.C.; Victoria, D.d.C.; Inamasu, R.Y.; Grego, C.R.; Ferreira, V.R.; Ramirez, A.R. Precision and Digital Agriculture: Adoption of Technologies and Perception of Brazilian Farmers. Agriculture 2020, 10, 653. [Google Scholar] [CrossRef]
- Astill, J.; Dara, R.A.; Fraser, E.D.; Roberts, B.; Sharif, S. Smart poultry management: Smart sensors, big data, and the internet of things. Comput. Electron. Agric. 2020, 170, 105291. [Google Scholar] [CrossRef]
- Armenta-Medina, D.; Ramirez-delReal, T.A.; Villanueva-Vásquez, D.; Mejia-Aguirre, C. Trends on Advanced Information and Communication Technologies for Improving Agricultural Productivities: A Bibliometric Analysis. Agronomy 2020, 10, 1989. [Google Scholar] [CrossRef]
- Shafi, U.; Mumtaz, R.; García-Nieto, J.; Hassan, S.A.; Zaidi, S.A.R.; Iqbal, N. Precision agriculture techniques and practices: From considerations to applications. Sensors 2019, 19, 3796. [Google Scholar] [CrossRef] [Green Version]
- Ryu, Y.; Berry, J.A.; Baldocchi, D.D. What is global photosynthesis? History, uncertainties and opportunities. Remote Sens. Environ. 2019, 223, 95–114. [Google Scholar] [CrossRef]
- Maes, W.H.; Steppe, K. Perspectives for remote sensing with unmanned aerial vehicles in precision agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef] [PubMed]
- Cao, L.; Liu, H.; Fu, X.; Zhang, Z.; Shen, X.; Ruan, H. Comparison of UAV LiDAR and digital aerial photogrammetry point clouds for estimating forest structural attributes in subtropical planted forests. Forests 2019, 10, 145. [Google Scholar] [CrossRef] [Green Version]
- Tripodi, P.; Massa, D.; Venezia, A.; Cardi, T. Sensing technologies for precision phenotyping in vegetable crops: Current status and future challenges. Agronomy 2018, 8, 57. [Google Scholar] [CrossRef] [Green Version]
- Liakos, K.G.; Busato, P.; Moshou, D.; Pearson, S.; Bochtis, D. Machine learning in agriculture: A review. Sensors 2018, 18, 2674. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Chen, Z.-x.; Tao, Y.; Huang, X.-z.; Gu, X.-f. Agricultural remote sensing big data: Management and applications. J. Integr. Agric. 2018, 17, 1915–1931. [Google Scholar] [CrossRef]
- Deery, D.; Jimenez-Berni, J.; Jones, H.; Sirault, X.; Furbank, R. Proximal remote sensing buggies and potential applications for field-based phenotyping. Agronomy 2014, 4, 349–379. [Google Scholar] [CrossRef] [Green Version]
- Zheng, C.; Abd-Elrahman, A.; Whitaker, V. Remote Sensing and Machine Learning in Crop Phenotyping and Management, with an Emphasis on Applications in Strawberry Farming. Remote Sens. 2021, 13, 531. [Google Scholar] [CrossRef]
- Koza, J.R.; Bennett, F.H.; Andre, D.; Keane, M.A. Automated design of both the topology and sizing of analog electrical circuits using genetic programming. In Artificial Intelligence in Design’96; Springer: Dordrecht, The Netherlands, 1996; pp. 151–170. [Google Scholar]
- Gu, J.; Wang, Z.; Kuen, J.; Ma, L.; Shahroudy, A.; Shuai, B.; Liu, T.; Wang, X.; Wang, G.; Cai, J. Recent advances in convolutional neural networks. Pattern Recognit. 2018, 77, 354–377. [Google Scholar] [CrossRef] [Green Version]
- Heung, B.; Ho, H.C.; Zhang, J.; Knudby, A.; Bulmer, C.E.; Schmidt, M.G. An overview and comparison of machine-learning techniques for classification purposes in digital soil mapping. Geoderma 2016, 265, 62–77. [Google Scholar] [CrossRef]
- Shelestov, A.; Lavreniuk, M.; Kussul, N.; Novikov, A.; Skakun, S. Exploring Google Earth Engine platform for big data processing: Classification of multi-temporal satellite imagery for crop mapping. Front. Earth Sci. 2017, 5, 17. [Google Scholar] [CrossRef] [Green Version]
- Gómez-Dans, J.L.; Lewis, P.E.; Disney, M. Efficient emulation of radiative transfer codes using Gaussian processes and application to land surface parameter inferences. Remote Sens. 2016, 8, 119. [Google Scholar] [CrossRef] [Green Version]
- Yuzugullu, O.; Marelli, S.; Erten, E.; Sudret, B.; Hajnsek, I. Determining rice growth stage with X-band SAR: A metamodel based inversion. Remote Sens. 2017, 9, 460. [Google Scholar] [CrossRef] [Green Version]
- Ali, I.; Greifeneder, F.; Stamenkovic, J.; Neumann, M.; Notarnicola, C. Review of machine learning approaches for biomass and soil moisture retrievals from remote sensing data. Remote Sens. 2015, 7, 16398–16421. [Google Scholar] [CrossRef] [Green Version]
- Verrelst, J.; Malenovský, Z.; Van der Tol, C.; Camps-Valls, G.; Gastellu-Etchegorry, J.-P.; Lewis, P.; North, P.; Moreno, J. Quantifying vegetation biophysical variables from imaging spectroscopy data: A review on retrieval methods. Surv. Geophys. 2019, 40, 589–629. [Google Scholar] [CrossRef] [Green Version]
- Barbedo, J.G.A. Plant disease identification from individual lesions and spots using deep learning. Biosyst. Eng. 2019, 180, 96–107. [Google Scholar] [CrossRef]
- Liu, B.; Zhang, Y.; He, D.; Li, Y. Identification of apple leaf diseases based on deep convolutional neural networks. Symmetry 2018, 10, 11. [Google Scholar] [CrossRef] [Green Version]
- Ramcharan, A.; Baranowski, K.; McCloskey, P.; Ahmed, B.; Legg, J.; Hughes, D.P. Deep learning for image-based cassava disease detection. Front. Plant Sci. 2017, 8, 1852. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lu, J.; Hu, J.; Zhao, G.; Mei, F.; Zhang, C. An in-field automatic wheat disease diagnosis system. Comput. Electron. Agric. 2017, 142, 369–379. [Google Scholar] [CrossRef] [Green Version]
- DeChant, C.; Wiesner-Hanks, T.; Chen, S.; Stewart, E.L.; Yosinski, J.; Gore, M.A.; Nelson, R.J.; Lipson, H. Automated identification of northern leaf blight-infected maize plants from field imagery using deep learning. Phytopathology 2017, 107, 1426–1432. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kaneda, Y.; Shibata, S.; Mineno, H. Multi-modal sliding window-based support vector regression for predicting plant water stress. Knowl. Based Syst. 2017, 134, 135–148. [Google Scholar] [CrossRef]
- Fuentes, A.; Yoon, S.; Kim, S.C.; Park, D.S. A robust deep-learning-based detector for real-time tomato plant diseases and pests recognition. Sensors 2017, 17, 2022. [Google Scholar] [CrossRef] [Green Version]
- Rangarajan, A.K.; Purushothaman, R. Disease classification in eggplant using pre-trained vgg16 and msvm. Sci. Rep. 2020, 10, 1–11. [Google Scholar]
- Ghosal, S.; Blystone, D.; Singh, A.K.; Ganapathysubramanian, B.; Singh, A.; Sarkar, S. An explainable deep machine vision framework for plant stress phenotyping. Proc. Natl. Acad. Sci. USA 2018, 115, 4613–4618. [Google Scholar] [CrossRef] [Green Version]
- Too, E.C.; Yujian, L.; Njuki, S.; Yingchun, L. A comparative study of fine-tuning deep learning models for plant disease identification. Proc. Natl. Acad. Sci. USA 2019, 161, 272–279. [Google Scholar] [CrossRef]
- Rançon, F.; Bombrun, L.; Keresztes, B.; Germain, C. Comparison of SIFT encoded and deep learning features for the classification and detection of Esca disease in Bordeaux vineyards. Remote Sens. 2019, 11, 1. [Google Scholar] [CrossRef] [Green Version]
- An, J.; Li, W.; Li, M.; Cui, S.; Yue, H. Identification and classification of maize drought stress using deep convolutional neural network. Symmetry 2019, 11, 256. [Google Scholar] [CrossRef] [Green Version]
- Cruz, A.; Ampatzidis, Y.; Pierro, R.; Materazzi, A.; Panattoni, A.; De Bellis, L.; Luvisi, A. Detection of grapevine yellows symptoms in Vitis vinifera L. with artificial intelligence. Comput. Electron. Agric. 2019, 157, 63–76. [Google Scholar] [CrossRef]
- Liang, W.-j.; Zhang, H.; Zhang, G.-f.; Cao, H.-x. Rice blast disease recognition using a deep convolutional neural network. Sci. Rep. 2019, 9, 1–10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Esgario, J.G.; Krohling, R.A.; Ventura, J.A. Deep learning for classification and severity estimation of coffee leaf biotic stress. Comput. Electron. Agric. 2020, 169, 105162. [Google Scholar] [CrossRef] [Green Version]
- Brahimi, M.; Mahmoudi, S.; Boukhalfa, K.; Moussaoui, A. Deep interpretable architecture for plant diseases classification. In Proceedings of the 2019 Signal Processing: Algorithms, Architectures, Arrangements, and Applications (SPA), Poznan, Poland, 18–20 September 2019; pp. 111–116. [Google Scholar]
- Jin, X.; Jie, L.; Wang, S.; Qi, H.J.; Li, S.W. Classifying wheat hyperspectral pixels of healthy heads and Fusarium head blight disease using a deep neural network in the wild field. Remote Sens. 2018, 10, 395. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.-W.; Chen, J.-L. Toward intelligent agriculture service platform with lora-based wireless sensor network. In Proceedings of the 2018 IEEE International Conference on Applied System Invention (ICASI), Chiba, Japan, 13–17 April 2018; pp. 204–207. [Google Scholar]
- Khan, M.A.; Akram, T.; Sharif, M.; Awais, M.; Javed, K.; Ali, H.; Saba, T. CCDF: Automatic system for segmentation and recognition of fruit crops diseases based on correlation coefficient and deep CNN features. Comput. Electron. Agric. 2018, 155, 220–236. [Google Scholar] [CrossRef]
- Das, S.; Roy, D.; Das, P. Disease Feature Extraction and Disease Detection from Paddy Crops Using Image Processing and Deep Learning Technique. In Computational Intelligence in Pattern Recognition; Springer: Berlin/Heidelberg, Germany, 2020; pp. 443–449. [Google Scholar]
- Zhang, S.; Zhang, S.; Zhang, C.; Wang, X.; Shi, Y. Cucumber leaf disease identification with global pooling dilated convolutional neural network. Comput. Electron. Agric. 2019, 162, 422–430. [Google Scholar] [CrossRef]
- Stewart, E.L.; Wiesner-Hanks, T.; Kaczmar, N.; DeChant, C.; Wu, H.; Lipson, H.; Nelson, R.J.; Gore, M.A. Quantitative phenotyping of Northern Leaf Blight in UAV images using deep learning. Remote Sens. 2019, 11, 2209. [Google Scholar] [CrossRef] [Green Version]
- Nie, X.; Wang, L.; Ding, H.; Xu, M. Strawberry verticillium wilt detection network based on multi-task learning and attention. IEEE Access 2019, 7, 170003–170011. [Google Scholar] [CrossRef]
- Lin, T.-L.; Chang, H.-Y.; Chen, K.-H. The pest and disease identification in the growth of sweet peppers using faster R-CNN and mask R-CNN. J. Internet Technol. 2020, 21, 605–614. [Google Scholar]
- Fu, Z.; Jiang, J.; Gao, Y.; Krienke, B.; Wang, M.; Zhong, K.; Cao, Q.; Tian, Y.; Zhu, Y.; Cao, W. Wheat growth monitoring and yield estimation based on multi-rotor unmanned aerial vehicle. Remote Sens. 2020, 12, 508. [Google Scholar] [CrossRef] [Green Version]
- Apolo-Apolo, O.; Martínez-Guanter, J.; Egea, G.; Raja, P.; Pérez-Ruiz, M. Deep learning techniques for estimation of the yield and size of citrus fruits using a UAV. Eur. J. Agron. 2020, 115, 126030. [Google Scholar] [CrossRef]
- Huang, H.; Deng, J.; Lan, Y.; Yang, A.; Deng, X.; Zhang, L. A fully convolutional network for weed mapping of unmanned aerial vehicle (UAV) imagery. PLoS ONE 2018, 13, e0196302. [Google Scholar] [CrossRef] [Green Version]
- Näsi, R.; Viljanen, N.; Kaivosoja, J.; Alhonoja, K.; Hakala, T.; Markelin, L.; Honkavaara, E. Estimating biomass and nitrogen amount of barley and grass using UAV and aircraft based spectral and photogrammetric 3D features. Remote Sens. 2018, 10, 1082. [Google Scholar] [CrossRef] [Green Version]
- Adebayo, S.; Ogunti, E.O.; Akingbade, F.K.; Oladimeji, O. A review of decision support system using mobile applications in the provision of day to day information about farm status for improved crop yield. Period. Eng. Nat. Sci. (PEN) 2018, 6, 89–99. [Google Scholar] [CrossRef] [Green Version]
- Kanatas, P.; Travlos, I.S.; Gazoulis, I.; Tataridas, A.; Tsekoura, A.; Antonopoulos, N. Benefits and limitations of decision support systems (DSS) with a special emphasis on weeds. Agronomy 2020, 10, 548. [Google Scholar] [CrossRef] [Green Version]
- Barnes, E.; Baker, M.; Pinter, P.; Jones, D. Integration of Remote Sensing and Crop Models to Provide Decision Support for Precision Crop Management. In Geospat. Inf.; 1998. Available online: https://www.ars.usda.gov/research/publications/publication/?seqNo115=91023 (accessed on 9 April 2021).
- Ahonen, T.; Virrankoski, R.; Elmusrati, M. Greenhouse monitoring with wireless sensor network. In Proceedings of the 2008 IEEE/ASME International Conference on Mechtronic and Embedded Systems and Applications, Beijing, China, 12–15 October 2008; pp. 403–408. [Google Scholar]
- Yang, G.; Liu, J.; Zhao, C.; Li, Z.; Huang, Y.; Yu, H.; Xu, B.; Yang, X.; Zhu, D.; Zhang, X. Unmanned aerial vehicle remote sensing for field-based crop phenotyping: Current status and perspectives. Front. Plant Sci. 2017, 8, 1111. [Google Scholar] [CrossRef] [PubMed]
- Steele-Dunne, S.C.; McNairn, H.; Monsivais-Huertero, A.; Judge, J.; Liu, P.-W.; Papathanassiou, K. Radar remote sensing of agricultural canopies: A review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2249–2273. [Google Scholar] [CrossRef] [Green Version]
- Mishra, P.; Asaari, M.S.M.; Herrero-Langreo, A.; Lohumi, S.; Diezma, B.; Scheunders, P. Close range hyperspectral imaging of plants: A review. Biosyst. Eng. 2017, 164, 49–67. [Google Scholar] [CrossRef]
- Corp, L.A.; McMurtrey, J.E.; Middleton, E.M.; Mulchi, C.L.; Chappelle, E.W.; Daughtry, C.S. Fluorescence sensing systems: In vivo detection of biophysical variations in field corn due to nitrogen supply. Remote Sens. Environ. 2003, 86, 470–479. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR system with application to forest inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar] [CrossRef] [Green Version]
- Ruiz-Garcia, L.; Lunadei, L.; Barreiro, P.; Robla, I. A review of wireless sensor technologies and applications in agriculture and food industry: State of the art and current trends. Sensors 2009, 9, 4728–4750. [Google Scholar] [CrossRef] [Green Version]
- Abbasi, A.Z.; Islam, N.; Shaikh, Z.A. A review of wireless sensors and networks’ applications in agriculture. Comput. Stand. Interfaces 2014, 36, 263–270. [Google Scholar]
- Sahitya, G.; Balaji, N.; Naidu, C.D.; Abinaya, S. Designing a wireless sensor network for precision agriculture using zigbee. In Proceedings of the 2017 IEEE 7th International Advance Computing Conference (IACC), Hyderabad, India, 5–7 January 2017; pp. 287–291. [Google Scholar]
- Azzari, G.; Goulden, M.L.; Rusu, R.B. Rapid characterization of vegetation structure with a Microsoft Kinect sensor. Sensors 2013, 13, 2384–2398. [Google Scholar] [CrossRef] [Green Version]
- Iban, M.C.; Aksu, O. A model for big spatial rural data infrastructure in Turkey: Sensor-driven and integrative approach. Land Use Policy 2020, 91, 104376. [Google Scholar] [CrossRef]
- INSIDER. Available online: https://www.businessinsider.com/smart-farming-iot-agriculture (accessed on 7 February 2021).
- NASA. NASA Knows. Available online: https://www.nasa.gov/audience/forstudents/5-8/features/nasa-knows/what-is-a-satellite-58.html (accessed on 17 January 2021).
- Al-Yaari, A.; Wigneron, J.-P.; Dorigo, W.; Colliander, A.; Pellarin, T.; Hahn, S.; Mialon, A.; Richaume, P.; Fernandez-Moran, R.; Fan, L. Assessment and inter-comparison of recently developed/reprocessed microwave satellite soil moisture products using ISMN ground-based measurements. Remote Sens. Environ. 2019, 224, 289–303. [Google Scholar] [CrossRef]
- Institute, N.G. National Remote Sensing Plan. Available online: https://pnt.ign.es/que-es-pnt (accessed on 21 January 2021).
- Copernicus. Available online: https://www.copernicus.eu/es (accessed on 21 January 2021).
- ESA. Available online: https://www.esa.int/Applications/Observing_the_Earth/Copernicus/Sentinel-1/Cloud-free_crop_maps_foster_sustainable_farming (accessed on 21 January 2021).
- Mazzia, V.; Comba, L.; Khaliq, A.; Chiaberge, M.; Gay, P. UAV and Machine Learning Based Refinement of a Satellite-Driven Vegetation Index for Precision Agriculture. Sensors 2020, 20, 2530. [Google Scholar] [CrossRef] [PubMed]
- Panek, E.; Gozdowski, D. Relationship between MODIS Derived NDVI and Yield of Cereals for Selected European Countries. Agronomy 2021, 11, 340. [Google Scholar] [CrossRef]
- Cheng, T.; Ji, X.; Yang, G.; Zheng, H.; Ma, J.; Yao, X.; Zhu, Y.; Cao, W. DESTIN: A new method for delineating the boundaries of crop fields by fusing spatial and temporal information from WorldView and Planet satellite imagery. Comput. Electron. Agric. 2020, 178, 105787. [Google Scholar] [CrossRef]
- Tetteh, G.O.; Gocht, A.; Conrad, C. Optimal parameters for delineating agricultural parcels from satellite images based on supervised Bayesian optimization. Comput. Electron. Agric. 2020, 178, 105696. [Google Scholar] [CrossRef]
- Research, E.V. Available online: https://www.electricvehiclesresearch.com/articles/13908/agricultural-robotics-and-drones-diversity-of-functions-forms (accessed on 25 February 2021).
- Tzounis, A.; Bartzanas, T.; Kittas, C.; Katsoulas, N.; Ferentinos, K. Spatially distributed greenhouse climate control based on wireless sensor network measurements. In Proceedings of the V International Symposium on Applications of Modelling as an Innovative Technology in the Horticultural Supply Chain-Model-IT 1154; ISHS Acta Horticulturae: Wageningen, The Netherlands, 2017; pp. 111–120. [Google Scholar]
- Keerthi, V.; Kodandaramaiah, G. Cloud IoT based greenhouse monitoring system. Int. J. Eng. Res. Appl. 2015, 5, 35–41. [Google Scholar]
- Tzounis, A.; Katsoulas, N.; Bartzanas, T.; Kittas, C. Internet of Things in agriculture, recent advances and future challenges. Biosyst. Eng. 2017, 164, 31–48. [Google Scholar] [CrossRef]
- Barsi, J.A.; Schott, J.R.; Hook, S.J.; Raqueno, N.G.; Markham, B.L.; Radocinski, R.G. Landsat-8 thermal infrared sensor (TIRS) vicarious radiometric calibration. Remote Sens. 2014, 6, 11607–11626. [Google Scholar] [CrossRef] [Green Version]
- Pino, E. Los drones una herramienta para una agricultura eficiente: Un futuro de alta tecnología. Idesia (Arica) 2019, 37, 75–84. [Google Scholar] [CrossRef] [Green Version]
- Oré, G.; Alcântara, M.S.; Góes, J.A.; Oliveira, L.P.; Yepes, J.; Teruel, B.; Castro, V.; Bins, L.S.; Castro, F.; Luebeck, D. Crop growth monitoring with drone-borne DInSAR. Remote Sens. 2020, 12, 615. [Google Scholar] [CrossRef] [Green Version]
- Panday, U.S.; Shrestha, N.; Maharjan, S.; Pratihast, A.K.; Shrestha, K.L.; Aryal, J. Correlating the plant height of wheat with above-ground biomass and crop yield using drone imagery and crop surface model, a case study from Nepal. Drones 2020, 4, 28. [Google Scholar] [CrossRef]
- DEVI, G.; Sowmiya, N.; Yasoda, K.; Muthulakshmi, K.; BALASUBRAMANIAN, K. Review on Application of Drones for Crop Health Monitoring and Spraying Pesticides and Fertilizer. J. Crit. Rev. 2020, 7, 667–672. [Google Scholar]
- Rani, A.; Chaudhary, A.; Sinha, N.; Mohanty, M.; Chaudhary, R. Drone: The green technology for future agriculture. Har. Dhara 2019, 2, 3–6. [Google Scholar]
- Santos, L.M.d.; Barbosa, B.D.S.; Andrade, A.D. Use of remotely piloted aircraft in precision agriculture: A review. Dyna 2019, 86, 284–291. [Google Scholar]
- Stehr, N.J. Drones: The newest technology for precision agriculture. Nat. Sci. Educ. 2015, 44, 89–91. [Google Scholar] [CrossRef]
- Psirofonia, P.; Samaritakis, V.; Eliopoulos, P.; Potamitis, I. Use of unmanned aerial vehicles for agricultural applications with emphasis on crop protection: Three novel case-studies. Int. J. Agric. Sci. Technol. 2017, 5, 30–39. [Google Scholar] [CrossRef]
- Ren, Q.; Zhang, R.; Cai, W.; Sun, X.; Cao, L. Application and Development of New Drones in Agriculture. In Proceedings of IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2020; p. 052041. [Google Scholar]
- Wang, W.; Paschalidis, K.; Feng, J.-C.; Song, J.; Liu, J.-H. Polyamine catabolism in plants: A universal process with diverse functions. Front. Plant Sci. 2019, 10, 561. [Google Scholar] [CrossRef] [Green Version]
- Iost Filho, F.H.; Heldens, W.B.; Kong, Z.; de Lange, E.S. Drones: Innovative technology for use in precision pest management. J. Econ. Entomol. 2020, 113, 1–25. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Daponte, P.; De Vito, L.; Glielmo, L.; Iannelli, L.; Liuzza, D.; Picariello, F.; Silano, G. A review on the use of drones for precision agriculture. In Proceedings of IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2020; p. 012022. [Google Scholar]
- Natu, A.S.; Kulkarni, S. Adoption and utilization of drones for advanced precision farming: A review. Int. J. Recent Innov. Trends Comput. Commun. 2016, 4, 563–565. [Google Scholar]
- Gómez-Candón, D.; Virlet, N.; Labbé, S.; Jolivot, A.; Regnard, J.-L. Field phenotyping of water stress at tree scale by UAV-sensed imagery: New insights for thermal acquisition and calibration. Precis. Agric. 2016, 17, 786–800. [Google Scholar] [CrossRef]
- Knipper, K.R.; Kustas, W.P.; Anderson, M.C.; Alfieri, J.G.; Prueger, J.H.; Hain, C.R.; Gao, F.; Yang, Y.; McKee, L.G.; Nieto, H. Evapotranspiration estimates derived using thermal-based satellite remote sensing and data fusion for irrigation management in California vineyards. Irrig. Sci. 2019, 37, 431–449. [Google Scholar] [CrossRef]
- Song, X.-P.; Liang, Y.-J.; Zhang, X.-Q.; Qin, Z.-Q.; Wei, J.-J.; Li, Y.-R.; Wu, J.-M. Intrusion of fall armyworm (Spodoptera frugiperda) in sugarcane and its control by drone in China. Sugar Tech 2020, 22, 734–737. [Google Scholar] [CrossRef]
- Shaw, K.K.; Vimalkumar, R. Design and development of a drone for spraying pesticides, fertilizers and disinfectants. Eng. Res. Technol. (IJERT) 2020, 9, 1181–1185. [Google Scholar]
- Tripicchio, P.; Satler, M.; Dabisias, G.; Ruffaldi, E.; Avizzano, C.A. Towards smart farming and sustainable agriculture with drones. In Proceedings of the 2015 International Conference on Intelligent Environments, Prague, Czech Republic, 15–17 July 2015; pp. 140–143. [Google Scholar]
- Negash, L.; Kim, H.-Y.; Choi, H.-L. Emerging UAV applications in agriculture. In Proceedings of the 2019 7th International Conference on Robot Intelligence Technology and Applications (RiTA), Daejeon, Korea, 1–3 November 2019; pp. 254–257. [Google Scholar]
- Herrmann, I.; Bdolach, E.; Montekyo, Y.; Rachmilevitch, S.; Townsend, P.A.; Karnieli, A. Assessment of maize yield and phenology by drone-mounted superspectral camera. Precis. Agric. 2020, 21, 51–76. [Google Scholar] [CrossRef]
- Vroegindeweij, B.A.; van Wijk, S.W.; van Henten, E. Autonomous unmanned aerial vehicles for agricultural applications. In Proceedings of the AgEng 2014, Lausanne, Switzerland, 6–10 July 2014. [Google Scholar]
- Gauvreau, P.R., Jr. Unmanned Aerial Vehicle for Augmenting Plant Pollination. U.S. Patent Application No 16/495,818, 23 January 2020. [Google Scholar]
- Sun, Y.; Yi, S.; Hou, F.; Luo, D.; Hu, J.; Zhou, Z. Quantifying the dynamics of livestock distribution by unmanned aerial vehicles (UAVs): A case study of yak grazing at the household scale. Rangel. Ecol. Manag. 2020, 73, 642–648. [Google Scholar] [CrossRef]
- Banu, T.P.; Borlea, G.F.; Banu, C. The use of drones in forestry. J. Environ. Sci. Eng. B 2016, 5, 557–562. [Google Scholar]
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- D’Odorico, P.; Besik, A.; Wong, C.Y.; Isabel, N.; Ensminger, I. High-throughput drone-based remote sensing reliably tracks phenology in thousands of conifer seedlings. New Phytol. 2020, 226, 1667–1681. [Google Scholar] [CrossRef]
- Tu, Y.-H.; Phinn, S.; Johansen, K.; Robson, A.; Wu, D. Optimising drone flight planning for measuring horticultural tree crop structure. New Phytol. 2020, 160, 83–96. [Google Scholar] [CrossRef] [Green Version]
- Sudhakar, S.; Vijayakumar, V.; Kumar, C.S.; Priya, V.; Ravi, L.; Subramaniyaswamy, V. Unmanned Aerial Vehicle (UAV) based Forest Fire Detection and monitoring for reducing false alarms in forest-fires. Comput. Commun. 2020, 149, 1–16. [Google Scholar] [CrossRef]
- Vayssade, J.-A.; Arquet, R.; Bonneau, M. Automatic activity tracking of goats using drone camera. Comput. Electron. Agric. 2019, 162, 767–772. [Google Scholar] [CrossRef]
- Wang, D.; Song, Q.; Liao, X.; Ye, H.; Shao, Q.; Fan, J.; Cong, N.; Xin, X.; Yue, H.; Zhang, H. Integrating satellite and unmanned aircraft system (UAS) imagery to model livestock population dynamics in the Longbao Wetland National Nature Reserve, China. Sci. Total Environ. 2020, 746, 140327. [Google Scholar] [CrossRef]
- Cerro, J.d.; Cruz Ulloa, C.; Barrientos, A.; de León Rivas, J. Unmanned Aerial Vehicles in Agriculture: A Survey. Agronomy 2021, 11, 203. [Google Scholar] [CrossRef]
- A Global Directory of Drone Laws and Regulations. Available online: https://uavcoach.com/drone-laws/ (accessed on 14 February 2021).
- Singh, B.; Singh, N.; Kaushish, A.; Gupta, N. Optimizing IOT Drones using Cellular Networks. In Proceedings of the 2020 12th International Conference on Computational Intelligence and Communication Networks (CICN), Bhimtal, India, 25–26 September 2020; pp. 192–197. [Google Scholar]
- Prasanna, M.S.; Jebapriya, M.J. IoT based agriculture monitoring and smart farming using drones. Mukt Shabd J. 2020, IX, 525–534. [Google Scholar]
- García, L.; Parra, L.; Jimenez, J.M.; Lloret, J.; Mauri, P.V.; Lorenz, P. DronAway: A Proposal on the Use of Remote Sensing Drones as Mobile Gateway for WSN in Precision Agriculture. Appl. Sci. 2020, 10, 6668. [Google Scholar] [CrossRef]
- Chinnaiyan, R.; Balachandar, S. Reliable administration framework of drones and IoT sensors in agriculture farmstead using blockchain and smart contracts. In Proceedings of the Proceedings of the 2020 2nd International Conference on Big Data Engineering and Technology, Singapore, 3–5 January 2020; pp. 106–111. [Google Scholar]
- Singh, K.K.; Frazier, A.E. A meta-analysis and review of unmanned aircraft system (UAS) imagery for terrestrial applications. Int. J. Remote Sens. 2018, 39, 5078–5098. [Google Scholar] [CrossRef]
- Halevy, A.; Norvig, P.; Pereira, F. The unreasonable effectiveness of data. IEEE Intell. Syst. 2009, 24, 8–12. [Google Scholar] [CrossRef]
- Lelièvre, J.M.; Latchè, A.; Jones, B.; Bouzayen, M.; Pech, J.C. Ethylene and fruit ripening. Physiol. Plant. 1997, 101, 727–739. [Google Scholar] [CrossRef]
- Duveiller, G.; Cescatti, A. Spatially downscaling sun-induced chlorophyll fluorescence leads to an improved temporal correlation with gross primary productivity. Remote Sens. Environ. 2016, 182, 72–89. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- GRANIOT. Available online: https://graniot.com/ (accessed on 11 February 2021).
- Ampatzidis, Y.; De Bellis, L.; Luvisi, A. iPathology: Robotic applications and management of plants and plant diseases. Sustainability 2017, 9, 1010. [Google Scholar] [CrossRef] [Green Version]
- Bueno-Delgado, M.V.; Molina-Martínez, J.M.; Correoso-Campillo, R.; Pavón-Mariño, P. Ecofert: An Android application for the optimization of fertilizer cost in fertigation. Comput. Electron. Agric. 2016, 121, 32–42. [Google Scholar] [CrossRef]
- Miyoshi, T.; Ibaraki, Y.; Sago, Y. Development of an android-tablet-based system for analyzing light intensity distribution on a plant canopy surface. Comput. Electron. Agric. 2016, 122, 211–217. [Google Scholar] [CrossRef]
Figure 1.
An illustration of industrial revolutions, with respect to agriculture, over time. Representative events/technologies are mentioned in each respective technological era, although they are not limited to only these.
Figure 1.
An illustration of industrial revolutions, with respect to agriculture, over time. Representative events/technologies are mentioned in each respective technological era, although they are not limited to only these.

Figure 2.
A stepwise illustration (1 to 7) of processing and downloading satellite imagery products from Google Earth Engine (GEE).
Figure 2.
A stepwise illustration (1 to 7) of processing and downloading satellite imagery products from Google Earth Engine (GEE).

Figure 3.
Sentinel-2 images accessed through Google Earth Engine (GEE). (A) Area of interest, (B) RGB field composition, (C) NDVI raster tile, (D) NDVI vector tile, (E) RGB field composition, (F) NDVI raster tile (Images facilitated by Graniot).
Figure 3.
Sentinel-2 images accessed through Google Earth Engine (GEE). (A) Area of interest, (B) RGB field composition, (C) NDVI raster tile, (D) NDVI vector tile, (E) RGB field composition, (F) NDVI raster tile (Images facilitated by Graniot).

Figure 4.
Sentinel-2 images accessed through Google Earth Engine (GEE). (A) Area of interest, (B) RGB field composition, (C) NDVI raster tile, (D) RGB field composition, (E) NDVI raster tile, (F) NDVI vector tile (Images facilitated by Graniot).
Figure 4.
Sentinel-2 images accessed through Google Earth Engine (GEE). (A) Area of interest, (B) RGB field composition, (C) NDVI raster tile, (D) RGB field composition, (E) NDVI raster tile, (F) NDVI vector tile (Images facilitated by Graniot).

Figure 5.
A schematic diagram of RPA application in agriculture.

Figure 6.
Vegetation index (VIs) maps generated through Parrot Sequoia (a multispectral camera) and Yuneec CGOET (a thermal sensor) mounted on Yuneec Typhoon H hexacopter RPA. (A) Crop area studied. (B) Map of “chlorophyll a” content based on NDRE. (C) Map for vegetation status generated based on NDVI. (D) Thermal map established using Yuneec CGOET. (Images facilitated by MCBiodrone).
Figure 6.
Vegetation index (VIs) maps generated through Parrot Sequoia (a multispectral camera) and Yuneec CGOET (a thermal sensor) mounted on Yuneec Typhoon H hexacopter RPA. (A) Crop area studied. (B) Map of “chlorophyll a” content based on NDRE. (C) Map for vegetation status generated based on NDVI. (D) Thermal map established using Yuneec CGOET. (Images facilitated by MCBiodrone).

Figure 7.
A set of field zones recommended for treatment based on the vegetation indices (VIs) maps, generated using a parrot sequoia and Yuneec CGOET mounted on a Yuneec Typhoon H hexacopter RPA for olive crops (image facilitated by MCBiodrone).
Figure 7.
A set of field zones recommended for treatment based on the vegetation indices (VIs) maps, generated using a parrot sequoia and Yuneec CGOET mounted on a Yuneec Typhoon H hexacopter RPA for olive crops (image facilitated by MCBiodrone).

Figure 8.
Future considerations of remote sensing (RS) technology applied to agriculture.

Figure 9.
An anticipated model of remote sensing (RS) technologies applied to agriculture in the 5th industrial revolution. The figure can be read from left to right, where (A) represents the user control center, (B) represent servers, cloud and the related storage accessories, (C) represents the real players, e.g., satellites, remotely piloted aircrafts (RPAs), autonomous robots, metrological stations, etc., for data acquisition, (D) represent data processing using machine learning and related platforms that ultimately produce infographics and other useful information in (E).
Figure 9.
An anticipated model of remote sensing (RS) technologies applied to agriculture in the 5th industrial revolution. The figure can be read from left to right, where (A) represents the user control center, (B) represent servers, cloud and the related storage accessories, (C) represents the real players, e.g., satellites, remotely piloted aircrafts (RPAs), autonomous robots, metrological stations, etc., for data acquisition, (D) represent data processing using machine learning and related platforms that ultimately produce infographics and other useful information in (E).


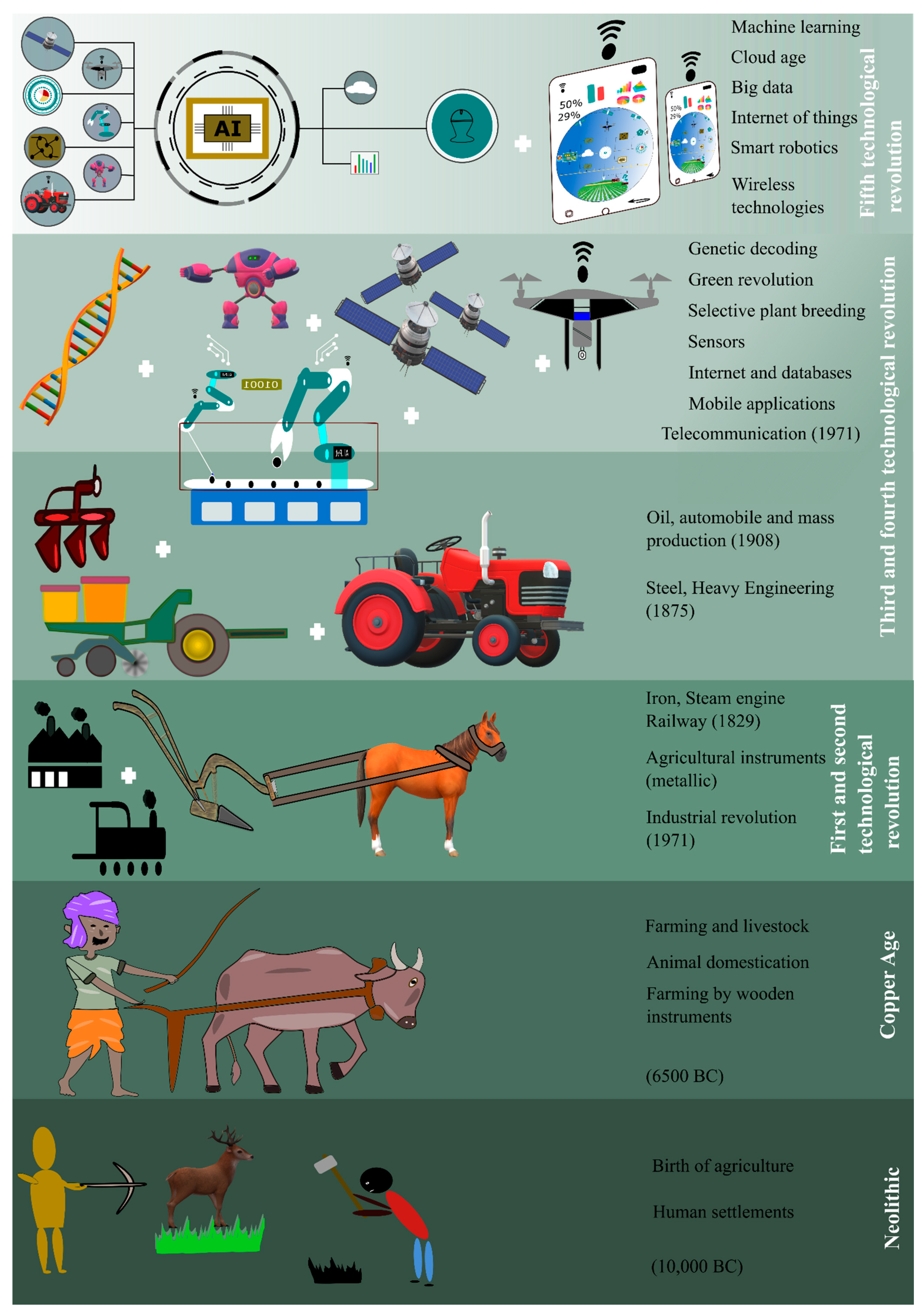{kind=link}
{kind=link}
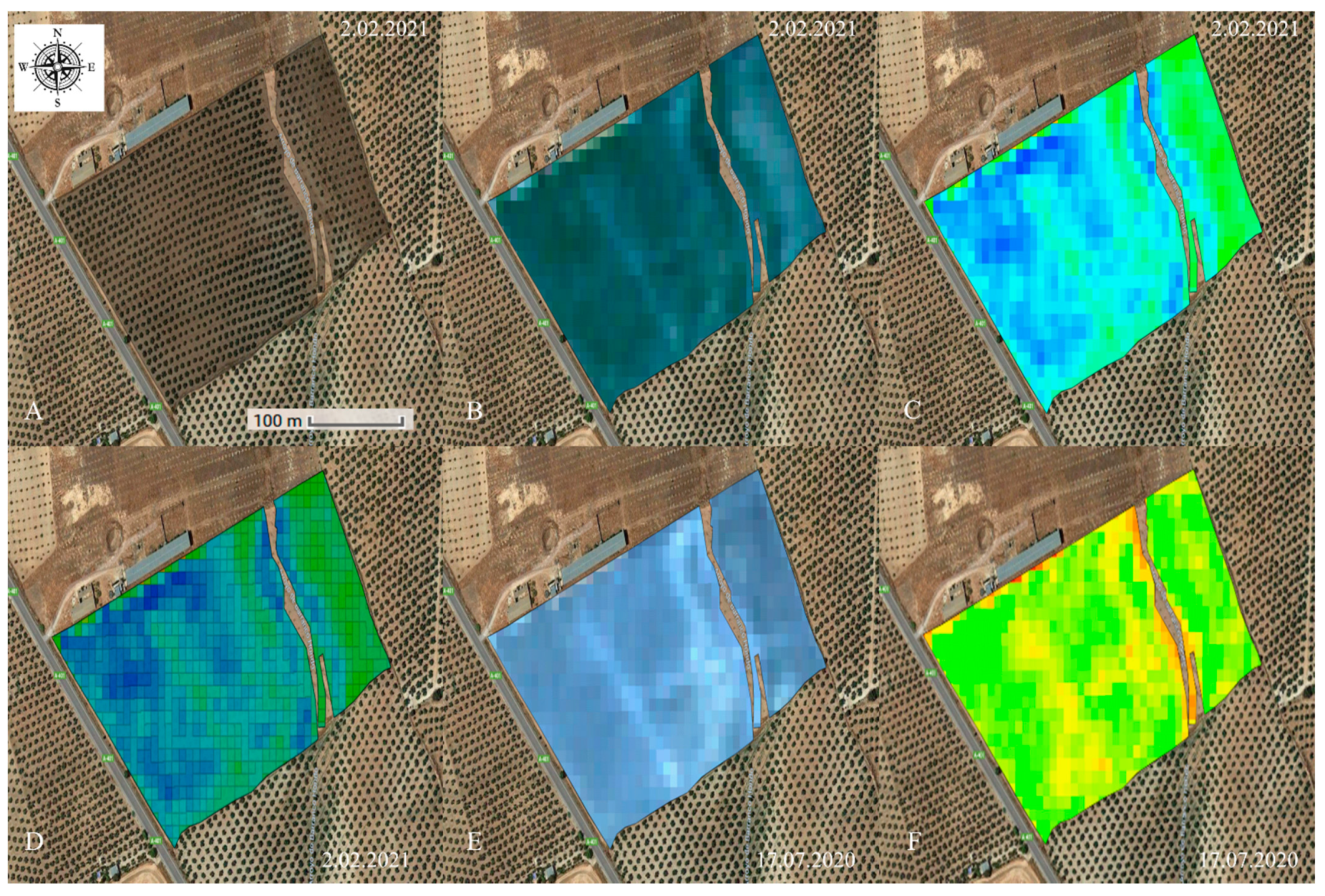{kind=link}
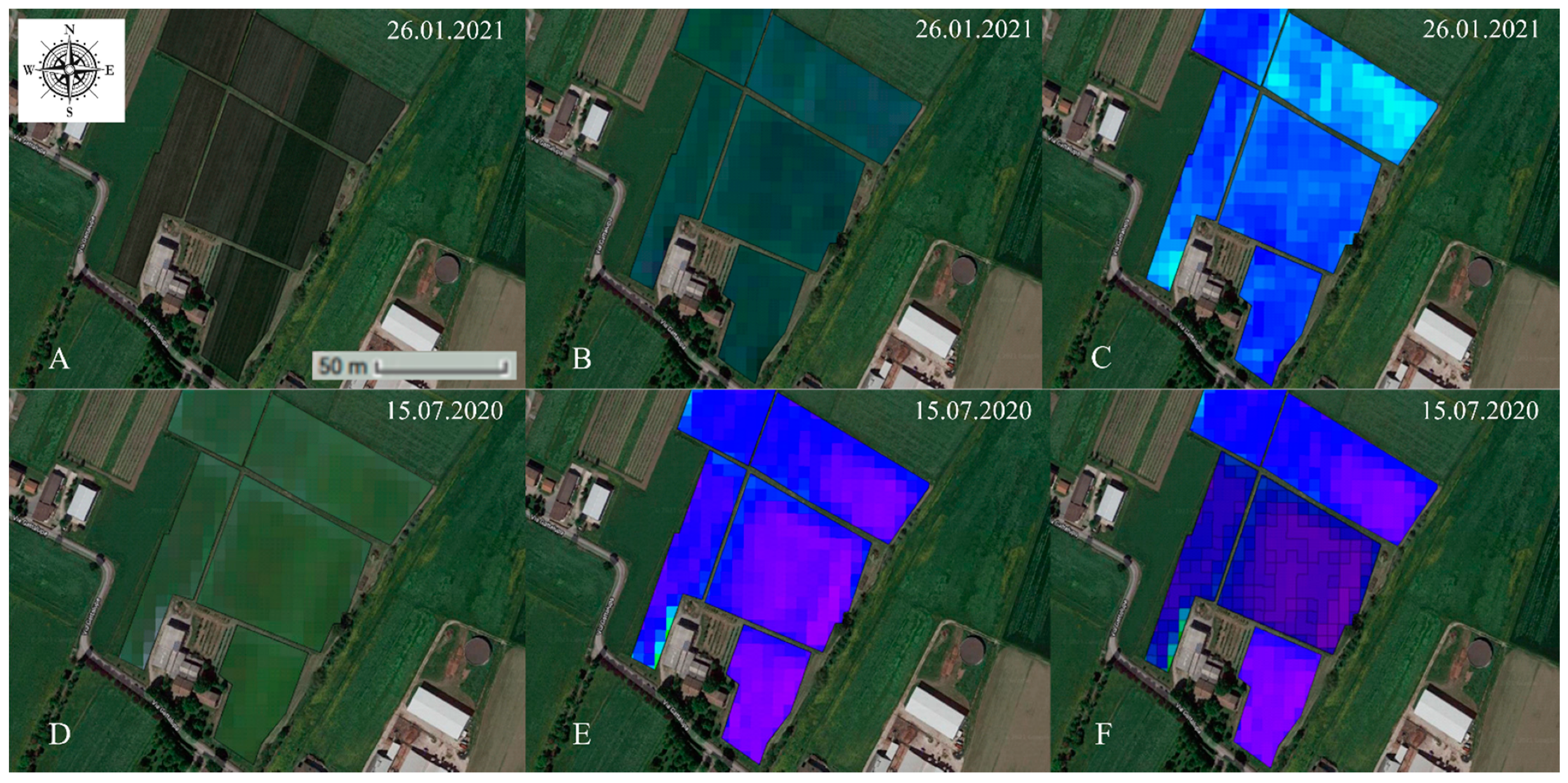{kind=link}
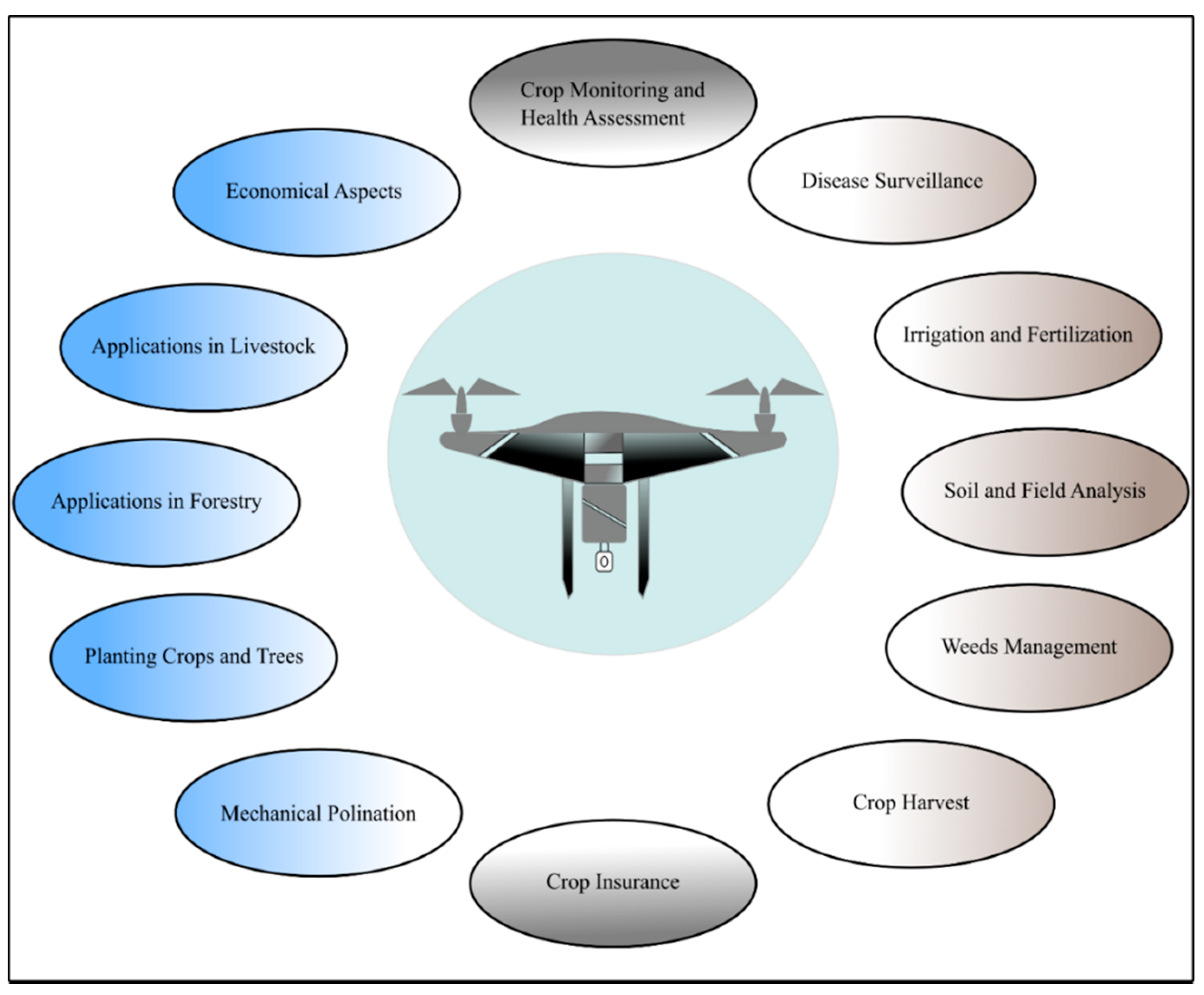{kind=link}
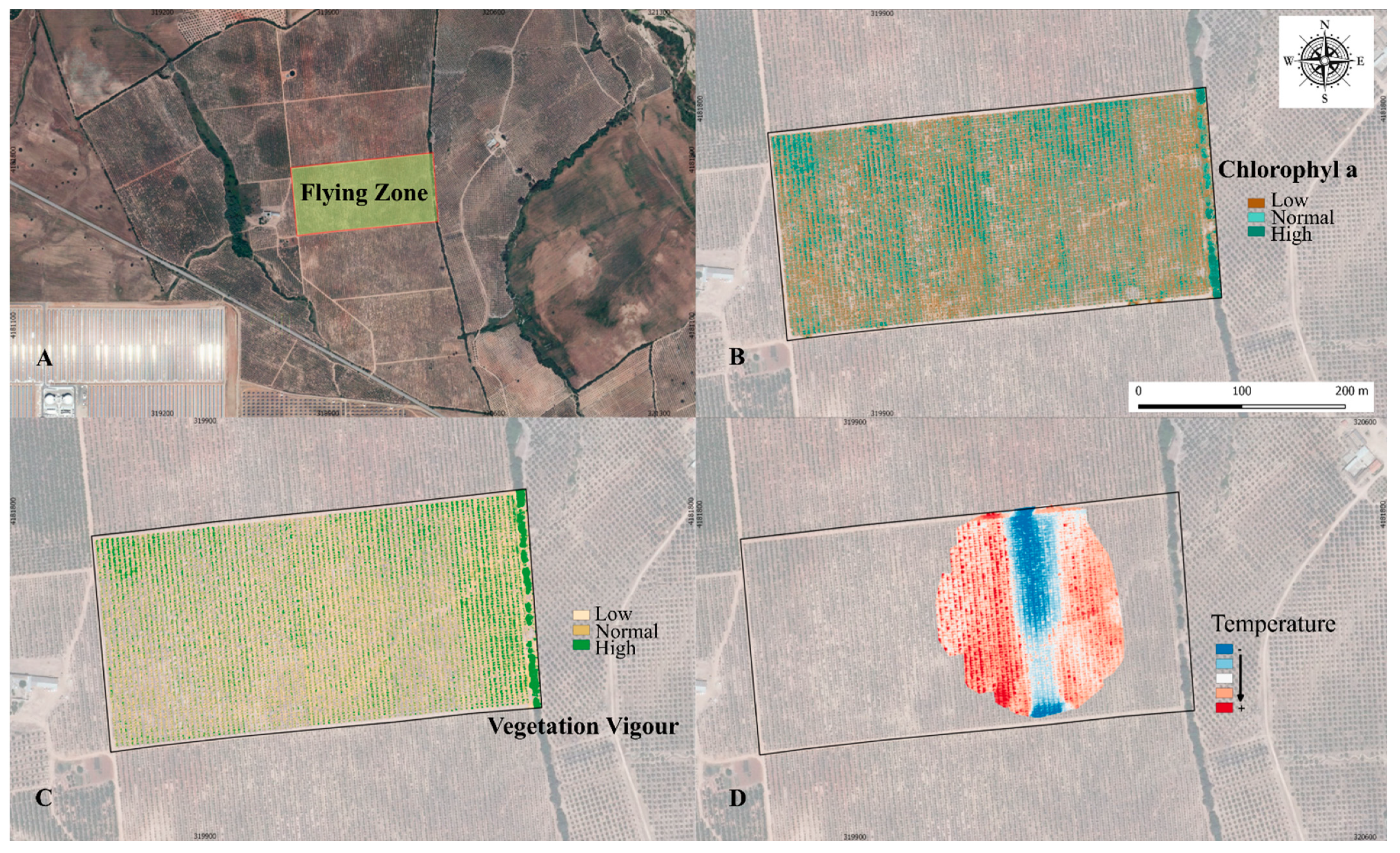{kind=link}
{kind=link}
{kind=link}
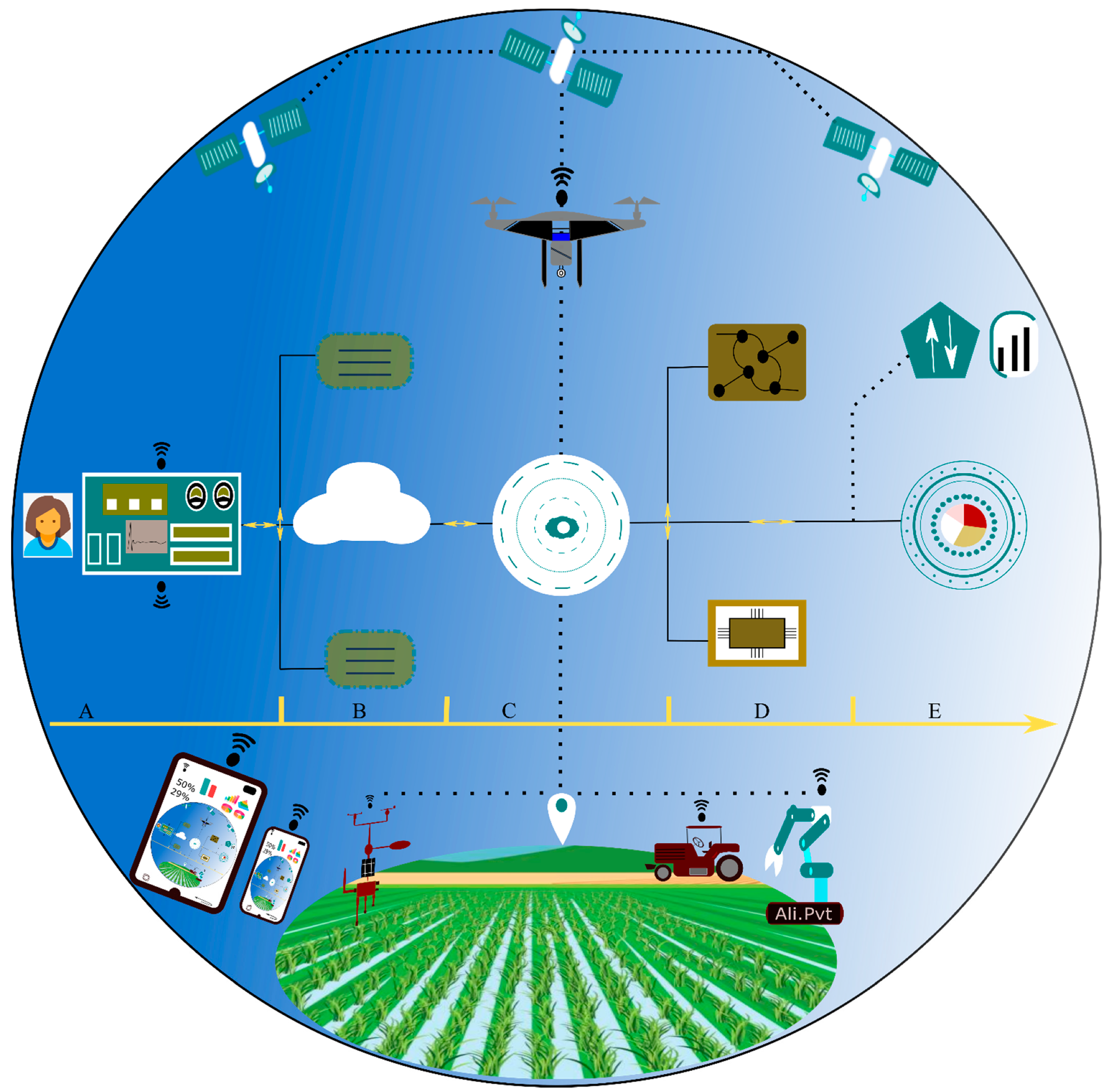{kind=link}
Table 1.
Principal categories of remote sensing (RS) sensors with their respective functions in agricultural studies.
Table 1.
Principal categories of remote sensing (RS) sensors with their respective functions in agricultural studies.
| Sensor | Purpose | Ref. |
|---|---|---|
| Synthetic aperture radar (SAR) | Crop classification, crop growth monitoring, and soil moisture monitoring. | [84] |
| Visible RGB (VIS) | Vegetation classification and estimation of geometric attributes. | [42] |
| Multispectral and hyperspectral | Physiological and biochemical attributes (leaf area index, crop water content, leaf/canopy chlorophyll content, and nitrogen content). | [85] |
| Fluorescence spectroscopy and imaging sensors | Chlorophyll and nitrogen content, nitrogen-to-carbon ratio, and leaf area index. | [86] |
| Laser/light detection and ranging (LiDAR) | Horizontal and vertical structural characteristics of plants. | [87] |
| Near-infrared (NIR) | Crop health, water. Management, soil moisture analysis, plant counting, and erosion analysis. | [7] |
Table 2.
A summary of a few representative studies for principal agricultural applications of RPAs. (The purpose of citing these references is impartial and is not confined to these studies only).
Table 2.
A summary of a few representative studies for principal agricultural applications of RPAs. (The purpose of citing these references is impartial and is not confined to these studies only).
| RPA Application Area | Reference |
|---|---|
| Crop growth and monitoring | [7,108,109,110,111] |
| Crop scouting | [7,112] |
| Disease detection | [113,114,115,116] |
| Bird pest surveillance | [117,118] |
| Irrigation and fertilization | [111,112,115,116,119,120,121,122,123,124] |
| Soil and field analysis | [7,108,112,125] |
| Weeds management | [112,116,120,126] |
| Crop harvest | [112,127,128] |
| Crop insurance | [112,114,116] |
| Mechanical pollination | [7,116,129,130] |
| Forestry | [131,132,133,134,135] |
| Livestock | [112,114,116,120,130,136,137] |
Table 3.
Three categories established by European Union Aviation Safety Agency (EASA) for operating RPAs.
Table 3.
Three categories established by European Union Aviation Safety Agency (EASA) for operating RPAs.
| Sr. | Category | Description |
|---|---|---|
| 1 | Open | Not requiring any prior operational declaration or authorization. |
| 2 | Specified | Requiring an authorization by the competent authority except for standard scenarios. |
| 3 | Certified | Requiring certification by the competent authority. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Martos, V.; Ahmad, A.; Cartujo, P.; Ordoñez, J. Ensuring Agricultural Sustainability through Remote Sensing in the Era of Agriculture 5.0. Appl. Sci. 2021, 11, 5911. https://0-doi-org.brum.beds.ac.uk/10.3390/app11135911
AMA Style
Martos V, Ahmad A, Cartujo P, Ordoñez J. Ensuring Agricultural Sustainability through Remote Sensing in the Era of Agriculture 5.0. Applied Sciences. 2021; 11(13):5911. https://0-doi-org.brum.beds.ac.uk/10.3390/app11135911
Chicago/Turabian StyleMartos, Vanesa, Ali Ahmad, Pedro Cartujo, and Javier Ordoñez. 2021. "Ensuring Agricultural Sustainability through Remote Sensing in the Era of Agriculture 5.0" Applied Sciences 11, no. 13: 5911. https://0-doi-org.brum.beds.ac.uk/10.3390/app11135911
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.