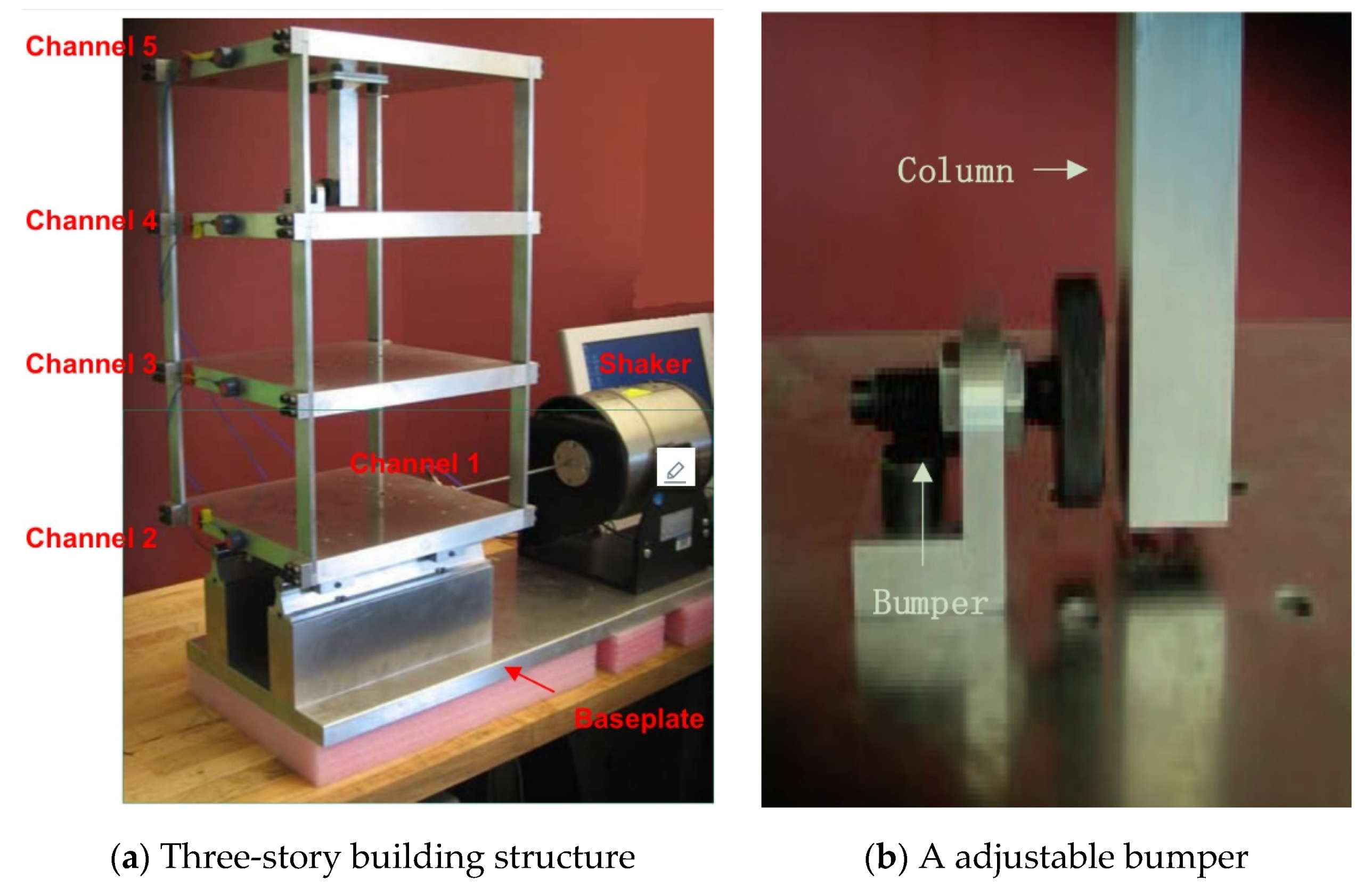
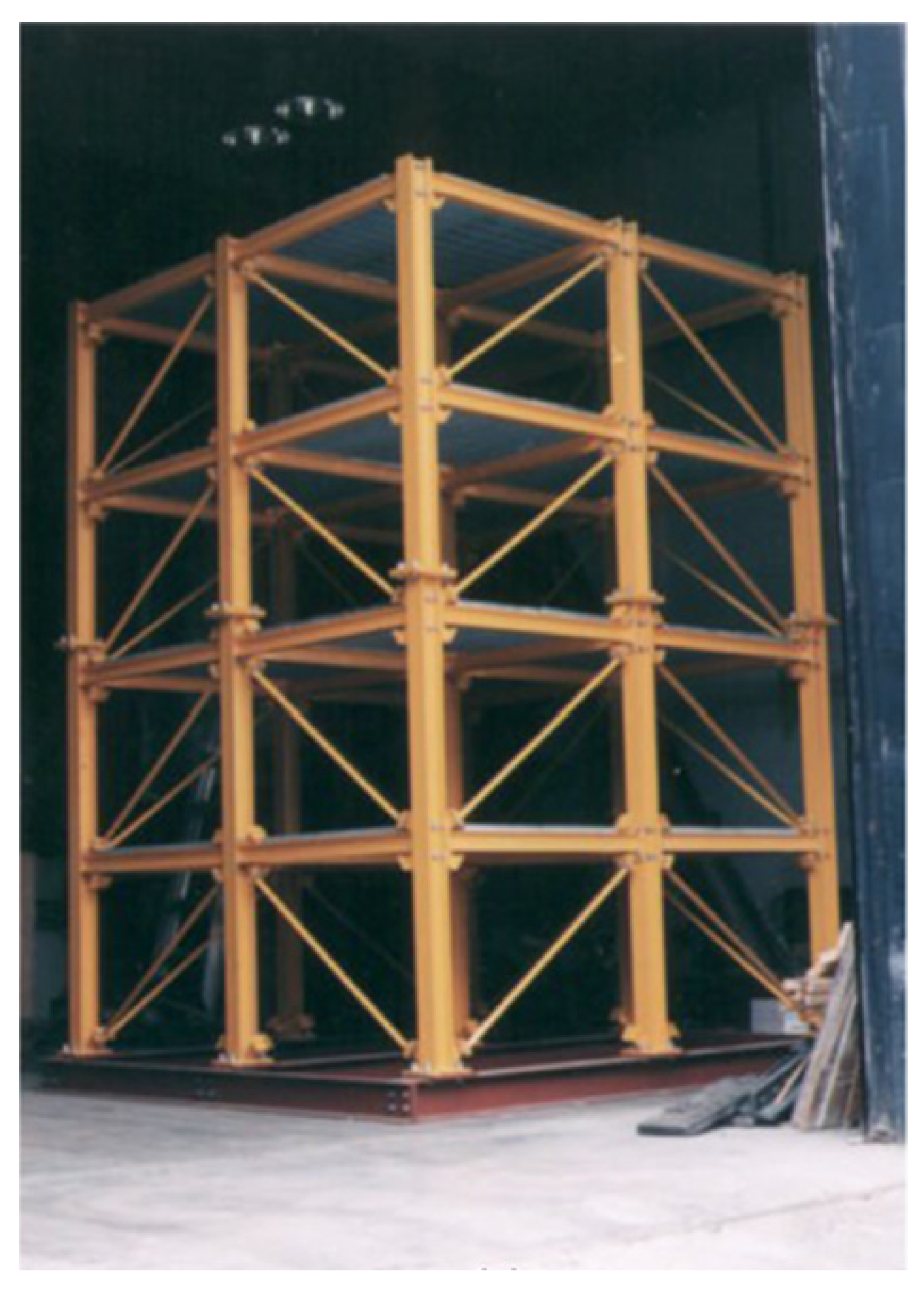
The section uses a three-story building to evaluate the effectiveness of the proposed method.
5.1. Experimental Setup and Data Description
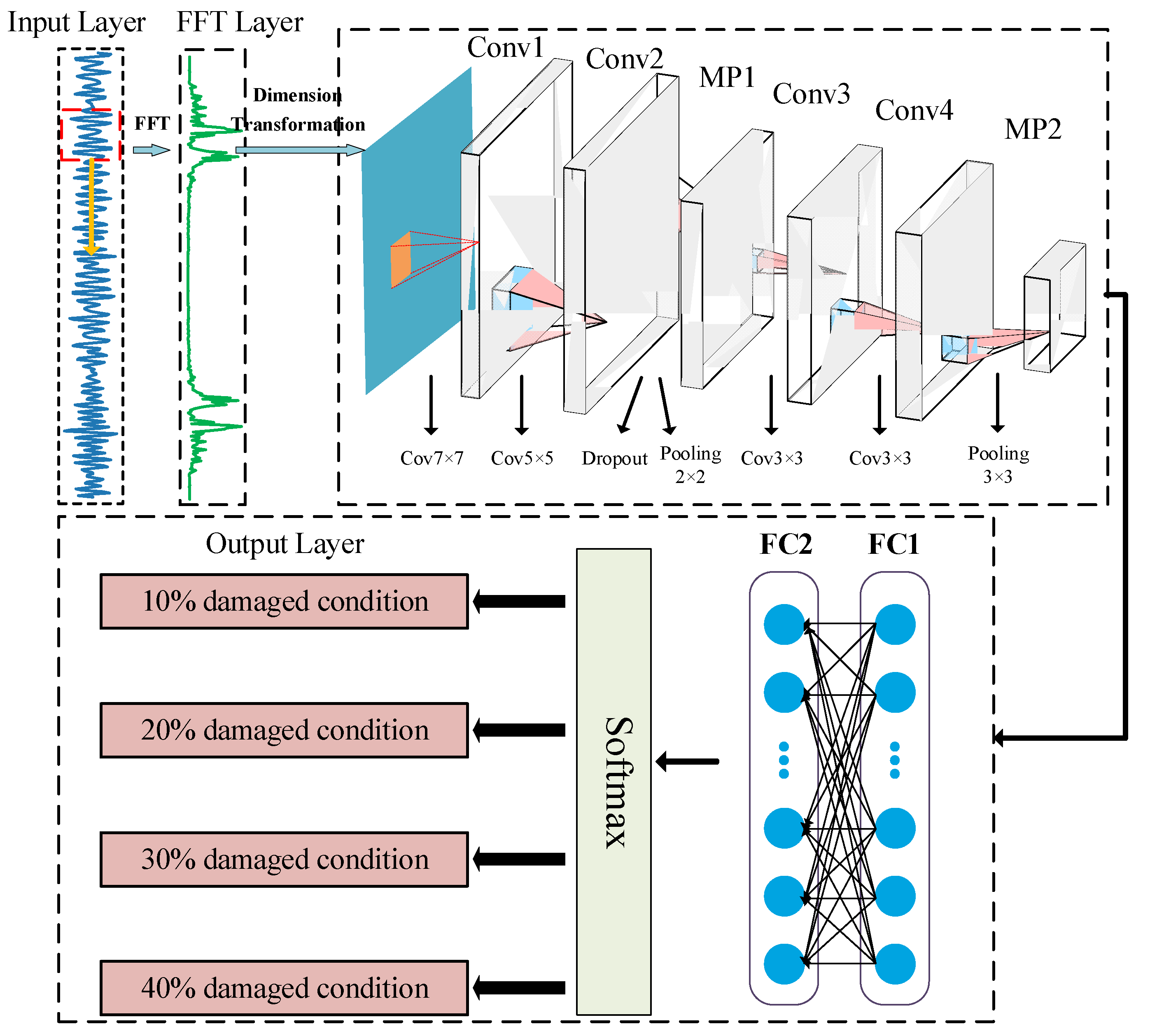
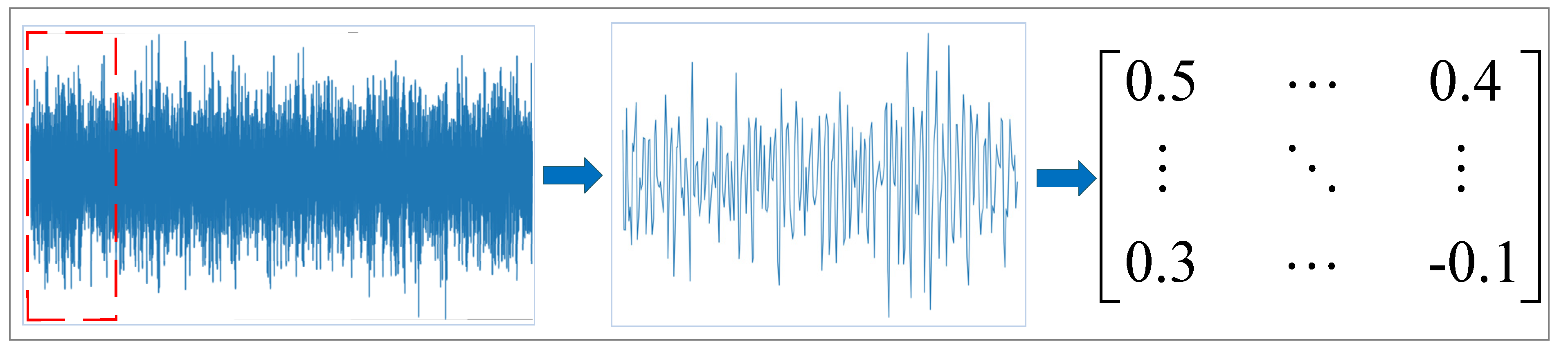
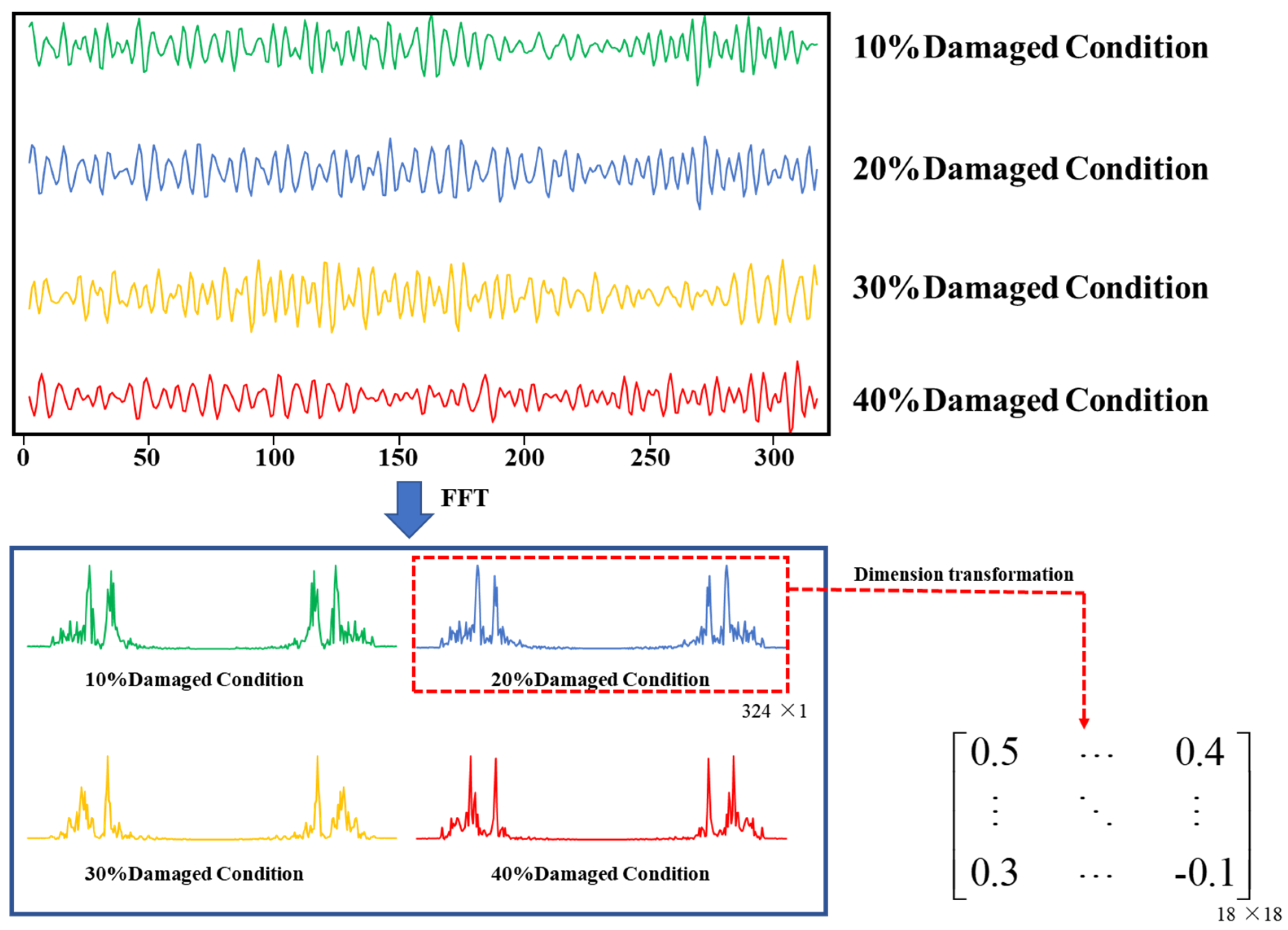
Because the sliding window length is set to 324, every one-dimensional vibration signal with 324 sampling length is obtained. The vibration signal are transformed into frequency information with 324 × 1 via FFT method. Then, frequency information is converted to
features matrix via shape dimension transformation, considering that DCNN is adopted at extracting spatial features. Finally, DCNN extracts damaged features from
matrix to identity structural damage.
Figure 6 shows the process of features transformation of four different damage condition, including that damaged degree is 10%, damaged degree is 20%, damaged degree is 30%, and damaged degree is 40%. The frequency information of different damage conditions is different with increasing damage degree.
Table 3 shows the configuration of the proposed method. The size of the convolutional kernel is 7 × 7 in the first layer, and the size of the convolutional kernel is 5 × 5 in the second. The maximum pooling layer is 2 × 2 in the third layer, the size of the convolutional kernel in the fourth layer is 3 × 3 in the fifth layer, and the size of the convolutional kernel is 3 × 3 in the sixth layer, and the maximum pooling layer is 2 × 2 in the seventh layer.
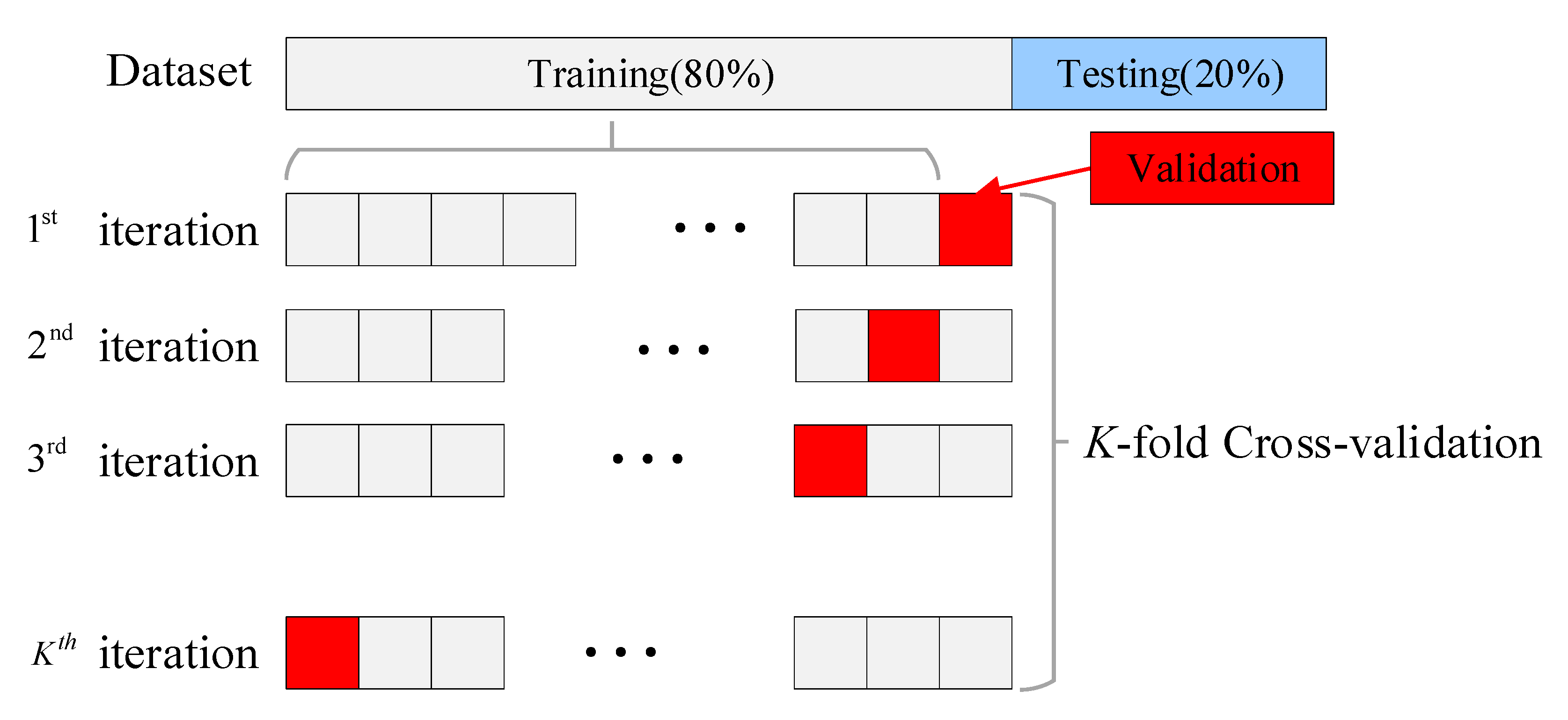
Table 4 shows the four-fold crossvalidation result on three three-story building structures using the proposed method. In the four-fold crossvalidation, the accuracy of training datasets is 93.48% on average, and the accuracy of testing datasets is 93.29% on average. It shows that FFT-DCNN is suitable for identifying structural damage degree effectively.
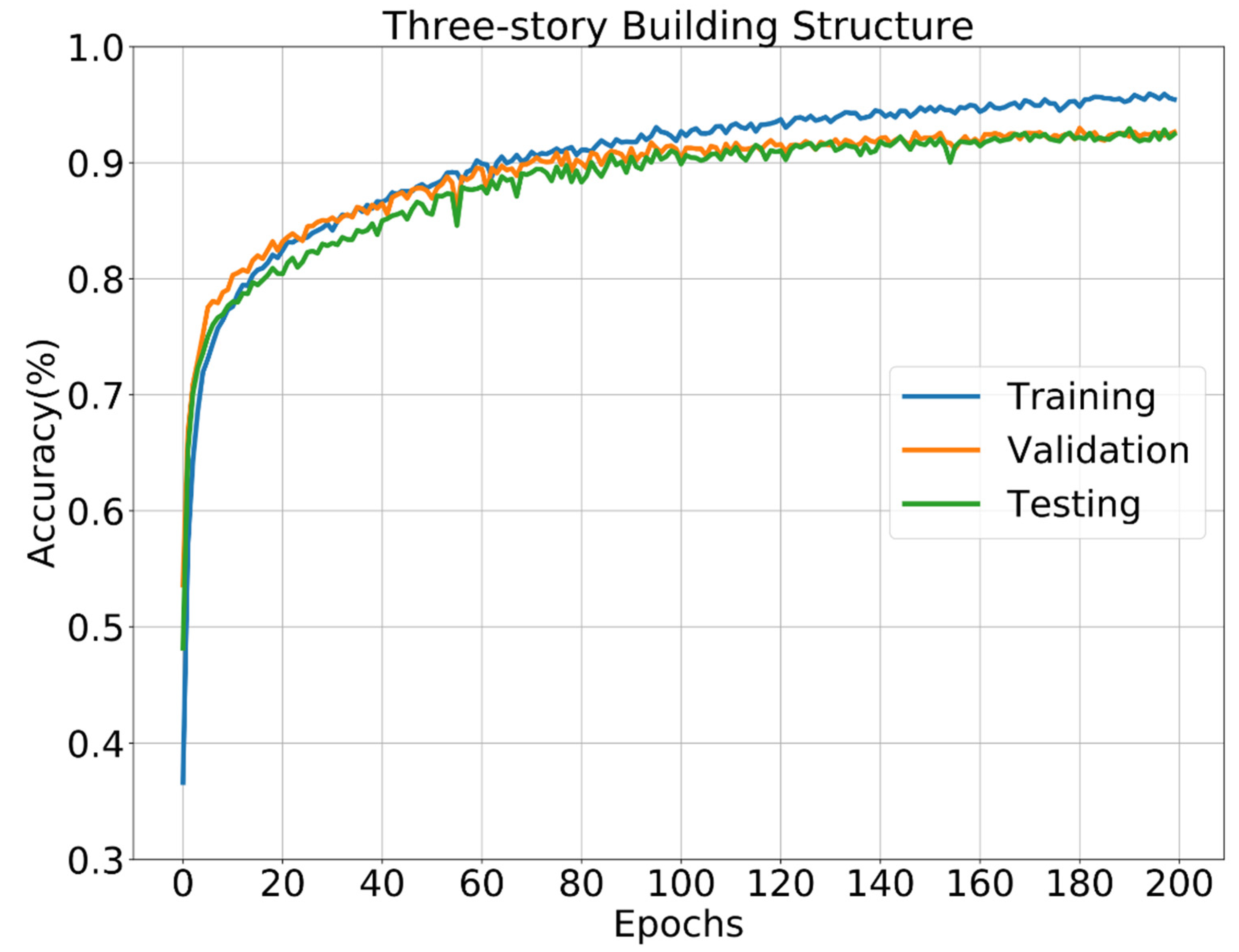
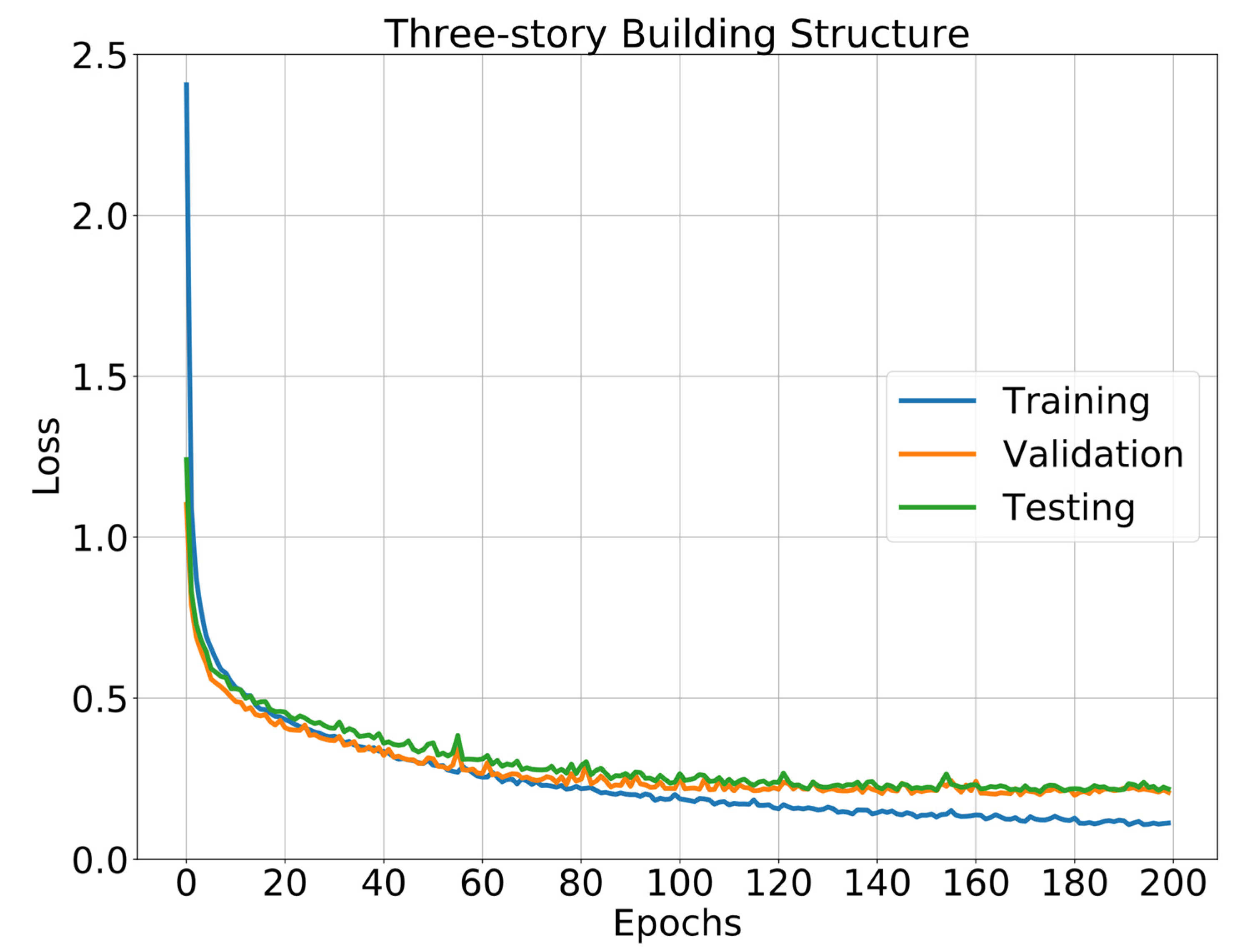
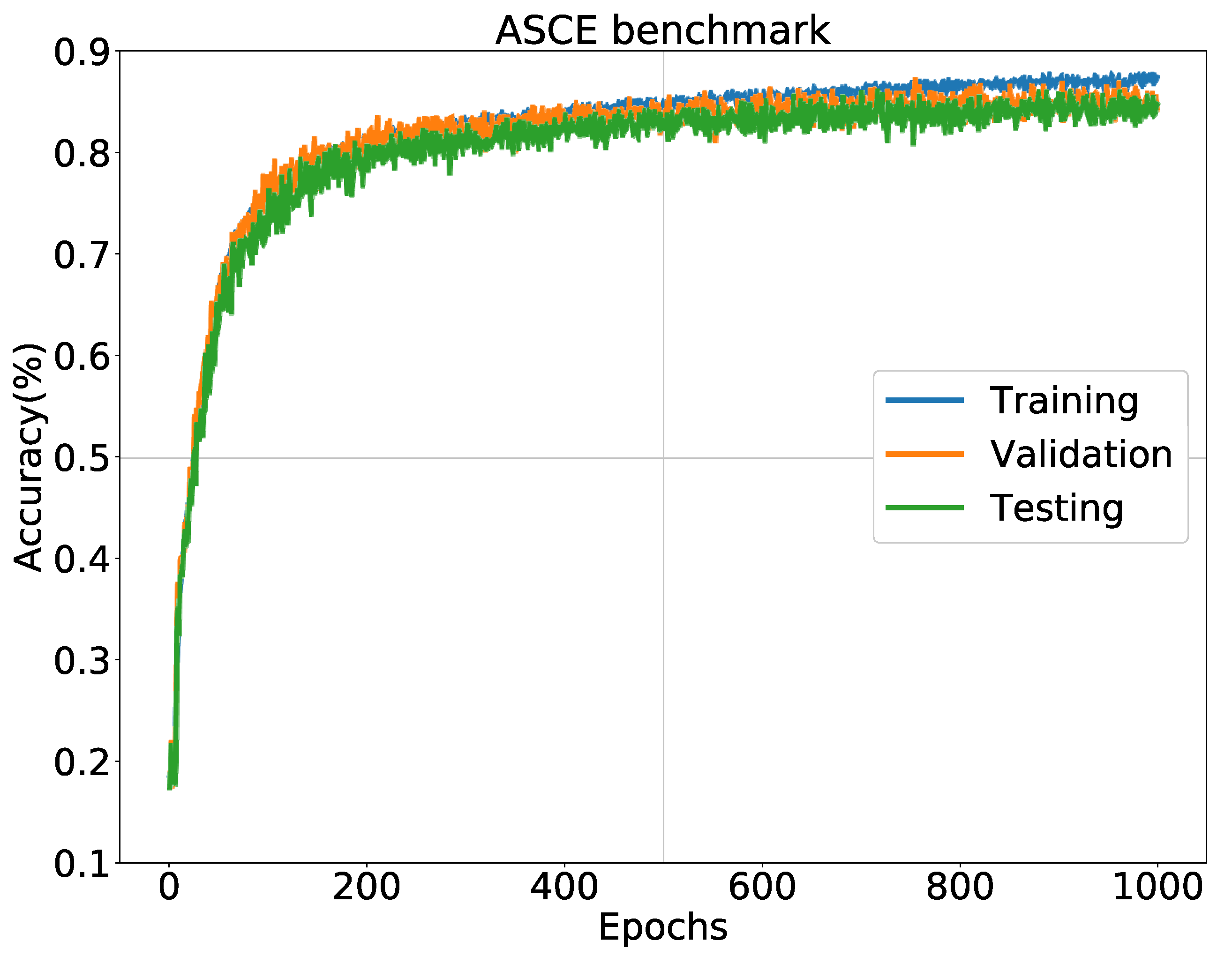
Figure 7 shows the accuracy curve for the proposed methods on Fold-1 datasets. The accuracy of training, testing, and validation reach 0.9 after achieving 200 epochs. The results show that FFT-DCNN presents an excellent ability of features extraction on the three-story building structure. In
Figure 8, the loss curve of the FFT-DCNN model is smooth, which shows an excellent fitting ability and training process.
5.2. Compared with Other Methods
To verify the advantages of our proposed method, classical ML algorithms including support vector machine (SVM) [
34], FFT-SVM, random forest (RF) [
35], K-nearest neighbor (KNN) [
36], and eXtreme gradient boosting (XGBoost) [
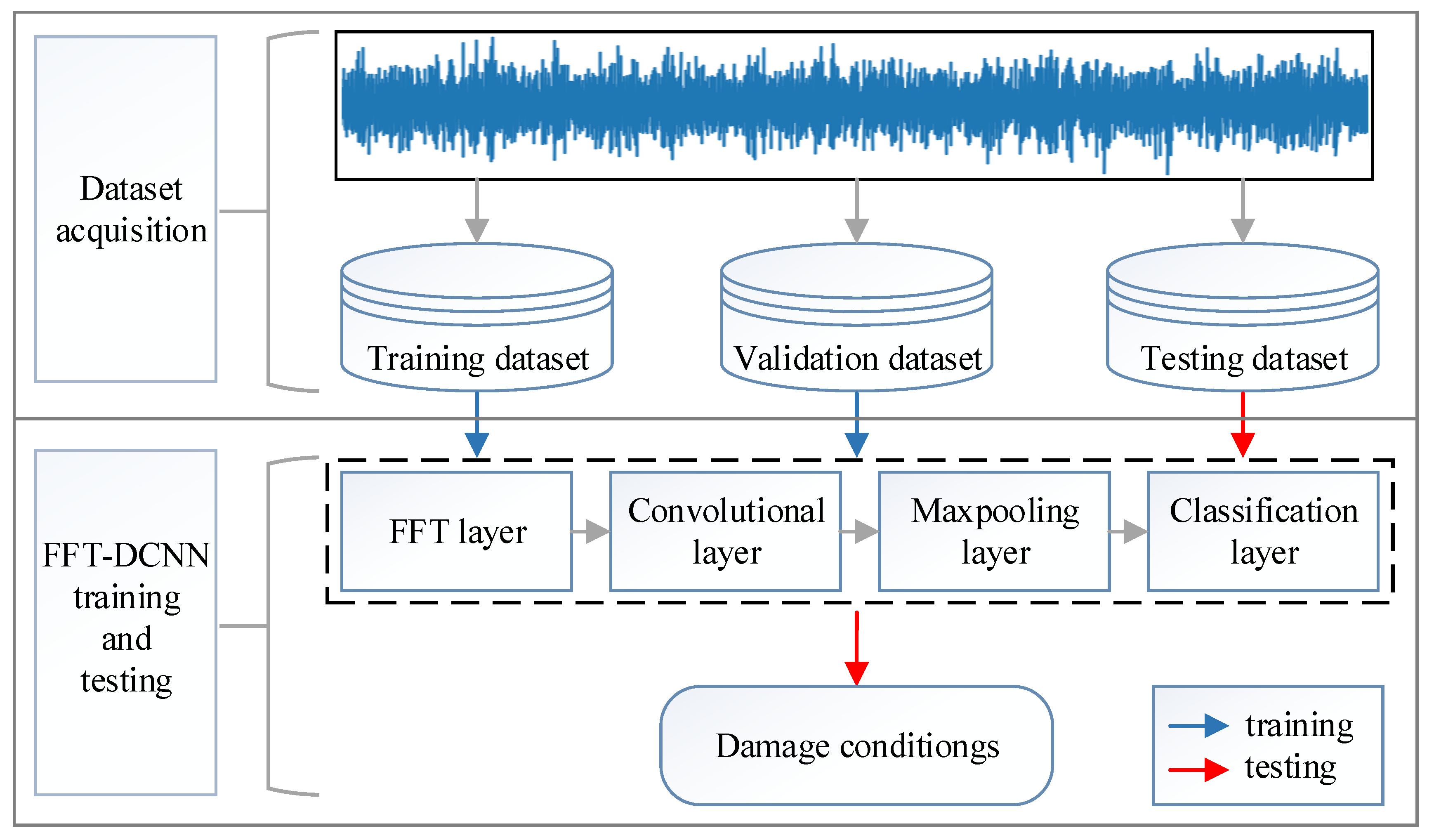
37] are selected to evaluate structural damage degree and improved accuracy in structural damage detection. The accuracy of KNN, RF, and XGBoost is 67.64%, 70.24%, and 75.78%, respectively, representing a low ability for recognizing structural damage detection. For these algorithms, such as SVM, KNN, RF, and XGBoost, the time-sequence data of acceleration are input datasets. For FFT-DCNN and FFT-SVM algorithms, the time sequence is transformed into frequency information by the FFT method, and then frequency information is fed into DCNN or SVM algorithms. The relative setting of these algorithms are as follows:
SVM: A Gaussian RBF function is used as the SVR kernel function, and a grid search is used to determine the penalty parameters and kernel parameters . The search range and are [10−4, 104] and [2−4, 24] by the grid searching method, respectively. Tolerance for stopping criterion is set to 1e-3, and it is enough to satisfy the error criterion.
KNN: The number of neighbors is set to 5. The value of function weights is set to uniform, representing that all points in each neighborhood are weighted equally. The power parameters. The Minkowski metric is set to 1, and it is equivalent to using Manhattan distance. The leaf size that affects the construction and query speed is set to 30.
RF: The number of trees in the forest is 100, and the maximum depth is set 3. The min samples split is set to 2, which denotes the minimum number of samples required to split an internal node. Min samples leaf represents that training samples in each of the left and right branches, and the values of Min samples leaf are set to 5. The value of Max features is set to ‘auto’, representing that the number of features to be considered when looking for the best split.
XGBoost: The maximum depth of a tree is set to 6, and the minimum child weight depth of a tree is 1. To making the update step more conservative, the max delta step is set to 0.1. L2 regularization term on weights is set 1, which can reduce the overfitting problem. The learning rate is set to 0.3. The fraction columns of random samples for each tree are set to 1.
Table 5 shows the comparison of damage detection ability between the algorithms mentioned above and the proposed method. It can be seen from
Table 5 that the proposed method has higher accuracy in 93.38% than classical ML methods. In addition, the FFT-SVM improves accuracy by 4.56% than SVM when FFT is added to SVM. It shows that the preprocessing method, for example, FFT method, can reduce the effect of fault or noisy data and improved accuracy in structural damage detection.
To observing the classification result of every defined pattern for test data based on different algorithms, evaluation criteria including Precision, Recall, and F
1-sore are utilized in
Figure 9,
Figure 10 and
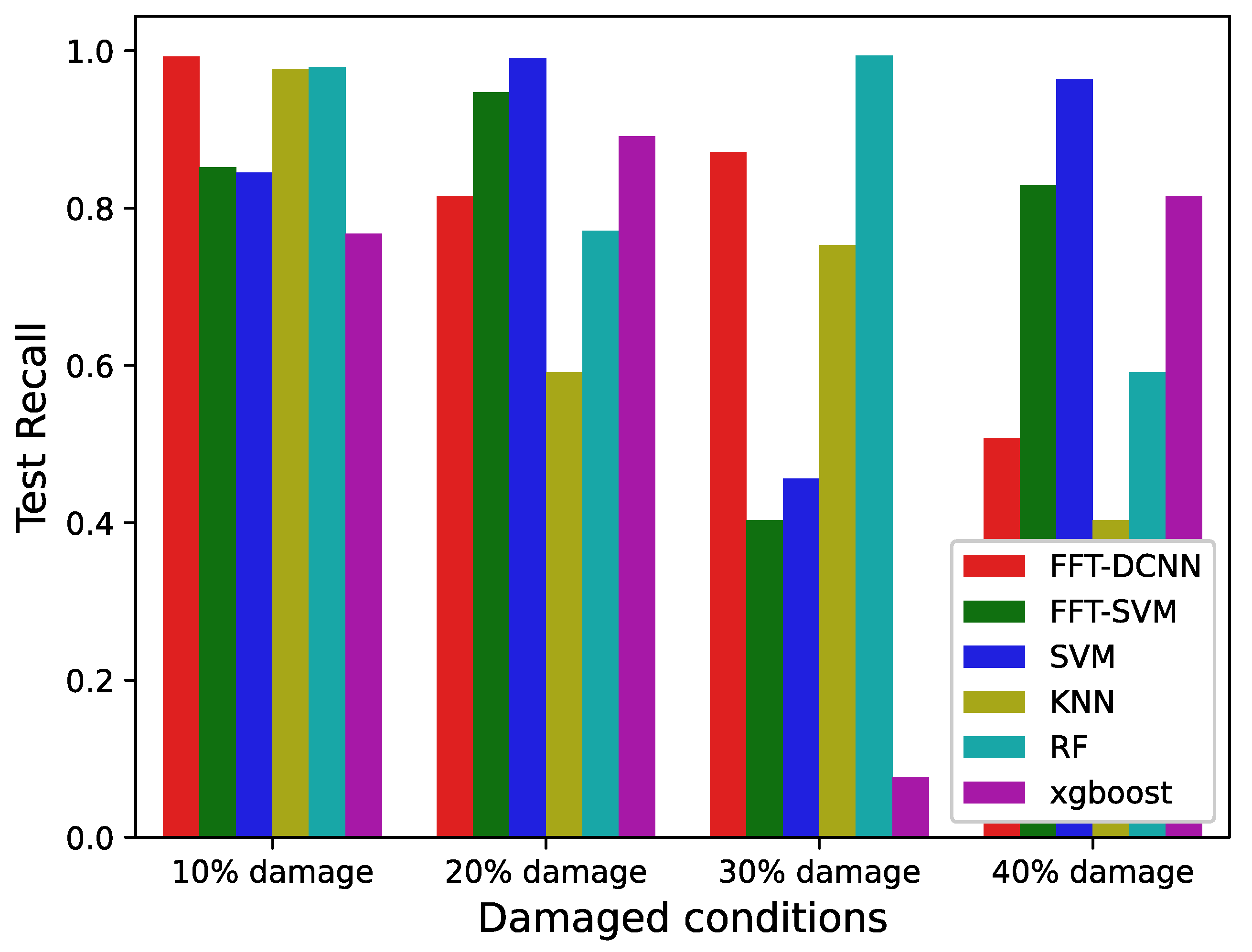
Figure 11. Recall represents the number of positive class predictions made out of all positive examples in the dataset. It can be seen from
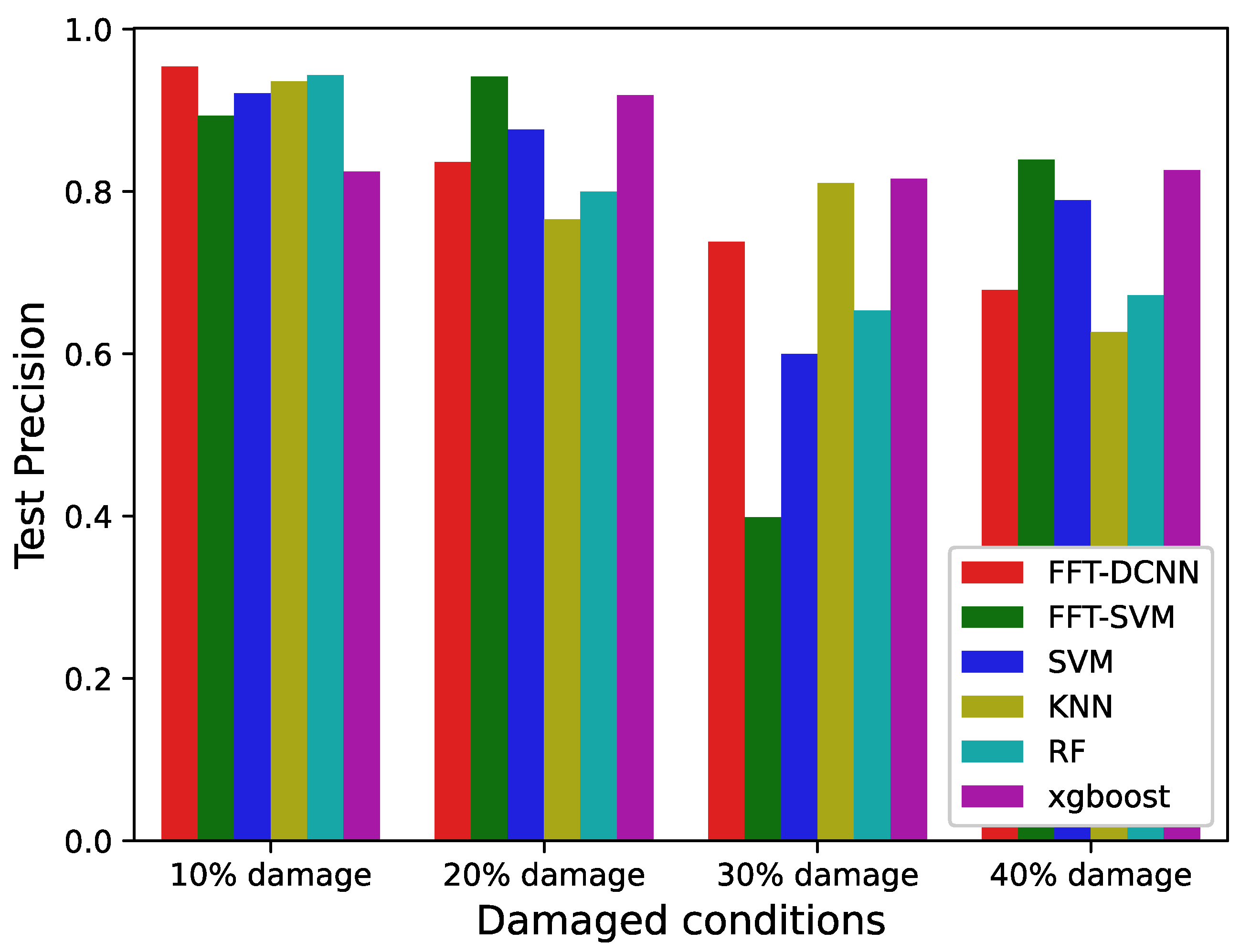
Figure 9 that the obtained Recall scores of 10%, 20%, and 30% damaged conditions are approximately over 0.8 using the FFT-DCNN algorithm, with the exception of 40% damaged conditions, for which the scores fall approximately 0.5. In addition, using the precision evaluating on test data, similar results are achieved for FFT-DCNN algorithm. For 10%, 20%, 30%, and 40% damaged conditions, the Precision is approximately over 0.7 with a high recognition performance, which is shown in
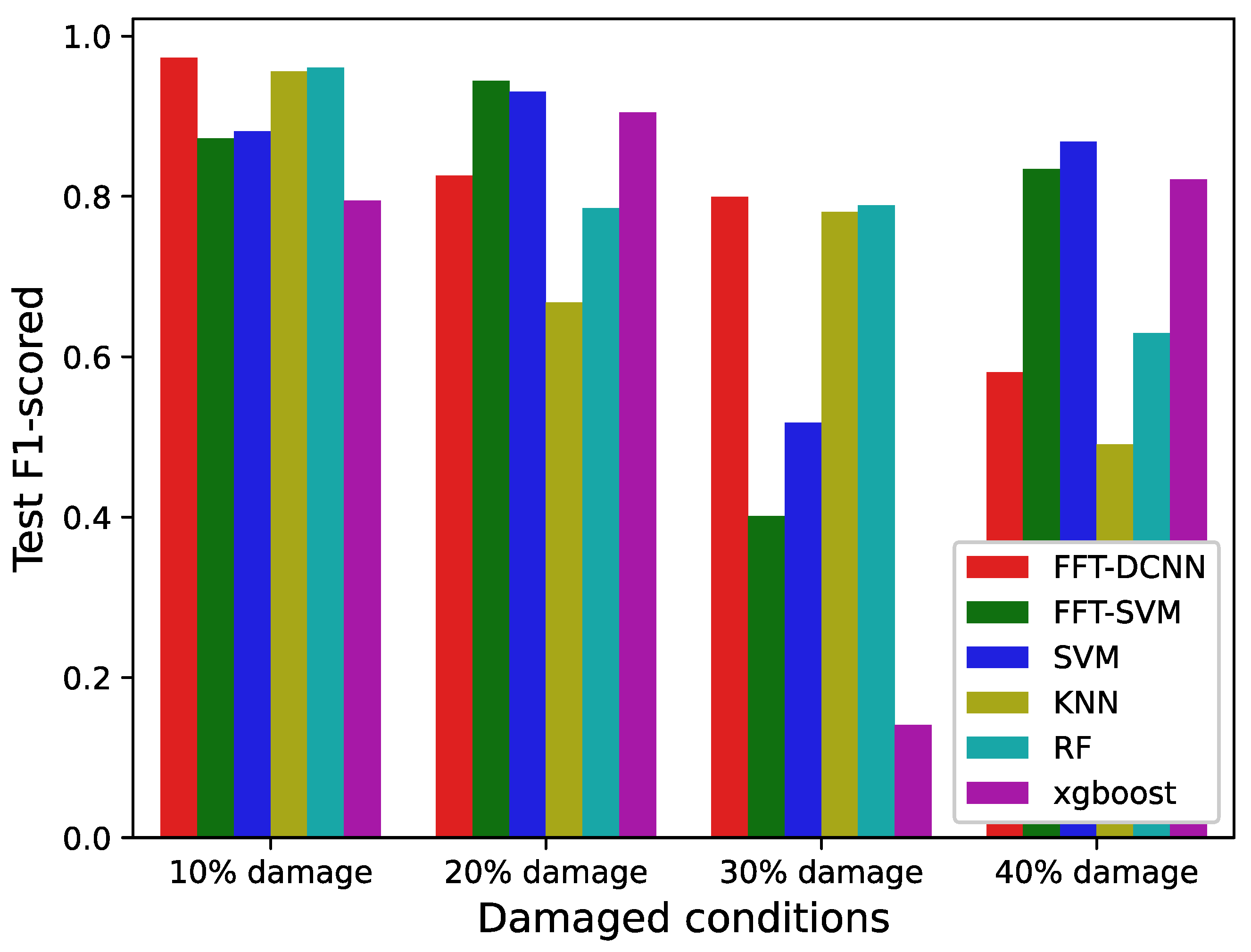
Figure 10. It can be seen from
Figure 11 that the exception of 40% damaged conditions achieves a low score, and other patterns (such as 10%, 20%, and 30% damaged conditions) obtain a high score using FFT-DCNN algorithm.
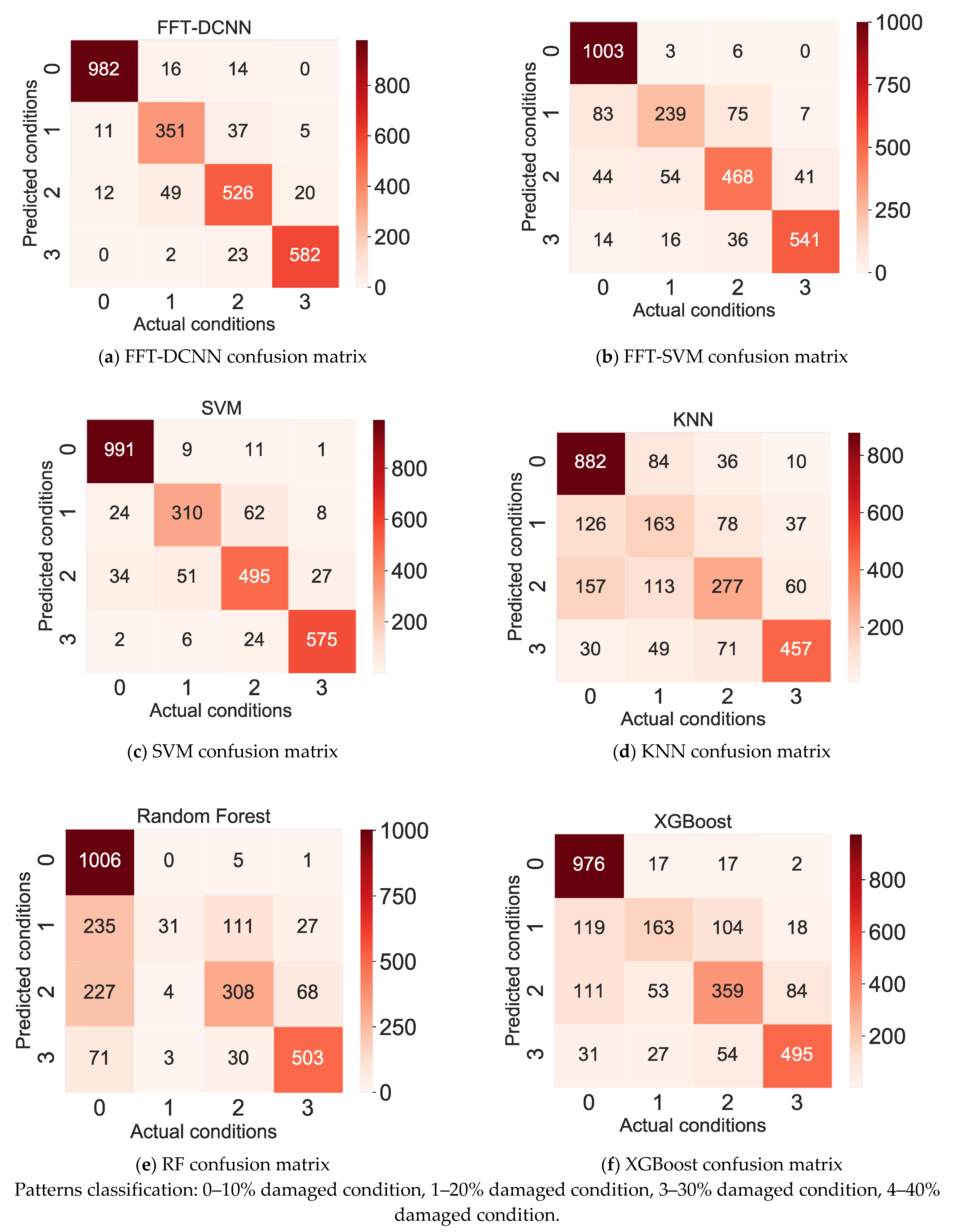
In order to reveal the classification of different algorithms under four damaged conditions of a three-story building structure,
Figure 12 shows the confusion matrix of the proposed approach and compared algorithms. More specifically, in the FFT-DCNN method, the accuracy of 10% damaged condition and 40% damaged condition keep a high value over 95%. For 20% damaged condition, 37 samples are misclassified as 30% damaged condition, and 11 samples are misclassified as 10% damaged condition. The Precision keeps a high value of over 86%. The Precision is 86.7% for 30% damaged condition. Finally, the total accuracy of test data for FFT-DCNN is 93.29%, which illustrates the excellent ability of the proposed method for recognizing structural damage conditions compared with other methods, including FFT-SVM (90.15%), SVM (85.59%), KNN (67.64%), RF (70.27%), and XGBoost (75.78%). In addition, for the FFT-SVM algorithm, the numbers of classification accuracy in 0–3 damaged conditions are 1003, 239, 468, and 541, respectively, in
Figure 12b. The numbers of classification accuracy in 0–3 damaged conditions are 991, 310, 495, and 575, respectively, in
Figure 12c. It indicates that accuracy can be improved when the acceleration data are transformed into frequency information. More importantly, the frequency of the three-story frame generates obvious changes compared to methods based on time sequence when the structure suffers different damaged degrees. Our proposed method utilizes frequency information of three-story frame to recognize structural damage with high performance.
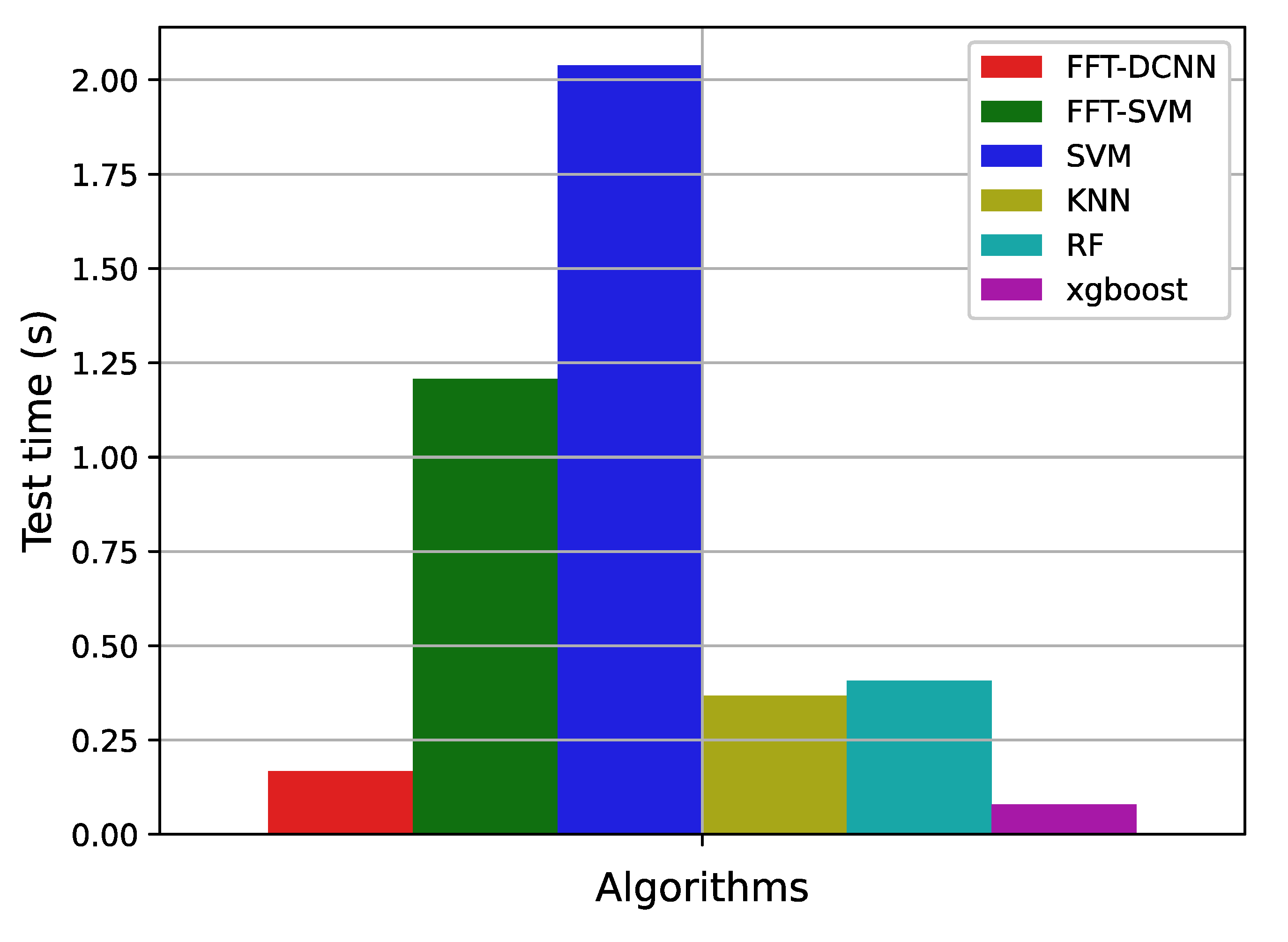
All experimental algorithms are performed in the same Windows server, and the server is configured as: GPU is GeForce RTX 3080Ti, RAM is 32 GB, and AMD Ryzen 9 5950X 16-Core Processor. It can be seen from
Figure 13 and
Figure 14 and
Table 6 that the proposed methods cost more time than ML algorithms during training and testing datasets. It is mainly because FFT-CNN continually updates the parameter of the network using a number of datasets. In addition, the training process finishes when the network’s loss curve begins to converge, which can cost a large amount of time in
Figure 13. With the increase in computing ability, the consuming time of algorithms will be reduced in the future. Thus, the accuracy of structural damage detection should receive the primary attention, which can affect public safety.
Moreover, the test time is an important evaluation metric to judge whether the algorithm can be utilized in actual engineering. It can be seen that the proposed method takes a short time on test datasets, compared with FFT-SVM, SVM, KNN, and RF. Thus, the proposed method can be designed for recognizing structural damage in actual civil engineering.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}