
Design, Construction and Validation of a Proof of Concept Flexible–Rigid Mechanism Emulating Human Leg Behavior

 , , ,
, , ,
Abstract
:1. Introduction
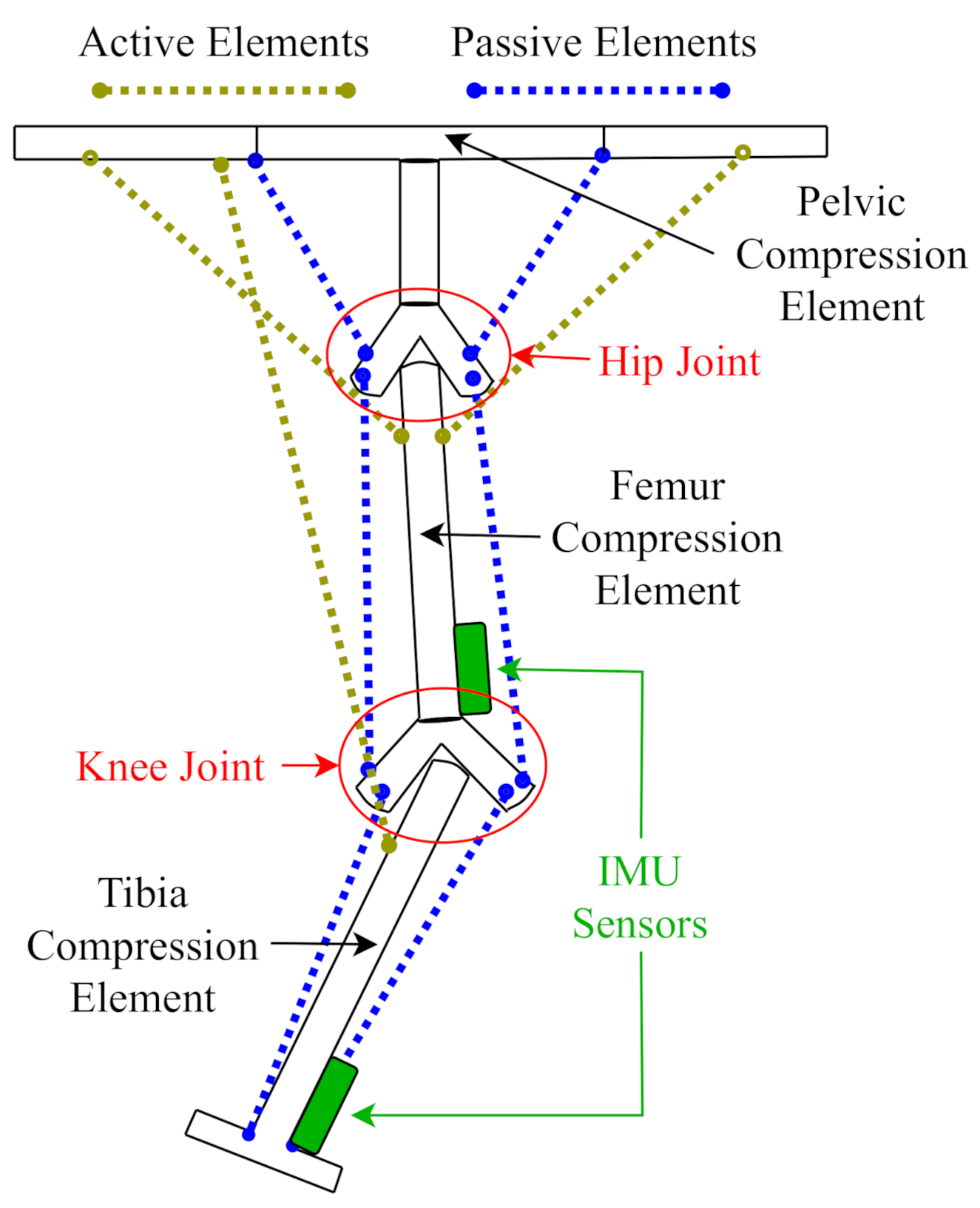
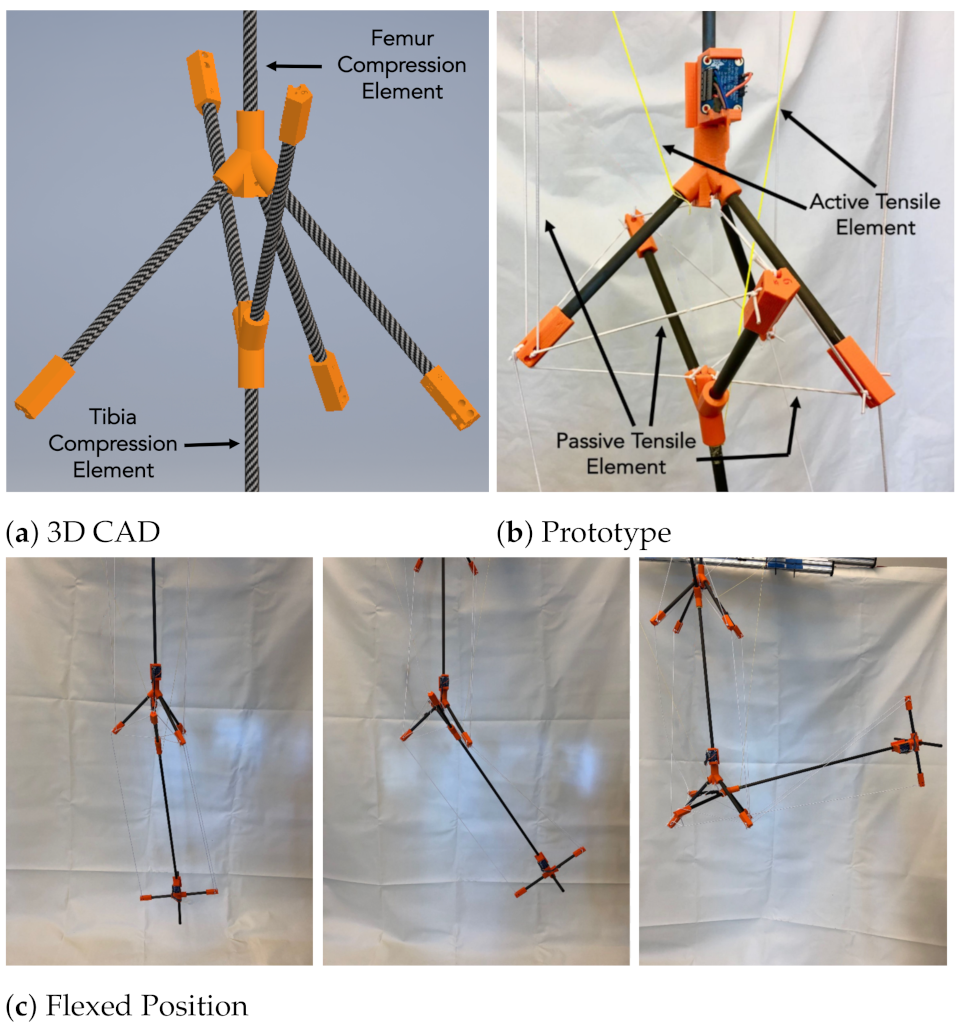
2. Structural Design
2.1. Compression Elements
2.2. Tensile Elements
2.3. Joint Design
2.4. Directed Cable Routing
2.5. Actuator Selection
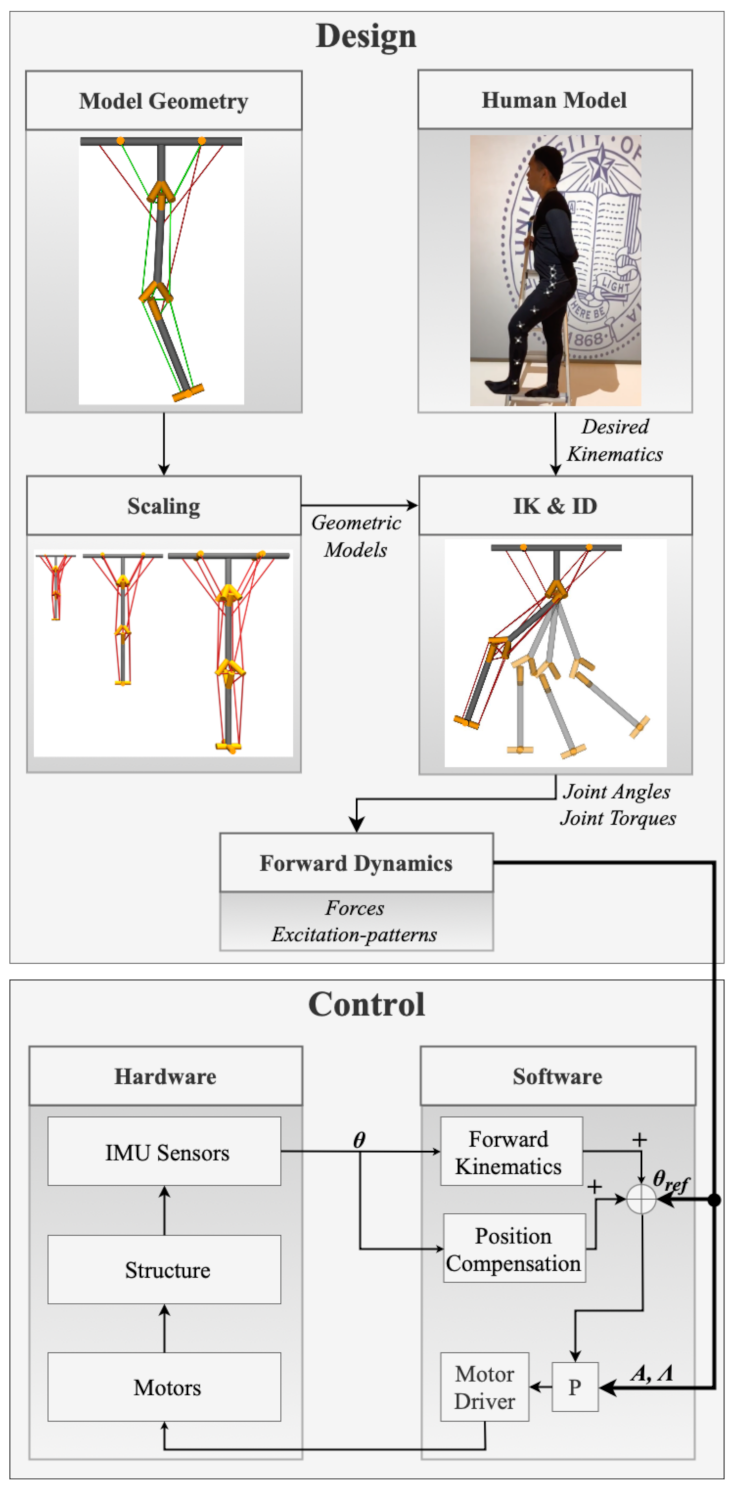
3. Simulation Modeling
- Moments due to muscle forces:
- Muscle contraction rate:
- Muscle activation rate:
- Muscle activation value ;
- Normalized length of the unit muscle and tendon ;
- Normalized velocity of the unit muscle ;
- Maximum Pennation Angle .
4. Control and Actuation Strategies
4.1. Open-Loop Control
4.2. Closed-Loop Control
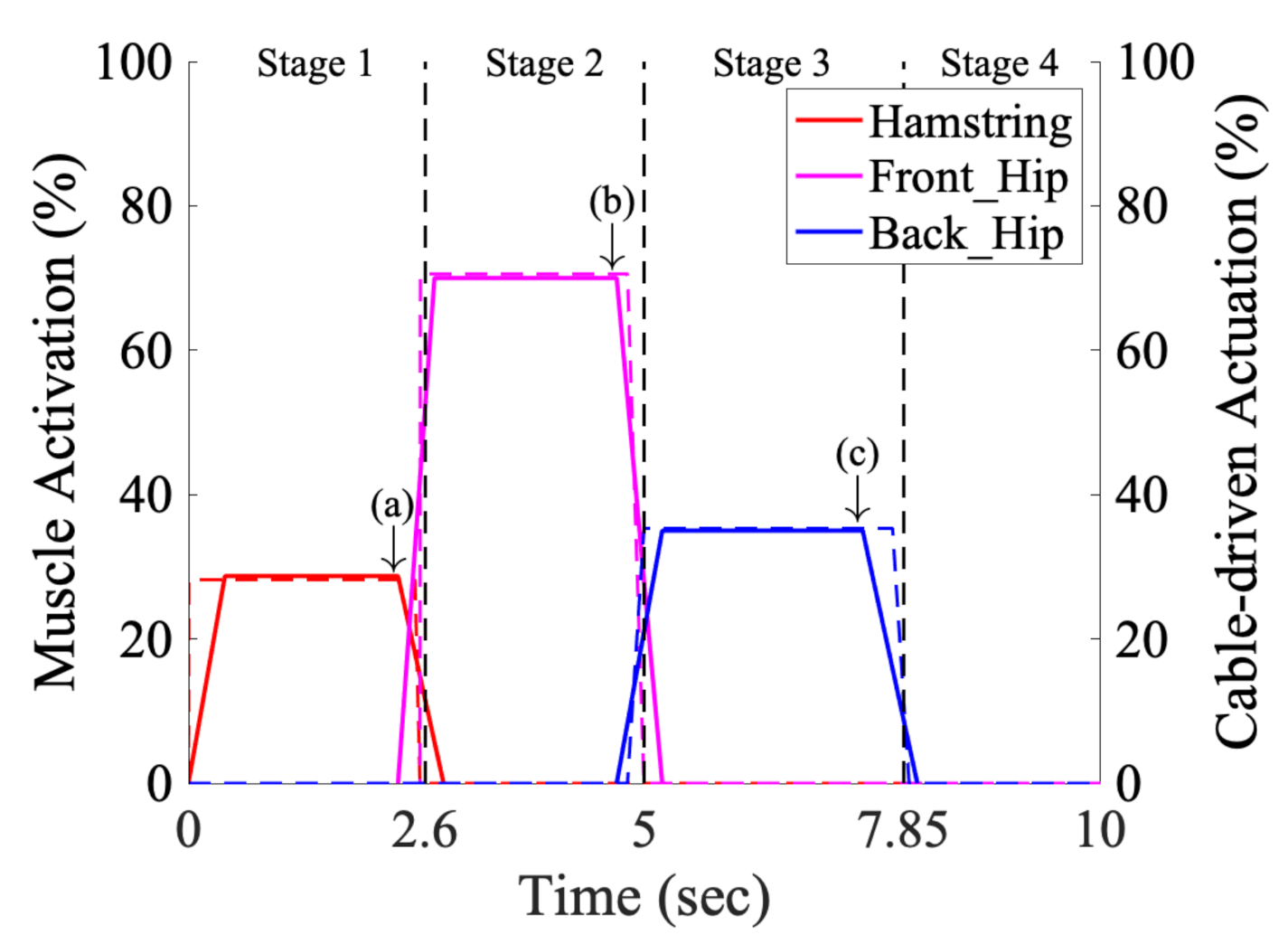
4.3. Gait Experiment
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| net muscle moments | |
| q | generalized positions |
| a | muscle activation values |
| l | muscle fiber lengths |
| muscle contraction dynamics | |
| moment arms | |
| A | activation dynamics |
| x | generalized terms for model controls |
| q | vector of generalized positions |
| vector for velocities | |
| vector for accelerations | |
| inverse of the mass matrix | |
| vector of generalized forces | |
| vector of Coriolis and centrifugal forces | |
| vector of gravitational forces | |
| contractile elements | |
| parallel elements | |
| series elements | |
| passive forces | |
| active forces | |
| normalized length of the unit muscle | |
| normalized length of the unit tendon | |
| normalized velocity of the unit muscle | |
| maximum pennation angle | |
| n | number of joints |
| moment | |
| r | radial distance |
| Q | muscle force |
| controls the force applied | |
| hip joint angle | |
| knee joint angle | |
| target angle | |
| IMU | inertial measurement unit |
| CAD | computer-aided design |
| 3D | three-dimensional |
References
- Nashner, L. Adapting reflexes controlling the human posture. Exp. Brain Res. 1976, 26, 59–72. [Google Scholar] [CrossRef]
- Tur, J.M.M.; Juan, S.H. Tensegrity frameworks: Dynamic analysis review and open problems. Mech. Mach. Theory 2009, 44, 1–18. [Google Scholar]
- Scarr, G. Helical tensegrity as a structural mechanism in human anatomy. Int. J. Osteopath. Med. 2011, 14, 24–32. [Google Scholar] [CrossRef]
- Dwivedy, S.K.; Eberhard, P. Dynamic analysis of flexible manipulators, a literature review. Mech. Mach. Theory 2006, 41, 749–777. [Google Scholar] [CrossRef]
- Ozgoli, S.; Taghirad, H. A survey on the control of flexible joint robots. Asian J. Control 2006, 8, 332–344. [Google Scholar] [CrossRef]
- Hughes, J.; Culha, U.; Giardina, F.; Guenther, F.; Rosendo, A.; Iida, F. Soft manipulators and grippers: A review. Front. Robot. AI 2016, 3, 69. [Google Scholar] [CrossRef] [Green Version]
- George Thuruthel, T.; Ansari, Y.; Falotico, E.; Laschi, C. Control strategies for soft robotic manipulators: A survey. Soft Robot. 2018, 5, 149–163. [Google Scholar] [CrossRef] [PubMed]
- Zoss, A.B.; Kazerooni, H.; Chu, A. Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX). IEEE/ASME Trans. Mechatron. 2006, 11, 128–138. [Google Scholar] [CrossRef]
- Haegele, M.; Maufroy, C.; Kraus, W.; Siee, M.; Breuninger, J. Musculoskeletal robots and wearable devices on the basis of cable-driven actuators. In Soft Robotics; Springer: Berlin/Heidelberg, Germany, 2015; pp. 42–53. [Google Scholar]
- Asbeck, A.T.; De Rossi, S.M.; Holt, K.G.; Walsh, C.J. A biologically inspired soft exosuit for walking assistance. Int. J. Robot. Res. 2015, 34, 744–762. [Google Scholar] [CrossRef]
- Costa, N.; Caldwell, D.G. Control of a biomimetic “soft-actuated” 10dof lower body exoskeleton. In Proceedings of the First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob 2006), Pisa, Italy, 20–22 February 2006; pp. 495–501. [Google Scholar]
- Tolley, M.T.; Shepherd, R.F.; Mosadegh, B.; Galloway, K.C.; Wehner, M.; Karpelson, M.; Wood, R.J.; Whitesides, G.M. A resilient, untethered soft robot. Soft Robot. 2014, 1, 213–223. [Google Scholar] [CrossRef]
- Ansarieshlaghi, F.; Eberhard, P. Hybrid Force/Position Control of a Very Flexible Parallel Robot Manipulator in Contact with an Environment. ICINCO 2019, 2, 59–67. [Google Scholar]
- Jiang, M.; Zhou, Z.; Gravish, N. Flexoskeleton printing enables versatile fabrication of hybrid soft and rigid robots. Soft Robot. 2020, 7, 770–778. [Google Scholar] [CrossRef]
- Juan, S.H.; Tur, J.M.M. Tensegrity frameworks: Static analysis review. Mech. Mach. Theory 2008, 43, 859–881. [Google Scholar] [CrossRef] [Green Version]
- Wang, N.; Tytell, J.D.; Ingber, D.E. Mechanotransduction at a distance: Mechanically coupling the extracellular matrix with the nucleus. Nat. Rev. Mol. Cell Biol. 2009, 10, 75–82. [Google Scholar] [CrossRef]
- Bruce, J.; Sabelhaus, A.; Chen, Y.; Lu, D.; Morse, K.; Milam, S.; Caluwaerts, K.; Agogino, A.M.; SunSpiral, V. SUPERball: Exploring tensegrities for planetary probes. In Proceedings of the 12th International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS), Montreal, QC, Canada, 17–19 June 2014. [Google Scholar]
- Chen, L.H.; Kim, K.; Tang, E.; Li, K.; House, R.; Zhu, E.L.; Fountain, K.; Agogino, A.M.; Agogino, A.; Sunspiral, V.; et al. Soft spherical tensegrity robot design using rod-centered actuation and control. J. Mech. Robot. 2017, 9, 025001. [Google Scholar] [CrossRef]
- Friesen, J.; Pogue, A.; Bewley, T.; de Oliveira, M.; Skelton, R.; Sunspiral, V. DuCTT: A tensegrity robot for exploring duct systems. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 4222–4228. [Google Scholar]
- Hustig-Schultz, D.; SunSpiral, V.; Teodorescu, M. Morphological design for controlled tensegrity quadruped locomotion. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 4714–4719. [Google Scholar]
- Levin, S.M. The tensegrity-truss as a model for spine mechanics: Biotensegrity. J. Mech. Med. Biol. 2002, 2, 375–388. [Google Scholar] [CrossRef]
- Mirletz, B.T.; Quinn, R.D.; SunSpiral, V. Cpgs for adaptive control of spine-like tensegrity structures. In Proceedings of the 2015 International Conference on Robotics and Automation (ICRA2015) Workshop on Central Pattern Generators for Locomotion Control: Pros, Cons & Alternatives, Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Lessard, S.; Castro, D.; Asper, W.; Chopra, S.D.; Baltaxe-Admony, L.B.; Teodorescu, M.; SunSpiral, V.; Agogino, A. A bio-inspired tensegrity manipulator with multi-DOF, structurally compliant joints. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 5515–5520. [Google Scholar]
- Baltaxe-Admony, L.B.; Robbins, A.S.; Jung, E.A.; Lessard, S.; Teodorescu, M.; SunSpiral, V.; Agogino, A. Simulating the human shoulder through active tensegrity structures. In Proceedings of the ASME 2016 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Charlotte, NC, USA, 21–24 August 2016; American Society of Mechanical Engineers: New York, NY, USA, 2016; p. V006T09A027. [Google Scholar]
- Castro, D. Modeling the Human Knee Using Tensegrity. Ph.D. Thesis, University of California, Santa Cruz, CA, USA, 2017. [Google Scholar]
- Jung, E.; Ly, V.; Cessna, N.; Ngo, M.L.; Castro, D.; SunSpiral, V.; Teodorescu, M. Bio-inspired Tensegrity Flexural Joints. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 1–6. [Google Scholar]
- Scarr, G. A consideration of the elbow as a tensegrity structure. Int. J. Osteopath. Med. 2012, 15, 53–65. [Google Scholar] [CrossRef]
- Lessard, S.; Bruce, J.; Jung, E.; Teodorescu, M.; SunSpiral, V.; Agogino, A. A light-weight, multi-axis compliant tensegrity joint. arXiv 2015, arXiv:1510.07595. [Google Scholar]
- Caluwaerts, K.; Despraz, J.; Işçen, A.; Sabelhaus, A.P.; Bruce, J.; Schrauwen, B.; SunSpiral, V. Design and control of compliant tensegrity robots through simulation and hardware validation. J. R. Soc. Interface 2014, 11, 20140520. [Google Scholar] [CrossRef] [Green Version]
- BulletPhysicsEngine. 2013. Available online: http://www.bulletphysics.org/ (accessed on 23 September 2021).
- Goyal, R.; Chen, M.; Majji, M.; Skelton, R.E. MOTES: Modeling of Tensegrity Structures. J. Open Source Softw. 2019, 4, 1613. [Google Scholar] [CrossRef]
- Pajunen, K.; Johanns, P.; Pal, R.K.; Rimoli, J.J.; Daraio, C. Design and impact response of 3D-printable tensegrity-inspired structures. Mater. Des. 2019, 182, 107966. [Google Scholar] [CrossRef]
- Delp, S.L.; Anderson, F.C.; Arnold, A.S.; Loan, P.; Habib, A.; John, C.T.; Guendelman, E.; Thelen, D.G. OpenSim: Open-source software to create and analyze dynamic simulations of movement. IEEE Trans. Biomed. Eng. 2007, 54, 1940–1950. [Google Scholar] [CrossRef] [Green Version]
- Vivian, M.; Tagliapietra, L.; Sartori, M.; Reggiani, M. Dynamic simulation of robotic devices using the biomechanical simulator OpenSim. In Intelligent Autonomous Systems 13; Springer: Cham, Switzerland, 2016; pp. 1639–1651. [Google Scholar]
- Wang, A.; Lu, J.; Ge, Y.; Yu, J.; Zhang, S. Simulation of Limb Rehabilitation Robot Based on OpenSim. In International Conference on Bio-Inspired Computing: Theories and Applications; Springer: Singapore, 2019; pp. 647–654. [Google Scholar]
- Kutilek, P.; Svoboda, Z.; Smrcka, P. Evaluation of bilateral asymmetry of the muscular forces using opensim software and bilateral cyclograms. In Mechatronics 2013; Springer: Cham, Switzerland, 2014; pp. 801–808. [Google Scholar]
- Scarton, A.; Jonkers, I.; Guiotto, A.; Spolaor, F.; Guarneri, G.; Avogaro, A.; Cobelli, C.; Sawacha, Z. Comparison of lower limb muscle strength between diabetic neuropathic and healthy subjects using OpenSim. Gait Posture 2017, 58, 194–200. [Google Scholar] [CrossRef] [PubMed]
- SimTK. How Forward Dynamics Works. 1993. Available online: https://simtk-confluence.stanford.edu/display/OpenSim/How+Forward+Dynamics+Works (accessed on 25 August 2017).
- Thelen, D.G. Adjustment of muscle mechanics model parameters to simulate dynamic contractions in older adults. J. Biomech. Eng. 2003, 125, 70–77. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Adafruit Unified BNO055 Driver (AHRS/Orientation). Available online: https://github.com/adafruit/Adafruit_BNO055 (accessed on 10 March 2021).
- Appleton, B. Stretching and Flexibility: Normal Ranges of Joint Motion. 2007. Available online: https://people.bath.ac.uk/masrjb/Stretch/stretching_8.html (accessed on 20 August 2017).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Muscle Element | (N) | (m) | (deg) | |
|---|---|---|---|---|
| Active | 100 | 0.128 | 1.8 | <1 |
| Thelen [39] | 1400 | 0.090 | 2.4 | 7 |
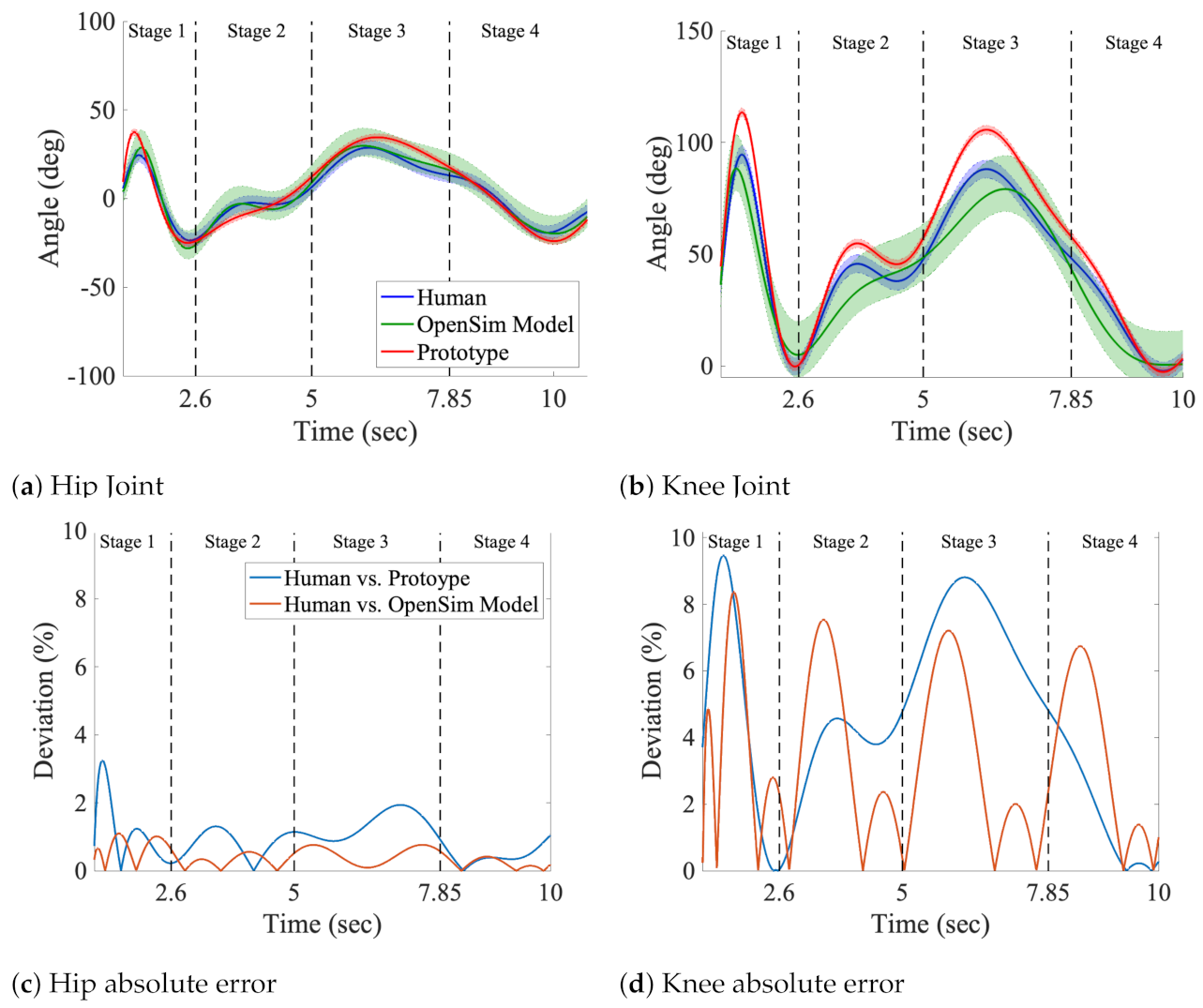
| Human vs. Prototype Joint | Stage 1 | Stage 2 | Stage 3 | Stage 4 |
| Hip | 3.1 | 1.3 | 1.9 | 0.97 |
| Knee | 9.4 | 4.5 | 8.8 | 4.7 |
| Human vs. OpenSim 3.0 Model | Stage 1 | Stage 2 | Stage 3 | Stage 4 |
| Hip vs. Prototype Joint | 1.03 | 0.54 | 0.75 | 0.41 |
| Knee vs. Prototype Joint | 8.3 | 7.5 | 7.2 | 6.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, E.; Ly, V.; Cheney, C.; Cessna, N.; Ngo, M.L.; Castro, D.; Teodorescu, M. Design, Construction and Validation of a Proof of Concept Flexible–Rigid Mechanism Emulating Human Leg Behavior. Appl. Sci. 2021, 11, 9351. https://0-doi-org.brum.beds.ac.uk/10.3390/app11199351
Jung E, Ly V, Cheney C, Cessna N, Ngo ML, Castro D, Teodorescu M. Design, Construction and Validation of a Proof of Concept Flexible–Rigid Mechanism Emulating Human Leg Behavior. Applied Sciences. 2021; 11(19):9351. https://0-doi-org.brum.beds.ac.uk/10.3390/app11199351
Chicago/Turabian StyleJung, Erik, Victoria Ly, Christopher Cheney, Nicholas Cessna, Mai Linh Ngo, Dennis Castro, and Mircea Teodorescu. 2021. "Design, Construction and Validation of a Proof of Concept Flexible–Rigid Mechanism Emulating Human Leg Behavior" Applied Sciences 11, no. 19: 9351. https://0-doi-org.brum.beds.ac.uk/10.3390/app11199351