
A Novel Multi-Objective and Multi-Constraint Route Recommendation Method Based on Crowd Sensing



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
2.1. Tour Route Recommendation
2.2. POI Scoring Mechanism
2.3. Route Constraint Model
3. Preliminaries
3.1. Problem Definition
3.2. Score Mechanism
3.2.1. Interest Tag Matching Score
3.2.2. Crowd Sensing Scores
- Crowd Sensing Social Score. Generally speaking, the evaluation of netizens reflects the reputation and characteristics of the attractions to a certain extent. The rating of the scenic spot is represented as , and the rating of the user ’s interest the attraction is , which is synthesized by ratings and text reviews. Then, the crowd sensing social score of the attraction is expressed as follows:In this paper, the same quantitative method is used to obtain the group intelligence perception social scores and of hotels and restaurants. Min-max standardization processing is performed to standardize the score.
- Crowd Sensing Location Score. According to statistical analysis, the distribution of attractions is closely related to the location distribution of restaurants and hotels. The total number of restaurants and hotels around the scenic spot represents its popularity to some extent. Based on this reasoning, the number of restaurants and hotels distributed within a given radius centered on the attraction is used as the attraction location score. Assume that the number of restaurants in the radius R of the attraction is , and the number of hotels is . The crowd sensing location score in radius r of scenic spot is as follows:
- Comprehensive Crowd Sensing Score. As the interest tag matching score contains the user’s personal preference information, the comprehensive crowd sensing score is obtained from the user rating and POI geographic location. By combining the social score and location score of crowd sensing, the comprehensive crowd sensing score of scenic spot is obtained, which is represented as:where is weight parameter to balance the crowd sensing score and interest tag matching score.
- Distance Dynamic Score. In order to introduce the influence of dynamic space-time on the accessibility of tourists, the space-time accessibility value between users and attractions is defined as:where is the distance attenuation coefficient; is the average road network distance from other attractions to the scenic spot ; represents the driving speed of the car, which determined by the road level; and is the weight. According to the comprehensive crowd sensing score of the scenic spot and the time-space accessibility value of the attraction, the metric of the user-selected scenic spot in the recommendation algorithm is expressed as follows.
3.3. Multi-Constraint Model
- Time Constraint. Let be the starting position of user and be the departure time. The distance between attractions and is . The user’s arrival time at the first attraction is marked . The arrival time at scenic spot is denoted as , and the total travel time spend by the user is denoted by . Then, scenic spot is added to the tour route. The time constraint model should be satisfied as follows:where denotes the opening time of , denotes the tour end time of , denotes the recommended visiting time for , and the minimum play time should meet half of the recommended visiting time in our model. is the time from the last attraction to the destination via the recommended route.
- Cost Constraint. The sum of POI consumption in the recommended route of the visitor should be less than or equal to the upper limit given by the user, which represented as:
- Multi-objective constraints. Considering the user’s target preference, is a collection of goals given by the user , which can be expressed as:where is the route attribute value under the specified target.
- Multi-Constraint Model. By considering all the above three constraints, the multi-constraints model of the overall tourism route is obtained as follows.
4. Multi-Objective and Multi-Constraint Route Recommendation Algorithm
4.1. Variable Neighborhood Search Algorithm
- Step1. Divide the attractions set A into neighborhood sets, every of which contains attractions. The sum value of attractions’ comprehensive crowd sensing score in each neighborhood set is regarded as its weight; then, all neighborhood sets’ weights are normalized by the random probability, where the probability sum of all neighborhood sets is 1.
- Step2. Select the neighborhood set to be searched in the way of roulette, and select the POI as a candidate point to join the candidate route according to user’s target. The target can be the highest route score or the largest number of route attractions. That is to say, according to the previously selected POIs, continue to search for POIs that meet the user’s requirements in the neighborhood until the end of the loop.
- Step3. Divide the attractions set A into neighborhood sets randomly again. Candidate POIs that were added to the candidate route are used as references. In this way, the rating values of attractions in each neighborhood set are dynamically changed, which adjusts the neighborhood set’s weights. Thus, the selected probability of a neighborhood set is updated.
- Step4. Redo Step1 to Step3 times; thus, the candidate route set can be generated.
| Algorithm 1 Variable neighborhood search algorithm. |
Input: A, , , , , Output: Route satisfying constraints in the first stage 1: while do 2: divide A into sets 3: 4: 5: Select POIs according to user’s targets 6: if then 7: and 8: while do 9: Update neighborhood set and select POIS 10: if then 11: 12: and 13: end if 14: end while 15: end if 16: end while |
4.2. Hybrid Particle Swarm Genetic Optimization Algorithm
| Algorithm 2 Hybrid particle swarm genetic optimization algorithm. |
Input: A, , , , Output: recommended route in the second stage 1: 2: 3: if then 4: 5: while do 6: 7: 8: if then 9: 10: end if 11: 12: 13: if then 14: Start a new iteration 15: end if 16: 17: 18: if then 19: 20: end if 21: end while 22: end if 23: 24: |
4.3. Algorithm Complexity Analysis
5. Experiment
5.1. Experimental Datasets
5.2. Experimental Setup
5.3. Experimental Results
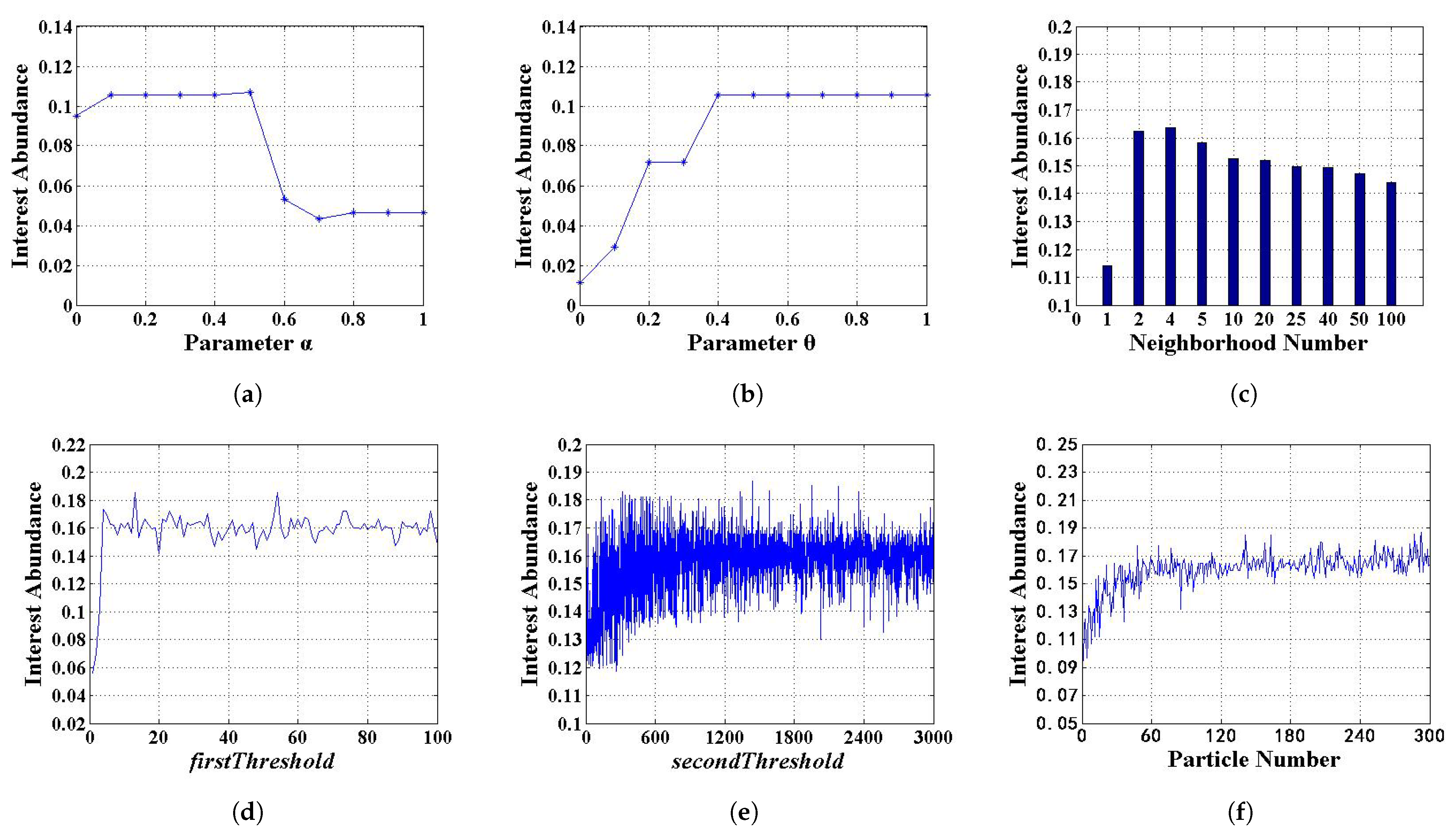
5.3.1. Sensitivity Analysis
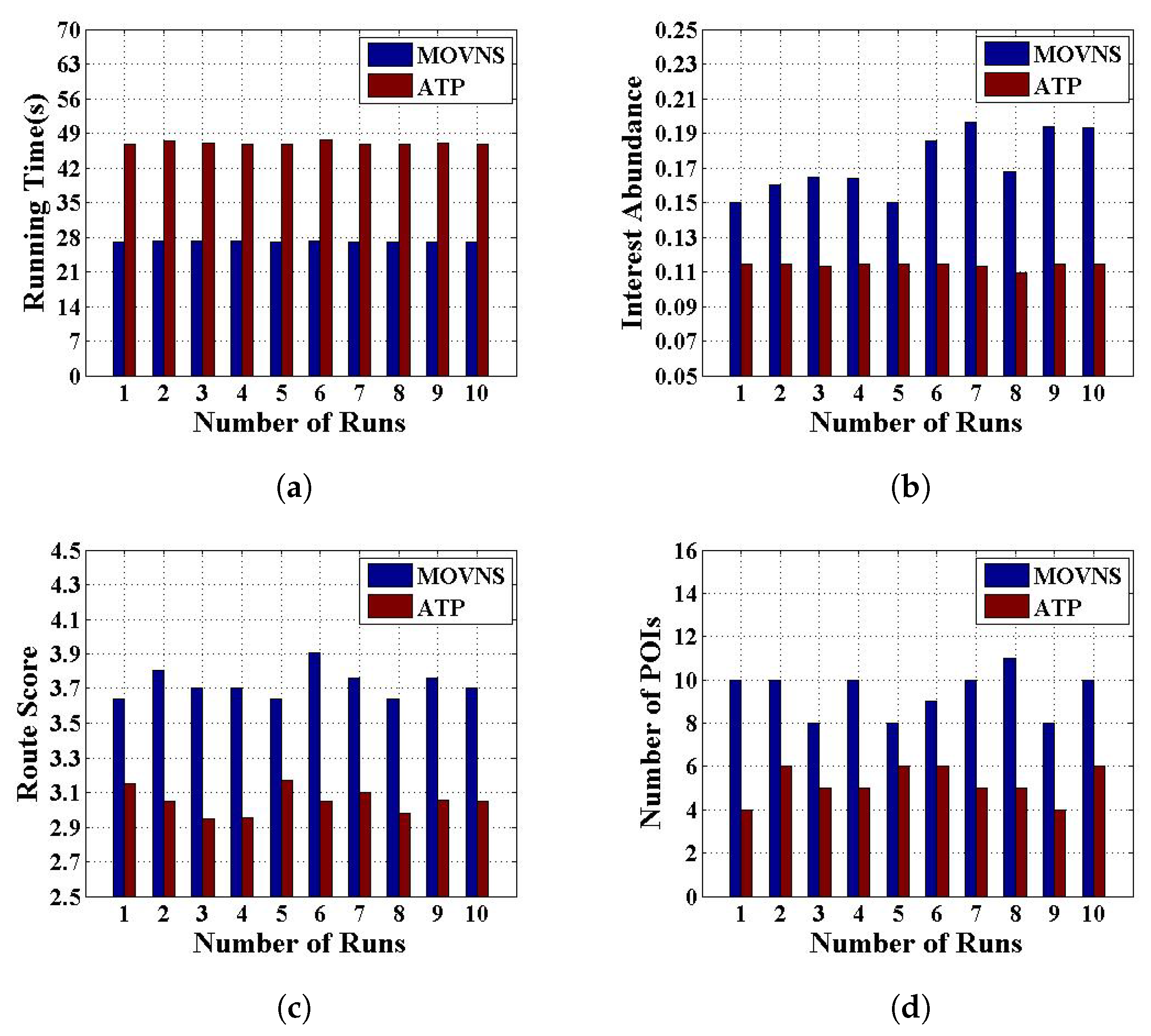
5.3.2. Comparative Experiments on Different Metrics
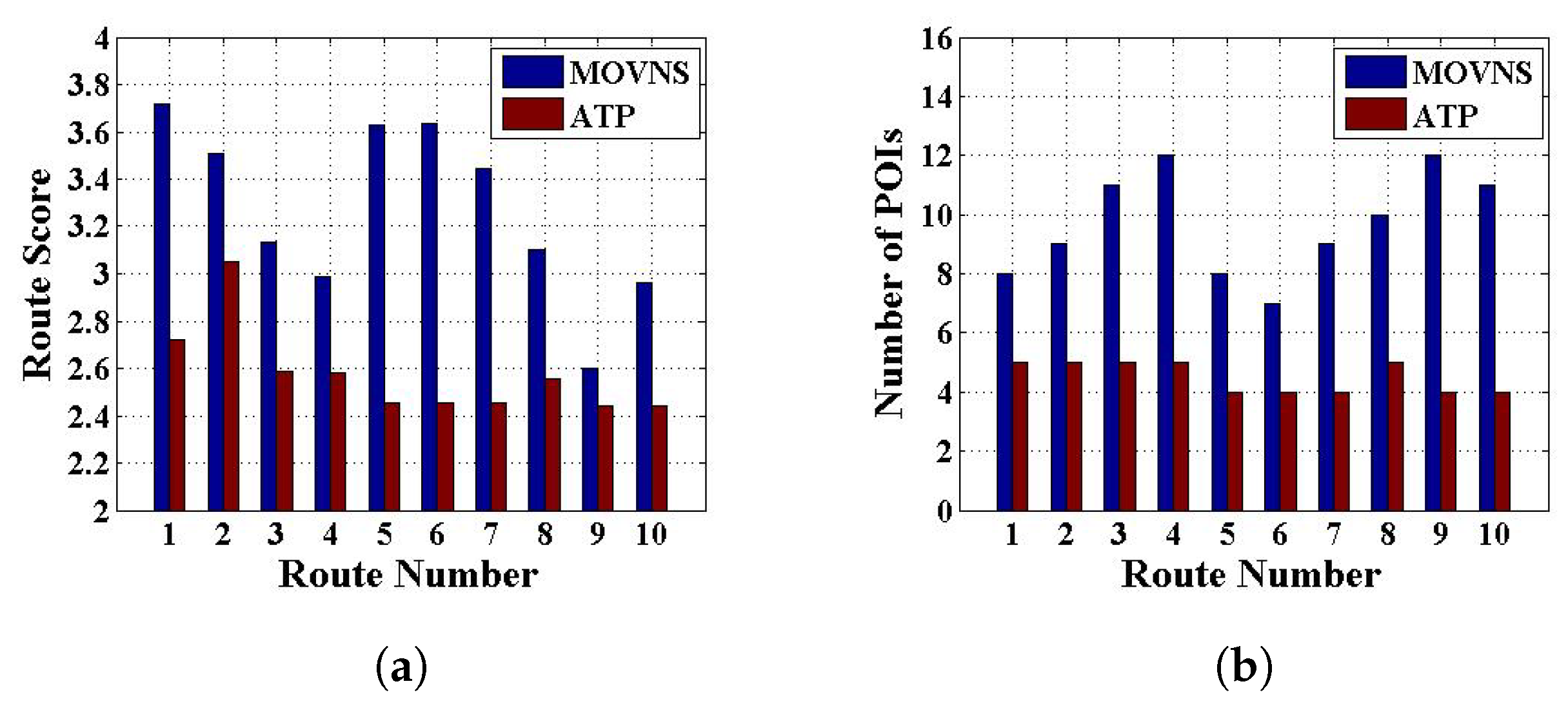
5.3.3. Comparative Experiments with Multiple Objectives
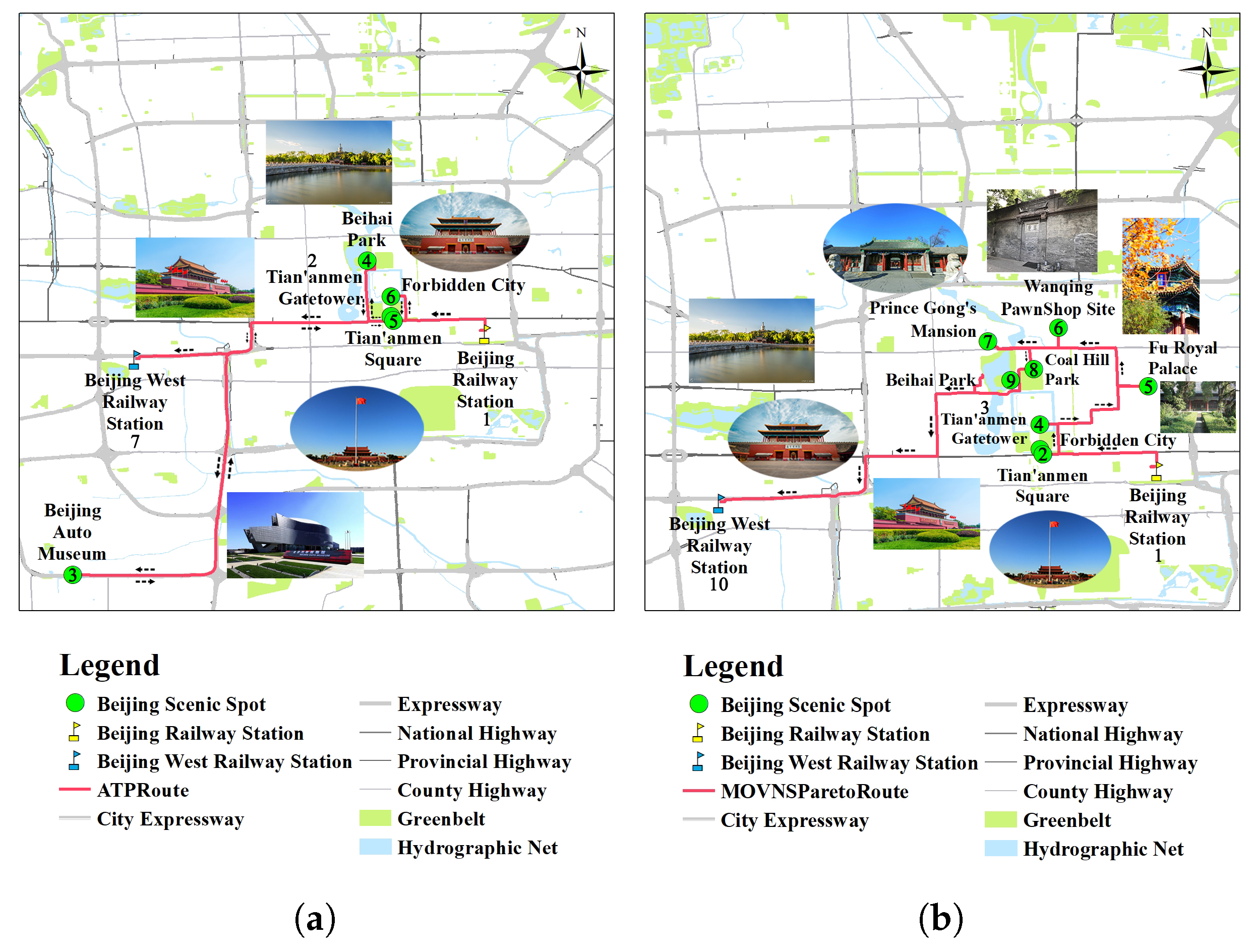
5.3.4. Tourist Route Simulation Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khan, M.U.S.; Khalid, O.; Huang, Y.; Ranjan, R.; Zhang, F.; Cao, J.; Veeravalli, B.; Khan, S.U.; Li, K.; Zomaya, A.Y. Macroserv: A route recommendation service for large-scale evacuations. IEEE Trans. Serv. Comput. 2017, 10, 589–602. [Google Scholar] [CrossRef]
- Sengvong, S.; Bai, Q. Persuasive public-friendly route recommendation with flexible rewards. In Proceedings of the IEEE International Conference on Agents (ICA), Beijing, China, 6–9 July 2017; pp. 109–114. [Google Scholar]
- Ji, S.; Wang, Z.; Li, T.; Zheng, Y. Spatio-temporal feature fusion for dynamic taxi route recommendation via deep reinforcement learning. Knowl.-Based Syst. 2020, 205, 106302. [Google Scholar] [CrossRef]
- Chen, C.; Zhang, D.; Guo, B.; Ma, X.; Pan, G.; Wu, Z. Tripplanner: Personalized trip planning leveraging heterogeneous crowdsourced digital footprints. IEEE Trans. Intell. Transp. Syst. 2014, 16, 1259–1273. [Google Scholar] [CrossRef]
- Hua, Y.; Cao, J.; Gu, Q.; Tan, Y. Pd-trp: A service composition approach for the personalized and optimized door-to-door travel plan recommendation. In Proceedings of the 2017 IEEE International Conference on Web Services (ICWS), Honolulu, HI, USA, 25–30 June 2017; pp. 768–775. [Google Scholar]
- Hu, G.; Qin, Y.; Shao, J. Personalized travel route recommendation from multi-source social media data. Multimed. Tools Appl. 2020, 79, 33365–33380. [Google Scholar] [CrossRef]
- Kurashima, T.; Iwata, T.; Irie, G.; Fujimura, K. Travel route recommendation using geotagged photos. Knowl. Inf. Syst. 2013, 16, 37–60. [Google Scholar] [CrossRef]
- Wang, J.; Wu, N.; Zhao, W.X.; Peng, F.; Lin, X. Empowering A* search algorithms with neural networks for personalized route recommendation. In Proceedings of the 25th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Anchorage, AK, USA, 4–8 August 2019; pp. 539–547. [Google Scholar]
- Zuo, Y.; Gong, M.; Zeng, J.; Ma, L.; Jiao, L. Personalized recommendation based on evolutionary multi-objective optimization. IEEE Comput. Intell. Mag. 2015, 16, 52–62. [Google Scholar] [CrossRef]
- Wang, S.; Gong, M.; Li, H.; Yang, J. Multi-objective optimization for long tail recommendation. Knowl.-Based Syst. 2016, 104, 145–155. [Google Scholar] [CrossRef]
- Zhou, Z.; Yang, M.; Sun, F.; Wang, Z.; Wang, B. A Continuous Transportation Network Design Problem with the Consideration of Road Congestion Charging. Sustainability 2021, 13, 7008. [Google Scholar] [CrossRef]
- Pop, M.D.; Prostean, O.; Prostean, G. Prediction of Route Choosing Behavior Based on Genetic Algorithm Approach. In Proceedings of the 2018 IEEE 22nd International Conference on Intelligent Engineering Systems (INES), Las Palmas de Gran Canaria, Spain, 21–23 June 2018; pp. 193–198. [Google Scholar]
- Yu, Z.; Xu, H.; Yang, Z.; Guo, B. Personalized travel package with multi-point-of-interest recommendation based on crowdsourced user footprints. IEEE Trans.-Hum.-Mach. Syst. 2016, 46, 151–158. [Google Scholar] [CrossRef]
- Campigotto, P.; Rudloff, C.; Leodolter, M.; Bauer, D. Personalized and situation-aware multimodal route recommendations: The favour algorithm. IEEE Trans. Intell. Transp. Syst. 2017, 18, 92–102. [Google Scholar] [CrossRef] [Green Version]
- Chiang, H.-S.; Huang, T.-C. User-adapted travel planning system for personalized schedule recommendation. Inf. Fusion 2015, 21, 3–17. [Google Scholar] [CrossRef]
- Jaimes, L.G.; Vergara-Laurens, I.J.; Raij, A. A survey of incentive techniques for mobile crowd sensing. IEEE Internet Things J. 2015, 2, 370–380. [Google Scholar] [CrossRef]
- Zhu, X.; Luo, Y.; Liu, A.; Tang, W.; Ma, Z. A deep learning-based mobile crowdsensing scheme by predicting vehicle mobility. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4648–4659. [Google Scholar] [CrossRef]
- Dasari, V.S.; Kantarci, B.; Pouryazdan, M.; Foschini, L.; Girolami, M. Game theory in mobile crowdsensing: A comprehensive survey. Sensors 2020, 20, 2055. [Google Scholar] [CrossRef] [Green Version]
- Noor, R.M.; Rasyidi, N.B.G.; Nandy, T.; Kolandaisamy, R. Campus Shuttle Bus Route Optimization Using Machine Learning Predictive Analysis: A Case Study. Sustainability 2021, 13, 225. [Google Scholar] [CrossRef]
- Liu, F.; Liu, C.; Zhao, Q.; He, C. A Hybrid Teaching-Learning-Based Optimization Algorithm for the Travel Route Optimization Problem alongside the Urban Railway Line. Sustainability 2021, 13, 1408. [Google Scholar] [CrossRef]
- Pitakaso, R.; Sethanan, K.; Srijaroon, N. Modified differential evolution algorithms for multi-vehicle allocation and route optimization for employee transportation. Eng. Optim. 2020, 52, 1225–1243. [Google Scholar] [CrossRef]
- Boonsri, P.; Kaewkanha, T.; Namwiset, J.; Puntheeranurak, S. Pathly: The integrated system for finding diverse journey methods. In Proceedings of the 2016 Fifth ICT International Student Project Conference (ICT-ISPC), Nakhonpathom, Thailand, 27–28 May 2016; pp. 117–120. [Google Scholar]
- Yen, J.Y.; Vergara-Laurens; Raij, A. Finding the k shortest loopless paths in a network. Manag. Sci. 1971, 17, 712–716. [Google Scholar] [CrossRef]
- Cao, X.; Chen, L.; Cong, G.; Xiao, X. Keyword-aware optimal route search. Proc. Vldb Endow. 2012, 5, 1136–1147. [Google Scholar] [CrossRef]
- Luan, W.; Liu, G.; Jiang, C.; Zhou, M. Mptr: A maximal-marginal-relevance-based personalized trip recommendation method. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3461–3474. [Google Scholar] [CrossRef]
- Rahimi, S.M.; Far, B.; Wang, X. Behavior-based location recommendation on location-based social networks. GeoInformatica 2020, 24, 477–504. [Google Scholar] [CrossRef]
- Zhu, X.; Hao, R.; Chi, H.; Du, X. Personalized location recommendations with local feature awareness. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]
- Zhu, X.; Hao, R.; Chi, H.; Du, X. Fineroute: Personalized and time-aware route recommendation based on check-ins. IEEE Trans. Veh. Technol. 2017, 66, 10461–10469. [Google Scholar] [CrossRef]
- Kargar, M.; Lin, Z. A socially motivating and environmentally friendly tour recommendation framework for tourist groups. Expert Syst. Appl. 2021, 180, 115083. [Google Scholar] [CrossRef]
- Bao, S.; Yanagisawa, M.; Togawa, N. Personalized one-day travel with multi-nearby-landmark recommendation. In Proceedings of the 2017 IEEE 7th International Conference on Consumer Electronics, Berlin, Germany, 3–6 September 2017; pp. 239–242. [Google Scholar]
- Su, H.; Zheng, K.; Huang, J.; Jeung, H.; Chen, L.; Zhou, X. Crowdplanner: A crowd-based route recommendation system. In Proceedings of the 2014 IEEE 30th International Conference on Data Engineering, Chicago, IL, USA, 31 March–4 April 2014; pp. 1144–1155. [Google Scholar]
- Luo, W.; Tan, H.; Chen, L.; Ni, L.M. Finding time period-based most frequent path in big trajectory data. In Proceedings of the 2013 ACM SIGMOD International Conference on Management of Data, New York, NY, USA, 22–27 June 2013; pp. 713–724. [Google Scholar]
- Yao, Y.; Peng, Z.; Xiao, B. Parallel hyper-heuristic algorithm for multi-objective route planning in a smart city. IEEE Trans. Veh. Technol. 2018, 67, 10307–10318. [Google Scholar] [CrossRef]
- Beijing POI Datasets with Geographical Coordinates and Ratings. IEEE Dataport. Available online: https://ieee-dataport.org/documents/beijing-poi-datasets-geographical-coordinates-and-ratings (accessed on 29 October 2021).




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, X.; Luo, Y.; Sun, L.; Yu, Q.; Zhang, J.; Chen, S. A Novel Multi-Objective and Multi-Constraint Route Recommendation Method Based on Crowd Sensing. Appl. Sci. 2021, 11, 10497. https://0-doi-org.brum.beds.ac.uk/10.3390/app112110497
Zheng X, Luo Y, Sun L, Yu Q, Zhang J, Chen S. A Novel Multi-Objective and Multi-Constraint Route Recommendation Method Based on Crowd Sensing. Applied Sciences. 2021; 11(21):10497. https://0-doi-org.brum.beds.ac.uk/10.3390/app112110497
Chicago/Turabian StyleZheng, Xiaoyao, Yonglong Luo, Liping Sun, Qingying Yu, Ji Zhang, and Siguang Chen. 2021. "A Novel Multi-Objective and Multi-Constraint Route Recommendation Method Based on Crowd Sensing" Applied Sciences 11, no. 21: 10497. https://0-doi-org.brum.beds.ac.uk/10.3390/app112110497