
Simulation and Analysis of Grid Formation Method for UAV Clusters Based on the 3 × 3 Magic Square and the Chain Rules of Visual Reference


Abstract
:1. Introduction
- (1)
- A distributed formation method for UAVs based on the 3 × 3 magic square and the chain rules of visual reference are proposed in this work;
- (2)
- The biomimetic method is enlightened by the formation of starling flocks, and draws on the strengths of the Vicsek model and its refinements [3,46,47,48,49], overcoming the disadvantages of poor resilience and regeneration capabilities of the existing formation methods [4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45];
- (3)
- Matlab simulations and the network connectivity test revealed the strong network resilience and topological regeneration capabilities of this proposed method;
- (4)
- This proposed method will significantly improve the ability of formations to resist electromagnetic interference and destruction in the battlefield environment.
2. Relevant Formation Work
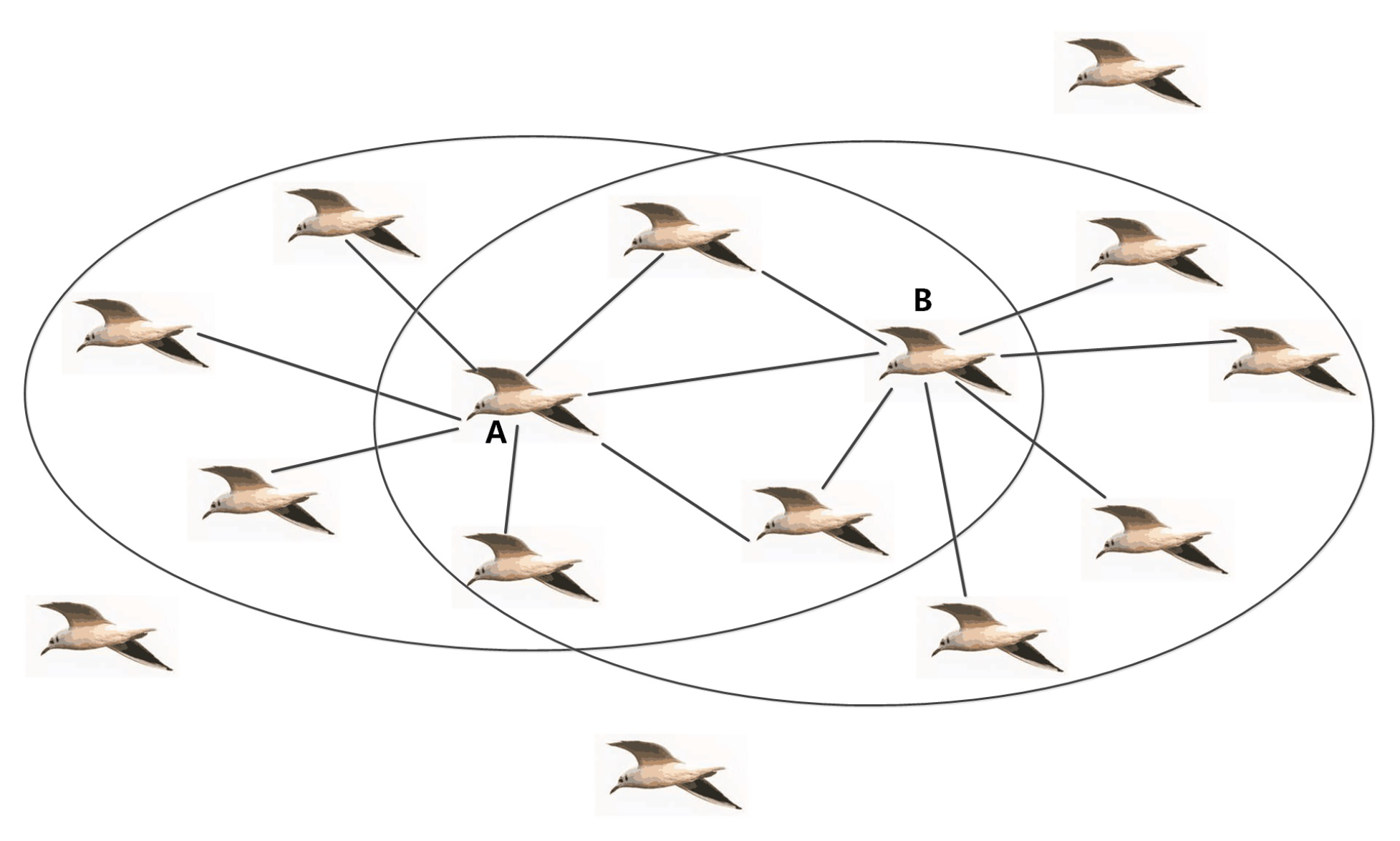
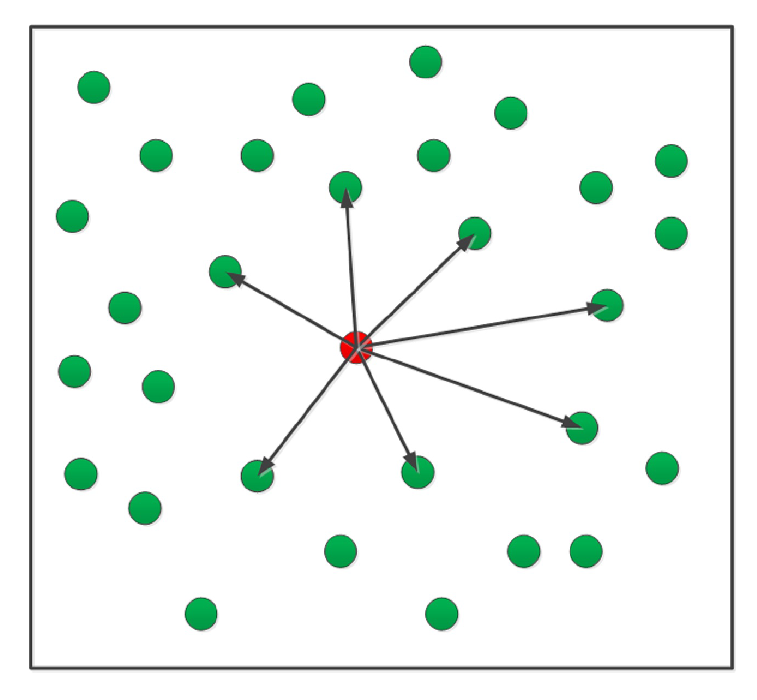
2.1. Characteristics of the Formation Mechanism of Starling Flocks
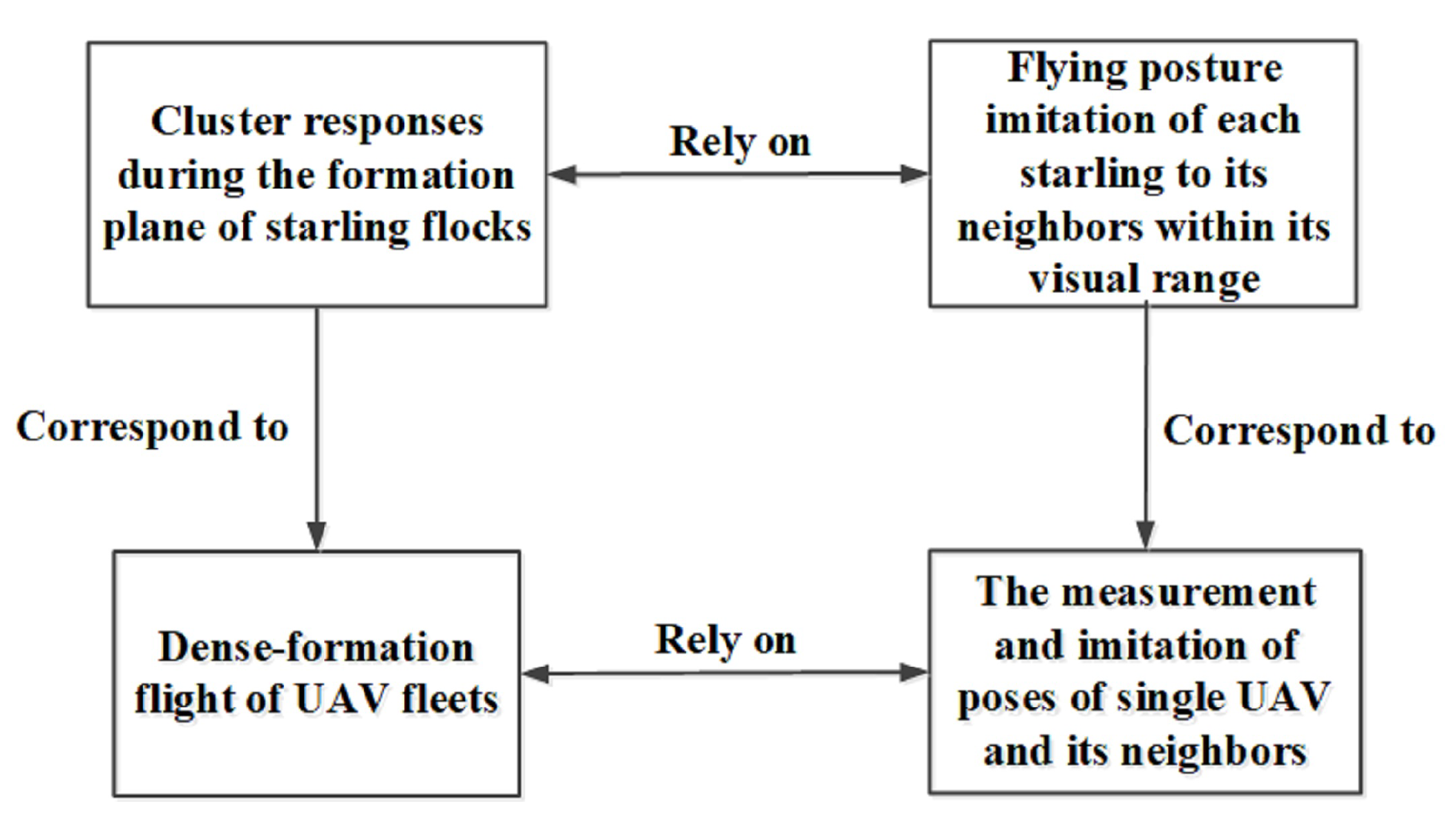
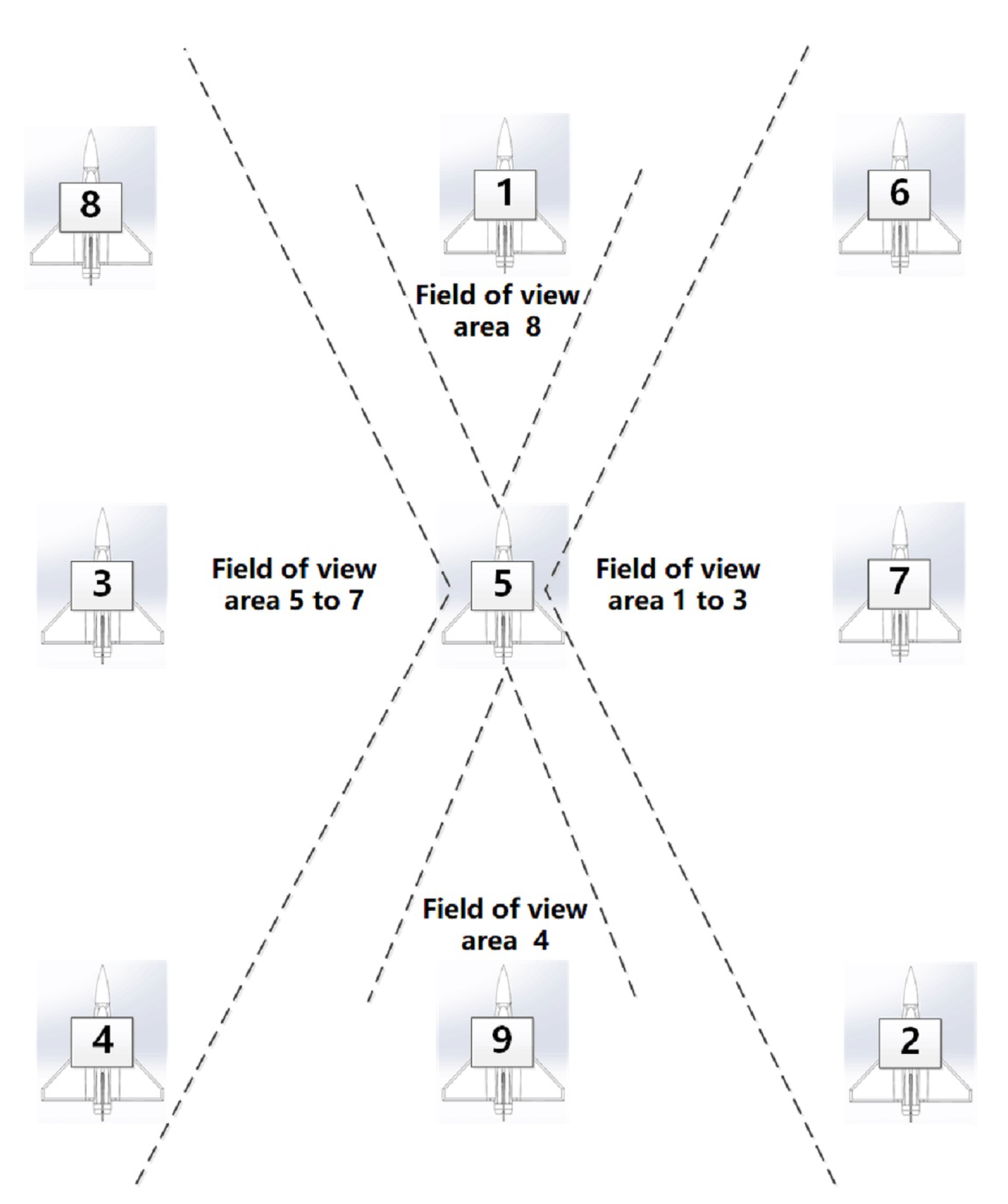
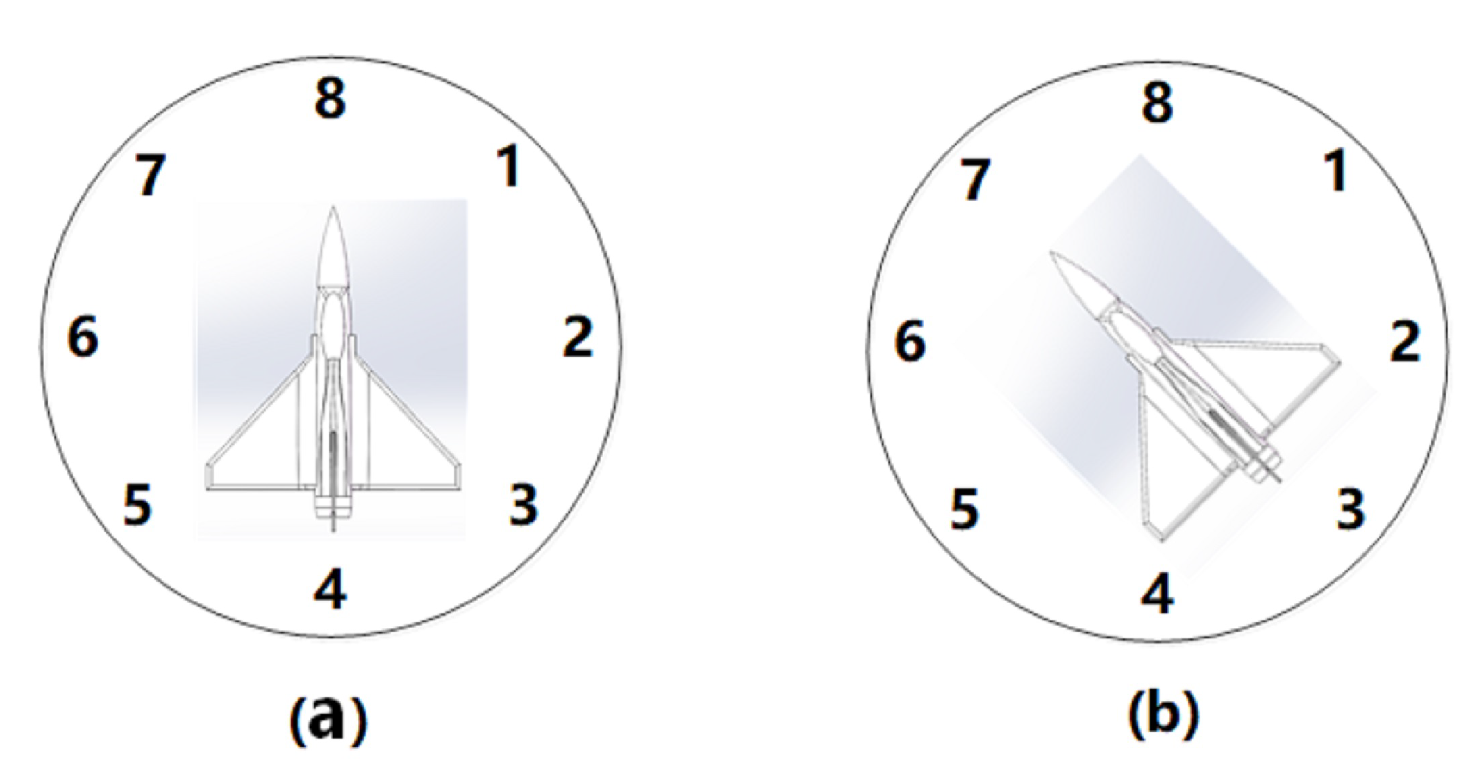
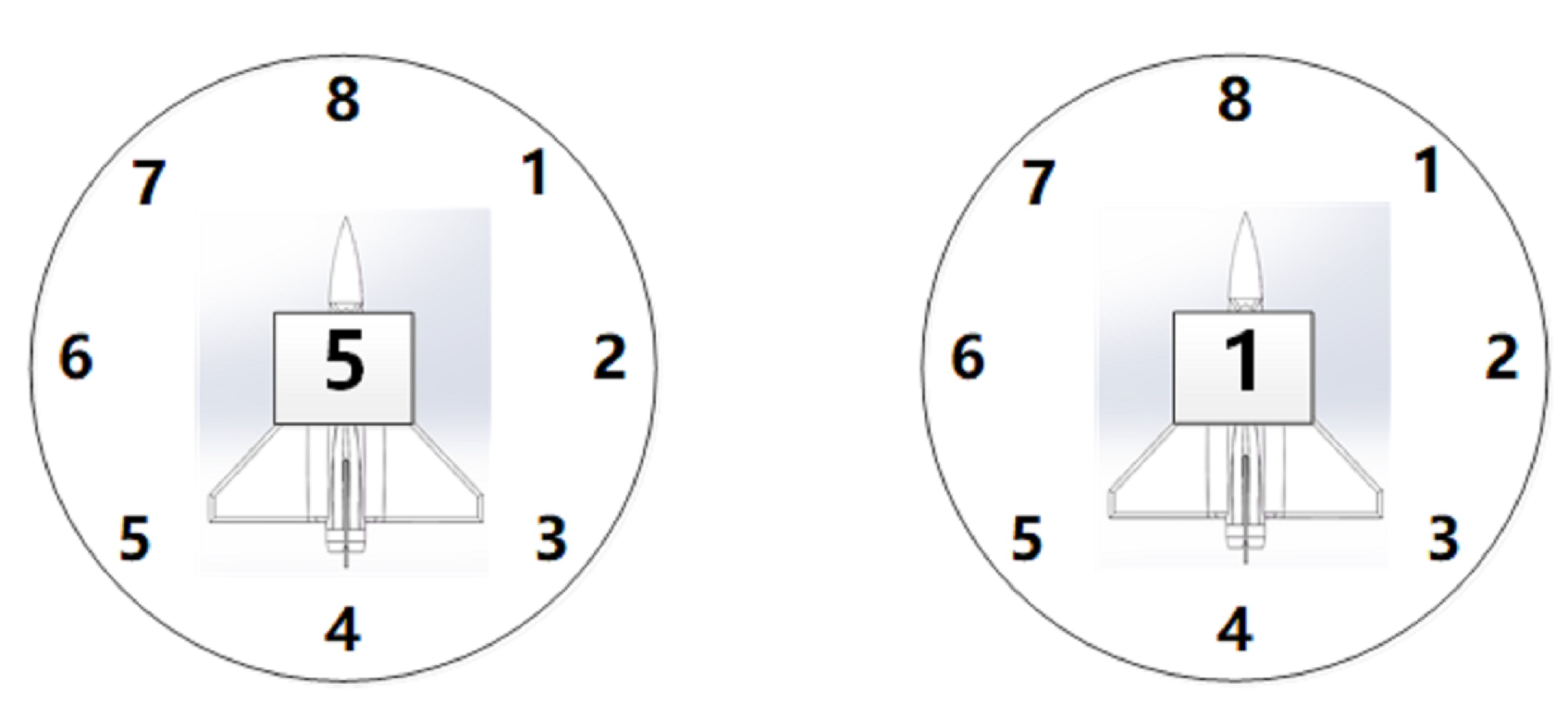
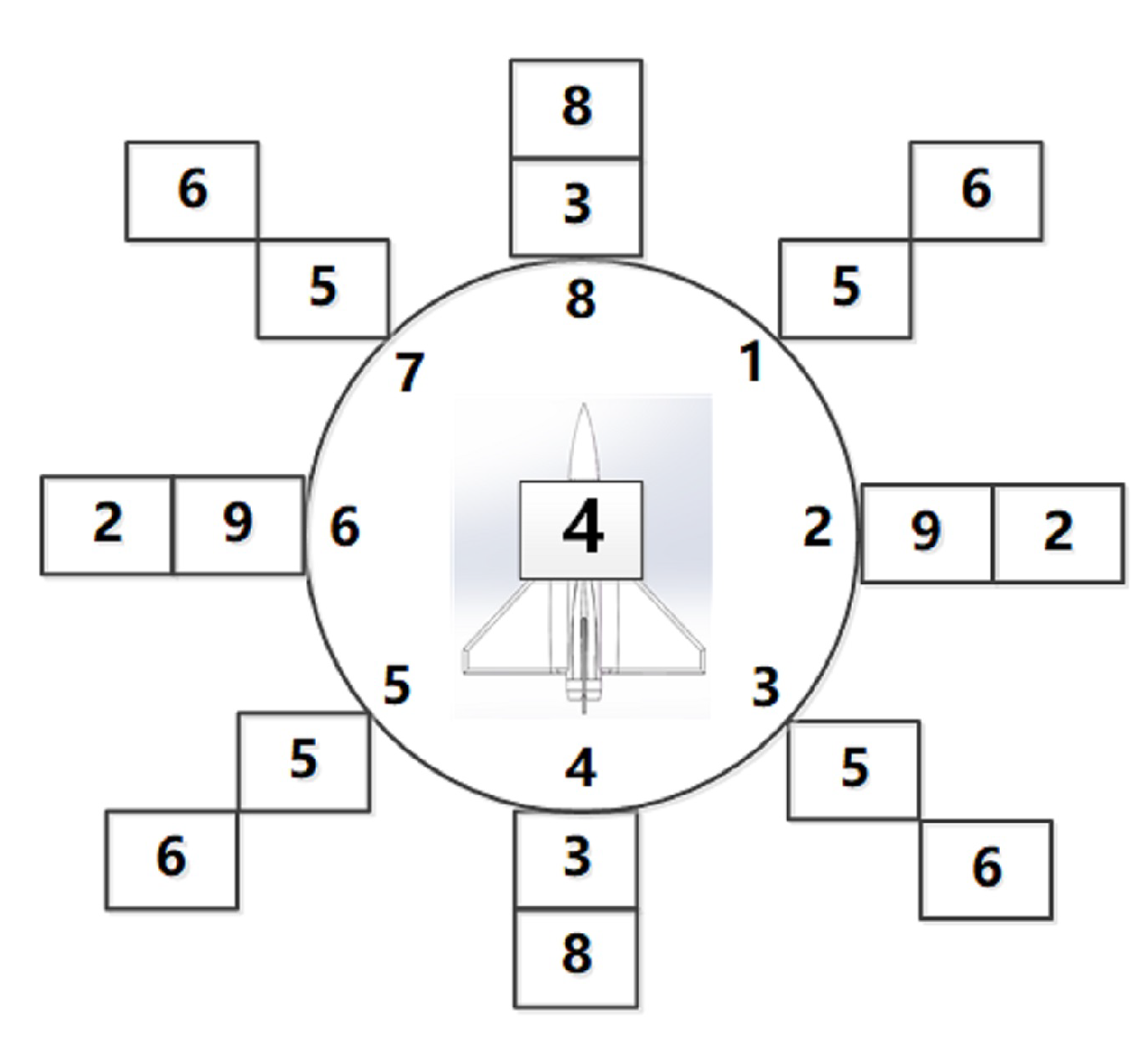
2.2. The Distribution of Visual Sensors and Cooperative Targets in UAVs Based on the Bionics of Starlings
3. Formation Methods and Simulation
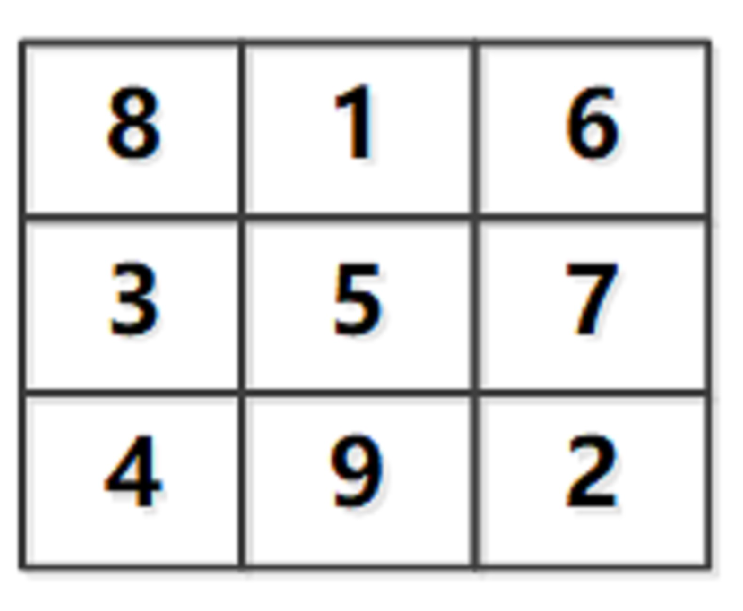
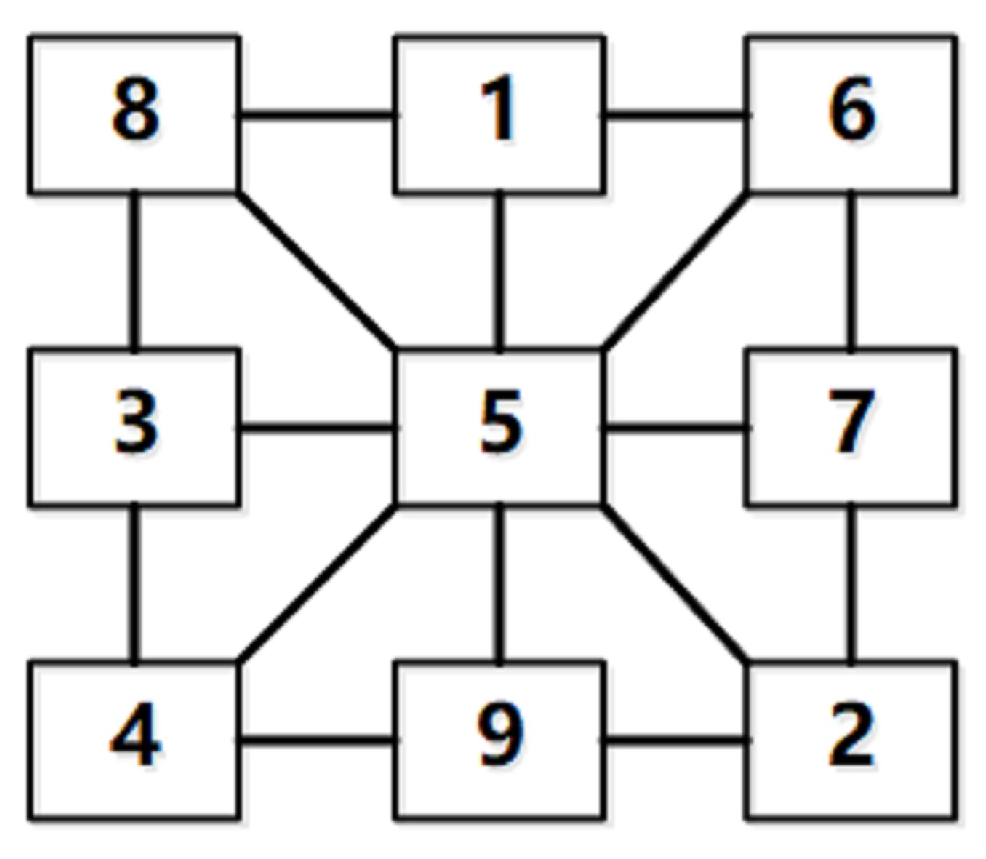
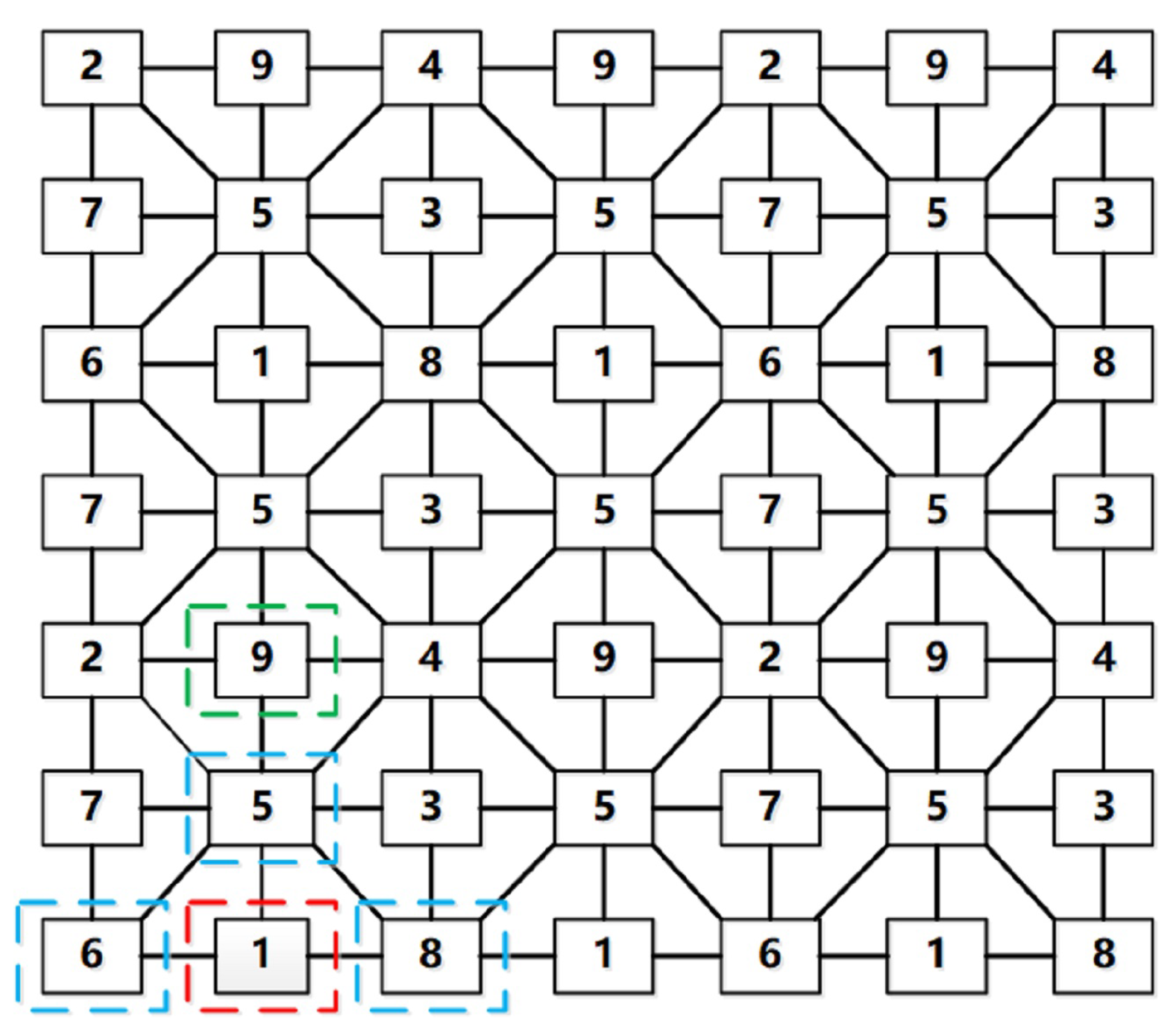
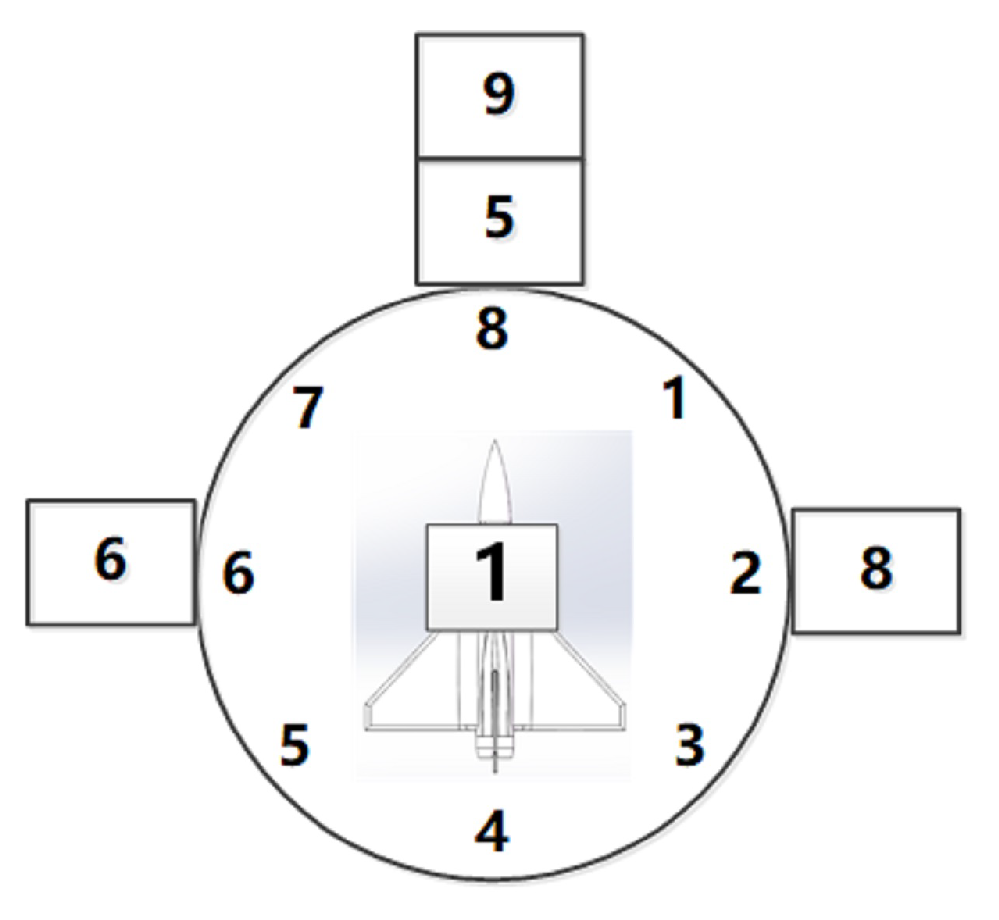
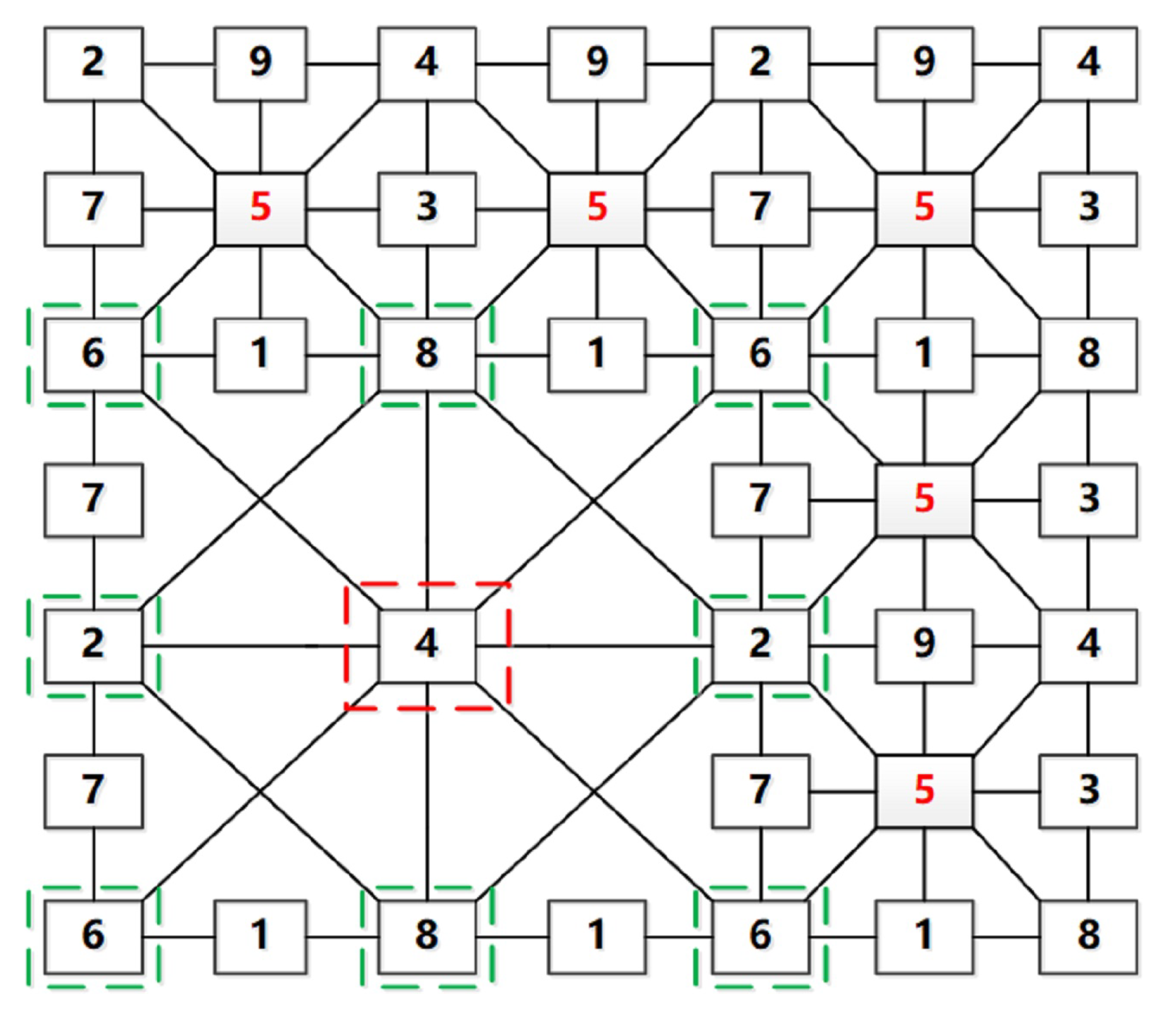
3.1. Distributed Formation Method Based on the 3 × 3 Magic Square and the Chain Rules of Visual Reference
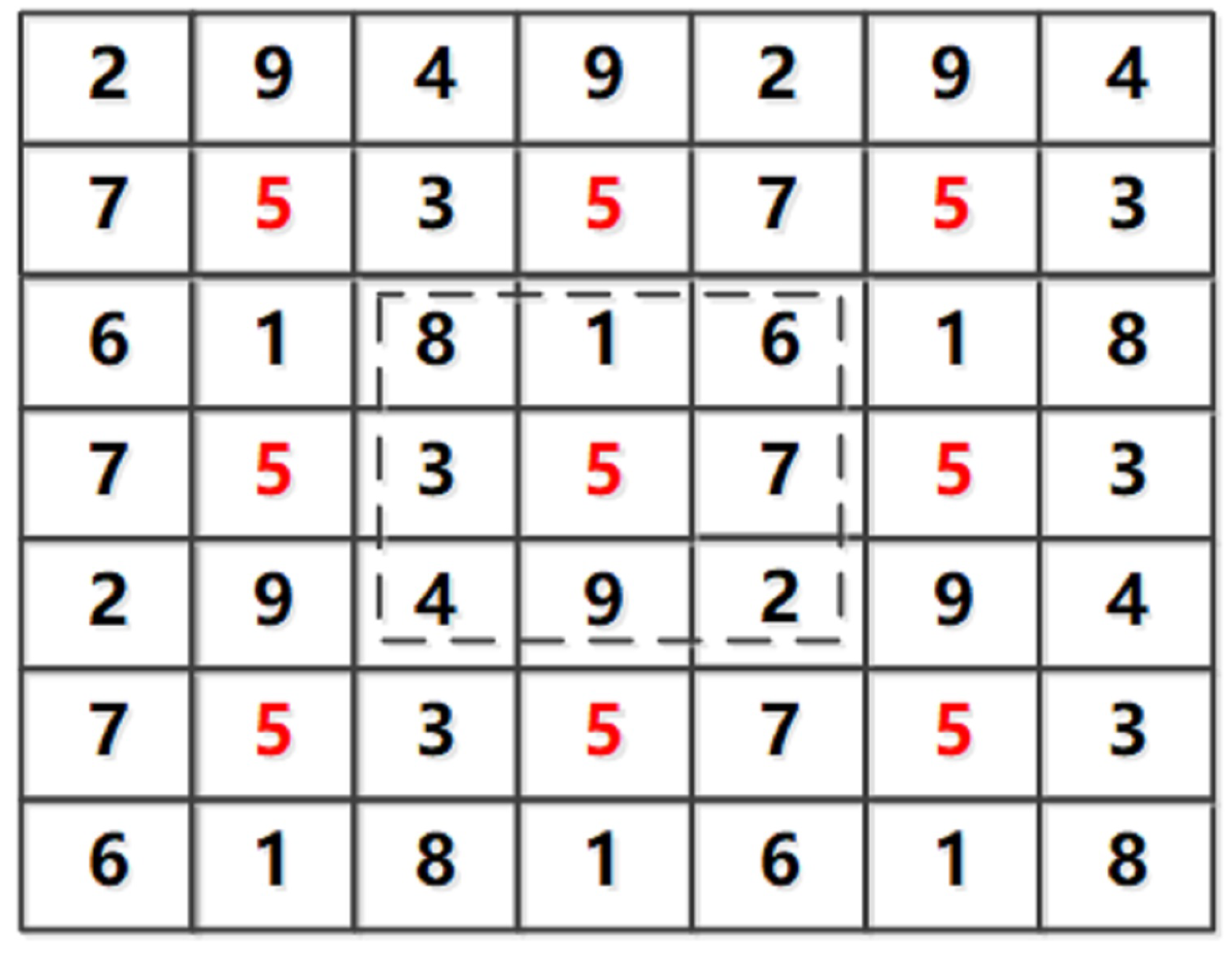
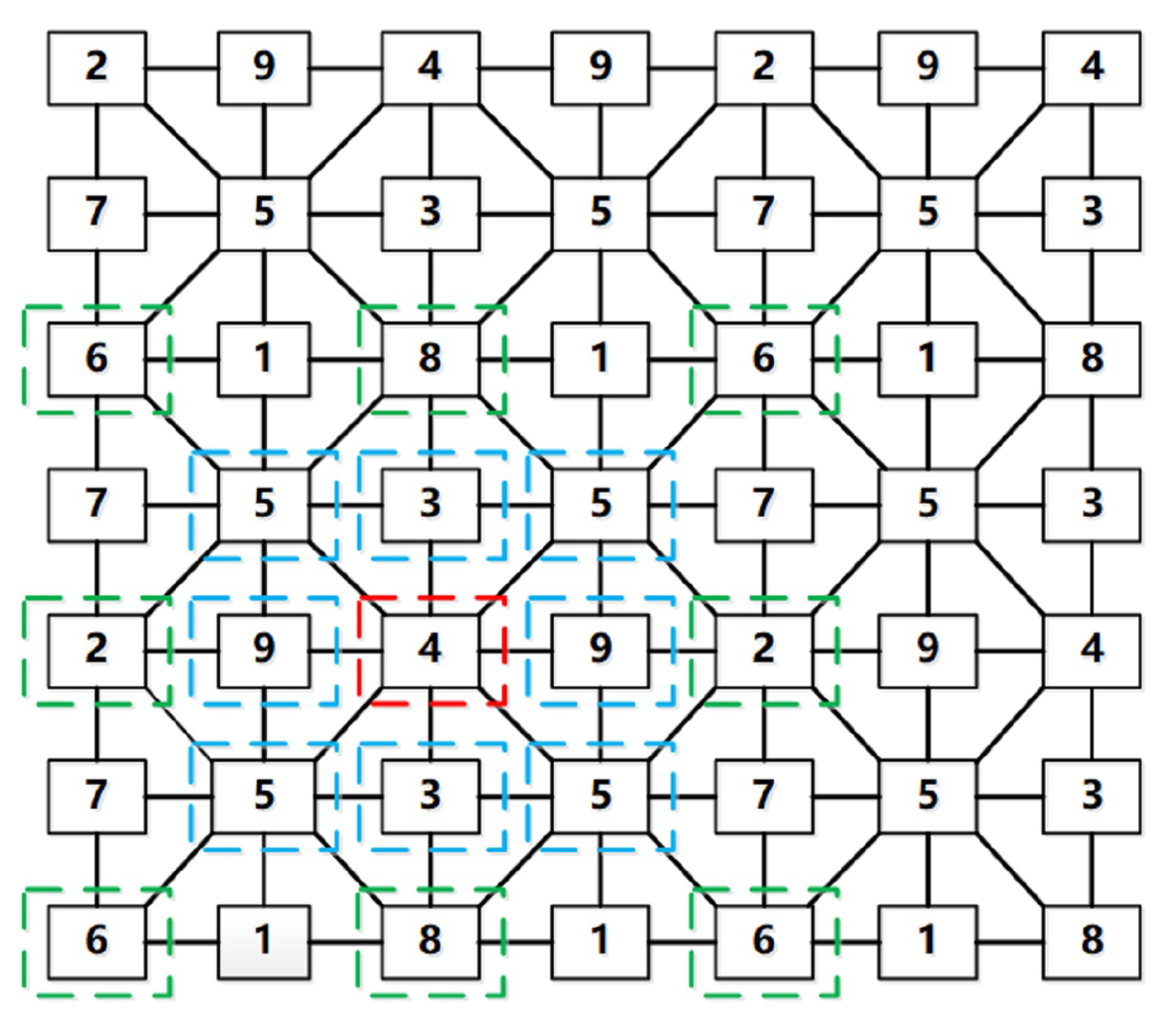
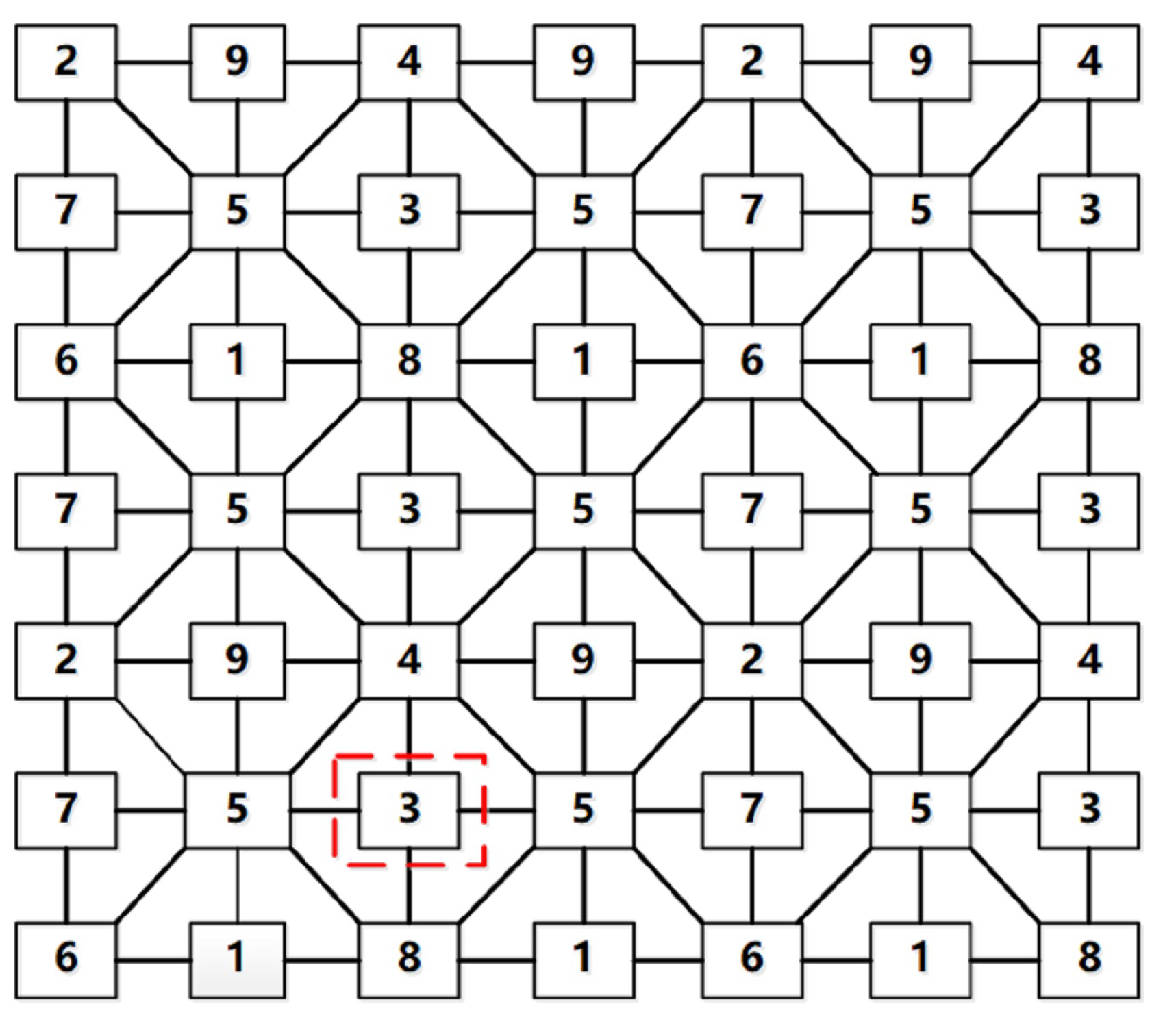
3.2. Visual Reference Topological Structure Diagram of the Nesting 3 × 3 Magic Squares
3.3. 11 × 11 Matlab Simulations of UAVs Magic Square Formation
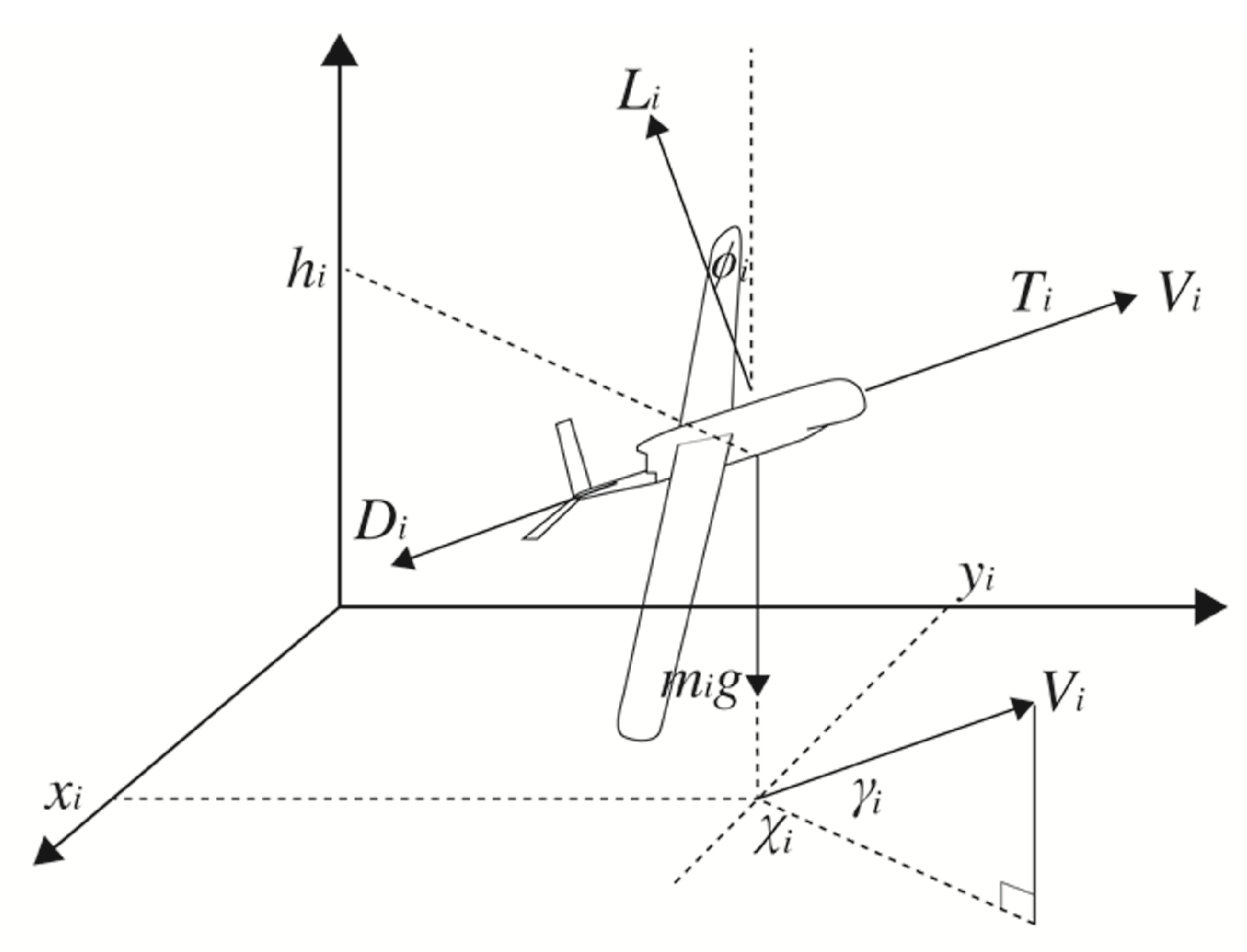
3.3.1. UAV Model
3.3.2. Design of UAV Controller
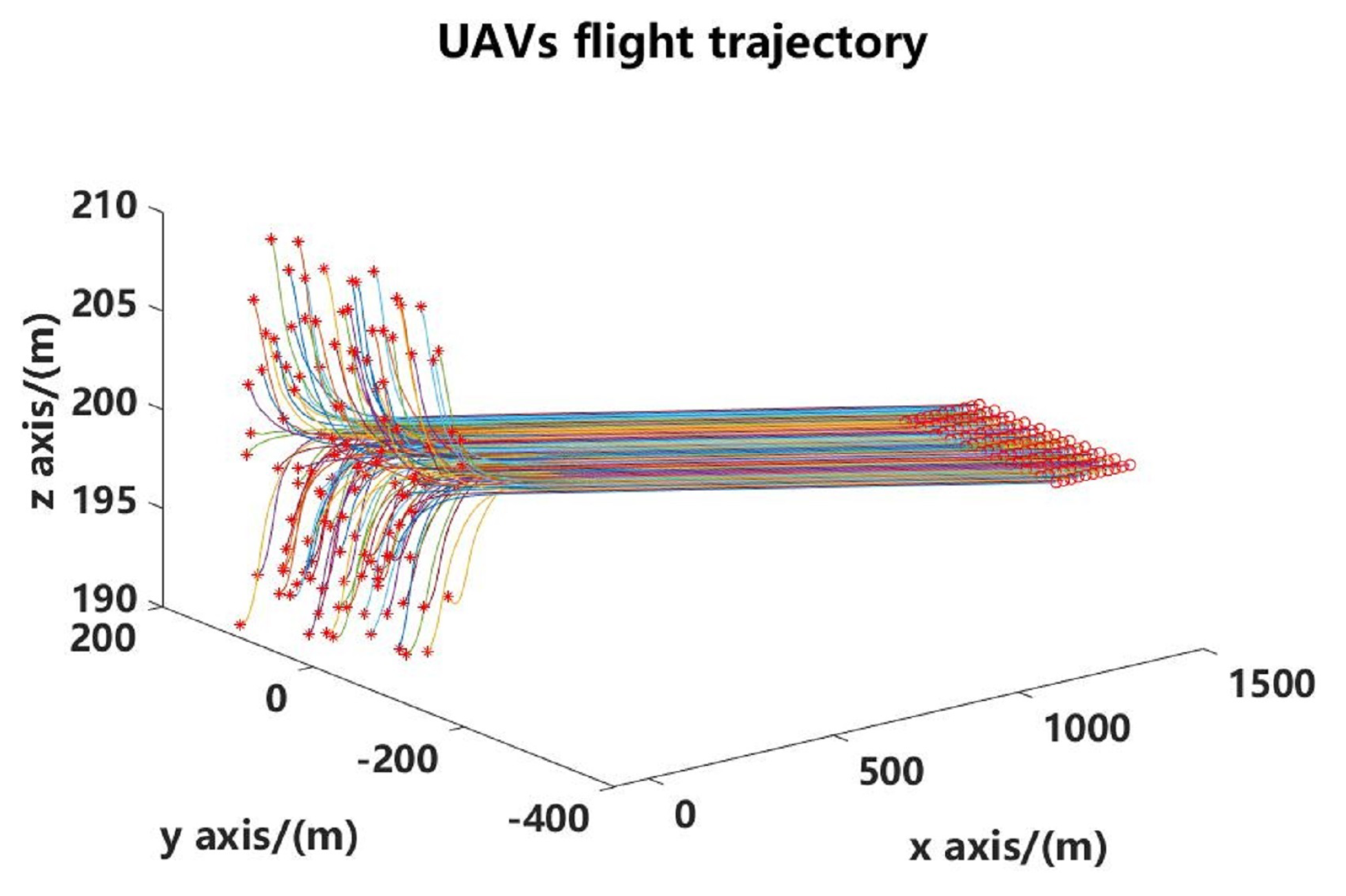
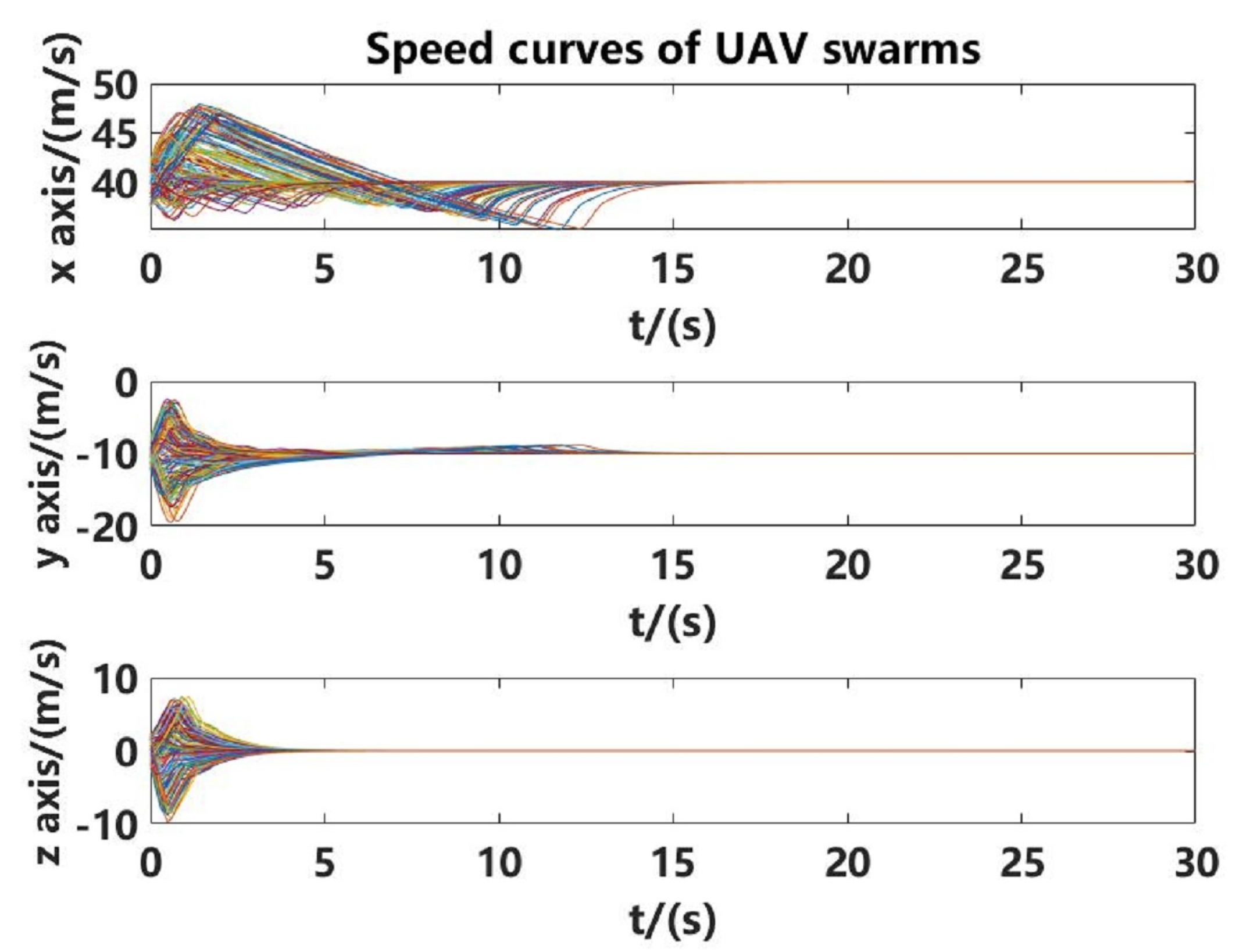
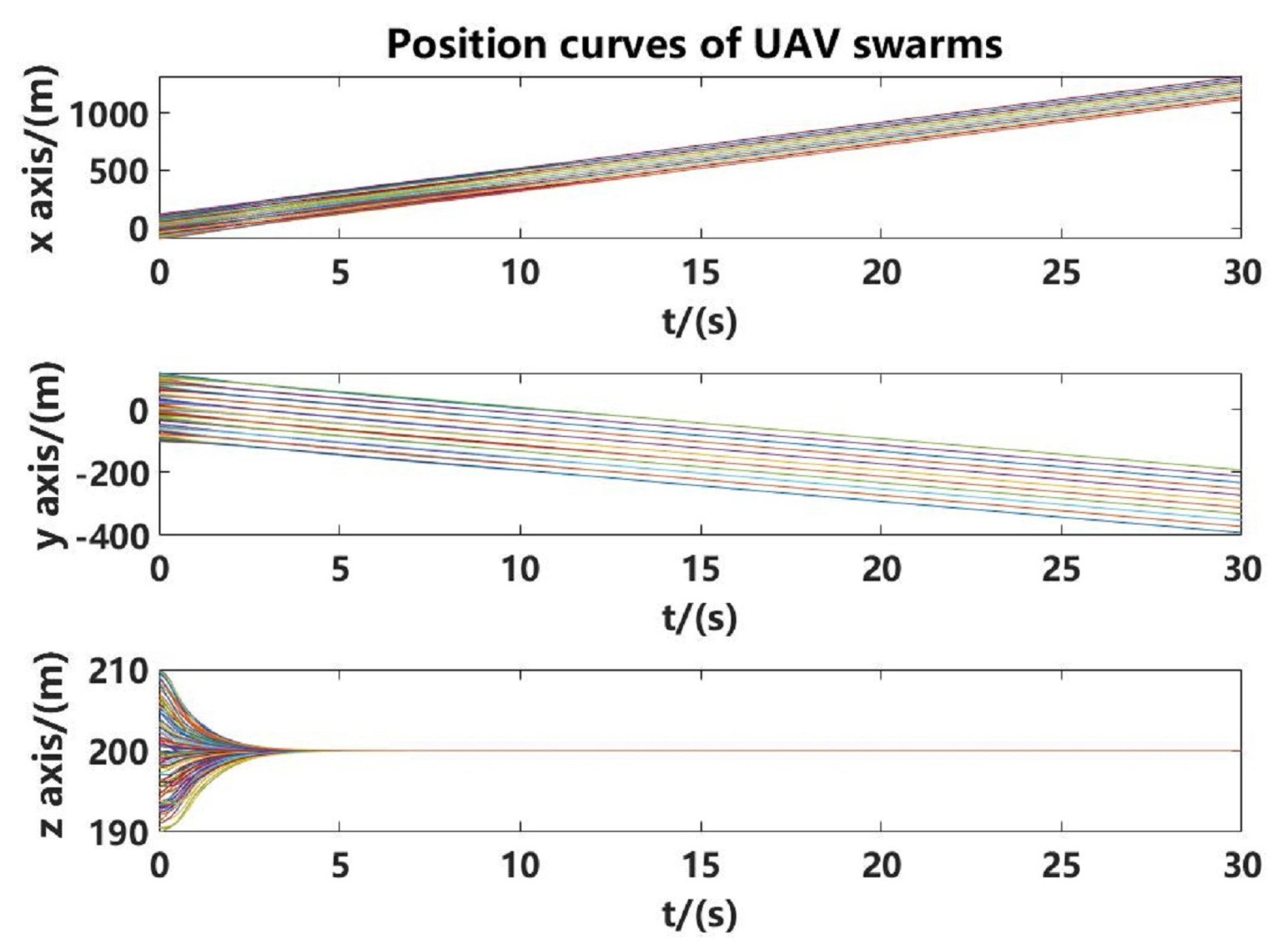
3.3.3. Simulations of Scale UAV Grid Formations
4. An Analysis on the Stability of the Visual Reference Topological Structure
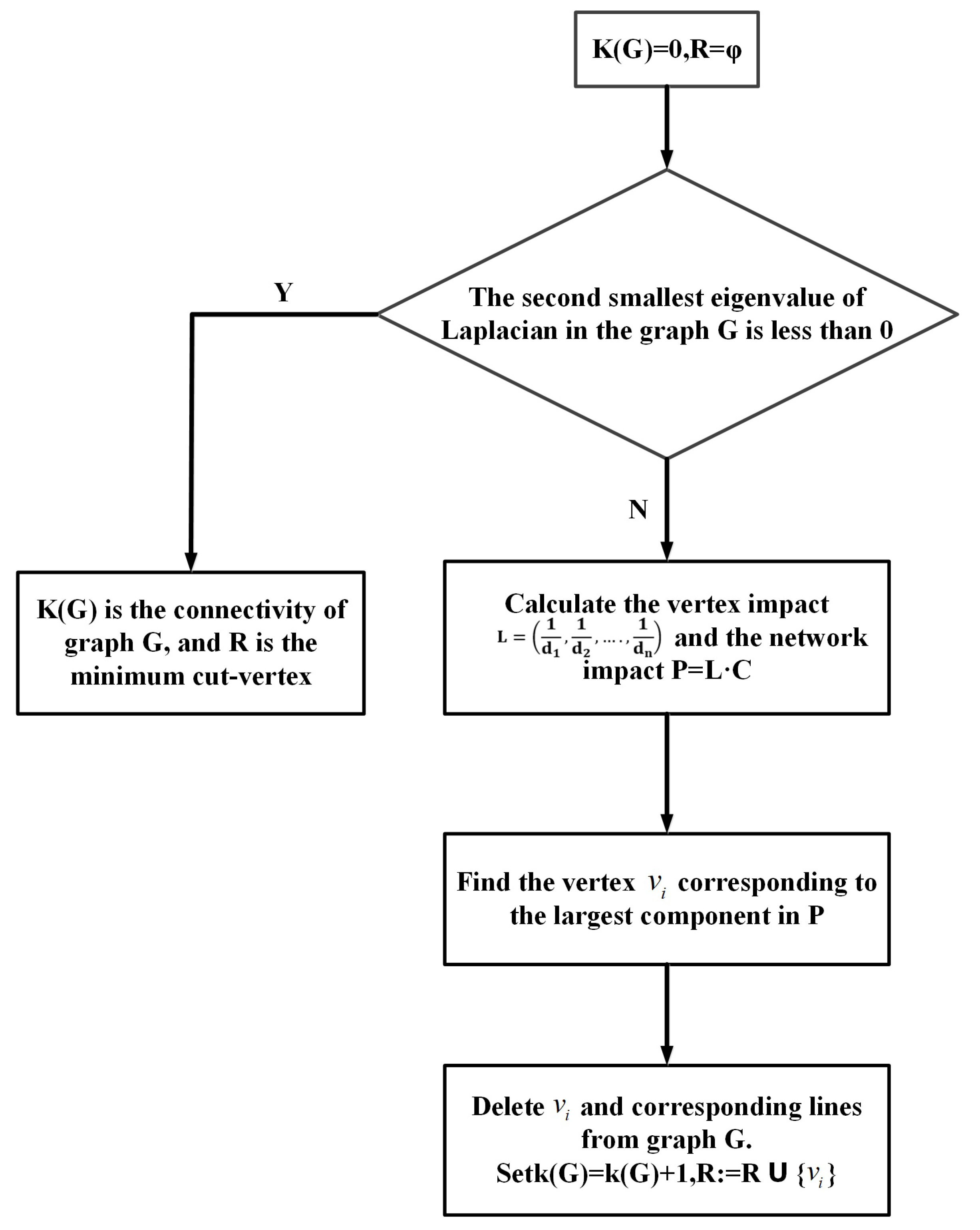
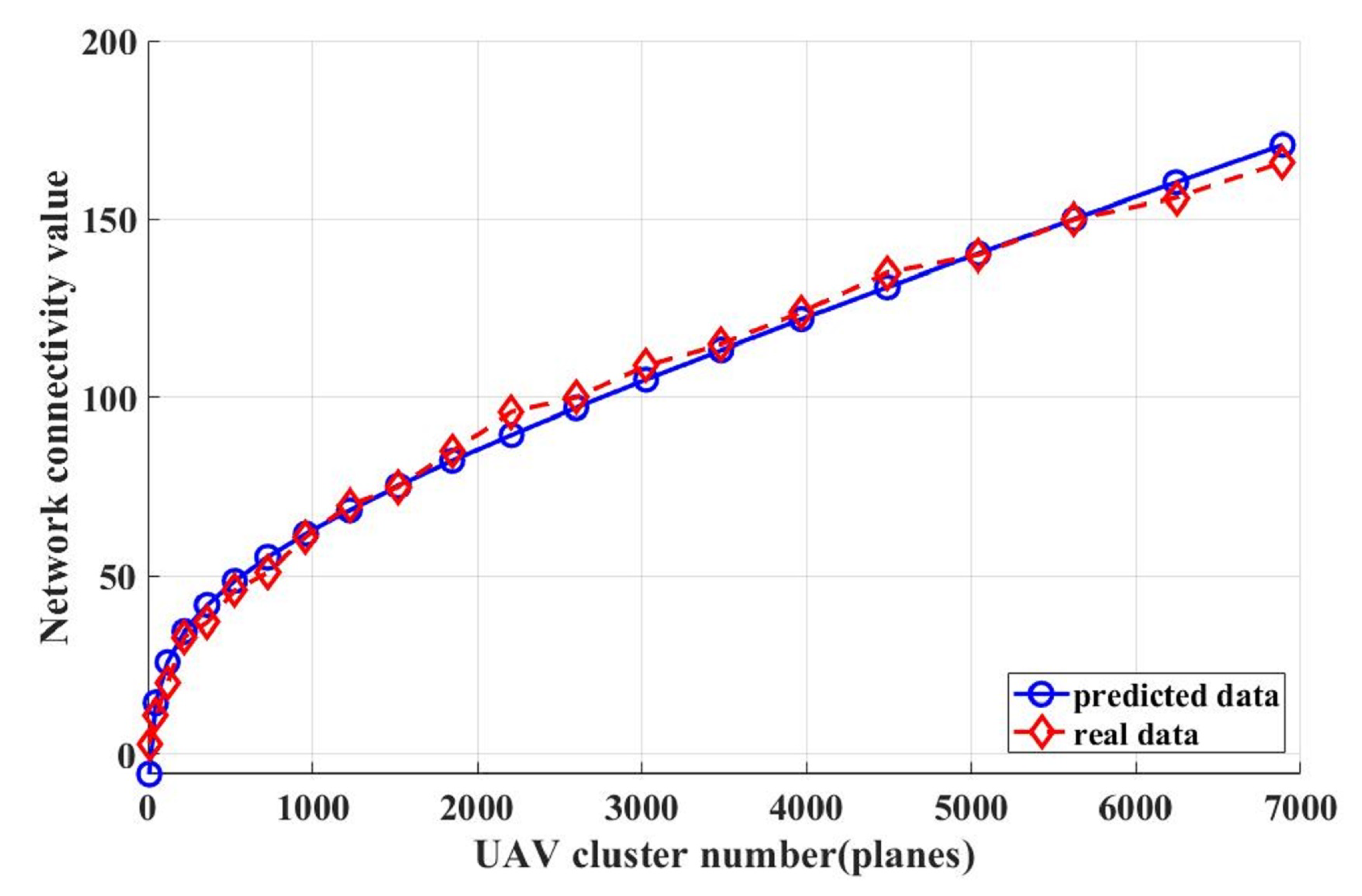
4.1. Calculation of Network Connectivity in the Undirected Topological Diagram
4.2. Matlab Simulations of Network Connectivity of Nested Magic Squares’ Topological Structure under Different-Scale UAV Formations
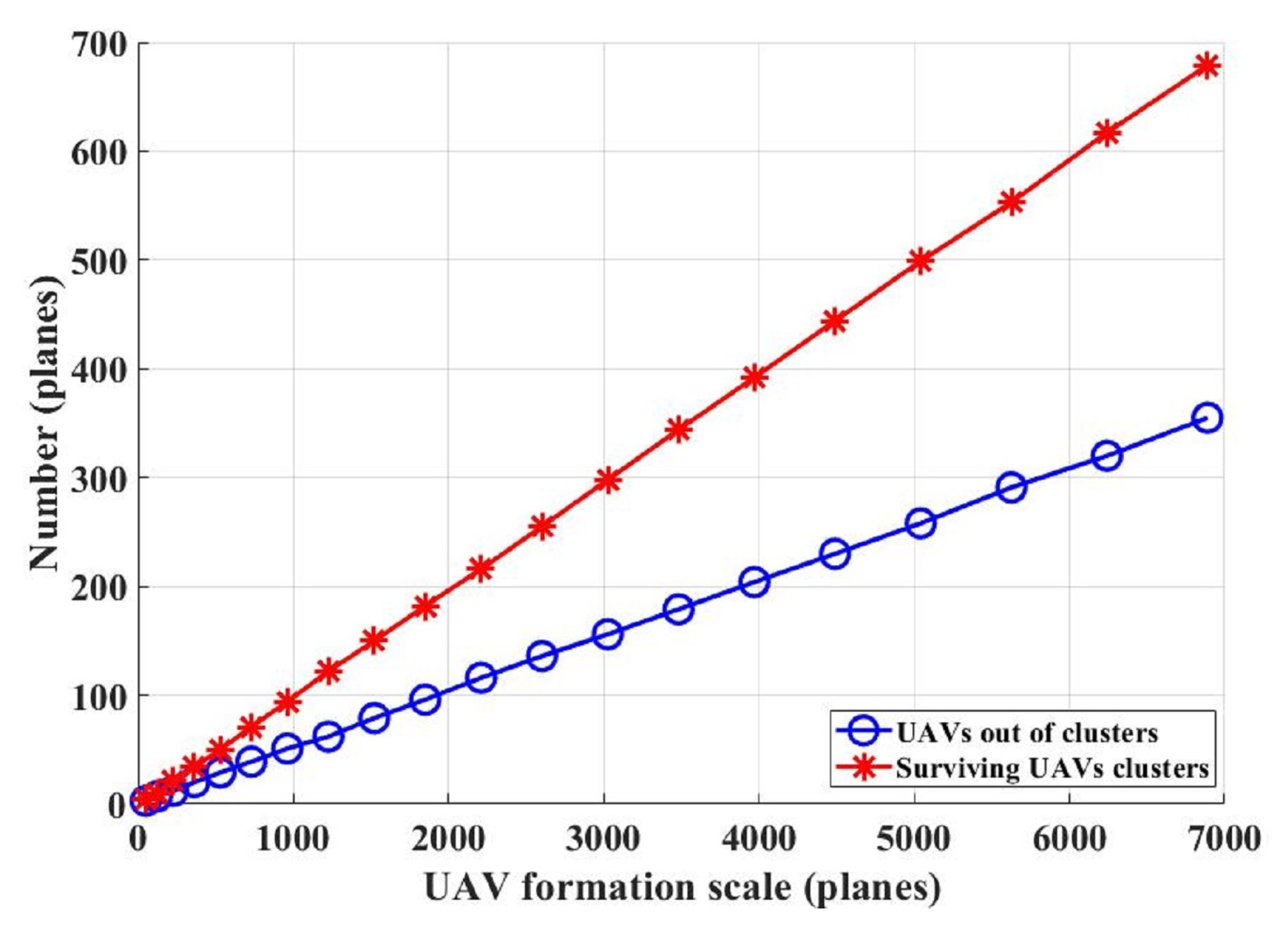
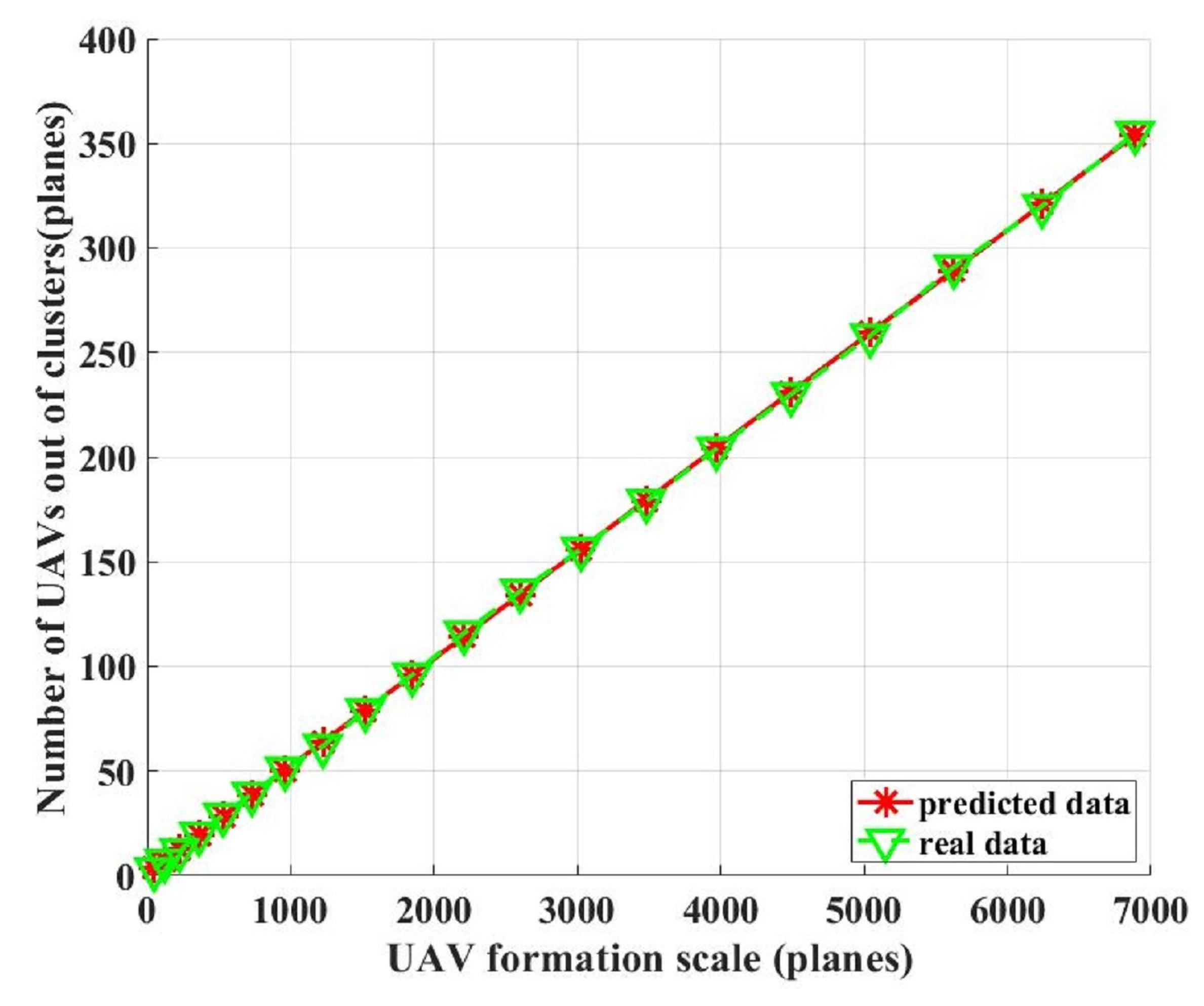
4.3. Dynamic Self-Healing of Grid Formation Based on the 3 × 3 Magic Square and the Chain Rules of Visual Reference
5. Simulations and Analysis in Battlefields
5.1. The Procedure of Matlab Simulations of UAV Formations in Battlefields
5.2. The Procedure of Matlab Simulations of UAV Formations in Battlefields
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fahey, K.; Miller, M. Unmanned Systems Integrated Roadmap 2017–2042; Office of the Secretary of Defense: Washington, DC, USA, 2018.
- Lu, J.W.; Wang, Q.-W. Review on Evolution and development of UAV. Aerodyn. Missile J. 2017, 11, 45–48, 68. [Google Scholar] [CrossRef]
- Duan, H.; Qiu, H. Unmanned Aerial Vehicle Swarm Autonomous Control Based on Swarm Intelligence, 1st ed.; Science Press: Beijing, China, 2018; p. 12. [Google Scholar]
- Desai, J.P.; Ostrowski, J.; Kumar, V. Controlling formations of multiple mobile robots. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation (Cat. No. 98CH36146), Leuven, Belgium, 20–20 May 1998; Volume 4, pp. 2864–2869. [Google Scholar] [CrossRef]
- Turpin, M.; Michael, N.; Kumar, V. Trajectory design and control for aggressive formation flight with quadrotors. Auton. Robot. 2012, 33, 143–156. [Google Scholar] [CrossRef]
- Saska, M.; Baca, T.; Thomas, J.; Chudoba, J.; Preucil, L.; Krajnik, T.; Faigl, J.; Loianno, G.; Kumar, V. System for deployment of groups of unmanned micro aerial vehicles in GPS-denied environments using onboard visual relative localization. Auton. Robot. 2017, 41, 919–944. [Google Scholar] [CrossRef] [Green Version]
- Nägeli, T.; Conte, C.; Domahidi, A.; Morari, M.; Hilliges, O. Environment-independent formation flight for micro aerial vehicles. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 1141–1146. [Google Scholar] [CrossRef] [Green Version]
- Ghamry, K.A.; Dong, Y.; Kamel, M.A.; Zhang, Y. Real-time autonomous take-off, tracking and landing of UAV on a moving UGV platform. In Proceedings of the 2016 24th Mediterranean conference on control and automation (MED), Athens, Greece, 21–24 June 2016; pp. 1236–1241. [Google Scholar] [CrossRef]
- Aghdam, A.S.; Menhaj, M.B.; Barazandeh, F.; Abdollahi, F. Cooperative load transport with movable load center of mass using multiple quadrotor UAVs. In Proceedings of the 2016 4th International Conference on Control, Instrumentation, and Automation (ICCIA), Qazvin, Iran, 27–28 January 2016; pp. 23–27. [Google Scholar] [CrossRef]
- Liu, H.; Wang, X.; Zhu, H. A novel backstepping method for the three-dimensional multi-UAVs formation control. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2015; pp. 923–928. [Google Scholar] [CrossRef]
- Reif, J.H.; Wang, H. Social potential fields: A distributed behavioral control for autonomous robots. Robot. Auton. Syst. 1999, 27, 171–194. [Google Scholar] [CrossRef]
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. Control 2003, 48, 988–1001. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Kim, Y.; Tsourdos, A. Optimized behavioural UAV formation flight controller design. In Proceedings of the 2009 European Control Conference (ECC), Budapest, Hungary, 23–26 August 2009; pp. 4973–4978. [Google Scholar] [CrossRef]
- Song, Y.Z.; Yang, F.F. On Formation Control Based on Behavior For Second-order Multi-agent System. Control Eng. China 2012, 19, 687–690. [Google Scholar] [CrossRef]
- Shin, J.; Kim, S.; Suk, J. Development of robust flocking control law for multiple UAVs using behavioral decentralized method. J. Korean Soc. Aeronaut. Space Sci. 2015, 43, 859–867. [Google Scholar] [CrossRef] [Green Version]
- Qiu, H.-X.; Duan, H.-B.; Fan, Y.-M. Multiple unmanned aerial vehicle autonomous formation based on the behavior mechanism in pigeon flocks. Control Theory Appl. 2015, 32, 1298–1304. [Google Scholar] [CrossRef]
- Lewis, M.A.; Tan, K.H. High precision formation control of mobile robots using virtual structures. Auton. Robot. 1997, 4, 387–403. [Google Scholar] [CrossRef]
- Beard, R.W.; Lawton, J.; Hadaegh, F.Y. A coordination architecture for spacecraft formation control. IEEE Trans. Control Syst. Technol. 2001, 9, 777–790. [Google Scholar] [CrossRef] [Green Version]
- Olfati-Saber, R.; Murray, R.M. Distributed structural stabilization and tracking for formations of dynamic multi-agents. In Proceedings of the 2002 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002; Volume 1, pp. 209–215. [Google Scholar] [CrossRef] [Green Version]
- Ren, W.; Beard, R.W. Formation feedback control for multiple spacecraft via virtual structures. IEE Proc.-Control Theory Appl. 2004, 151, 357–368. [Google Scholar] [CrossRef] [Green Version]
- Ren, W.; Beard, R.W. Decentralized scheme for spacecraft formation flying via the virtual structure approach. J. Guid. Control Dyn. 2004, 27, 73–82. [Google Scholar] [CrossRef]
- Yang, E.; Masuko, Y.; Mita, T. Dual controller approach to three-dimensional autonomous formation control. J. Guid. Control Dyn. 2004, 27, 336–346. [Google Scholar] [CrossRef]
- Lalish, E.; Morgansen, K.A.; Tsukamaki, T. Formation tracking control using virtual structures and deconfliction. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 5699–5705. [Google Scholar] [CrossRef]
- Li, N.H.; Liu, H.H. Formation UAV flight control using virtual structure and motion synchronization. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 1782–1787. [Google Scholar] [CrossRef]
- Cai, D.; Sun, J.; Wu, S. AsiaSim 2012: UAVs Formation Flight Control Based on Behavior and Virtual Structure; Xiao, T., Zhang, L., Fei, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 429–438. [Google Scholar] [CrossRef]
- Askari, A.; Mortazavi, M.; Talebi, H. UAV formation control via the virtual structure approach. J. Aerosp. Eng. 2015, 28, 04014047. [Google Scholar] [CrossRef]
- Laman, G. On graphs and rigidity of plane skeletal structures. J. Eng. Math. 1970, 4, 331–340. [Google Scholar] [CrossRef]
- Hendrickx, J.M.; Anderson, B.D.; Delvenne, J.C.; Blondel, V.D. Directed graphs for the analysis of rigidity and persistence in autonomous agent systems. Int. J. Robust Nonlinear Control IFAC-Affil. J. 2007, 17, 960–981. [Google Scholar] [CrossRef]
- Barca, J.C.; Sekercioglu, A.; Ford, A. Controlling Formations of Robots with Graph Theory. In Intelligent Autonomous Systems 12; Lee, S., Cho, H., Yoon, K.J., Lee, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 563–574. [Google Scholar] [CrossRef]
- Zhang, P.; de Queiroz, M.; Cai, X. Three-Dimensional Dynamic Formation Control of Multi-Agent Systems Using Rigid Graphs. J. Dyn. Syst. Meas. Control 2015, 137, 111006. [Google Scholar] [CrossRef]
- Ramazani, S.; Selmic, R.; De Queiroz, M. Multiagent layered formation control based on rigid graph theory. In Control of Complex Systems; Elsevier: Amsterdam, The Netherlands, 2016; pp. 397–419. [Google Scholar] [CrossRef]
- Luo, X.Y.; Shao, S.K.; Zhang, Y.Y.; Li, S.B.; Guan, X.P.; Liu, Z.X. Generation of minimally persistent circle formation for a multi-agent system. Chin. Phys. B 2014, 23, 614–622. [Google Scholar] [CrossRef]
- Li, S.; Shao, S.-K.; Guan, X.-P.; Zhao, Y.-J. Dynamic generation and control of optimally persistent formation for multi-agent systems. Acta Autom. Sin. 2013, 39, 1431–1438. [Google Scholar] [CrossRef]
- Murray, R.M.; Olfati-Saber, R. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 2004, 49, 1520–1533. [Google Scholar] [CrossRef] [Green Version]
- Ren, W.; Beard, R.W.; McLain, T.W. Coordination Variables and Consensus Building in Multiple Vehicle Systems. In Cooperative Control: A Post-Workshop Volume 2003 Block Island Workshop on Cooperative Control; Kumar, V., Leonard, N., Morse, A.S., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 171–188. [Google Scholar] [CrossRef] [Green Version]
- Ren, W.; Beard, R.W. Consensus of information under dynamically changing interaction topologies. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; Volume 6, pp. 4939–4944. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W.; Atkins, E.M. Information consensus in multivehicle cooperative control. IEEE Control Syst. Mag. 2007, 27, 71–82. [Google Scholar] [CrossRef]
- Seo, J.; Ahn, C.; Kim, Y. Controller Design for UAV Formation Flight Using Consensus Based Decentralized Approach. In Proceedings of the AIAA Infotech@Aerospace Conference, Seattle, WA, USA, 6–9 April 2009; pp. 1–11. [Google Scholar] [CrossRef] [Green Version]
- Jamshidi, M.; Gomez, J.; Jaimes, B.; Aldo, S. Intelligent control of UAVs for consensus-based and network controlled applications. Appl. Comput. Math. 2011, 10, 35–64. [Google Scholar]
- Kuriki, Y.; Namerikawa, T. Consensus-based cooperative formation control with collision avoidance for a multi-UAV system. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 2077–2082. [Google Scholar] [CrossRef]
- Kuriki, Y.; Namerikawa, T. Formation control with collision avoidance for a multi-UAV system using decentralized MPC and consensus-based control. SICE J. Control Meas. Syst. Integr. 2015, 8, 285–294. [Google Scholar] [CrossRef]
- Li, S.; Wang, X. Finite-time consensus and collision avoidance control algorithms for multiple AUVs. Automatica 2013, 49, 3359–3367. [Google Scholar] [CrossRef]
- Xing, G.-S.; Du, C.-Y.; Zong, Q.; Chen, H.-Y. Consensus-based distributed motion planning for autonomous formation of miniature quadrotor groups. Control Decis. 2014, 29, 2081–2084. [Google Scholar] [CrossRef]
- Zong, Q.; Shao, S. Decentralized finite-time attitude synchronization for multiple rigid spacecraft via a novel disturbance observer. ISA Trans. 2016, 65, 150–163. [Google Scholar] [CrossRef]
- Kownacki, C. Multi-UAV Flight using Virtual Structure Combined with Behavioral Approach. Acta Mech. Autom. 2016, 10, 92–99. [Google Scholar] [CrossRef] [Green Version]
- Vicsek, T.; Czirók, A.; Ben-Jacob, E.; Cohen, I.; Shochet, O. Novel type of phase transition in a system of self-driven particles. Phys. Rev. Lett. 1995, 75, 1226–1229. [Google Scholar] [CrossRef] [Green Version]
- Czirók, A.; Vicsek, M.; Vicsek, T. Collective motion of organisms in three dimensions. Phys. A Stat. Mech. Its Appl. 1999, 264, 299–304. [Google Scholar] [CrossRef] [Green Version]
- Tian, B.M.; Yang, H.X.; Li, W.; Wang, W.X.; Wang, B.H.; Zhou, T. Optimal view angle in collective dynamics of self-propelled agents. Phys. Rev. E 2009, 79, 052102. [Google Scholar] [CrossRef] [Green Version]
- Calvao, A.M.; Brigatti, E. The role of neighbours selection on cohesion and order of swarms. PLoS ONE 2014, 9, e94221. [Google Scholar] [CrossRef] [Green Version]
- Ballerini, M.; Cabibbo, N.; Candelier, R.; Cavagna, A.; Cisbani, E.; Giardina, I.; Lecomte, V.; Orlandi, A.; Parisi, G.; Procaccini, A.; et al. Interaction ruling animal collective behavior depends on topological rather than metric distance: Evidence from a field study. Proc. Natl. Acad. Sci. USA 2008, 105, 1232–1237. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cavagna, A.; Cimarelli, A.; Giardina, I.; Parisi, G.; Santagati, R.; Stefanini, F.; Viale, M. Scale-free correlations in starling flocks. Proc. Natl. Acad. Sci. USA 2010, 107, 11865–11870. [Google Scholar] [CrossRef] [Green Version]
- Young, G.F.; Scardovi, L.; Cavagna, A.; Giardina, I.; Leonard, N.E. Starling flock networks manage uncertainty in consensus at low cost. PLoS Comput. Biol. 2013, 9, e1002894. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sun, X.-J.; Liu, S.-Y.; Wang, Z.-Q. New algorithm for solving connectivity of networks. Comput. Eng. Appl. 2009, 45, 82–84. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Unit |
|---|---|---|
| 20 | kg | |
| g | 9.81 | kg/m |
| 1.225 | kg/m | |
| S | 1.37 | m |
| 0.02 | Non-dimensional | |
| 0.1 | Non-dimensional | |
| 1 | Non-dimensional | |
| 4 | m/s (at m) | |
| N | ||
| N | ||
| N | ||
| deg | ||
| deg |
| UAV Cluster Number | Network Connectivity Value |
|---|---|
| 9 | 3 |
| 49 | 11 |
| 121 | 20 |
| 225 | 33 |
| 361 | 37 |
| 529 | 46 |
| 729 | 51 |
| 961 | 61 |
| 1225 | 70 |
| 1521 | 75 |
| 1849 | 85 |
| 2209 | 96 |
| 2601 | 100 |
| 3025 | 109 |
| 3481 | 115 |
| 3969 | 124 |
| 4489 | 135 |
| 5041 | 140 |
| 5625 | 150 |
| 6241 | 156 |
| 6889 | 166 |
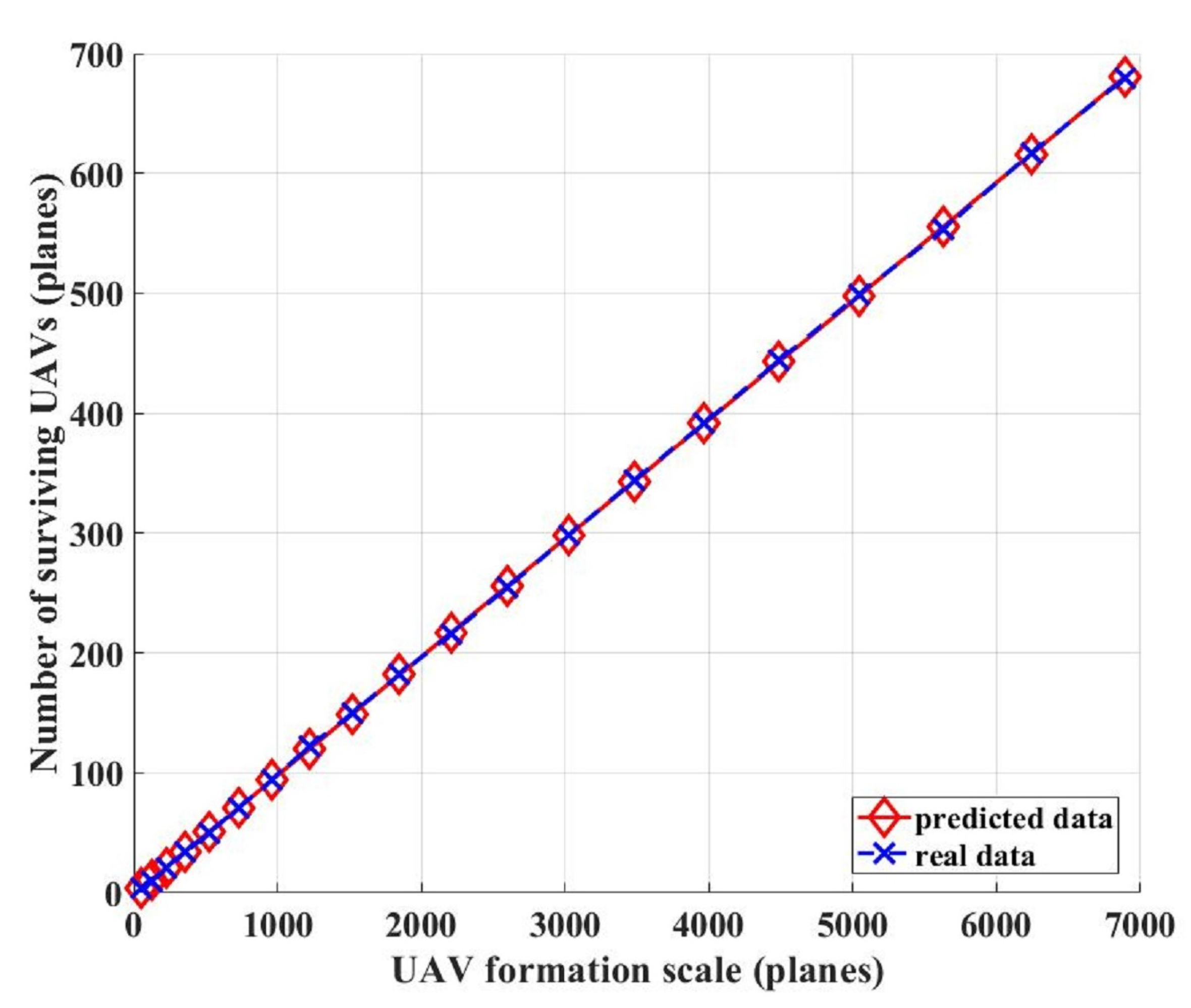
| UAV Formation Scale (Planes) | UAVs Out of Clusters (Planes) | Surviving UAV Clusters (Planes) |
|---|---|---|
| 49 | 3 | 4 |
| 121 | 7 | 10 |
| 225 | 12 | 21 |
| 361 | 20 | 34 |
| 529 | 29 | 50 |
| 729 | 39 | 71 |
| 961 | 51 | 94 |
| 1225 | 62 | 122 |
| 1521 | 79 | 150 |
| 1849 | 96 | 182 |
| 2209 | 116 | 216 |
| 2601 | 136 | 255 |
| 3025 | 156 | 298 |
| 3481 | 179 | 344 |
| 3969 | 204 | 392 |
| 4489 | 230 | 444 |
| 5041 | 258 | 499 |
| 5625 | 291 | 553 |
| 6241 | 320 | 617 |
| 6889 | 355 | 679 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, R.; Xu, G.; Cheng, Y.; Ye, Z.; Huang, J. Simulation and Analysis of Grid Formation Method for UAV Clusters Based on the 3 × 3 Magic Square and the Chain Rules of Visual Reference. Appl. Sci. 2021, 11, 11560. https://0-doi-org.brum.beds.ac.uk/10.3390/app112311560
Qiao R, Xu G, Cheng Y, Ye Z, Huang J. Simulation and Analysis of Grid Formation Method for UAV Clusters Based on the 3 × 3 Magic Square and the Chain Rules of Visual Reference. Applied Sciences. 2021; 11(23):11560. https://0-doi-org.brum.beds.ac.uk/10.3390/app112311560
Chicago/Turabian StyleQiao, Rui, Guili Xu, Yuehua Cheng, Zhengyu Ye, and Jinlong Huang. 2021. "Simulation and Analysis of Grid Formation Method for UAV Clusters Based on the 3 × 3 Magic Square and the Chain Rules of Visual Reference" Applied Sciences 11, no. 23: 11560. https://0-doi-org.brum.beds.ac.uk/10.3390/app112311560