
Effects of Tooth Surface Crack Propagation on Meshing Stiffness and Vibration Characteristic of Spur Gear System




Abstract
:1. Introduction
2. Proposed Meshing Stiffness Calculation Model with Tooth Surface Crack
3. Dynamic Modeling of Spur Gear System with Tooth Surface Crack
4. Results and Discussions
4.1. Effects of Single Tooth Surface Crack Parameter on Mesh Stiffness and Vibration Characteristics
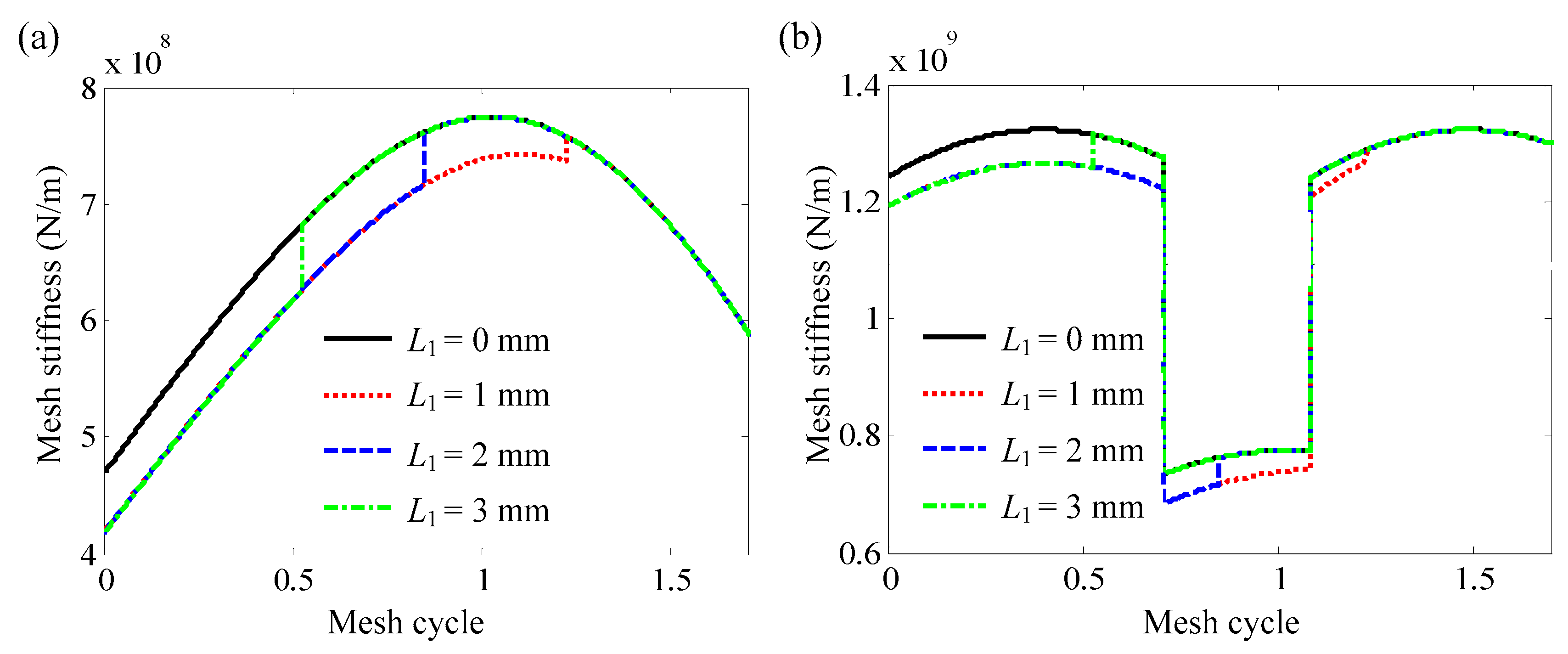
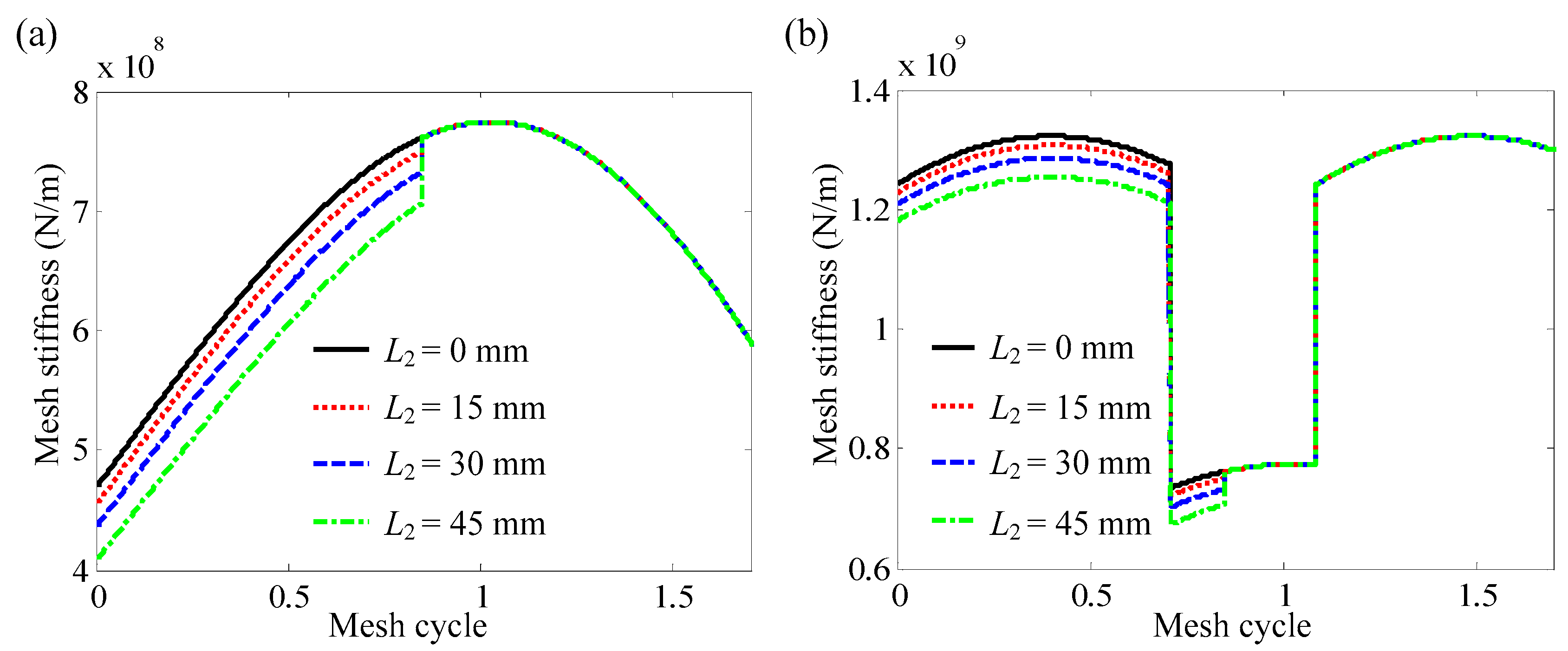
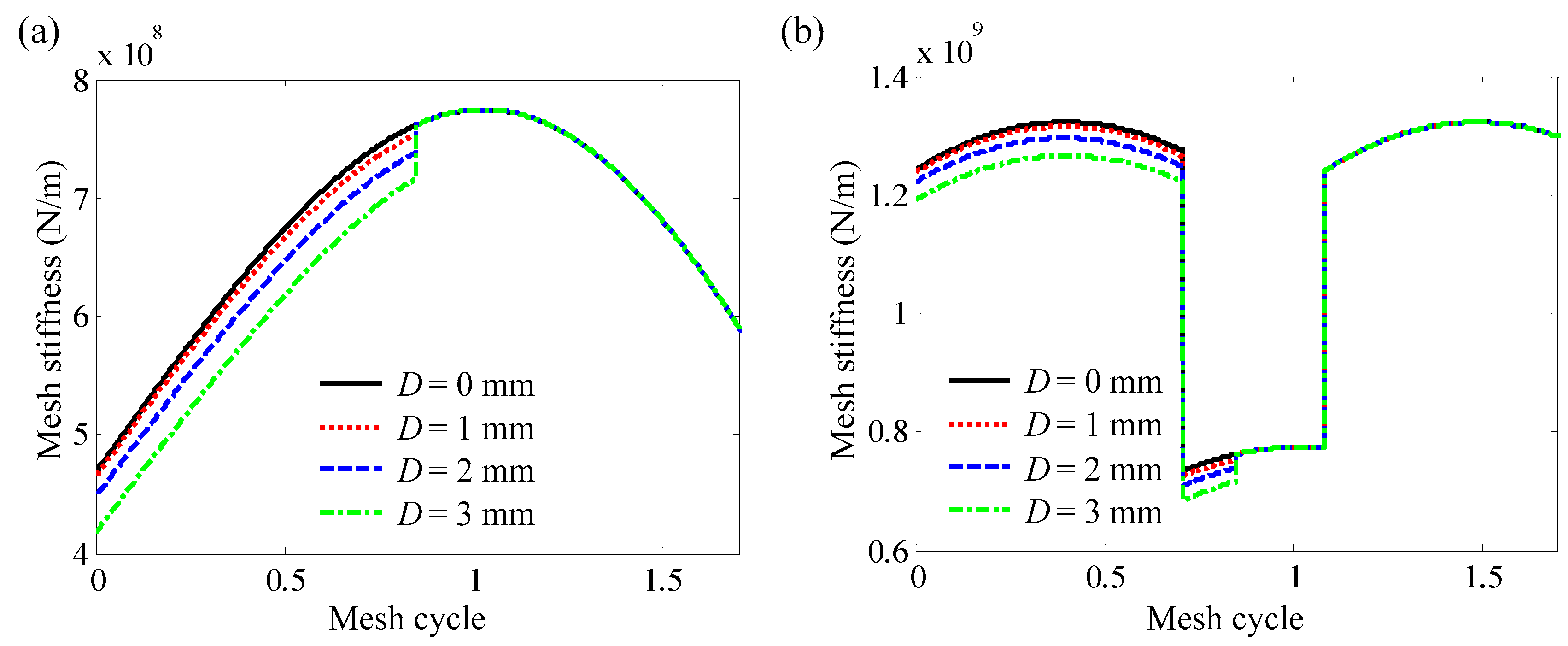
4.1.1. Effects of a Single Crack Parameter on Mesh Stiffness
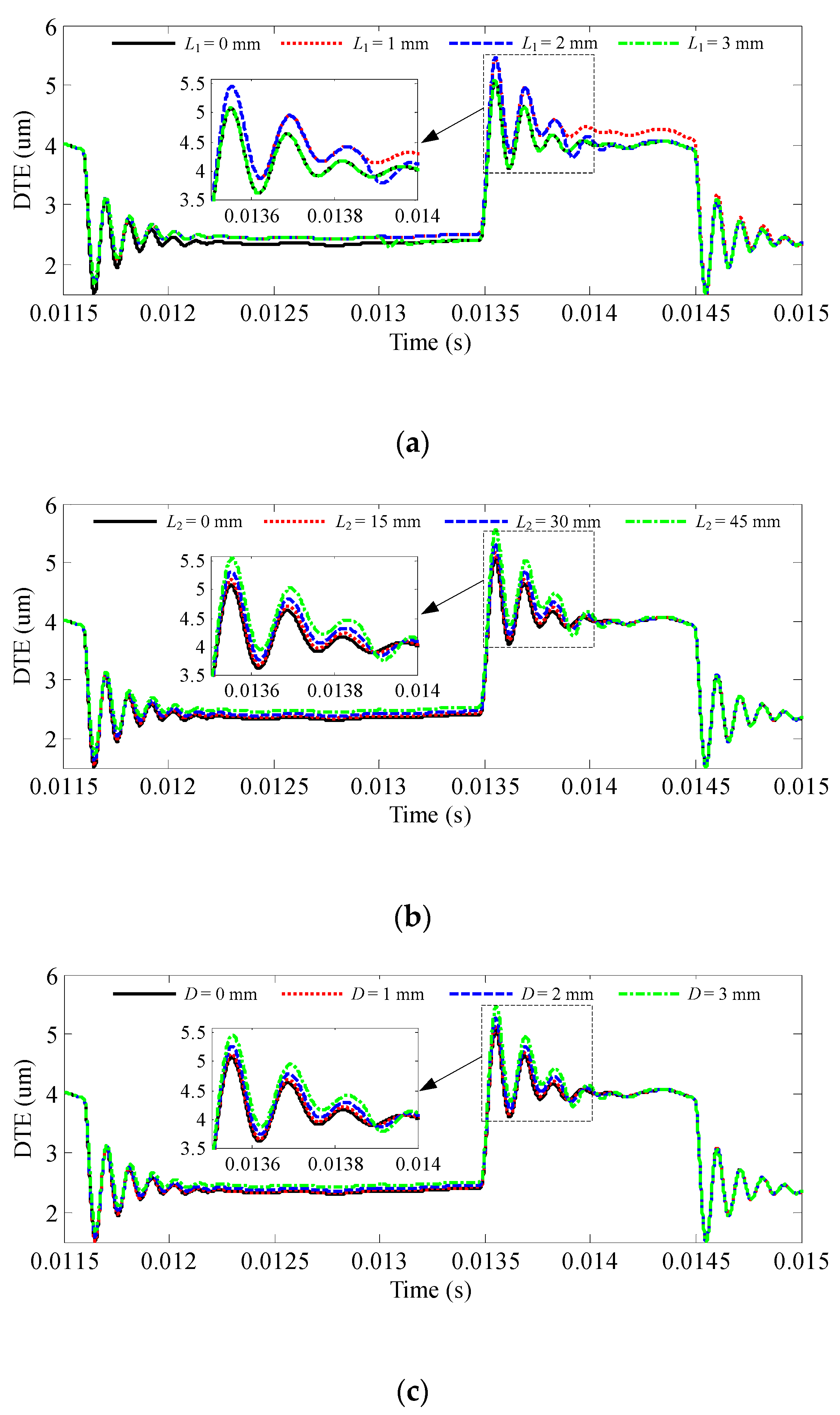
4.1.2. Effects of a Single Crack Parameter on DTE
4.1.3. Effects of a Single Crack Parameter on Acceleration Response
4.2. Effects of Surface Crack Propagation on Meshing Stiffness and Vibration Characteristics
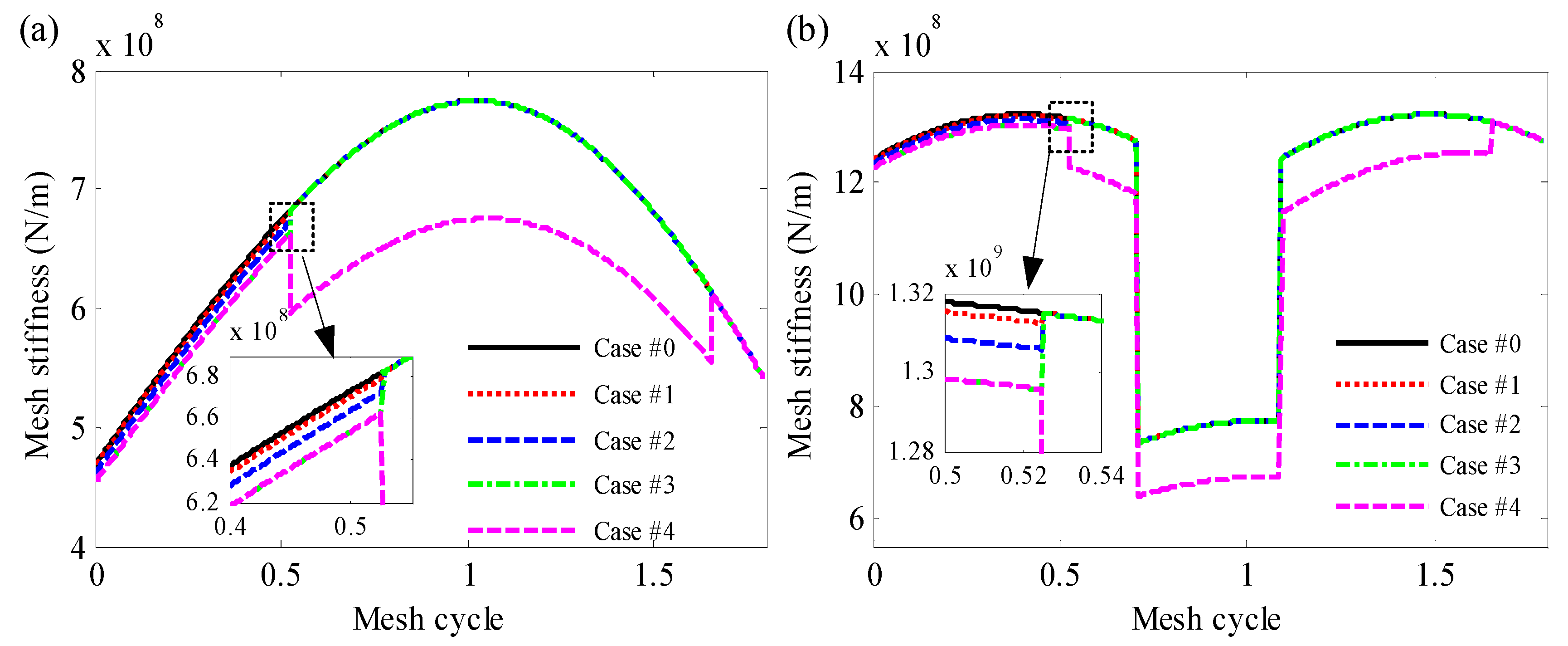
4.2.1. Effects of Surface Crack Propagation Progress on Meshing Stiffness
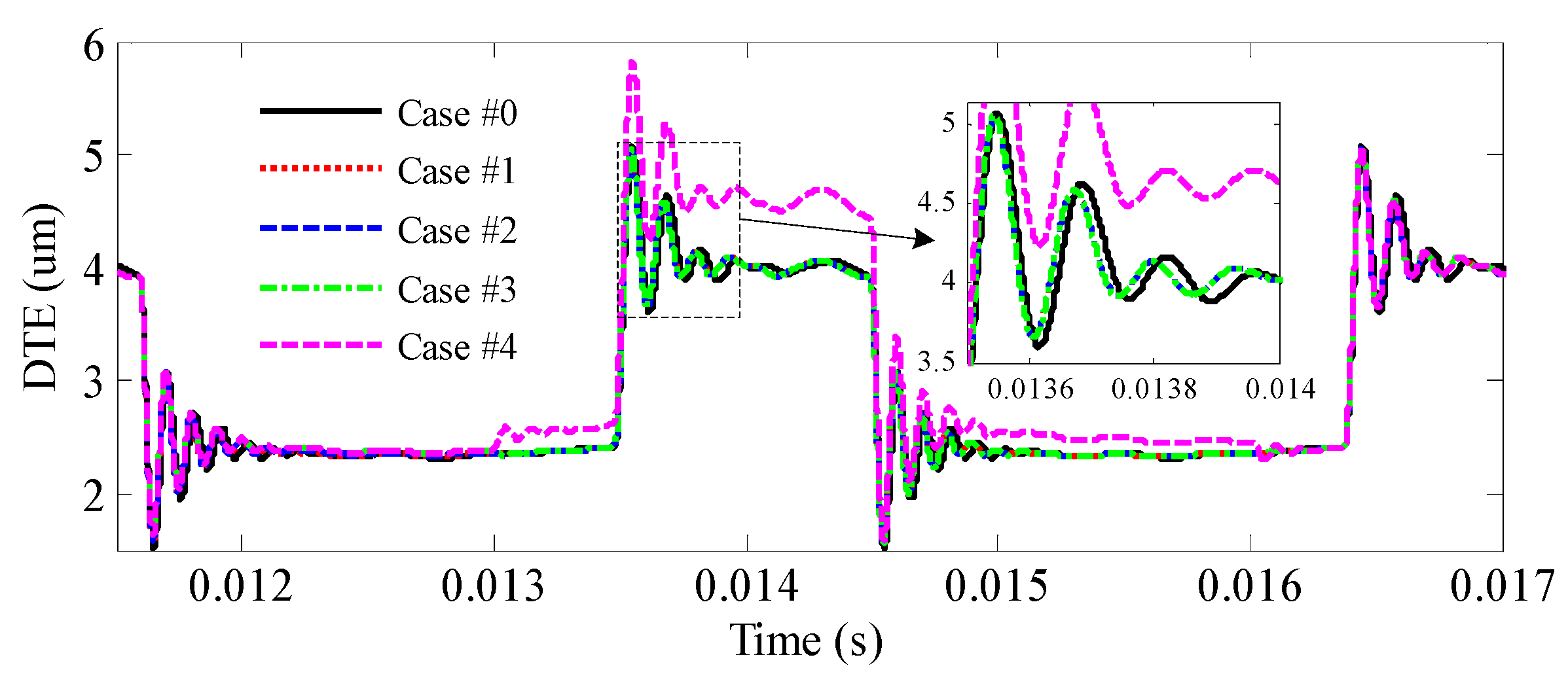
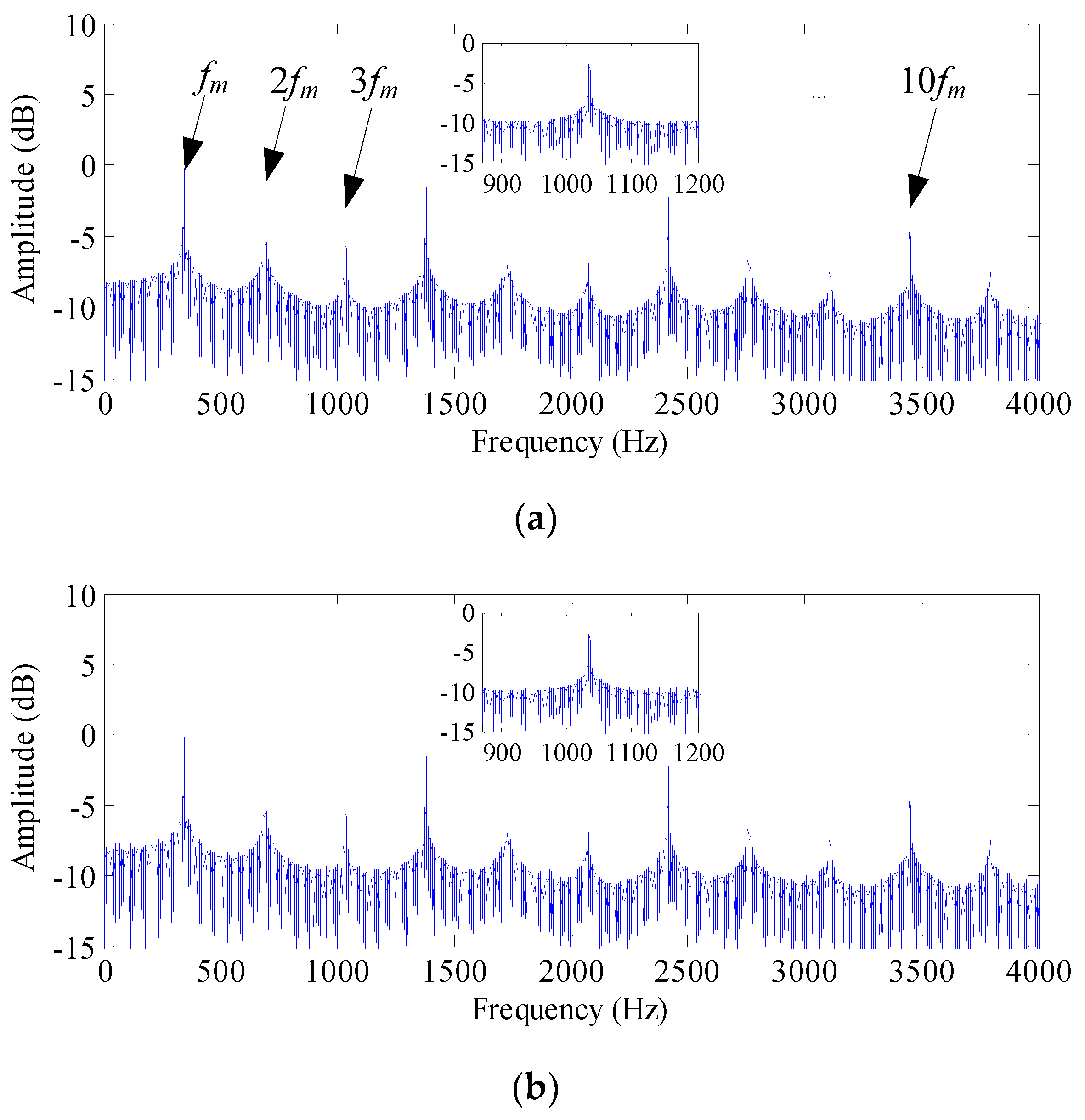
4.2.2. Effects of the Surface Crack Propagation Progress on DTE
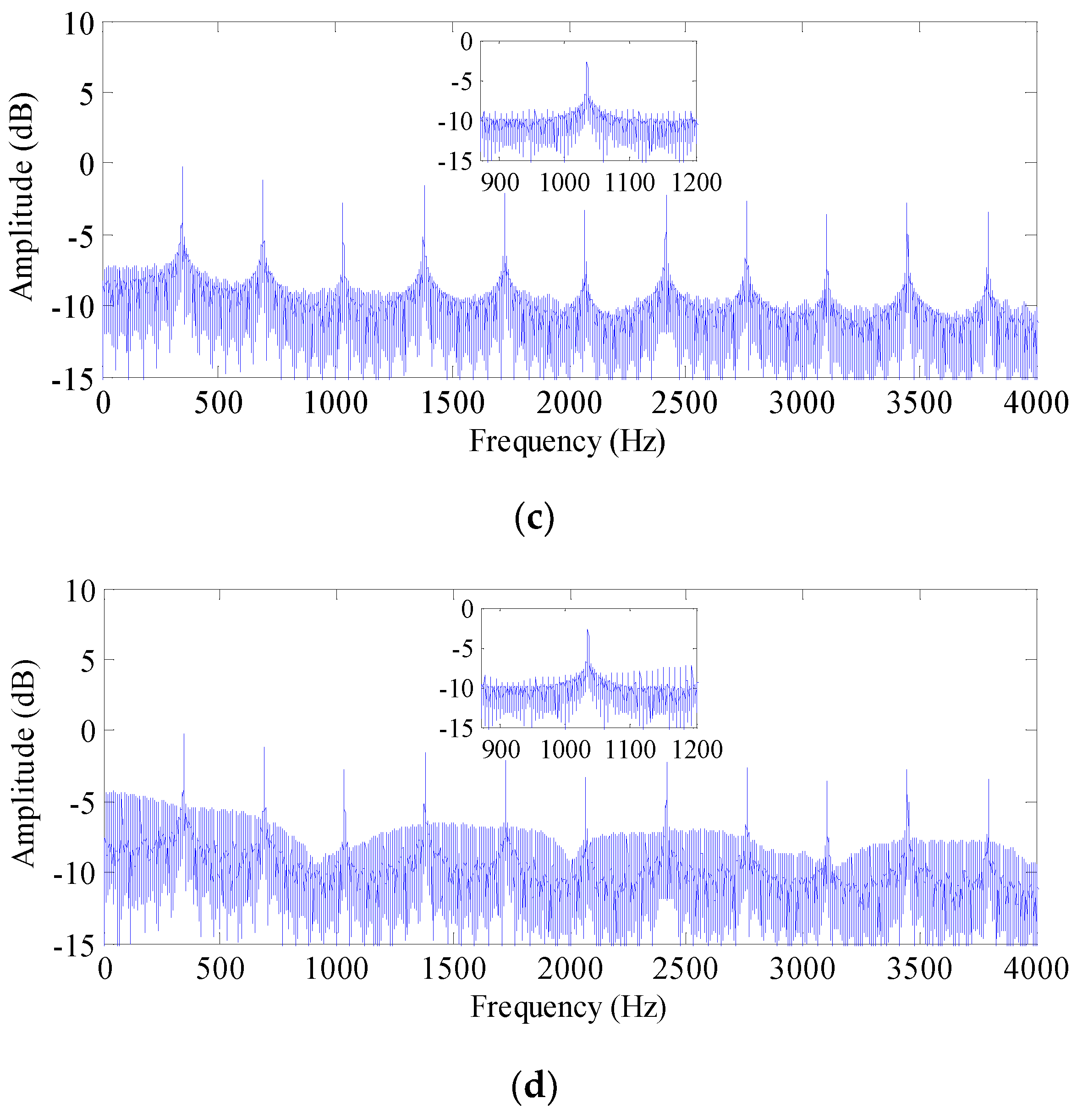
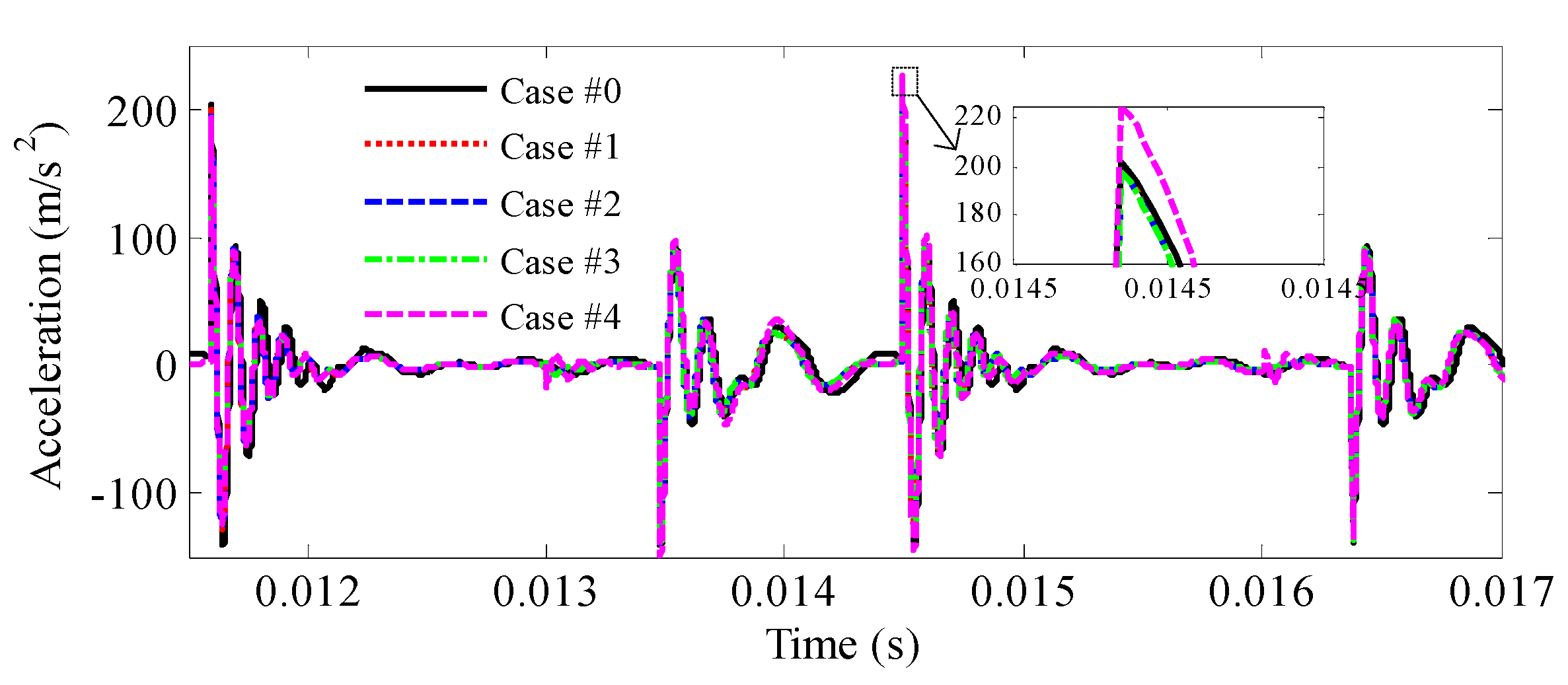
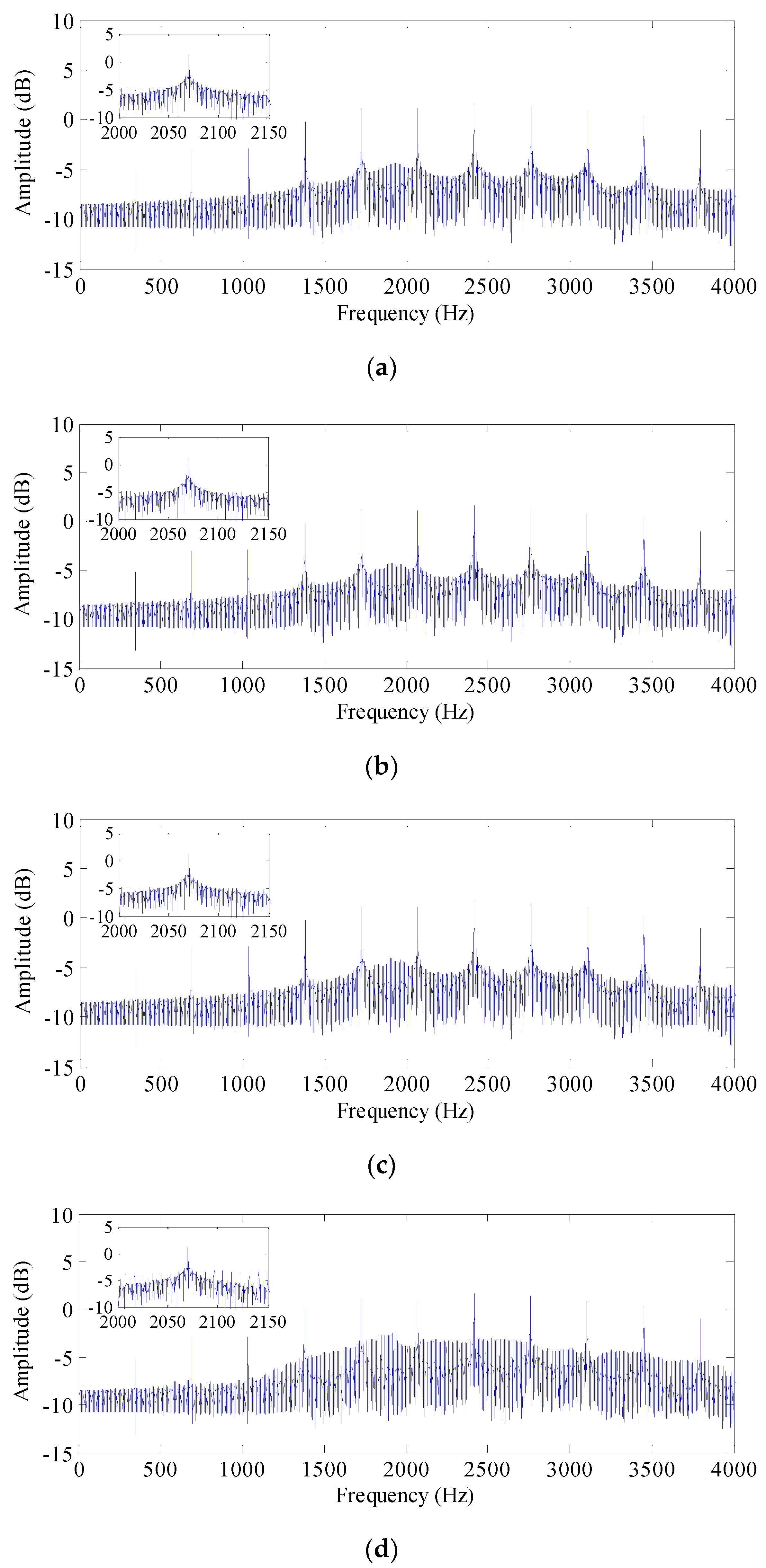
4.2.3. Effects of the Surface Crack Propagation Progress on Acceleration Response
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, Z.G.; Zhai, W.M.; Wang, K.Y. Vibration feature evolution of locomotive with tooth root crack propagation of gear transmission system. Mech. Syst. Signal Process. 2019, 115, 29–44. [Google Scholar] [CrossRef]
- Rashid HS, J.; Place, C.S.; Mba, D.; Lim, R.; Healey, A.; Kleine-Beek, W.; Romano, M. Helicopter MGB Oil System Failure Analysis Using Influence Diagrams and Random Failure Probabilities. Eng. Fail. Anal. 2015, 50, 7–19. [Google Scholar] [CrossRef]
- Chen, K.K.; Huangfu, Y.F.; Ma, H.; Xu, Z.; Wen, B. Calculation of mesh stiffness of spur gears considering complex foundation types and crack propagation paths. Mech. Syst. Signal Process. 2019, 130, 273–292. [Google Scholar] [CrossRef]
- Wang, L.M.; Shao, Y.M. Fault feature extraction of rotating machinery using a reweighted complete ensemble empirical mode decomposition with adaptive noise and demodulation analysis. Mech. Syst. Signal Process. 2020, 138, 106545. [Google Scholar] [CrossRef]
- Chen, K.; Ma, H.; Che, L.Y.; Li, Z.W.; Wen, B. Comparison of meshing characteristics of helical gears with spalling fault using analytical and finite-element methods. Mech. Syst. Signal Process. 2019, 121, 279–298. [Google Scholar] [CrossRef]
- Maláková, S.; Pukár, M.; Frankovsk, P.; Sivák, S.; Palko, M. Meshing Stiffness—A Parameter Affecting the Emission of Gearboxes. Appl. Sci. Basel 2020, 10, 8678. [Google Scholar] [CrossRef]
- Mohammed, O.D.; Rantatalo, M. Gear fault models and dynamics-based modelling for gear fault detection—A review. Eng. Fail. Anal. 2020, 117, 104798. [Google Scholar] [CrossRef]
- Elyousfi, B.; Soualhi, A.; Medjaher, K.; Guillet, F. New approach for gear mesh stiffness evaluation of spur gears with surface defects. Eng. Fail. Anal. 2020, 116, 104740. [Google Scholar] [CrossRef]
- Shi, L.J.; Wen, J.; Pan, B.S.; Xiang, Y.; Lin, C. Dynamic characteristics of a gear system with double-teeth spalling fault and its fault feature analysis. Appl. Sci. Basel 2020, 10, 7058. [Google Scholar] [CrossRef]
- Huangfu, Y.F.; Chen, K.K.; Ma, H.; Li, X.; Han, H.; Zhao, Z. Meshing and dynamic characteristics analysis of spalled gear systems: A theoretical and experimental study. Mech. Syst. Signal Process. 2020, 139, 106640. [Google Scholar] [CrossRef]
- Du, W.T.; Zeng, Q.; Shao, Y.M.; Wang, L.M.; Ding, X.X. Multi-Scale Demodulation for Fault Diagnosis Based on a Weighted-EMD De-Noising Technique and Time-Frequency Envelope Analysis. Appl. Sci. Basel 2020, 10, 7796. [Google Scholar] [CrossRef]
- Chaari, F.; Fakhfakh, T.; Haddar, M. Analytical modelling of spur gear tooth crack and influence on gear mesh stiffness. Eur. J. Mech. A Solids 2009, 28, 461–468. [Google Scholar] [CrossRef]
- Weber, C. The Deformation of Loaded Gears and the Effect on Their Load Carrying Capacity, Sponsored Research (Germany). Br. Dep. Sci. Ind. Res. 1949, 3, 22–30. [Google Scholar]
- Cornell, R.W. Compliance and stress sensitivity of spur gear teeth. J. Mech. Transm. Autom. 1981, 103, 447–459. [Google Scholar] [CrossRef] [Green Version]
- Kasuba, R.; Evans, J.W. An extended model for determining dynamic loads in spur gearing. J. Mech. Des. Trans. Am. Soc. Mech. Eng. 1981, 103, 398–409. [Google Scholar] [CrossRef]
- Yang, D.C.H.; Lin, J.Y. Hertzian damping, tooth friction and bending elasticity in gear impact dynamics. J. Mech. Transm. Autom. 1987, 109, 189–196. [Google Scholar] [CrossRef]
- Tian, X.H. Dynamic Simulation for System Response of Gearbox Including Localized Gear Faults. Master’s Thesis, University of Alberta, Edmonton, AB, Canada, 2004. [Google Scholar]
- Sainsot, P.; Velex, P.; Duverger, O. Contribution of gear body to tooth deflections a new bidimensional analytical formula. J. Mech. Des. ASME 2004, 126, 748–752. [Google Scholar] [CrossRef]
- Chen, Z.G.; Shao, Y.M. Mesh stiffness calculation of a spur gear pair with tooth profile modification and tooth root crack. Mech. Mach. Theory 2013, 62, 63–74. [Google Scholar] [CrossRef]
- Lei, Y.G.; Liu, Z.Y.; Wang, D.L. A probability distribution model of tooth pits for evaluating time-varying mesh stiffness of pitting gears. Mech. Syst. Signal Process. 2018, 106, 355–366. [Google Scholar] [CrossRef]
- Yu, W.N.; Mechefske, C.K.; Timusk, M. A new dynamic model of a cylindrical gear pair with localized spalling defects. Nonlinear Dyn. 2018, 91, 2077–2095. [Google Scholar] [CrossRef]
- Chaari, F.; Baccar, W.; Abbes, M.S.; Haddar, M. Effect of spalling or tooth breakage on gearmesh stiffness and dynamic response of a one-stage spur gear transmission. Eur. J. Mech. A Solids 2008, 27, 691–705. [Google Scholar] [CrossRef]
- Ma, R.; Chen, Y.S.; Cao, Q.J. Research on dynamics and fault mechanism of spur gear pair with spalling defect. J. Sound Vib. 2012, 331, 2097–2109. [Google Scholar] [CrossRef]
- Ma, R.; Chen, Y.S. Research on the dynamic mechanism of the gear system with local crack and spalling failure. Eng. Fail. Anal. 2012, 26, 12–20. [Google Scholar] [CrossRef]
- Han, L.; Qi, H. Influences of tooth spalling or local breakage on time-varying mesh stiffness of helical gears. Eng. Fail. Anal. 2017, 79, 75–88. [Google Scholar] [CrossRef]
- Shao, Y.M.; Wang, X.L.; Liu, J.; Chen, Z.G. Time-varying stiffness model and dynamic response characteristics of gears with tooth surface spalling and edge contact. J. Vib. Shock 2014, 33, 8–14. (In Chinese) [Google Scholar]
- Fakhfakh, T.; Chaari, F.; Haddar, M. Numerical and experimental analysis of a gear system with teeth defects. Int. J. Adv. Manuf. Technol. 2005, 25, 542–550. [Google Scholar] [CrossRef]
- Ma, H.; Li, Z.W.; Feng, M.J.; Feng, R.; Wen, B. Time-varying mesh stiffness calculation of spur gears with spalling defect. Eng. Fail. Anal. 2016, 66, 166–176. [Google Scholar] [CrossRef]
- Saxena, A.; Parey, A.; Chouksey, M. Time varying mesh stiffness calculation of spur gear pair considering sliding friction and spalling defects. Eng. Fail. Anal. 2016, 70, 200–211. [Google Scholar] [CrossRef]
- Jiang, H.J.; Shao, Y.M.; Mechefske, C.K. Dynamic characteristics of helical gears under sliding friction with spalling defect. Eng. Fail. Anal. 2014, 39, 92–107. [Google Scholar] [CrossRef]
- Luo, Y.; Baddour, N.; Liang, M. Dynamical modeling and experimental validation for tooth pitting and spalling in spur gears. Mech. Syst. Signal Process. 2019, 119, 155–181. [Google Scholar] [CrossRef]
- Cheng, S.H.; Hu, H.T.; Shi, Q. Analysis on the Reason of Crack on Carburized Gear Tooth Surface. China Heavy Equip. 2016, 3, 41–45. (In Chinese) [Google Scholar]
- Ding, Y.; Rieger, N.F. Spalling formation mechanism for gears. Wear 2003, 254, 1307–1317. [Google Scholar] [CrossRef]
- Gu, X.; Velex, P.; Sainsot, P.; Bruyère, J. Analytical investigations on the mesh stiffness function of solid spur and helical gears. J. Mech. Des. 2015, 137, 063301. [Google Scholar] [CrossRef]
- Ding, X.X.; He, Q.B.; Shao, Y.M.; Huang, W. Transient Feature Extraction Based on Time-Frequency Manifold Image Synthesis for Machinery Fault Diagnosis. IEEE Trans. Instrum. Meas. 2019, 68, 1–14. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Pinion | Gear |
|---|---|---|
| Teeth number | 23 | 39 |
| Module (mm) | 3 | 3 |
| Teeth width (mm) | 50 | 50 |
| Pressure angle (o) | 20 | 20 |
| Poisson’s ratio | 0.3 | 0.3 |
| Addendum coefficient | 1 | 1 |
| Dedendum coefficient | 0.25 | 0.25 |
| Hub radius (mm) | 25 | 25 |
| Young’s modulus E (MPa) | 2.06 × 105 | 2.06 × 105 |
| Mass (kg) | 1.32 | 3.16 |
| Mass moment of inertia (kg·m2) | 9.8 × 10−4 | 68 × 10−4 |
| Bearing radial stiffness (N/m) | Kpx = Kpy = 5.8 × 108 | Kgx = Kg y = 5.8 × 108 |
| Bearing radial damping (N·s/m) | Cpx = Cpy = 5 × 103 | Cgx = Cgy = 5 × 103 |
| Case | Failure Degree | Crack Position | Crack Parameters | |||
|---|---|---|---|---|---|---|
| L1 | L2 | D | x1 | |||
| Case #0 | Healthy | P | 0 | 0 | 0 | 5 |
| Case #1 | 33.3% crack | S1 | 1 | 30 | 0.73 | 4 |
| Case #2 | 66.7% crack | S2 | 2 | 30 | 1.39 | 3 |
| Case #3 | 100% crack | S3 | 3 | 30 | 2 | 2 |
| Case #4 | Spalling | S3 | 3 | 30 | 2 | 2 |
| Response Type | Fault Case | BAR (dB) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Harmonic Order | Average Value | ||||||||||||
| fm | 2fm | 3fm | 4fm | 5fm | 6fm | 7fm | 8fm | 9fm | 10fm | 11fm | |||
| DTE | Case #1 | −4.4 | −4.3 | −3.3 | −4.5 | −4.1 | −3.0 | −4.1 | −3.8 | −3.1 | −4.3 | −3.5 | −3.9 |
| Case #2 | −4.1 | −4.0 | −2.8 | −4.2 | −3.8 | −2.7 | −3.9 | −3.6 | −3.1 | −4.1 | −3.3 | −3.6 | |
| Case #3 | −3.8 | −3.6 | −2.4 | −3.9 | −3.5 | −2.3 | −3.6 | −3.3 | −2.7 | −3.7 | −3.0 | −3.3 | |
| Case #4 | −1.3 | −1.5 | −0.8 | −1.7 | −1.3 | −0.5 | −1.3 | −1.2 | −1.2 | −1.6 | −1.1 | −1.2 | |
| Acceleration | Case #1 | 0.4 | −1.3 | −0.9 | −2.8 | −2.7 | −2.5 | −3.7 | −3.5 | −3.4 | −3.4 | −2.4 | −2.4 |
| Case #2 | 0.4 | −1.3 | −0.9 | −2.7 | −2.5 | −2.3 | −3.6 | −3.4 | −3.3 | −3.3 | −2.4 | −2.3 | |
| Case #3 | 0.5 | −1.2 | −0.8 | −2.6 | −2.4 | −2.2 | −3.3 | −3.1 | −3.0 | −3.0 | −2.4 | −2.1 | |
| Case #4 | 0.7 | −1.0 | −0.1 | −1.0 | −1.0 | −0.6 | −1.2 | −1.3 | −1.6 | −1.4 | −0.9 | −0.9 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.-t.; Shao, Y.-m.; Jiang, W.-w.; Zhang, L.-k.; Wang, L.-m.; Xu, J. Effects of Tooth Surface Crack Propagation on Meshing Stiffness and Vibration Characteristic of Spur Gear System. Appl. Sci. 2021, 11, 1968. https://0-doi-org.brum.beds.ac.uk/10.3390/app11041968
Yang L-t, Shao Y-m, Jiang W-w, Zhang L-k, Wang L-m, Xu J. Effects of Tooth Surface Crack Propagation on Meshing Stiffness and Vibration Characteristic of Spur Gear System. Applied Sciences. 2021; 11(4):1968. https://0-doi-org.brum.beds.ac.uk/10.3390/app11041968
Chicago/Turabian StyleYang, Lan-tao, Yi-min Shao, Wei-wei Jiang, Lu-ke Zhang, Li-ming Wang, and Jin Xu. 2021. "Effects of Tooth Surface Crack Propagation on Meshing Stiffness and Vibration Characteristic of Spur Gear System" Applied Sciences 11, no. 4: 1968. https://0-doi-org.brum.beds.ac.uk/10.3390/app11041968