1. Introduction
Under the external excitation of the ship’s motion, the phenomena of liquid sloshing will inevitably take place in partially filled liquid tanks of moving ships. In these cases, the traditional quasi-static method assuming the free surface is parallel to the sea level is not suitable for estimating the effect of free surface on ship stability. The sloshing-induced force would have a direct effect on ship dynamic stability [
1,
2]. Therefore, it is of great importance to determine the sloshing-induced force for navigation safety.
In recent decades, many researchers shifted their attention to the computational fluid dynamics (CFD) technique to solve the liquid sloshing problem, though the computing time may be intimidating [
3]. In early years, due to the limitation of computing ability, mesh based numerical methods were mostly employed to investigate the liquid sloshing issues, such as the finite differential method (FDM) [
4,
5,
6,
7,
8], the finite element method (FEM) [
9,
10,
11,
12], the finite volume method (FVM) [
13,
14,
15], the volume of fluid method (VOF) [
16,
17], and the level-set method (L-S) [
18].
Resulting from the use of mesh, however, the mesh based numerical methods suffer from difficulties in dealing with the nonlinear free surface flows. Recently, with the improvement of computing ability, meshfree methods have been widely used to simulate the violent free surface flow with large deformation and nonlinear fragmentation [
19]. The key idea of the meshfree methods is to provide accurate and stable numerical solutions for integral equations or partial differential equations (PDEs) with all kinds of possible boundary conditions using a set of arbitrarily distributed nodes or particles [
20]. In this way, the meshfree methods overcome the inherent difficulty of the mesh methods, i.e., the mesh distortion caused by large deformation.
A smoothed particle hydrodynamics (SPH) method is one of the popular meshfree methods. SPH was firstly introduced in 1977 [
21,
22]. The SPH method was firstly applied to address the free surface flow problem in 1994 [
23]. After that, SPH methods including weakly-compressible SPH (WCSPH) and incompressible SPH (ISPH) were used to simulate the phenomena of liquid sloshing in partially filled tanks [
24,
25,
26,
27,
28,
29,
30,
31,
32,
33,
34]. However, the kernel in the SPH method is considered as a mass distribution of each particle. The superposition of the kernels represents the physical superposition of mass. Thus, the particle is like a spherical cloud [
35]. This concept may be more fitted to compressible fluids.
Another popular meshfree method is the moving particle semi-implicit (MPS) method. The original MPS method was proposed by Koshizuka and Oka [
36] to simulate the incompressible flow. In the original MPS method, there were several defects including non-optimal source term, gradient and collision models, and search of free-surface particles, which led to less accurate fluid motions and non-physical pressure fluctuations [
37]. To overcome these defects, many researchers have put forward a series of improvements on the MPS method, including the improvement of the kernel function [
38,
39], the Laplacian model [
40], the collision model [
41], the pressure Poisson equation (PPE) [
37,
42,
43,
44,
45], the pressure gradient model [
46,
47], and the boundary condition [
48,
49]. The MPS method has also been widely used to solve the problem of liquid sloshing [
50,
51,
52,
53,
54,
55].
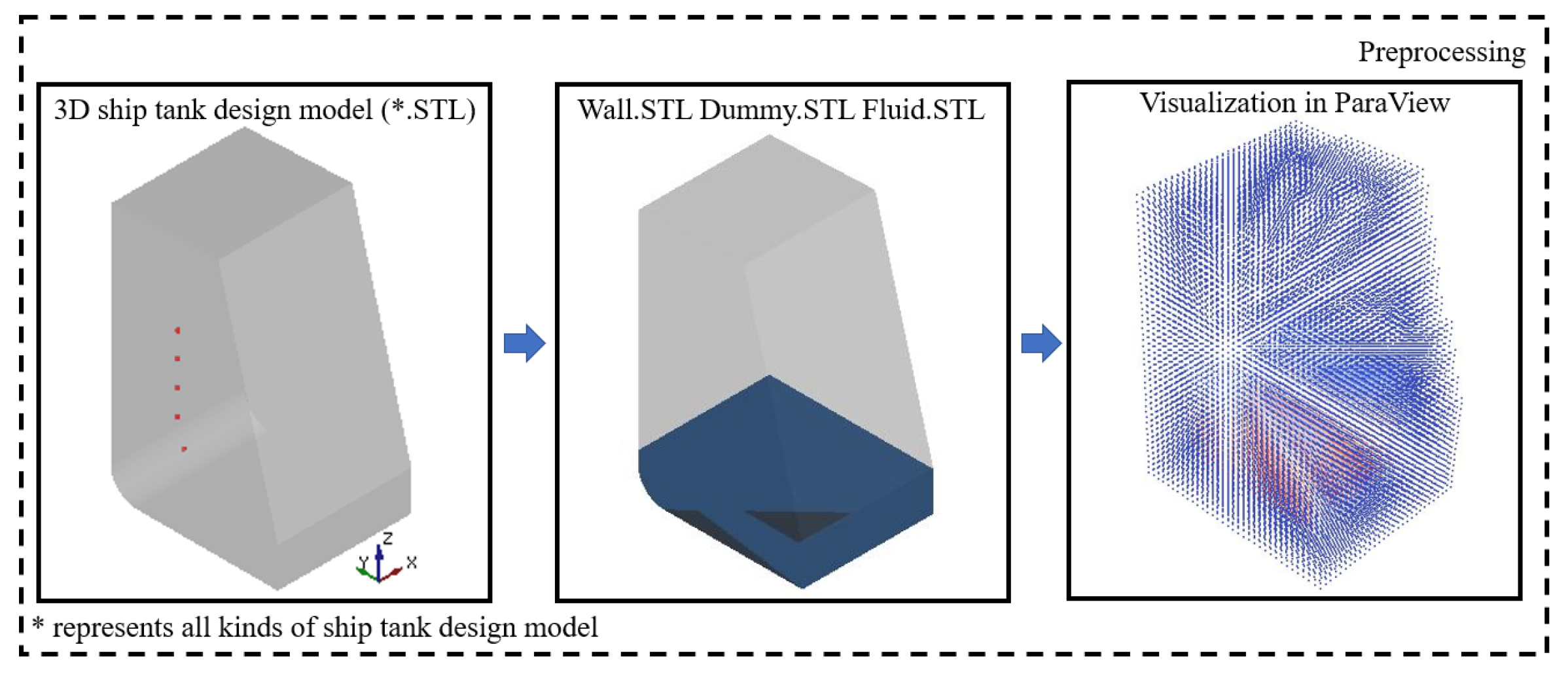
Liquid sloshing in ship tanks has a significant effect on ship dynamic stability. However, the main weaknesses of the current research on liquid sloshing are that most researchers used simplified ship tanks instead of the real ship tanks to simulate liquid sloshing, and do not consider the effect of real ship motion under actual loading conditions. For complicated surface shapes, like structure of arc and slope, equally spaced particle distribution with nearly constant thickness is not readily found [
35]. Thus, the initialization of boundary particles in complex tanks is more cumbersome than that in simplified tanks. Furthermore, the solid boundary shape is represented by a finite number of particles, and the representation of the complete details of the geometric information will be more complicated. Although sloshing simulations in real ships are complex, it is necessary for a realistic investigation of sloshing-inducing force. Meanwhile, the excitation period adopted in previous works came from the natural frequencies of gravity waves in an upright resting cylindrical tank [
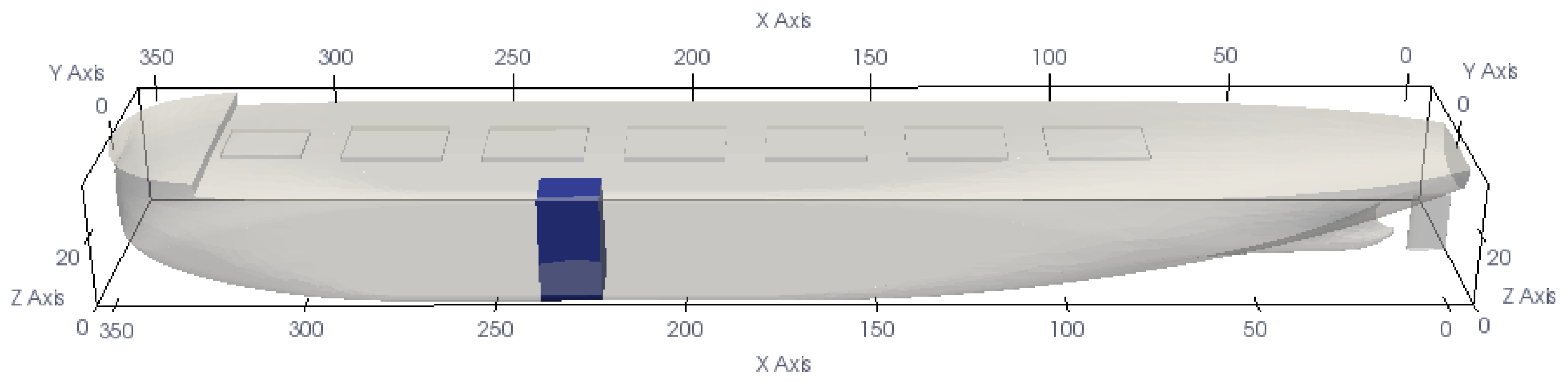
56]. However, this period is different from the rolling period of real ships in most cases. Therefore, the sloshing-induced force in ship tanks under more realistic conditions needs to be further investigated.
This paper aims to compute the dynamic force acting on the bulkhead caused by more realistic excitation in real ship tanks. The efficiency of MPS is generally better than that of WCSPH, but similar to ISPH [
57]. From the discrepancies of the kernel function between SPH and MPS methods, the MPS method is more suitable for simulating incompressible fluids than the SPH method. Thus, this paper uses the MPS method to calculate the sloshing-induced force in ship tanks. First, the MPS method used in this paper is verified via numerical simulations of liquid sloshing in a rectangular tank. After that, numerical simulations of liquid sloshing in a real ship tank are carried out. Finally, the sloshing-induced force is computed and analyzed.
The rest of this paper is organized as follows:
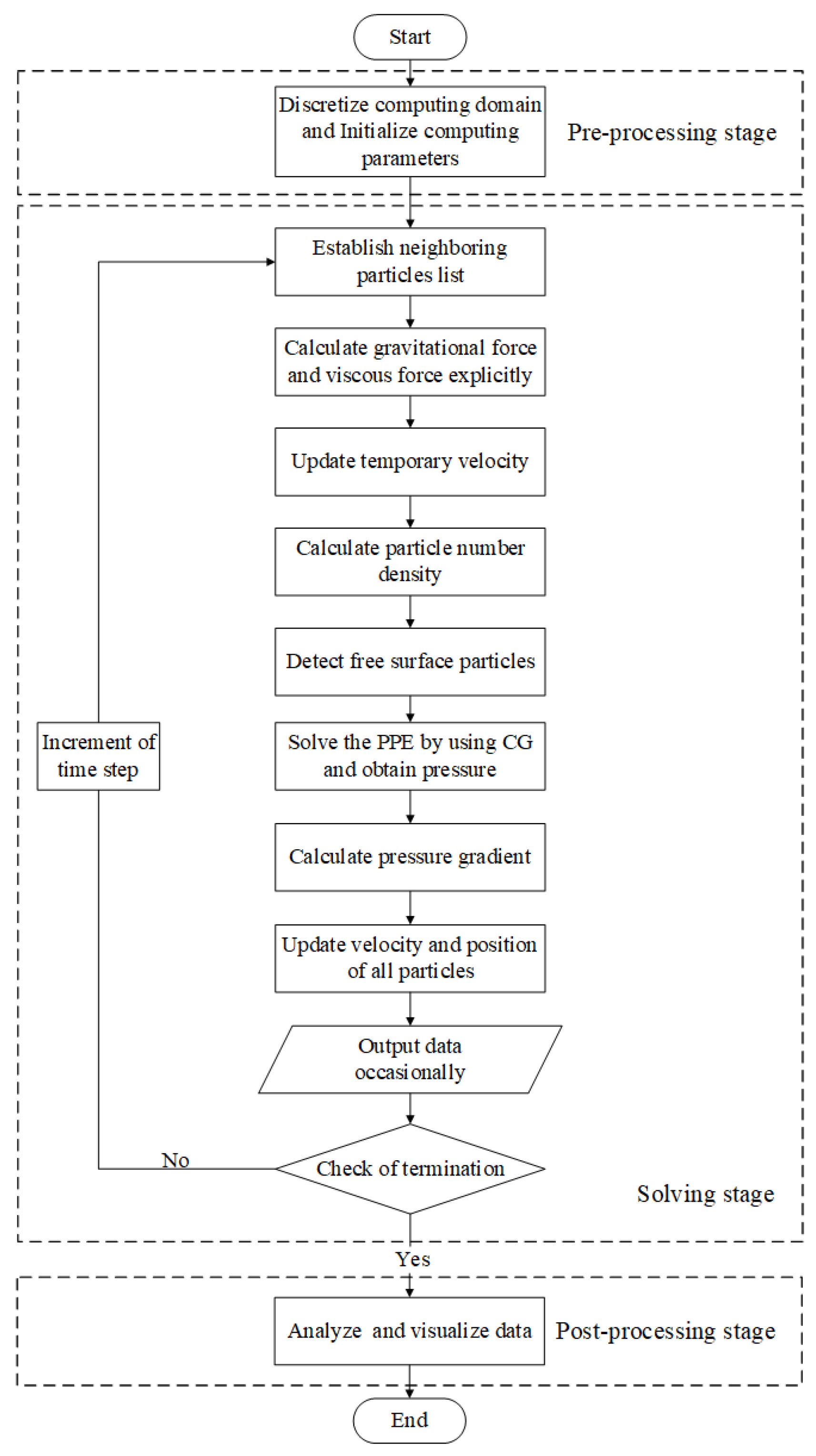
Section 2 introduces the basic theories of the MPS method.
Section 3 verifies the MPS method used in this paper via liquid sloshing simulations.
Section 4 gives the numerical results of the liquid sloshing in a real ship tank under different ship rolling motions.
Section 5 draws conclusions.
3. Validation
To verify the effectiveness of the MPS method used in this paper, numerical simulations of liquid sloshing are carried out with a rectangular tank. Simulation results are then compared with the experimental results [
60] and the numerical simulation results [
52].
The simulation conditions are set according to [
60]. The length, width, and height of this tank are
m,
m, and
m, respectively, and the water depth is set to
m. This tank sways harmonically under the external excitation
, where
A is amplitude of sway (
m) and
is excitation frequency (
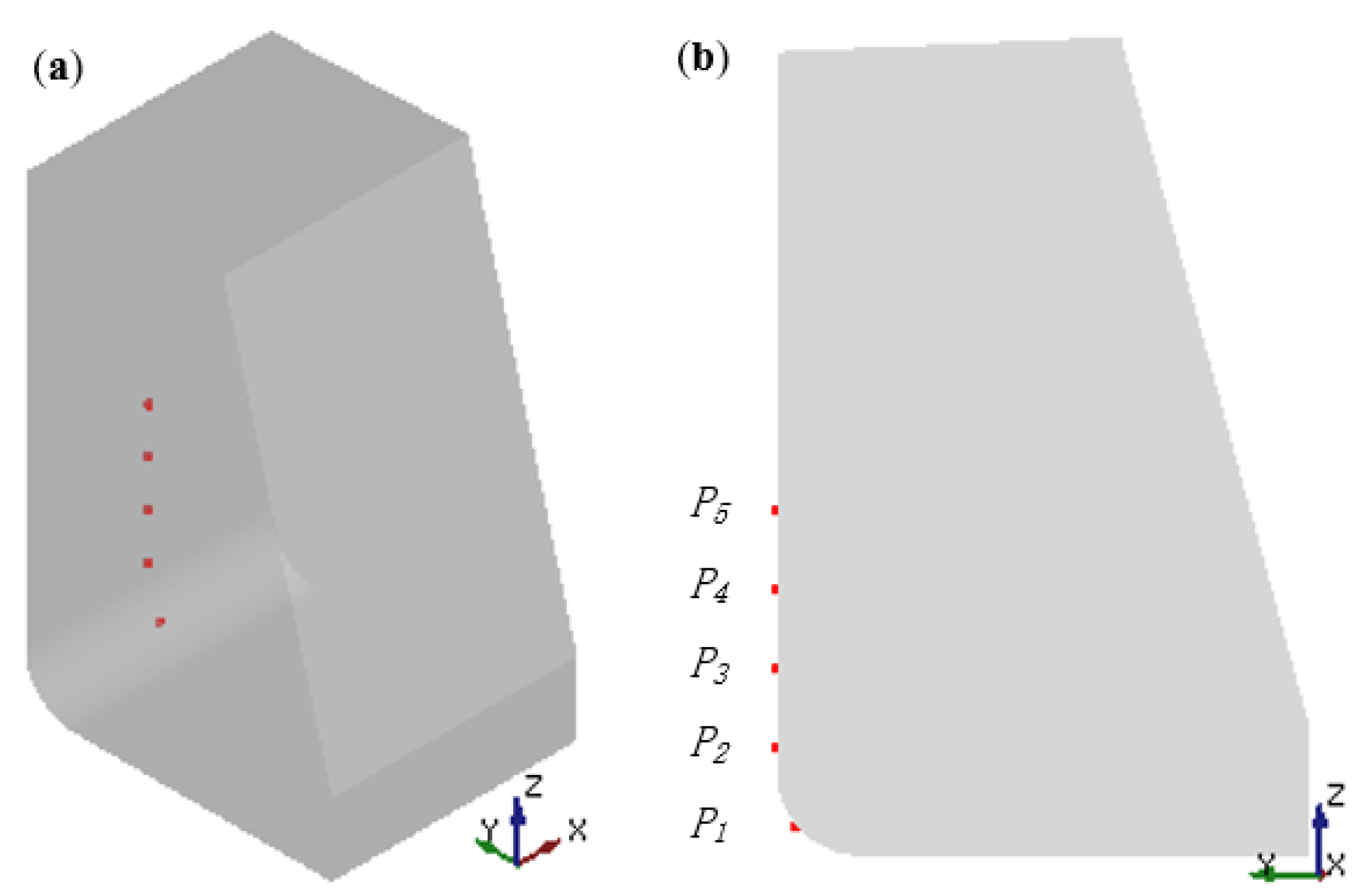
rad/s). Meanwhile, a probe
is arranged at the middle of the wall perpendicular to the excitation direction and is
m away from the tank bottom. For computation parameters, the initial particle distance is set to
m, the time step is
s, and the density of fluid is 1000 kg/m
.
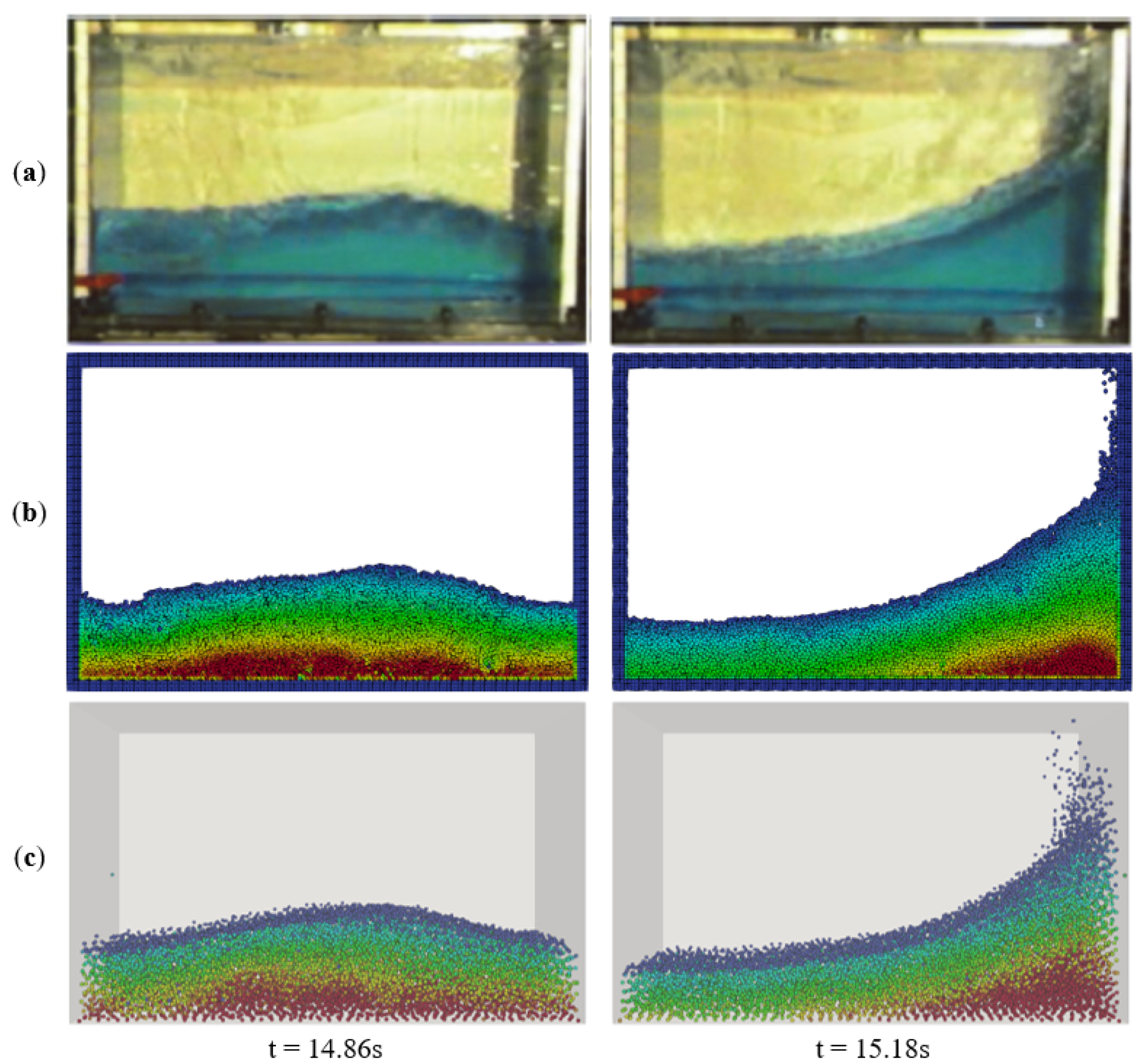
Comparisons of the numerical simulation results of the free surface profiles at time 14.86 s and 15.18 s with that of the experiments given by [
60] are illustrated in
Figure 3. From this figure, it can be seen that both the 2D and the 3D numerical simulation results make good agreement with the experimental results.
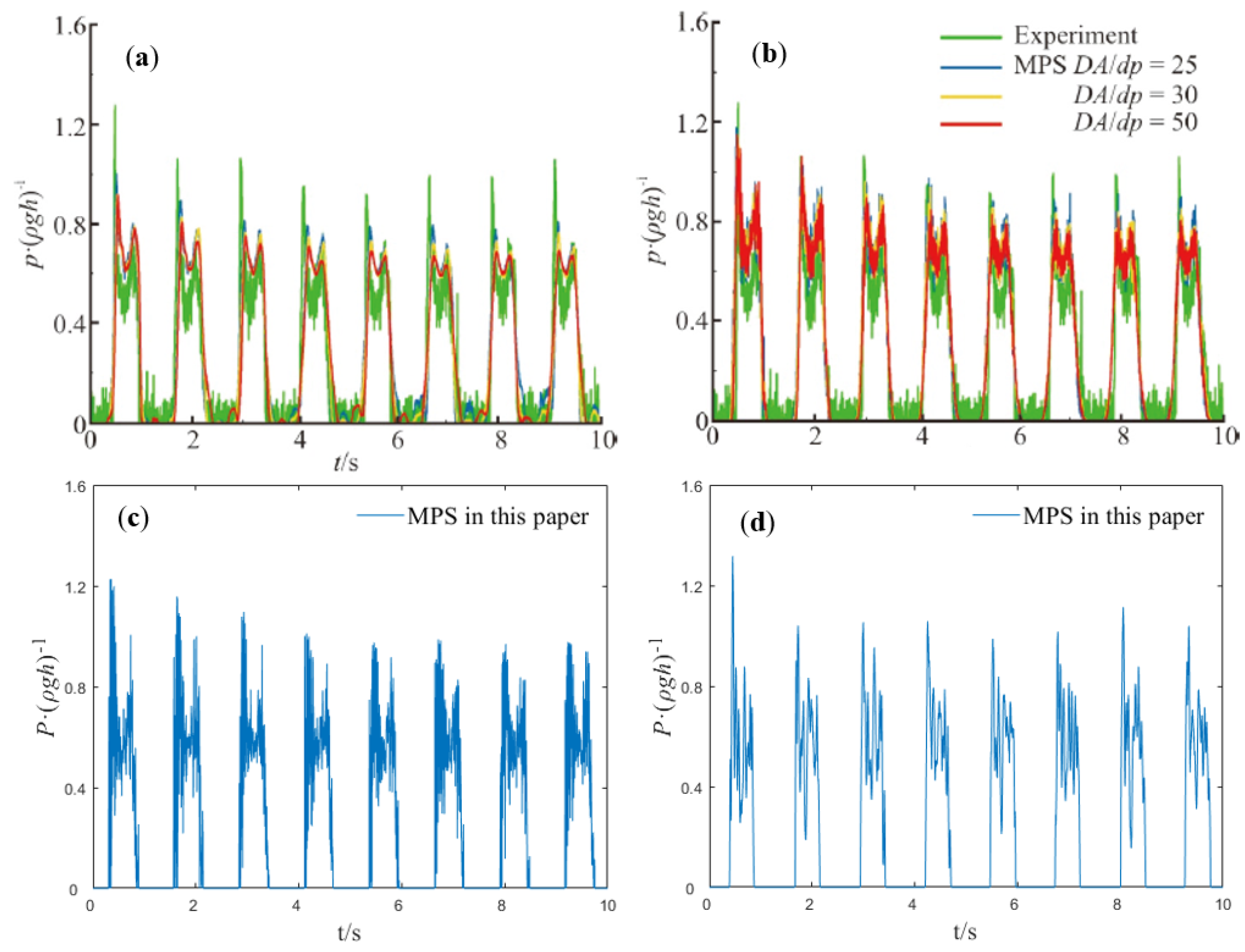
Meanwhile, comparisons of numerical simulation results of the pressure impact at the probe
with that given by the experiments [
60] and that given by another numerical simulation [
52] are shown in
Figure 4. From this figure, it can be seen that both 2D and 3D numerical simulation results obtained in this paper are in good agreement with that given by experimental results and numerical results. Despite few deviations in the 3D results, they all have almost the same maximum and minimum values and the same trend of the pressure.
The above numerical simulation results show that the MPS method used in this paper is effective in computing the dynamic pressure caused by the liquid sloshing in tanks swaying harmonically and thus can be used to numerically study the sloshing-induced force of ship tanks.
5. Conclusions
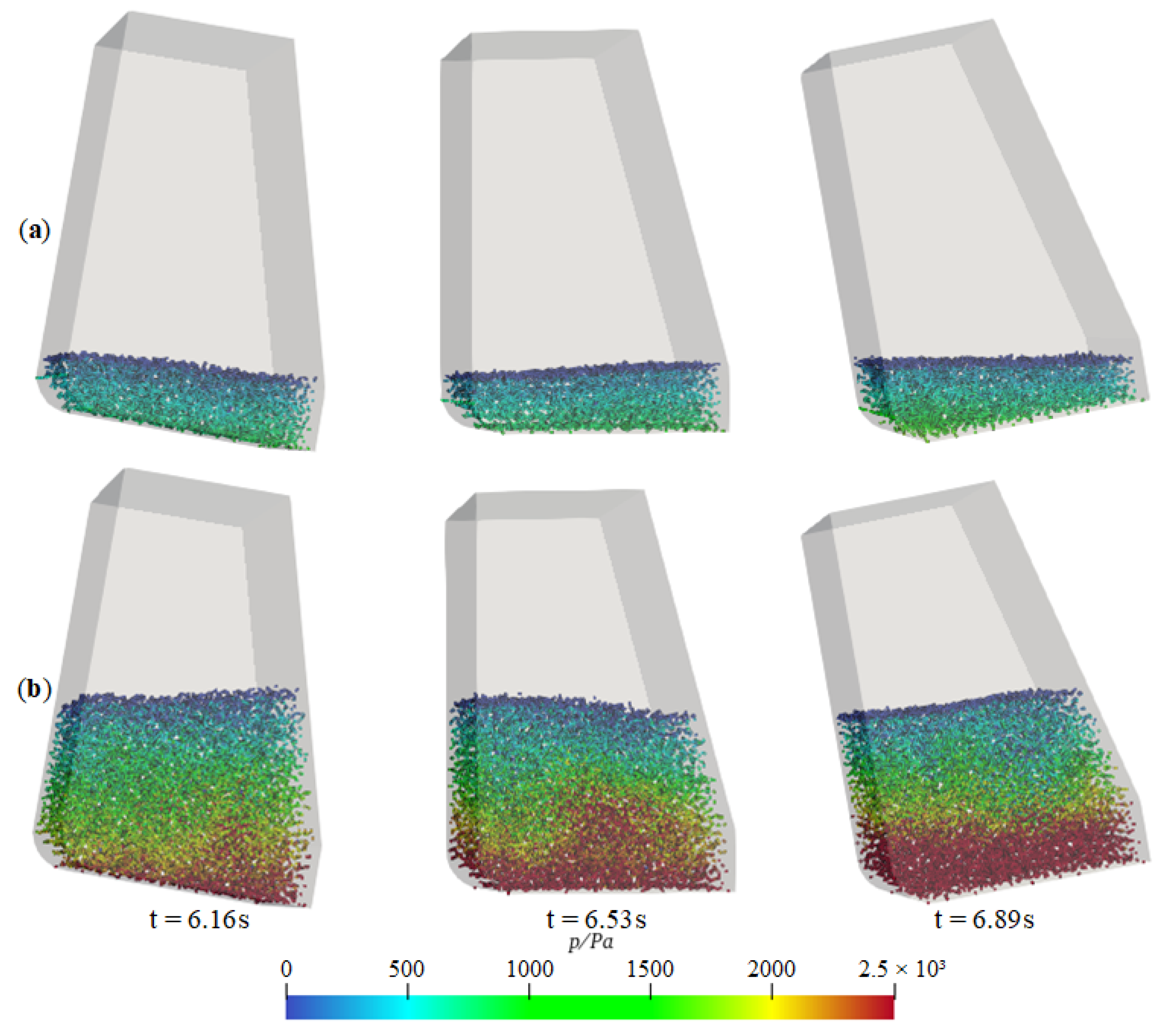
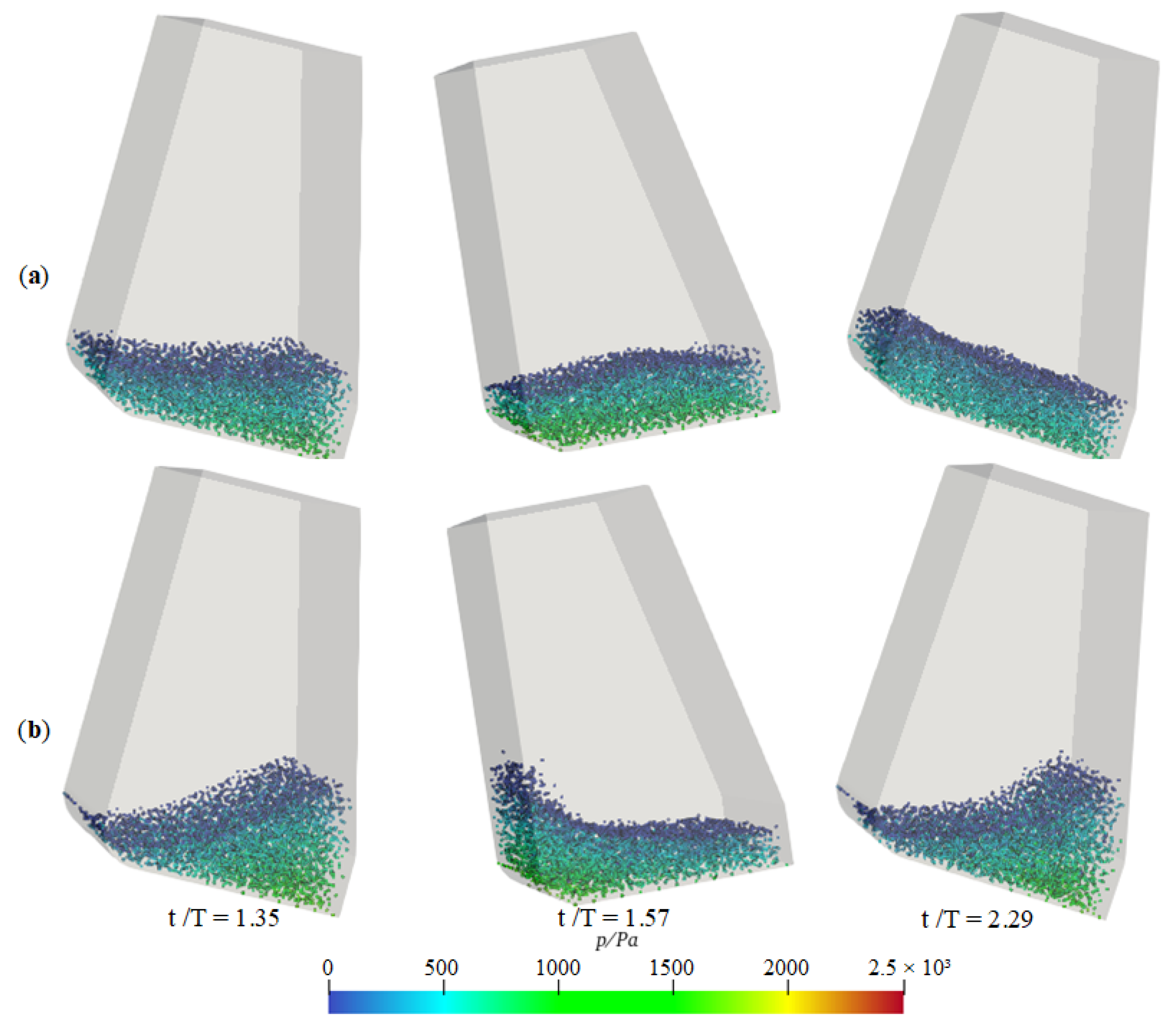
This paper lays a solid foundation for further research on the effect of tank sloshing on the dynamic stability of ships. The phenomena of liquid sloshing in a ballast tank under realistic ship rolling motion are numerically simulated by using the MPS method. After that, sloshing-induced force on sidewall of the tank is obtained and analyzed.
Conclusions can be summarized as follows:
(1) The phenomena of large deformation and nonlinear fragmentation of free surface, e.g., accumulation, bending and slamming, etc., can be found in liquid sloshing, which proves that a traditional quasi-static method cannot reflect the influence of the violent free surface on ship dynamic stability. In this case, meshfree methods should be used to get more realistic results.
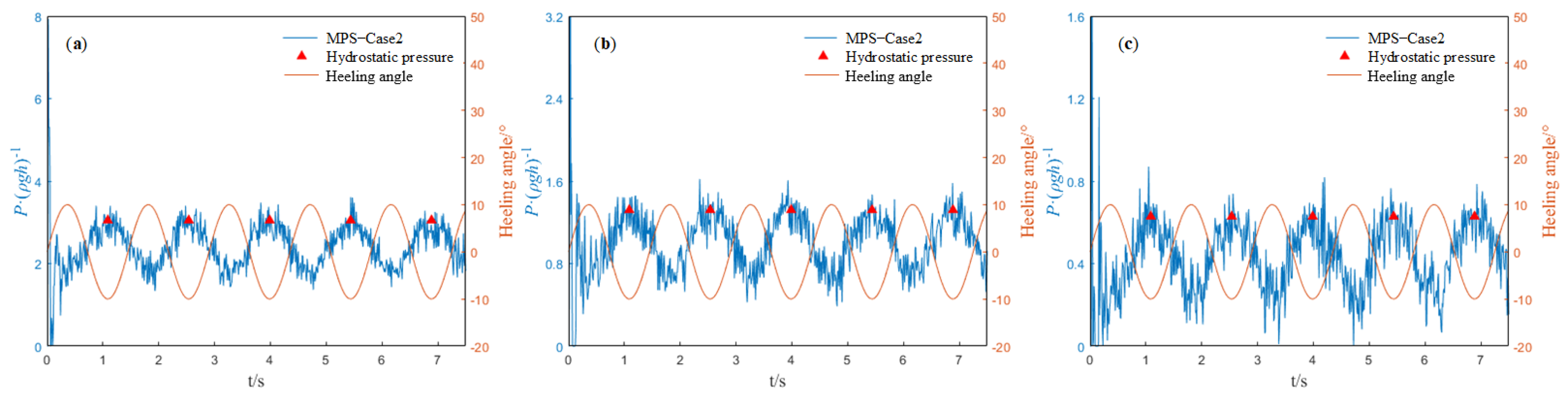
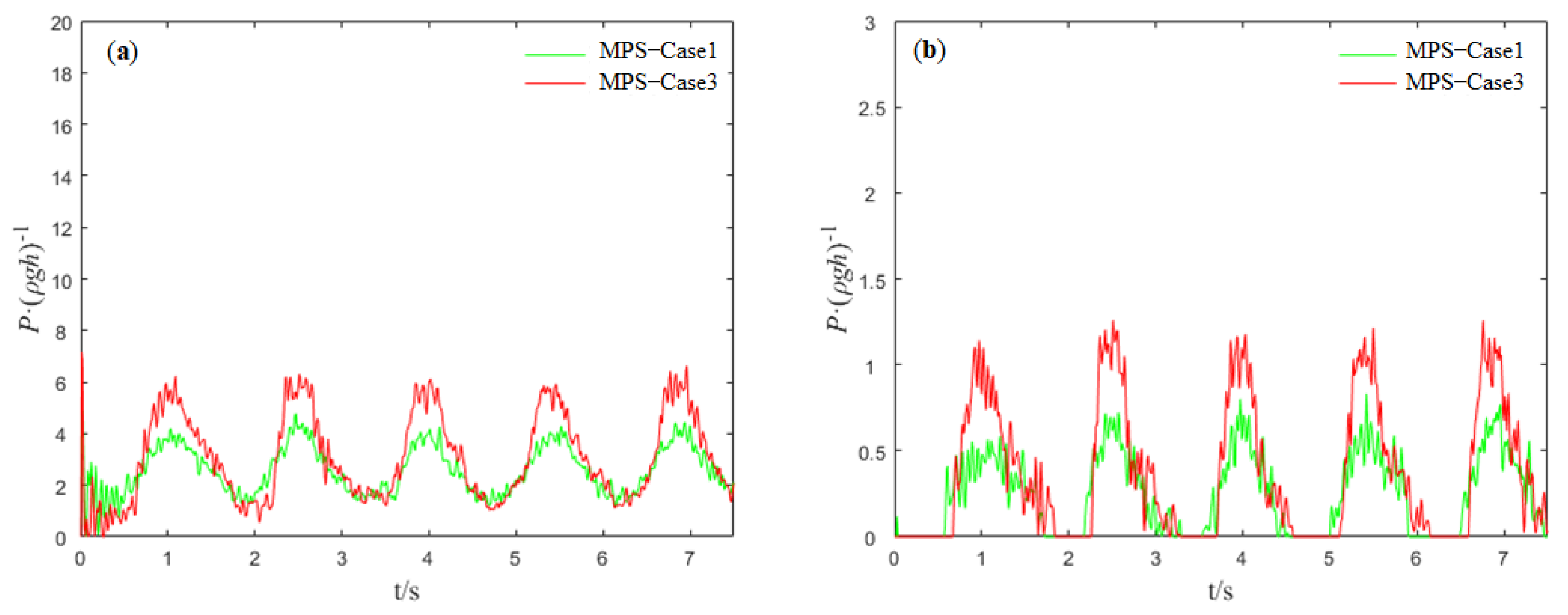
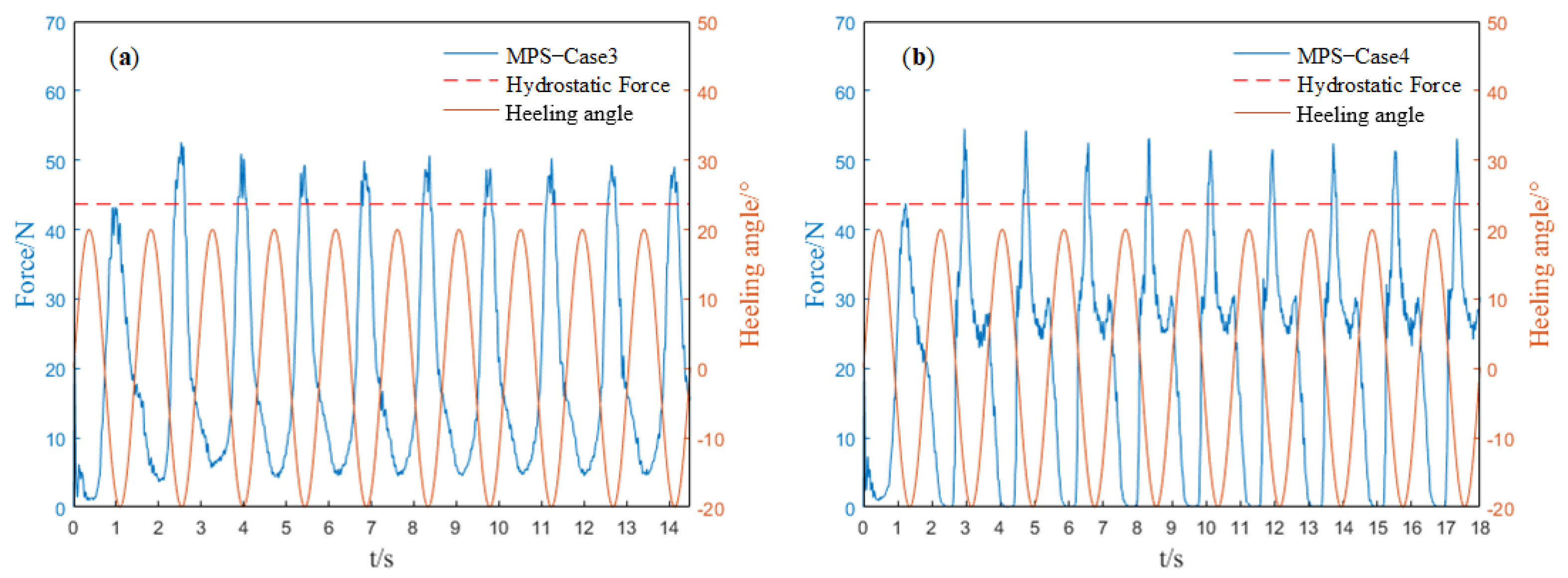
(2) The maximum sloshing-induced force is much bigger than the corresponding static one, e.g., 20% bigger in some cases. Meanwhile, both the rolling angle and period have significant effects on liquid sloshing. The sloshing intensity of the liquid in sloshing tanks is not positively correlated with the ship’s undamped natural rolling frequency.
(3) A large number of numerical simulations of liquid sloshing through a series of different ships’ undamped natural periods can be carried out. The relationship between the rolling periods and the liquid filling rates of the most violent liquid sloshing will be investigated. By establishing the database of this relationship, it can provide effective suggestions for ship operators, such as changing the ballast water to adjust the dynamic stability of the ship.
Although the MPS method has its own advantages, it also has the limitation of computing ability in dealing with large-scale violent free surface flow. This is the reason why this paper uses a scaled tank model to perform the simulation. Therefore, a more effective MPS method should be further investigated to simulate the liquid sloshing in all ship tanks of real size simultaneously.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}