
Optimization of Apron Support Vehicle Operation Scheduling Based on Multi-Layer Coding Genetic Algorithm


1
Aviation Engineering School, Air Force Engineering University, Xi’an 710038, China
2
Western Theater Air Force Survey and Design Institute, Chengdu 610000, China
*
Author to whom correspondence should be addressed.
Appl. Sci. 2022, 12(10), 5279; https://0-doi-org.brum.beds.ac.uk/10.3390/app12105279
Submission received: 14 April 2022
/
Revised: 12 May 2022
/
Accepted: 18 May 2022
/
Published: 23 May 2022
(This article belongs to the Topic Artificial Intelligence Models, Tools and Applications)
Abstract
:Operation scheduling of apron support vehicles is an important factor affecting aircraft support capability. However, at present, the traditional support methods have the problems of low utilization rate of support vehicles and low support efficiency in multi-aircraft support. In this paper, a vehicle scheduling model is constructed, and a multi-layer coding genetic algorithm is designed to solve the vehicle scheduling problem. In this paper, the apron support vehicle operation scheduling problem is regarded as a Resource-Constrained Project Scheduling Problem (RCPSP), and the support vehicles and their support procedures are adjusted via the sequential sorting method to achieve the optimization goals of shortening the support time and improving the vehicle utilization rate. Based on a specific example, the job scheduling before and after the optimization of the number of support vehicles is simulated using a multi-layer coding genetic algorithm. The results show that compared with the traditional support scheme, the vehicle scheduling time optimized via the multi-layer coding genetic algorithm is obviously shortened; after the number of vehicles is optimized, the support time is further shortened and the average utilization rate of vehicles is improved. Finally, the optimized apron support vehicle number configuration and the best scheduling scheme are given.
1. Introduction
Operation scheduling of apron support vehicles is an important support activity at the direct preparation stage of aircraft support. The aircraft support activities at this stage should be completed within the last 30 min before the flight time. Furthermore, the maintenance and support capability of the aircraft on the apron is related to the efficiency of the aircraft’s re-deployment [1,2].
The traditional apron support vehicle operation process is derived from the stand-alone preparation process, which is formulated by the support unit based on the daily support experience. This guarantee model can accurately guarantee each aircraft, reduce guarantee errors, and ensure guarantee quality. However, the traditional support mode often results in delayed aircraft support or long-time vacancy of the vehicle [3]; furthermore, the lack of a thorough scheduling plan causes the consequences of low support efficiency and waste of support resources [4,5].
In this case, people are accustomed to taking the ground dispatch service of the airport as a Vehicle Routing Problem with Time Windows (VRPTW) [6,7] by considering the utilization of the vehicle reuse rate, the minimum used vehicle or the constraints, such as parallel services to analyze the problem, and an ant colony optimization algorithm [8,9], genetic algorithm (GA) [10,11], greedy algorithm [12], or multi-objective optimization algorithm [13] to solve the problem of guaranteed vehicles scheduling. Solving the vehicle routing problem can guarantee the shortest driving path of the vehicle, thereby reducing the guaranteed time. However, in support tasks, facing time windows and resource constraints, consideration should be taken of how to maximize the allocation of existing resources to form the best job scheduling.
Many scholars regard the airport ground scheduling service problem as a Resource-Constrained Project Scheduling Problem (RCPSP) [14,15]. Under the premise of satisfying various constraints, the resources should be reasonably allocated and used [16,17] to reasonably schedule the internal activities of the project [18] and finally achieve the goals of compressing time and reducing costs. The RCPSP problem is an NP-hard problem. The support capability and resource configuration of vehicles are important factors to ensure vehicles on the apron. Li et al. [19] comprehensively evaluated the support capability of support vehicles from the perspectives of availability, mission success rate, and combat readiness rate, to find out the optimal configuration principle of support resources. Sheng et al. [20] established a model through orthogonal experimental design and simulation and believed that the number of refueling vehicles was greater than that of oxygen-filled vehicles. Wang et al. [21] and Zhang et al. [22] divided the support personnel into levels and realized the optimal configuration of the maximum efficiency of the support personnel by establishing a dynamic model. In terms of model establishment, Wang et al. [23] established a non-linear programming model featuring a balanced equipment utilization rate by using ranking theory to solve the optimal allocation scheme of support vehicles. However, only single-aircraft support was analyzed, and it was more inappropriate to prioritize the support vehicles with short working hours under the condition of multi-aircraft support. Some scholars have suggested a two-stage method [24] and a real-time scheduling algorithm [25] based on a heuristic algorithm to solve vehicle scheduling under multi-aircraft support. Han et al. [26] innovatively constructed a ferry vehicle capacity network by using the introduced virtual aircraft and ferry depots as nodes. In addition, based on the capacity network, a mixed-integer programming model was established to minimize the number of ferry vehicles required. To determine the appropriate vehicle scheduling scheme, Widemann et al. [27] used data management techniques to select the most appropriate option based on the relative position of the vehicles to the task assignment location, to link tasks and resources in the flight plan. Zhao et al. [28] analyzed the cooperative scheduling problem of airport ferry vehicles and tractors and established a dual-objective mixed-integer programming model to solve this problem. Gui-hong et al. [29] used a particle swarm optimization algorithm to find the optimal position and global optimal position of each vehicle so as to obtain the aircraft sequence and service schedule that the vehicle should follow. The research conducted in the above-mentioned literature mainly aimed at the operation scheduling of a single support vehicle, and there is a lack of complete research on how to configure multiple support vehicles in the case of multi-aircraft support and how to coordinate support operations for multiple support vehicles.
In comparison with the traditional support vehicle scheduling problem, this paper analyzes the problems of different aircraft quantities, different support vehicle quantities, and different support processes and optimizes the number of scheduling objects and processes by designing a multi-layer coding genetic algorithm. Meanwhile, the model is constrained according to the actual guarantee requirements, and the problem of variable change is solved by improving the coding method. Intelligent algorithms have been widely used in solving such problems, including the genetic algorithm [30,31], tabu search algorithm [32], ant colony algorithm [33], decentralized search algorithm [34], etc. The genetic algorithm features excellent global optimization ability and strong robustness and is one of the best algorithms for solving global problems [30,35]. The genetic algorithm has become one of the best algorithms to deal with global problems because of its excellent global optimization ability, strong robustness, strong universality, and computational performance. However, the genetic algorithm also has the problems of premature convergence and low searching efficiency in the later stage. At the same time, the information cannot be expressed when the genetic algorithm solves complex problems. The multi-layer coding method is suitable for complex research objects; it divides individuals into multiple layers, and each layer represents different meanings. Chromosomes can better and fully express the information about the number of vehicles and the guarantee process. The results of this paper confirm the feasibility of the algorithm. With the full dispatching of the support vehicles, the support time is reduced, the vehicle utilization rate is improved to the greatest extent, and the departure efficiency of the aircraft is increased, providing a solution for the operation scheduling problem of apron support vehicles.
2. Operation Analysis of Apron Support Vehicles
2.1. Operation Process of Apron Support Vehicles
The difference between flight missions results in various aircraft apron support operations and in turn increases the types and quantities of equipment involved. However, regardless of whether it is a large aircraft or a small one, the operation process is basically the same. Taking the aircraft departure process as the mainline, based on the typical support process, the apron support vehicle operation can be divided into several stages, as shown in Figure 1.
It can be seen from Figure 1, notified by the aircraft unit, the airport support personnel and equipment enter the airport orderly. Following the professional service support procedures, contents, and requirements, the support teams carry out the support preparation work and serve in advance to ensure the direct preparation of the aircraft. The apron support vehicle operation is based on the demand of aircraft centering around the direct preparation of aircraft, and the professional service support force is concentrated to complete the completion of the service support work. The main guarantee work includes the start of the apron support operation, aircraft traction, aircraft refueling, aircraft oxygenation, aircraft charging, hanging weapons, and calibration inertial navigation. At the same time, the aircraft inspection is carried out by the mechanic review, which is followed by pilot inspection and acceptance. The acceptance of the inspection indicates the accomplishment of the direct aircraft preparation work. The apron guarantee vehicle operation is over after the flight order.
According to the literature [11,24], though there is no sequence for refueling, oxygenation, and charging, they cannot be carried out at the same time. The maintenance inspection work can be carried out during these support works. After the inspection work is completed, it can be carried out. After that, nobody is allowed to enter the cockpit before the pilot checks and accepts it.
2.2. Contents of Apron Support Operations
The apron support operation is based on the crew responsibility system, and the ground crew is responsible for the maintenance of the aircraft and the quality of the flight. The ground crew is mainly composed of four professional support personnel, including machinery, avionics, ordnance, and ad hoc, who provide full-time service support for the aircraft assigned to them. Under the unified leadership of the mechanic, each crew member completes the maintenance work required by the flight mission. The major part of the apron support operation is the maintenance work, and service equipment is required in each professional maintenance operation. The professional service support equipment on the apron is mainly based on various support vehicles, mainly including tractors, oxygen refilling trucks, power vans, refueling trucks, and loaders of air-launched weapons. The main tasks of each major are shown in Table 1.
3. Modeling of Apron Support Vehicle Operation Scheduling Problem
3.1. Problem Description
The actual apron support vehicle operation is very complicated, involving a lot of support equipment and support personnel. For better understanding of the problem, the apron support vehicle operation is simplified into 7 stages, as shown in Figure 1.
The scheduling problem of apron support vehicles is that m types of support vehicles are used to serve n aircraft. Each aircraft has to go through P support processes, and each support process requires a certain operating time. At the same time, each support vehicle can only support one aircraft, and one operation of each aircraft can only be completed by one support vehicle. The sequence of support operations for each aircraft and the support process of the support vehicle is random. The purpose of the support operation scheduling is to determine the process combination of all aircraft and support vehicles under the condition that a certain number of support vehicles are satisfied, so as to minimize the total support operation time.
According to the actual situation of the apron support vehicle operation, the following assumptions are made for the scheduling problem of the apron support vehicle operation:
- (1)
- The travel time of the support vehicle is ignored, and only the support operation time is calculated;
- (2)
- The problems of aircraft towing, bomb hanging, calibration of inertial navigation, and inspection and acceptance are free from resource constraints;
- (3)
- Each support operation of the aircraft requires only one type of support vehicle for one service;
- (4)
- For a certain type of aircraft, the operating hours of the guaranteed vehicles are the same;
- (5)
- The contents of support operations for all aircraft are independent of each other, and there is no mutual restraint between aircraft;
- (6)
- A guaranteed vehicle can only serve one aircraft at the same time;
- (7)
- Each aircraft must complete all support operations;
- (8)
- The support vehicle is allowed to be idle and the aircraft to wait for the support vehicle;
- (9)
- Once the vehicle starts, the support operation to a certain aircraft starts, and there is no interruption until the service support operation is completed;
- (10)
- The resources carried by each support vehicle are sufficient or can be replenished in time, without affecting the aircraft support mission.
In this paper, the guarantee processes such as refueling, charging, and oxygenation are selected as the research objects. Before the start of the support task, all support vehicles should prepare for the approach and resources in advance. In comparison with the support time, the scheduling time of support vehicles among support aircraft can be neglected. Simultaneously, the same support operation time of the same model has a small difference, so it can be regarded as equal. The assumption is based on the actual situation, and at the same time, it highlights the operation scheduling link of support vehicles, which is applicable and effective for most support vehicle operation scheduling. The notations and their definitions appearing in this paper are shown in Table 2.
3.2. Construct Mathematical Model
The scheduling of apron support vehicles is the RCPSP. The scheduling process of the security vehicles needs to be sorted by assigning tasks to the processor to optimize the objective function and complete certain tasks under certain constraints. If each task needs to work on each processor with an arbitrary order of jobs, it is called a free-order job. It is convenient to simplify the expression of the problem and use the triple (α|β|γ) to describe the problem [36,37]. A typical free-order problem expression is:
where Om refers to m processors; Cmax represents the time objective function, Cmax = max{Cj}, which is equal to the end time of the last completed task; P stands for the job time matrix, representing the time when the j task completes the corresponding job on the i processor.
Since the oxygenation, charging, and refueling in apron support preparations are not strictly sequenced, this problem belongs to free-sequence or open operations. The objective function of the mathematical model for the scheduling of apron support vehicles is expressed as follows [38]:
The constraints are as follows:
Formula (2) indicates that the minimum time for ground support operation is the longest time for Mij to finish operation. Formula (3) guarantees that the support operation time is always no less than that of a certain support operation; Formulas (4)–(6) ensure that the support operation is a free sequence operation; Formula (7) gives the range of decision variables; Formulas (8) and (9) give the way to determine the decision variables.
3.3. Empirical Method of Apron Support Vehicle Operation Scheduling
Through investigation of the airport, it is found that in aircraft support work, the method of sequential sorting is generally used for multi-aircraft support scheduling. Specifically, before the aircraft takes off, refueling, oxygenation, and charging inspection must be completed, and various operations cannot be carried out at the same time. Furthermore, there is competition for resources due to the limited amount of refueling, oxygenation, and charging equipment. In addition to the highest priority of the refueling operation for aircraft support, the rest of the operations are carried out in sequence according to the length of time, that is, refueling → oxygenation → charging, so that the working time delay is minimized. To a certain extent, the apron has been regulated to ensure the order of vehicles. Assuming that there are 6 aircraft of a certain type to be completed, there are 3 types of support equipment, one for each of the power van (P1), the oxygen refilling truck (P2), and the refueling truck (P3). The three basic preparations for refueling ensure that the aircraft numbers are J1, J2,..., J6. Since the models are the same, the guaranteed time for the same type of work is considered to be equal, and the guaranteed time is ti (i = 1, 2, 3).
Taking the protection of 6 aircraft as an example, the specific steps of the traditional apron support vehicle operation scheduling based on the sequential sorting method are as follows:
- (1)
- Sort ti, t1 < t2 < t3.
- (2)
- Use the sequential sorting method for optimal sorting:The support vehicle P3 performs support operations on J1, J2, …, J6 in sequence;The support vehicle P2 performs support operations on J1, J2, …, J6 in sequence;The support vehicle P1 performs support operations on J1, J2, …, J6 in sequence.
- (3)
- Implement support operations.
When there is more than one support vehicle of the same type, the support vehicles are grouped first, and then, the operations are carried out in sequence.
4. Design of Multi-Layer Coding Genetic Algorithm
GA has excellent global optimization ability and strong robustness, which is one of the best algorithms to solve global problems. Firstly, GA initializes population M containing a feasible solution to the problem and then randomly selects two individuals P1 and P2 from M as parents. It then generates a sub-solution C with less cost via crossover and uses mutation to optimize the sub-solution again. M will be updated when a better solution S is obtained. The description of GA is shown in Algorithm 1, and the flowchart is shown in Figure 2.
| Algorithm 1 Overview of GA | |
| 1: | Initialize the population m |
| 2: | for i = 0→max do |
| 3: | (a) Two parent P1 and P2 are selected from the population m |
| 4: | (b) Use the crossover algorithm to get an offspring C |
| 5: | (c) Educate the offspring C with the mutation algorithm to obtain the new solution S |
| 6: | (d) Update the population M with S |
| 7: | end for |
| 8: | Return the solution S with minimum C in the population m |
With the traditional genetic algorithm, chromosomes can easily solve the potential solutions of simple problems, but for more complex problems, it is difficult for one chromosome to accurately express the solution of the problem, and the information cannot be fully expressed [39]. The multi-layer coding method is very suitable for complex research objects. It can divide individuals into multiple layers, and each layer of coding can represent different meanings. Via multi-layer coding, many parameters of the problem and the final solution are completely expressed. Thus, for problems with multiple variables, chromosomes can express the information more completely. In the following, the design steps of multi-layer coding genetic algorithm are introduced in detail.
4.1. Individual Coding
Using the model proposed in this paper, the chromosome coding method adopts integer coding, and each chromosome individual represents a feasible solution to the problem for optimization. At the same time, the coding process has to reflect the aircraft support operation process and the support vehicle serial number of the current module. To solve the variable problem caused by the change of the number of support objects, and to ensure the same coding dimensions of the aircraft support operation process and the support vehicle serial number, this result cannot be achieved by using the commonly used coding methods in the past. In the improved coding method, the chromosomal coding is divided into two layers, i.e., the first half of the support operation process of the aircraft and the second half of the support vehicle serial number corresponding to each support process. For example, for the individual [123321213123321213], the individual represents the support sequence of the aircraft with 3 support procedures on the 3 support vehicles. Among them, the first half represents the support order of the aircraft, that is, Aircraft 1 → Aircraft 2 → Aircraft 3 → Aircraft 3 → Aircraft 2 → Aircraft 1 → Aircraft 2 → Aircraft 1 → Aircraft 3; the second half represents the support vehicle, that is, Vehicle 1 → Vehicle 2 → Vehicle 3 → Vehicle 3 → Vehicle 2 → Vehicle 1 → Vehicle 2 → Vehicle 1 → Vehicle 3.
The specific implementation process is described as follows: in this case, when the number of guaranteed aircraft is n, and the guaranteed process of aircraft is an integer string with a chromosome length of
is generated.
4.2. Fitness Value
The fitness value function is the criterion for the evaluation of the pros and cons of the plan. In general, the value of the objective function is converted into the fitness value of the corresponding chromosome. Combined with the scheduling model established in this paper, the time required to complete all aircraft support tasks is expressed as the chromosome. The fitness value of its calculation formula is as expressed as follows:
When calculating the fitness function value according to the formed chromosome, in the case of a small fitness value, the scheduling scheme corresponding to the chromosome will be better. In other words, the shorter the time to complete all aircraft support, the better the chromosome.
4.3. Selection
In the selection operation, the roulette method is used to pick up the chromosomes with better fitness values. The roulette method will refer to the fitness value of the previous generation of individuals when selecting individuals, so that individuals with large fitness values have a greater probability to be retained. In the next step, the probability of an individual being selected is shown in Formula (11):
4.4. Crossover Operation
The crossover operation is one of the main operations of chromosome evolution. New chromosomes are obtained through the crossover operation between chromosomes, thereby promoting the evolution of the entire population. In this paper, the integer crossover method is adopted in a crossover operation. Firstly, two chromosomes are randomly selected from the population as parent chromosomes, and the first half of each chromosome is taken out for crossover. After that, the crossover position is randomly selected for crossover. In the case that the crossover position is 4, the parent chromosome is crossed from the starting position to the crossover position, and only the first half of the individual is crossed. The operation method is described as follows.
Individual 1 [112322331112121222] crosses over to get [221322331112121222].
Individual 2 [221331213112212111] crosses over to get [112331213112212111].
At the completion of the chromosome crossover, errors may occur. For example, the support process 2 of individual 1 aircraft is redundant, and support process 1 of the aircraft is missing. In view of the changes after the crossover, it is necessary to convert the redundant aircraft process into the missing aircraft process, thereby making it conform to the normal guarantee process. The repair method is as follows: change the redundant safeguard process that appears for the first time after the intersection into the missing safeguard process; at the same time, transform the safeguard vehicle corresponding to the missing process, as shown below:
After crossover, individual 1 [221322331112121222] is adjusted to [221312331112221222].
4.5. Mutation Operation
The population obtains new individuals through mutation operations, increasing the diversity of the population and promoting the evolution of the entire population. During the mutation operation, the mutant individuals are randomly selected from the population, and then, the mutation positions Pos1 and Pos2 are randomly selected. Finally, the aircraft processes of Pos1 and Pos2 in the individual and the corresponding security vehicle serial numbers are exchanged to generate new chromosomes. Suppose the intersection positions are 2 and 4 as follows:
Individual 1 [221322331112121222] mutates to get [231222331112121222].
5. Examples of Scheduling Optimization of Apron Support Vehicles
In this paper, certain apron support is taken as the scheduling optimization object, and a certain type of aircraft at the airport is used as an example for analysis. The average support time of each support vehicle is shown in Table 3. The basic parameters of the multi-layer coding genetic algorithm are set as follows: the population number is 40; the maximum number of iterations is 50; the crossover probability is 0.8; the mutation probability is 0.6, and the specific code is implemented in Matlab. They are simulated in the environment of Windows 10 operating system with Intel® CoreTM i7-11800H CPU 2.30 GHz.
The apron support operation in the direct aircraft preparation stage must be completed within 120 min. To ensure the smooth completion of other support operations and shorten the support time to the maximum extent, it is stipulated that the completion time of the three tasks of refueling, oxygenation, and charging shall be controlled within 120 min.
Power vans, oxygenation refilling trucks, and refueling trucks are the optimization objects for the operation scheduling of apron support vehicles. The operating positions of the three types of support vehicles at the airport are shown in Figure 3. There is no conflict of operation positions among the support vehicles, and it is ignored. The travel time of the vehicle is guaranteed, thereby satisfying all the previous assumptions.
5.1. Simulation 1: Traditional Assurance Model
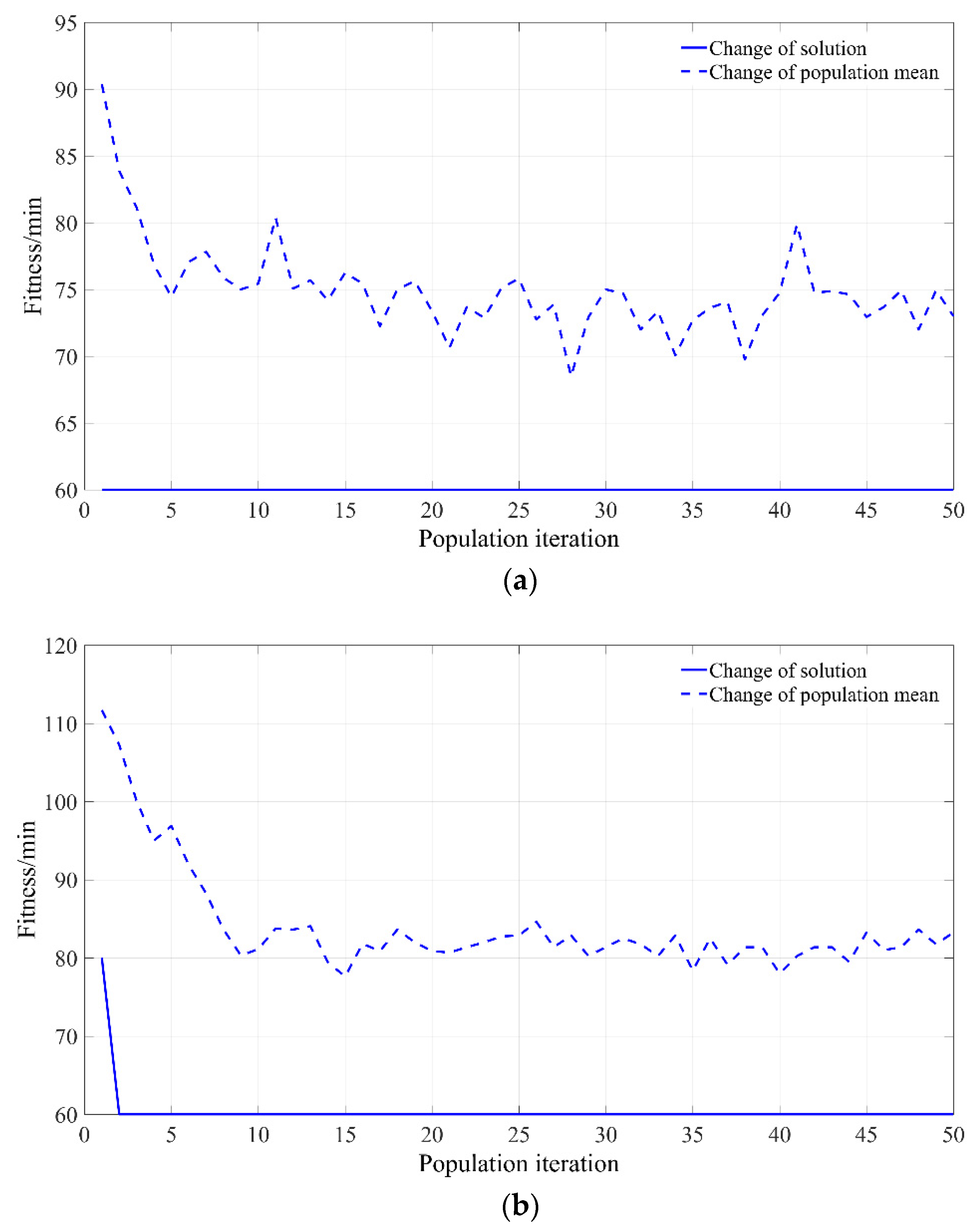
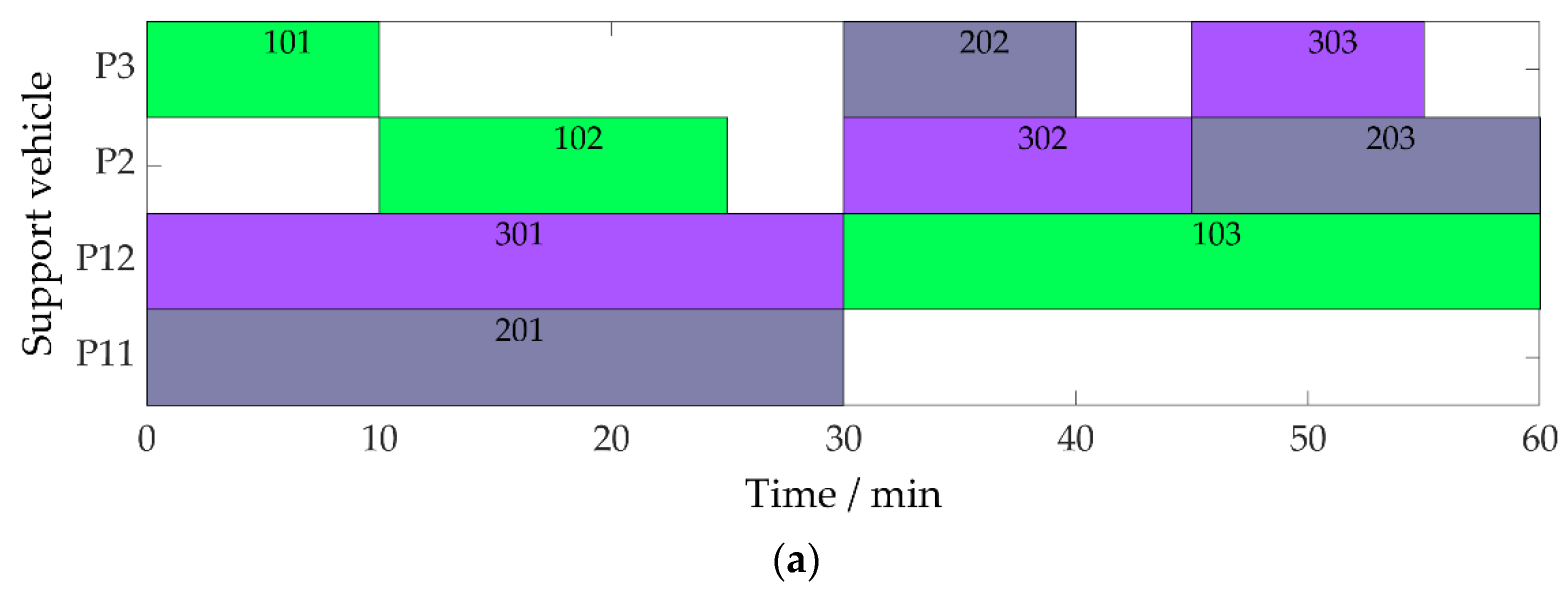
Based on the support experience, usually a maximum of 6 aircraft are dispatched in a single batch. Combined with the daily support experience of the airport, the quantity configuration of each support vehicle is shown in Table 4. By optimizing the apron vehicle support operation scheduling when 3, 4, 5, and 6 aircraft are dispatched, the population fitness value changes are obtained, as shown in Figure 4. The guaranteed vehicle utilization rate and three job completion time statistics before and after scheduling optimization are shown in Table 5. In addition, the vehicle scheduling scheme is shown in Figure 5.
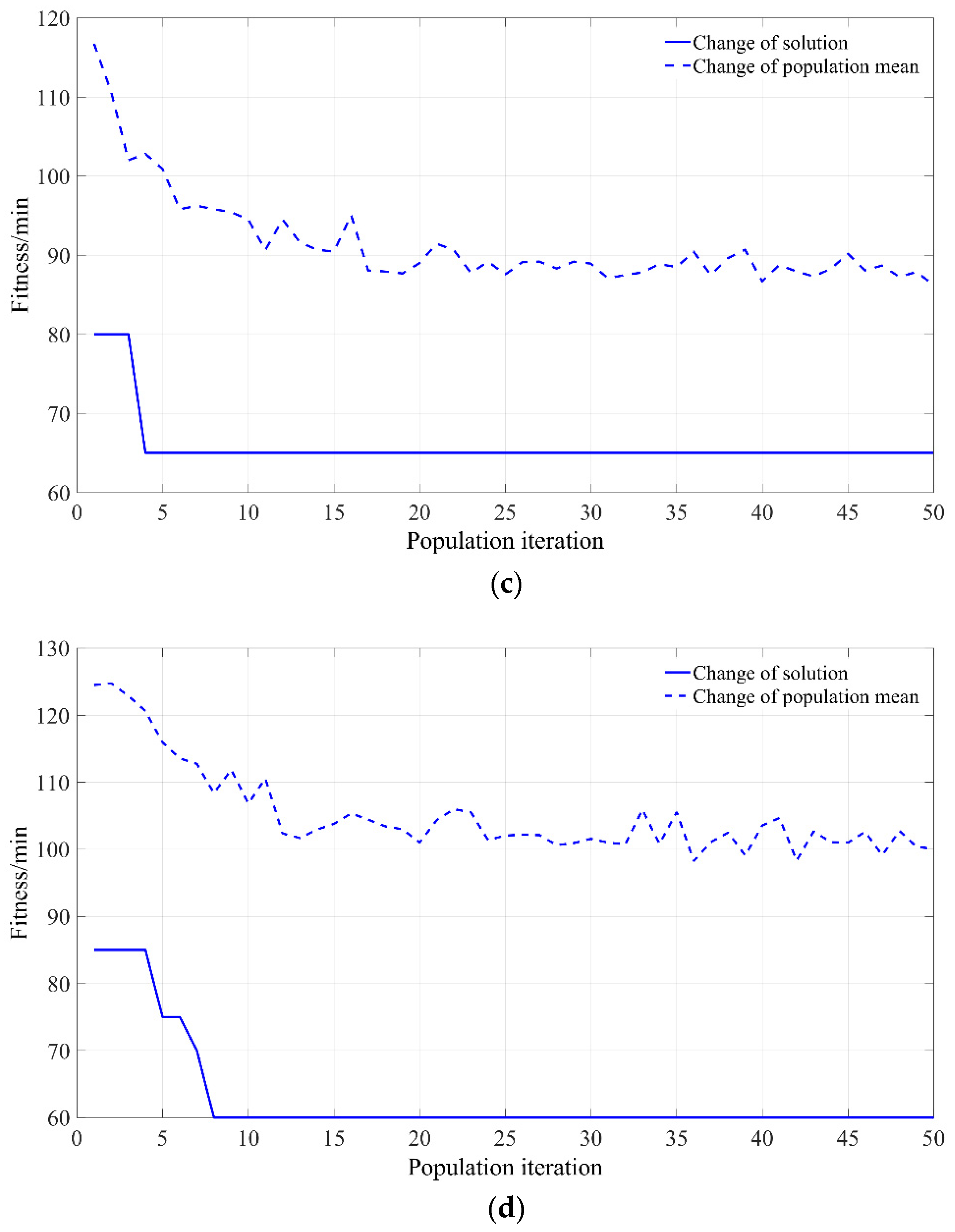
It can be seen from Figure 4 that with the increase of the number of iterations, the average fitness value of the population tends to be stable. After 50 iterations, the fitness value of the population converges, and the corresponding shortest times are 90 min, 60 min, 90 min, and 90 min, respectively, indicating that the multi-layer coding genetic algorithm is feasible to solve the optimization problem of vehicle operation scheduling for vehicles with 3 to 6 vehicles on the apron.
- (1)
- Optimization of vehicle operation scheduling guaranteed by 3 aircraft
For the 3-aircraft support, the support vehicle completes the support operations of the 3 aircraft in turn in the sequence of refueling → oxygenation → charging. From Figure 4a, it can be seen that the population fitness value is stable at 90 min, and the population average value is stable at 90 min. While the population fitness value remains unchanged, the reason for the change of population mean is that there are fewer support vehicles, the corresponding support process is simple and clear, and the corresponding solution process is relatively simple. It can be seen from Table 5 that the utilization rate of the refueling truck before and after optimization is 100%. After scheduling optimization, the utilization rate of the oxygenation refilling truck and power van has increased by a large margin. Specifically, the utilization rate of oxygenation refilling trucks has increased from 42.9% to 81.8% and that of power vans has increased from 26.1% to 42.9%, thereby improving the resource utilization efficiency of support vehicles and reducing the waste of resources. At the same time, the completion time of the three tasks after optimization was 90 min, that is, a saving of 25 min compared with 115 min before optimization.
- (2)
- Optimization of vehicle operation scheduling supported by 4 aircraft
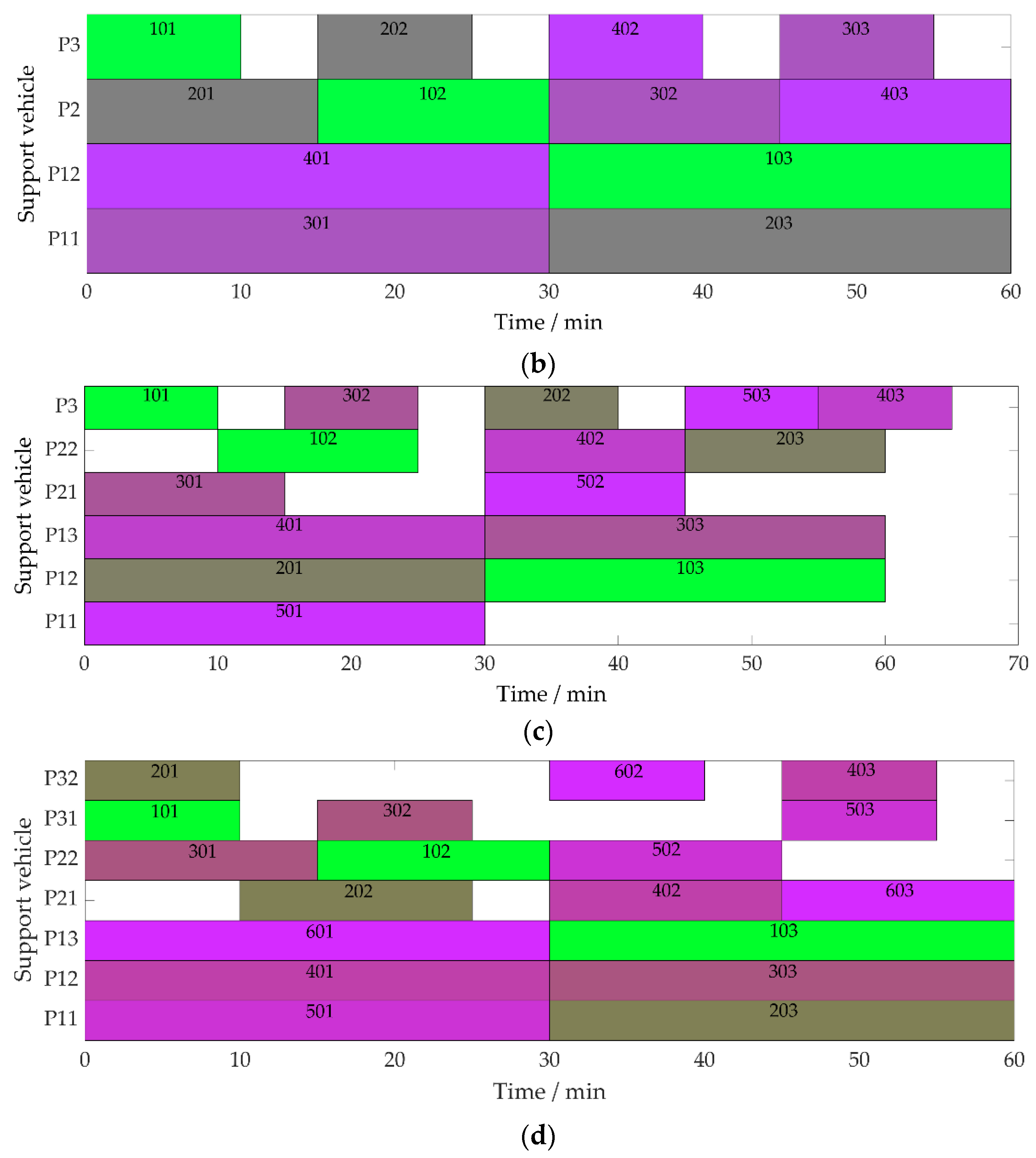
For the 4-aircraft support, XX refueling trucks support 2 aircraft, respectively, and then complete the 4-aircraft support operations in sequence in the sequence of oxygenation → charging. Figure 4b shows that the population fitness value is stable at 60 min, and the population average value is stable at 87 min. The same situation occurred here, where the population fitness value remained unchanged, while the population mean value changed, for the same reason as for the 3 aircraft. As can be seen from Table 5, the utilization rate of the refueling truck before and after optimization is 100%. However, the utilization rate of the optimized oxygenated car and power car has been greatly improved. Specifically, the utilization rate of the oxygenated car has increased from 66.7% to 100% and that of power car 1 and 2 has increased from 28.6% to 40% and from 20% to 54.5%, respectively. Therefore, scheduling optimization improves the equipment resource utilization of oxygen vehicles and power vehicles to a certain extent, shortens the waiting time, and reduces the waste of guaranteed resources. At the same time, the completion time of the three tasks after optimization is 60 min, that is, 40 min less than the 100 min before optimization.
- (3)
- Optimization of vehicle operation scheduling supported by 5 aircraft
For the 5-aircraft support, 2 refueling trucks and 2 power supply trucks protect 2 aircraft and 3 aircraft, respectively. According to the sequence of refueling → oxygenation → charging, the 5-aircraft support operations are completed in turn. Figure 4c shows that the population fitness value is stable at 90 min, and the population average value is stable at 117 min. The population fitness value changed after 45 iterations. In order to ensure that the population fitness value did not change after 50 iterations, it was repeated 100 times, and the result did not change, and it can ensure the applicability of 50 iterations to 5-aircraft support. It can be seen from Table 5 that the utilization rate of refueling truck 1 before and after optimization is 100%, and that of refueling truck 2 after optimization is reduced from 100% to 66.7%. However, the utilization rate of the oxygenation refilling truck and power vans has been greatly improved. The utilization rate of the oxygenation refilling truck and the power van 1 has increased from 71.4% to 88.23% and from 35.3% to 50%, respectively. Furthermore, the utilization rate of power van 2 has increased from 17.4% to 100%. Therefore, scheduling optimization improves the equipment resource utilization rate of the oxygenation refilling truck and power vans to a certain extent. However, the utilization rate of refueling vehicle 2 decreases. The most important thing is that the three jobs were completed within 90 min after optimization, which is 25 min, that is, less than 115 min before optimization.
- (4)
- Optimization of vehicle operation scheduling guaranteed by 6 aircraft
For the 6-aircraft support, each refueling truck and power van protects 2 aircraft and completes the 6-aircraft support operation in the sequence of refueling → oxygenation → charging. Figure 4d shows that the population fitness value is stable at 90 min, and the population average value is stable at 118 min. As can be seen from Table 5, the utilization rate of the top 3 refueling trucks is 100%. After optimization, the utilization rate of refueling trucks decreases slightly. Specifically, the rates of refueling truck 1 and 2 drop to 66.7%, and that of refueling truck 3 drops to 85.7%. However, the utilization rate of the optimized oxygenation car and power van has increased significantly, and the utilization rate of the oxygenation car and the power van has increased from 75% to 100%; specifically, the utilization rate of power van 1 and 2 has increased from 28.6% to 100% and from 20% to 100%, respectively. Moreover, the rate of power van 3 has increased from 15.4% to 100%. At the same time, the total time of the three tasks after scheduling optimization is 90 min, which is 40 min shorter than the previous 130 min.
For single-aircraft and dual-aircraft vehicle scheduling operations, the optimal scheduling method is as described above with the results shown in Table 6.
Except for 1–2 aircraft, the operation scheduling of 3–6 aircraft has been improved to varying degrees, the support time has been shortened to varying degrees, and the utilization rate of support vehicles has been significantly improved. The main reasons are as follows: through scheduling optimization, the waiting time of support vehicles is reduced, and the connection between support processes is more compact. In addition, the job scheduling process is clearer, the guarantee order is more orderly, and the utilization rate of resources is improved.
5.2. Simulation 2: Configuration Optimization of Support Vehicle Quantity
Through the optimization of support vehicle scheduling, the guarantee process of refueling trucks, oxygenation refilling trucks, and power vans for different numbers of aircraft can be obtained. For a certain number of guaranteed vehicles, by optimizing the guarantee process of guaranteed vehicles, the guarantee is improved. With the increase of working efficiency of the vehicle, the guaranteed time is greatly shortened, which is beneficial to the management of the apron vehicles.
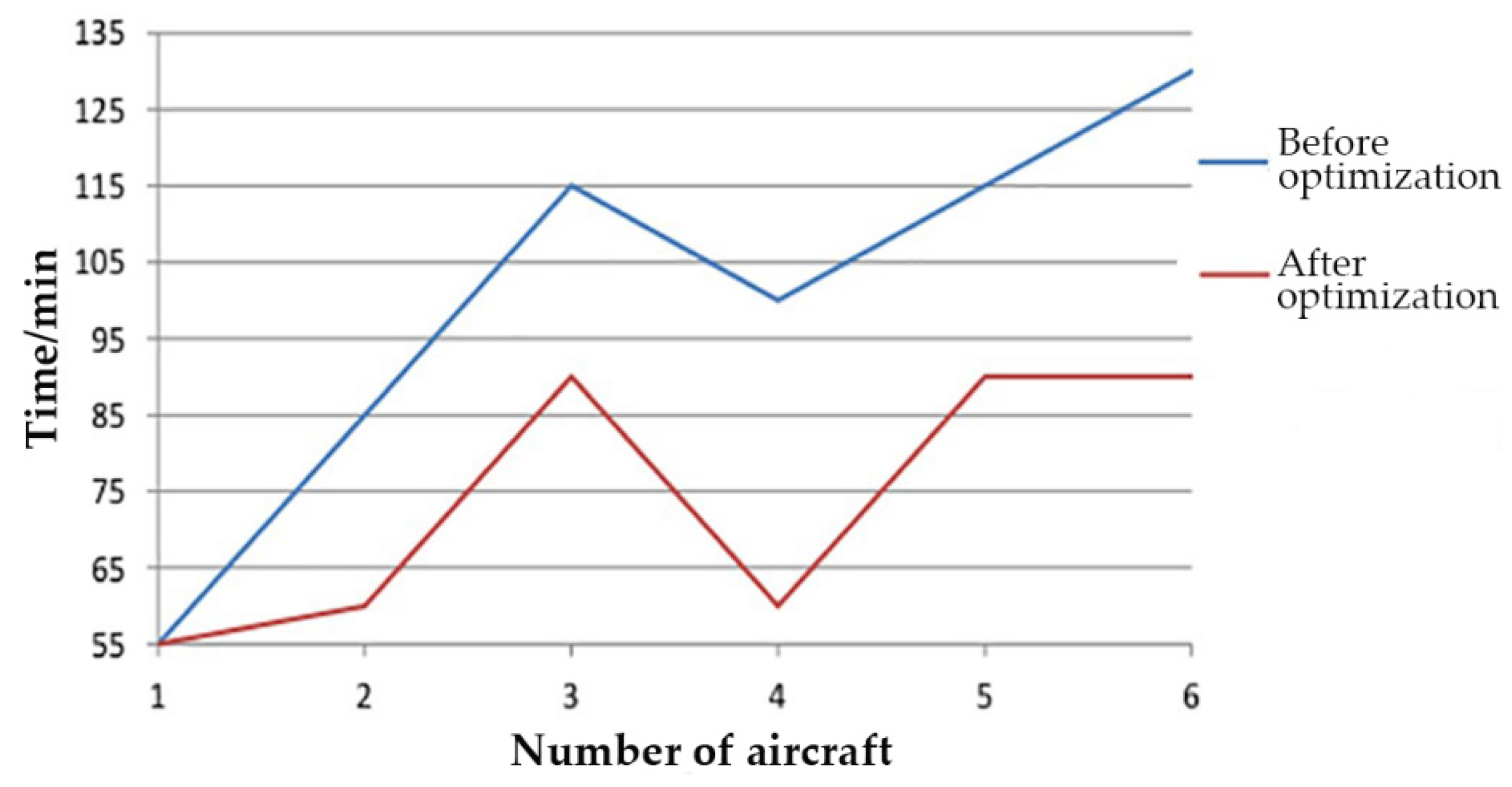
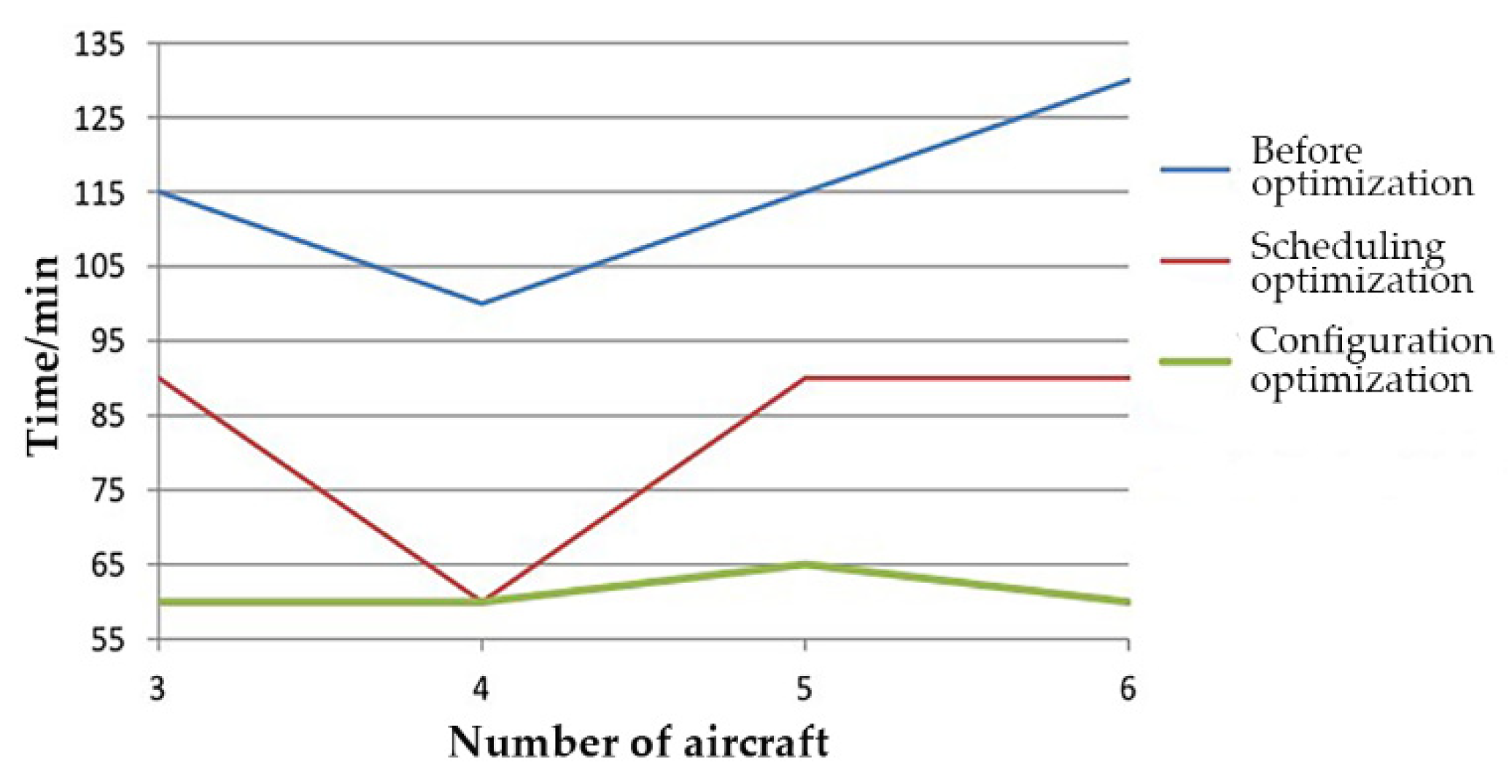
The relationship between the number of aircraft supported by multiple aircraft and the total time of the three support tasks is shown in Figure 6. It can be seen from the data in the figure that as the number of aircraft increases, the time to complete the three support tasks using the traditional support vehicle scheduling method gradually increases. When it exceeds 4 aircraft, the support time shows a linearly upward trend, and the support time of 6 aircraft has exceeded 120 min.
The scheduling method based on the multi-layer coding genetic algorithm can greatly shorten the support time of the three tasks and improve support efficiency. In the actual aircraft support process, due to the limitations of facilities and equipment, such as runways, power supply air-conditioning vehicles, and combat methods, the maximum number of sorties in a single batch is six. According to the calculation, the average time to complete the single-aircraft to six-aircraft support operation after optimization is 74 min, which can meet the actual needs, and the average time before optimization is 100 min, which can also meet the training needs. However, with the further increase of the number of support aircraft, the traditional support model will definitely fail to meet the total time requirement. To shorten the support time, the airport’s usual practice is to increase the number of support vehicles in the form that a group of support vehicles is responsible for two aircraft. Although requirement of the guaranteed time has been satisfied, the number of guarantee vehicles suffers a sharp increase, resulting in the difficulty of management and scheduling and increasing the safety risk of the apron. The scheduling operation method of the optimization algorithm, under the limit of the guaranteed number of vehicles, can be used to obtain the scheduling process in the shortest time through the optimization of the work sequence, thereby further shortening the guaranteed time and improving the guaranteed efficiency.
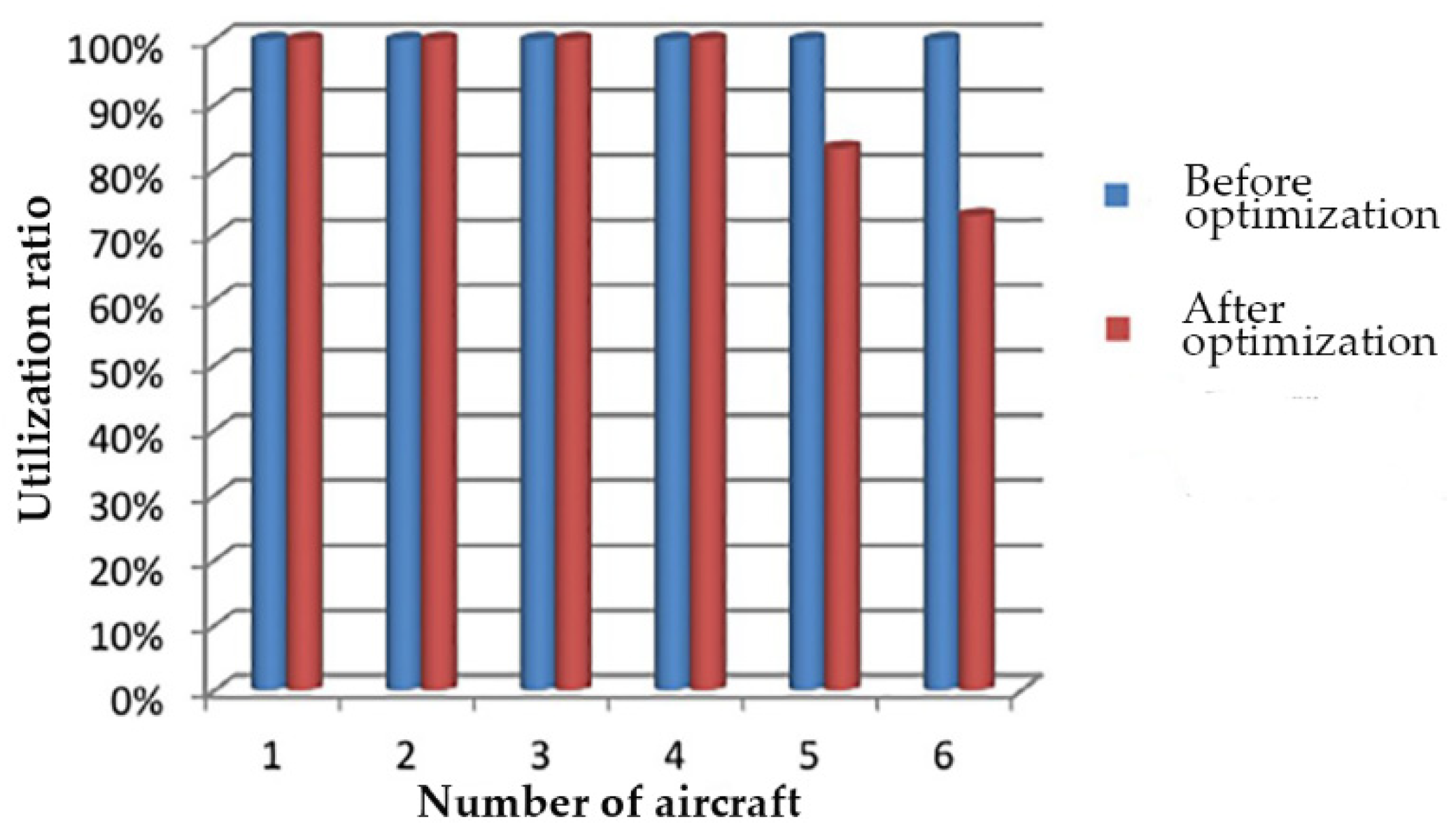
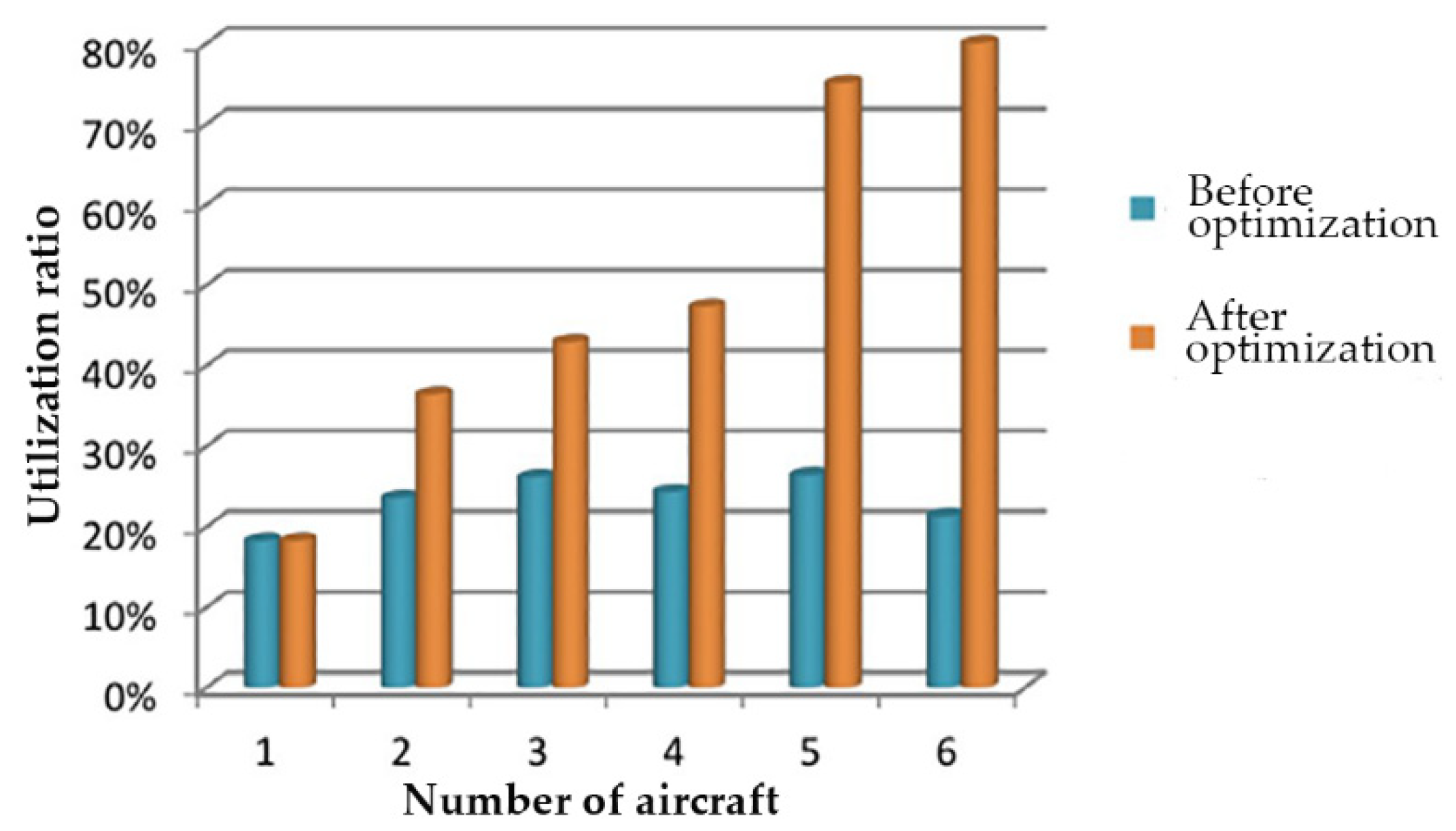
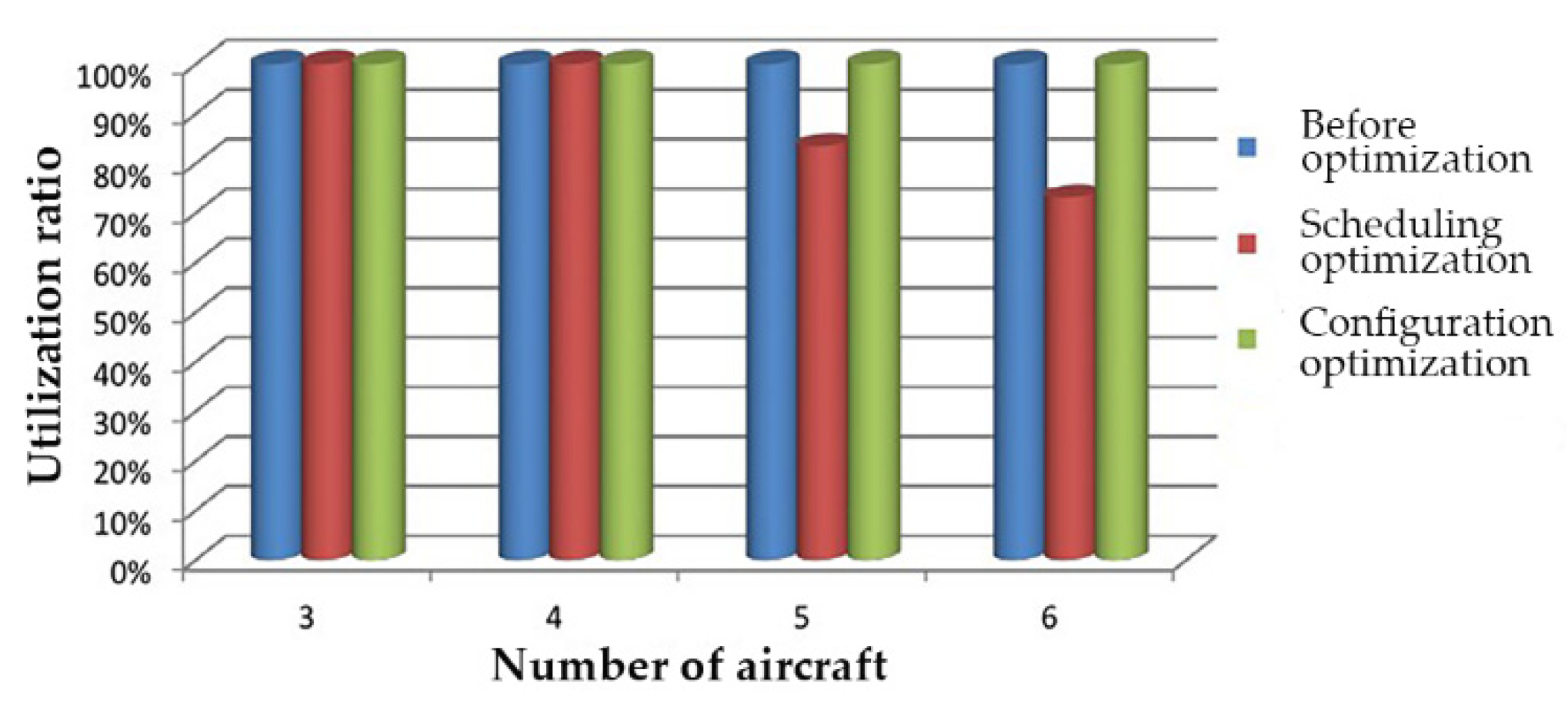
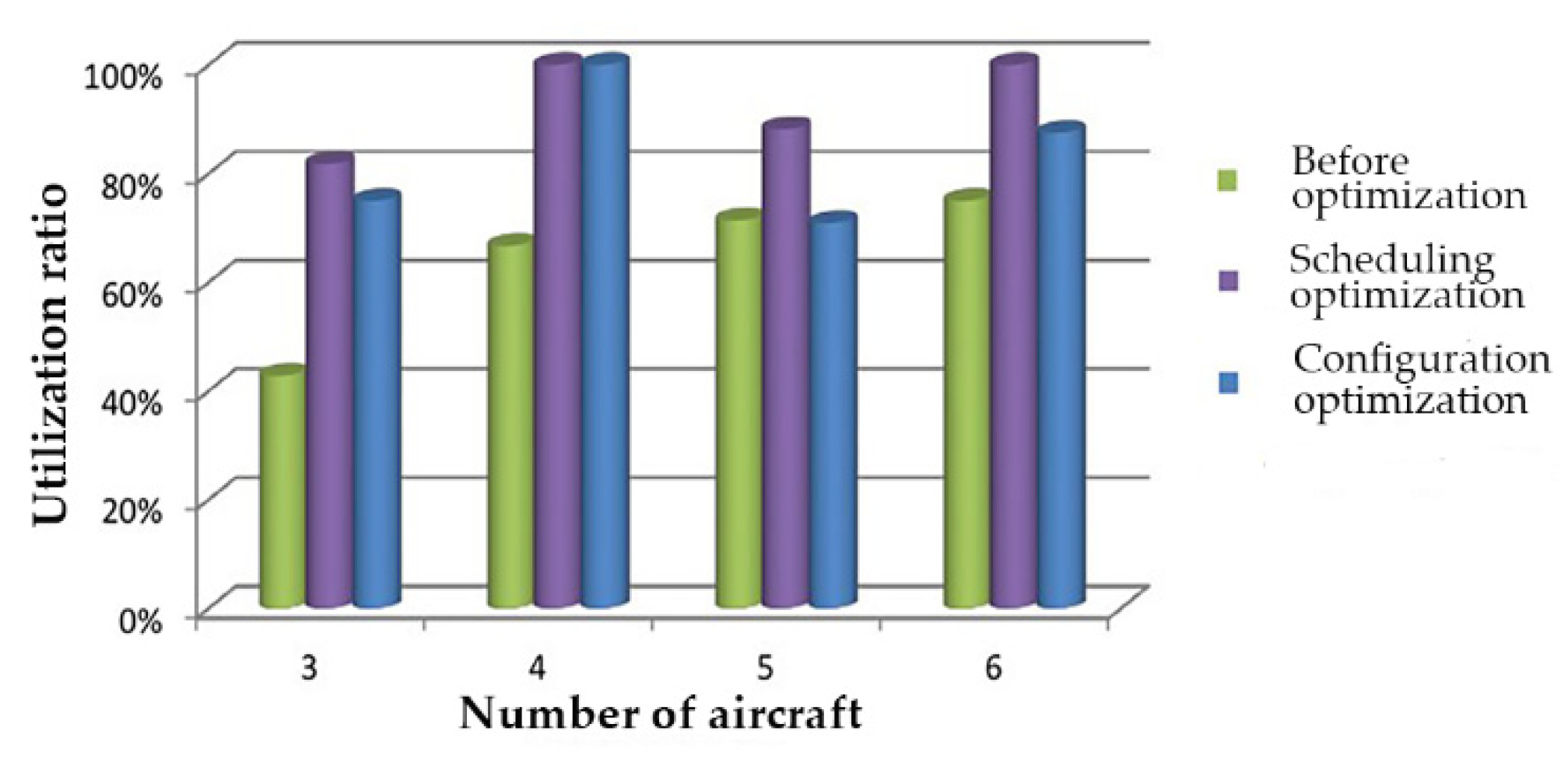
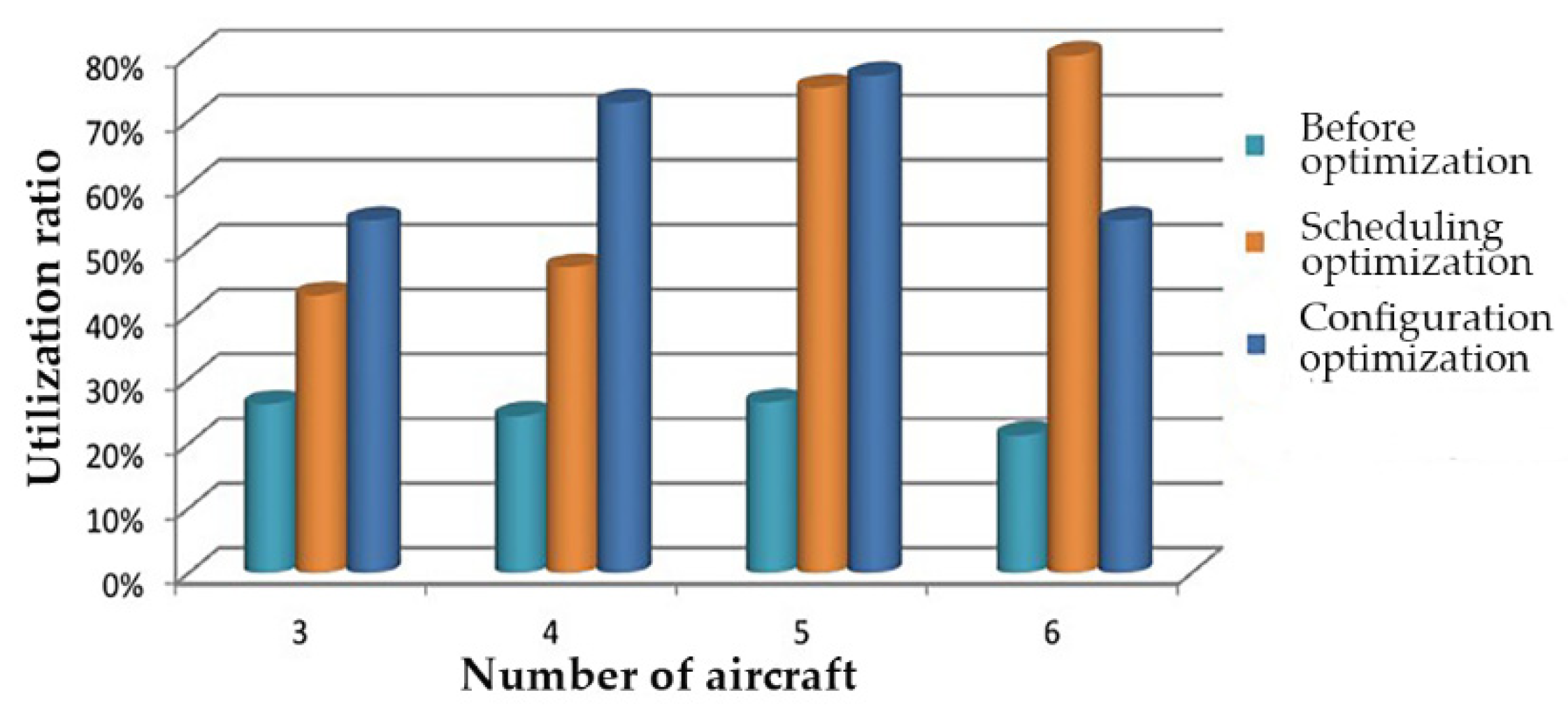
In addition to the general requirement of total guarantee time, the utilization rate of guarantee vehicles is also an important indicator of optimization. The improvement of the utilization rate can reduce the number of guarantee resources, save costs, effectively reduce the idle time of equipment, and lead to a quick completion of the guarantee task. Through the above calculation, the utilization rates of the refueling truck, the oxygenation refilling truck, and the power van before and after the optimization are shown in Figure 7, Figure 8 and Figure 9. It can be seen from Figure 7 that with the increase of the number of support aircraft, the utilization rates of the refueling truck before the optimization are all 100%, which decrease after the optimization, but the average utilization rate reaches more than 70%. On the other hand, Figure 8 shows that with the increase of the number of support aircraft, the average utilization rate of the oxygenation refilling truck before optimization gradually increases, which is basically between 30% and 80%. While the utilization rate of the oxygenation refilling truck after optimization is 0–39% higher than that before optimization, and the average is between 33% and 100%. As seen from Figure 9, with the increase of the number of support aircraft, the fluctuation of the power van before optimization becomes small, which basically ranges from 18% to 26%. The utilization rate of the optimized power van increases gradually, which is higher than that before optimization by 0–59%, i.e., between 18% and 80%.
From the vehicle scheduling optimization results of multi-aircraft support, it can be found that the total time of 3-aircraft support reaches 90 min, exceeding the support time of 4 aircraft; a 4-aircraft power van worked for 10 min; two of the 5-aircraft power vans worked for 10 min, and the utilization rate of the refueling trucks decreased compared with that before optimization, and the total time reached 90 min. Two and three of the six-aircraft power vans worked for 10 min, the utilization rate of the refueling vehicle decreased, and the power vans stood in the way of shortening the time. Therefore, the vehicle configuration is adjusted with the results shown in Table 7.
To further shorten the total working time and improve the guaranteed efficiency, the guarantee vehicles with fewer working hours and long idle time should be appropriately reduced, and the key vehicles affecting the working hours should be appropriately increased. Considering the actual situation of the airport support, after further optimizing the number of support vehicles, the operation scheduling results of the support vehicles with the optimized vehicle configuration are obtained. Figure 10 shows the changes of the population fitness value after vehicle configuration optimization, the guaranteed vehicle utilization rate and the three job completion time statistics are shown in Table 8, and the vehicle job scheduling optimization scheme is shown in Figure 11.
Considering that the single aircraft and the double aircraft are under the protection of a set of support vehicles, through scheduling optimization, the total time can be controlled within 60 min with good optimization results, and the vehicle configuration can no longer be added.
- (1)
- Optimization of vehicle configuration with 3-aircraft support
There is a limit to the further shortening of the guarantee time due to the number of refueling vehicles, and the adjustment measure is to add 1 refueling truck. According to Figure 10a, the population fitness value is stable at 60 min, and the population average value is stable at 75 min. As can be seen from Table 7, after optimization, the utilization rate of the refueling truck is 100%, that of the oxygenation refilling truck is reduced from 81.8% to 75%, and that of the power van is increased from 42.9% to 54.5%. At the same time, the completion time of the three operations after optimization is 60 min, which is 30 min less than that before optimization.
- (2)
- Optimization of vehicle configuration with 4-aircraft support
According to Table 4, the utilization rate of power van 1 is low, the working time is short, and the waiting time is long. The adjustment measure is to reduce 1 power van. It can be seen from Figure 10b that the population fitness value is stable at 60 min, and the population average value is stable at 80 min. As can be seen from Table 7, the utilization rate of the optimized refueling truck and oxygenation refilling truck is 100%, and the utilization rate of the power van is increased to 72.7%. Through vehicle adjustment, the utilization rate of the power van is improved, the support resources are reduced, and the support time is kept at 60 min before and after optimization.
- (3)
- Optimization of vehicle configuration with 5-aircraft support
As can be seen from Table 4, the long working hours of the refueling truck and the oxygenation refilling truck limit the further shortening of the support time, and the long waiting time of the power van 1 causes a waste of resources. The measures are as follows: one more refueling truck and one more oxygenation refilling truck and one less power van. It can be seen from Figure 10c that the population fitness value is stable at 65 min, and the population average value is stable at 90 min. From Table 7, it can be seen that the utilization rate of optimized refueling vehicles is 100%, and the waiting time is 0 min. After optimization, the utilization rates of the oxygenation refilling truck are 66.7% and 75%, respectively, which decrease from a numerical point of view but remain at a high level; with the optimization, the average utilization rate of the power van is increased from 75% to 76.9%, which is slightly improved, but the waste of resources is greatly reduced. Total time of the optimized three tasks is 65 min, which is 25 min shorter than the previous 90 min.
- (4)
- Optimization of vehicle configuration with 6-aircraft support
From Table 5, it can be seen that the working time of the oxygenation refilling truck limits the further shortening of the support time, and the utilization rate of power van 2 is low, resulting in a waste of resources. The measures are as follows: adding one oxygenation refilling truck and reducing one power van. According to Figure 10d, the population fitness value is stable at 60 min, and the population average value is stable at 100 min. Table 8 shows that after optimization, the waiting time of the refueling truck disappears, and the utilization rates all returns to 100%. After optimization, the average utilization rate of the oxygenation refilling truck decreased, but all of them were above 75%. With the optimization, the average utilization rate of the power van is 54.5%, which is lower than that before optimization, but it is still at a high level. In addition, the longest working time of the optimized power van is 30 min, which is still less than 40 min before optimization, and at the same time, the support resources are saved. After the optimization, the total time of the three tasks is 60 min, which is 30 min shorter than the previous 90 min.
Based on the previous vehicle configuration optimization, the total time and vehicle utilization rate of the three guarantees of 3–6 aircraft after optimization are obtained, and the results of the three schemes before optimization, after scheduling optimization, and after vehicle configuration optimization are compared, as shown in Figure 12, Figure 13, Figure 14 and Figure 15.
As seen from Figure 12, Figure 13, Figure 14 and Figure 15, the average time of multi-aircraft support after configuration optimization is further shortened to be 65 min. The utilization rate of refueling vehicles after scheduling optimization decreases with the increase of the number of support aircraft, and the utilization rate remains at 100% after configuration optimization. With the increase of the number of support aircraft, the utilization rate of the oxygenation refilling truck before optimization is increasing, and after scheduling optimization, the utilization rate is greatly improved. Although the utilization rate decreases after configuration optimization, it is still higher than that before optimization. Before the optimization, the utilization rate of the power van was kept at a low level, and after the optimization, the utilization rate was greatly improved. Compared with the utilization rate of the oxygenation refilling truck after the optimization and with the increase of the number of support aircraft, the utilization rate of only 6 aircraft decreased after the optimization, and the other utilization rates were further improved. In general, although the utilization rate of some vehicles after configuration optimization is lower than that after scheduling optimization, it saves more time, so this adjustment is very necessary.
5.3. Operation Scheduling Optimization Scheme of Apron Support Vehicles
The support time of apron support vehicles is the key factor restricting the safety supportability of the apron. In other words, only rapid, safe, and orderly support service can improve aircraft safety supportability. Therefore, through the scheduling optimization and vehicle configuration optimization of the guaranteed vehicles, taking the shortest time as the main optimization objective and referring to the utilization rate of vehicles, the multi-aircraft guaranteed vehicle configuration and scheduling scheme of the airport are optimized with the results of the optimization scheme of the airport apron guaranteed vehicles shown in Table 9.
6. Conclusions
In this paper, the operation scheduling problem of apron support vehicles was studied, and a new method for the improvement of the airport’s support capability and the efficiency of aircraft re-deployment was proposed. By using the empirical method, a multi-machine, multi-guaranteed vehicle, and multi-operation process apron support vehicle scheduling model was established, and a multi-layer coding genetic algorithm was designed to solve the operation scheduling problem of the apron support vehicle. Combined with the actual aircraft support of an airport, the accuracy of the model was verified. The algorithm converges after 50 iterations, thereby confirming the feasibility of the algorithm.
Compared with the traditional support method, the proposed method can be used to greatly improve the utilization rate of the support vehicle while reducing the equipment support time. Among them, the time to protect 4 aircraft and 6 aircraft was significantly shortened by 40 min, while the time to protect 2 aircraft, 3 aircraft, and 5 aircraft was shortened by 25 min. In addition, with the increase of the number of support aircraft, the utilization rate of the oxygenation refilling truck and power van has been greatly improved. Although the utilization rate of the refueling truck has decreased, the utilization rate is still above 70%.
Considering that the number of support vehicles limits the further shortening of the support time and the phenomenon that the utilization rate of power van is still low after optimization, the number of support vehicles was optimized twice. Within 65 min, the average utilization rates of refueling vehicles, oxygen-charging vehicles, and power vans are 100%, 83%, and 65%, respectively, reaching a high level, which further saves time and improves resource utilization.
At present, there are still gaps between the research model and the actual situation. In the next step, we will further study the vehicle scheduling operation under limited guarantee vehicle transportation resources, conduct modeling analysis under the condition that the guarantee time of the same process of different aircraft is not equal, and determine the quantity configuration and scheduling operation of the guarantee vehicle.
Author Contributions
Conceptualization, J.Z.; data curation, J.Z.; formal analysis, X.C.; Investigation, Y.W.; methodology, X.C. and Z.B.; software, J.Z.; supervision, Y.W.; validation, Q.Y.; visualization, Z.B.; writing—original draft, J.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Schmidt, M. A review of aircraft turnaround operations and simulations. Prog. Aerosp. Sci. 2017, 92, 25–38. [Google Scholar] [CrossRef]
- Tabares, D.A.; Mora-Camino, F.; Drouin, A. A multi-time scale management structure for airport ground handling automation. J. Air Transp. Manag. 2021, 90, 101959. [Google Scholar] [CrossRef]
- Alomar, I.; Tolujevs, J. Optimization of ground vehicles movement on the aerodrome. Transp. Res. Procedia 2017, 24, 58–64. [Google Scholar] [CrossRef]
- Gok, Y.S.; Padron, S.; Tomasella, M.; Guimarans, D.; Ozturk, C. Constraint-based robust planning and scheduling of airport apron operations through simheuristics. Ann. Oper. Res. 2022, 1–36. [Google Scholar] [CrossRef]
- Andreatta, G.; Capanna, L.; De Giovanni, L.; Monaci, M.; Righi, L. Efficiency and Robustness in a Support Platform for Intelligent Airport Ground Handling. J. Intell. Transport. Syst. 2014, 18, 121–130. [Google Scholar] [CrossRef]
- Padrón Astorga, S. A Multi-Objective Optimization Approach to the Ground Handling Scheduling Problem; Universitat Autònoma de Barcelona: Bellaterra, Spain, 2014. [Google Scholar]
- Perez-Rodriguez, R.; Hernandez-Aguirre, A. A hybrid estimation of distribution algorithm for the vehicle routing problem with time windows. Comput. Ind. Eng. 2019, 130, 75–96. [Google Scholar] [CrossRef]
- Du, Y.Q.; Zhang, Q.; Chen, Q.S. ACO-IH: An Improved Ant Colony Optimization Algorithm for Airport Ground Service Scheduling. In Proceedings of the 2008 IEEE International Conference on Industrial Technology, Chengdu, China, 21–24 April 2008; IEEE: Piscataway, NJ, USA; Volumes 1–5, pp. 1926–1931. [Google Scholar]
- Schyns, M. An ant colony system for responsive dynamic vehicle routing. Eur. J. Oper. Res. 2015, 245, 704–718. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.H.; Wu, J.J.; Tang, J.; Wang, W.P.; Wang, X.F. Scheduling optimisation of multi-type special vehicles in an airport. Transp. B 2022, 10, 954–970. [Google Scholar] [CrossRef]
- Kuhn, K.; Loth, S. Airport service vehicle scheduling. In Proceedings of the ATM Seminar 2009, Napa, CA, USA, 29 June–2 July 2009. [Google Scholar]
- Wang, Z.; Li, Y.; Hei, X.; Meng, H. Research on Airport Refueling Vehicle Scheduling Problem Based on Greedy Algorithm. In Intelligent Computing Theories and Application; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Qin, W.J.; Shi, Z.C.; Li, W.H.; Li, K.W.; Zhang, T.; Wang, R. Multiobjective routing optimization of mobile charging vehicles for UAV power supply guarantees. Comput. Ind. Eng. 2021, 162, 107714. [Google Scholar] [CrossRef]
- Evler, J.; Asadi, E.; Preis, H.; Fricke, H. Airline ground operations: Schedule recovery optimization approach with constrained resources. Transport. Res. C-Emer. 2021, 128, 103129. [Google Scholar] [CrossRef]
- Padron, S.; Guimarans, D.; Ramos, J.J.; Fitouri-Trabelsi, S. A bi-objective approach for scheduling ground-handling vehicles in airports. Comput. Oper. Res. 2016, 71, 34–53. [Google Scholar] [CrossRef] [Green Version]
- Tang, F.; Liu, S. Research of Aircraft Ground Service Scheduling Problems. In Proceedings of the 2016 Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016. [Google Scholar]
- Li, Q.; Bi, J.; Li, Z. Research on Ferry Vehicle Scheduling Problem within Airport Operations. In Proceedings of the 2017 10th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 9–10 December 2017. [Google Scholar]
- Mota, M.M.; Boosten, G.; De Bock, N.; Jimenez, E.; de Sousa, J.P. Simulation-based turnaround evaluation for Lelystad Airport. J. Air Transp. Manag. 2017, 64, 21–32. [Google Scholar] [CrossRef]
- Li, K.; Huang, Z.; Zhu, Q. Research on Modeling and Simulation of Support ability of Aerial Air-Conditioning Vehicle. Comput. Simul. 2017, 34, 443–449. [Google Scholar]
- Sheng, J.; Wang, Q.; Hou, L.; Zhu, H. Simulation optimization for equipment support plan of aviation fourth station based on orthogonal design method. Logist. Technol. 2013, 32, 296–299. [Google Scholar]
- Wang, S.X.; Che, Y.X.; Zhao, H.J.; Lim, A. Accurate Tracking, Collision Detection, and Optimal Scheduling of Airport Ground Support Equipment. IEEE Internet Things J. 2021, 8, 572–584. [Google Scholar] [CrossRef]
- Zhang, J.; Gao, T.; Chen, W.; Chen, Y.; Li, Z. Study on optimization allocation methods of equipment support personnel. Fire Control Command Control 2016, 41, 192–196. [Google Scholar]
- Wang, W.; Zhu, H.; Sun, L.; Wu, S.; Jia, X. Optimization configuration of equipment in maintenance. Sci. Technol. Eng. 2009, 9, 6601–6602. [Google Scholar]
- Liu, Y.; Zhang, J.; Ding, C.; Bi, J. Modeling and heuristic algorithm of ground ferry vehicle scheduling in large airports. In Proceedings of the 19th COTA International Conference of Transportation, Nanjing, China, 6–8 July 2019; pp. 159–170. [Google Scholar]
- Heng, H.; Yan, X.; Wang, F.; Li, H. Research on dynamic scheduling of airport fuel filling vehicles. Comput. Eng. Des. 2017, 38, 1382–1388. [Google Scholar]
- Han, X.; Zhao, P.X.; Meng, Q.C.; Yin, S.N.; Wan, D. Optimal scheduling of airport ferry vehicles based on capacity network. Ann. Oper. Res. 2020, 295, 163–182. [Google Scholar] [CrossRef]
- Widemann, M.; Farschtschi, Y.; Wittmann, J.; Möller, D.P. Work flow management of the ground handling at the airport through modular system optimizing. In Proceedings of the Eurosim 2010, Prague, Czech Republic, 6–10 September 2010. [Google Scholar]
- Zhao, P.X.; Gao, W.Q.; Han, X.; Luo, W.H. Bi-Objective Collaborative Scheduling Optimization of Airport Ferry Vehicle and Tractor. Int. J. Simul. Model. 2019, 18, 355–365. [Google Scholar] [CrossRef]
- Zhao, G.H.; Du, Y.P. Research on Airport Apron Service Based on Particle Swarm Optimization. In Proceedings of the 2013 International Conference on Management Science and Engineering 20th Annual Conference, Harbin, China, 17–19 July 2013; Hua, L., Ed.; IEEE: Piscataway, NJ, USA, 2013; pp. 484–488. [Google Scholar]
- Alcaraz, J.; Maroto, C.; Ruiz, R. Solving the multi-mode resource-constrained project scheduling problem with genetic algorithms. J. Oper. Res. Soc. 2003, 54, 614–626. [Google Scholar] [CrossRef]
- Tareghian, H.R.; Farahi, M.H.; Moarab, M. Solving resource constrained scheduling problem by genetic algorithm. Shahid Chamran Univ. J. Sci. 2007, 16, 24–34. [Google Scholar]
- Nonobe, K.; Ibaraki, T. Formulation and Tabu Search Algorithm for the Resource Constrained Project Scheduling Problem. In Essays and Surveys in Metaheuristics; Springer: Boston, MA, USA, 2002; pp. 557–588. [Google Scholar]
- Merkle, D.; Middendorf, M.; Schmeck, H. Ant colony optimization for resource-constrained project scheduling. IEEE Trans. Evolut. Comput. 2002, 6, 333–346. [Google Scholar] [CrossRef] [Green Version]
- Fleszar, K.; Hindi, K.S. Solving the resource-constrained project scheduling problem by a variable neighbourhood search. Eur. J. Oper. Res. 2004, 155, 402–413. [Google Scholar] [CrossRef]
- Chen, R.; Yang, B.; Li, S.; Wang, S. A self-learning genetic algorithm based on reinforcement learning for flexible job-shop scheduling problem. Comput. Ind. Eng. 2020, 149, 106778. [Google Scholar] [CrossRef]
- Kacem, I. Genetic Algorithm for the Flexible Job-Shop Scheduling Problem. In Proceedings of the SMC’03 IEEE International Conference on Systems, Man and Cybernetics, Conference Theme—System Security and Assurance (Cat. No.03CH37483). Washington, DC, USA, 8 October 2003. [Google Scholar]
- Chiang, T.; Lin, H. A simple and effective evolutionary algorithm for multiobjective flexible job shop scheduling. Int. J. Prod. Econ. 2013, 141, 87–98. [Google Scholar] [CrossRef]
- Brucker, P.; Drexl, A.; Möhring, R.; Neumann, K.; Pesch, E. Resource-constrained project scheduling: Notation, classification, models, and methods. Eur. J. Oper. Res. 1999, 112, 3–41. [Google Scholar] [CrossRef]
- Xu, L.; Cao, Y.; Huang, B. Research on Multi-Distribution Center Vehicle Routing Optimization Method Based on Improved Multi-Layer Coding Genetic Algorithm. Open J. Transp. Technol. 2019, 8, 222–232. [Google Scholar]
Figure 1.
Apron support vehicle operation process.

Figure 2.
Flowchart of scheduling algorithm for apron support vehicles.

Figure 3.
Operation location of each support vehicles.

Figure 4.
Change of population fitness value. (a) 3 aircraft, (b) 4 aircraft, (c) 5 aircraft, (d) 6 aircraft.
Figure 4.
Change of population fitness value. (a) 3 aircraft, (b) 4 aircraft, (c) 5 aircraft, (d) 6 aircraft.


Figure 5.
Change of population fitness value. (a) 3 aircraft, (b) 4 aircraft, (c) 5 aircraft, (d) 6 aircraft.
Figure 5.
Change of population fitness value. (a) 3 aircraft, (b) 4 aircraft, (c) 5 aircraft, (d) 6 aircraft.

Figure 6.
Multi-aircraft support three times before and after scheduling optimization.

Figure 7.
The relationship between the average utilization of refueling trucks and the number of aircraft before and after optimization.
Figure 7.
The relationship between the average utilization of refueling trucks and the number of aircraft before and after optimization.

Figure 8.
The relationship between the average utilization rate of oxygenation refilling trucks and the number of support aircraft before and after optimization.
Figure 8.
The relationship between the average utilization rate of oxygenation refilling trucks and the number of support aircraft before and after optimization.

Figure 9.
The relationship between the average utilization rate of power vans and the number of support aircraft before and after optimization.
Figure 9.
The relationship between the average utilization rate of power vans and the number of support aircraft before and after optimization.

Figure 10.
Change of population fitness value. (a) 3 aircraft, (b) 4 aircraft, (c) 5 aircraft, (d) 6 aircraft.
Figure 10.
Change of population fitness value. (a) 3 aircraft, (b) 4 aircraft, (c) 5 aircraft, (d) 6 aircraft.


Figure 11.
Change of population fitness value. (a) 3 aircraft, (b) 4 aircraft, (c) 5 aircraft, (d) 6 aircraft.
Figure 11.
Change of population fitness value. (a) 3 aircraft, (b) 4 aircraft, (c) 5 aircraft, (d) 6 aircraft.


Figure 12.
Multi-aircraft support three times.

Figure 13.
The relationship between the average utilization of refueling trucks and the number of aircraft.
Figure 13.
The relationship between the average utilization of refueling trucks and the number of aircraft.

Figure 14.
The relationship between the average utilization rate of oxygenation refilling trucks and the number of support aircraft.
Figure 14.
The relationship between the average utilization rate of oxygenation refilling trucks and the number of support aircraft.

Figure 15.
The relationship between the average utilization rate of power vans and the number of support aircraft.
Figure 15.
The relationship between the average utilization rate of power vans and the number of support aircraft.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
The main content of each major of the crew.
| Specialty | Main Work |
|---|---|
| Mechanical specialty | Responsible for aircraft structure, engine, operating system, and so on. Complete the filling of oil, hydraulic oil and lubricating oil, nitrogen, etc. with the assistance of the refueling truck, air conditioner, and other supporting vehicles. |
| Avionics specialty | Responsible for the aircraft control system, fire control system, communication and navigation equipment, etc. Complete the inspection and collation with the assistance of power vehicles. |
| Ordnance specialty | Responsible for aircraft’s seats, pylons, aircraft guns, etc. Complete the loading and unloading of weapons with the assistance of the loader of air-launched weapons. |
| Ad hoc specialty | Responsible for cockpit electronics, instruments, special equipment, and so on with the assistance of power vans and oxygen filling vehicles. |
Table 2.
Notation and terminology.
| Notation | Definition |
|---|---|
| Om | m processors |
| Cmax | the time objective function |
| Cmax = max{Cj} | equal to the end time of the last completed task |
| P | job time matrix, representing the time when j task completes the corresponding job on the i processor. |
| Tmin | the minimum time for ground support operations |
| Mij | the j support operation of the i aircraft |
| Pij | the support vehicle for the support operation Mij |
| Tij | the operation time of the guaranteed operation Mij |
| Sij | the start operation time of the guarantee operation Mij |
| Fij | the end operation time of the guarantee operation Mij |
| MaxF | the longest guarantee operation end time |
| Ω | the set of feasible solutions |
| P | the parent solution which is selected from the population |
| C | the child solution after crossover |
| M | the population which has several initial solutions |
| pi(i) | the probability which the chromosome is selected |
| Re | refueling truck |
| Ox | oxygen refilling truck |
| Po | power van |
| To | operation time, min |
| Tw | waiting time, min |
| Tt | total time, min |
Table 3.
Average operating time of each support vehicles.
| Vehicle | Tractor | Refueling Truck | Oxygenation Refilling Truck | Power Van | Loader of Air-Launched Weapon |
|---|---|---|---|---|---|
| Time/min | 10 | 30 | 15 | 10 | 2 |
Table 4.
Number of support vehicles for a certain type of aircraft.
| Vehicle | 1 | 2 | 3 | 4 | 5 | 6 | |
|---|---|---|---|---|---|---|---|
| Aircraft | |||||||
| Re | 1 | 1 | 1 | 2 | 2 | 3 | |
| Ox | 1 | 1 | 1 | 1 | 1 | 1 | |
| Po | 1 | 1 | 1 | 2 | 2 | 3 | |
Table 5.
Statistics of support vehicle utilization and completion time of three operations before and after scheduling optimization.
Table 5.
Statistics of support vehicle utilization and completion time of three operations before and after scheduling optimization.
| Aircraft | Before | After | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Vehicle | To | Tw | Utilization Ratio | Tt | Vehicle | To | Tw | Utilization Ratio | Tt | |
| 3 | Re | 90 | 0 | 100% | 115 | Re | 90 | 0 | 100% | 90 |
| Ox | 45 | 60 | 42.9% | Ox | 45 | 10 | 81.8% | |||
| Po | 30 | 85 | 26.1% | Po | 30 | 40 | 42.9% | |||
| 4 | Re1 | 60 | 0 | 100% | 100 | Re1 | 60 | 0 | 100% | 60 |
| Re2 | 60 | 0 | 100% | Re2 | 60 | 0 | 100% | |||
| Ox | 60 | 30 | 66.7% | Ox | 60 | 0 | 100% | |||
| Po1 | 20 | 50 | 28.6% | Po1 | 10 | 15 | 40% | |||
| Po2 | 20 | 80 | 20% | Po2 | 30 | 25 | 54.5% | |||
| 5 | Re1 | 90 | 0 | 100% | 115 | Re1 | 90 | 0 | 100% | 90 |
| Re2 | 60 | 0 | 100% | Re2 | 60 | 30 | 66.7% | |||
| Ox | 75 | 30 | 71.4% | Ox | 75 | 10 | 88.23% | |||
| Po1 | 30 | 55 | 35.3% | Po1 | 40 | 40 | 50% | |||
| Po2 | 20 | 95 | 17.4% | Po2 | 10 | 0 | 100% | |||
| 6 | Re1 | 60 | 0 | 100% | 130 | Re1 | 60 | 30 | 66.7% | 90 |
| Re2 | 60 | 0 | 100% | Re2 | 60 | 30 | 66.7% | |||
| Re3 | 60 | 0 | 100% | Re3 | 60 | 10 | 85.7% | |||
| Ox | 90 | 30 | 75% | Ox | 90 | 0 | 100% | |||
| Po1 | 20 | 50 | 28.6% | Po1 | 40 | 0 | 100% | |||
| Po2 | 20 | 80 | 20% | Po2 | 10 | 15 | 40% | |||
| Po3 | 20 | 110 | 15.4% | Po3 | 10 | 0 | 100% | |||
Table 6.
Statistics of support vehicle utilization and completion time of three operations before and after scheduling optimization.
Table 6.
Statistics of support vehicle utilization and completion time of three operations before and after scheduling optimization.
| Vehicle | Single-Aircraft before | Single-Aircraft after | Two-Aircraft before | Two-Aircraft after | ||||
|---|---|---|---|---|---|---|---|---|
| Utilization Ratio | Tt | Utilization Ratio | Tt | Utilization Ratio | Tt | Utilization Ratio | Tt | |
| Re | 100% | 55 | 100% | 55 | 100% | 85 | 100% | 60 |
| Ox | 33.3% | 33.3% | 40% | 66.7% | ||||
| Po | 18.2% | 18.2% | 23.5% | 36.4% | ||||
Table 7.
Number of support vehicles for a certain type of aircraft.
| Aircraft | 3 | 4 | 5 | 6 | |
|---|---|---|---|---|---|
| Vehicle | |||||
| Re | 2 | 2 | 3 | 3 | |
| Ox | 1 | 1 | 2 | 2 | |
| Po | 1 | 1 | 1 | 2 | |
Table 8.
Support vehicles utilization and completion time of three operations.
| Aircraft | Vehicle | To | Tw | Utilization Ratio | Tt |
|---|---|---|---|---|---|
| 3 | Re1 | 30 | 0 | 100% | 60 |
| Re2 | 60 | 0 | 100% | ||
| Ox | 45 | 15 | 75% | ||
| Po | 30 | 25 | 54.5% | ||
| 4 | Re1 | 60 | 0 | 100% | 60 |
| Re2 | 60 | 0 | 100% | ||
| Ox | 60 | 0 | 100% | ||
| Po | 40 | 15 | 72.7% | ||
| 5 | Re1 | 30 | 0 | 100% | 65 |
| Re2 | 60 | 0 | 100% | ||
| Re3 | 60 | 0 | 100% | ||
| Ox1 | 30 | 15 | 66.7% | ||
| Ox2 | 45 | 15 | 75% | ||
| Po | 50 | 15 | 76.9% | ||
| 6 | Re1 | 60 | 0 | 100% | 60 |
| Re2 | 60 | 0 | 100% | ||
| Re3 | 60 | 0 | 100% | ||
| Ox1 | 45 | 15 | 75% | ||
| Ox2 | 45 | 0 | 100% | ||
| Po1 | 30 | 25 | 54.5% | ||
| Po2 | 30 | 25 | 54.5% |
Table 9.
Optimization scheme of airport apron support vehicles.
| Aircraft | Vehicle Configuration (Re:Ox:Po) | Vehicle Scheduling | Least Time/Min |
|---|---|---|---|
| 1 | 1:1:1 | Re: A1 Ox: A1 Po: A1 | 55 |
| 2 | 1:1:1 | Re: A1 → A2 Ox: A2 → A1 Po: A2 → A1 | 60 |
| 3 | 2:1:1 | Re1: A2 Re2: A3 → A1 Ox: A1 → A3 → A2 Po: A1 → A2 → A3 | 60 |
| 4 | 2:1:1 | Re1: A3 → A2 Re2: A4 → A1 Ox: A2 → A1 → A3 → A4 Po: A1 → A2 → A4 → A3 | 60 |
| 5 | 3:2:1 | Re1: A5 Re2: A2 → A1 Re3: A4 → A3 Ox1: A2 → A1 → A3 → A4 Ox2: A2 → A1 → A3 → A4 Po: A1 → A3 → A2 → A5 → A4 | 65 |
| 6 | 3:2:2 | Re1: A5 → A2 Re2: A4 → A3 Re3: A6 → A1 Ox1: A2 → A4 → A6 Ox2: A3 → A1 → A5 Po1: A1 → A3 → A5 Po2: A2 → A6 → A4 | 60 |
A = aircraft.
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Zhang, J.; Chong, X.; Wei, Y.; Bi, Z.; Yu, Q. Optimization of Apron Support Vehicle Operation Scheduling Based on Multi-Layer Coding Genetic Algorithm. Appl. Sci. 2022, 12, 5279. https://0-doi-org.brum.beds.ac.uk/10.3390/app12105279
AMA Style
Zhang J, Chong X, Wei Y, Bi Z, Yu Q. Optimization of Apron Support Vehicle Operation Scheduling Based on Multi-Layer Coding Genetic Algorithm. Applied Sciences. 2022; 12(10):5279. https://0-doi-org.brum.beds.ac.uk/10.3390/app12105279
Chicago/Turabian StyleZhang, Jichao, Xiaolei Chong, Yazhi Wei, Zheng Bi, and Qingkun Yu. 2022. "Optimization of Apron Support Vehicle Operation Scheduling Based on Multi-Layer Coding Genetic Algorithm" Applied Sciences 12, no. 10: 5279. https://0-doi-org.brum.beds.ac.uk/10.3390/app12105279
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.