
Cooperative Multi-UAV Collision Avoidance Based on Distributed Dynamic Optimization and Causal Analysis

Abstract
:1. Introduction
- This paper presents an innovative strategy, distributed dynamic optimization approach (DDOA), to provide alternative trajectories for each UAV, by adding some essential constraints (i.e., performance, cost and distance) to make the problem treatable while the feasible trajectory generation for multi-UAV is a non-deterministic polynomial (NP) problem.
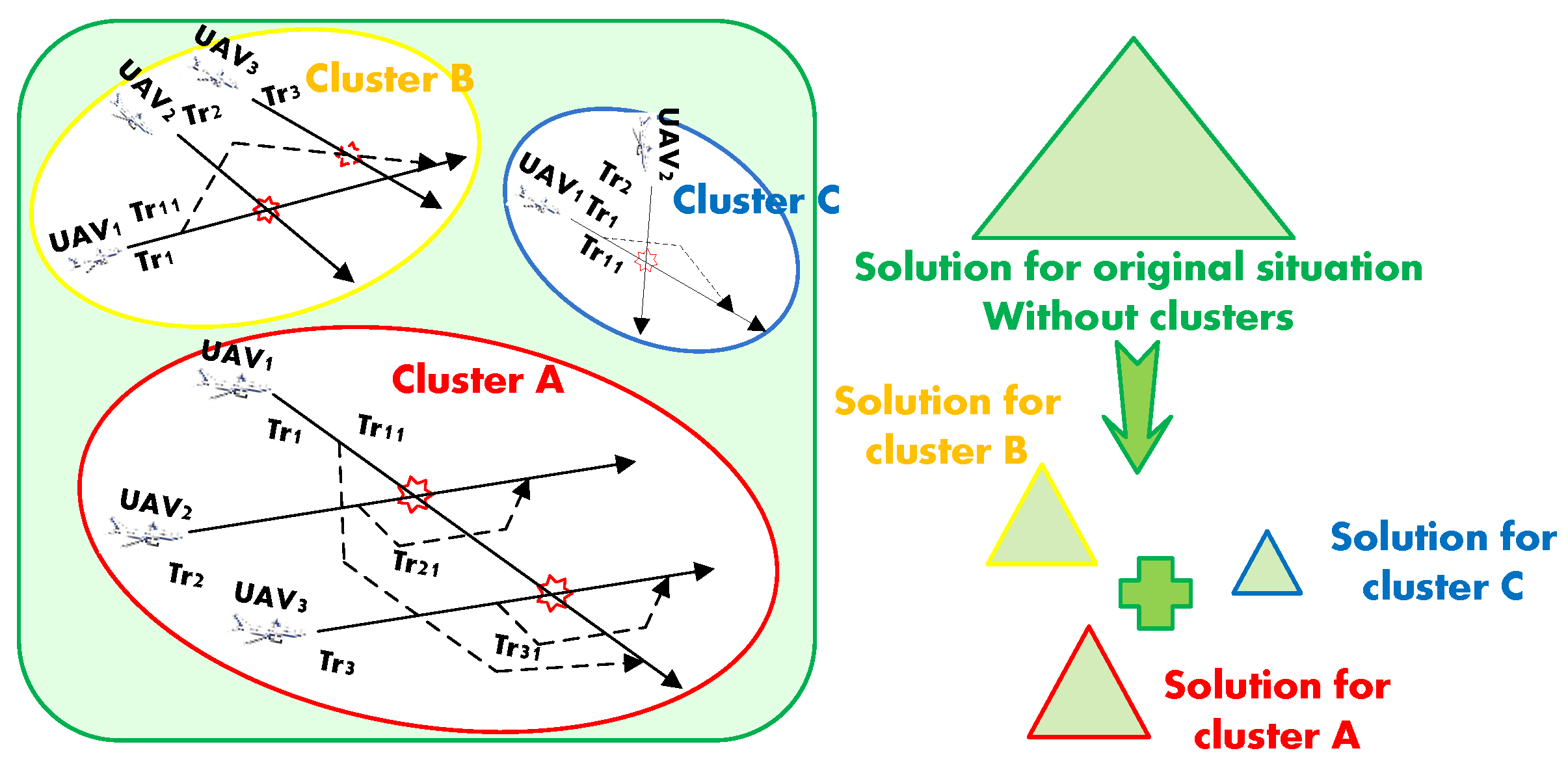
- The novel causal analysis is developed to choose a preferred resolution trajectory, performing an analysis of scenario state space in order to explore the dynamic evolution and then determine all reachable states. By decomposing the complex scenario into several common clusters, the solution space is greatly reduced.
- Quantitative measurement experiments are carried out to validate the feasibility and scalability of the CA system for the free flight of multi-UAV. In addition, the average computation time does not grow exponentially as the airspace density increases.
2. The Proposed CA System Architecture
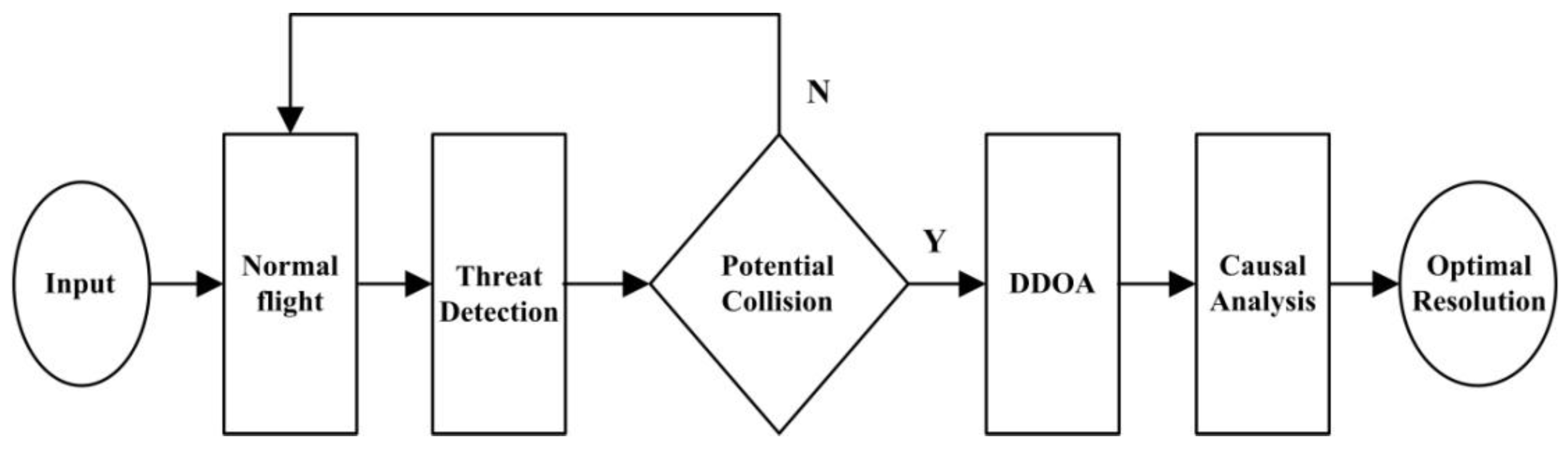
- The CD module that analyzes the flight information depending on 4D trajectory has two different roles: generating the intuitionistic representation of threats and informing the CR module.
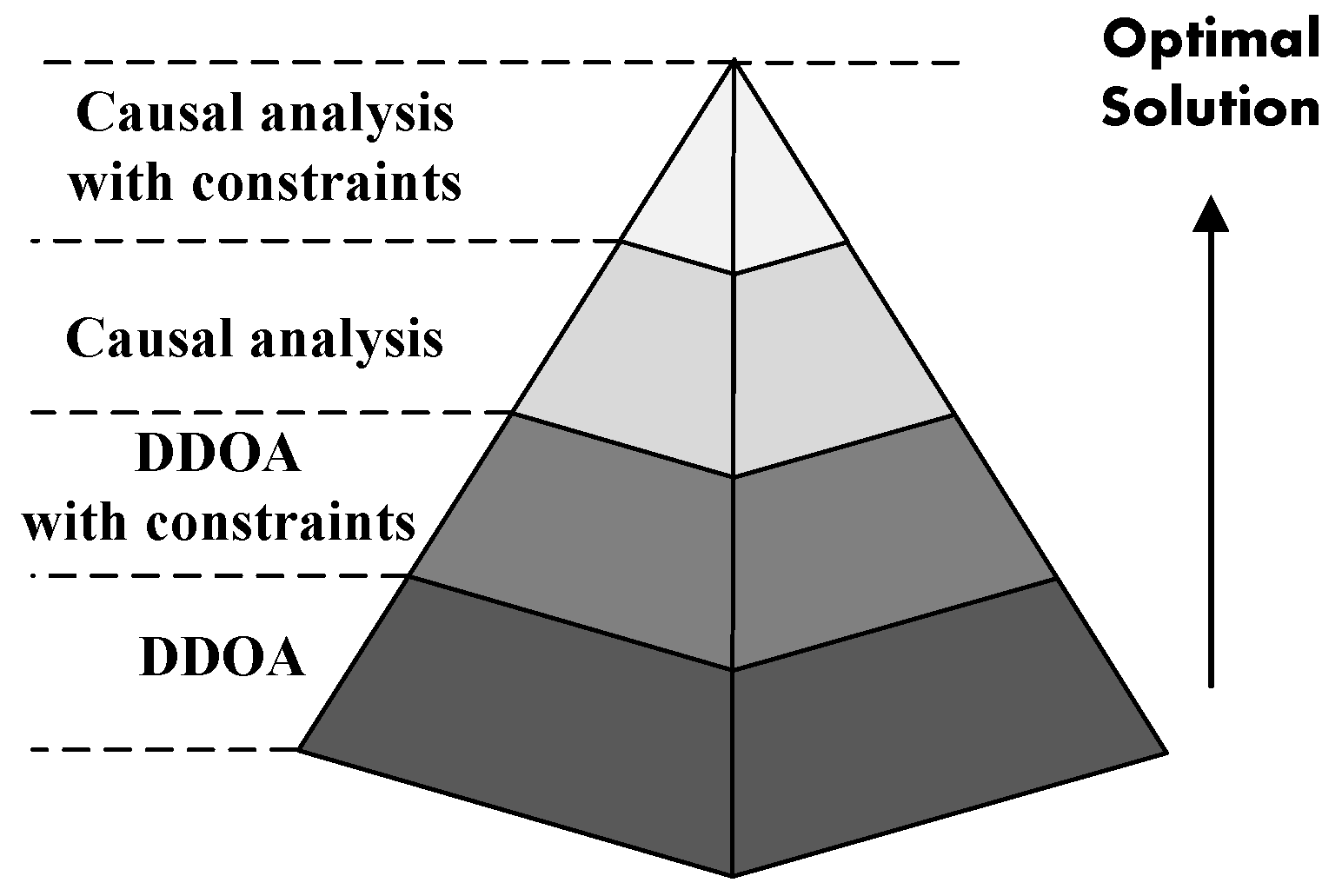
- The CR module integrates CD and resolves the detected conflicts in two stages: DDOA aims to avoid collisions by generating alternative trajectories for each UAV with a local optimization scope; causal analysis focuses on exploring the emergent dynamics between the alternative trajectories generated by DDOA and the rest involved trajectories. Based on the detected threats, the CR should be informed with the geographical coordinates where the collision would occur, the time when the collision would occur, and the involved UAVs. Though CR is a combinatorial problem in exponential growth with the increasing number of UAVs, in our research several strategies such as setting constraints are needed to narrow the solution space progressively to get the final optimal solution. Figure 2 conceptually illustrates the solution procedure. The DDOA generates several locally-optimal CA trajectories considering different constraints, e.g., the two UAVs should meet the performance requirements, satisfy the state equation, and keep a safe distance, etc. This causal analysis allows taking into consideration all the possible solutions that ensure the completeness of the solution space, and then reduces the space once again based on some specific constraints (e.g., the least cost).
3. Core Algorithm Analysis
3.1. Representation of 4D Trajectory and Conflict Detection
3.2. Conflict Resolution Algorithm
3.2.1. Distributed Dynamic Optimization Approach
3.2.2. Causal Analysis
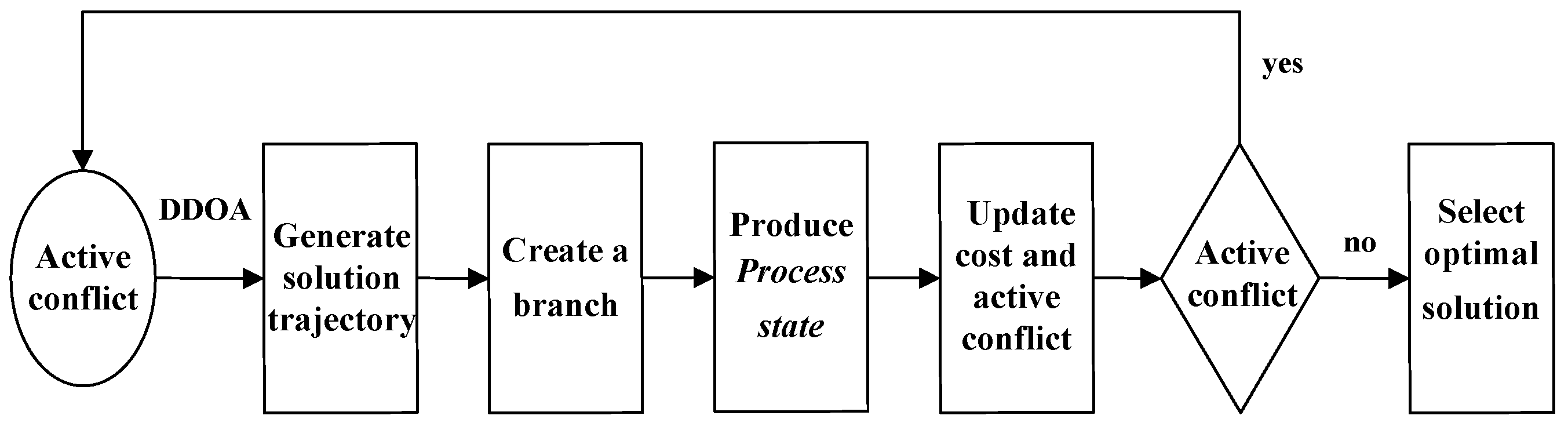
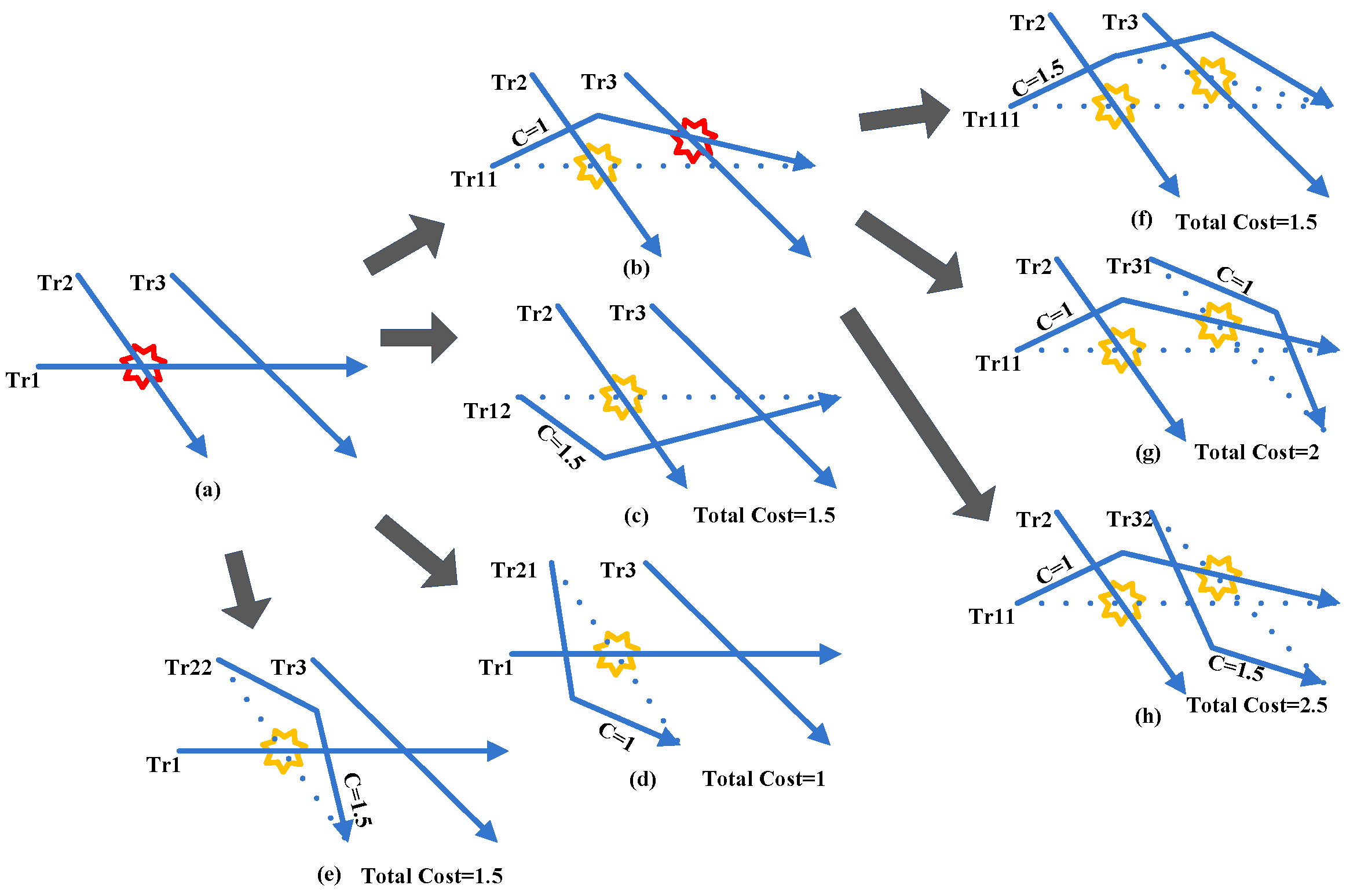
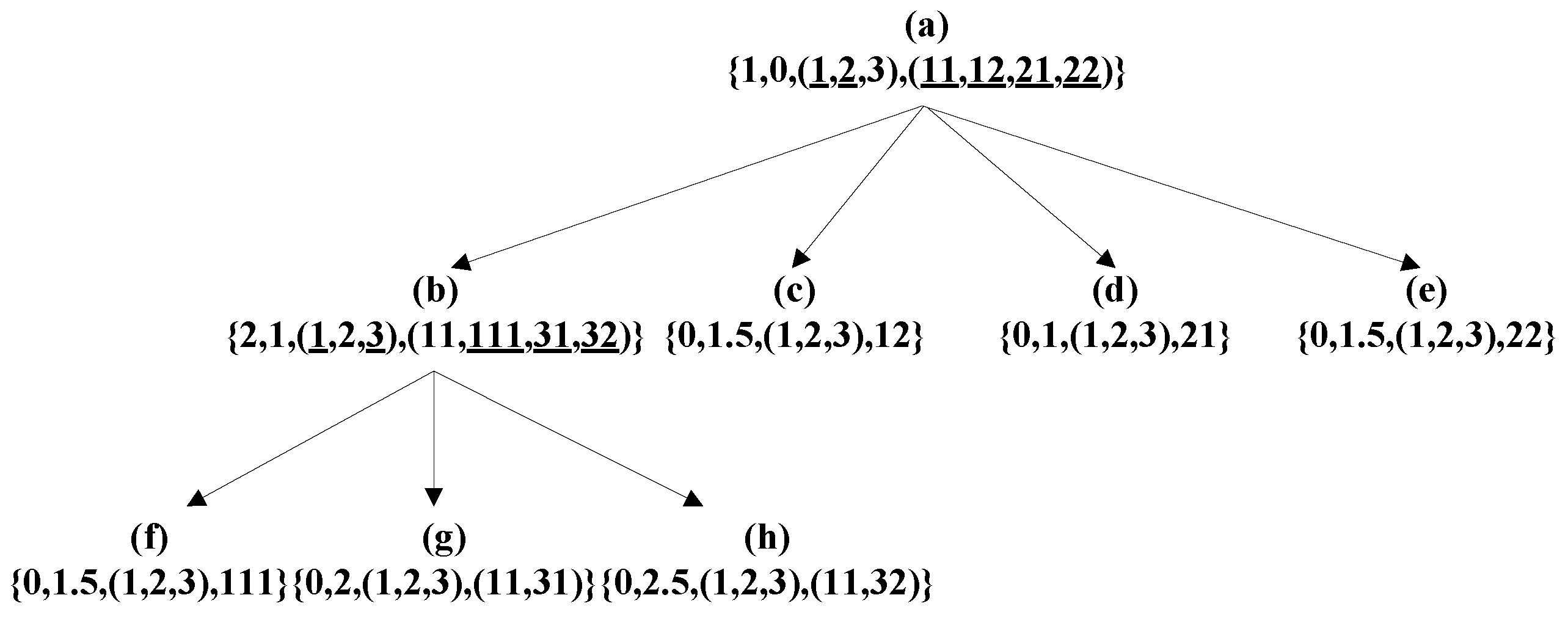
- Conflict: indicates the threat that will be resolved (conflict 2 is active in state a).
- Accumulated cost: Cost summation for the respective resolution trajectories (cost = 1 in state a).
- Active UAVs: is a processed tuple and represents all the UAVs in this scenario, among them the active one would be underlined (UAV1 and UAV3 are active to have conflict 2 in state a).
- Active resolution trajectories: used to store solution trajectories and the active resolution trajectories are represented with underlines to resolve the active collision (111, 31 or 32 can be used to resolve conflict 2 in state a). Here the number is composed with the aircraft identification i and amending strategy descend/climb (1/2).
4. Simulation and Results
4.1. A Case Scenario
- (1)
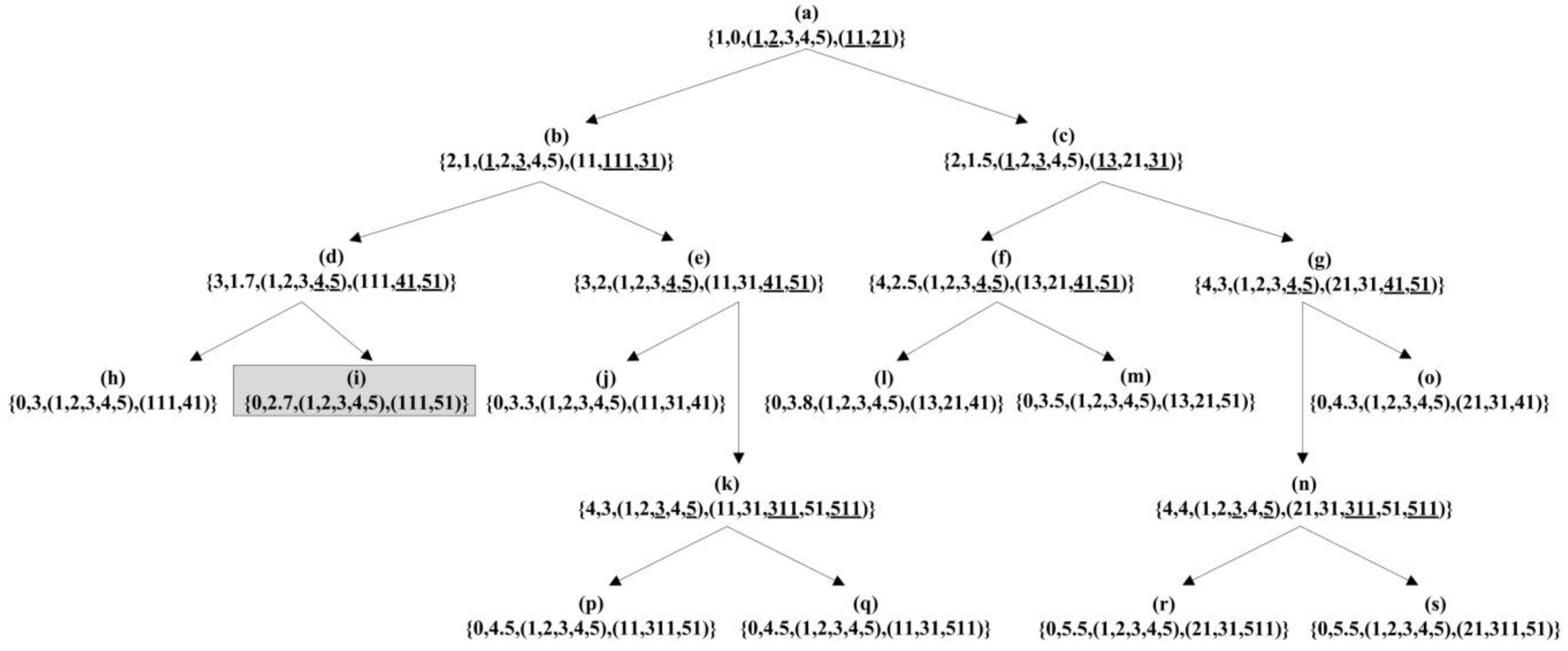
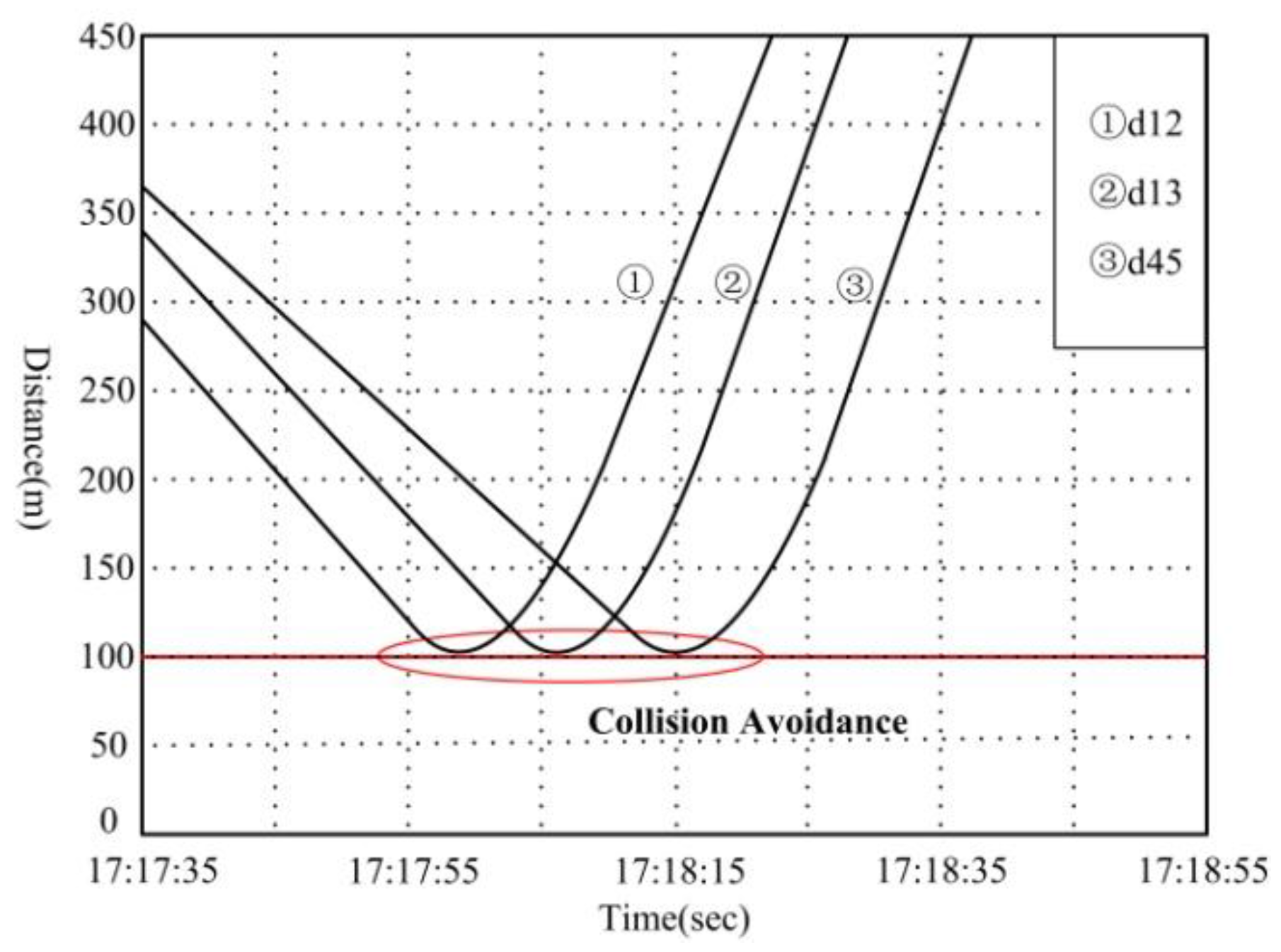
- It is a fairly complex scenario with multiple UAVs. Indeed, among the first three trajectories, Tr1 imposes sequent threats to both Tr2 and Tr3; moreover, an encounter emerges between Tr4 and Tr5, which further increases the complexity of the scenario.
- (2)
- It involves the interrelationship (also called domino effect) between neighboring threats. For instance, a new secondary threat between UAV3 and UAV5 may emerge in the process of resolving their respective previous threat.
- (3)
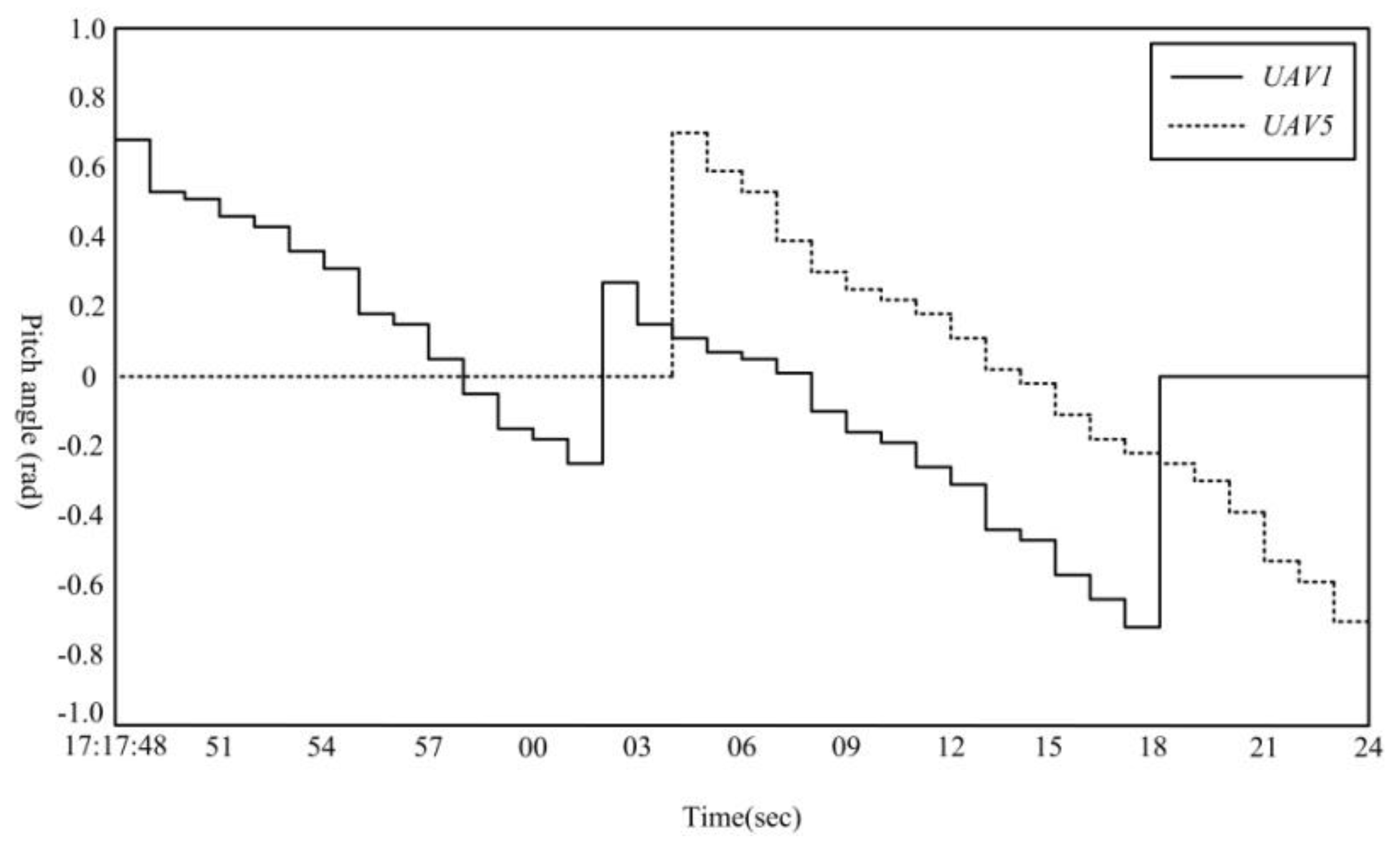
- It resolves successive threats via a compositive CA trajectory, i.e., UAV1 is detected to encounter UAV2 and UAV3 separately in a short continuous time period and the two successive conflicts can be considered overall rather than one by one.
4.2. Further Investigation
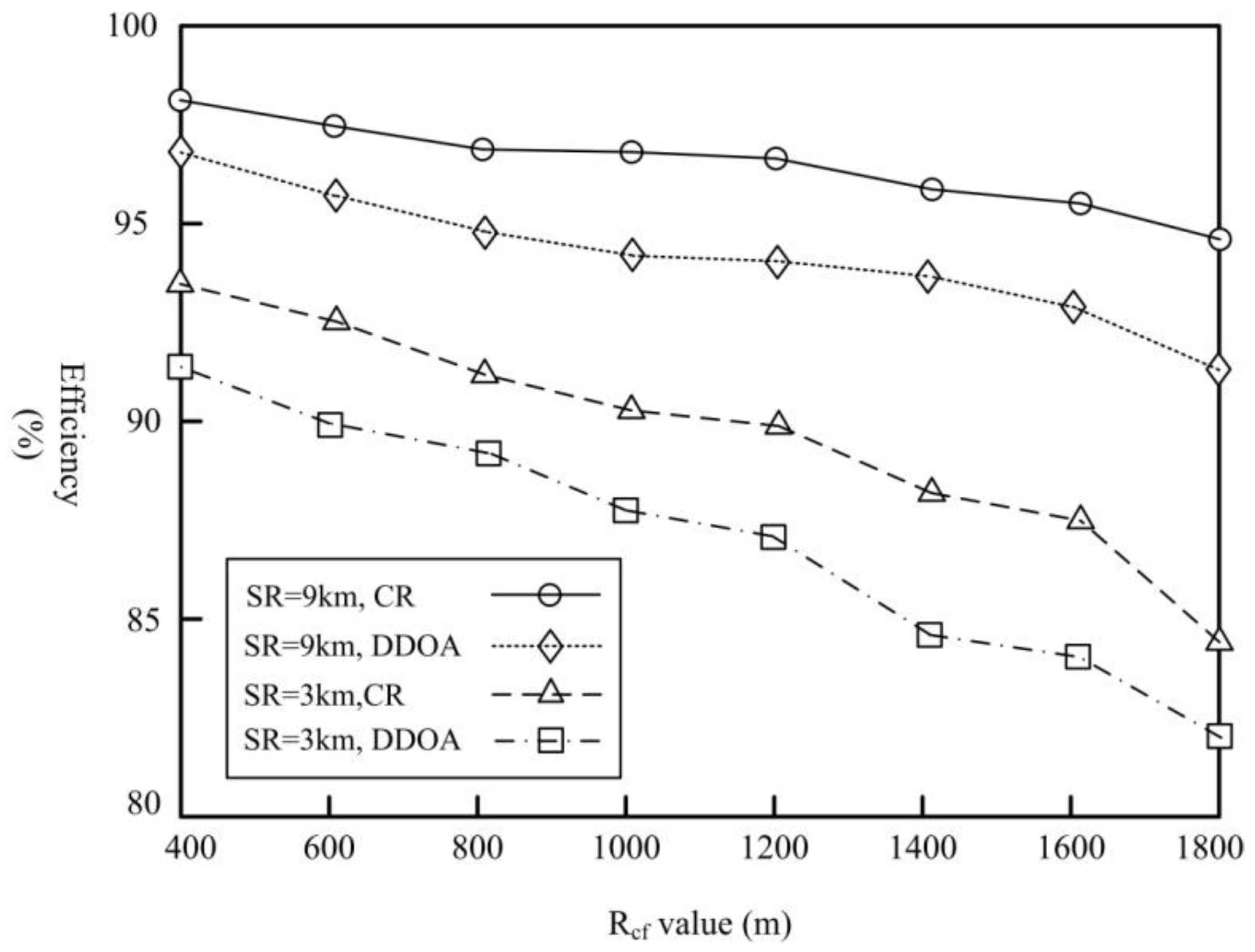
- The efficiency is decreasing as the Rcf value increases, because extensive conflict volume leads to more threats that would be detected by the CD algorithm, thus more waypoints have to be amended to avoid potential collisions resulting in the higher realistic flight time.
- Compared to SR = 9 km, the efficiency is lower when SR is equal to three kilometers with the same Rcf, because the restricting sensor range may ignore the neighboring threats that could be synthetically resolved, and lately detect the intruder UAV, causing the number of amended waypoints to be higher.
- With the same parameters of Rcf and sense range, high efficiency is obtained if the complete CR algorithm including the causal analysis is utilized rather than only the DDOA. With the positive impact of causal analysis, the average increment of efficiency is respectively 2.83% and 3.47% for SR = 9 km and SR = 3 km. Consequently, the causal analysis is effective for the selection of optimal resolution trajectory.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| 3D | Three dimensional |
| 4D | Four dimensional |
| ADS-B | Automatic Dependent Surveillance Broadcast |
| ASAS | Airborne Separation Assurance System |
| CA | Collision avoidance |
| CD | Conflict detection |
| CPA | Closet point of approach |
| CR | Conflict resolution |
| DDOA | Distributed dynamic optimization approach |
| NP | Non-deterministic polynomial |
| TCAS | Traffic Alert and Collision Avoidance System |
| TMA | Terminal Maneuvering Area |
| UAV | Unmanned aerial vehicle |
References
- Borra-Serrano, I.; Peña, J.M.; Torres-Sánchez, J.; Mesas-Carrascosa, F.J.; López-Granados, F. Spatial Quality Evaluation of Resampled Unmanned Aerial Vehicle-Imagery for Weed Mapping. Sensors 2015, 15, 19688–19708. [Google Scholar] [CrossRef] [PubMed]
- Ruiz, S.; Piera, M.A.; Del Pozo, I. A medium term conflict detection and resolution system for terminal maneuvering area based on spatial data structures and 4D trajectories. Transp. Res. C Emerg. Technol. 2013, 26, 396–417. [Google Scholar] [CrossRef]
- Netjasov, F.; Vidosavljevic, A.; Tosic, V.; Everdij, M.H.; Blom, H.A. Development, validation and application of stochastically and dynamically coloured Petri net model of ACAS operations for safety assessment purposes. Transp. Res. C Emerg. Technol. 2013, 33, 167–195. [Google Scholar] [CrossRef]
- Brooker, P. Airborne Separation Assurance Systems: Towards a work programme to prove safety. Saf. Sci. 2004, 42, 723–754. [Google Scholar] [CrossRef] [Green Version]
- Lai, C.P.; Ren, Y.J.; Lin, C. ADS-B based collision avoidance radar for unmanned aerial vehicles. In Proceedings of the IEEE MTT-S International Microwave Symposium Digest, Boston, MA, USA, 7–9 June 2009; pp. 85–88.
- Lin, Y.; Saripalli, S. Sense and avoid for Unmanned Aerial Vehicles using ADS-B. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6402–6407.
- BaraldiSesso, D.; Vismari, L.F.; Camargo, J.B. An approach to assess the safety of ADS-B based unmanned aerial systems. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 669–676.
- Wolf, T.B.; Kochenderfer, M.J. Aircraft collision avoidance using Monte Carlo real-time belief space search. J. Intell. Rob. Syst. 2011, 64, 277–298. [Google Scholar] [CrossRef]
- Tang, J.; Fan, L.; Lao, S. Collision Avoidance for Multi-UAV Based on Geometric Optimization Model in 3D Airspace. Arabian J. Sci. Eng. 2014, 39, 8409–8416. [Google Scholar] [CrossRef]
- Holt, J.; Biaz, S.; Yilmaz, L.; Aji, C.A. A symbiotic simulation architecture for evaluating UAVs collision avoidance techniques. J. Simul. 2014, 8, 64–75. [Google Scholar] [CrossRef]
- Prandini, M.; Hu, J.; Lygeros, J.; Sastry, S. A Probabilistic Approach to Aircraft Conflict Detection. IEEE Trans. Intell. Transp. Syst. 2000, 1, 99–220. [Google Scholar] [CrossRef]
- Manathara, J.G.; Ghose, D. Rendezvous of multiple UAVs with collision avoidance using consensus. J. Aerosp. Eng. 2011, 25, 480–489. [Google Scholar] [CrossRef]
- Mujumdar, A.; Padhi, R. Reactive Collision Avoidance of Using Nonlinear Geometric and Differential Geometric Guidance. J. Guid. Control Dyn. 2011, 34, 303–311. [Google Scholar] [CrossRef]
- Nikolos, I.K.; Valavanis, K.P.; Tsourveloudis, N.C.; Kostaras, A.N. Evolutionary algorithm based offline/online path planner for UAV navigation. IEEE Trans. Syst. Man Cybern. B 2003, 33, 898–912. [Google Scholar] [CrossRef] [PubMed]
- Luo, C.; McClean, S.I.; Parr, G.; Teacy, L.; De Nardi, R. UAV position estimation and collision avoidance using the extended Kalman filter. IEEE Trans. Veh. Technol. 2013, 62, 2749–2762. [Google Scholar] [CrossRef]
- Ragi, S.; Chong, E.K. UAV path planning in a dynamic environment via partially observable markov decision process. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2397–2412. [Google Scholar] [CrossRef]
- Lin, Y.; Saripalli, S. Path planning using 3D Dubins Curve for Unmanned Aerial Vehicles. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 296–304.
- Shim, D.H.; Sastry, S. An Evasive Maneuvering Algorithm for UAVs in See-and-Avoid Situations. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 11–13 July 2007; pp. 3886–3891.
- Lin, Y.; Saripalli, S. Collision avoidance for UAVs using reachable sets. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 226–235.
- Netjasov, F.; Vidosavljevic, A.; Tosic, V.; Everdij, M.H.C.; Blom, H.A.P. Stochastically and dynamically coloured Petri net model of ACAS operations. In Proceedings of the 4th International Conference on Research in Air Transportation (ICRAT), Budapest, Hungary, 1–4 June 2010; pp. 449–456.
- Kochenderfer, M.J.; Holland, J.E.; Chryssanthacopoulos, J.P. Next-generation airborne collision avoidance system. Lincoln Lab. J. 2012, 19, 17–33. [Google Scholar]
- Ruiz, S.; Piera, M.A.; Nosedal, J.; Ranieri, A. Strategic de-confliction in the presence of a large number of 4D trajectories using a causal modeling approach. Transp. Res. C Emerg. Technol. 2014, 39, 129–147. [Google Scholar] [CrossRef]
- Ross, A.M.; Rhodes, D.H.; Hastings, D.E. Defining changeability: Reconciling flexibility, adaptability, scalability, modifiability, and robustness for maintaining system lifecycle value. J. Syst. Eng. 2008, 11, 246–262. [Google Scholar] [CrossRef]
- George, J.; Ghose, D. A reactive inverse PN algorithm for collision avoidance among multiple unmanned aerial vehicles. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 3890–3895.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rcf (km) | Rcl (m) | Velocity (m/s) | Δt (s) | A (rad) | B (rad) |
|---|---|---|---|---|---|
| 1.2 | 100 | 30 | 1 | −1.047 | 1.047 |
| Time | ID | Amended Trajectory | Time | ID | Amended Trajectory | ||||
|---|---|---|---|---|---|---|---|---|---|
| X (m) | Y (m) | Z (m) | X (m) | Y (m) | Z (m) | ||||
| 17:17:48 | 370.43 | 510.68 | 669.57 | 17:18:10 | 593.19 | 733.44 | 721.53 | ||
| 17:17:50 | 387.85 | 528.10 | 686.68 | 628.79 | 779.87 | 572.48 | |||
| 17:17:52 | 406.44 | 564.10 | 701.14 | 17:18:12 | 614.07 | 754.32 | 716.18 | ||
| 17:17:54 | 425.92 | 566.17 | 713.00 | 614.12 | 754.47 | 578.76 | |||
| 17:17:56 | 446.44 | 586.69 | 720.60 | 17:18:14 | 633.94 | 774.19 | 705.67 | ||
| 17:17:58 | 467.54 | 597.79 | 723.66 | 599.14 | 728.52 | 580.34 | |||
| 17:18:00 | 488.67 | 628.92 | 721.03 | 17:18:16 | 651.64 | 791.89 | 689.14 | ||
| 17:18:02 | 509.24 | 649.50 | 713.75 | 584.16 | 702.58 | 578.76 | |||
| 17:18:04 | 529.85 | 670.10 | 720.90 | 17:18:18 | 667.72 | 807.97 | 669.57 | ||
| 668.57 | 848.77 | 532.96 | 569.50 | 677.18 | 572.48 | ||||
| 17:18:06 | 550.95 | 691.20 | 723.99 | 17:18:20 | 555.03 | 652.12 | 564.58 | ||
| 656.73 | 828.26 | 551.38 | 17:18:22 | 541.56 | 628.78 | 551.38 | |||
| 17:18:08 | 572.14 | 712.39 | 725.25 | 17:18:24 | 529.72 | 608.28 | 532.96 | ||
| 643.26 | 804.93 | 564.58 | |||||||
| UAV Number | Computation Time (s) |
|---|---|
| 20 | 0.92 |
| 60 | 5.28 |
| 100 | 17.62 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lao, M.; Tang, J. Cooperative Multi-UAV Collision Avoidance Based on Distributed Dynamic Optimization and Causal Analysis. Appl. Sci. 2017, 7, 83. https://0-doi-org.brum.beds.ac.uk/10.3390/app7010083
Lao M, Tang J. Cooperative Multi-UAV Collision Avoidance Based on Distributed Dynamic Optimization and Causal Analysis. Applied Sciences. 2017; 7(1):83. https://0-doi-org.brum.beds.ac.uk/10.3390/app7010083
Chicago/Turabian StyleLao, Mingrui, and Jun Tang. 2017. "Cooperative Multi-UAV Collision Avoidance Based on Distributed Dynamic Optimization and Causal Analysis" Applied Sciences 7, no. 1: 83. https://0-doi-org.brum.beds.ac.uk/10.3390/app7010083