Bibliometric Analysis of Social Robotics Research: Identifying Research Trends and Knowledgebase



Department of Innovation, Graduate School of Innovation Management, Tokyo Institute of Technology, Tokyo 108-0023, Japan
*
Author to whom correspondence should be addressed.
Appl. Sci. 2017, 7(12), 1316; https://0-doi-org.brum.beds.ac.uk/10.3390/app7121316
Submission received: 10 October 2017
/
Revised: 24 November 2017
/
Accepted: 13 December 2017
/
Published: 18 December 2017
(This article belongs to the Special Issue Social Robotics)
Abstract
:As robotics becomes ubiquitous, there is increasing interest in understanding how to develop robots that better respond to social needs, as well as how robotics impacts society. This is evidenced by the growing rate of publications on social robotics. In this article, we analyze the citation network of academic articles on social robotics to understand its structure, reveal research trends and expose its knowledgebase. We found eight major clusters, namely robots as social partners, human factors and ergonomics on human robot interaction, robotics for children’s development, swarm robotics, emotion detection, assessment of robotic surgery, robots for the elderly and telepresence and human robot interaction in rescue robots. In addition, despite its social focus, social science literature as a source of knowledge is barely present. Research trends point to studies on applications, rather than to specific technologies or morphologies, and in particular, towards robots as partners, for child development and assistance for the elderly.
1. Introduction
Robotic technologies are becoming ubiquitous. Robots are expanding beyond the structured and repetitive environments of factories to take positions in the service sector, not only for professional, but also for personal and domestic use. However, these new workplaces present challenges. Not only are they unstructured environments, but the tasks at hand are more complex with requirements varying constantly. Even more importantly, there is a frequent interaction with users in this setting. Robots are now situated in a social context, where users unconsciously project norms that are intrinsically human to the machines [1]. Therefore, robotic technologies are expected to fit certain social norms in order to facilitate interaction. Social robotics as a field of research appears to bring a better understanding of this complexity.
Social robotics is defined as “the study of robots that interact and communicate among themselves, with humans, and with the environment, within the social and cultural structure attached to their roles” [2]. Journals and conferences usually attempt to confine the field by focusing on topics like affective and cognitive science for socially-interactive robots, biomechatronics, intelligent control and artificial intelligence for social robotics, social attention, tracking and gaze, and so on [2,3]. This field also overlaps with other subfields of robotics, computer science and engineering. Therefore, social robotics must be understood in the context of the greater field of robotics. However, while there is plenty of literature tackling the definition and characteristics of social robots [4,5,6,7,8], no research has tried to comprehend social robotics as a field.
The objective of this article is to study the structure of social robotics research. We intend to answer the following questions: What is the position of social robotics in the general landscape of robotics? What are the main topics of research? What are its research trends and knowledgebase. When research topics are young, it is expected that the community of researchers involved has a good understanding of the core research trends. However, as the topic grows, having a complete overview becomes challenging. Computer-based approaches are helpful to sort such difficulties. They can bring a comprehensive and unbiased picture regardless of the size of the field [9]. For that purpose, we use bibliometrics, which is the application of computer-based techniques for the analysis of publication data, in this case academic articles published in journals or conference proceedings.
Bibliometrics has become an important tool to grasp the entire perspective of a research domain, especially when the amount of publication is large and its delimitation is complex. By exploring several features of academic articles, we can expose the pillars of knowledge by which a research field is supported [10]. Additionally, the taxonomy of a field can be revealed by creating maps of science, or academic landscapes. Various techniques have been used to map a large corpus of literature, such as maps of all scientific knowledge [11] or mapping specific ones like nanobiotechnology [12].
Bibliometric techniques have been previously applied to the field of robotics. An overview of the field has been conducted to discover the strengths and weaknesses of Japanese robotics [13], Goeldner et al. analyzed patents and publications on care-robotics [14], and Ittipanuvat et al. [15] used academic landscapes to establish connections between robotics and gerontology. Publications in the field have also been linked to social issues detected in news articles [16]. By using similar methodologies, we explore the case of social robotics.
2. Materials and Methods
A summary of the data collection and treatment is shown in Figure 1. Data were collected from the Web of Science, a widely-used database of bibliographic information. The Web of Science incorporates the Science Citation Index Expanded, the Social Sciences Citation Index and the Arts & Humanities Citation Index, covering more than 18,000 journals and conference proceedings. We searched for social robotics articles by querying “robot* and soci*” in the Web of Science search engine. The asterisk serves as a wild card, allowing one to extract articles having words starting with “robot” or “soci” (e.g., robots, robotics, social, society) in either the title, abstract or keywords. A total of 7129 articles was found. However, such an approach is prone to retrieve articles containing the query that may not be directly related to the field. To filter out the unrelated articles, we used the properties of the citation networks. We focused on articles that included at least one reference to another article in the retrieved dataset and neglected the rest. Ultimately, 3334 (46.8%) articles matched this condition.
To study the position of social robotics in relation to the greater field of robotics, we also retrieved articles with the query “robot*”, obtaining 200,139 articles out of which 142,587 (71.2%) were connected by references. Data were retrieved on 1 July 2017.
As mentioned above, the list of references was used to create a citation network of articles. A direct linkage is established between two articles if one of them mentions the other in its references. This is known as an intercitation or direct citation. Compared to other linkage methodologies like co-citation [17] and bibliographic coupling [18], direct citation networks have been found to bring out the most accurate representation of knowledge taxonomies [19] and be better at identifying research fronts [20]. We extracted the largest connected component, which has the most tightly connected structures of knowledge related to our research target. Within the largest component, we identify clusters of papers densely connected by applying a topological algorithm based on modularity maximization. Modularity is a measure of the strength of connections within partitions or clusters. A high modularity value implies that intra-cluster connections are dense, whereas inter-cluster connections are sparse. It is defined as follows [21]:
where is the number of clusters, and are the number of links and the sum of the degrees of nodes within cluster , respectively. The algorithm iterates until the maximum modularity is reached, thus obtaining the number of clusters automatically. The network is then visualized by applying a spring layout suitable for large networks, which places similar clusters close to each other [22]. To facilitate the interpretation of the network, we visualized only the internal edges of each cluster and then assigned them different colors.
Once the clusters are obtained, we revised the articles within them and labeled each cluster based on the contents of their most cited academic articles.
3. Results
3.1. Robotics and Social Robotics Research
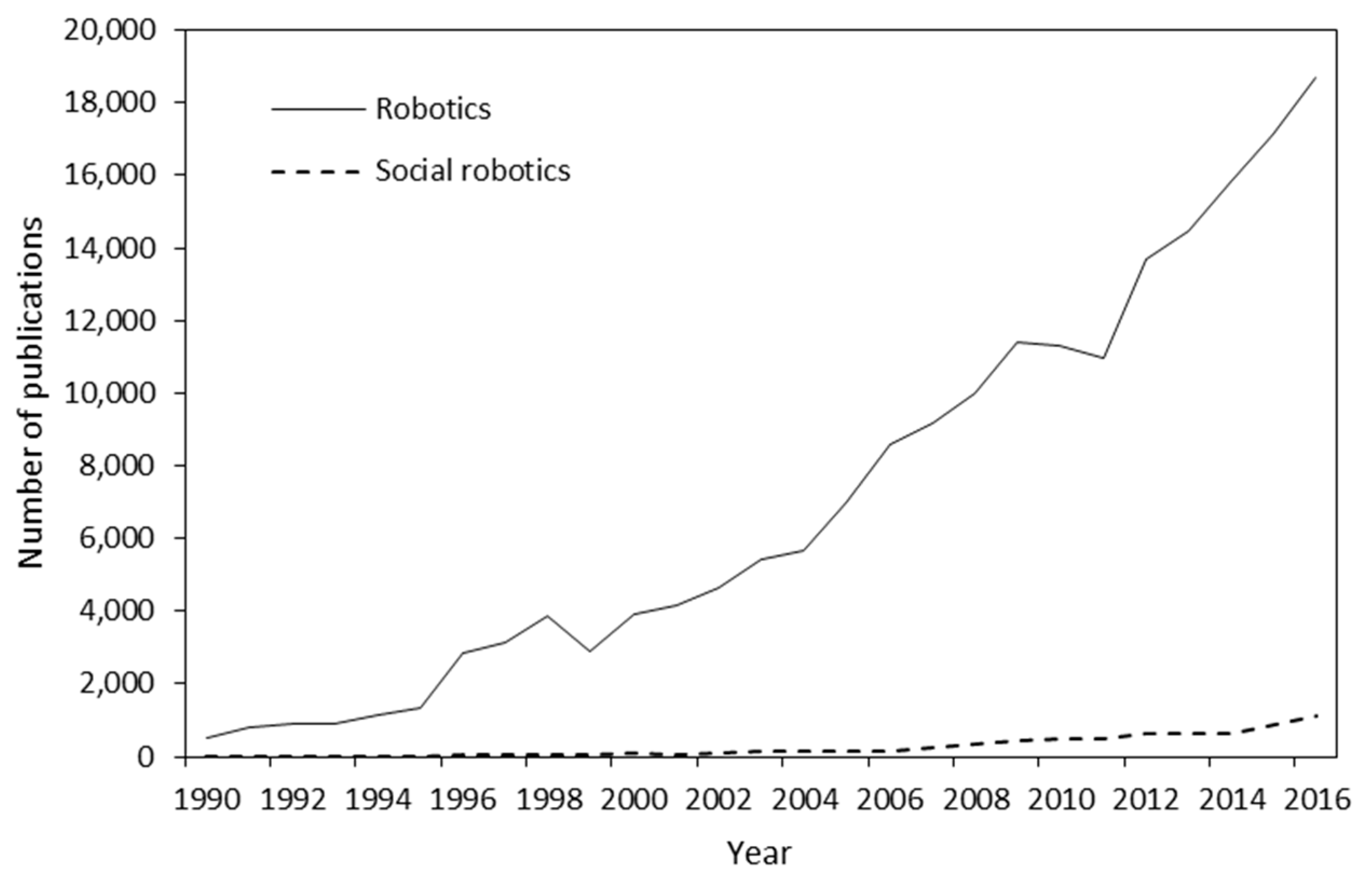
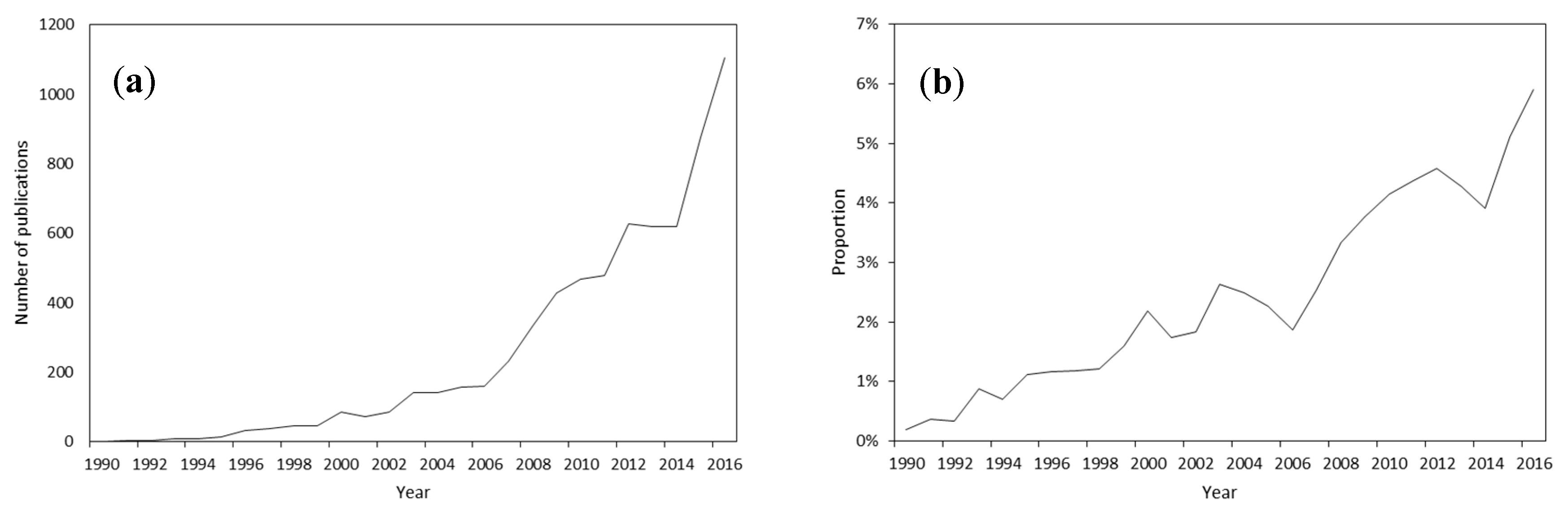
We obtained academic article data from the robotics and the social robotics fields. Yearly trends of publishing from 1990–2016 are shown in Figure 2. Both sets show a growing trend. Robotics is a large field that aggregates multiple types of technology and research, in which social robotics seems like a small and specific subfield. Social robotics data represent 2.33% of robotics research. However, a closer inspection also reveals the accelerating pace of publishing in social robotics. Figure 3a is a zoom-in to the trends of publishing of social robotics. We found discussions on social robotics as early as 1970 [23]. However, it was not until the mid-1990s [24,25,26,27,28] that the field started growing. After 2006 and 2014, we can observe a larger amount of publications. Figure 3b shows the yearly proportion of social robotics articles in relation to all robotic research published the same year. The growing trend, despite the also ever-growing amount of articles on robotics, may serve as an indicator of the relevance of the field.
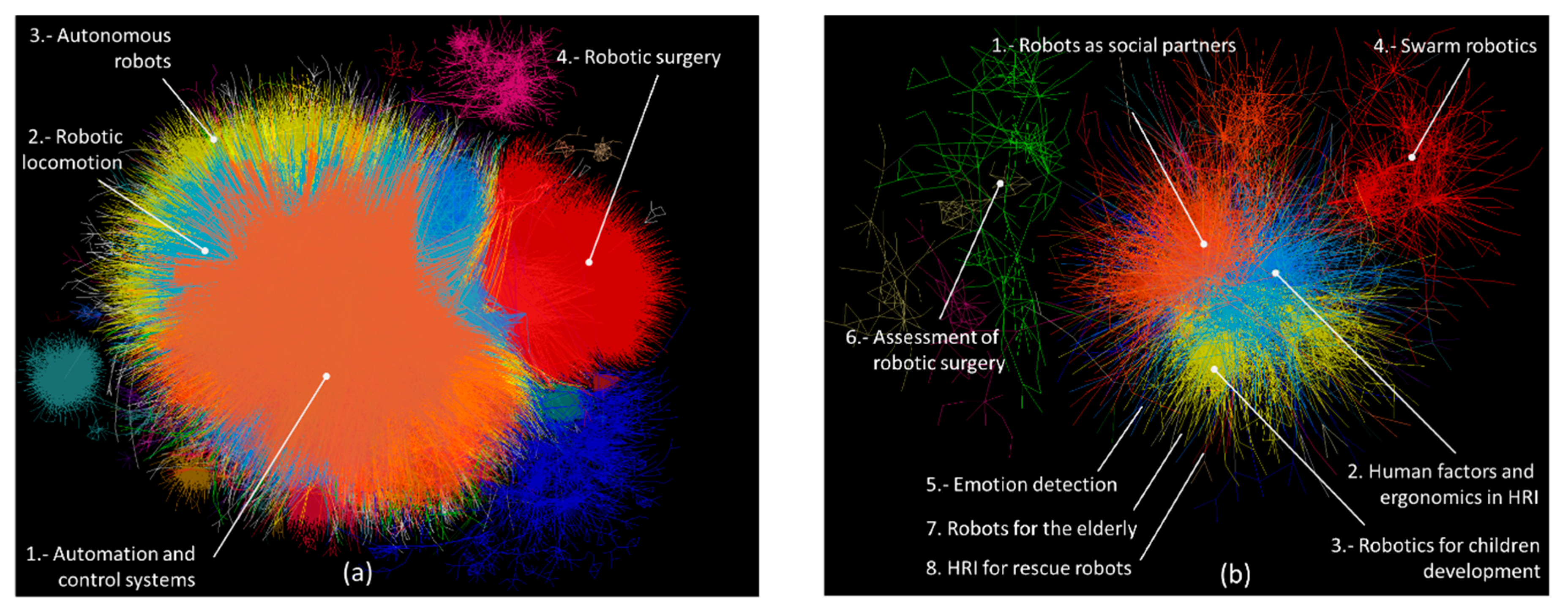
We also created two citation networks by exploiting the reference information of the articles in each dataset. Figure 4 shows the robotics network and social robotics network, composed of 142,587 and 3334 articles, respectively. They were built independently, and the colors of the clusters do not imply a relationship between the two. We found 647 clusters in the robotics network. However, the four largest clusters compose 92% of the articles. We labeled these as automation and control systems, robot locomotion, autonomous robots and robotic surgery. Given their sizes, we sub-clustered them to reveal their internal structure. On the other hand, 90% of articles on social robotics were divided into eight clusters as shown in Figure 4b. The details of the cluster sizes are shown in Table 1 and Table 2, respectively.
3.2. Research Trends in Social Robotics
We explore the citation network of social robotics. Table 3 presents a summary of the clusters including the most cited article and most frequent countries, organizations, journals or conferences and authors.
Social robotics is a heterogeneous field. The classification includes a cluster of case studies for specific applications, technologies and assessment tools. On average, clusters span from 2010–2013, with swarm robotics and the assessment of robotic surgery being the oldest and youngest clusters, respectively. The USA is the country with the largest participation in every cluster, followed by England and Japan.
At the institution level, there is no dominance. We identified 32 different institutions frequently publishing in either cluster, with Osaka University appearing in the top ranking of four of them being the most frequent one.
In the case of journals and conferences, lecture notes on artificial intelligence appears in seven of the clusters, while the International Journal of Social Robotics and the ACM-IEEE international conference on human robot interaction appear in five. An overall distribution of the largest publishing venues is shown in Table 4. Finally, the authors having more publications in the network are Ishiguro, H., Dautenhahn, K., Kanda, T., Hagita, N. and Breazal, C.
In the following sections, we discuss the contents of the clusters, highlighting the core aspects investigated within them. The first one, robots as social partners, collects case studies where researchers observe individuals interacting with robots in order to understand patterns of human behavior or explore the challenge in building and designing robots for specific scenarios of interaction. In this cluster, robots are usually applied as caregivers, game partners or guides [29,36]. The cluster also covers literature on collaborative robotics [37], a type of highly autonomous, mobile robot that can also serve as a collaborator in industrial settings. We found research on the challenges of task planning and programming of this type of robotics, pointing towards the need for better performance evaluation tools, ease of adaptability and safety and compliance [38].
Cluster 2, human factors and ergonomics in human robot interaction, focuses on the human views of robotics. Discussions on the uncanny valley [39] and anthropomorphism [40] are a common trend in this group of research. In particular, it focuses on how to achieve human-like communication. Recent discussions cover better design of artificial on-screen agents and robots [41]. Fear and likability [42] are common aspects measured in these articles.
The third cluster is robotics for child development. Robots are studied as entertainers or educators with emphasis on their application as a therapy tool in the context of autism spectrum disorders [43,44]. The role of robot appearance in raising trust and comfortability in children is one of the key aspects studies [45]. Furthermore, models of learning and language acquisition are found [46].
The fourth cluster is swarm robotics. While the core of social robotics research places the robot as an interactive partner with the human, swarm robotics studies groups of robots that behave as a society. Here, we find new developments in robot-to-robot communication technologies [47] and the translation of social behaviors to robotic systems [31,48]. New developments on collective and coordinated motion are the core of this cluster.
Emotion detection is the fifth largest cluster. Algorithms for the interpretation and understanding of emotions, as well as new achievements in sensing technologies are discussed [49,50]. Non-verbal communication is the target of this research.
Assessment of robotic surgery appeared as the sixth cluster. This tangential topic studies the social impact of the introduction of robotics for surgery. New robot surgery technologies are benchmarked against traditional methods, to evaluate the benefit for the patients, as well as cost and performance [33].
Cluster 7 deals with telepresence and robots for the elderly. Articles in this group study the benefits of communicating not only through audio or video, but integrating fully expressive actions in the robots, which may be operated from a distant location. Telepresence has been found more engaging than static robotic systems [34,51]. This research is applied in robotics care for the elderly and is aimed to smooth the communication process.
The last cluster is human robot interaction in rescue robots. This cluster is about robotics working with humans in hostile environments, rescue strategies and multi-agent teamwork coordination [35]. It also includes advanced cognition technologies for fully-autonomous robots [52]. Pattern recognition techniques are also of relevance [53,54].
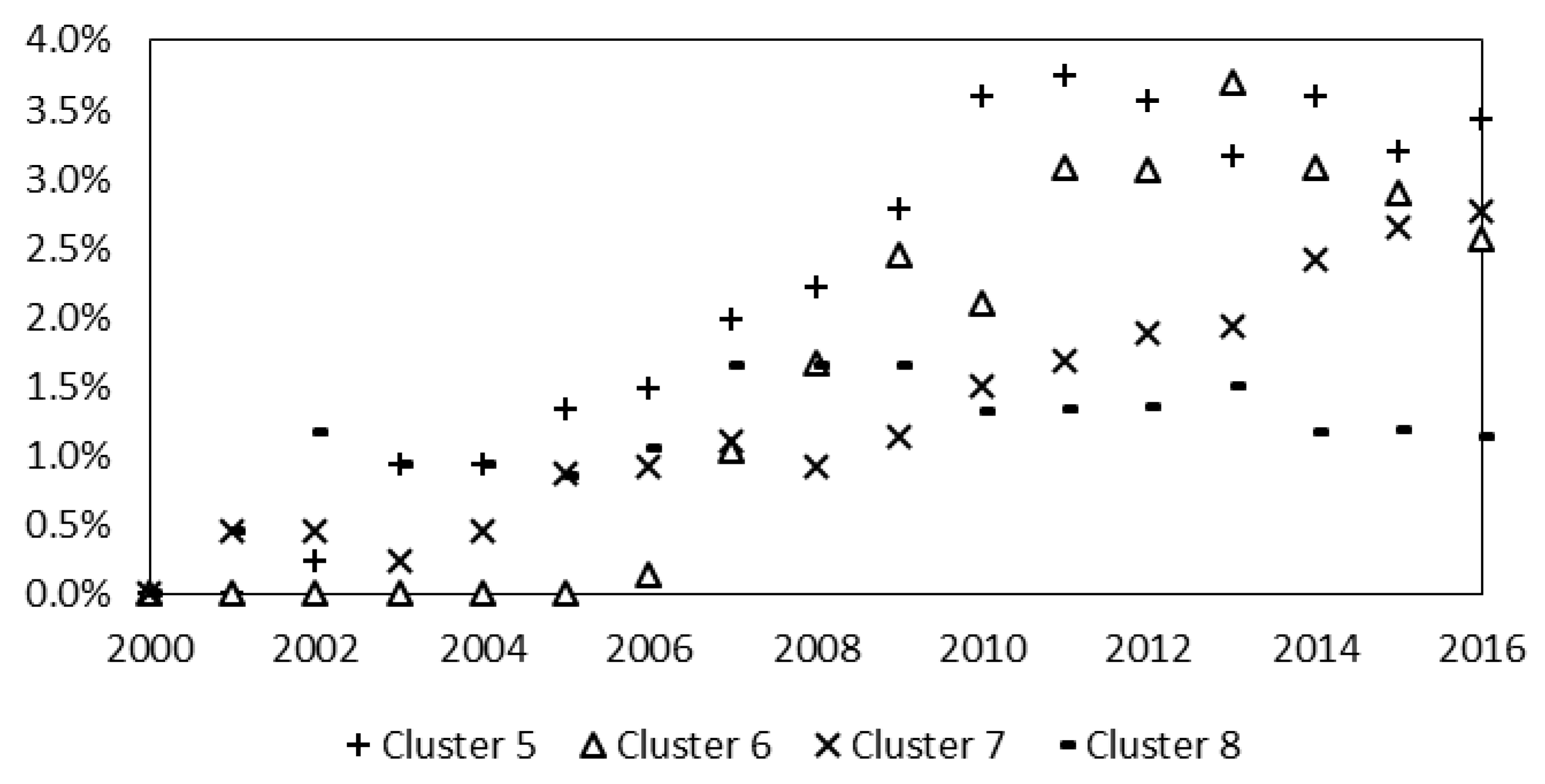
Finally, we examine the trends of publication for each cluster. Figure 5 and Figure 6 show the yearly share of articles from 2000–2016. Clusters 1 and 7 show increasing trends, while Cluster 5 grew close to 4% until 2005 and has remained steady since then. Clusters 2 and 3 also have remained stable across the history of the social robotics. Swarm robotics, Number 4, had the highest attention around 2005. The smaller Clusters 5–8 in Figure 6 had little participation before 2006.
4. Discussion
The number of articles published every year on social robotics is rapidly increasing. This seems to correspond to increasing trends in media attention towards robotics technologies [55] and also favorable trends in the market. The International Federation of Robotics estimates that around 5.4 million service robots for personal or domestic use were sold in 2015, an increase of 16% in relation to the previous year. Projections point to 42 million units sold by 2019 [56]. In this scenario, the relevance of social robotics comes to the surface. There is a constant need to understand how to create robots that are socially appealing and how the introduction of these robots impact society as a whole. Social robotics is the field that attempts to bring that understanding. However, it is a blurry field of research with interdependences on other corpora of knowledge. In this section, we discuss the differences and relationships of social robotics and the greater domain of robotics research of which it is a part.
4.1. Structural Difference between Robotics and Social Robotics Research
With respect to the contents of clusters identified in Table 1, robotics research seems to resemble a gradient from basic to applied research. Automation and control systems refer to the collection of articles about actuators, sensing, programming devices and frameworks that enable robotics systems in general. Robotics locomotion tackles mobile robotics. Mobile robotics as a research field can be considered the originator of what is known today as service robotics. Therefore, it is a more specialized field. The third is autonomous robots. This goes a step further on the mobile robotics research, containing articles of technologies for robotics in unstructured environments. Finally, we come to robotics surgery, where articles focused on research and development of robotics systems that help doctors or patients during medical interventions.
On the other hand, social robotics is heterogeneous in nature. Some clusters focus on robot applications (Clusters 1, 3 and 7), and others target specific types of robotics (Clusters 4 and 8) or specific technologies or components (Cluster 5). Moreover, we found Cluster 2, where the subject of the study is focused on the person that interacts with the robot, not the robotic system. There is also one regarding evaluation tools (Cluster 6). This heterogeneity is not only revealed in the contents, but also in the network structure.
The topological features of the network, as can be seen in Figure 4b, suggest the presence of three major streams of research. The core of the social robotics research in the center contains Clusters 1, 2, 3, 5, 7 and 8. On the top-right, we found Cluster 4 corresponding to swarm robotics, a densely-connected cluster, but slightly separated from the rest. In addition is a sparsely-connected section on the left where Cluster 6 is located, corresponding to articles on the evaluation of robotic surgery. In other words, social robotics research can be defined by these three dimensions: human-robot interaction, robot-to-robot communication and the social impact of robotics.
4.2. Current Context of Social Robotics in Robotics Research
We computed the participation of social robotics papers in the larger network of robotics research. The results are shown in Table 5. The four largest clusters, and the three largest sub-clusters within them, contain 90% of the social robotics articles, and the other 10% is scattered in the remaining small clusters of the large network. Social robotics research is concentrated on the robot learning sub-cluster of robotic locomotion and heavily concentrated in the human robot interaction sub-cluster of autonomous robots.
The robot learning sub-cluster contains research on robotics learning from demonstration [57], self-reconfigurable robot systems [58] and artificial intelligence methods for movement planning and world representation [59]. It covers research on machine learning techniques that can be applied in robotics systems to decide actions and trajectories.
The human-robot interaction sub-cluster, as shown in Table 5, gathers 58.8% of social robotics articles. Besides containing the largest proportion of the data under study, it collects research directly related to it. We deemed it pertinent to take a closer look into this sub-cluster and conducted a separate analysis shown in Appendix A.
The field of social robotics is cohesive. Some emergent academic sub-fields may get dispersed in the clusters of the larger domain [12]. However, we found that a large proportion (58.8%) of social robotics articles remained connected. This may serve as an indicator that the field is maturing, having enough specific material to be cited, and thus staying connected.
A closer inspection of the references supports that statement. The amount of unique references within the robotics domain is evenly distributed among the four clusters that compose the robotics research as shown in Table 6. However, those articles belonging to robotic locomotion and autonomous robots are more frequently cited; meaning that social robotics enjoys a broad robotics knowledgebase, with a clear concentration toward applied technologies.
4.3. Missing Elements in the Current Social Robotics Research and Future Perspectives
Not all of the knowledgebase of social robotics belongs to the robotics domain. In this section, we explore other sources of knowledge that are represented or misrepresented from a citation analysis point of view. We also comment on key differences with the overlapping field of human-robot interaction.
To reveal sources of information other than those in the robotics network, we measured the amount of references pointing to any article in the robotics research network and compared it to the amount of references outside it. Table 7 shows the results. We found 144,715 unique references, from which only 7% belongs to the robotics research network. However, on average, articles in the network receive more citations than those outside.
References to outside material does not necessarily mean apart from robotics, but to books or unindexed robotics literature; or indexed and unindexed material other than those related to robotics. The most cited material of this nature is listed in Table 8. It includes key books on the field, articles on robotics from unindexed journals, the original article on the Uncanny Valley in Japanese and material that explores the topic of robotics from a social science perspective. Material of the last type includes: the media equation, which argues that there is a natural human predisposition to treat computer interfaces as people, even though the user is aware that they are not real. The work of Reeves is then referenced when tackling the design of social robotics; while the work of Hall in the hidden dimension is an anthropological study on the use of space. The term “proxemics” was introduced here, referring to the measurement of social, personal and intimate distance and how it differs across cultures and situations. Social roboticists refer to this work when they try to implement proxemics in robotic systems, as robots should understand how close they can get to the human counterpart for an effective interaction [60]. Finally, machines and mindlessness by Nass, C., coauthor of the media equation, explores how individuals apply gender and ethnic stereotypes to computer agents and also explores the topic of anthropomorphism.
These are among the few examples of highly cited material from the social sciences. In general, highly cited material from outside the network is also related to robotics. Social robotics is social in its intention, but its knowledgebase is concentrated in the engineering and technology domains. It has been discussed that researchers in this field have a technologically determinist view [68], and the lack of source material from other engineering domains seems to support that argument. Additionally, the insufficient evidence of a knowledgebase from other domains may raise the question of how engineers know if they are applying the right instruments when measuring social, cultural or psychological cues, or in the words of Bartneck et al. in this regard: “most engineers who develop robots are often unaware of this large body of knowledge, and sometimes run naïve experiments in order to verify their designs” [69].
Finally, in this study, we analyzed academic papers of social robotics under a narrow definition and restrictive methodology. By setting the boundaries of our data selection to articles explicitly mentioning the words “robots” and “society”, or their variations, we left out peripheral technologies and research that can be associated with social robotics. Therefore, it can be argued that the described network is incomplete. This notwithstanding, it represents the very core of social robotics.
To overcome this limitation, we also studied the most related sub-cluster in the robotics network, the human-robot interaction sub-cluster that is shown in Appendix A. We found larger clusters describing the same topics discussed in social robotics, but there were also some differences. Military robotics and robot-ethics appeared, whereas swarm robotics and the assessment of robotics were not found. Human-robot interaction also contains clusters about enabling technologies, like cloud computing, robotic frameworks that are not directly related to social robotics. It is not possible to establish sharp boundaries between clearly overlapping fields. However, we could get a comprehensive view by comparing both.
Similar to human-robot interaction, the concept of “collaborative robotics” is rather ubiquitous to new research trends. We found articles on collaborative and cooperative robotics in a variety of topics in both the social robotics network, as in specific applied research within the larger landscape of robotics. While collaborative robots have application in several environments, they are primarily associated with the manufacturing industry, where their higher degree of mobility and autonomy enables them to handle objects simultaneously with the human counterpart, among other abilities. So far, this type of interaction has been heavily regulated to comply safety standards [70,71], but new developments [72,73] may soon make it possible to establish a breakthrough, thus having an intrinsic social impact on the production system and labor. From a bibliometric perspective, we could not find a cohesive cluster of cooperative robots. This might be either because of its nature as an emergent topic or its ubiquity. However, the presence of its associated keywords suggests an increasing interest in academia.
The present article brought a snapshot of the actual state of research of social robotics, and subsequent follow up overviews may help to reveal the rise or decline of academic topics. The methodology presented here is optimized for the mapping of topics where the community of researchers has achieved a uniform vocabulary and coherent citation patterns. Thus, very new or specific topics (for instance, those targeted at national-level projects) may be out of reach to be seen as clusters, and its outputs may get diluted in their most related research topics. Tracking the evolution of academic topics from their birth in specific projects to their consolidation as complete academic domains is an avenue that we leave open for future research.
5. Conclusions
In this article, we studied social robotics from a bibliometric perspective. Academic publications were used to create an academic landscape based on the citation information. By applying algorithms from network theory, we extracted highly connected communities of articles that represent clusters of knowledge. We found eight clusters covering applications, case studies and specific technologies.
While the targets of study of each cluster are heterogeneous, we could identify three streams of research. First, in the core of social robotics, humans and robots are situated as partners. Researchers investigate what individuals think and feel when interacting with a robot. That knowledge is exploited to build and design robots that better respond to different social contexts. The second and third streams cover only a small fraction of social robotics research, being the study of robots as communities and the social impact assessment of robotic technologies, respectively.
In robotics for child development, in particular, the usage of robots as a therapy tool for the treatment of autism disorders has been a constant topic since the beginning of the field. Other topics show the constant and increasing trends of robots as assistants for the elderly, the study of human factors for robot design and emotion detection.
By revealing the natural partitions in the knowledge production of social robotics, we expect to benefit two groups of stakeholders: policymakers are provided with an objective view of the actual state of the field, and younger researchers can explore the core trends or look for those specific topics on the rise.
Acknowledgments
Part of this research was supported by the Japan Society for the Promotion of Science (JSPS) Grant-in-Aid for Scientific Research (A) 26245044. This research is partially supported by a scholarship from the Ministry of Education, Culture, Sports, Science and Technology of Japan.
Author Contributions
This article has been written by Cristian Mejia and revised by Yuya Kajikawa.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A. Bibliometric Analysis of Human-Robot Interaction Research
From the structure of the robotics network, the sub-cluster of human-robot interaction (HRI) was found as part of the autonomous robots research cluster. This sub-cluster collected 58.8% of articles from social robotics. We compared the contents of HRI with the social robotics network to understand their similarities and differences.
Besides the creation of citation networks, we compared the contents of the two by computing the cosine similarity score between the textual information of each pair of clusters. Cosine similarity is defined as follows:
where and are clusters in each network and and are the term-vectors of and respectively. The vectors are created from the words found in the title, abstract and keywords of the articles within each cluster. Terms are weighted by the term-frequency inverse document frequency (tf-idf) [74]. Cosine similarity with tf-idf is a common and effective strategy to determine the similarity of documents in text mining [75].
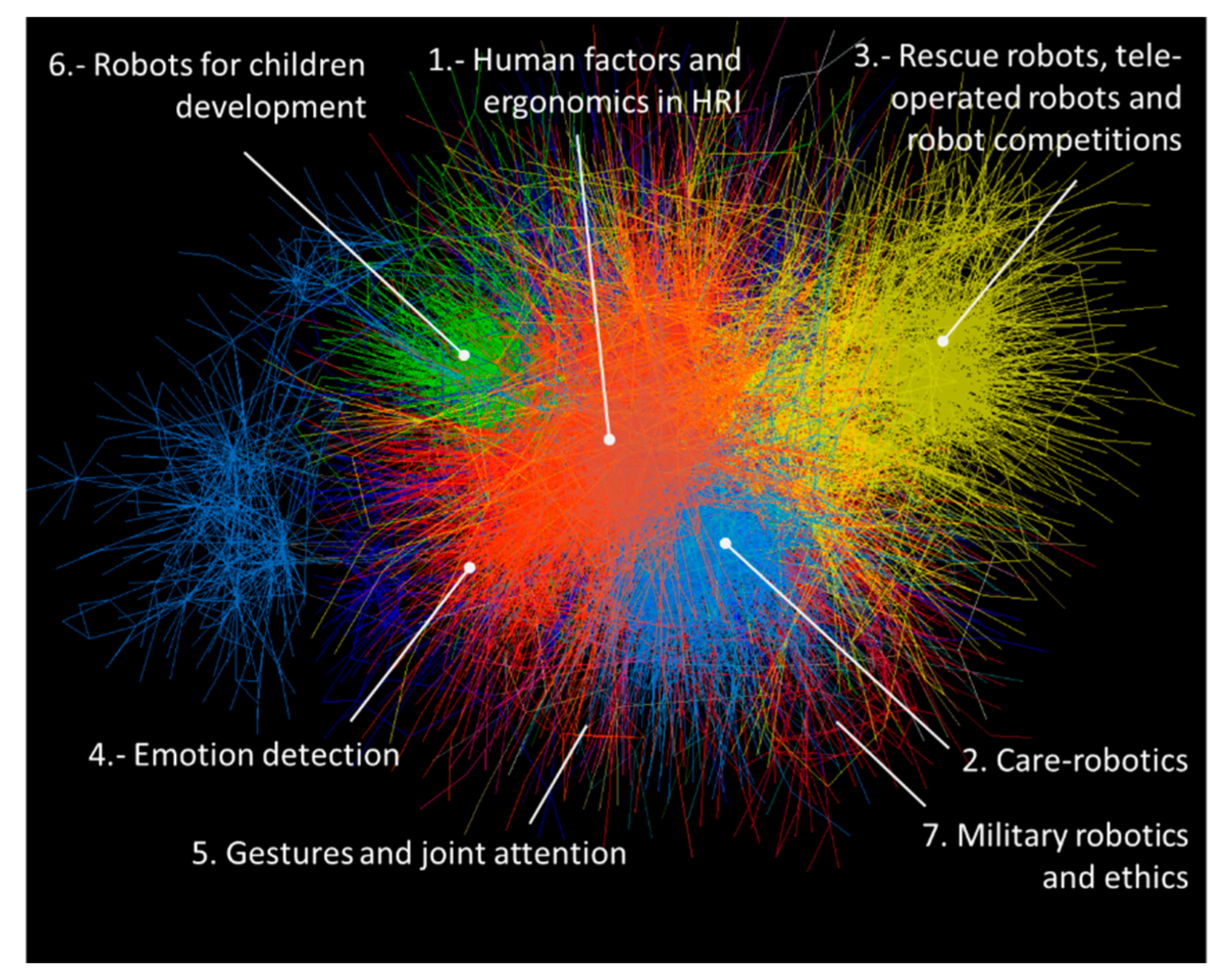
The citation network of HRI is shown in Figure A1. Ninety percent of the articles are represented by the 10 largest clusters. In the figure, only seven are shown; the rest are hidden behind those larger ones. The complete list of clusters is given in Table A1, including the number of articles, average year and the article receiving the most citations within the cluster.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table A1.
Sub-clusters of human-robot interaction (HRI).
| # | Sub-Cluster | Size | Average Year | Most Cited |
|---|---|---|---|---|
| 1 | Human factors and ergonomics in human robot interaction | 1296 | 2012.0 | [5] |
| 2 | Care-robotics | 1254 | 2010.8 | [76] |
| 3 | Rescue robots, tele-operated robotics and robot competition | 1239 | 2010.7 | [35] |
| 4 | Emotion detection | 689 | 2010.6 | [77] |
| 5 | Gestures and joint attention | 530 | 2011.5 | [78] |
| 6 | Robot for child development | 497 | 2012.8 | [30] |
| 7 | Military robotics and ethical issues of robots | 203 | 2012.2 | [79] |
| 8 | Algorithms and technologies for care robotics | 199 | 2011.4 | [80] |
| 9 | Hand controllers, robot networks | 186 | 2012.2 | [81] |
| 10 | Real versus on-screen agents | 95 | 2010.5 | [82] |
Figure A1.
Visualization of seven sub-clusters of human-robot interaction (HRI).

HRI Sub-clusters 1, 2, 3, 4 and 6 are an expansion of those found in social robotics. They contain the literature from social robotics and robotics papers that cite or are cited by those. In HRI, the cluster we labeled as care-robotics is the merger of robots as partners and robots for the elderly.
Other clusters were different from any of the social robotics. HRI Sub-cluster 5, gestures and joint attention, is the research on specific technologies solving the problem of gesture recognition, gesture commands and robot understanding of pointing behavior. Sub-cluster 7, military robotics and ethical issues of robots, targets those technologies for warfare and the development of smart weapons [83]. While robot-ethics may have been expected to also appear in the network of social robots, we found that ethical concerns are discussed in light of military robots [84], thus forming a single cluster.
HRI Sub-cluster 8 is similar to HRI Sub-cluster 2; both deal with care-robotics. However, sub-cluster 2 is focused on applications, challenges and user views, while Sub-cluster 8 covers technologies that make these robots possible. Voice recognition systems [85] and especially designed actuators [86] are found here.
HRI Sub-cluster 9 is diverse. The main literature targets the development of safe controllers for the task of object handover [87], but also general frameworks, such as cloud networked robotics, are studied [88]. Finally, HRI Sub-cluster 10 covers the difference in interacting with robots versus on-screen agents or characters [82]. Experiments are situated in the classroom context [89] and usually by using humanoids [90].
The present analysis also revealed the complex nature of HRI, as the contents of Sub-clusters 2 and 9 share similarities with those of Sub-clusters 2.3 rehabilitation robotics and 3.3 tactile sensing and robotic grasping in Table 1, respectively. However, the focus on hardware or theoretical discussion of the algorithms of those in Table 1 set them apart from the HRI hierarchy described in this section.
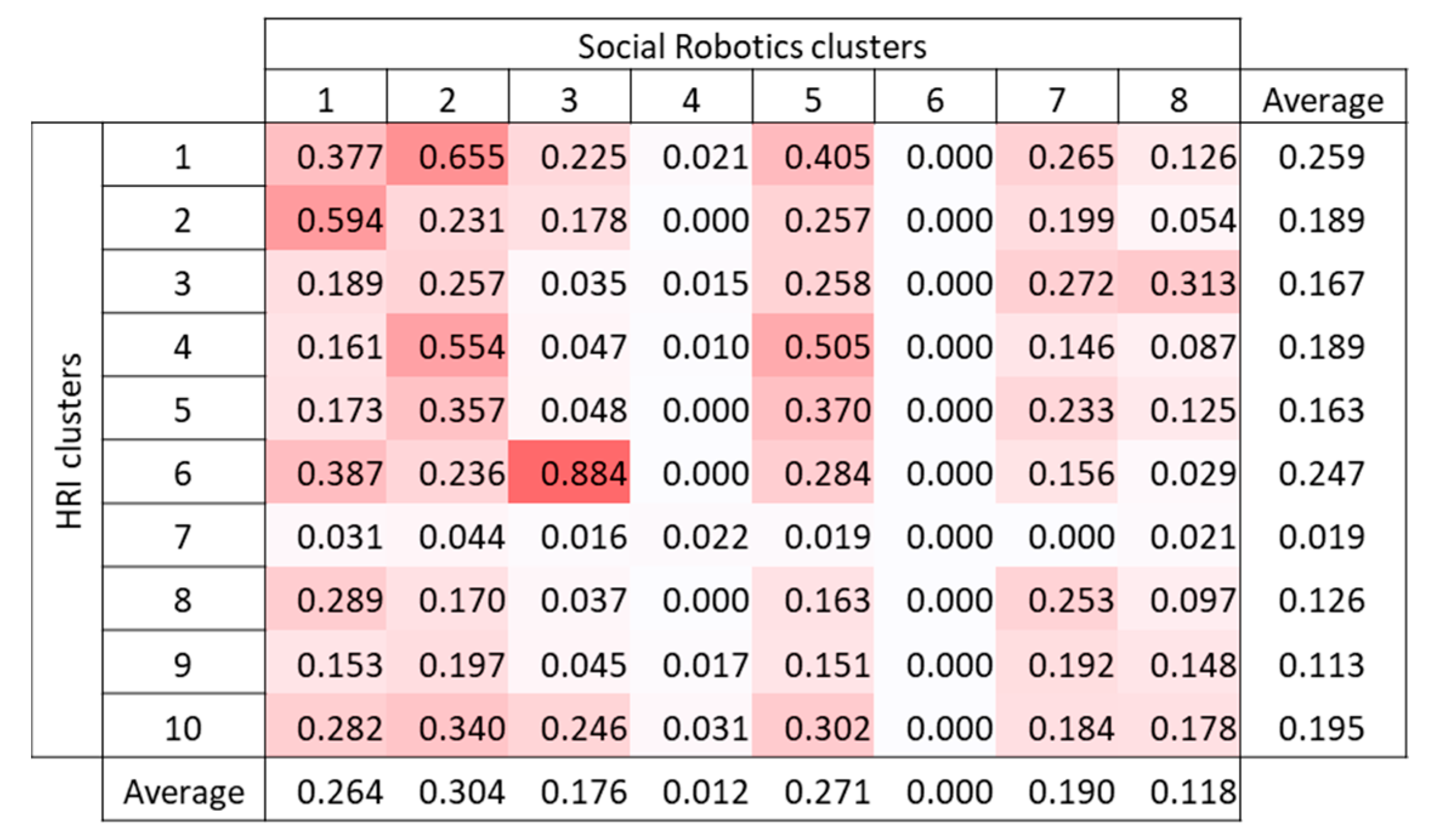
We conclude our comparative analysis by discussing the textual content differences between the two fields. Figure A2 shows the content similarity between the clusters. From the perspective of social robotics, research on swarm robotics (Cluster 4) and assessment of robotic surgery (Cluster 6) is different from the content in HRI. In addition, HRI Sub-clusters 7, 8 and 9 are less similar to the social robotics discussion. This is due to the different nature of military robotics research and the highly technical contents of Clusters 8 and 9.
Figure A2.
Heatmap analysis based on the cosine similarity of cluster contents. The intensity of red varies according to the similarity score, being 1 a perfect content match between the pair of clusters.
Figure A2.
Heatmap analysis based on the cosine similarity of cluster contents. The intensity of red varies according to the similarity score, being 1 a perfect content match between the pair of clusters.

Human factors and ergonomics, robots for child development, emotion detection and rescue robots are common topics whose contents and structure are similar in both fields. HRI aggregated robots as social partners, and robots for the elderly fall into the broader category of care-robotics. Swarm robotics and assessment of robotics for surgery comprise a type of research unique to social robotics. On the other hand, discussions on robot ethics are tied to military robots and appeared in HRI only. HRI also includes clusters whose contents are more technical, covering algorithms and components for specific tasks.
References
- Reeves, B.; Nass, C. The Media Equation: How People Treat Computers, Television, and New Media Like Real People and Places; Center for the Study of Language and Information: Stanford, CA, USA, 2003. [Google Scholar]
- Ge, S.S.; Matarić, M.J. Preface. Int. J. Soc. Robot. 2009, 1, 1–2. [Google Scholar] [CrossRef]
- ICSR Call for Papers. Available online: http://www.icsr2017.org/ (accessed on 14 September 2017).
- Hegel, F.; Muhl, C.; Wrede, B.; Hielscher-Fastabend, M.; Sagerer, G. Understanding Social Robots. In Proceedings of the Second International Conferences on Advances in Computer-Human Interactions, Cancun, Mexico, 1–7 February 2009. [Google Scholar]
- Fong, T.; Nourbakhsh, I.; Dautenhahn, K. A survey of socially interactive robots. Robot. Auton. Syst. 2003, 42, 143–166. [Google Scholar] [CrossRef]
- Breazeal, C. Front Matter. In Designing Sociable Robots; The MIT Press: Cambridge, MA, USA, 2004; ISBN 9780262255837. [Google Scholar]
- Steinert, S. The Five Robots-A Taxonomy for Roboethics. Int. J. Soc. Robot. 2014, 6, 249–260. [Google Scholar] [CrossRef]
- Duffy, B.R.; Rooney, C.F.B.; Hare, G.M.P.O.; Donoghue, R.P.S.O. What is a Social Robot? In Proceedings of the 10th Irish Conference on Artificial Intelligence & Cognitive Science, University College Cork, Ireland, 1–3 September 1999; Available online: http://hdl.handle.net/10197/4412 (accessed on 14 September 2017).
- Kostoff, R.N.; Schaller, R.R. Science and technology roadmaps. IEEE Trans. Eng. Manag. 2001, 48, 132–143. [Google Scholar] [CrossRef]
- Buter, R.K.; Van Raan, A.F.J. Identification and analysis of the highly cited knowledge base of sustainability science. Sustain. Sci. 2013, 8, 253–267. [Google Scholar] [CrossRef]
- Boyack, K.W.; Klavans, R.; Borner, K. Mapping the backbone of science. Scientometrics 2005, 64, 351–374. [Google Scholar] [CrossRef]
- Takeda, Y.; Mae, S.; Kajikawa, Y.; Matsushima, K. Nanobiotechnology as an emerging research domain from nanotechnology: A bibliometric approach. Scientometrics 2009, 80, 23–38. [Google Scholar] [CrossRef]
- Naito, O.; Iwami, S.; Mori, J.; Kajikawa, Y.; Sato, Y.; Kudoh, S.; Ikeuchi, K. Actual State of the Robotic Study Changed by the Implementation in the Real World. J. Robot. Soc. Jpn. 2013, 31, 804–815. [Google Scholar] [CrossRef]
- Goeldner, M.; Herstatt, C.; Tietze, F. The emergence of care robotics—A patent and publication analysis. Technol. Forecast. Soc. Chang. 2015, 92, 115–131. [Google Scholar] [CrossRef]
- Ittipanuvat, V.; Fujita, K.; Sakata, I.; Kajikawa, Y. Finding linkage between technology and social issue: A Literature Based Discovery approach. J. Eng. Technol. Manag. 2014, 32, 160–184. [Google Scholar] [CrossRef]
- Mejia, C.; Kajikawa, Y. The field of social robotics as means of technology selection to address country specific social issues. In Proceedings of the 2016 Portland International Conference on Management of Engineering and Technology (PICMET), Honolulu, HI, USA, 4–8 September 2016; pp. 2913–2921. [Google Scholar]
- Small, H. Co-citation in the Scientific Literature: A New Measure of the Relationship between Two Documents. J. Am. Soc. Inf. Sci. 1973, 24, 265–269. [Google Scholar] [CrossRef]
- Kessler, M. An experimental study of bibliographic coupling between technical papers (Corresp.). IEEE Trans. Inf. Theory 1963, 9, 49–51. [Google Scholar] [CrossRef]
- Klavans, R.; Boyack, K.W. Which Type of Citation Analysis Generates the Most Accurate Taxonomy of Scientific and Technical Knowledge? J. Assoc. Inf. Sci. Technol. 2017, 68, 984–998. [Google Scholar] [CrossRef]
- Shibata, N.; Kajikawa, Y.; Takeda, Y.; Matsushima, K. Detecting emerging research fronts based on topological measures in citation networks of scientific publications. Technovation 2008, 28, 758–775. [Google Scholar] [CrossRef]
- Clauset, A.; Moore, C.; Newman, M.E.J. Hierarchical structure and the prediction of missing links in networks. Nature 2008, 453, 98–101. [Google Scholar] [CrossRef] [PubMed]
- Adai, A.T.; Date, S.V.; Wieland, S.; Marcotte, E.M. LGL: Creating a map of protein function with an algorithm for visualizing very large biological networks. J. Mol. Biol. 2004, 340, 179–190. [Google Scholar] [CrossRef] [PubMed]
- Thiring, M. Design of robot slaves for creative society. Cybernetica 1970, 13, 55. [Google Scholar]
- Dautenhahn, K. Getting to know each other—Artificial social intelligence for autonomous robots. Robot. Auton. Syst. 1995, 16, 333–356. [Google Scholar] [CrossRef]
- Fraley, N.E., Jr. Prejudice, segregation and immigration laws—Integration of the robot into the laboratory society. J. Automat. Chem. 1994, 16, 139–141. [Google Scholar] [CrossRef] [PubMed]
- Bruce, V. What the human face tells the human mind: Some challenges for the robot-human interface. Adv. Robot. 1993, 8, 341–355. [Google Scholar] [CrossRef]
- Mataric, M.J. Designing and understanding adaptive group behavior. Adapt. Behav. 1995, 4, 51–80. [Google Scholar] [CrossRef]
- Bühler, C.; Hoelper, R.; Hoyer, H.; Humann, W. Autonomous robot technology for advanced wheelchair and robotic aids for people with disabilities. Robot. Auton. Syst. 1995, 14, 213–222. [Google Scholar] [CrossRef]
- Kanda, T.; Hirano, T.; Eaton, D.; Ishiguro, H. Interactive Robots as Social Partners and Peer Tutors for Children: A Field Trial. Hum. Comput. Interact. 2004, 19, 61–84. [Google Scholar] [CrossRef]
- Scassellati, B.; Admoni, H.; Matarić, M. Robots for Use in Autism Research. Annu. Rev. Biomed. Eng. 2012. [Google Scholar] [CrossRef] [PubMed]
- Bonabeau, E.; Dorigo, M.; Theraulaz, G. Inspiration for optimization from social insect behaviour. Nature 2000. [Google Scholar] [CrossRef] [PubMed]
- Bailenson, J.N.; Yee, N.; Brave, S.; Merget, D.; Koslow, D. Virtual interpersonal touch: Expressing and recognizing emotions through haptic devices. Hum. Comput. Interact. 2007. [Google Scholar] [CrossRef]
- Haber, G.P.; White, W.M.; Crouzet, S.; White, M.A.; Forest, S.; Autorino, R.; Kaouk, J.H. Robotic versus laparoscopic partial nephrectomy: Single-surgeon matched cohort study of 150 patients. Urology 2010. [Google Scholar] [CrossRef] [PubMed]
- Fasola, J.; Mataric, M.J. Using Socially Assistive Human-Robot Interaction to Motivate Physical Exercise for Older Adults. Proc. IEEE 2012, 100, 2512–2526. [Google Scholar] [CrossRef]
- Casper, J.; Murphy, R.R. Human-robot interactions during the robot-assisted urban search and rescue response at the World Trade Center. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2003. [Google Scholar] [CrossRef] [PubMed]
- Leite, I.; Martinho, C.; Paiva, A. Social Robots for Long-Term Interaction: A Survey. Int. J. Soc. Robot. 2013, 5, 291–308. [Google Scholar] [CrossRef]
- Sabanovic, S. Socializing co-robots: Incorporating users and situated interaction in the design of collaborative robots. In Proceedings of the 2014 International Conference on Collaboration Technologies and Systems (CTS), Minneapolis, MN, USA, 19–23 May 2014; pp. 113–114. [Google Scholar]
- Tsarouchi, P.; Makris, S.; Chryssolouris, G. Human—Robot interaction review and challenges on task planning and programming. Int. J. Comput. Integr. Manuf. 2016, 29, 916–931. [Google Scholar] [CrossRef]
- Mori, M.; MacDorman, K. The uncanny valley. Energy 1970. [Google Scholar] [CrossRef]
- Duffy, B.R. Anthropomorphism and the social robot. Robot. Auton. Syst. 2003, 42, 177–190. [Google Scholar] [CrossRef]
- Kim, Y.; Baylor, A.L. Research-Based Design of Pedagogical Agent Roles: A Review, Progress, and Recommendations. Int. J. Artif. Intell. Educ. 2016, 26, 160–169. [Google Scholar] [CrossRef]
- Mathur, M.B.; Reichling, D.B. Navigating a social world with robot partners: A quantitative cartography of the Uncanny Valley. Cognition 2016, 146, 22–32. [Google Scholar] [CrossRef] [PubMed]
- Diehl, J.J.; Schmitt, L.M.; Villano, M.; Crowell, C.R. The clinical use of robots for individuals with Autism Spectrum Disorders: A critical review. Res. Autism Spectr. Disord. 2012, 6, 249–262. [Google Scholar] [CrossRef] [PubMed]
- Meltzoff, A.N.; Kuhl, P.K.; Movellan, J. Foundations for a new science of learning. Science 2009, 325, 284–288. [Google Scholar] [CrossRef] [PubMed]
- Cronin, B.; Overfelt, K. The Scholars Courtesy—A Survey of Acknowledgment Behavior. J. Doc. 1994, 50, 165–196. [Google Scholar] [CrossRef]
- Rohlfing, K.J.; Wrede, B.; Vollmer, A.-L.; Oudeyer, P.-Y. An Alternative to Mapping a Word onto a Concept in Language Acquisition: Pragmatic Frames. Front. Psychol. 2016, 7, 470. [Google Scholar] [CrossRef] [PubMed]
- Brambilla, M.; Ferrante, E.; Birattari, M.; Dorigo, M. Swarm robotics: A review from the swarm engineering perspective. SWARM Intell. 2013, 7, 1–41. [Google Scholar] [CrossRef]
- Halloy, J.; Sempo, G.; Caprari, G.; Rivault, C.; Asadpour, M.; Tache, F.; Said, I.; Durier, V.; Canonge, S.; Ame, J.M.; et al. Social integration of robots into groups of cockroaches to control self-organized choices. Science 2007, 318, 1155–1158. [Google Scholar] [CrossRef] [PubMed]
- McColl, D.; Hong, A.; Hatakeyama, N.; Nejat, G.; Benhabib, B. A Survey of Autonomous Human Affect Detection Methods for Social Robots Engaged in Natural HRI. J. Intell. Robot. Syst. 2016, 82, 101–133. [Google Scholar] [CrossRef]
- Yohanan, S.; MacLean, K.E. The Role of Affective Touch in Human-Robot Interaction: Human Intent and Expectations in Touching the Haptic Creature. Int. J. Soc. Robot. 2012, 4, 163–180. [Google Scholar] [CrossRef]
- Adalgeirsson, S.O.; Breazeal, C. MeBot. In Proceedings of the 5th ACM/IEEE International Conference on Human-Robot Interaction—HRI ’10, Nara, Japan, 2–5 March 2010; p. 15. [Google Scholar]
- Fiore, S.M.; Wiltshire, T.J.; Lobato, E.J.C.; Jentsch, F.G.; Huang, W.H.; Axelrod, B. Toward understanding social cues and signals in human-robot interaction: Effects of robot gaze and proxemic behavior. Front. Psychol. 2013, 4. [Google Scholar] [CrossRef] [PubMed]
- Cortés, X.; Serratosa, F. Cooperative pose estimation of a fleet of robots based on interactive points alignment. Expert Syst. Appl. 2016, 45, 150–160. [Google Scholar] [CrossRef]
- Dindo, H.; Donnarumma, F.; Chersi, F.; Pezzulo, G. The intentional stance as structure learning: A computational perspective on mindreading. Biol. Cybern. 2015, 109, 453–467. [Google Scholar] [CrossRef] [PubMed]
- Mejia, C.; Kajikawa, Y. Assessing the sentiment of social expectations of robotic technologies. In Proceedings of the 2017 Portland International Conference on Management of Engineering and Technology (PICMET), Portland, OR, USA, 9–13 July 2017. [Google Scholar]
- International Federation of Robotics. Executive Summary. World Robotics 2016 Service Robotics. Available online: https://ifr.org/downloads/press/02_2016/Executive_Summary_Service_Robots_2016.pdf/ (accessed on 26 August 2017).
- Argall, B.D.; Chernova, S.; Veloso, M.; Browning, B. A survey of robot learning from demonstration. Robot. Auton. Syst. 2009, 57, 469–483. [Google Scholar] [CrossRef]
- Yim, M.; Shen, W.-M.; Salemi, B.; Rus, D.; Moll, M.; Lipson, H.; Klavins, E.; Chirikjian, G.S. Modular self-reconfigurable robot systems—Challenges and opportunities for the future. IEEE Robot. Autom. Mag. 2007, 14, 43–52. [Google Scholar] [CrossRef]
- Brooks, R.A. Intelligence without representation. Artif. Intell. 1991, 47, 139–159. [Google Scholar] [CrossRef]
- Charalampous, K.; Kostavelis, I.; Gasteratos, A. Recent trends in social aware robot navigation: A survey. Robot. Auton. Syst. 2017, 93, 85–104. [Google Scholar] [CrossRef]
- Hall, E. The Hidden Dimension: Man’s Use of Space in Public and in Private; Bodley Head: London, UK, 1969; ISBN 0385084765. [Google Scholar]
- Picard, R.W. Affective Computing. Affect. Comput. 1997. [Google Scholar] [CrossRef]
- Broekens, J.; Heerink, M.; Rosendal, H. Assistive social robots in elderly care: A review Assistive social robots. Gerontechnology 2009. [Google Scholar] [CrossRef]
- Robins, B.; Dautenhahn, K.; Te Boekhorst, R.; Billard, A. Robotic assistants in therapy and education of children with autism: Can a small humanoid robot help encourage social interaction skills? Univers. Access Inf. Soc. 2005. [Google Scholar] [CrossRef]
- Dautenhahn, K.; Werry, I. Towards interactive robots in autism therapy: Background, motivation and challenges. Pragmat. Cogn. 2004. [Google Scholar] [CrossRef]
- Nass, C.; Moon, Y. Machines and Mindlessness: Social Responses to Computers. J. Soc. Issues 2000. [Google Scholar] [CrossRef]
- Bonabeau, E.; Dorigo, M.; Theraulaz, G. Swarm Intelligence: From Natural to Artificial Systems; Oxford University Press: Oxford, UK, 1999; ISBN 9780195131598. [Google Scholar]
- Šabanovic, S. Robots in society, society in robots: Mutual shaping of society and technology as a framework for social robot design. Int. J. Soc. Robot. 2010, 2, 439–450. [Google Scholar] [CrossRef]
- Bartneck, C.; Kulić, D.; Croft, E.; Zoghbi, S. Measurement instruments for the anthropomorphism, animacy, likeability, perceived intelligence, and perceived safety of robots. Int. J. Soc. Robot. 2009, 1, 71–81. [Google Scholar] [CrossRef]
- Faber, M.; Bützler, J.; Schlick, C.M. Human-robot Cooperation in Future Production Systems: Analysis of Requirements for Designing an Ergonomic Work System. Procedia Manuf. 2015, 3, 510–517. [Google Scholar] [CrossRef]
- Haddadin, S.; Albu-Schäffer, A.; Hirzinger, G. Requirements for Safe Robots: Measurements, Analysis and New Insights. Int. J. Robot. Res. 2009, 28, 1507–1527. [Google Scholar] [CrossRef] [Green Version]
- Makris, S.; Karagiannis, P.; Koukas, S.; Matthaiakis, A.-S. Augmented reality system for operator support in human–robot collaborative assembly. CIRP Ann. 2016, 65, 61–64. [Google Scholar] [CrossRef]
- Trautman, P.; Ma, J.; Murray, R.M.; Krause, A. Robot navigation in dense human crowds: Statistical models and experimental studies of human-robot cooperation. Int. J. Robot. Res. 2015, 34, 335–356. [Google Scholar] [CrossRef]
- Salton, G.; Buckley, C. Term-weighting approaches in automatic text retrieval. Inf. Process. Manag. 1988, 24, 513–523. [Google Scholar] [CrossRef]
- Singhal, A. Modern Information Retrieval: A Brief Overview. Bull. IEEE Comput. Soc. Technol. Comm. Data Eng. 2001. [Google Scholar]
- Broadbent, E.; Stafford, R.; MacDonald, B. Acceptance of healthcare robots for the older population: Review and future directions. Int. J. Soc. Robot. 2009, 1, 319–330. [Google Scholar] [CrossRef]
- Breazeal, C. Emotion and sociable humanoid robots. Int. J. Hum. Comput. Stud. 2003, 59, 119–155. [Google Scholar] [CrossRef]
- Sidner, C.L.; Lee, C.; Kidd, C.D.; Lesh, N.; Rich, C. Explorations in engagement for humans and robots. Artif. Intell. 2005. [Google Scholar] [CrossRef]
- Allen, C.; Varner, G.; Zinser, J. Prolegomena to any future artificial moral agent. J. Exp. Theor. Artif. Intell. 2000. [Google Scholar] [CrossRef]
- Pineau, J.; Montemerlo, M.; Pollack, M.; Roy, N.; Thrun, S. Towards robotic assistants in nursing homes: Challenges and results. Robot. Auton. Syst. 2003, 42, 271–281. [Google Scholar] [CrossRef]
- Hoffman, G.; Breazeal, C. Cost-based anticipatory action selection for human-robot fluency. IEEE Trans. Robot. 2007, 23, 952–961. [Google Scholar] [CrossRef]
- Shinozawa, K.; Naya, F.; Yamato, J.; Kogure, K. Differences in effect of robot and screen agent recommendations on human decision-making. Int. J. Hum. Comput. Stud. 2005. [Google Scholar] [CrossRef]
- Sparrow, R. Predators or plowshares? Arms control of robotic weapons. IEEE Technol. Soc. Mag. 2009. [Google Scholar] [CrossRef]
- Bringsjord, S.; Arkoudas, K.; Bello, P. Toward a general logicist methodology for engineering ethically correct robots. IEEE Intell. Syst. 2006. [Google Scholar] [CrossRef]
- Pulasinghe, K.; Watanabe, K.; Izumi, K.; Kiguchi, K. Modular Fuzzy-Neuro Controller Driven by Spoken Language Commands. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2004. [Google Scholar] [CrossRef]
- Jayawardena, C.; Watanabe, K.; Izumi, K. Controlling a robot manipulator with fuzzy voice commands using a probabilistic neural network. Neural Comput. Appl. 2007. [Google Scholar] [CrossRef]
- Chan, W.P.; Parker, C.A.C.; Van der Loos, H.F.M.; Croft, E.A. A human-inspired object handover controller. Int. J. Robot. Res. 2013. [Google Scholar] [CrossRef]
- Kamei, K.; Nishio, S.; Hagita, N.; Sato, M. Cloud networked robotics. IEEE Netw. 2012. [Google Scholar] [CrossRef]
- Chang, C.W.; Lee, J.H.; Wang, C.Y.; Chen, G.D. Improving the authentic learning experience by integrating robots into the mixed-reality environment. Comput. Educ. 2010. [Google Scholar] [CrossRef]
- Dario, P.; Guglielmelli, E.; Laschi, C. Humanoids and personal robots: Design and experiments. J. Robot. Syst. 2001, 18, 673–690. [Google Scholar] [CrossRef]
Figure 1.
Data collection and methodology described in this article. (a) Data retrieval; (b) A citation network is created based on the references of the articles; (c) The largest connected component is extracted; (d) Clusters are obtained from the network.
Figure 1.
Data collection and methodology described in this article. (a) Data retrieval; (b) A citation network is created based on the references of the articles; (c) The largest connected component is extracted; (d) Clusters are obtained from the network.

Figure 2.
Yearly trends of publications on robotics and social robotics.

Figure 3.
Trends in publications of social robotics. (a) By number of articles; (b) proportion in relation to all-robotics research.
Figure 3.
Trends in publications of social robotics. (a) By number of articles; (b) proportion in relation to all-robotics research.

Figure 4.
Citation networks of (a) robotics research and (b) social robotics research.

Figure 5.
Yearly trends in publishing per cluster. Clusters 1–4: robots as social partners, human factors and ergonomics in human robot interaction, robotics for child development and swarm robotics.
Figure 5.
Yearly trends in publishing per cluster. Clusters 1–4: robots as social partners, human factors and ergonomics in human robot interaction, robotics for child development and swarm robotics.

Figure 6.
Yearly trends in publishing per cluster. Clusters 5–8: emotion detection, assessment of robotic surgery, robots for the elderly and telepresence and human-robot interaction in rescue robots.
Figure 6.
Yearly trends in publishing per cluster. Clusters 5–8: emotion detection, assessment of robotic surgery, robots for the elderly and telepresence and human-robot interaction in rescue robots.

Table 1.
Clusters in the robotics network.
| # | Cluster | Sub-Cluster | Articles | % |
|---|---|---|---|---|
| 1 | Automation and control systems | 1.1 Path planning/Obstacle avoidance | 14,885 | 10.4% |
| 1.2 Visual servoing | 10,884 | 7.6% | ||
| 1.3 Robot manipulators | 9020 | 6.3% | ||
| 2 | Robotic locomotion | 2.1 Walking robots | 11,431 | 8.0% |
| 2.2 Robot learning | 10,020 | 7.0% | ||
| 2.3 Rehabilitation Robotics | 8588 | 6.0% | ||
| 3 | Autonomous robots | 3.1 Simultaneous localization and mapping | 8220 | 5.8% |
| 3.2 Human-Robot Interaction | 6481 | 4.5% | ||
| 3.3 Tactile sensing and robotic grasping | 6368 | 4.5% | ||
| 4 | Robotic surgery | 4.1 Robotic assisted surgery | 5061 | 3.5% |
| 4.2 Robot assisted radical prostatectomy | 3859 | 2.7% | ||
| 4.3 Transoral robotic surgery | 3585 | 2.5% |
Table 2.
Clusters in the social robotics network.
| # | Cluster | Articles | % |
|---|---|---|---|
| 1 | Robots as social partners | 775 | 23.2% |
| 2 | Human factors and ergonomics in human robot interaction | 665 | 19.9% |
| 3 | Robotics for child development | 628 | 18.8% |
| 4 | Swarm robotics | 340 | 10.2% |
| 5 | Emotion detection | 198 | 5.9% |
| 6 | Assessment of robotic surgery | 169 | 5.1% |
| 7 | Robots for the elderly, and telepresence | 129 | 3.9% |
| 8 | Human-robot interaction in rescue robotics | 88 | 2.6% |
Table 3.
Bibliometric taxonomy of social robotics. Most frequent countries, institutions, publishers and authors are shown.
Table 3.
Bibliometric taxonomy of social robotics. Most frequent countries, institutions, publishers and authors are shown.
| # | Cluster Label | Country | Institution | Journals/Conferences | Authors |
|---|---|---|---|---|---|
| 1 | Robots as social partners 2013.1; [29] * | USA Japan UK Germany The Netherlands | Osaka Univ. Univ. Twente Advanced Telecom.-Research Inst. Univ. Washington | IJSR** LNAI ACM/IEEE HRI IROS | Kanda, T. Ishiguro, H. Hagita, N. Shiomi, M. Glas, D.F. |
| 2 | Human factors and ergonomics in human robot interaction 2012.1; [5] | USA Japan UK Germany France | Univ. Bielefeld Univ. Hertfordshire Osaka Univ. MIT Waseda Univ. | LNAI ACM/IEEE HRI IJSR IEEE ROMAN | Ishiguro, H. Dautenhahn, K. Breazeal, C. Eyssel, F. Wrede, B. |
| 3 | Robotics for children development 2011.7; [30] | USA UK Japan France Italy | Univ. Hertfordshire Vrije Univ. Brussel Univ. Bielefeld Osaka Univ. Univ. Babes Bolyai | IJSR LNAI IEEE TAMD Advanced Robotics | Dautenhahn, K. Vanderborght, B. Robins, B. Nehaniv, C.L. Scassellati, B. |
| 4 | Swarm robotics 2010.4; [31] | USA Belgium Italy UK Switzerland | Ecole Polytech Lausanne Univ. Libre Bruxelles NYU Georgia Inst. Technol. Univ. Lausanne | LNCS LNAI Adaptive Behavior Bioinspiration & Biomimetics | Dorigo, M. Porfiri, M. Schmickl, T. Takanishi, A. Mondada, F. |
| 5 | Emotion detection 2012.6; [32] | USA Japan The Netherlands Spain UK | Univ. Carlos III Madrid Osaka Univ. Univ. Toronto Tech. Univ. Munich Eindhoven Univ. Technol. | ACM/IEEE HRI LNAI LNCS IJSR | Salichs, M.A. Nejat, G. Alonso-Martin, F. Ishiguro, H. Malfaz, M. |
| 6 | Assessment of robotic surgery 2013.1; [33] | USA UK Italy South Korea France | Roswell Park Cancer Inst. Univ. N. Carolina Cleveland Clinic Univ. Michigan Memorial Sloan Kettering-Cancer Center | Journal of Endourology BJU International European Urology Urology The Journal of Urology | Guru, K.A. Autorino, R. Kaouk, J.H. Mottrie, A. Haber, G.P. |
| 7 | Robots for the elderly and telepresence 2013.0; [34] | USA Japan Germany UK Sweden | Ilmenau Univ. Technol. Univ. So Calif Univ. Orebro Georgia Inst. Technol. Saitama Univ. | ACM/IEEE HRI IJSR LNAI IROS | Gross, HM Mataric, M.J. Mueller, S. Murphy, R.R. Loutfi, A. |
| 8 | Human-robot interaction in rescue robotics 2011.7; [35] | USA Japan Italy France UK | MIT Univ. S. Florida Univ. Central Florida Consiglio Nazionale delle-Ricerche Kyoto Univ. | Advanced Robotics LNAI ACM/IEEE HRI IEEE Humanoids | Fiore, S.M. Wiltshire, T.J. Pandey, A.K. Pezzulo, G. Nakadai, K. |
* Average publication year; article with most citations. ** ACM/IEEE HRI: ACM/IEEE International Conference on Human-Robot Interaction, IEEE ROMAN: IEEE Robot and Human Interactive Communication, IEEE TAMD: IEEE Transactions on Autonomous Mental Development, IEEE Humanoids: IEEE RAS International Conference on Humanoid Robots, IJSR: International Journal of Social Robotics, IROS: IEEE International Conference on Intelligent Robots and Systems, LNAI: Lecture Notes in Artificial Intelligence, LNCS: Lecture Notes in Computer Science.
Table 4.
Most frequent journals and conferences in social robotics.
| Journal/Conference | % of Articles |
|---|---|
| Lecture notes on artificial intelligence | 6.1% |
| International journal of social robotics | 5.9% |
| ACM/IEEE international conference on human-robot interaction | 3.7% |
| Lecture notes on computer science | 2.8% |
| IEEE robot and human interactive communication | 2.5% |
Table 5.
Participation of social robotics articles in the sub-clusters of the robotics network.
| # | Cluster | Sub-Cluster | Social Robotics Articles | % |
|---|---|---|---|---|
| 1 | Automation and control systems | 1.1 Path planning/obstacle avoidance | 175 | 5.2% |
| 1.2 Visual servoing | 1 | 0.0% | ||
| 1.3 Robot manipulators | 4 | 0.1% | ||
| 2 | Robotic locomotion | 2.1 Walking robots | 16 | 0.5% |
| 2.2 Robot learning | 539 | 16.2% | ||
| 2.3 Rehabilitation robotics | 40 | 1.2% | ||
| 3 | Autonomous robots | 3.1 Simultaneous localization and mapping | 21 | 0.6% |
| 3.2 Human-robot interaction | 1959 | 58.8% | ||
| 3.3 Tactile sensing and robotic grasping | 42 | 1.3% | ||
| 4 | Robotic surgery | 4.1 Robotic assisted surgery | 111 | 3.3% |
| 4.2 Robot assisted radical prostatectomy | 76 | 2.3% | ||
| 4.3 Transoral robotic surgery | 37 | 1.1% |
Table 6.
References and citations from social robotics to clusters in the robotics network.
| Robotics Research Clusters | References | Citations | ||
|---|---|---|---|---|
| Number | % | Number | % | |
| 1. Automation and control systems | 1554 | 14.33% | 3172 | 10.87% |
| 2. Robotic locomotion | 2893 | 26.68% | 7803 | 26.74% |
| 3. Autonomous robots | 2922 | 26.95% | 11,539 | 39.55% |
| 4. Robotic surgery | 2624 | 24.20% | 5286 | 18.12% |
Table 7.
Citations from social robotics papers to articles inside and outside robotics research.
| Source indicator | Total | Inside | Outside |
|---|---|---|---|
| References | 144,715 | 10,843 (7%) | 133,872 (93%) |
| Citations | 211,171 | 29,178 (14%) | 181,993 (86%) |
| Average | 1.45 | 2.69 | 1.36 |
Table 8.
Most cited literature from the social robotics research to outside of the network of robotics.
Table 8.
Most cited literature from the social robotics research to outside of the network of robotics.
| # | Title | Type | Author | Year | Citations |
|---|---|---|---|---|---|
| 1 | Designing Sociable Robots [6] | Book | Breazal, C. | 2002 | 199 |
| 2 | The Media Equation: How People Treat Computers, Television, and New Media Like Real People and Places [1] | Book | Reeves, B. | 1996 | 186 |
| 3 | The Uncanny Valley [39] | Article | Mori, M. | 1970 | 159 |
| 4 | The Hidden Dimension [61] | Book | Hall Edward, T. | 1966 | 110 |
| 5 | Affective Computing [62] | Book | Picard, R. | 1997 | 76 |
| 6 | Assistive social robots in elderly care: a review [63] | Article | Broekens, J. | 2009 | 75 |
| 7 | Robotic assistants in therapy and education of children with autism: can a small humanoid robot help encourage social interaction skills? [64] | Article | Robins, B. | 2005 | 74 |
| 8 | Towards interactive robots in autism therapy: Background, motivation and challenges [65] | Article | Dauthenhahn, K. | 2004 | 73 |
| 9 | Machines and Mindlessness: Social Responses to Computers [66] | Article | Nass, C. | 2000 | 73 |
| 10 | Swarm Intelligence [67] | Book | Bonabeau, E. | 1999 | 69 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Mejia, C.; Kajikawa, Y. Bibliometric Analysis of Social Robotics Research: Identifying Research Trends and Knowledgebase. Appl. Sci. 2017, 7, 1316. https://0-doi-org.brum.beds.ac.uk/10.3390/app7121316
AMA Style
Mejia C, Kajikawa Y. Bibliometric Analysis of Social Robotics Research: Identifying Research Trends and Knowledgebase. Applied Sciences. 2017; 7(12):1316. https://0-doi-org.brum.beds.ac.uk/10.3390/app7121316
Chicago/Turabian StyleMejia, Cristian, and Yuya Kajikawa. 2017. "Bibliometric Analysis of Social Robotics Research: Identifying Research Trends and Knowledgebase" Applied Sciences 7, no. 12: 1316. https://0-doi-org.brum.beds.ac.uk/10.3390/app7121316
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.