A Virtual Impedance Control Strategy for Improving the Stability and Dynamic Performance of VSC–HVDC Operation in Bidirectional Power Flow Mode


Abstract
:1. Introduction
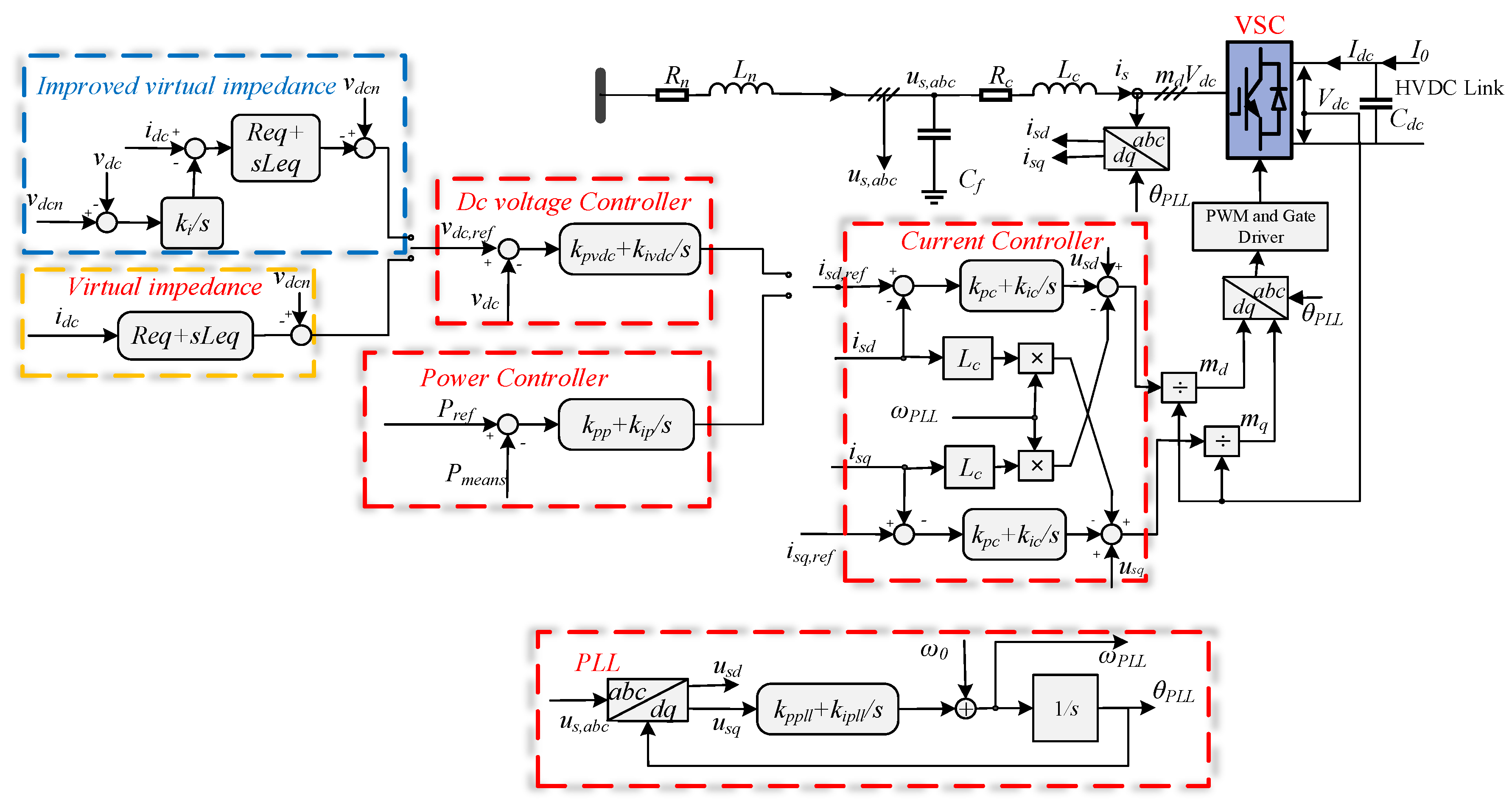
2. Improved Virtual Impedance Control Principle
3. Impedance Model of Converters with Improved Virtual Impedance Control Strategy
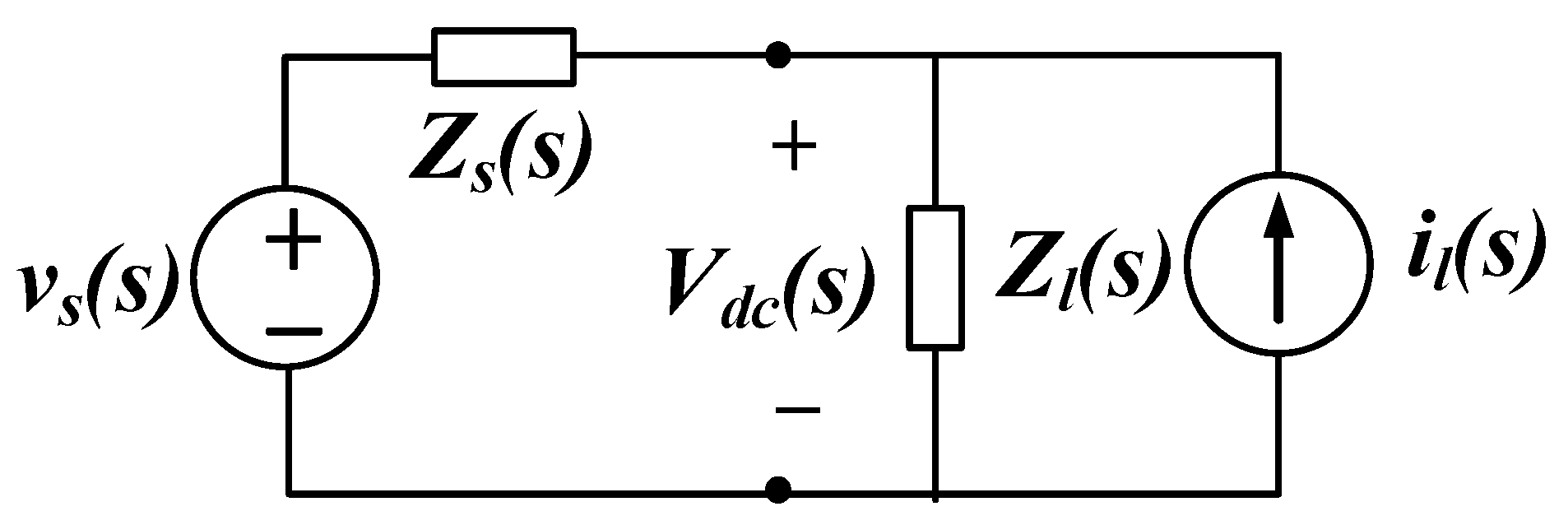
3.1. DC-Side Impedance Modeling of DC-Voltage-Controlled Converter
3.2. DC Side Impedance Modeling of the Power-Controlled Converter
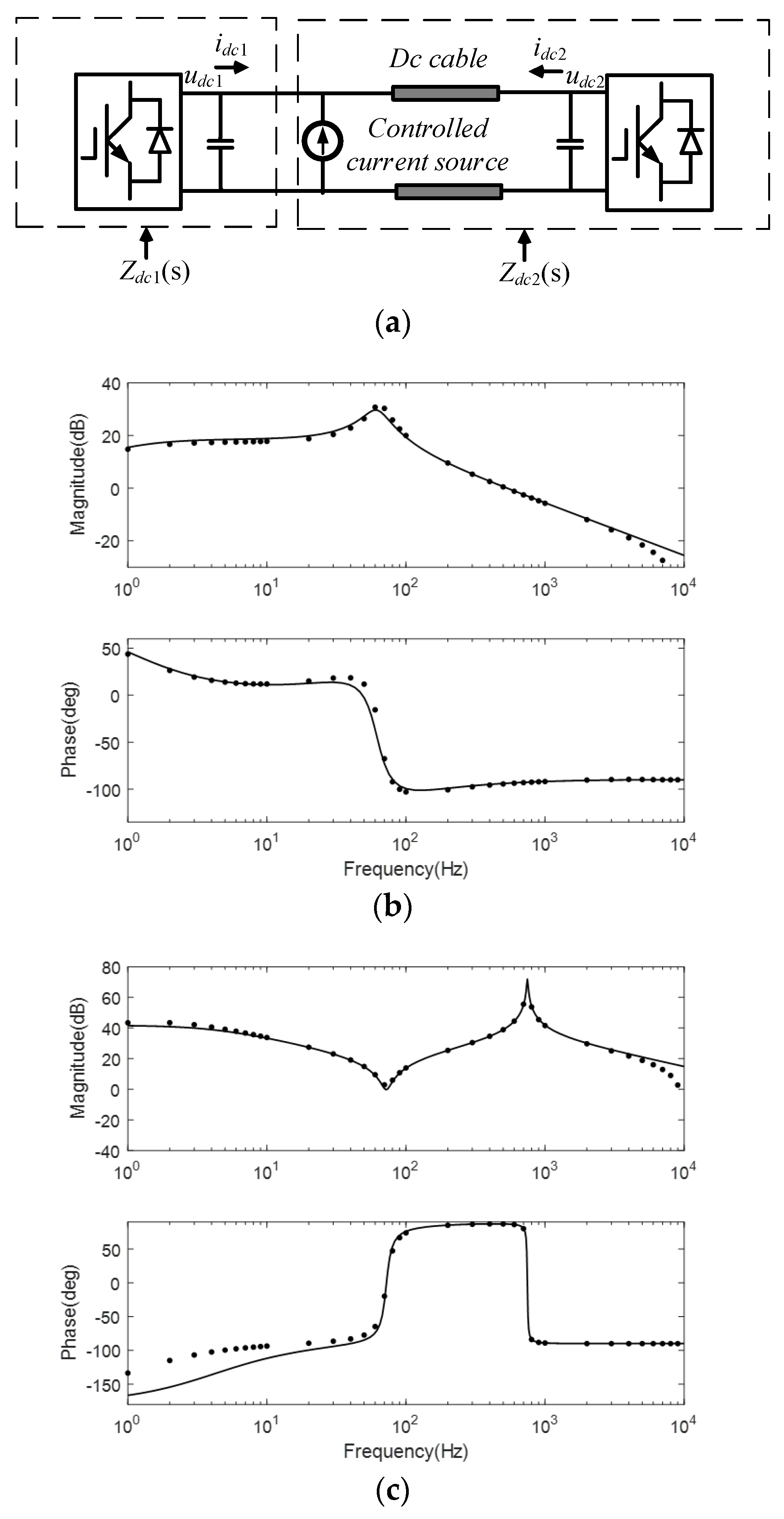
3.3. Verifying Impedance Modeling Through Perturbation Signal Testing
4. Stability Analysis of VSC–HVDC with Improved Virtual Impedance Control Strategy
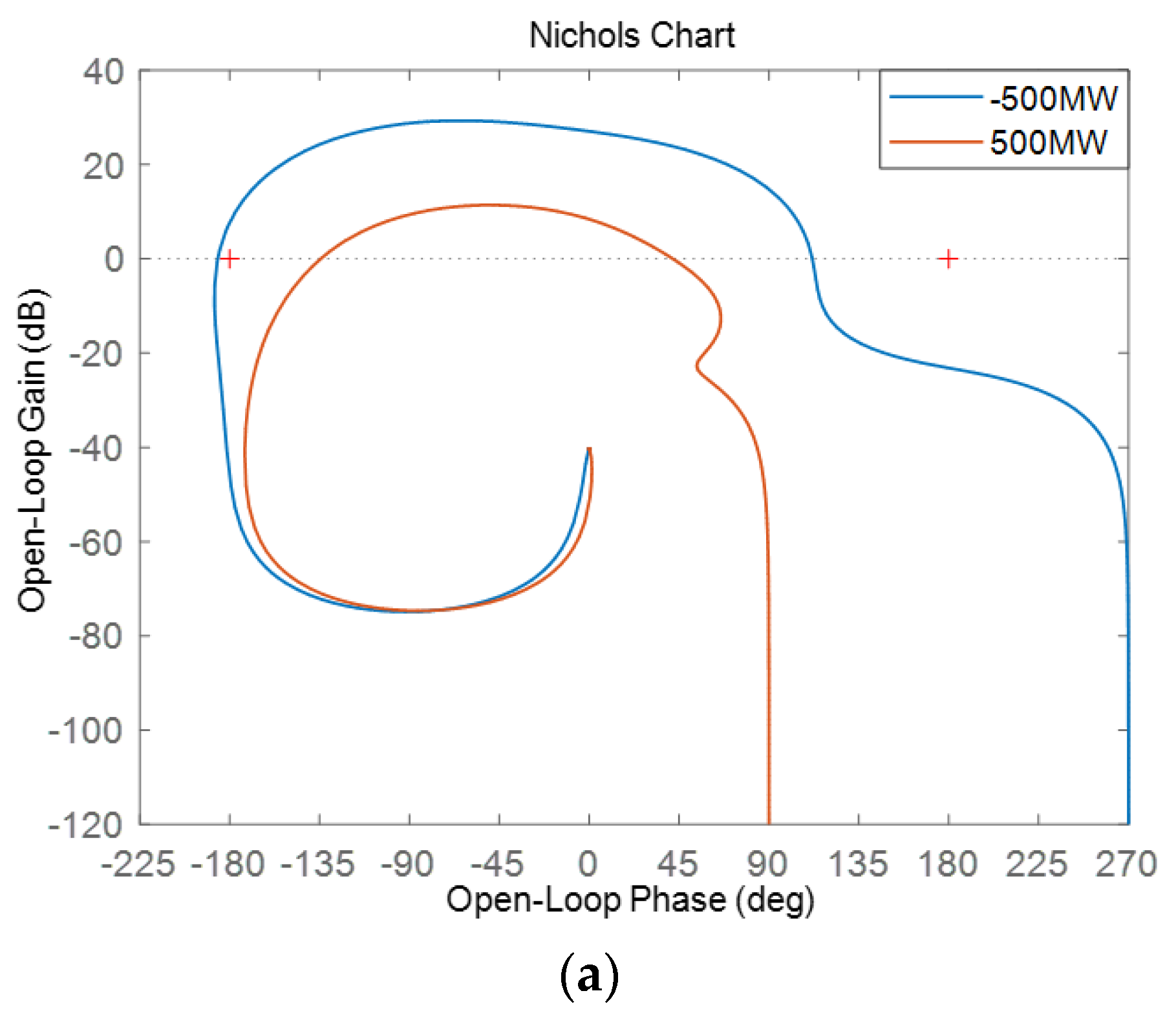
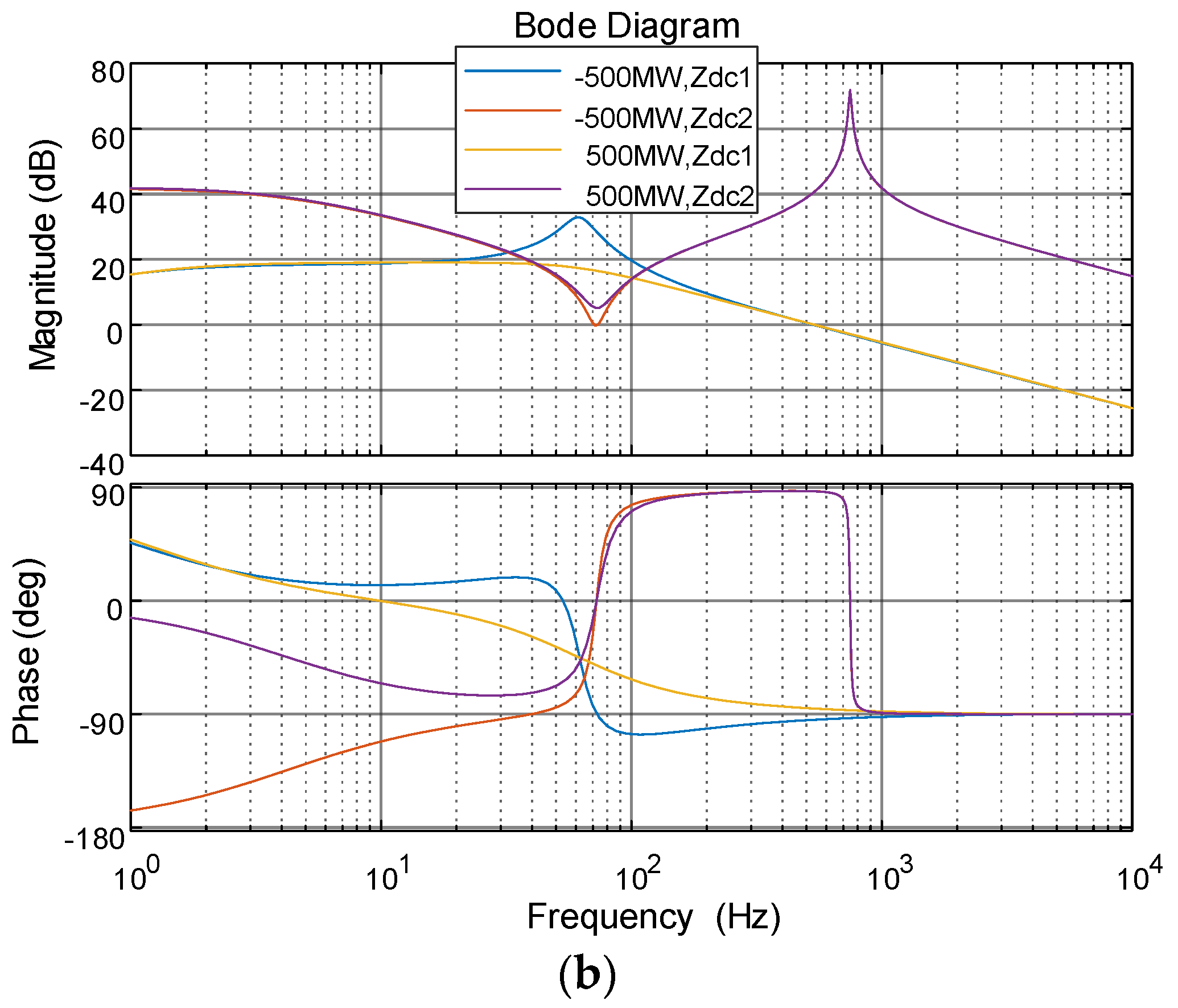
4.1. Impact of the Power Flow Direction
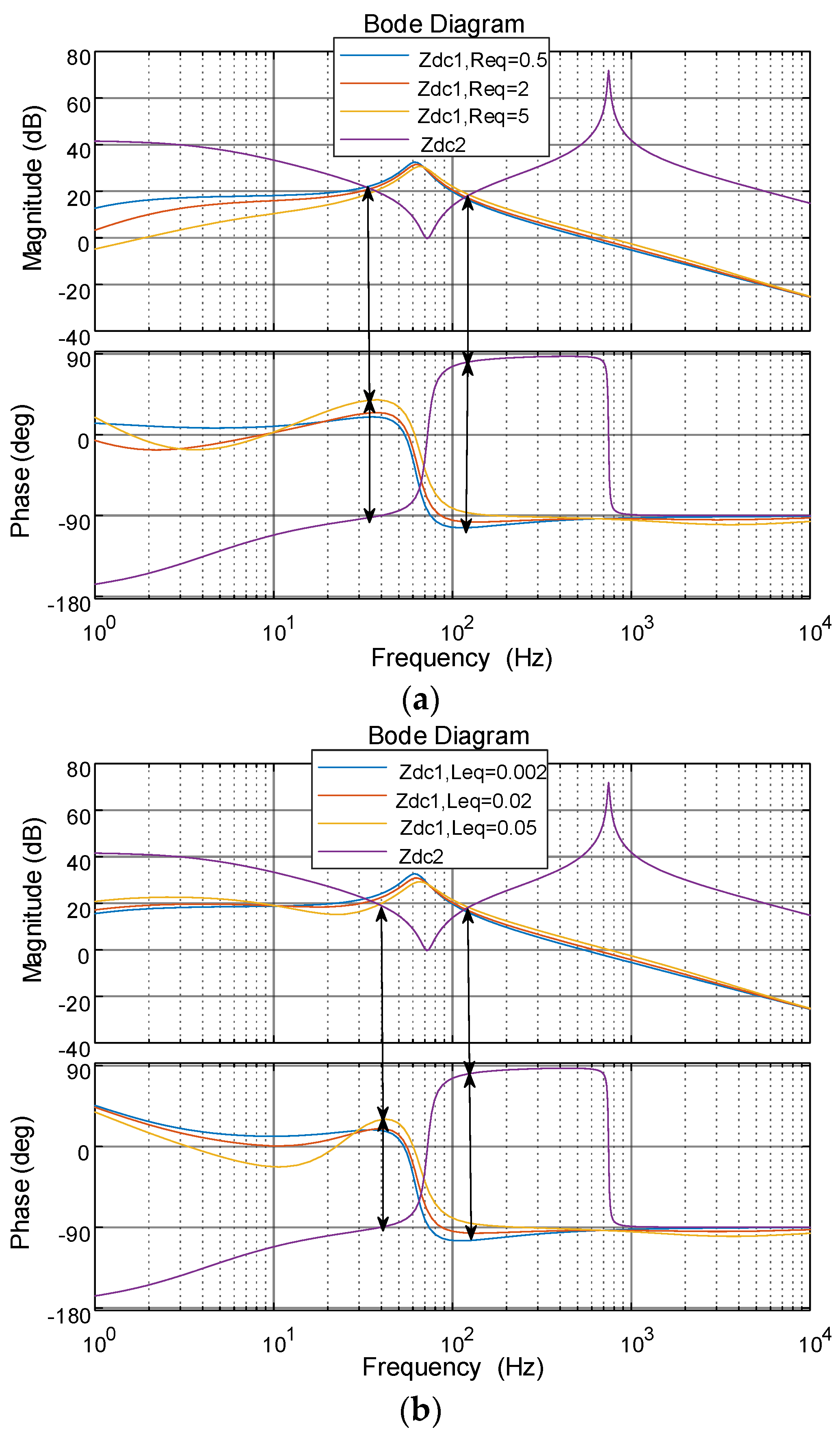
4.2. Impact of Virtual Impedance by Frequency Responses
4.3. Impact of Virtual Impedance Parameters by Nichols Plots
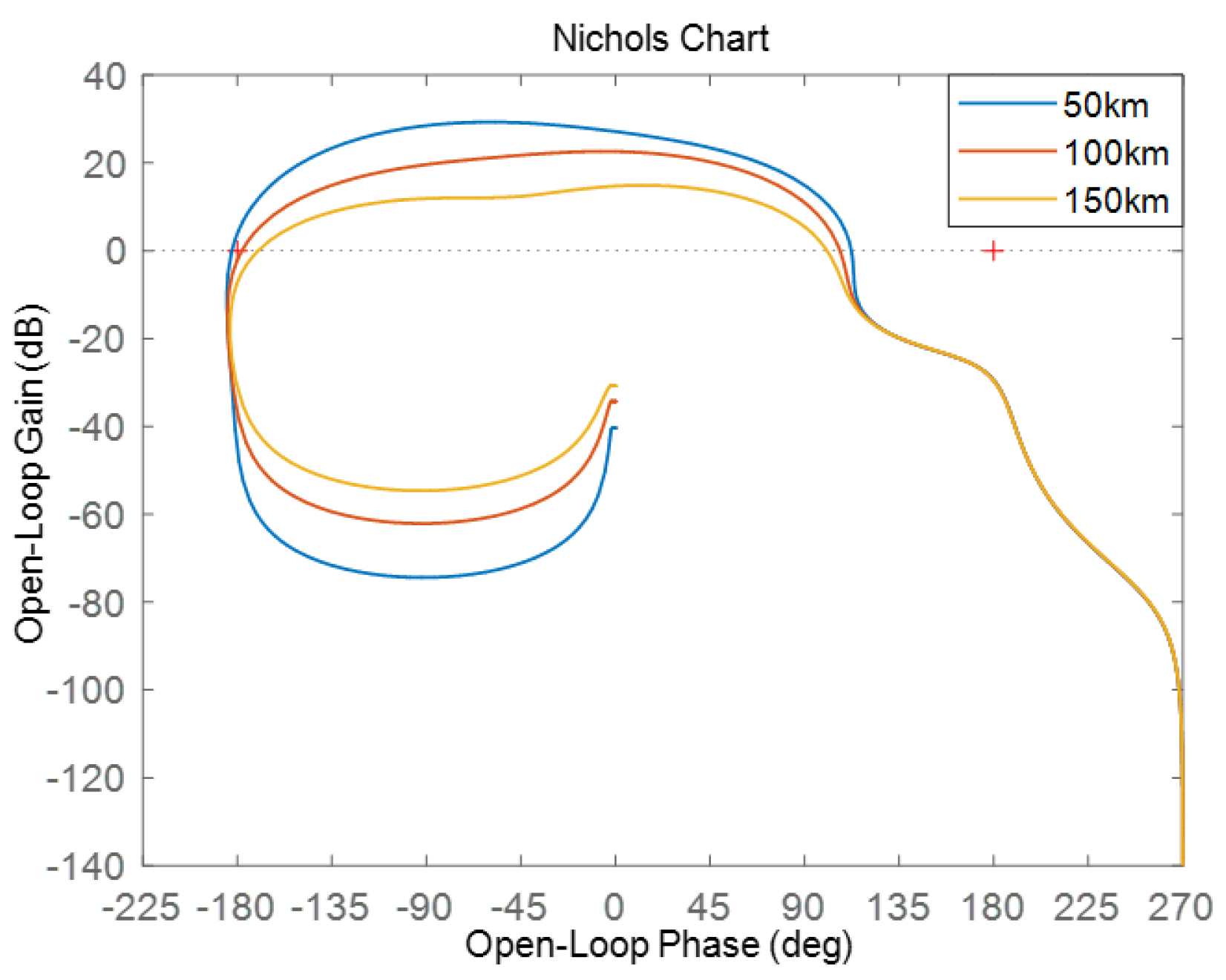
4.4. Impact of DC Cable Length
4.5. Impact of DC Side Capacity
4.6. Impact of Grid Impedance
5. Simulation Verification
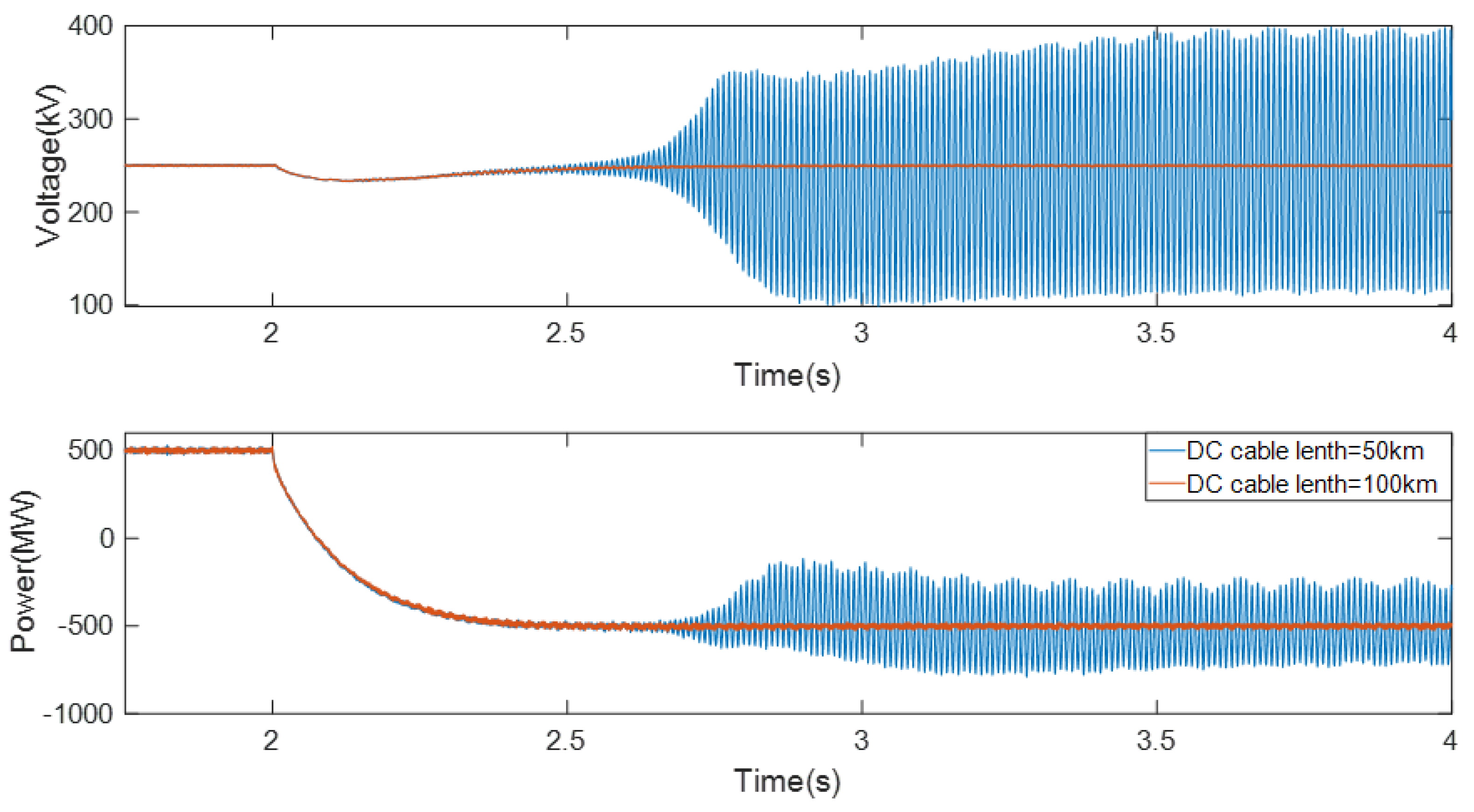
5.1. Impact of DC Cable Length
5.2. Impact of DC Side Capacity
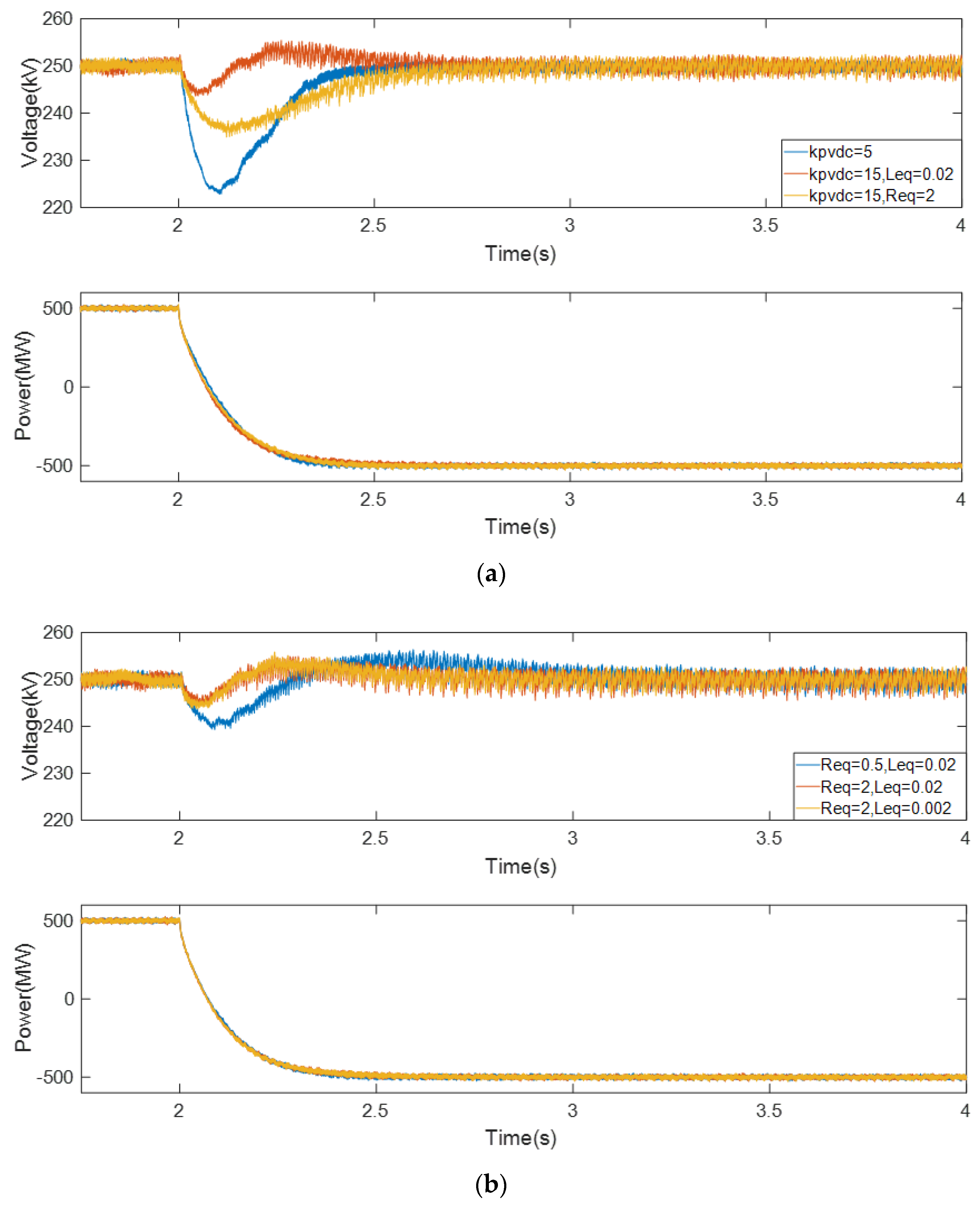
5.3. Dynamic Performance Comparison
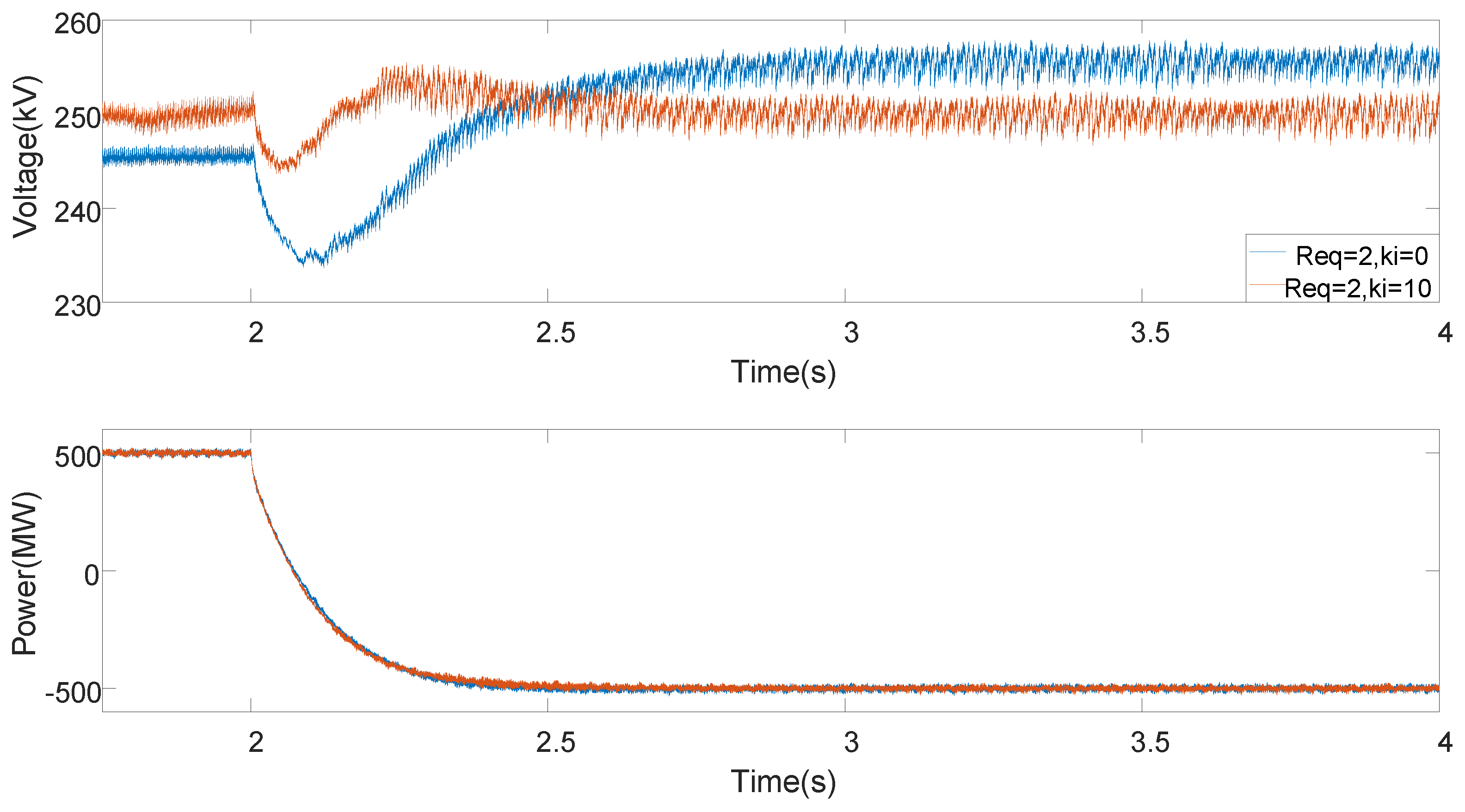
5.4. Steady State Error Elimination
5.5. Impact of Gird Impedance
6. Conclusions
- (1)
- DC-side oscillation occurs when the transmission power of the system is large. The maximum transmission power of a DC voltage-controlled converter to a power-controlled converter is less than that in the opposite transmission direction.
- (2)
- The shorter the DC cable is, the more easily the oscillation of DC voltage will occur.
- (3)
- The smaller the DC side capacity is, the more easily the oscillation of DC voltage will occur.
- (4)
- The weaker the AC grid strength is, the more easily the DC side oscillation will occur.
- (5)
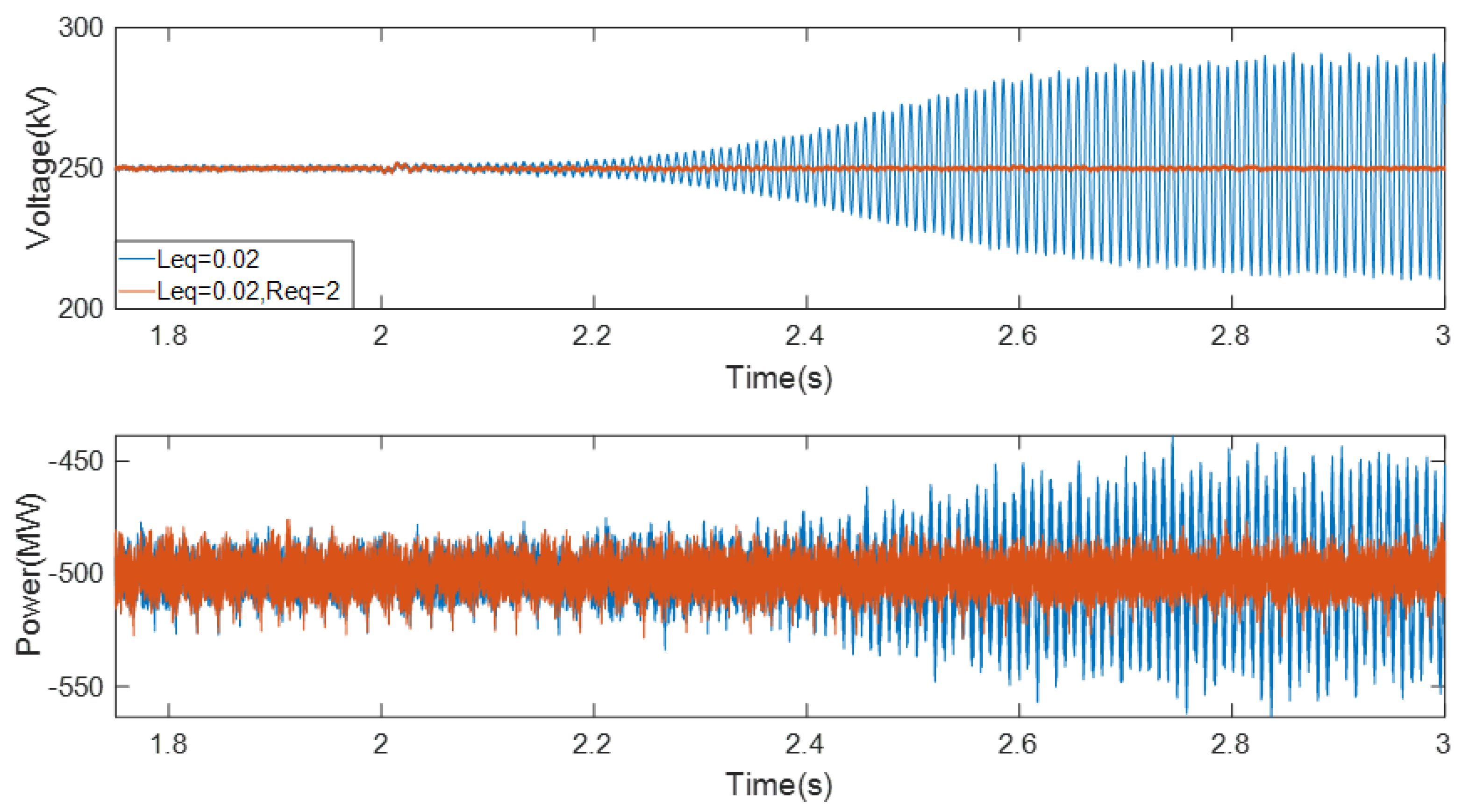
- Appropriate virtual impedance parameters can improve system stability. The phase margin of the system is insufficient to suppress DC-side oscillation when the virtual impedance parameter is small. If the virtual impedance parameters, Req or Leq, are too large, then the system will enter a new unstable state.
Author Contributions
Funding
Conflicts of Interest
References
- Flourentzou, N.; Agelidis, V.G.; Demetriades, G.D. VSC-Based HVDC Power Transmission Systems: An Overview. IEEE Trans. Power Electron. 2009, 24, 592–602. [Google Scholar] [CrossRef]
- Yang, J.; Liu, K.; Yu, Y.; Qin, L.; Le, J. Small Signal Modeling for VSC-HVDC Used in AC Grid Interconnection. Proc. CSEE 2015, 35, 2177–2184. [Google Scholar]
- Zhang, L.; Nee, H.P. Multivariable feedback design of VSC-HVDC connected to weak ac systems. In Proceedings of the IEEE Bucharest PowerTech, Bucharest, Romania, 28 June–2 July 2009; pp. 1–8. [Google Scholar]
- Kumars, R.; Arash, M.; Jose, I.C.; Alvaro, L.; Pedro, R. A Generalized Voltage Droop Strategy for Control of Multiterminal DC Grids. IEEE Trans. Ind. Appl. 2015, 51, 607–618. [Google Scholar]
- Zhang, L.; Nee, H.P.; Harnefors, L. Analysis of Stability Limitations of a VSC-HVDC Link Using Power-Synchronization Control. IEEE Trans. Power Syst. 2011, 26, 1326–1337. [Google Scholar] [CrossRef]
- Zhang, L.; Harnefors, L.; Nee, H.P. Interconnection of Two Very Weak AC Systems by VSC-HVDC Links Using Power-Synchronization Control. IEEE Trans. Power Syst. 2011, 26, 344–355. [Google Scholar] [CrossRef]
- Wen, B.; Dong, D.; Boroyevich, D.; Mattavelli, P.; Shen, Z. Impedance-Based Analysis of Grid-Synchronization Stability for Three-Phase Paralleled Converters. IEEE Trans. Power Electron. 2015, 31, 675–687. [Google Scholar] [CrossRef]
- Yuan, H.; Yuan, X.; Hu, J. Modeling of Grid-Connected VSCs for Power System Small-Signal Stability Analysis in DC-Link Voltage Control Time-scale. IEEE Trans. Power Syst. 2017, 32, 3981–3991. [Google Scholar] [CrossRef]
- Kalcon, G.O.; Adam, G.P.; Anaya-Lara, O.; Lo, S.; Uhlen, K. Small-Signal Stability Analysis of Multi-Terminal VSC-Based DC Transmission Systems. IEEE Trans. Power Syst. 2012, 27, 1818–1830. [Google Scholar] [CrossRef]
- Beerten, J.; D’Arco, S.; Suul, J.A. Identification and Small-Signal Analysis of Interaction Modes in VSC MTDC Systems. IEEE Trans. Power Deliv. 2016, 31, 888–897. [Google Scholar] [CrossRef]
- Li, Y.; Tang, G.; He, Z.; An, T.; Yang, J.; Wu, Y.; Kong, M. Damping Control Strategy research for MMC based HVDC system. Proc. CSEE 2016, 36, 5492–5503. [Google Scholar]
- Xu, L.; Fan, L.; Miao, Z. DC Impedance-Model-Based Resonance Analysis of a VSC–HVDC System. IEEE Trans. Power Deliv. 2014, 30, 1221–1230. [Google Scholar] [CrossRef]
- Amin, M.; Molinas, M.; Lyu, J.; Cai, X. Impact of Power Flow Direction on the Stability of VSC-HVDC Seen from the Impedances Nyquist Plot. IEEE Trans. Power Electron. 2016, 32, 8204–8217. [Google Scholar] [CrossRef]
- Middlebrook, R.D. Input Filter considerations In Design and Application of Switching Regulators. In Proceedings of the IEEE Power Electronics Specialists Conference, Cleveland, OH, USA, 8 June 1976; pp. 366–382. [Google Scholar]
- Sun, J. Impedance-Based Stability Criterion for Grid-Connected Inverters. IEEE Trans. Power Electron. 2011, 26, 3075–3078. [Google Scholar] [CrossRef]
- Pinares, G.; Bongiorno, M. Modeling and Analysis of VSC-Based HVDC Systems for DC Network Stability Studies. IEEE Trans. Power Deliv. 2015, 31, 848–856. [Google Scholar] [CrossRef]
- Pinares, G.; Bongiorno, M. Analysis and Mitigation of Instabilities Originated From DC-Side Resonances in VSC-HVDC Systems. IEEE Trans. Ind. Appl. 2016, 52, 2807–2815. [Google Scholar] [CrossRef]
- Song, Y.; Breitholtz, C. Nyquist Stability Analysis of an AC-Grid Connected VSC-HVDC System Using a Distributed Parameter DC Cable Model. IEEE Trans. Power Deliv. 2016, 31, 898–907. [Google Scholar] [CrossRef]
- Amin, M.; Molinas, M. Small-Signal Stability Assessment of Power Electronics Based Power Systems: A Discussion of Impedance- and Eigenvalue-Based Methods. IEEE Trans. Ind. Appl. 2017, 53, 5014–5030. [Google Scholar] [CrossRef]
- Yu, X.; Salato, M. An Optimal Minimum-Component DC–DC Converter Input Filter Design and Its Stability Analysis. IEEE Trans. Power Electron. 2014, 29, 829–840. [Google Scholar]
- Cespedes, M.; Xing, L.; Sun, J. Constant-Power Load System Stabilization by Passive Damping. IEEE Trans. Power Electron. 2011, 26, 1832–1836. [Google Scholar] [CrossRef]
- Radwan, A.A.A.; Mohamed, A.R.I. Linear Active Stabilization of Converter-Dominated DC Microgrids. IEEE Trans. Smart Grid. 2012, 3, 203–216. [Google Scholar] [CrossRef]
- Wu, M.; Lu, D.C. A Novel Stabilization Method of LC Input Filter With Constant Power Loads Without Load Performance Compromise in DC Microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4552–4562. [Google Scholar] [CrossRef]
- Wu, W.; Chen, Y.; Luo, A.; Zhou, L.; Zhou, X.; Yang, L.; Huang, X. A Virtual Phase-Lead Impedance Stability Control Strategy for the Maritime VSC-HVDC System. IEEE Trans. Ind. Inf. 2018, 14, 5475–5486. [Google Scholar] [CrossRef]
- Tang, X.; Zhang, K.; Xu, Q.; Chen, S.; Tan, W. Control strategy for enlarging the transmission capacity of VSC-HVDC systems supplying passive networks. Trans. China Electron. 2016, 31, 44–51. [Google Scholar]
- Paquette, A.D.; Divan, D.M. Virtual Impedance Current Limiting for Inverters in Microgrids With Synchronous Generators. IEEE Trans. Ind. Appl. 2015, 51, 1630–1638. [Google Scholar] [CrossRef]
- Lu, X.; Wang, J.; Guerrero, J.M.; Zhao, D. Virtual-Impedance-Based Fault Current Limiters for Inverter Dominated AC Microgrids. IEEE Trans. Smart Grid 2018, 9, 1599–1612. [Google Scholar] [CrossRef]
- Rizqiawan, A.; Fujita, G.; Funabashi, T.; Nomura, M. Impact of a virtual impedance on the input admittance of a grid—Connected inverter. IEEE Trans. Electr. Electron. 2013, 8, 190–198. [Google Scholar] [CrossRef]
- Li, Y.; Tang, G.; Ge, J.; He, Z.; Pang, H.; Yang, J.; Wu, Y. Modeling and Damping Control of Modular Multilevel Converter Based DC Grid. IEEE Trans. Power Syst. 2018, 33, 723–735. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | |
|---|---|---|
| Converter and AC system | System capacity Sn/MW | 500 |
| Line voltage of grid ug/kV | 110 | |
| DC voltage Vdc/kV | 250 | |
| Grid internal resistance Rn/Ω | 0.2 | |
| Grid frequency ω0/Hz | 50 | |
| Grid internal inductance Ln/H | 1 × 10−3 | |
| Filter reactor inductance Lc/H | 4.5 × 10−2 | |
| Filter reactor resistance Rc/Ω | 0.2 | |
| DC side capacitance Cdc/μf | 300 | |
| DC cable | DC cable resistance Rd/Ω/km | 1.39 × 10−2 |
| DC cable inductance Ld/H/km | 1.59 × 10−4 | |
| DC cable capacitance Cd/F/km | 2.31 × 10−7 | |
| Controller | DC voltage outer loop kpvdc/kivdc | 15/100 |
| Current inner loop kpc/kic | 0.5/0.1 | |
| Active power outer loop kpp/kip | 1/10 | |
| Phase locked loop kpPLL/kiPLL | 10/100 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Liu, K.; Liao, X.; Zhu, S.; Huai, Q. A Virtual Impedance Control Strategy for Improving the Stability and Dynamic Performance of VSC–HVDC Operation in Bidirectional Power Flow Mode. Appl. Sci. 2019, 9, 3184. https://0-doi-org.brum.beds.ac.uk/10.3390/app9153184
Li Y, Liu K, Liao X, Zhu S, Huai Q. A Virtual Impedance Control Strategy for Improving the Stability and Dynamic Performance of VSC–HVDC Operation in Bidirectional Power Flow Mode. Applied Sciences. 2019; 9(15):3184. https://0-doi-org.brum.beds.ac.uk/10.3390/app9153184
Chicago/Turabian StyleLi, Yuye, Kaipei Liu, Xiaobing Liao, Shu Zhu, and Qing Huai. 2019. "A Virtual Impedance Control Strategy for Improving the Stability and Dynamic Performance of VSC–HVDC Operation in Bidirectional Power Flow Mode" Applied Sciences 9, no. 15: 3184. https://0-doi-org.brum.beds.ac.uk/10.3390/app9153184