Multi-Media and Multi-Band Based Adaptation Layer Techniques for Underwater Sensor Networks

 ,
,
Abstract
:1. Introduction
1.1. Needs of Multi-Band Communication Techniques Underwater
1.2. Need of Multi-Media Communication Techniques Underwater
1.3. Benefits of Multi-Media/Multi-Band Communication Techniques Underwater
- Increase the lifetime of sensor nodes
- Increase the reliability of data transmission
- Improve the faster discovery of neighbor nodes
- Reduce the transmission delay between nodes
- Long-term connectivity between nodes
- Faster medium selection mechanism to transfer data
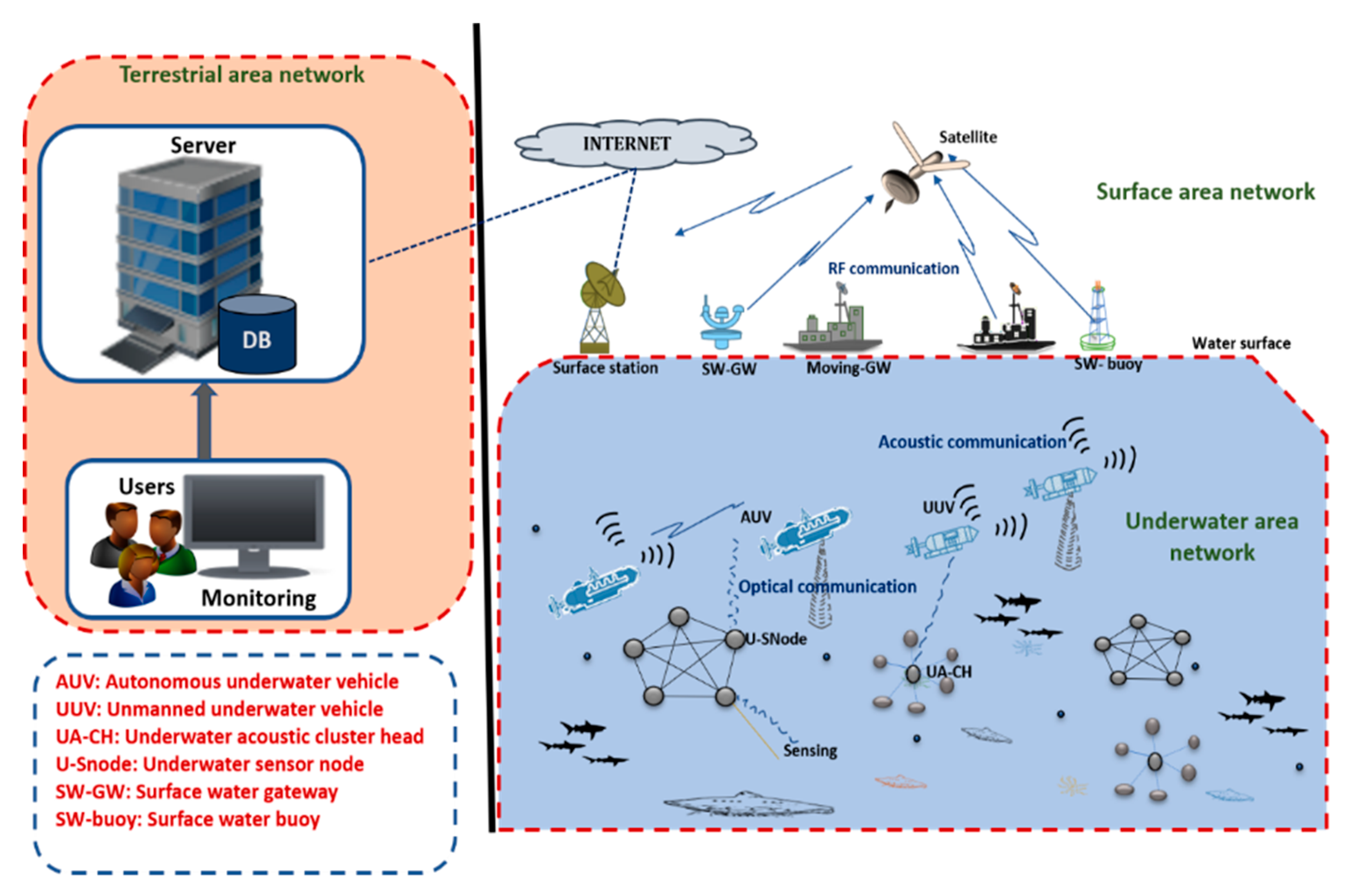
2. Underwater Communication Technology Overview
2.1. Radio Frequency (RF) Communication
2.2. Optical Communication
2.3. Acoustic Commiunication
2.4. Visible Light Communication (VLC)
2.5. Magnetic Induction (MI)
3. Limitation and Advantages of Underwater Communication Technology
4. Challenges Faced by the Acoustic Signal in Underwater Communication Technology
4.1. Challenges in Acoustic Signal
- Low bandwidth: In underwater environments, the noise is very high because of very low medium frequencies. The bandwidth is highly dependable on the distance of the transmission, that can be lesser than 1 KHz [1].
- High channel error rate: The interference in underwater acoustic channels is due to fading and multipath. This can cause connection losses due to high channel error rates in acoustic communication [1].
- Large propagation delay: The speed of underwater acoustic communication varies from 1480 m/s to 1540 m/s [2,3]. Hence, the propagation delay is five times higher than the radio frequency (RF) in terrestrial area networks. Similarly, there is an extreme level of variation in propagation delay depending on the water pressure, temperature, salinity, etc. Though propagation delay is the critical point for underwater acoustic sensor networks, deep designs for MAC protocols are considered [4].
- High energy consumption: In acoustic communication, the magnitude is higher when compared to the terrestrial environment. The ratio of power usage is even higher when compared to the terrestrial environment. The batteries in the constrained environment cannot be rechargeable [5].
- Low memory storage: The memory storage level of the underwater nodes is less than that of terrestrial nodes [6].
- Problems with sensors due to fouling: The sensor nodes that are deployed in underwater environments can accumulate waste materials such as soil, fish waste, oils, etc. This can affect the operation of sensor nodes [6].
- Multipath and surface scattering: Due to multipath and surface scattering, when the signal is sent from the source to destination via different paths, the strength of the signal could decrease. This causes problems in data transmission [7].
- Problems in routing: Routing in underwater communication faces challenges such as reliability in data transmission, network connectivity, forwarding of data, and variations in the link. Therefore, in underwater communication, routing is the most difficult issue. Hence, a multi-channel/multi-band adaptation layer is needed in underwater communication.
4.2. Challenges in MAC Protocol
- Topology design: The underwater network’s infrastructure always changes due to node mobility, node failure, adding new nodes, etc. The performance of MAC protocol depends on the topology design. So, topology design is a critical task in the underwater environment.
- Sensor node deployment: In underwater networks, the sensor nodes are sparsely deployed in different places. Long-range communication depends on the availability of connections between the nodes. So, in the MAC protocol, the design of the node deployment is a critical issue.
- Time synchronization: In the MAC protocol, the power cycling method works on time synchronization. In order to handle time certainty between nodes, time synchronization is necessary in MAC protocols.
- Power wastage: The power wastage in sensor nodes is because of collisions while transmitting data. So, MAC protocols must be designed to avoid collisions between nodes.
- Other Issues: Also, the MAC protocol underwater gives rise to other problems, such as making connections with centralized networks, high delays for handshaking, collision avoidance problems, etc.
5. Analyzing the Challenges and Advantages of Protocols in Underwater Communication
5.1. MAC Layer Protocols
5.1.1. Contension-Free Based MAC Protocol Design
5.1.2. Contension Based MAC Protocol Design
5.1.3. Hybrid MAC Protocol Design
5.2. Routing Layer Protocols
5.2.1. Routing Protocols Including Localization Techniques
5.2.2. Routing Protocols without Localization Techniques
5.3. Transport Layer Protocol
6. Related Studies Based on Multi-Band and Multi-Media Communication Technologies
6.1. Multi-Band Underwater Communication
6.2. Multi-Media Underwater Communication
- START: In the starting stage, the default-band can be used by the nodes.
- ALERT: In this stage, the nodes should be aware of increases in noise, so that they might change to a new frequency band.
- TRACKING: In this stage, the nodes exchange their information with neighboring nodes using PREQ (packet used for noise level request) and PRES (packet used to replay to noise level request) to get the updates about the noise level.
- NEW-CHANNEL: The node changes the current band and transmits through a new band.
6.3. Multi-Band Techniques for Adaptation Layer
7. Proposed Scheme
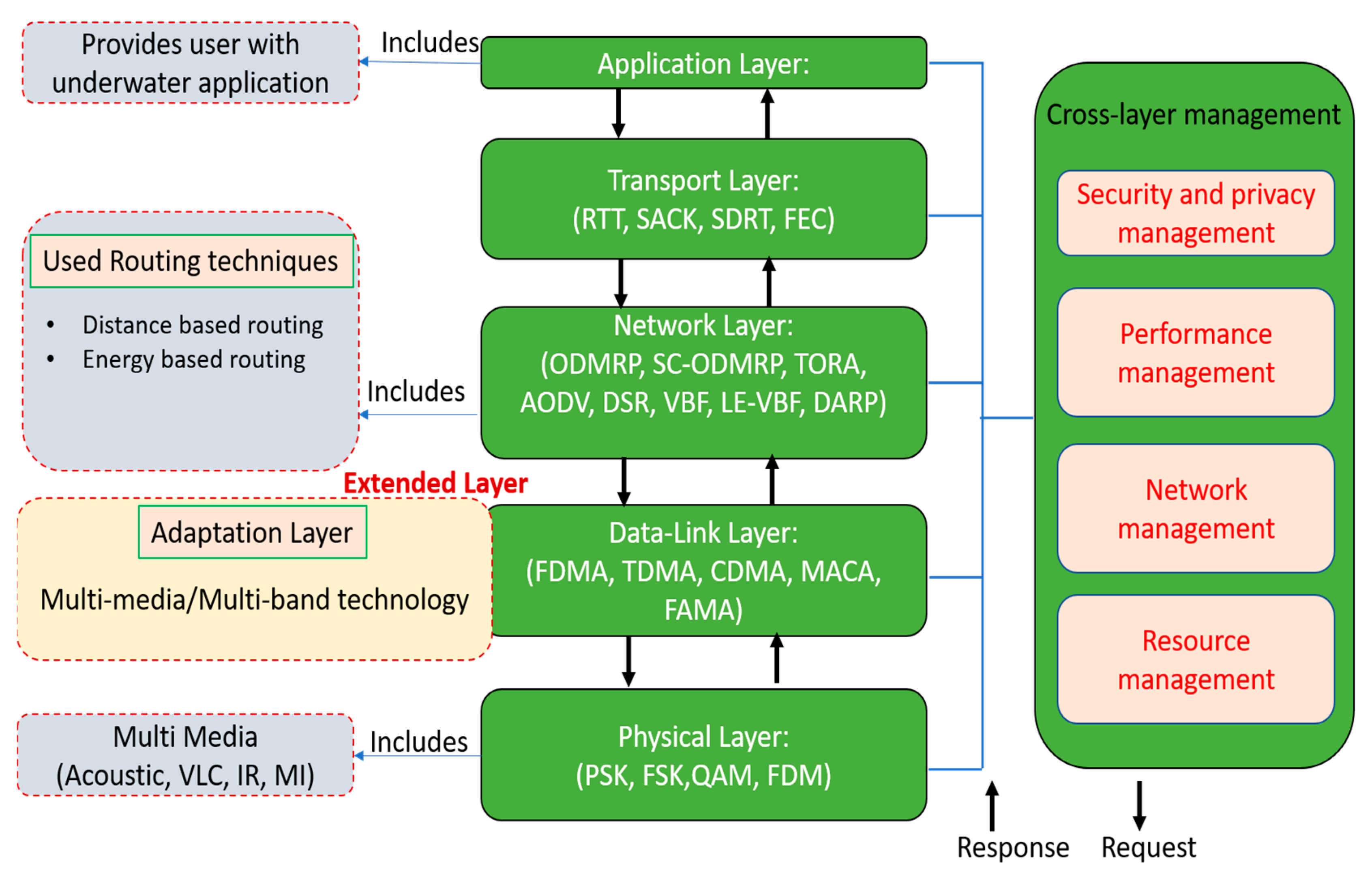
7.1. Protocol Stack of Mult-Band and Mult-Medium Techniques
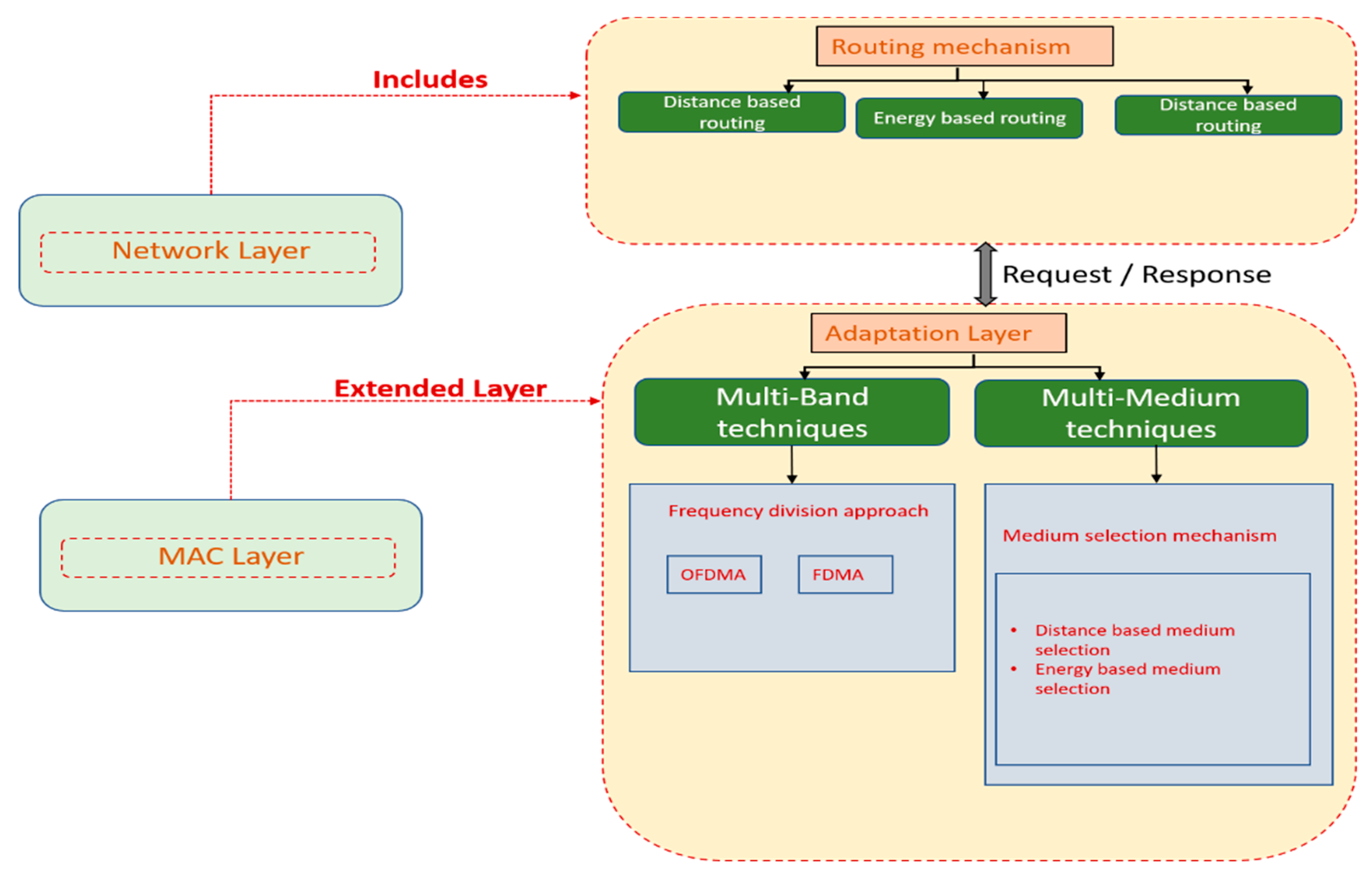
7.2. Proposed Adapation Layer Scheme
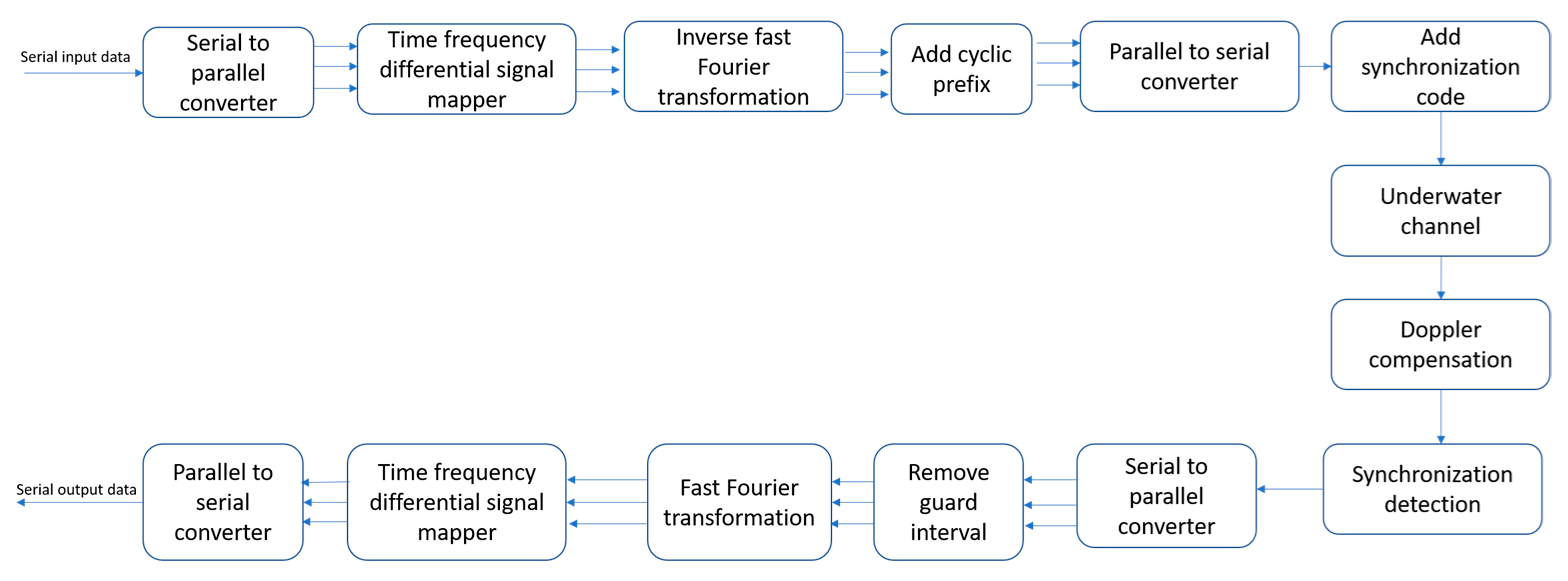
7.3. Modem Design of Proposed Scheme
7.4. Medium Selection Mechanism
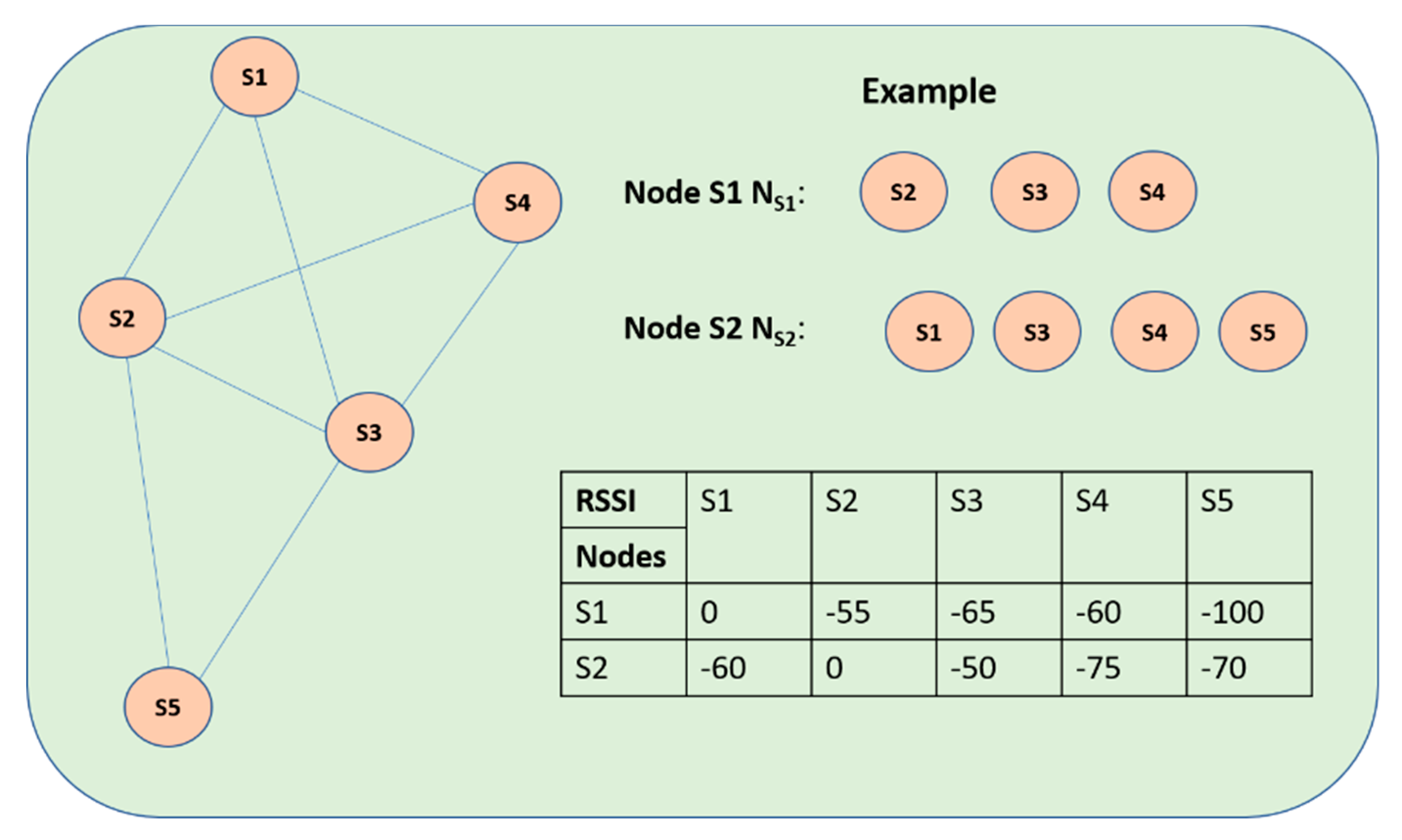
7.4.1. Distance Calculation
Received Signal Strength Calculation
Distance Estimation of Nearby Node Using Manhattan Method
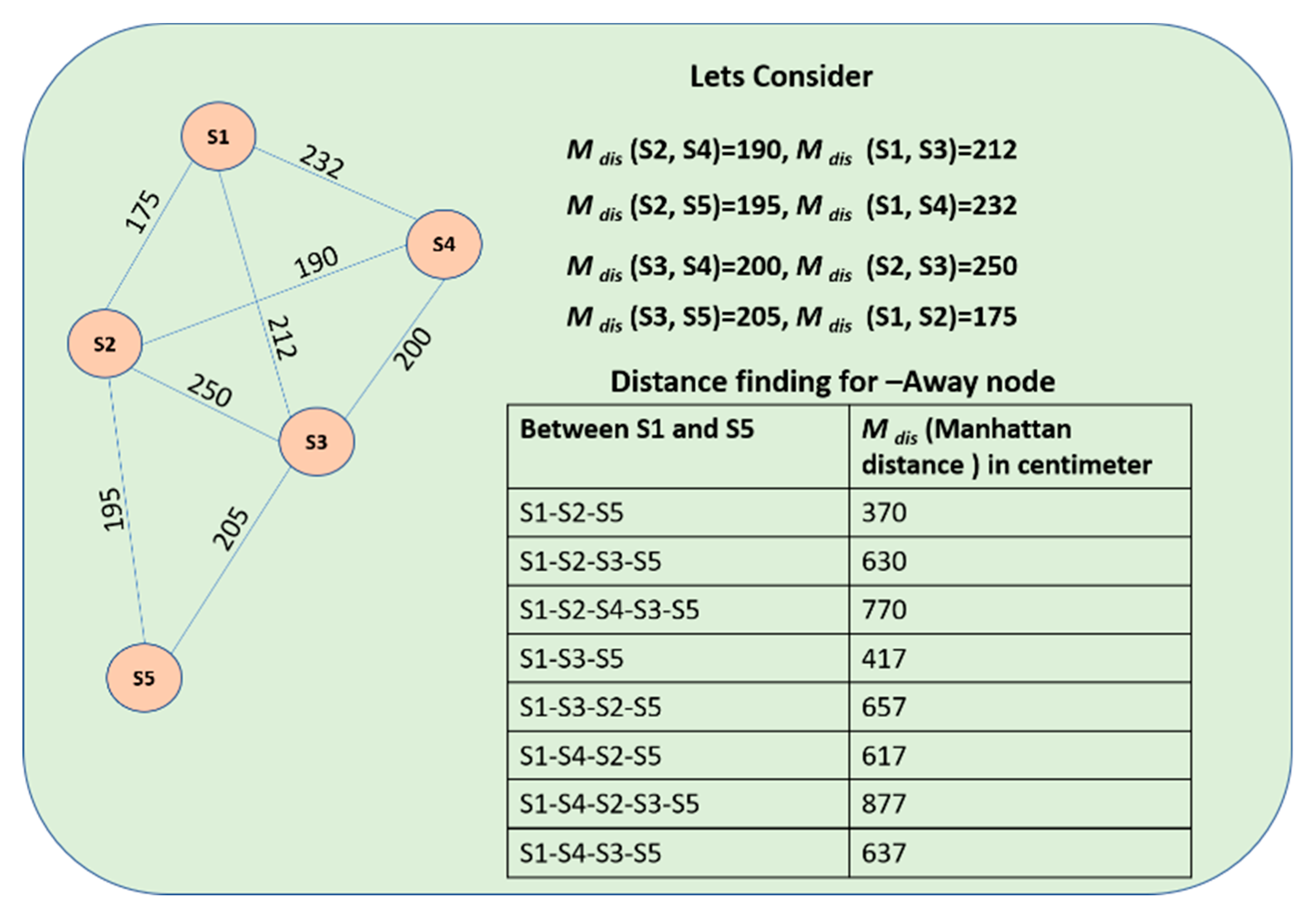
Distance Estimation of Far-Away Node Using Manhattan Method
7.4.2. Medium Selection and Data Transfer
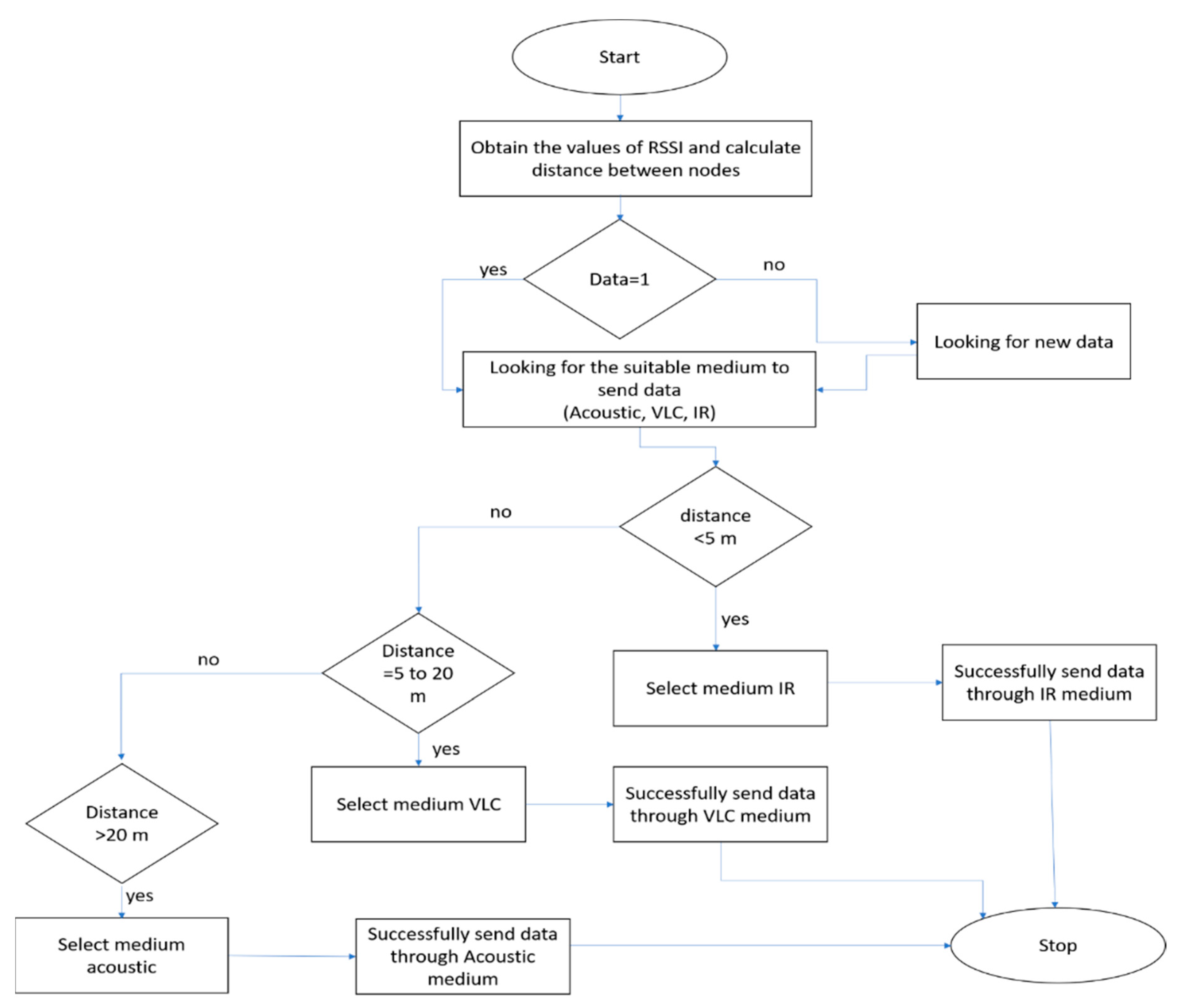
7.4.2.1. Flowchart for Medium Selection Mechanism
7.4.2.2. Algorithm for Medium Selection Mechanism
| Algorithm 1: Medium Selection Algorithm |
| 1. begin |
| a. for i = 1 to n, where n is the number of nodes |
| i. Obtain the value of RSSI and calculate the distance between the nearby nodes |
| ii. if data is available (data = 1) |
| 1. if distance is less than 5 m |
| Select IR as the medium, goto step 4 |
| 2. else if distance is between 5 and 20 m |
| Select VLC as the medium, goto step 4 |
| 3. else if distance is greater than 20 m |
| Select acoustic as the medium, goto step 4 |
| 4. Send data through the medium selected. |
| iii. else if data is not available (data = 0) |
| 1. Wait for new data to arrive |
| b. end for |
| 2. end |
7.4.2.3. Scenario for Medium Selection Mechanism
8. Implementation Setup and Results
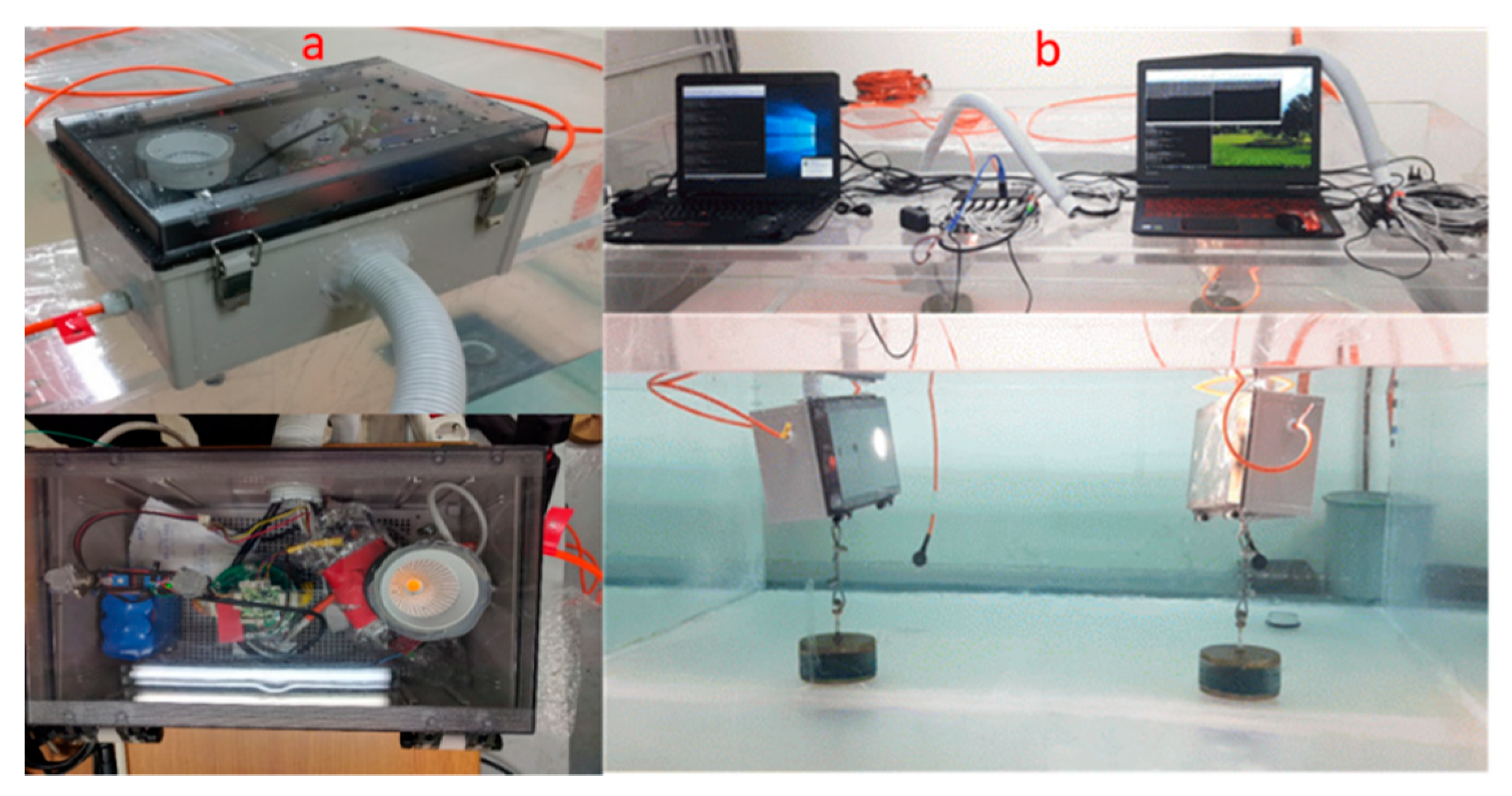
8.1. Multi-Media Modem
8.2. Multi-Media/Multi-Band Modem Setup and Testing
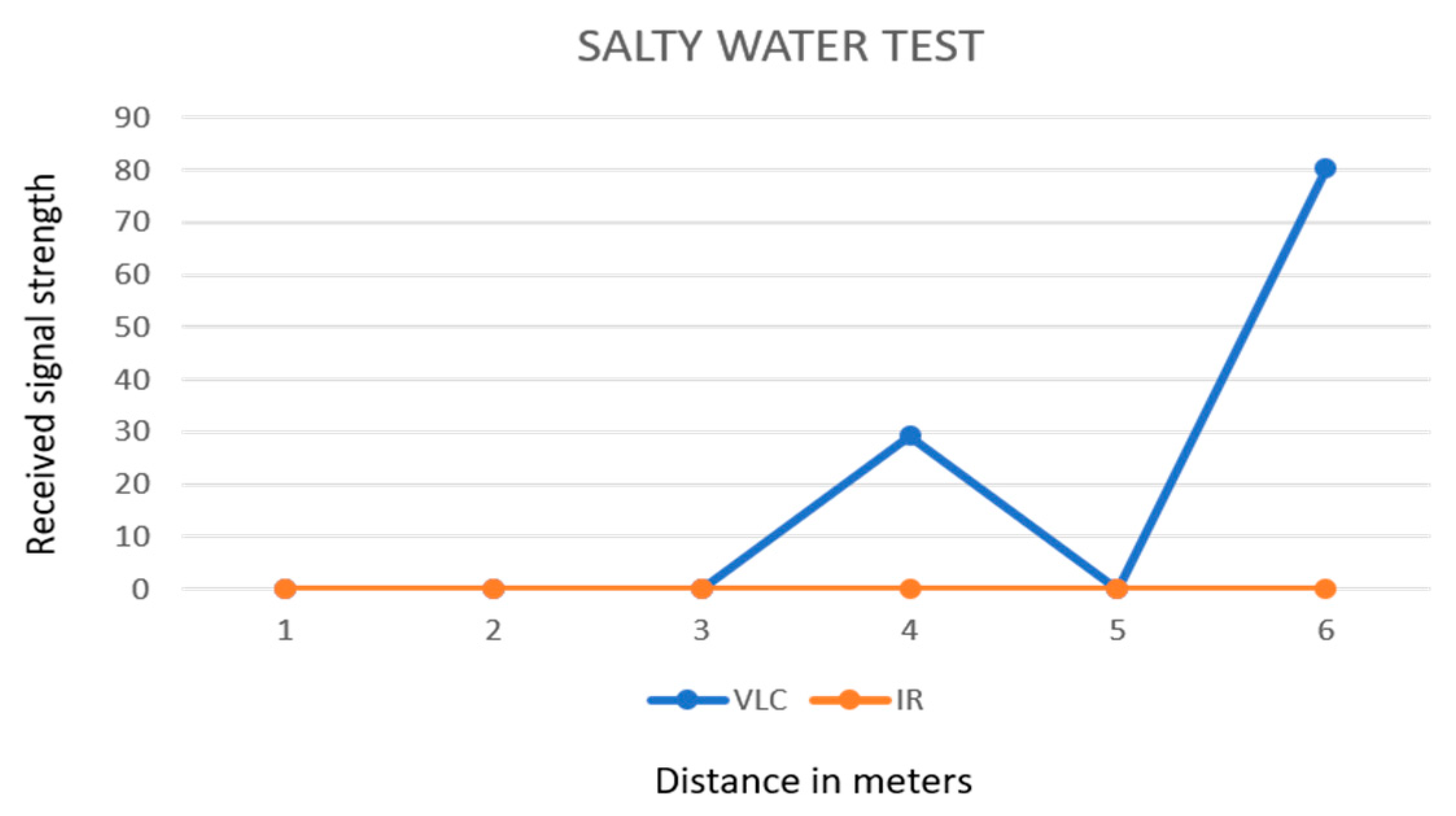
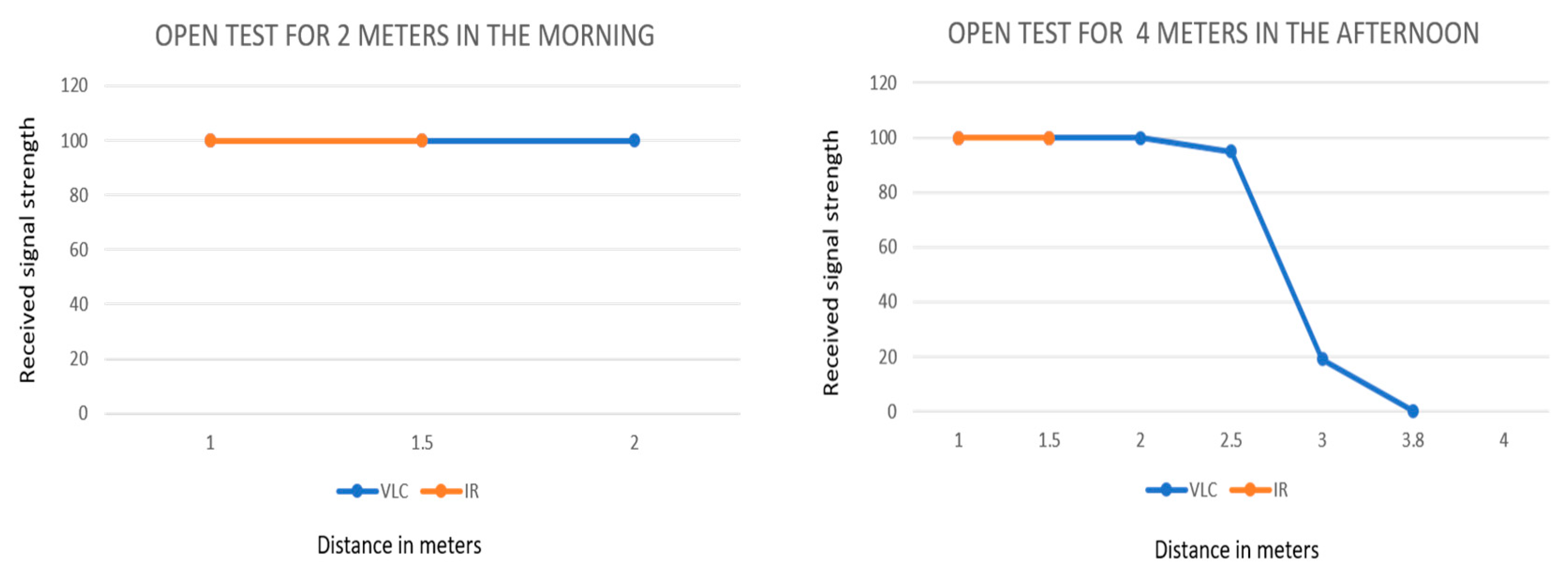
8.3. Multi-Media/Multi-Band Tested Results
9. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Casari, P.; Zorzi, M. Protocol design issues in underwater acoustic networks. Comput. Commun. 2011, 34, 2013–2025. [Google Scholar] [CrossRef]
- Paul, C. Underwater Acoustic Modelling and Simulation, 3rd ed.; Taylor and Francis Group: Milton Park, Didcot, UK, 2003. [Google Scholar]
- Barbeau, M.; Garcia-Alfaro, J.; Kranakis, E.; Porretta, S. The Sound of Communication in Underwater Acoustic Sensor Networks; Springer: Cham, Switzerland, 2018. [Google Scholar] [CrossRef]
- GBurrowes, E.; Khan, J.Y. Investigation of a short-range underwater acoustic communication channel for MAC protocol design. In Proceedings of the 2010 4th International Conference on Signal Processing and Communication Systems, Gold Coast, QLD, Australia, 13–15 December 2010; pp. 1–8. [Google Scholar] [CrossRef]
- Deng, M.; Chen, H.; Xie, L. A hybrid MAC protocol in data-collection-oriented underwater acoustic sensor networks. In Proceedings of the OCEANS 2017—Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Jindal, H.; Saxena, S.; Singh, S. Challenges and issues in underwater acoustics sensor networks: A review. In Proceedings of the 2014 International Conference on Parallel, Distributed and Grid Computing, Solan, India, 11–13 December 2014; pp. 251–255. [Google Scholar] [CrossRef]
- De Rango, F.; Veltri, F.; Fazio, P. A multipath fading channel model for underwater shallow acoustic communications. In Proceedings of the 2012 IEEE International Conference on Communications (ICC), Ottawa, ON, USA, 10–15 June 2012; pp. 3811–3815. [Google Scholar] [CrossRef]
- Kim, J.; Lee, J.; Jang, Y.; Son, K.; Cho, H. A CDMA-Based MAC Protocol in Tree-Topology for Underwater Acoustic Sensor Networks. In Proceedings of the 2009 International Conference on Advanced Information Networking and Applications Workshops, Bradford, UK, 26–29 May 2009; pp. 1166–1171. [Google Scholar]
- Fan, G.; Chen, H.; Xie, L.; Wang, K. An Improved CDMA-Based MAC Protocol for Underwater Acoustic Wireless Sensor Networks. In Proceedings of the 2011 7th International Conference on Wireless Communications, Networking and Mobile Computing, Wuhan, China, 23–25 September 2011; pp. 1–4. [Google Scholar]
- Tan, H.; Seah, W.K.G. Distributed CDMA-based MAC Protocol for Underwater Sensor Networks. In Proceedings of the 32nd IEEE Conference on Local Computer Networks (LCN 2007), Dublin, Germany, 15–18 October 2007; pp. 26–36. [Google Scholar] [CrossRef]
- Kredo, K., II; Djukic, P.; Mohapatra, P. STUMP: Exploiting Position Diversity in the Staggered TDMA Underwater MAC Protocol. In Proceedings of the IEEE INFOCOM 2009, Rio de Janeiro, Ireland, 15–18 October 2009; pp. 2961–2965. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Shin, S.; Park, S. Efficiency Reservation MAC Protocol for Underwater Acoustic Sensor Networks. In Proceedings of the 2008 Fourth International Conference on Networked Computing and Advanced Information Management, Gyeongju, Korea, 2–4 September 2008; pp. 365–370. [Google Scholar]
- Lin, W.; Li, D.; Chen, J.; Sun, T.; Wang, T. A wave-like amendment-based time-division medium access slot allocation mechanism for underwater acoustic sensor networks. In Proceedings of the 2009 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery, Zhangijajie, China, 10–12 October 2009; pp. 369–374. [Google Scholar]
- Acar, G.; Adams, A.E. ACMENet: An underwater acoustic sensor network protocol for real-time environmental monitoring in coastal areas. Proc. IEE Proc. Radar Sonar Navig. 2006, 153, 365–380. [Google Scholar] [CrossRef]
- Chen, Y.; Lien, C.; Chuang, S.; Shih, K. DSSS: A TDMA-based MAC protocol with Dynamic Slot Scheduling Strategy for underwater acoustic sensor networks. In Proceedings of the OCEANS 2011 IEEE—Spain, Santander, Spain, 6–9 June 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Yackoski, J.; Shen, C.C. UW-FLASHR: Achieving High Channel Utilization in a Time-Based Acoustic Mac Protocol; ACM: New York, NY, USA, 2008; pp. 59–66. [Google Scholar] [CrossRef]
- Hsu, C.; Lai, K.; Chou, C.; Lin, K.C. ST-MAC: Spatial-Temporal MAC Scheduling for Underwater Sensor Networks. In Proceedings of the IEEE INFOCOM 2009, Rio de Janeiro, Brazil, 19–25 April 2009; pp. 1827–1835. [Google Scholar] [CrossRef]
- Khalil, I.M.; Gadallah, Y.; Hayajneh, M.; Khreishah, A. An Adaptive OFDMA-Based MAC Protocol for Underwater Acoustic Wireless Sensor Networks. Sensors (Basel Switzerland) 2012, 12, 8782–8805. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bouabdallah, F.; Boutaba, R. A Distributed OFDMA Medium Access Control for Underwater Acoustic Sensors Networks. In Proceedings of the 2011 IEEE International Conference on Communications (ICC), Kyoto, Japan, 5–9 June 2011; pp. 1–5. [Google Scholar] [CrossRef]
- Wang, L.; Lin, C.; Chen, K.; Zhang, Y. A Learning-Based ALOHA Protocol for Underwater Acoustic Sensor Networks; ACM: New York, NY, USA, 2018; pp. 1–2. [Google Scholar] [CrossRef]
- Syed, A.A.; Ye, W.; Heidemann, J. T-Lohi: A New Class of MAC Protocols for Underwater Acoustic Sensor Networks. In Proceedings of the IEEE INFOCOM 2008—The 27th Conference on Computer Communications, Phoenix, AZ, USA, 13–18 April 2008; pp. 231–235. [Google Scholar] [CrossRef]
- Rahman, P.; Alam, M.S.; Shawkat, S.A.; Hoque, M.A. CUMAC-CAM: Addressing Triple Hidden Terminal Problems for Multi-Channel Transmission in Underwater Sensor Networks; ACM: New York, NY, USA, 2017. [Google Scholar] [CrossRef]
- Chirdchoo, N.; Soh, W.; Chua, K.C. MACA-MN: A MACA-Based MAC Protocol for Underwater Acoustic Networks with Packet Train for Multiple Neighbors. In Proceedings of the VTC Spring 2008—IEEE Vehicular Technology Conference, Singapore, 11–14 May 2008; pp. 46–50. [Google Scholar]
- Xie, P.; Cui, J.H. R-MAC: An energy-efficient MAC protocol for underwater sensor networks. In Proceedings of the WASA 2007—The 2nd International Conference on Wireless Algorithms, Systems and Applications, Chicago, IL, USA, 1–3 August 2007; pp. 187–198. [Google Scholar] [CrossRef]
- Kuo, L.; Melodia, T. Distributed Medium Access Control Strategies for MIMO Underwater Acoustic Networking. Proc. IEEE Trans. Wirel. Commun. 2011, 10, 2523–2533. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.D.; Liu, S.S.; Chang, C.M.; Shih, K.P. CS-MAC: A Channel Stealing MAC protocol for improving bandwidth utilization in underwater wireless acoustic networks. In Proceedings of the OCEANS’11 MTS/IEEE KONA, Waikoloa, HI, USA, 19–22 September 2011; pp. 1–5. [Google Scholar]
- Ng, H.; Soh, W.; Motani, M. MACA-U: A Media Access Protocol for Underwater Acoustic Networks. In Proceedings of the IEEE GLOBECOM 2008—2008 IEEE Global Telecommunications Conference, New Orleans, LA, USA, 30 November–4 December 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Peng, Z.; Zhu, Y.; Zhou, Z.; Guo, Z.; Cui, J. COPE-MAC: A Contention-based medium access control protocol with Parallel Reservation for underwater acoustic networks. In Proceedings of the OCEANS’10 IEEE SYDNEY, Sydney, NSW, Australia, 24–27 May 2010; pp. 1–10. [Google Scholar]
- Chao, C.; Wang, Y. A Multiple Rendezvous Multichannel MAC Protocol for Underwater Sensor Networks. In Proceedings of the 2010 IEEE Wireless Communication and Networking Conference, Sydney, NSW, Australia, 18–21 April 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Chirdchoo, N.; Soh, W.; Chua, K.C. RIPT: A Receiver-Initiated Reservation-Based Protocol for Underwater Acoustic Networks. IEEE J. Sel. Areas Commun. 2008, 26, 1744–1753. [Google Scholar] [CrossRef] [Green Version]
- Diamant, R.; Lampe, L. A Hybrid Spatial Reuse MAC Protocol for Ad-Hoc Underwater Acoustic Communication Networks. In Proceedings of the 2010 IEEE International Conference on Communications Workshops, Capetown, South Africa, 23–27 May 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Mehta, S.; Kwak, K.S. H-MAC: A hybrid MAC protocol for wireless sensor networks. Int. J. Comput. Netw. Commun. 2010, 2. [Google Scholar] [CrossRef]
- Zheng, T.; Radhakrishnan, S.; Sarangan, V. PMAC: An adaptive energy-efficient MAC protocol for wireless sensor networks. In Proceedings of the 19th IEEE International Parallel and Distributed Processing Symposium, Denver, CO, USA, 4–8 April 2005; p. 8. [Google Scholar] [CrossRef]
- Watfa, M.K.; Selman, S.; Denkilkian, H. UW-MAC: An underwater sensor network MAC protocol. Int. J. Commun. Syst. 2010, 23, 485–506. [Google Scholar] [CrossRef]
- Wu, X.; Chen, G.; Chen, J. Energy-Efficient and Topology-Aware Routing for Underwater Sensor Networks. In Proceedings of the 2010 Proceedings of 19th International Conference on Computer Communications and Networks, Zurich, Switzerland, 2–5 August 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, J.; Wu, X.; Chen, G. REBAR: A Reliable and Energy Balanced Routing Algorithm for UWSNs. In Proceedings of the 2008 Seventh International Conference on Grid and Cooperative Computing, Shenzhen, China, 24–26 October 2008; pp. 349–355. [Google Scholar] [CrossRef]
- Chen, Y.; Lien, C.; Wang, C.; Shih, K. DARP: A depth adaptive routing protocol for large-scale underwater acoustic sensor networks. In Proceedings of the 2012 Oceans—Yeosu, Yeosu, Korea, 21–24 May 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Xiao, X.; Ji, X.P.; Yang, G.; Cong, Y.P. LE-VBF: Lifetime-Extended Vector-Based Forwarding Routing. In Proceedings of the 2012 International Conference on Computer Science and Service System, Nanjing, China, 11–13 August 2012; pp. 1201–1203. [Google Scholar] [CrossRef]
- Chen, Y.; Lin, Y. Mobicast Routing Protocol for Underwater Sensor Networks. IEEE Sens. J. 2013, 13, 737–749. [Google Scholar] [CrossRef]
- Souiki, S.; Feham, M.; Feham, M.; Labraoui, N. Geographic Routing Protocols for Underwater Wireless Sensor Networks: A Survey. Int. J. Wirel. Mob. Netw. 2014, 6. [Google Scholar] [CrossRef]
- Xie, P.; Zhou, Z.; Peng, Z.; Cui, J.H.; Shi, Z. Void Avoidance in Mobile Underwater Sensor Networks. In Proceedings of the Second ACM International Workshop on UnderWater Networks 2019, Atlanta, GA, USA, 23–25 October 2019. [Google Scholar]
- Li, C.; Xu, Y.; Diao, B.; Wang, Q.; An, Z. DBR-MAC: A Depth-Based Routing Aware MAC Protocol for Data Collection in Underwater Acoustic Sensor Networks. IEEE Sens. J. 2016, 16, 3904–3913. [Google Scholar] [CrossRef]
- Faheem, M.; Tuna, G.; Gungor, V.C. QERP: Quality-of-Service (QoS) Aware Evolutionary Routing Protocol for Underwater Wireless Sensor Networks. IEEE Syst. J. 2018, 12, 2066–2073. [Google Scholar] [CrossRef]
- Jafri, M.R.; Ahmed, S.; Javaid, N.; Ahmad, Z.; Qureshi, R.J. AMCTD: Adaptive Mobility of Courier Nodes in Threshold-Optimized DBR Protocol for Underwater Wireless Sensor Networks. In Proceedings of the 2013 Eighth International Conference on Broadband and Wireless Computing, Communication and Applications, Compiegne, France, 28–30 October 2013; pp. 93–99. [Google Scholar]
- Liang, W.; Yu, H.; Liu, L.; Li, B.; Che, C. Information-Carrying Based Routing Protocol for Underwater Acoustic Sensor Network. In Proceedings of the 2007 International Conference on Mechatronics and Automation, Harbin, China, 26–29 July 2007; pp. 729–734. [Google Scholar] [CrossRef]
- Wahid, A.; Lee, S.; Kim, D.; Lim, K.S. MRP: A Localization-Free Multi-Layered Routing Protocol for Underwater Wireless Sensor Networks. Wirel. Pers. Commun. 2014, 77, 2997–3012. [Google Scholar] [CrossRef]
- Cai, S.; Yao, N.; Gao, Z. A reliable data transfer protocol based on twin paths and network coding for underwater acoustic sensor network. EURASIP J. Wirel. Commun. Netw. 2015, 2015, 28. [Google Scholar] [CrossRef] [Green Version]
- Geethu, K.S.; Babu, A.V.S. Erasure Codes Based Adaptive Multi-Hop Reliable Data Transfer for Underwater Acoustic Sensor Networks. Wirel. Pers. Commun. 2017, 94, 579–604. [Google Scholar] [CrossRef]
- Wang, P.; Li, J.; Zhang, X. Adaptive RTT-driven transport-layer flow and error control protocol for QoS guaranteed image transmission over multi-hop underwater wireless networks: Design, implementation, and analysis. In Proceedings of the 2014 IEEE International Conference on Communications (ICC), Sydney, NSW, Australia, 10–14 June 2014; pp. 5142–5147. [Google Scholar]
- Xie, P.; Zhou, Z.; Peng, Z.; Cui, J.H.; Shi, Z. SDRT: A reliable data transport protocol for underwater sensor networks. Ad Hoc Netw. 2010, 8, 708–722. [Google Scholar] [CrossRef]
- Leus, G.; van Walree, P.A. Multiband OFDM for Covert Acoustic Communications. IEEE J. Sel. Areas Commun. 2008, 26, 1662–1673. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.S.; Baek, C.U.; Jung, J.W.; Kim, W.J. A Weighted Turbo Equalized Multi-Band Underwater Wireless Acoustic Communications. Appl. Sci. 2018, 8, 1711. [Google Scholar] [CrossRef]
- Qi, S.; Gan, C.; Qi, Y.; Ma, X.; Yang, D. Dynamic bandwidth schedule in multi-wavelength access network based on OFDM-PON. In Proceedings of the 2011 International Conference on Multimedia Technology, Hangzhou, China, 26–28 July 2011; pp. 5386–5389. [Google Scholar]
- Freitag, L.E.; Grund, M.; Partan, J.; Ball, K.; Singh, S.; Koski, P. Multi-band acoustic modem for the communications and navigation aid AUV. In Proceedings of the OCEANS 2005 MTS/IEEE, Washington, DC, USA, 17–23 September 2005; Volume 2, pp. 1080–1085. [Google Scholar]
- Chung, K.W.; Li, H.; Sutin, A. A Frequency-Domain Multi-Band Matched-Filter Approach to Passive Diver Detection. In Proceedings of the 2007 Conference Record of the Forty-First Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 4–7 November 2007; pp. 1252–1256. [Google Scholar]
- Zidi, C.; Bouabdallah, F.; Boutaba, R.; Mehaoua, A. MC-UWMAC: A multi-channel MAC protocol for underwater sensor networks. In Proceedings of the 2017 International Conference on Wireless Networks and Mobile Communications (WINCOM), Rabat, Morocco, 1–4 November 2017; pp. 1–6. [Google Scholar]
- Pescosolido, L.; Petrioli, C.; Picari, L. A multi-band Noise-aware MAC protocol for underwater acoustic sensor networks. In Proceedings of the 2013 IEEE 9th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Lyon, France, 7–9 October 2013; pp. 513–520. [Google Scholar]
- Tu, K.; Duman, T.M.; Stojanovic, M.; Proakis, J.G. OFDMA for underwater acoustic communications. In Proceedings of the 2011 49th Annual Allerton Conference on Communication, Control, and Computing (Allerton), Monticello, IL, USA, 28–30 September 2011; pp. 633–638. [Google Scholar]
- Chen, P.; Ma, H.; Gao, S.; Huang, Y. SSL: Signal Similarity-Based Localization for Ocean Sensor Networks. Sensors 2015, 15, 29702–29720. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gupta, S.; Bhatia, V. A Manhattan Distance approach for energy optimization in wireless sensor network. In Proceedings of the 2015 1st International Conference on Next Generation Computing Technologies (NGCT), Dehradun, India, 4–5 September 2015; pp. 203–206. [Google Scholar]
- Won, T.-H.; Park, S.-J. Design and Implementation of an Omni-Directional Underwater Acoustic Micro-Modem Based on a Low-Power Micro-Controller Unit. Sensors 2012, 12, 2309–2323. [Google Scholar] [CrossRef] [PubMed]
- Research Design Lab. Available online: https://researchdesignlab.com/wireless/li-fi/lifi-nano-v2.html (accessed on 20 July 2019).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Acoustic | RF | Optical |
|---|---|---|---|
| Attenuation underwater | Distance and frequency band dependent (0.1–4 dB/km) | Frequency dependent on (3.4–5 dB/m) | 0.39 dB/m (in ocean) 11 dB/m (in turbid water) |
| Speed of signal (m/s) | ≈1500 ms−1 | 2.3 × 108 ms−1 | 2.3 × 108 ms−1 |
| Data transfer rate | ≈kbps | ≈Mbps | ≈Gbps |
| Delay in communication | High | Moderate | Low |
| Approximate Distance | ≈km | <10.5 m | ≈10−99 m |
| Bandwidth | 1–100 kHz | ≈MHz | ≤150 MHz |
| Frequency band | 10−15 kHz | 30−300 Hz | ≈5 × 1014 Hz |
| Transmission power | >10 W | mW−W | mW−W |
| Antenna size | 0.1 m | 0.5 m | 0.1 m |
| Performance parameter | Temperature, pressure and salinity | Conductivity | Absorption and turbidity |
| Parameters | MI | Low Frequency | IR |
|---|---|---|---|
| Attenuation | 30~300 kHz | 3~30 kHZ | Depends on the distance |
| Speed(m/s) | 3 × 108 m/s | - | - |
| Data rate | ~kbps | ~Hundreds bps | ~Gbps |
| Latency | Very low | Very low | Low |
| Distance | ≈10 m | Up to hundreds Kms | ≈3 m |
| Bandwidth | - | - | MHz |
| Frequency band | - | - | - |
| Transmission power | 10−8 W | - | - |
| Antenna size | 0.1m | - | - |
| Performance parameter | Temperature, pressure and salinity | - | - |
| RSS/Sensor Nodes | S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | S10 | S11 | S12 | S13 | SN |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| S1 | 0 | −55.0 | - | −33.1 | −17.66 | - | - | - | - | - | - | - | - | - |
| S2 | −55 | 0 | −46.3 | - | - | - | −37.1 | −42.1 | - | - | - | - | - | - |
| S3 | - | −46.3 | 0 | - | - | - | - | −43 | - | - | - | - | - | - |
| S4 | −32.0 | - | - | 0 | −41 | - | - | - | −44.9 | - | - | - | - | - |
| S5 | −77.6 | - | - | −41 | 0 | −31 | - | - | −55.0 | - | - | - | - | - |
| S6 | - | - | - | - | −30.1 | 0 | - | - | −43 | −40.11 | - | - | - | - |
| S7 | - | −39 | - | - | - | - | 0 | - | - | - | - | −40.01 | −18 | - |
| S8 | - | −42 | −43 | - | - | - | −40.11 | 0 | - | - | - | −33.66 | - | - |
| S9 | - | - | - | - | - | −43 | - | - | 0 | - | - | - | - | −45 |
| S10 | - | - | - | - | - | −40.1 | - | - | - | 0 | - | - | - | −30.99 |
| S11 | - | - | - | - | - | - | - | - | - | - | 0 | - | −37.01 | −45 |
| S12 | - | - | - | - | - | - | −40.01 | −33.88 | - | - | - | 0 | −17 | - |
| S13 | - | - | - | - | - | - | −13.00 | - | - | - | −37.01 | −17 | 0 | −41 |
| SN | - | - | - | - | - | - | - | - | −45 | −30.9 | −45 | - | - | 0 |
| Specification Used | Acoustic | Visible Light |
|---|---|---|
| MCU | ATmega | ATmega |
| Protocol/Interface | Serial | Serial |
| Modulation | BPSK | OOK |
| Operational frequency | 30 KHz | - |
| Communication range | 50 m | 1.5 m |
| Power consumption | 15V, 4.5 Watt | 12V, 2.4 Watt |
| Baud rate | - | 38,400 |
| Dimension | 70 mm × 40 mm | 44 mm × 18 mm |
| Specification | Description of Modem |
|---|---|
| XILINX™ ZYNQ APSoC XC7Z020-CLG484-1 | Dual-core ARM Cortex-A9 MPCore™ with CoreSight, the operation is up 667MHz, NEON™ & Single/Double Precision Floating Point for each processor and 85K Programmable Logic Cells |
| Memory | 512MB DDR3, 256Mb Quad-SPI Flash, Full size SD/MMC card cage and 16GB SD Card (UHS-1) |
| Connection type | 10/100/1000 Ethernet, USB OTG (Device/Host/OTG), USB UART |
| Expansion | 2.54 pitch Box Header, Pmod™ headers (2 × 6) |
| Indicator | User (LEDs-9) |
| Input Toggle Button | Push button switches 7 |
| Analog-to-digital | Xilinx XADC header (4 AD Input)/AD9467 |
| Transducers | [Ultrasonic Transducer] Omni-directional, Its Frequency range: 70/140 kHz [Infrared Diode] TX: 850(±20 nm) nm, RX: 750~1100 nm, Deg: ±60° [Visual Light Diode] TX: 450~460 nm, RX: 430~610 nm, Deg: ±65° |
| Debug/Programming | On-Board USB JTAG programming port and ARM Debug Access Port (DAP) |
| Electrical power source | Battery includes voltage switching function such as 12/16/19Vand the maximum supply in 90 watts |
| Dimension | Length:150(mm)/width:100(mm) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
K M, D.R.; Yum, S.-H.; Ko, E.; Shin, S.-Y.; Namgung, J.-I.; Park, S.-H. Multi-Media and Multi-Band Based Adaptation Layer Techniques for Underwater Sensor Networks. Appl. Sci. 2019, 9, 3187. https://0-doi-org.brum.beds.ac.uk/10.3390/app9153187
K M DR, Yum S-H, Ko E, Shin S-Y, Namgung J-I, Park S-H. Multi-Media and Multi-Band Based Adaptation Layer Techniques for Underwater Sensor Networks. Applied Sciences. 2019; 9(15):3187. https://0-doi-org.brum.beds.ac.uk/10.3390/app9153187
Chicago/Turabian StyleK M, Delphin Raj, Sun-Ho Yum, Eunbi Ko, Soo-Young Shin, Jung-Il Namgung, and Soo-Hyun Park. 2019. "Multi-Media and Multi-Band Based Adaptation Layer Techniques for Underwater Sensor Networks" Applied Sciences 9, no. 15: 3187. https://0-doi-org.brum.beds.ac.uk/10.3390/app9153187