Optimization of EPB Shield Performance with Adaptive Neuro-Fuzzy Inference System and Genetic Algorithm


Abstract
:1. Introduction
2. Methodology
2.1. Adaptive Neuro-Fuzzy Inference System (ANFIS)
2.2. Fuzzy C-means Clustering
2.3. Genetic Algorithm (GA)
- (a)
- Initialization: randomly create a population of n chromosomes and evaluate the effectiveness of each chromosome using the fitness function.
- (b)
- GA operators:
- (i)
- Selection: select the best two chromosomes from the population based on its fitness; using the selected chromosomes as parents for producing offspring, new child chromosomes, and the next generation.
- (ii)
- Crossover: the parent chromosomes intercross randomly with a certain probability and produce the new child (offspring). If the intersection does not occur, the child will be the same as the two parent chromosomes.
- (iii)
- Mutation: this operator is used as a random modification for changing some of the genes inside the chromosomes. By mutation, it is conceivable to adjust the diversity of the population and improve the search capacity to avoid the convergence of the algorithm to local optima.
- (c)
- Evaluation: in this stage, the fitness function usually presents a specific form of the objective function of the optimization problem.
2.4. Multi-Objective Fitness Function
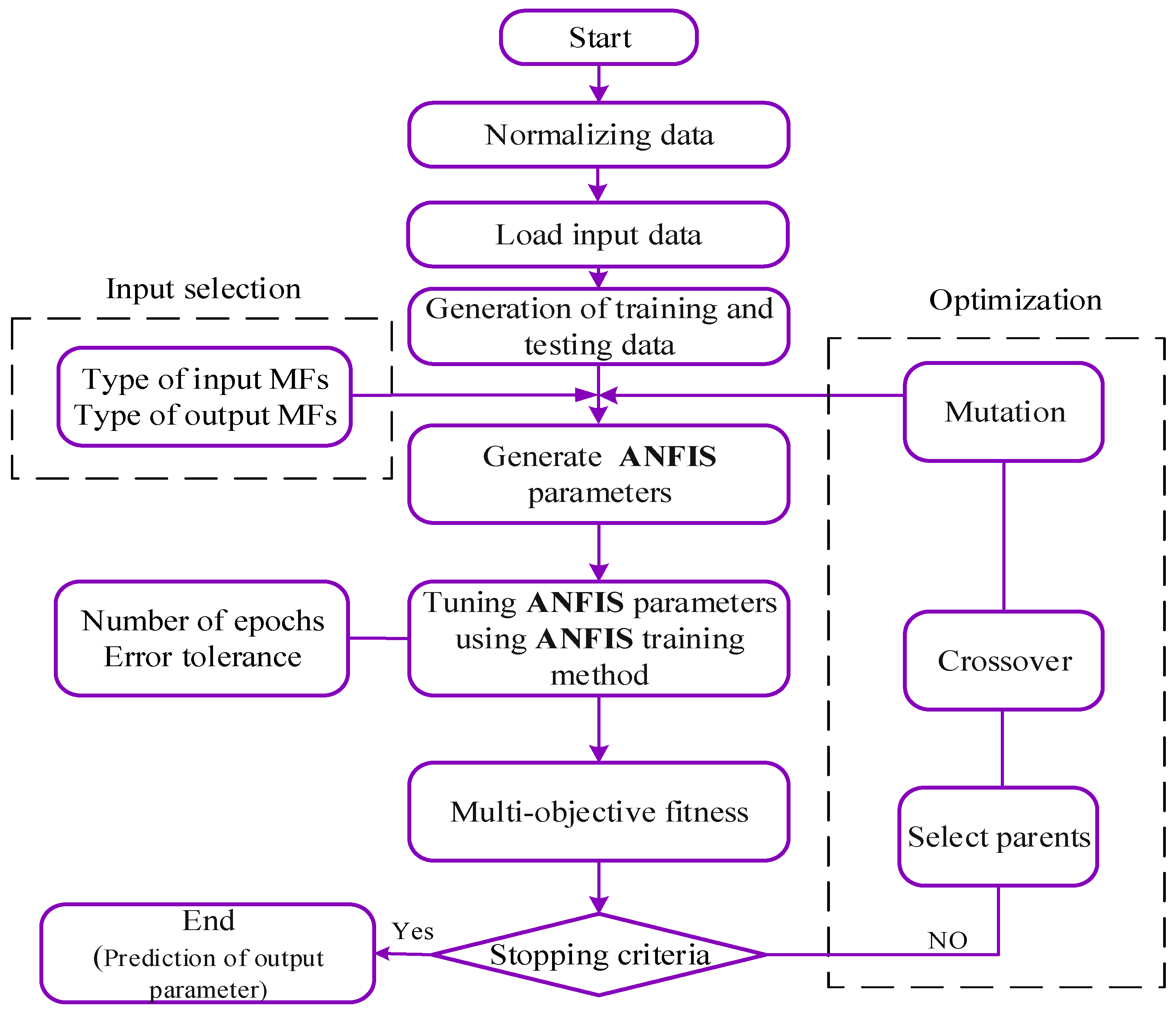
2.5. Integrating ANFIS with GA Model
- Step 1.
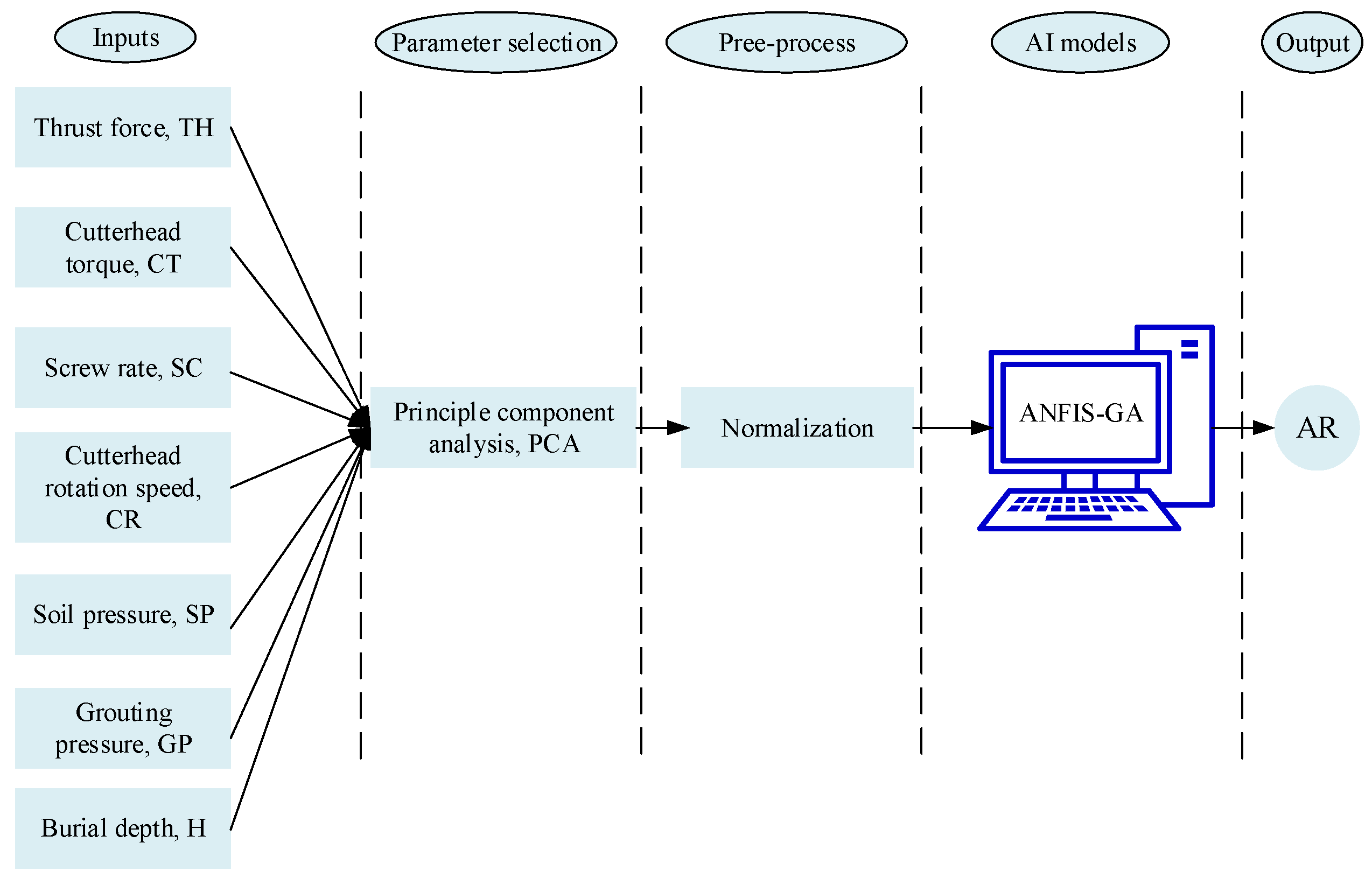
- The first step of the dataflow is to prepare the input parameters (cutter head torque, rotational speed of screw rate, cutter head rotation speed). Then, the corresponding output is set (advance rate).
- Step 2.
- Initializing the Genetic Algorithm. In this step, the population initialization and GA operators are configured.
- Step 3.
- In ANFIS configuration, the training and testing data are defined. The 80 percent of the input database is used for the model’s training and the rest twenty percent is utilized for the model validation.
- Step 4.
- Define the number of membership functions and rules. The algorithm applies the combination of least-squares and the backpropagation method to train the fuzzy inference system and emulate the established dataset.
- Step 5.
- Evaluate the objective function. If the optimum criteria have not been achieved, the selection, crossover, and mutation are applied to define the new population that will be evaluated. If the criteria have been met, the solution is obtained.
3. Processing Database
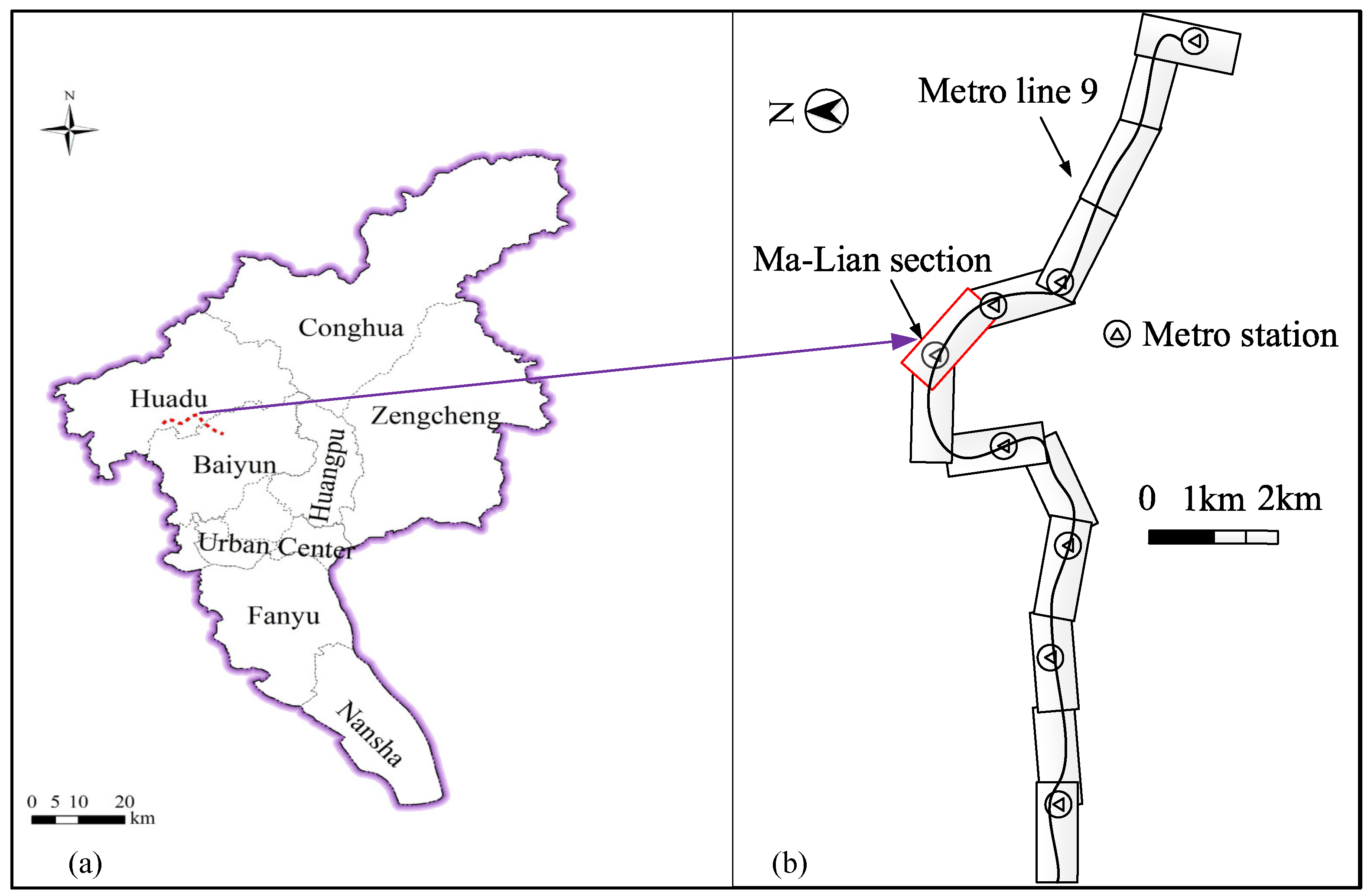
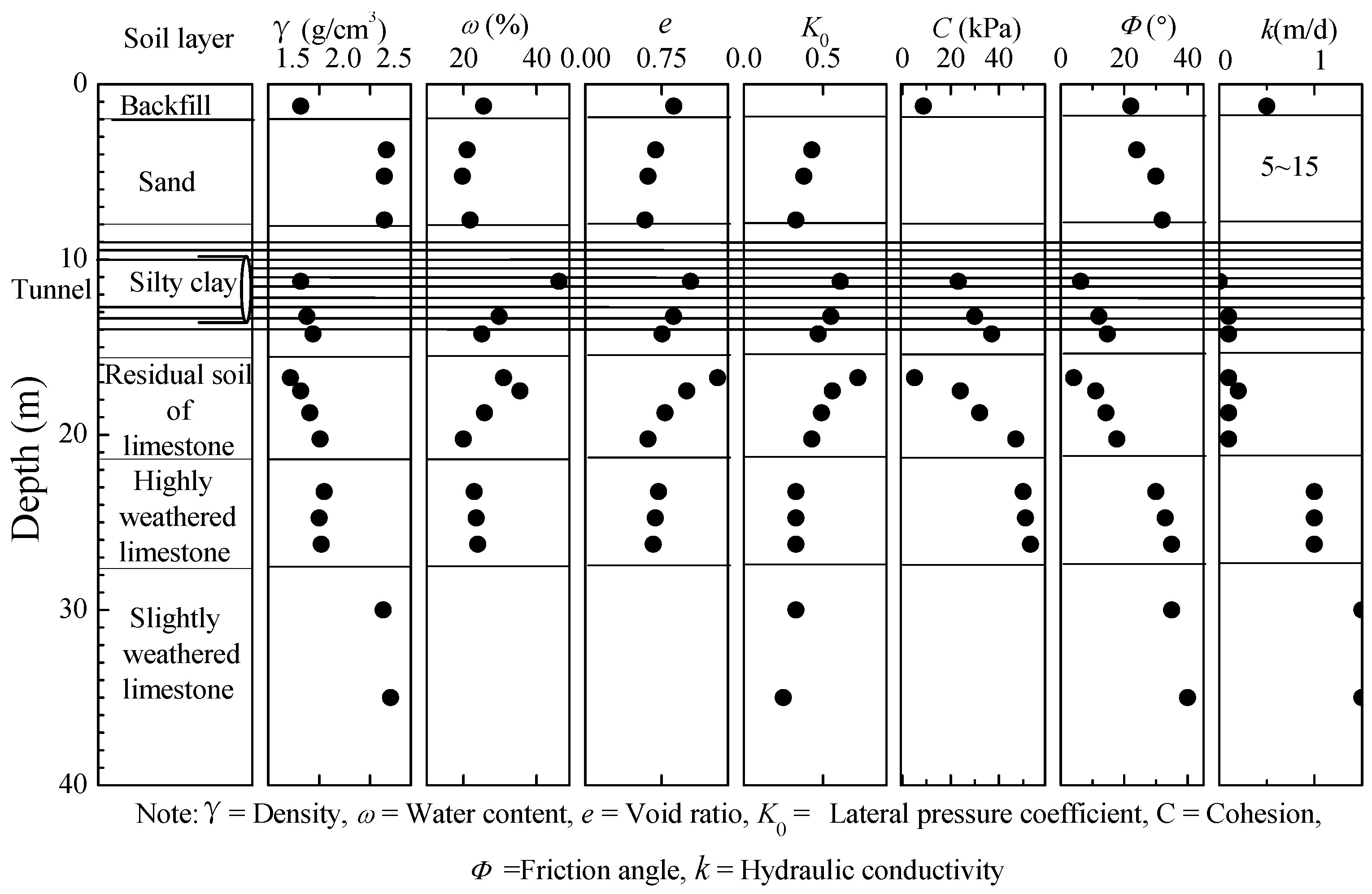
3.1. Project Details
3.2. Shield Performance Database
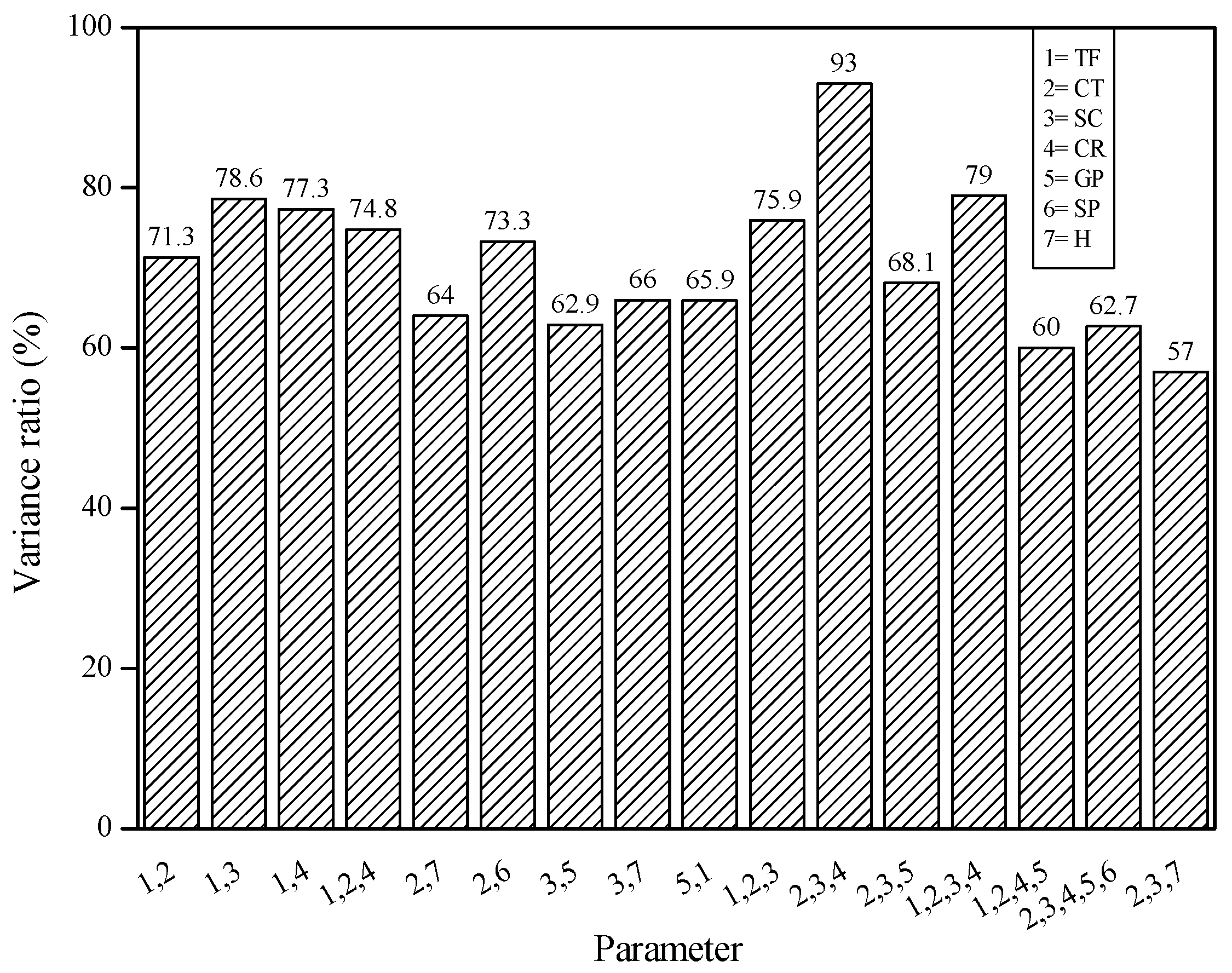
3.3. Principal Component Analysis (PCA)
4. Results and Discussion
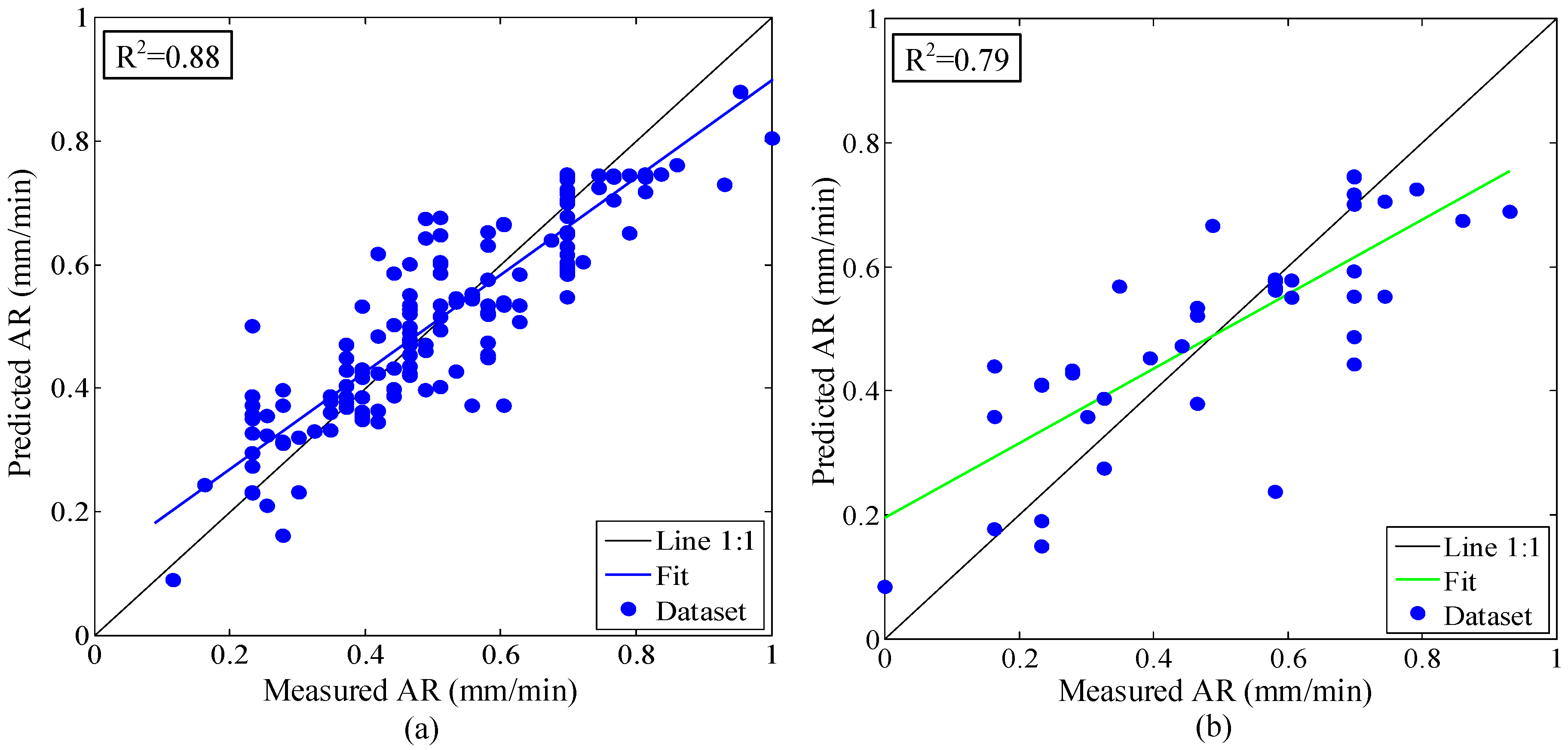
4.1. ANFIS Model
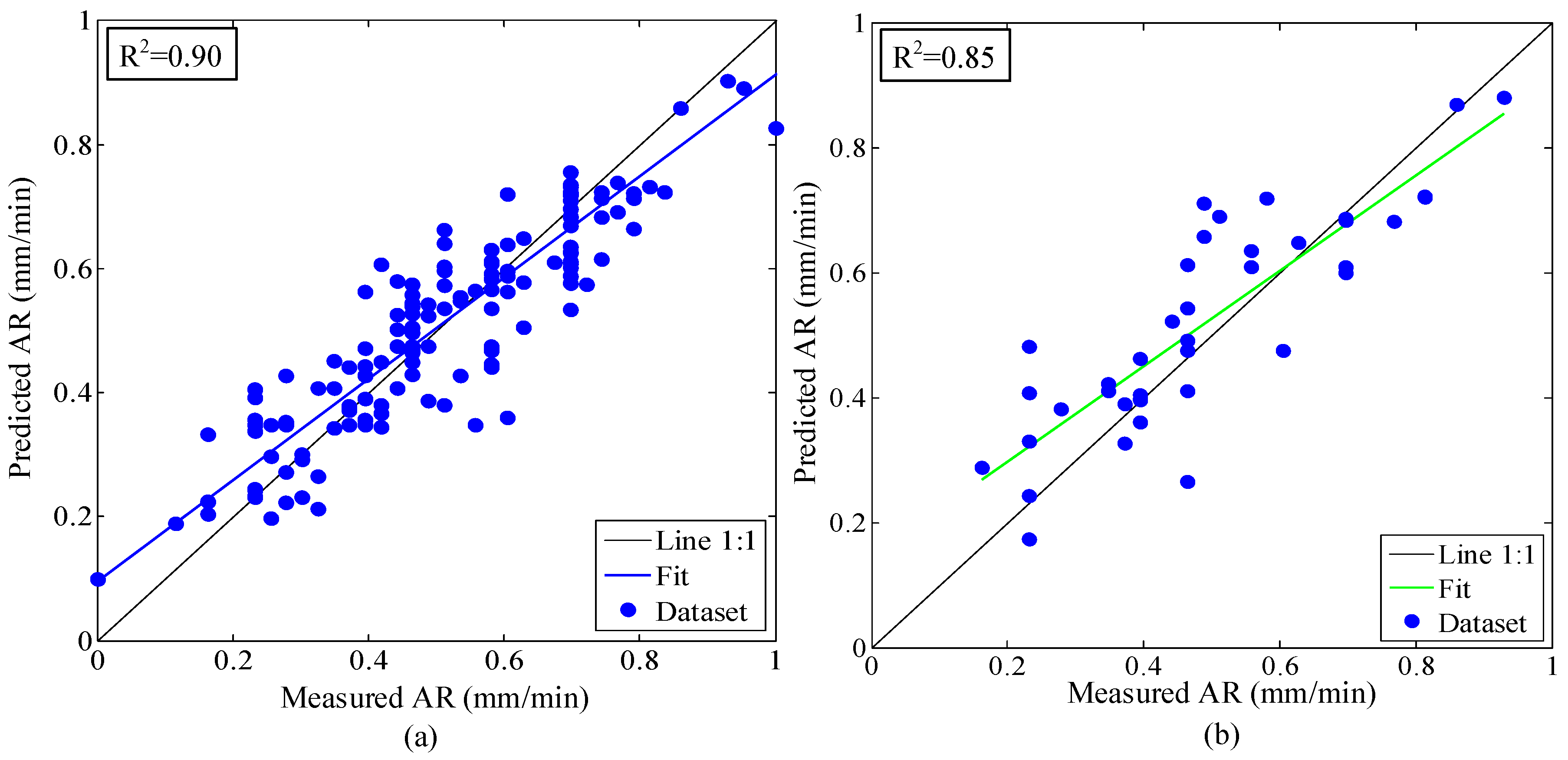
4.2. ANFIS-GA Model
5. Conclusions
- (1)
- Results of principal component statistical analyses illustrated that there was a reasonable relationship between advance rate and three main shield construction parameters including cutterhead torque (CT), rotational speed of screw rate (SC), and cutterhead rotation speed (CR).
- (2)
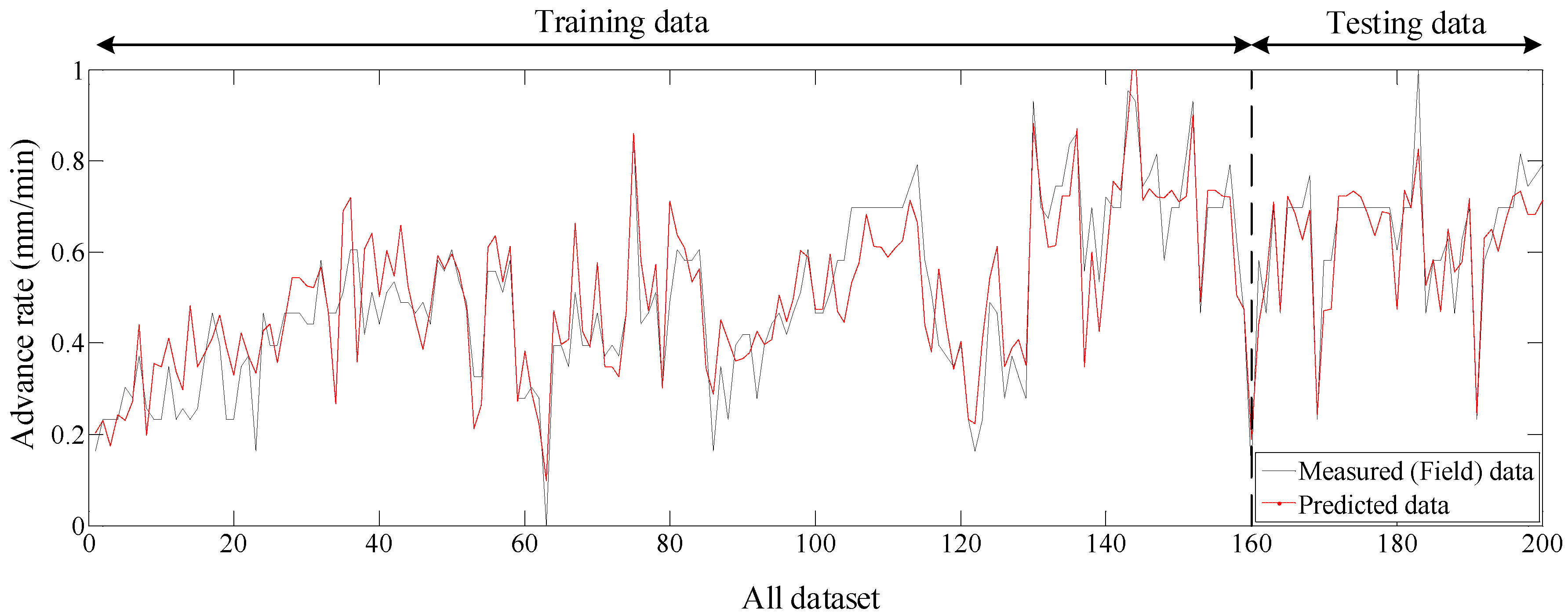
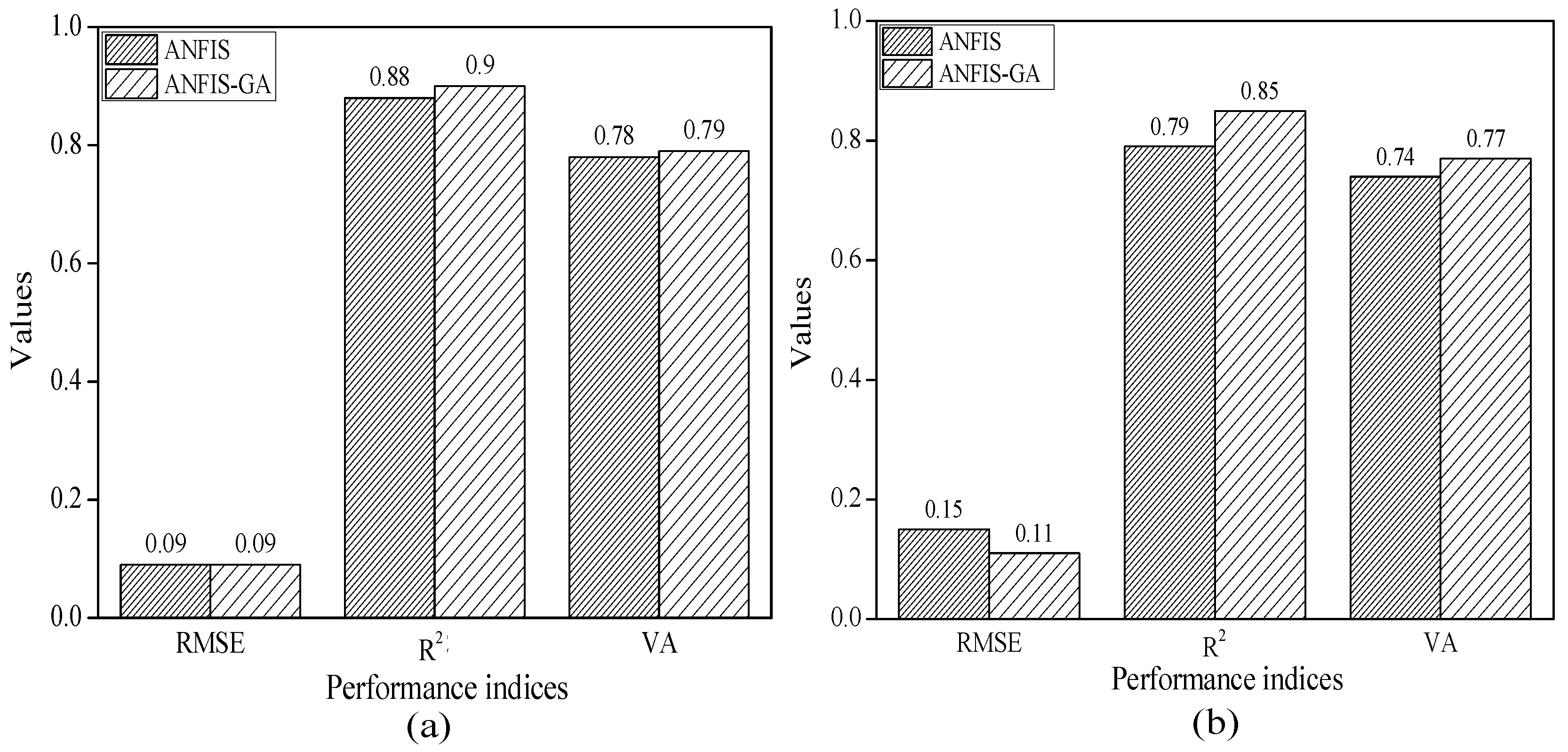
- The Multi-objective optimization model was able to successfully predict the shield performance in terms of advance rate, demonstrating a good agreement with the measured field data for both training set and testing set. The ANFIS-GA model showed better prediction accuracy than the ANFIS model.
- (3)
- The error deviations of the outputs of ANFIS-GA model was in acceptable range ±15%, indicating the more reliability of the proposed model in the prediction of advance rate. Therefore, the hybrid model of shield performances can facilitate decision-makers to accurately predict the project duration and the construction cost, thus supporting the development of efficient construction management plans.
- (4)
- The genetic algorithm was integrated into the process of ANFIS to achieve the optimal solution for ANFIS technique. This was achieved by simultaneously optimizing the ANFIS performance based on the multi-objective fitness function. The findings illustrated that the hybrid ANFIS–GA provides the promised accuracy with an acceptable interpretation in classification problems. It was difficult to find simpler structures based on satisfactory accuracy and a single optimal algorithm offering the best accuracy for all datasets. However, the algorithm that can lead to a fall balance in accuracy and portability will be more adaptable to real applications. Thus, problems based on this approach are the subject of further work.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Liu, X.X.; Shen, S.L.; Xu, Y.S.; Yin, Z.Y. Analytical approach for time-dependent groundwater inflow into shield tunnel face in confined aquifer. Int. J. Numer. Anal. Methods Geomech. 2018, 42, 655–673. [Google Scholar] [CrossRef]
- Liu, X.X.; Shen, S.L.; Zhou, A.N.; Xu, Y.S. Evaluation of foam conditioning effect on groundwater inflow at tunnel cutting face. Int. J. Numer. Anal. Methods Geomech. 2019, 43, 463–481. [Google Scholar] [CrossRef]
- Lyu, H.M.; Sun, W.J.; Shen, S.L.; Arulrajah, A. Flood risk assessment in metro systems of mega-cities using a GIS-based modeling approach. Sci. Total Environ. 2018, 626, 1012–1025. [Google Scholar] [CrossRef] [PubMed]
- Lyu, H.M.; Shen, S.L.; Zhou, A.N.; Yang, J. Perspectives for flood risk assessment and management for mega-city metro system. Tunn. Undergr. Space Technol. 2019, 84, 31–44. [Google Scholar] [CrossRef]
- Bilgin, N. An appraisal of TBM performances in Turkey in difficult ground conditions and some recommendations. Tunn. Undergr. Space Technol. 2016, 57, 265–276. [Google Scholar] [CrossRef]
- Lyu, H.M.; Wang, G.F.; Cheng, W.C.; Shen, S.L. Tornado hazards on June 23rd in Jiangsu Province, China: Preliminary investigation and analysis. Nat. Hazard 2017, 85, 597–604. [Google Scholar] [CrossRef]
- Lyu, H.M.; Shen, S.L.; Arulrajah, A. Assessment of geohazards and preventive countermeasures using AHP incorporated with GIS in Lanzhou, China. Sustainability 2018, 10, 304. [Google Scholar] [CrossRef]
- Zhang, Z.; Aqeel, M.; Li, C.; Sun, F. Theoretical prediction of wear of disc cutters in tunnel boring machine and its application. J. Rock Mech. Geotech. Eng. 2019, 11, 111–120. [Google Scholar] [CrossRef]
- Elbaz, K.; Shen, S.L.; Arulrajah, A.; Horpibulsuk, S. Geohazards induced by anthropic activities of geoconstruction: A review of recent failure cases. Arab. J. Geosci. 2016, 9, 708. [Google Scholar] [CrossRef]
- Shen, S.L.; Wu, Y.X.; Misra, A. Calculation of head difference at two sides of a cut-off barrier during excavation dewatering. Comput. Geotech. 2017, 91, 192–202. [Google Scholar] [CrossRef]
- Tan, Y.; Lu, Y. Responses of shallowly buried pipelines to adjacent deep excavations in Shanghai soft ground. J. Pipeline Syst. Eng. Pract. 2018, 9, 05018002. [Google Scholar] [CrossRef]
- Xu, Y.S.; Shen, S.L.; Lai, Y.; Zhou, A.N. Design of Sponge City: Lessons learnt from an ancient drainage system in Ganzhou, China. J. Hydrol. 2018, 563, 900–908. [Google Scholar] [CrossRef]
- Xu, Y.S.; Shen, J.S.; Wu, H.N.; Zhang, N. Risk and impacts on the environment of free-phase biogas in Quaternary deposits along the coastal region of Shanghai. Ocean Eng. 2017, 137, 129–137. [Google Scholar] [CrossRef]
- Xu, Y.S.; Shen, S.L.; Ma, L.; Sun, W.J.; Yin, Z.Y. Evaluation of the blocking effect of retaining walls on groundwater seepage in aquifers with different insertion depths. Eng. Geol. 2014, 183, 254–264. [Google Scholar] [CrossRef]
- Wu, Y.X.; Shen, J.S.; Cheng, W.C.; Hino, T. Semi-analytical solution to pumping test data with barrier, wellbore storage, and partial penetration effects. Eng. Geol. 2017, 226, 44–51. [Google Scholar] [CrossRef]
- Shen, S.L.; Wu, H.N.; Cui, Y.J.; Yin, Z.Y. Long-term settlement behavior of metro tunnels in the soft deposits of Shanghai. Tunn. Undergr. Space Technol. 2014, 40, 309–323. [Google Scholar] [CrossRef]
- Shen, S.L.; Cui, Q.L.; Ho, C.E.; Xu, Y.S. Ground response to multiple parallel microtunneling operations in cemented silty clay and sand. J. Geotech. Geoenviron. Eng. 2016, 142, 04016001. [Google Scholar] [CrossRef]
- Wu, H.N.; Shen, S.L.; Liao, S.M.; Yin, Z.Y. Longitudinal structural modelling of shield tunnels considering shearing dislocation between segmental rings. Tunn. Undergr. Space Technol. 2015, 50, 317–323. [Google Scholar] [CrossRef]
- Wu, Y.X.; Shen, S.L.; Yuan, D.J. Characteristics of dewatering induced drawdown curve under blocking effect of retaining wall in aquifer. J. Hydrol. 2016, 539, 554–566. [Google Scholar] [CrossRef]
- Rostami, J. Performance prediction of hard rock tunnel boring machines (TBMs) in difficult grounds. Tunn. Undergr. Space Technol. 2016, 56, 173–182. [Google Scholar] [CrossRef]
- Khandelwal, M.; Shirani, R.; Masoud, F. Function development for appraising brittleness of intact rocks using genetic programming and non-linear multiple regression models. Eng. Comput. 2017, 33, 13–21. [Google Scholar] [CrossRef]
- Xie, X.; Wang, Q.; Huang, Z. Parametric analysis of mixshield tunnelling in mixed ground containing mudstone and protection of adjacent buildings: Case study in Nanning metro containing mudstone and protection of adjacent buildings. Eur. J. Environ. Civ. Eng. 2017, 22, s130–s148. [Google Scholar] [CrossRef]
- Salimi, A.; Rostami, J.; Moormann, C. Evaluating the Suitability of Existing Rock Mass Classification Systems for TBM Performance Prediction by using a Regression Tree. Procedia Eng. 2017, 191, 299–309. [Google Scholar] [CrossRef]
- Amoun, S.; Sharifzadeh, M.; Shahriar, K.; Rostami, J.; Tarigh, S. Evaluation of tool wear in EPB tunnelling of Tehran Metro, Line 7 Expansion. Tunn. Undergr. Space Technol. 2017, 61, 233–246. [Google Scholar] [CrossRef]
- Ren, D.J.; Shen, S.L.; Arulrajah, A.; Wu, H.N. Evaluation of ground loss ratio with moving trajectories induced in double-O-tube (DOT) tunnelling. Can. Geotech. J. 2018, 55, 894–902. [Google Scholar] [CrossRef]
- Wu, Y.X.; Lyu, H.M.; Han, J.; Shen, S.L. Case study: Dewatering-induced building settlement around a deep excavation in the soft deposit of Tianjin, China. J. Geotech. Geoenviron. Eng. ASCE 2019. [Google Scholar] [CrossRef]
- Salimi, A.; Faradonbeh, R.S.; Monjezi, M.; Moormann, C. TBM performance estimation using a classification and regression tree (CART) technique. Bull. Eng. Geol. Environ. 2016, 77, 429–440. [Google Scholar] [CrossRef]
- Hasanipanah, M.; Shahnazar, A.; Arab, H.; Golzar, S.B.; Amiri, M. Developing a new hybrid-AI model to predict blast-induced Backbreak. Eng. Comput. 2017, 33, 349–359. [Google Scholar] [CrossRef]
- Jahed Armaghani, D.; Tonnizam, E.; Sundaram, M.; Narita, N.; Yagiz, S. Development of hybrid intelligent models for predicting TBM penetration rate in hard rock condition. Tunn. Undergr. Space Technol. 2017, 63, 29–43. [Google Scholar] [CrossRef]
- Yin, Z.Y.; Jin, Y.F.; Shen, J.S.; Hicher, P.Y. Optimization techniques for identifying soil parameters in geotechnical engineering: Comparative study and enhancement. Int. J. Numer. Anal. Methods Geomech. 2018, 42, 70–94. [Google Scholar] [CrossRef]
- Yin, Z.Y.; Wu, Z.Y.; Hicher, P.Y. Modeling the monotonic and cyclic behavior of granular materials by an exponential constitutive function. J. Eng. Mech. ASCE 2018, 144, 04018014. [Google Scholar] [CrossRef]
- Rini, D.P.; Shamsuddin, S.M.; Yuhaniz, S.S. Particle swarm optimization for ANFIS interpretability and accuracy. Soft Comput. 2016, 20, 251–262. [Google Scholar] [CrossRef]
- Kahraman, S. Estimating the penetration rate in diamond drilling in laboratory works using the regression and artificial neural network analysis. Neural Process Lett. 2016, 43, 523–535. [Google Scholar] [CrossRef]
- Ocak, I.; Evren, S.; Rostami, J. Performance prediction of impact hammer using ensemble machine learning techniques. Tunn. Undergr. Space Technol. 2018, 80, 269–276. [Google Scholar] [CrossRef]
- Stypulkowski, J.B.; Bernardeau, F.G.; Jakubowski, J. Descriptive statistical analysis of TBM performance at Abu Hamour Tunnel Phase I. Arab. J. Geosci. 2018, 11, 191. [Google Scholar] [CrossRef]
- Acaroglu, O. Prediction of thrust and torque requirements of TBMs with fuzzy logic models. Tunn. Undergr. Space Technol. 2011, 26, 267–275. [Google Scholar] [CrossRef]
- Liu, K.; Liu, B. Optimization of smooth blasting parameters for mountain tunnel construction with specified control indices based on a GA and ISVR coupling algorithm. Tunn. Undergr. Space Technol. 2017, 70, 363–374. [Google Scholar] [CrossRef]
- Babak, S.; Anemangely, M.; Sabah, M. Application of hybrid artificial neural networks for predicting rate of penetration (ROP): A case study from Marun oil field. J. Pet. Sci. Eng. 2019, 175, 604–623. [Google Scholar]
- Bouayad, D.; Emeriault, F. Modeling the relationship between ground surface settlements induced by shield tunneling and the operational and geological parameters based on the hybrid PCA/ANFIS method. Tunn. Undergr. Space Technol. 2017, 68, 142–152. [Google Scholar] [CrossRef]
- Mottahedi, A.; Sereshki, F.; Ataei, M. Development of over break prediction models in drill and blast tunneling using soft computing methods. Eng. Comput. 2017, 34, 45–58. [Google Scholar] [CrossRef]
- Minh, V.T.; Katushin, D.; Antonov, M.; Veinthal, R. Regression Models and Fuzzy Logic Prediction of TBM Penetration Rate. Open Eng. 2017, 7, 60–68. [Google Scholar] [CrossRef]
- Salimi, A.; Rostami, J.; Moormann, C.; Delisio, A. Application of non-linear regression analysis and artificial intelligence algorithms for performance prediction of hard rock TBMs. Tunn. Undergr. Space Technol. 2016, 58, 236–246. [Google Scholar] [CrossRef]
- Murlidhar, B.R.; Ahmed, M.; Mavaluru, D.; Siddiqi, A.F.; Mohamad, E.T. Prediction of rock interlocking by developing two hybrid models based on GA and fuzzy system. Eng. Comput. 2018. [Google Scholar] [CrossRef]
- Jang, J.S.R. ANFIS: Adaptive-network-based fuzzy inference systems. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Suganya, R.; Shanthi, R. Fuzzy C-means algorithm—A review. Int. J. Sci. Res. Publ. 2012, 2, 1–3. [Google Scholar]
- Jalalkamali, A. Using of hybrid fuzzy models to predict spatiotemporal groundwater quality parameters. Earth Sci. Inf. 2015, 8, 885–894. [Google Scholar] [CrossRef]
- Papon, A.; Riou, Y.; Dano, C.; Hicher, P.Y. Single-and multi-objective genetic algorithm optimization for identifying soil parameters. Int. J. Numer. Anal. Methods Geomech. 2012, 36, 597–618. [Google Scholar] [CrossRef]
- Ismail, F.S.; Yusof, R. A new self organizing multi-objective optimization method. In Proceedings of the IEEE International Conference on Systems Man & Cybernetics, Istanbul, Turkey, 10–13 October 2010; pp. 1016–1021. [Google Scholar]
- Elbaz, K.; Shen, S.L.; Cheng, W.C.; Arulrajah, A. Cutter-disc consumption during earth-pressure-balance tunnelling in mixed strata. Proc. Inst. Civ. Eng. Geotech. Eng. 2018, 171, 363–376. [Google Scholar] [CrossRef]
- Elbaz, K.; Shen, S.L.; Tan, Y.; Cheng, W.C. Investigation into performance of deep excavation in sand covered karst: A case report. Soils Found. 2018, 58, 1042–1058. [Google Scholar] [CrossRef]
- Ren, D.J.; Shen, S.L.; Arulrajah, A.; Cheng, W.C. Prediction model of TBM disc cutter wear during tunnelling in heterogeneous ground. Rock Mech. Rock Eng. 2018, 51, 3599–3611. [Google Scholar] [CrossRef]
- Salimi, A.; Rostami, J.; Moormann, C.; Hassanpour, J. Examining Feasibility of Developing a Rock Mass Classification for Hard Rock TBM Application Using Non-linear Regression, Regression Tree and Generic Programming. Geotech. Geol. Eng. 2018, 36, 1145–1159. [Google Scholar] [CrossRef]
- Khamesi, H.; Torabi, S.; Mirzaei-Nasirabad, H.; Ghadiri, Z. Improving the performance of intelligent back analysis for tunneling using optimized fuzzy systems: Case study of the Karaj Subway Line 2 in Iran. J. Comput. Civ. Eng. 2015, 29, 05014010. [Google Scholar] [CrossRef]
- Swingler, K. Applying Neural Networks: A Practical Guide; Academic: New York, NY, USA, 1996; p. 442. [Google Scholar]
- Rezakazemi, M.; Ghafarinazari, A.; Shirazian, S.; Khoshsima, A. Numerical modeling and optimization of wastewater treatment using porous polymeric membranes. Polym. Eng. Sci. 2013, 53, 1272–1278. [Google Scholar] [CrossRef]
- Jin, Y.F.; Yin, Z.Y.; Zhou, W.H.; Huang, H.W. Engineering Applications of Artificial Intelligence Multi-objective optimization-based updating of predictions during excavation. Eng. Appl. Artif. Intell. 2019, 78, 102–123. [Google Scholar] [CrossRef]
- Cheng, W.C.; Ni, J.C.; Shen, S.L. Experimental and analytical modeling of shield segment under cyclic loading. Int. J. Geomech. ASCE 2017, 17, 04016146. [Google Scholar] [CrossRef]
- Zeng, C.F.; Zheng, G.; Xue, X.L.; Mei, G.X. Combined recharge: A method to prevent ground settlement induced by redevelopment of recharge wells. J. Hydrol. 2019, 568, 1–11. [Google Scholar] [CrossRef]
- Xu, Y.S.; Shen, S.L.; Ren, D.J.; Wu, H.N. Analysis of factors in land subsidence in Shanghai: A view based on Strategic Environmental Assessment. Sustainability 2016, 8, 573. [Google Scholar] [CrossRef]
- Zeng, C.F.; Xue, X.L.; Zheng, G.; Xue, T.Y.; Mei, G.X. Responses of retaining wall and surrounding ground to pre-excavation dewatering in an alternated multi-aquifer-aquitard system. J. Hydrol. 2018, 559, 609–626. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Shield Type | EPB |
|---|---|
| External diameter (m) | 6.25 |
| Inner diameter for lining (m) | 5.40 |
| Outer diameter for lining (m) | 6.0 |
| Shield length (m) | 8.90 |
| Cutterhead power (kW) | 600 |
| Number of cutters: Disc cutter Scraper Ripper | 40 52 20 |
| Disc cutter diameter (mm) | 432 |
| Shield weight (kN) | Approximately 3000 |
| Parameter | Unit | Category | Min. | Max. | Mean |
|---|---|---|---|---|---|
| Thrust force (TF) | kN | Input | 5600 | 11,405 | 8821.18 |
| Cutter head torque (CT) | MN.m | Input | 1 | 4 | 1.588 |
| Rotational speed of screw rate (SC) | RPM | Input | 5 | 15.5 | 9.768 |
| Cutter head rotation speed (CR) | RPM | Input | 0.9 | 1.5 | 1.211 |
| Grouting pressure (GP) | kPa | Input | 100 | 300 | 188.95 |
| Soil pressure (SP) | kPa | Input | 113.33 | 223.33 | 151.4 |
| Burial depth (H) | m | Input | 7.1 | 9.38 | 8.19 |
| Advance rate (AR) | mm/min | Output | 20 | 63 | 42.25 |
| ANFIS Parameter Type | Characteristic/Value |
|---|---|
| Membership function (MF) type | Gaussian |
| Fuzzy structure | Takagi-Sugeno-type |
| Output MF | Linear |
| Number of fuzzy rules | 8 |
| Number of Epoch in ANFIS | 200 |
| Minimum Improvement | 1 × 10−5 |
| Type of initial fuzzy inference system | Genfis 3 |
| Initial step size | 0.01 |
| Step size decrease rate | 0.9 |
| Step size increase rate | 1.1 |
| Number of training data pairs | 160 |
| Number of testing data pairs | 40 |
| Training method | GA |
| Maximum number of generations | 1000 |
| Model | Number of Data | Relative Deviation |
|---|---|---|
| Training data | 160 | ±15% |
| Testing data | 40 | ±15% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elbaz, K.; Shen, S.-L.; Zhou, A.; Yuan, D.-J.; Xu, Y.-S. Optimization of EPB Shield Performance with Adaptive Neuro-Fuzzy Inference System and Genetic Algorithm. Appl. Sci. 2019, 9, 780. https://0-doi-org.brum.beds.ac.uk/10.3390/app9040780
Elbaz K, Shen S-L, Zhou A, Yuan D-J, Xu Y-S. Optimization of EPB Shield Performance with Adaptive Neuro-Fuzzy Inference System and Genetic Algorithm. Applied Sciences. 2019; 9(4):780. https://0-doi-org.brum.beds.ac.uk/10.3390/app9040780
Chicago/Turabian StyleElbaz, Khalid, Shui-Long Shen, Annan Zhou, Da-Jun Yuan, and Ye-Shuang Xu. 2019. "Optimization of EPB Shield Performance with Adaptive Neuro-Fuzzy Inference System and Genetic Algorithm" Applied Sciences 9, no. 4: 780. https://0-doi-org.brum.beds.ac.uk/10.3390/app9040780