Quality Evaluation of Potato Tubers Using Neural Image Analysis Method

 , , , , and
, , , , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
- Box pallets (120 × 160 × 125 cm), about 1200 kg) of the Dutch type;
- Storage height up to 5 m;
- Storage compartment with a chimney ventilation system;
- Humidity 88%–97%;
- Temperature 5.5–6.5 °C.
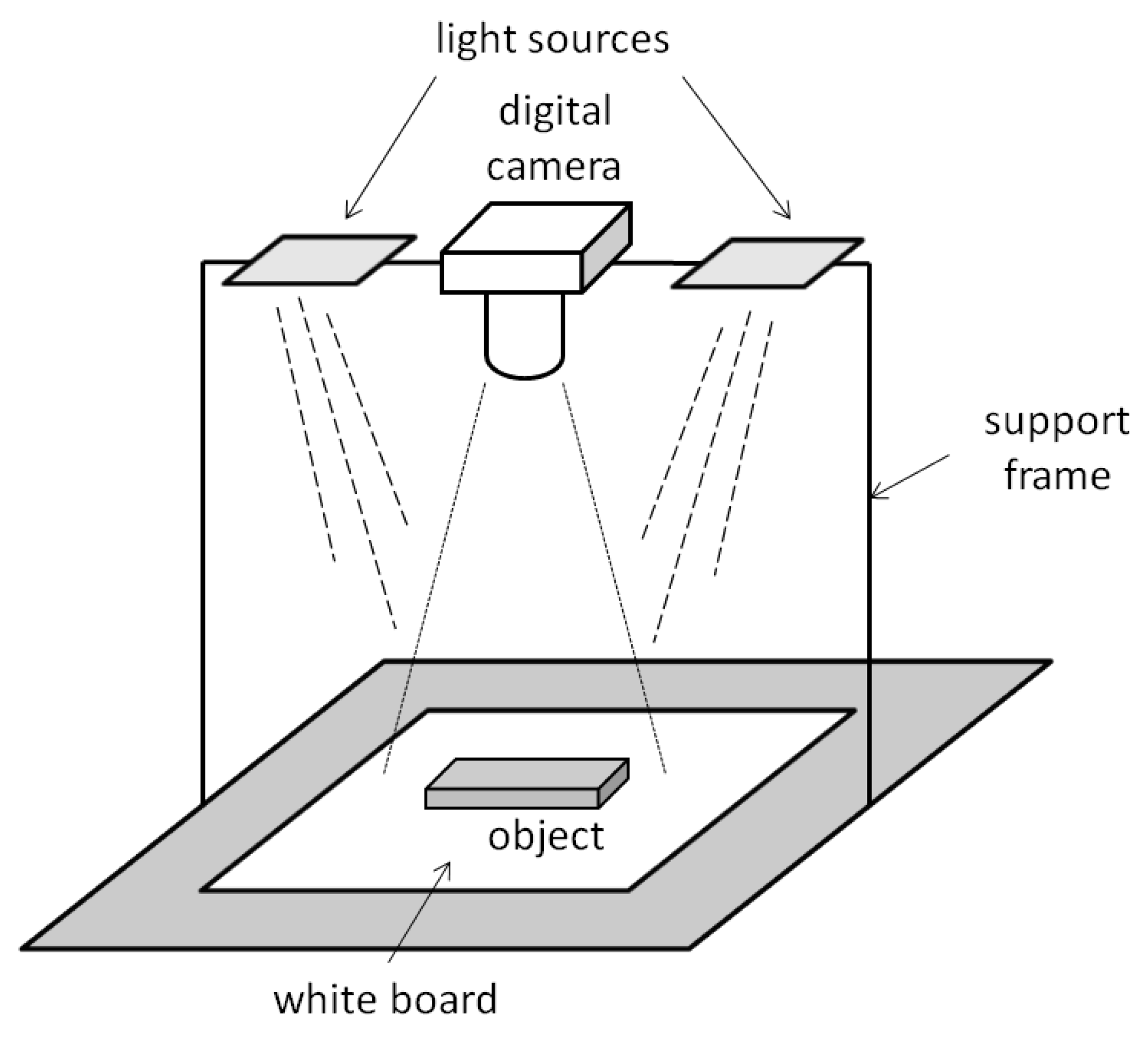
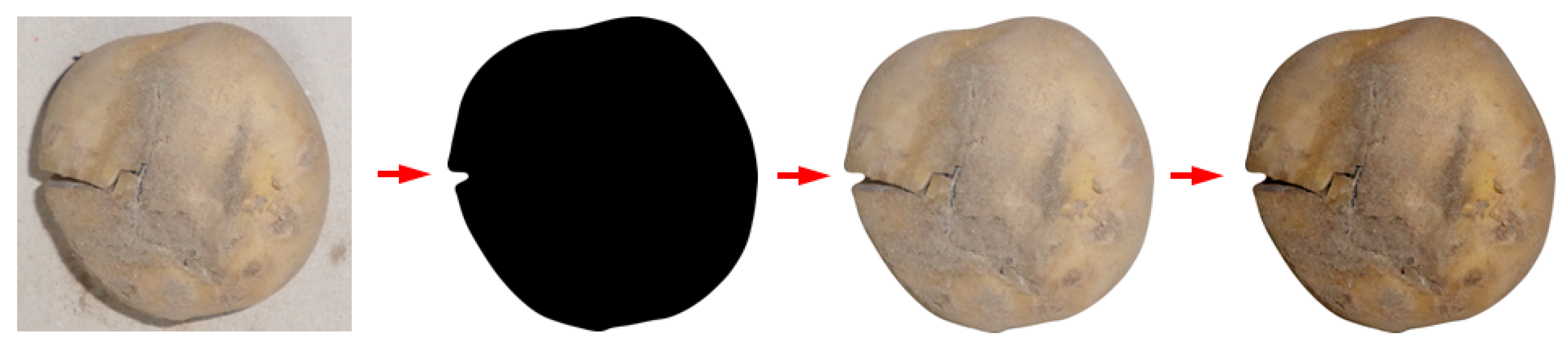
2.2. Methods
- Diameter 1 (the largest diameter of the object vertically);
- Diameter 2 (largest object diameter horizontally);
- Surface area (sum of pixels in the highlighted object);
- Circumference (the number of pixels at the edge of the object).
- Dimensionless shape coefficient, where L is the circuit and S is the area
- Feret coefficient, where: represents the maximum horizontal length and represents the maximum vertical length
- Regularity coefficient
- Circulation coefficient 1
- Circulation coefficient 2
- Malinowska coefficient
- Contrast (local variations in the gray-level co-occurrence matrix);
- Correlation (joint probability occurrence of the specified pixel pairs);
- Energy (sum of squared elements in the GLCM);
- Homogeneity (closeness of the distribution of elements in the GLCM to the GLCM diagonal).
- Saturation mean;
- Saturation median;
- Saturation standard deviation;
- Saturation mean without black color;
- Saturation median without black color;
- Saturation standard deviation without black color;
- Luminance mean;
- Luminance median;
- Luminance standard deviation;
- Luminance mean without black color;
- Luminance median without black color;
- Luminance standard deviation without black color;
- Red channel mean;
- Red channel median;
- Red channel standard deviation;
- Red channel mean without black color;
- Red channel median without black color;
- Red channel standard deviation without black color;
- Green channel mean;
- Green channel median;
- Green channel standard deviation;
- Green channel mean without black color;
- Green channel median without black color;
- Green channel standard deviation without black color;
- Blue channel mean;
- Blue channel median;
- Blue channel standard deviation;
- Blue channel mean without black color;
- Blue channel median without black color;
- Blue channel standard deviation without black color.
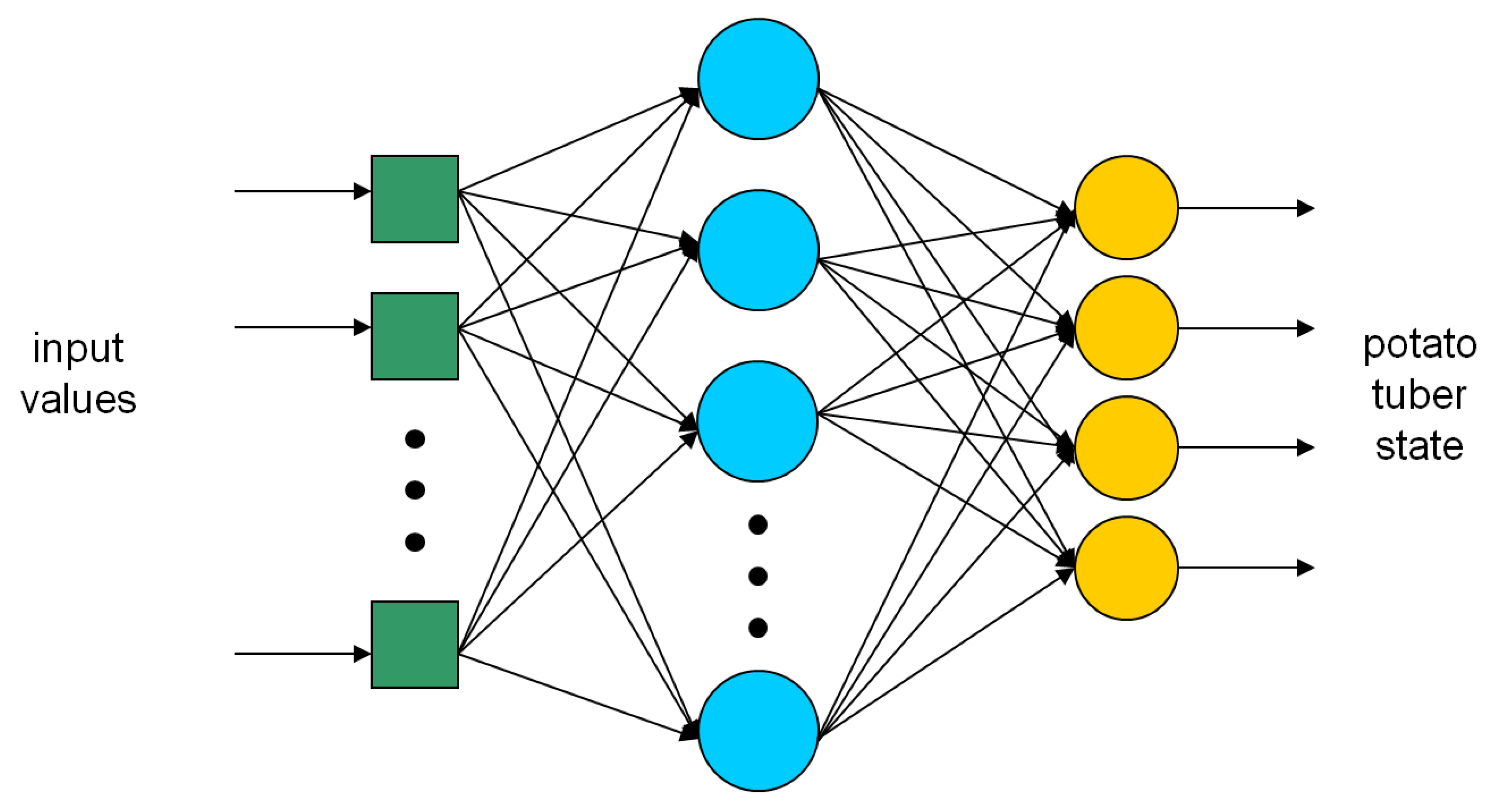
- Tuber without any visible damage;
- Tuber with visible mechanical damage;
- Green tuber (too high concentration of solanine);
- Rotten tuber / tuber infected with fungal disease.
3. Results and Discussion
- Red channel standard deviation (rivs1);
- Red channel standard deviation without black color (rivs2);
- Green channel median (rivs3);
- Green channel standard deviation (rivs4);
- Green channel median without black color (rivs5);
- Green channel standard deviation without black color (rivs6);
- Blue channel standard deviation (rivs7);
- Blue channel standard deviation without black color (rivs8).
4. Conclusions
- The proposed set of representative features, based on the selected statistical parameters of the RGB color model of potato tubers images, proved to be adequate in the process of identifying and classifying selected lesions.
- Among the generated neural models, the best-performing classification system with the highest test quality was a three-layer perceptron with an 8–13–4 layer structure.
- The proposed and tested method allowed for a fast and non-invasive assessment of potato tubers, with high accuracy (up to 92%).
- The research showed the utilitarian aspect of the developed model, supporting the decision-making process in the process of storing and sorting potato tubers, that can be further implemented in mobile devices.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, F.; Jiang, X.; Sun, M.; Xu, H.L.; Shi, L.; Shan, W.; Feng, Y. Screening of culture conditions for pathogens of potato dry rot. J. Acta Agric. Scand. Sect. B Soil Plant Sci. 2014, 64, 694–699. [Google Scholar] [CrossRef]
- Lombardo, S.; Pandino, G.; Mauromicale, G. The effect on tuber quality of an organic versus a conventional cultivation system in the early crop potato. J. Food Compos. Anal. 2017, 62, 189–196. [Google Scholar] [CrossRef]
- Lakesh, K.S.; Sukhwinder, K.B.; Dwyer, J.D.; Plant, A.B.; Bhowmik, A. A case study of improving yield prediction and sulfur deficiency detection using optical sensors and relationship of historical potato yield with weather data in Maine. Sensors 2017, 17, 1095. [Google Scholar] [CrossRef] [Green Version]
- Bentini, M.; Caprara, C.; Martelli, R. Physico-mechanical properties of potato tubers during cold storage. Biosyst. Eng. 2009, 104, 25–32. [Google Scholar] [CrossRef]
- Jensen, P.; Nielsen, B. Development of potato late blight (Phytophthora infestans) in differently developed potato crops and the potential to graduate the fungicide dose according to crop biomass. J. Acta Agric. Scand. Sect. B Soil Plant Sci. 2015, 65, 667–672. [Google Scholar] [CrossRef]
- Marks, N.; Lipiec, J.; Jakubowski, T. Ocena przydatności metod fizycznych do zwalczania przechowalniczych chorób bulw ziemniaka. Inż. Rol. 2005, 7, 169–175. [Google Scholar]
- Jakubowski, T.; Królczyk, J.B. Method for the Reduction of Natural Losses of Potato Tubers during their Long-Term Storage. Sustainability 2020, 12, 1048. [Google Scholar] [CrossRef] [Green Version]
- Boniecki, P.; Piekarska-Boniecka, H.; Koszela, K.; Zaborowicz, M.; Przybył, K.; Wojcieszak, W.; Zbytek, Z.; Ludwiczak, A.; Przybylak, A.; Lewicki, A. Neural Classifier in the Estimation Process of Maturity of Selected Varieties of Apples. In Proceedings of the Seventh International Conference on Digital Image Processing (ICDIP 2015), Los Angeles, CA, USA, 9–10 April 2015. [Google Scholar] [CrossRef]
- El-Sanhoty, R.; Shahwan, T.; Fawzy, M.R. Application of artificial neural networks to develop a classification model between genetically modified maize (Bt-176) and conventional maize by applying lipid analysis data. J. Food Compos. Anal. 2006, 19, 628–636. [Google Scholar] [CrossRef]
- Zaborowicz, M.; Boniecki, P.; Koszela, K.; Przybylak, A.; Przybył, J. Application of neural image analysis in evaluating the quality of greenhouse tomatoes. Sci. Hortic. 2017, 218, 222–229. [Google Scholar] [CrossRef]
- Przybylak, A.; Boniecki, P.; Koszela, K.; Ludwiczak, A.; Zaborowicz, M.; Lisiak, D.; Stanisz, M.; Ślósarz, P. Estimation of intramuscular level of marbling among Whiteheaded Mutton Sheep lambs. J. Food Eng. 2016, 168, 199–204. [Google Scholar] [CrossRef]
- Yang, Y.S.; Chang, C.H.; Wu, C.L. Damage indexing method for shear critical tubular reinforced concrete structures based on crack image analysis. Sensors 2019, 19, 4304. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Burks, T.F.; Shearer, S.A.; Heath, J.R.; Donohue, K.D. Evaluation of neural-network classifiers for weed species discrimination. Biosyst. Eng. 2005, 91, 293–304. [Google Scholar] [CrossRef]
- Kozłowski, R.J.; Kozłowski, J.; Przybył, K.; Niedbała, G.; Mueller, W.; Okoń, P.; Wojcieszak, D.; Koszela, K.; Kujawa, S. Image analysis techniques in the study of slug behavior. In Proceedings of the Eighth International Conference on Digital Image Processing (ICDIP 2016), Chengdu, China, 20–22 May 2016. [Google Scholar] [CrossRef]
- Ludwiczak, A.; Ślósarz, P.; Lisiak, D.; Przybylak, A.; Boniecki, P.; Stanisz, M.; Koszela, K.; Zaborowicz, M.; Przybył, K.; Wojcieszak, D.; et al. Different Methods of Image Segmentation in the Process of Meat Marbling Evaluation. In Proceedings of the Seventh International Conference on Digital Image Processing (ICDIP 2015), Los Angeles, CA, USA, 9–10 April 2015. [Google Scholar] [CrossRef]
- Siebring, J.; Valente, J.; Domingues Franceschini, M.H.; Kamp, J.; Kooistra, L. Object-Based Image Analysis Applied to Low Altitude Aerial Imagery for Potato Plant Trait Retrieval and Pathogen Detection. Sensors 2019, 19, 5477. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Al-Mallahia, A.; Kataoka, T.; Okamoto, H.; Shibata, Y. An image processing algorithm for detecting in-line potato tubers without singulation. Comput. Electron. Agric. 2010, 70, 239–244. [Google Scholar] [CrossRef] [Green Version]
- Tian, H.; Zhao, J. The Summary of Researches on Detections of Potato Surface Defects by Machine Vision. In Proceedings of the 2nd Workshop on Advanced Research and Technology in Industry Applications, Dalian, China, 14–15 May 2016; pp. 1468–1472. [Google Scholar]
- Razmjooy, N.; Somayeh, M.B.; Soleymani, F. A real-time mathematical computer method for potato inspection using machine vision. Comput. Math. Appl. 2012, 63, 268–279. [Google Scholar] [CrossRef] [Green Version]
- Przybył, K.; Górna, K.; Wojcieszak, D.; Czekała, W.; Ludwiczak, A.; Przybylak, A.; Boniecki, P.; Koszela, K.; Zaborowicz, M.; Janczak, D.; et al. The Recognition of Potato Varieties using Neural Image Analysis Method. In Proceedings of the Seventh International Conference on Digital Image Processing (ICDIP 2015), Los Angeles, CA, USA, 9–10 April 2015. [Google Scholar] [CrossRef]
- Boniecki, P.; Koszela, K.; Świerczyński, K.; Skwarcz, J.; Zaborowicz, M.; Przybył, J. Neural Visual Detection of Grain Weevil (Sitophilus granarius L.). Agriculture 2020, 10, 25. [Google Scholar] [CrossRef] [Green Version]
- Lopez-Maestresalas, A.; Keresztes, J.C.; Goodarzi, M.; Arazuri, S.; Jaren, C.; Saeys, W. Non-destructive detection of blackspot in potatoes by Vis-NIR and SWIR hyperspectral imaging. Food Control 2016, 70, 229–241. [Google Scholar] [CrossRef] [Green Version]
- Rutolo, M.; Covington, J.A.; Clarkson, J.; Iliescu, D. Detection of potato storage disease via gas analysis: A pilot study using field asymmetric ion mobility spectrometry. Sensors 2014, 14, 15939–15952. [Google Scholar] [CrossRef] [Green Version]
- Rutolo, M.; Iliescu, D.; Clarkson, J.; Covington, J.A. Early identification of potato storage disease using an array of metal-oxide based gas sensors. Postharvest Biol. Technol. 2016, 116, 50–58. [Google Scholar] [CrossRef]
- Ślósarz, P.; Stanisz, M.; Boniecki, P.; Przybylak, A.; Lisiak, D.; Ludwiczak, A. Artificial neural network analysis of ultrasound image for the estimation of intramuscular fat content in lamb muscle. Afr. J. Biotechnol. 2011, 10, 11792–11796. [Google Scholar] [CrossRef]
- Manickavasagan, A.; Al-Mezeini, N.K.; Al-Shekaili, H.N. RGB color imaging technique for grading of dates. Sci. Hortic. 2014, 175, 87–94. [Google Scholar] [CrossRef]
- Kujawa, S.; Nowakowski, K.; Tomczak, R.J.; Dach, J.; Boniecki, P.; Weres, J.; Mueller, W.; Raba, B.; Piechota, T.; Rodríguez Carmona, P.C. Neural image analysis for maturity classification of sewage sludge composted with maize straw. Comput. Electron. Agric. 2014, 109, 302–310. [Google Scholar] [CrossRef]
- Przybył, K.; Boniecki, P.; Koszela, K.; Gierz, Ł.; Łukomski, M. Computer vision and artificial neural network techniques for classification of damage in potatoes during the storage process. Czech J. Food Sci. 2019, 37, 135–140. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| rivs1 | rivs2 | rivs3 | rivs4 | rivs5 | rivs6 | rivs7 | rivs8 | |
|---|---|---|---|---|---|---|---|---|
| rank | 2 | 4 | 7 | 1 | 8 | 3 | 5 | 6 |
| quotient | 1771 | 1687 | 10175 | 1771 | 1008 | 1759 | 1615 | 1532 |
| Tuber Without Visible Damage | Tuber With Visible Mechanical Damage | Green Tuber | Rotten Tuber | |
|---|---|---|---|---|
| Total | 60 | 60 | 60 | 60 |
| Correct | 54 | 51 | 58 | 57 |
| Wrong | 6 | 9 | 2 | 3 |
| Unknown | 0 | 0 | 0 | 0 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Przybylak, A.; Kozłowski, R.; Osuch, E.; Osuch, A.; Rybacki, P.; Przygodziński, P. Quality Evaluation of Potato Tubers Using Neural Image Analysis Method. Agriculture 2020, 10, 112. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture10040112
Przybylak A, Kozłowski R, Osuch E, Osuch A, Rybacki P, Przygodziński P. Quality Evaluation of Potato Tubers Using Neural Image Analysis Method. Agriculture. 2020; 10(4):112. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture10040112
Chicago/Turabian StylePrzybylak, Andrzej, Radosław Kozłowski, Ewa Osuch, Andrzej Osuch, Piotr Rybacki, and Przemysław Przygodziński. 2020. "Quality Evaluation of Potato Tubers Using Neural Image Analysis Method" Agriculture 10, no. 4: 112. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture10040112