A Comparative Study on Application of Unmanned Aerial Vehicle Systems in Agriculture



School of Electronics and Information Engineering, Hebei University of Technology, Tianjin 300401, China
*
Author to whom correspondence should be addressed.
Agriculture 2021, 11(1), 22; https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11010022
Submission received: 9 November 2020
/
Revised: 8 December 2020
/
Accepted: 8 December 2020
/
Published: 1 January 2021
(This article belongs to the Special Issue New Technologies and Spatiotemporal Approaches in Precision Agriculture)
Abstract
:Presently in agriculture, there is much ample scope for drone and UAS (Unmanned Aircraft System) development. Because of their low cost and small size, these devices have the ability to help many developing countries with economic prosperity. The entire aggregation of financial investments in the agricultural area has increased appreciably in recent years. Sooth to say, agriculture remains a massive part of the world’s commercial growth, and due to some complications, the agriculture fields withstand massive losses. Pets and destructive insects seem to be the primary reasons for certain degenerative diseases. It minimizes the potential productivity of the crops. For increasing the quality of the plants, fertilizers and pesticides are appropriately applied. Using UAVs (Unmanned Aerial Vehicles) for spraying pesticides and fertilizing materials is an exuberant contraption. It adequately reduces the rate of health dilemma and the number of workers, which is quite an impressive landmark. Willing producers are also adopting UAVs in agriculture to soil and field analysis, seed sowing, lessen the time and costs correlated with crop scouting, and field mapping. It is rapid, and it can sensibly diminish a farmer’s workload, which is significantly a part of the agricultural revolution. This article aims to proportionally represent the concept of agricultural purposed UAV clear to the neophytes. First, this paper outlines the harmonic framework of the agricultural UAV, and then it abundantly illustrates the methods and materials. Finally, the article portrays the outcome.
1. Introduction and Overview
The UAV is commonly known as UAS or, more precisely, as a drone, which can fly autonomously. UAV traditionally has a steadfast backdrop in aerodynamics, momentum arrangements, and theoretical physics’ practical rules. In the recent few years, it has also been a band of smart agriculture [1]. Smart agriculture is data-driven; UAVs can correctly receive and equitably distribute this information, allowing producers to take steps based on individual soil circumstances. Precision farming, crop monitoring, geographical tracking, and field mapping are a few sectors where UAVs play a massive role [2,3]. Image analysis is the essence of a UAV. In image analysis, the photos are promptly captured by UAV camera, and it is then adjusted to enhance the quality using various software to explore typically and precisely the target area and correctly recognize the unconventional objects. Agricultural UAV properly utilizes image processing to save an accurate record of plants’ growth, quality of the active area, pest control, etc. The dynamic UAV marketplace is presently strongly patchy, with diverse software providers and professionals competing fiercely in addition to leading manufacturers, and the predicted value of UAV Solutions in the agricultural industry is more than $32 billion [4].
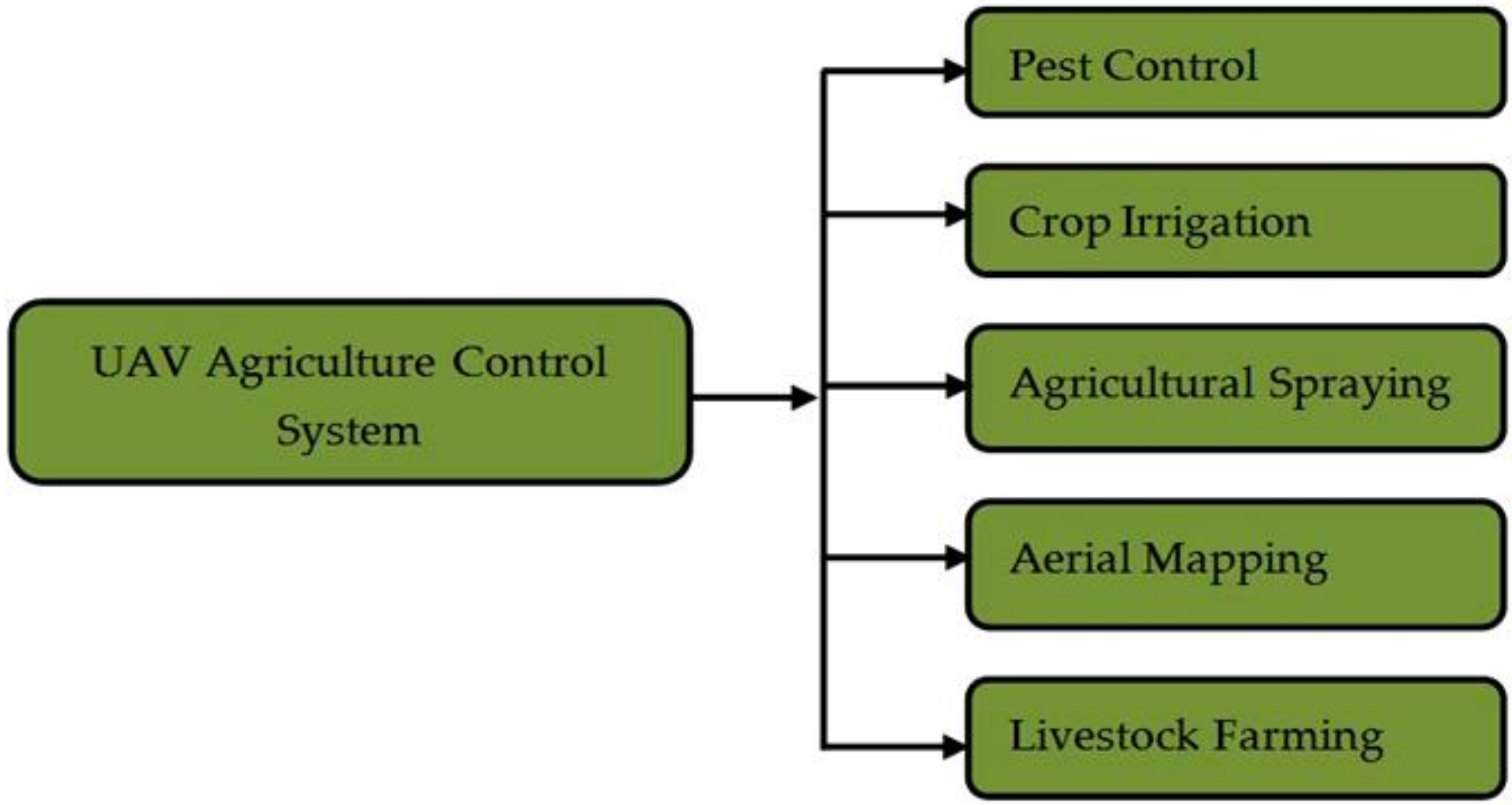
The human population’s brisk extension increases the fundamental need for high productivity, high performance, and sustainable farming [2]. More than 60 percent of the planet’s population naturally depends on agriculture for survival in the current world [5]. It is a crucial factor for ecological conservation in the developing world. The modernization of agriculture is mandatory because it increases production and food supply. UAVs are one of the most beneficial machines for modern agriculture. Spraying pesticides and fertilizer remains quite an uncomplicated task for UAVs [6]. UAVs for spraying help restrict human touch with fertilizers, pesticides, and other dangerous substances [7]. Some developing countries like India, China, South Korea, Brazil, Sri Lanka, and Japan have already commenced agricultural monitoring by UAVs substantially. Moreover, developed countries like the USA are definitely in the driving seat in this profitable business. A diagram of the agricultural control system is shown precisely in Figure 1.
A UAV can quickly survey an area of several kilometers and adequately provide long-range connections with or without payloads. UAVs come in various forms and exceptional abilities, and the aerodynamic designs differ remarkably from UAV’s varieties. Different UAVs have a different speed and weight carrying capacitance. As a result, it is vital to understand which UAV is most suitable for agricultural monitoring and complex operation. Reliably using a UAV is a simple, speedy, and cost-effective alternative for agricultural activity [8]. It can also be serviceable in adverse weather conditions. UAVs can monitor crops more correctly, regularly, and affordably, accouching more eminent quality information that is modernized frequently to grant insight into crop improvement and highlight wasteful or unproductive practices. UAVs can also be utilized to produce multi-spectral pictures of crops, which are then examined to trace changes in form and maturity [9]. UAVs can contribute constructively valuable assistance to both producers and agronomists. It is reasonable to equip UAVs with infrared cameras to extract more information from the imagery [10]. Such as, it will undoubtedly help define the amount of chlorophyll in the specific crops properly. By universally adopting UAVs for agricultural mapping, producers can stay instantly updated on crops’ health in a definite boundary and properly designate which area needs attention, plus having an assorted amount of actionable data available can prefer well-read choices scientifically based on factual data. Besides, in [11], a mobile software was divinely revealed for controlling the tracking data and storing conditions of the agricultural goods. This sort of modern system can be efficiently utilized in the monitoring field. Actually, positive cooperation is needed among the researchers, specialized companies, and producers to incorporate modern technological additions into efficient agricultural and forestry sectors’ profitable solutions [12].
Moreover, UAVs for agriculture demonstrates a few limitations. Privacy risk, complex spraying environment, long-distanced positioning, and accurate data interpretation are some prime examples of its disadvantages [13]. As UAVs are remotely guided, they genuinely need a datalink with the ground control system, and the direct connection can be compromised by unwanted users. The essence of data is vital and must be the focus of UAV use judgments. However, the cons will not be the prime focus of this paper. If UAV technology continues to grow, the expenses and limitations of agriculture will definitely decrease [14].
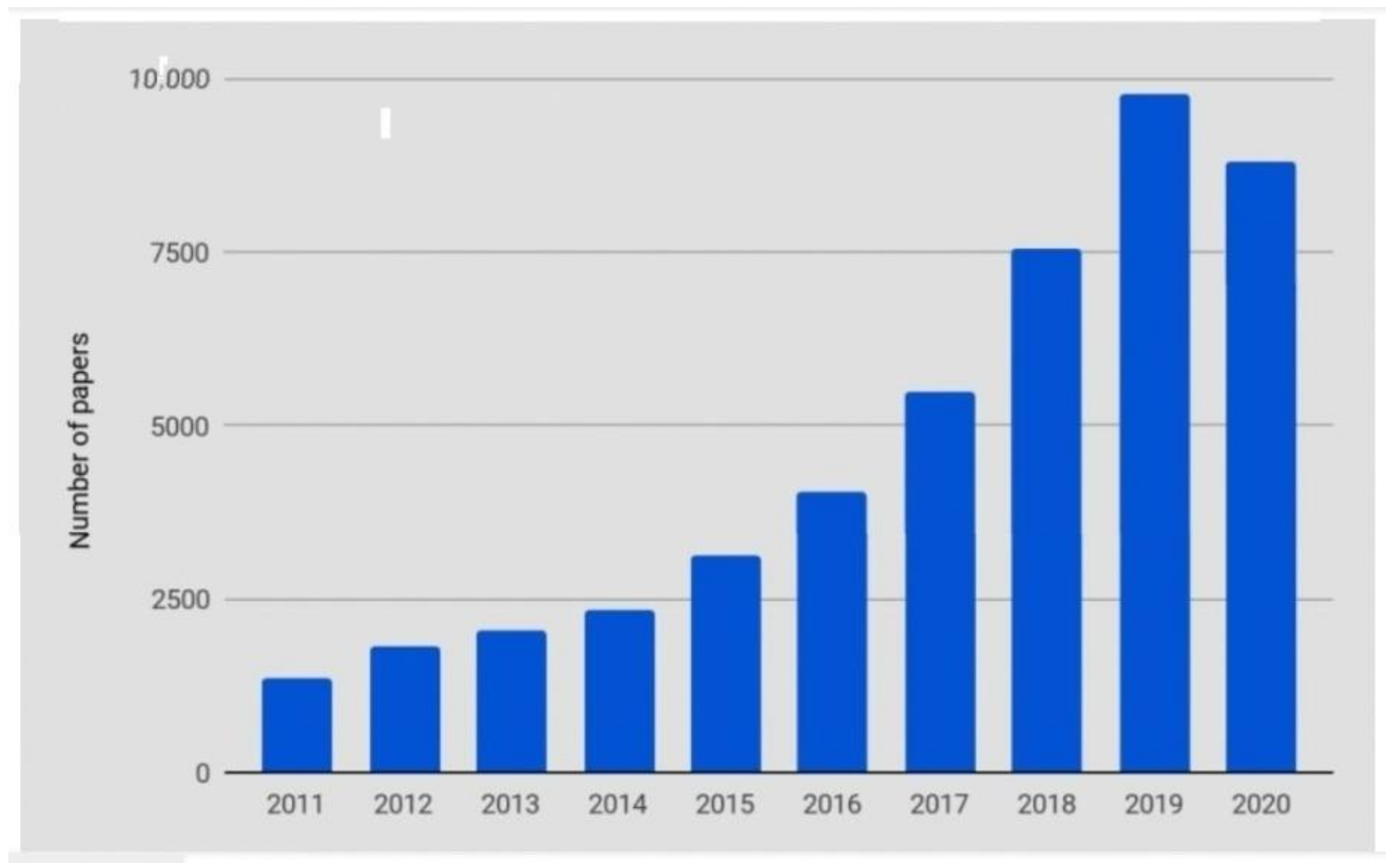
This paper typically portrays the character of suitable UAVs for a specific agricultural purpose. Furthermore, it will be explicit about assuming which archetype of a UAV is imperative for particular farming works. This article’s structured analysis is based precisely on the specific keyword and abstract searches in the Scopus, WOS (Web of Science), and Google Scholar databases. Plus, several reliable websites were also polled for subject-related information. Figure 2 shows the approximate number of articles published on Agricultural UAV from 2011–2020. Additionally, Table 1 profusely illustrates some of the published articles about UAVs’ applications in recent years. This paper’s remainder contains five key segments. Sections two, three, four, and five respectively picture the mythology and materials, crop monitoring, spraying system, and livestock farming. Moreover, the final part positively asserts the conclusion and future scope.
2. Methods and Materials
2.1. Classifications of Unmanned Aerial Vehicle
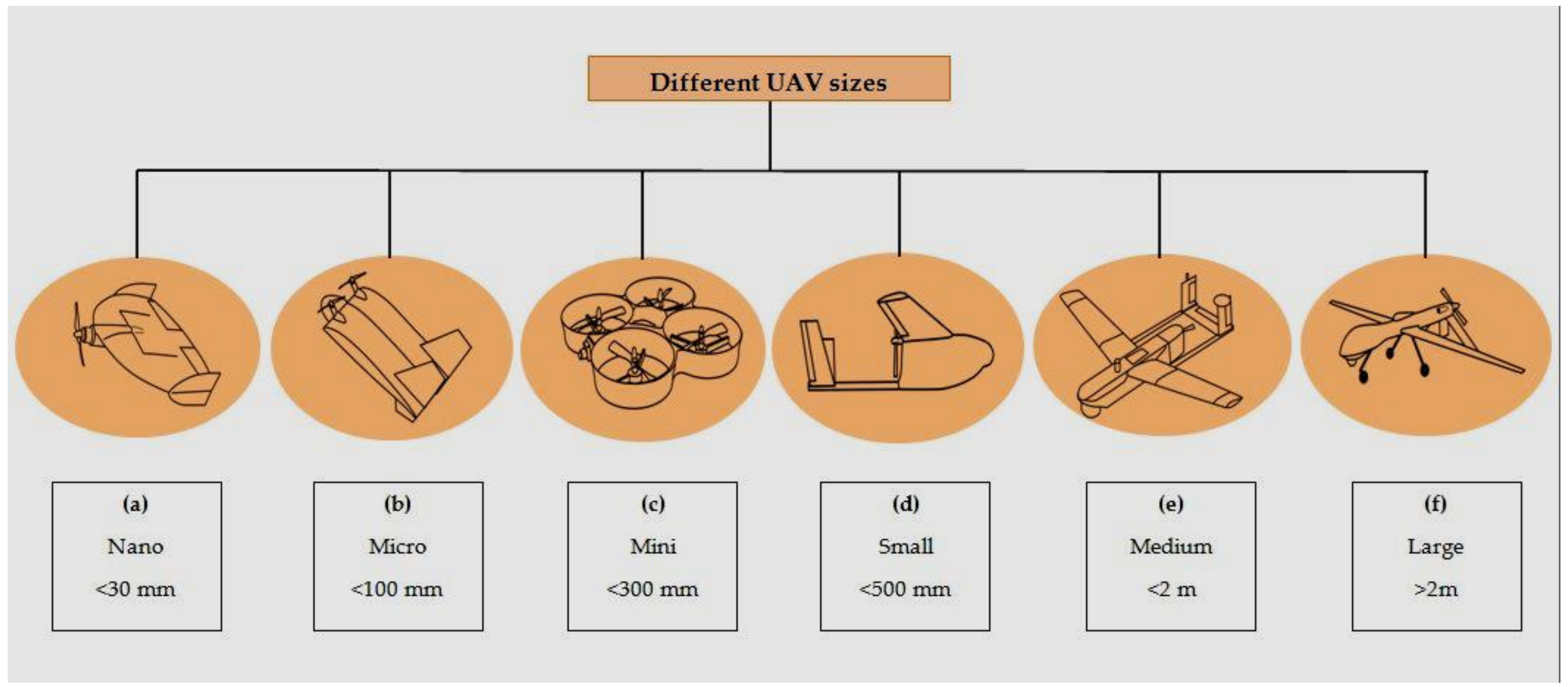
The UAV itself is valuable as a recognized principle for transferring a decent amount of payload, which operates efficiently in particular agriculture functions. UAVs currently represent a suitable alternative to observe vast, remote, and challenging access areas accurately. Several modern kinds of UAVs exist scientifically based on the accompanying features. Naturally, depending on the ultimate purpose and intentions, one must adopt an appropriate UAV [22]. Comparably by size, there are nano [16] (Figure 3a), micro [17] (Figure 3b), mini [18] (Figure 3c), small [19] (Figure 3d), medium [20] (Figure 3e), and large [21] (Figure 3f) UAVs.
Commonly, due to the miniature size, less battery capacitance, and limited weight-load capacity, the nano and micro UAVs cannot monitor a vast area. As a result, it is until now not the worthiest choice for precision agriculture, but it can be typically implemented for Indore farming operations. Besides, from [19,20], it can be stated that the mini and small UAVs are playing quite an impressive role in crop monitoring purposes. Nevertheless, compared to the mini and small UAVs, the medium and the large UAVs are hard to maintain, control, and pretty high-priced. However, it is possible to sufficiently occupy the medium and large UAVs in the agrarian sector by utilizing them properly. It is also conceivable to typically classify the UAVs based on their specific type of wings. Fixed-wing (Figure 4a) represents a standard type of UAV where its arms are unmovable and controlled either remotely or autonomously. Another classic type of wing-based UAV is Hybrid (VTOL) (Figure 4b). Besides, it is also known as a fixed-wing jet or alleged as a hybrid UAV or VTOL aircraft [22]. A hybrid UAV or VTOL can be operated within almost any possible situation, and it ideally has a multi-rotor design that inseparably unites four or more propellers.
Fixed-wing UAVs are already implemented tremendously for field mapping and livestock motive [18,23,25]. The uncomplicated design and control basis of the Fixed-wing UAV makes it more reliable, and it is not pricey compared to the other UAV models. On the other hand, the hybrid VTOL UAVs are enormously influential for its appropriate fight techniques, which can be handy for agricultural contemplation.
Rotary-wing UAVs are organized structures of two or three rotating mechanism blades that spin around a fixed pole, likewise, recognized as a rotor. The blades of the rotor operate a similar method as a fixed wing. Nevertheless, the settings of the rotor have specific benefits and limitations. Rotary-wing UAV is also divided into two other sections. One is single-dual rotors (Figure 5a), and the other is multi-rotor. The most reliable wing-based UAV is the multi-rotor UAV. Multi-rotors are quick and agile platforms and can satisfactorily perform demanding maneuvers. It is the most significant technological rise in the last decade. There are equally numerous models of Multi-rotor UAVs i.e., Tricopter (Figure 5b), Quadcopter (Figure 5c), Hexacopter (Figure 5d) and Octocopter (Figure 5e).
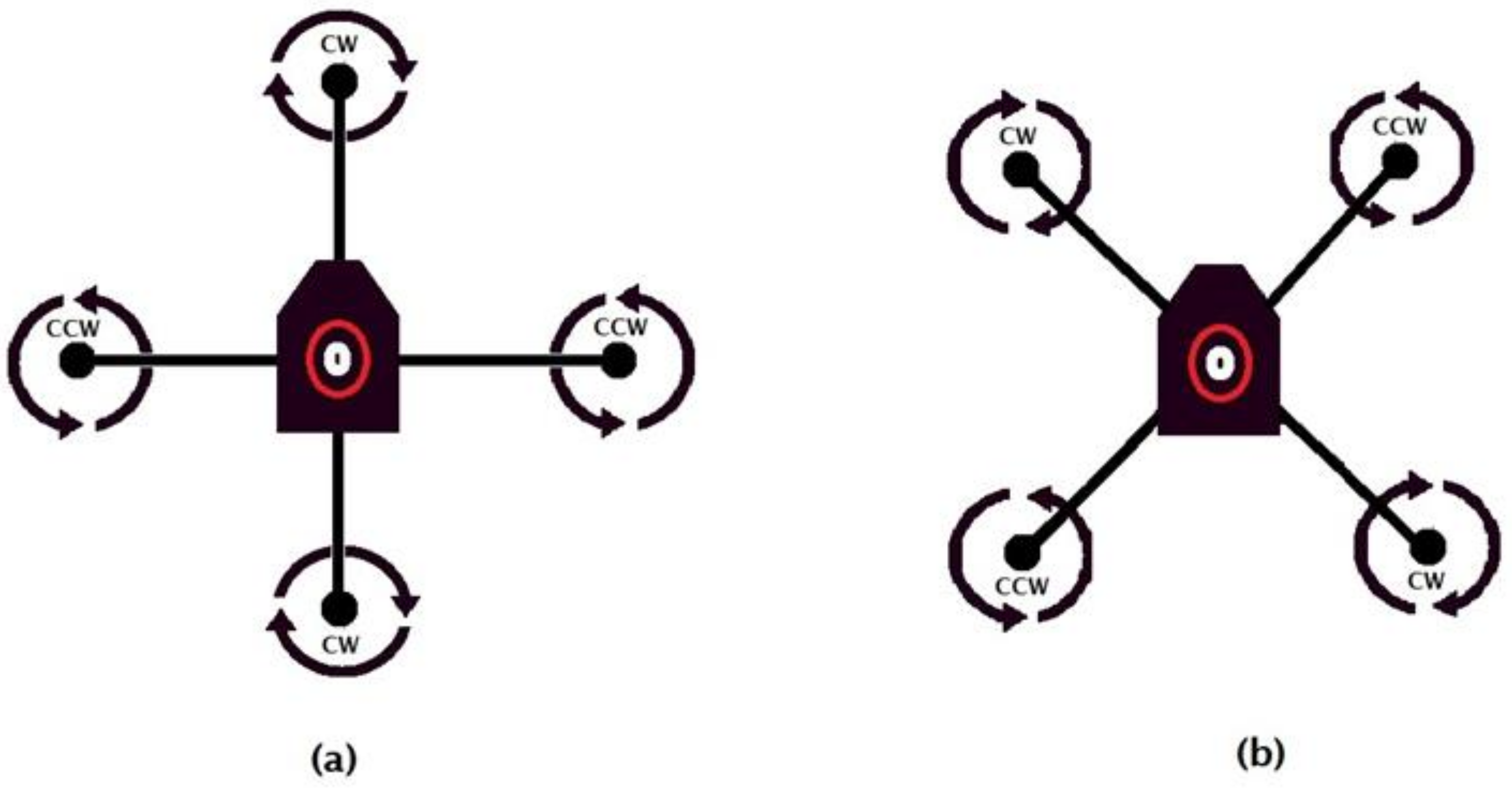
Single-dual rotors and Tricopter UAVs are not involved in modern agriculture extensively due to its trite aerodynamics and controlling perspective. Whereas the Quadcopters are popularly employed for agricultural persistence because of their excellence in aeronautics. Plus, this is the most fitting prototype for the agricultural enclosure according to the number of researches that appeared regarding it. Consequently, it is noteworthy to discern briefly regarding the Quadcopters. A Quadcopter, also recognized as a quad-rotor, correctly is a UAV with four rotors and can fly without a pilot [31]. It is permissible to construct a Quadcopter using a wireless communication system meticulously. It is the most suitable designed UAV for an agricultural perspective. In a Quadcopter, every rotor plays a vital role in the desired direction and proper balance of vehicles and lifting payloads. A Quadcopter genuinely has two unique designs; (i) plus model (Figure 6a), and (ii) cross model (Figure 6b). The Quadcopter with cross configuration is more stable than the plus configuration Quadcopter, for the equitable distribution of rotor force during hover. Two counter-rotating propellers are there for each particular side’s pitch and roll axis for the cross configuration. However, plus configuration has only one on each side. Pitching ahead in this practical form establishes minor stability in the roll axis [32]. In short, the four rotors sufficiently advance a Quadcopter to a very well-built flying machine. A pair of the rotors turns clockwise (CW), and the other pair rotates counterclockwise (CCW). Furthermore, that progressively eliminates the proportional torque naturally generated by the rotating-rotors. It also assists in excluding the boom requirement, which properly accommodates the Quadcopter, enhancing stability.
Hexacopter and Octocopter UAVs are also exploited in various agricultural and monitoring operations [7,9,29,42,55]. Because of traditionally having a greater number of rotors, these UAVs acquire the potential advantage to convey a desirable amount of payload. Hence, producers can efficiently utilize these specific kinds of UAVs for spraying perspective because these UAVs can transport considerably more amount of fluid or sprinkling substances. But the aerodynamics and flight control of the Hexacopter and Octocopter UAVs are immensely complicated compared to the Quadcopters.
2.2. Unmanned Aerial Vehicle charging
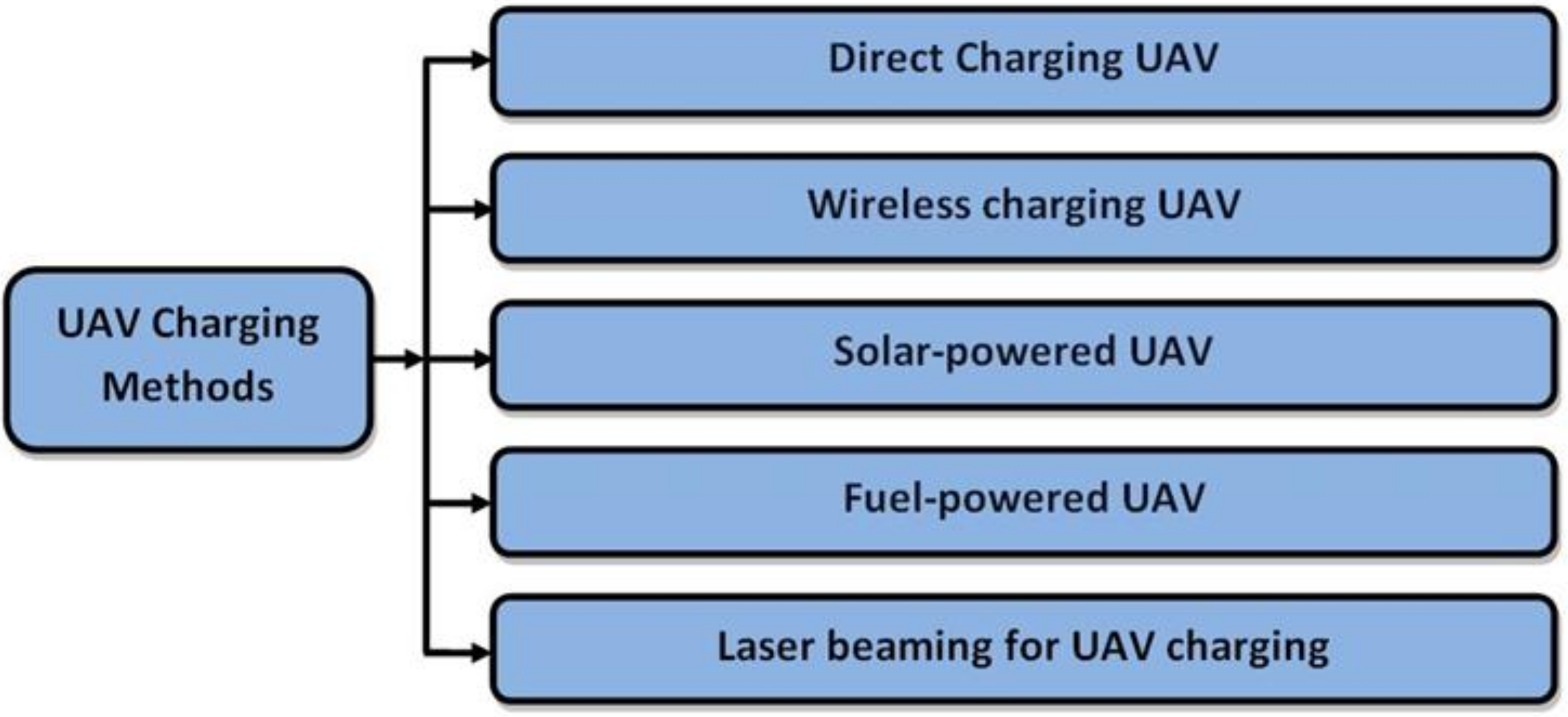
The most significant inconvenience of a UAV is the weight of its systems, and it allows a small amount of weight capacity for the camera, sensors, and other essential stuff [67]. All the standard UAV models assuredly have a limited flight time and endurance. An ordinary UAV can typically operate with impunity for around 10–20min [68], and it is necessary to recharge a UAV if the battery has drained beyond 10 percent of its capacity [69]. Charging indeed indicates a capacitor attached to a circuit with a DC source and these two functions. The more substantial the mAhs, the better long-drawn the UAV may rest and recharge. There, in general, are many alternative ways to power up a UAV based on the charging type shown in Figure 7.
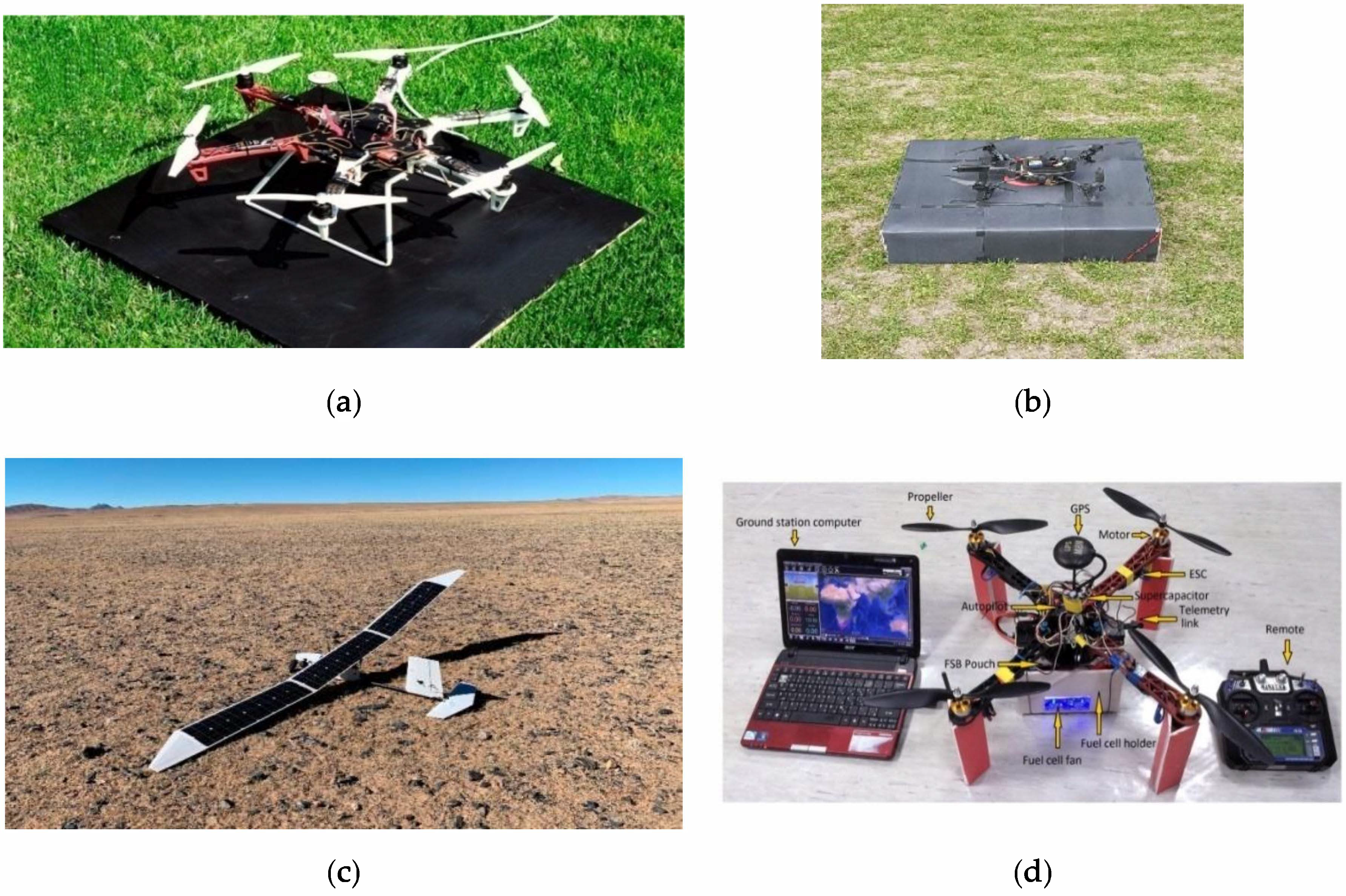
Battery charging UAVs are far more substantial than fuel-cell based UAV at lessening carbon emissions. Additionally, fuel-cell based UAVs are extremely expensive to install correctly than battery charging UAVs. Battery charging UAVs are also more convenient to recharge or refill. Presently, most UAVs are battery-powered (89%), and significantly fewer developed UAV models are Fuel-powered (11%) [46]. USB-charging realistically is the more expeditious way of charging batteries and convenient ways of direct charging. It is withal the most frequently used method to properly charge a UAV, where the UAV takes the charges directly from the power source through a flexible wire, and the UAV contains a charging port like other daily used devices. Recently, the wireless charging system is getting exoteric, and researchers are working strenuously on this theme. In [70], an effective UAV wireless charging process has been proposed, where a charging station, including some transmission coils, was utilized to convey power to charge the UAV cell. Similarly, the researchers developed two wireless charging methods (stationary and dynamic) in [71]. A wireless power transmission system is used for a VTOL UAV based on magnetic resonant coupling in [72]. And a wireless power transmission system is used for a small-sized UAV based on the effectiveness of a mechanical part of the UAV in [73], portrayed in (Figure 8a). Whereas, in [74], by using target detection and tracking algorithm, the researchers have strongly developed an autonomous wireless charging system. In this technology, the UAV detects, tracks, and lands correctly on the charging station, shown in (Figure 8b). A solar-powered UAV was sufficiently developed using PPMS in [75] to realistically achieve UAV’s continuous surveillance. Comparably, a low-cost solar-powered UAV with enhanced control efficiency is highlighted in [76], exactly shown in (Figure 8c). Actually, the sun’s power is inexhaustible, clean, and free, which produces green and low-cost electricity from direct sunlight by efficiently utilizing the photovoltaic component [77]. Therefore, it’s evident to have electricity from sunlight, and the high-tech is becoming pre-eminent day by day. Other charging methods are still in the experimentation process and not vividly used. In [78], the researchers properly examined and conferred an unprecedented process intimately associated with operating a small capacity and less expensive fuel-cell on a UAV portrayed in (Figure 8d). Likewise, a study about the laser beam UAV charging is presented in [79], where the laser photovoltaic element was assembled to produce the utmost energy from a particular wavelength laser light origin.
The effective implementation of the UAV and choosing the proper UAV definitely depends on the producer’s point of view. Long-lasting or fuel-powered UAVs are costly and comparably hard to maintain. The producers need to wisely decide which version or which type of UAV and UAV charging method is suitable for them and employ it positively for the benefit of their own. Every specific type of UAV has its own restrictions and functional limitations but overcoming them is equally possible. Researchers are still working hard on this key issue and the improvement is continuing.
2.3. Methodology
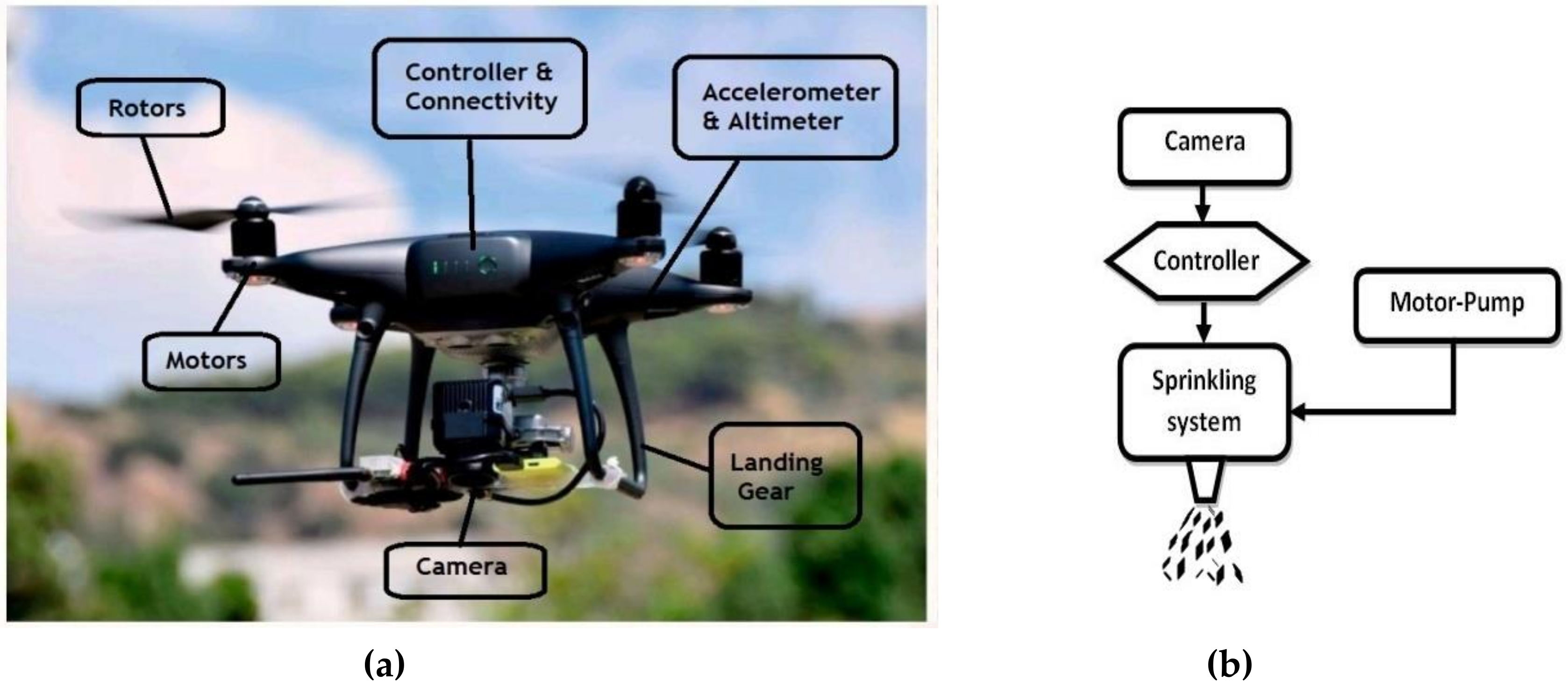
UAVs are ostensibly a heterogeneous kneading of mechanics, hardware, and software. In brief, it is a unique combination of some intricate parts, where all the separate parts work together to make the UAV susceptible, and the components can be huge and sophisticated. Several essential features of the UAV are chosen precisely based on the configuration parameters and constructed as per the possible necessities. A Model UAV is purportedly shown in (Figure 9a). Some fundamental ingredients of a UAV are:
- Camera: UAV camera or imaging system is applied precisely in UAV applications to collect visual images, where certain elements may also be in motion [36]. It may consolidate modern RGB cameras, thermal cameras, IR cameras, etc. The coherence of the camera is to search and rescue methodically or to monitor. Furthermore, the camera is a fundamental tool for crop monitoring. For various operations, different kinds of cameras are required. Basically, the application of images captured with a UAV in agriculture requires a differentiated workflow, such as Photogrammetric aspects and the Estimation of variables related to agronomic aspects, for which more complex analysis is required.
- Landing Gears: Landing gears are indispensable parts of the safer landing. A UAV landing gear works in tacitly supporting the ideal weight of the whole aircraft. It also assists in rolling chassis and shock consumption throughout landing or takeoff, and appreciably reduces the impact pressures conveyed to the airframe. Besides, it prevents the UAV from being thrown off the deck. It’s recently getting utilized for UAV wireless charging, and the method is to recharge a UAV battery by making electrical connections on the UAV landing gear and the landing place [80].
- Motors: An efficient motor’s primary responsibility is to typically rotate the propellers of multirotor UAVs to operate them to fly. UAV demands thrust to fly in the atmosphere and to make the UAV perform, robust, and small motors are required. Furthermore, the most reliable mechanism which can be applied universally is BLDC (Brushless Direct Current) motors. BLDC Motors are the potential source of flight power during the operation of UAVs [81]. The motors are accurately controlled by an ESC (Electronic Speed Controller), which is employed to drive the propellers [24]. Especially, ESC is a miniature device, and it can rightly interpret the pilot’s explicit instructions, which professionally manages the motors to regulate the movements properly.
- Rotors: Rotors are the principal key for sufficient momentum, thrust, and complete control of a UAV. Genuinely, Rotors enable possible modifications of its pitch angle, yaw rate and also make alterations in the motor accelerators to properly handle the roll and vertical velocity [33]. It efficiently converts motion into velocity and seamlessly allows the UAV to balance accurately. The extended surface region of the rotors naturally generates fiction and supports UAVs drifting sidewise also. Rotors have a various number of blades and twist angles for different operations.
- Accelerometer and Altimeter: Accelerometers are active devices combined with gyroscopes and magnetometers that measure acceleration and implement the expedition force, in which the UAV is subjected to all three axes [82]. It is additionally a necessary sensor for a UAV because it conveniently provides crucial inputs in a stationary point and accurately determines the UAV’s position and adjustment. Moreover, an altimeter is efficiently utilized for altitude measurement by calculating the specific location’s air pressure [83]. The exact altitude information is vital for the navigation parameter.
- Controller and Connectivity: According to the UAV’s smooth lead and control, the centralized UAV state must be accessible to the controller at a reasonable bandwidth. UAVs can be remotely controlled or flown autonomously, and it wholly relies on appropriate distance, data terminal, and complex topography. The controlling system on top adequately fulfills a requisite role in the UAV sprinkling system, prominently shown in (Figure 9b). GPS and battery are two crucial portions of the connectivity orderliness [2]. UAV navigation and air traffic management are two principal responsibilities for the UAV connectivity system.
Figure 9.
Model UAV (DJI Phantom 4 pro, Shenzhen, China) [48] (a). UAV sprinkling system (photo illustrated by the authors) (b).
Figure 9.
Model UAV (DJI Phantom 4 pro, Shenzhen, China) [48] (a). UAV sprinkling system (photo illustrated by the authors) (b).

Nowadays, the practical applications of UAVs are quite scattered. While choosing the right UAV model, it is invariably required to determine which responsibilities must be undertaken using the UAV and whatever is genuinely needed. Some UAVs are suitable for astonishing speed and excellent durability, and some are great for long-range flying and monitoring accuracy. In sum, every specific purpose entails a specific kind of cognitive process, which additionally includes various types of UAVs, and all perspectives should be painstakingly analyzed before flying a UAV. UAVs can be uniquely specified in three significant categories based on the agricultural surveilling purpose, and Table 2 generally highlights the different types, speeds, and loads of these kinds of UAVs [3,10,84,85].
2.4. Hardware and Software Elements
UAVs are a motley composite of specialized hardware, software, and modern techniques. Usually, depending on the startling varieties of UAVs, multiple software and hardware elements are employed to regulate the UAV appropriately. Hardware typically denotes the unified body or the structural elements. As enormously complicated technological devices, UAVs assuredly have some chief ingredients, and it can be comparatively large and sophisticated. Indeed, UAV hardware sufficiently indicates the mechanical parts of a UAV, and it takes instructions from software applications. Further, the software can be proclaimed as the brain of a UAV. Software is ostensibly designed to direct the UAVs on whether to go and whatever to do. As a possible way to conjecture and combine every essential data of the UAV, the software component positively enhances an intricate system. UAV software contains a comprehensive collection of specific programs, methods, and operations. Plus, it performs a particular responsibility, as objected to its hardware parts. The unique combination of hardware and software regulates the UAV properly. Some of the underlying hardware and software elements are respectively presented in Table 3 and Table 4.
3. Crop Monitoring
UAV based crop monitoring is a high-tech that expedites crop vegetation index through high-resolution photos for various crops and intimates the crop’s condition [37]. Monitoring crops’ production is essential to predict and plan for disruptions in food stocks and shifts in global crop market rates. UAV imagery is the medium for accurate crop monitoring, and Wireless communication is the system to gain data. MAVLink (Micro Air Vehicle Link) communication protocol is one of the primary mechanisms for UAV’s wireless communication [95]. Capturing the diverse range of wavelengths is the basis of the entire monitoring method. There are five principal wavelength bands, which the camera of the UAV professionally captures, i.e.,
- Blue (0.44–0.51 µm) wavelength (BLUE),
- Green (0.52–0.59 µm) wavelength (GREEN),
- Red (0.63–0.68 µm) wavelength (RED),
- Red-edge (0.69–0.73 µm) wavelength and
- Near-infrared (0.76–0.85 µm) wavelength (NIR).
After typically collecting the complete wavelength information, the accurate data is then analyzed by remote sensing software and converted into a vegetation index map. The identification of stressed areas in crops through multispectral indices requires a series of particular works with the consequent field validation, and NDVI (Normalized Difference Vegetation Index) is one of the vastly used vegetation indices [41]. By correctly applying the standard NDVI formula, it is exceptionally unproblematic to identify the green field’s possible location instantly. As a result, spraying in the designated area becomes unequivocal. Additionally, the UAVs are autonomous, and there is no need for controlling it manually. The NDVI equation is presented in Equation (1). And NDVI is also characteristically mentioned in [1,3,4,8,9,11,14,35,36,41,44,47,48,49,50,52,53,54,59,60,61,64,81,89,93,96,97,100,101].
Here RED is Reflectance of the Red-band or Red-light. The NDVI values are perpetually in the interlude of (−1; +1). If this equation’s result is near 0, it ostensibly means the area’s vegetation is low. Inadequate vegetation genuinely has average NDVI values of 0.2 to 0.5, and if the outcome is close to +1, it intimates the greenish density is high. Therefore, it is straightforward for a prominent farmer to perceive his field’s condition. In [53], some model vegetation indices map were manifested ideally.The article also highlighted another similar formula like NDVI, which also ranges between (−1; +1), but the desired result tends to be higher than the NDVI values. This particular formula is recognized as the GNDVI (Green NDVI) formula, shown in Equation (2). The GNDVI values are similar to the NDVI, although the procedure typically uses the reflectance of Green-light (GREEN) instead of the Red-light (RED). Plus, other wavelength ranges rather than the Red-light should be examined to strengthen the high-biomass crop aptness while the Red-light is saturated [101]. So, the GNDVI formula is an eminent option, which is also highlighted in [4,8,36,47,50,64,96]
GNDVI = (NIR − GREEN)/(NIR + GREEN)
It is imperative to vigilantly monitor a vast farming land in a comparatively short time, and the UAV-based report must be highly detailed, accurate, and swift. Therefore, to explicitly distinguish what kind of UAVs are more fitting for the desired field is vital. Furthermore, an ideal UAV based crop monitoring system is prominently displayed in Figure 10.
From [96], we can accurately perceive the Difference Vegetation Index (DVI), which is also calculated with the Red-light (RED) to decrease the direct impact of soil reflectance. Similarly, by applying the Green-light (GREEN), the GDVI (Green DVI) can be determined. The DVI and GDVI equations are respectively presented in Equations (3) and (4).
VARI (Visible Atmospherically Resistant Index) formula can also be employed based on the NDVI and Near-infrared camera to determine the crop’s health [97], shown in Equation (5). In this equation, the Blue-light (BLUE) is also quite essential.
4. Spraying System
The accelerated extension of this high-tech can be observed clearly, and the primary rationalization UAV has the unique features of full control accuracy and fast response speed to the sprinkling system. In [51], five vital parts of a spraying UAV are well highlighted, and the principal features are;
- Prescription-map interpretation system and sprinkling controller;
- Medicine case;
- Hall-flow sensor;
- Miniature diaphragm pump;
- Pressure nozzle.
The fluid inside the medicine box instantly conveys to the nozzles and splits into tiny droplets under pressure. The Hall-flow sensor can be efficiently utilized to estimate the fluid flow inside the system, and the flow rate data can be fed-back to the sprinkling controller.
In summary, for spraying pesticides or fertilizers, a sprayer is connected technically to that tank of the UAV. The specific substance comes out from the tank by a nozzle. The controller correctly handles the whole process. It initiates the nozzle of the sprayer. A spray motor with a pump is employed to reliably produce suitable pressure to spray the fluid [42]. In [89], a distinctive way of calculating the optimum position of spray points needed for a specific stressed area has been displayed. And in [62], the researchers proposed a way of identifying the classifiers of spraying and non-spraying fields to accomplish the autonomous UAV spraying method in real-time. A suitable method for proper and secure payload transfer in site-specific crop arrangement is precisely shown in [90]. Different sprayers UAVs have a varying number of nozzles, substances flow speed, and weight capacitance. However, the quantity of nozzles realistically is not the primary reason for a fast flow speed. The analysis of several spraying nozzles and speeds is purportedly illustrated in Table 6, highlighting the upgraded applications and the performance of different types of UAVs delicately [7,30,42,43,45,55,58,98,99].
But the catechism arises that why should local producers adopt UAV sprinkling system, and the statement is facile;
- UAV based fertilizer and pesticide sprinkling efficiency are advantageous.
- Sprayer UAV reduces the usage of fertilizer and pesticides on the farm by a considerable amount.
- The UAVs can be autonomous and spray more smoothly.
- Environmental pollution can be handled adequately.
- UAV typically limits human contact with hazardous chemicals or noxious gases.
- A more limited number of qualified workforce or labor is required.
- The UAV sprinkling system saves valuable time for the producers and improves safety tremendously.
- Subject to the field, the UAV based spraying system assists appreciably reduce expenses.
The UAV spraying system operates based on an ingenious algorithm (Algorithm 1) shown below;
| Algorithm 1. The UAV spraying system |
|
1. Start. 2. Input Commands. 3. If Lack of fluid, a. Sprinkle fluid. b. Input Controls. 4. Otherwise, a. Light the indicator. b. Input Controls. 5. Stop. |
5. Livestock Farming
Livestock farming organically is where somebody can progressively increase the livestock for preferred food and sell for profit. Livestock highlights animals grown remarkably in a rustic environment to contribute constructively to industry and productive assets such as meat, eggs, milk, leather, etc. Livestock farming primarily involves breeding, cultivating, and fattening. This innovative technology graciously helps industrious farmers vigilantly monitor and control their animals and the desired field. The technology can positively enhance animal health by passively allowing the producers to respond instantly before an enigma appears. Actually, the principal method of UAV based livestock farming is uncomplicated. Firstly, the field circs are efficiently captured by an appropriate UAV camera, and then the evident result gathers in the private server. Finally, the producers can vigilantly monitor everything from anywhere by reliably using his phone or computer.
Nonetheless, the technology can also be utilized to meaningfully improve the field’s production ability, which could be prioritized above the animals’ well-being. The livestock farming methods sufficiently demonstrate the potential to develop animal welfare by efficiently implementing a constant image of well-being situations in real-time and facilitating immediate intrusions that avail the active congregation [88]. A UAV can naturally play a massive role in the livestock farming system. As an example, [50] accurately describes that the COVID-19 pandemic has undoubtedly added intensity on food production, demand, and supply chain arrangements, primarily striking grain food producers and importer nations. A short food supply chain traditionally based on the economic output from regional farms is less receptive to move and export bans and trades as a stable way in these strains. Local UAV-based data clarifications can grant an opportunity to approach these difficulties. The assignments of the UAV are very manageable in this high tech. UAVs typically picture an aerial overview of the livestock area employing thermal imaging and high-definition cameras. In [86], the researchers exuberantly reviewed the UAV imaginary system for surveying wild animals, reflecting the vivid future of livestock farming. Thus, for this sort of monitoring purpose, the perfect UAV landing is vital, and in [65], an applicable UAV landing control technique was explained and examined for the agricultural purpose. This unique technology is still expanding in the research phase, and leading researchers are quaintly adding tons of modern features in this theme placidly. Various prolific setups based on the image processing and machine learning system for UAV livestock monitoring of the sheep is well presented in [102]. Similarly, a UAV based convolutional neural networks for recognizing and counting Sheep is resolutely demonstrated in [103], and likewise for calves in [92] (Figure 11a). Moreover in [104] (Figure 11b), a numeration network for real-time counting and localization of infrequent targets in high-resolution UAV imagery was proposed.
On the other hand, in [93], the extensive survey purportedly shows that UAV based wildlife conservation and management is progressing because of the versatility in generating real-time data toward convenient decision making. What’s more, there are still some limitations of UAV controlled livestock farming, such as:
- -
- Merely employing this technology is relatively costly.
- -
- Producers frantically need extensive Hardware and Software knowledge, experience, and skills.
- -
- The logistics are incredibly complicated, and time commitment is virtually required.
- -
- Severe weather conditions are capable of advent data eruption.
- -
- UAV components’ Repairs and replacements are needed frequently.
- -
- Personal privacy attack remains a substantial concern for the producers.
6. Conclusions and Future Scope
There is a tremendous potential for a gradual increase in the field of agricultural UAVs. Firstly, this paper systematically highlights the UAVs’ primary classifications based on their comparable size, rotors, and wings. Then it typically represents the Quadcopter’s flying configuration, which is more fitting for agricultural purposes. After that, the paper sufficiently demonstrates the UAV charging methods and the possible consequence of it. Moreover, the exposition also reflects the conventional methodology of a UAV, and the essential parts. Next, the study underlines the necessary hardware and software elements of a UAV. The substantive crop monitoring system, UAV sprinkling method, and livestock farming techniques are also manifested in the latter part. Finally, the paper draws the conclusion and future scopes of the high-tech.
UAVs are lessening the incredible amount of wastage of fertilizer and pesticides. It is resolutely keeping the laborers aside from chemical side-effects and making their job comfortable and fast. The gist is, by properly utilizing the GPS and NDVI formula, an agricultural area that can be easily monitored and can detect the prime spots to sprinkle the effective pesticides or fertilizer. The NDVI rule adequately provides reliable information on a reasonable scale. As a result, Producers will be able to accurately determine the shortage of exact volumes of water, pesticide, and fertilizer. The eternity of the UAV market for agricultural purposes is exceptional. The requirement to sustain the stability between expense and quality has undoubtedly made UAVs mainly engaging among the agricultural technology developers, and the prominent roles of the agrarian UAVs are constantly expanding without imperiling the characteristic. These UAVs are proficient in accumulating information, and nimble production as advancing the standard. However, environmental changes occur pretty swiftly and make it troublesome for the producers to monitor vast fields or livestock. Hence, a few local producers utilize UAVs with 3-D mapping ability for field analysis information and thoroughly monitor the crops and livestock, and this technology is also applying remote sensing equipment for spraying pesticides and crops. The operational costs of the agricultural UAVs are yet considerably high, and there is much room for advancement. Notably, the battery capacitance, Nozzle types, image capturing, and processing system are some points that can be progressively improved. It can also help to conserve some of the world’s most severely threatened wildlife. Environmental change, territory destruction, and ruthless exploitation have led to the extinction of half of the earth’s wild creatures. Researchers are currently applying the UAV thermal image acquisition system to gather accurate species location and population data required for conservation strategies. Furthermore, innovative approaches will undoubtedly benefit wild animals. Some animals outlive in the colossal game reserves, and with a UAV, it is possible to instantly reach a considerably vaster range than one can by foot. A thermal camera can appropriately carry out an extensive role because it makes it more manageable to hint out the animals. Plus, the animals are less disturbed by this modern system. It is imperative to carefully preserve these animals and make sure they do not experience any poaching effects [105].
Sooth to say, Using UAVs for precision agriculture is not only delivering agricultural benefits but also shaping the UAVs’ revolution. This review will provide a brief knowledge to the new researchers about the agricultural UAVs, and it can play a positive role for future agrarian purposes. That pleasant day is not far-off when the farmers will likely sit on their UAV and roam across the farming land.
Author Contributions
Funding acquisition, S.F.; resources, Y.Z.; project administration, Y.Z.; methodology, M.F.F.R.; writing—original draft preparation, M.F.F.R.; visualization L.C.; validation L.C. All authors have read and agreed to the published version of the manuscript.
Funding
This work was funded by (Key Research and Development Plan Project of Hebei province, China) grant number (19210404D); (Key research and development project from Hebei Province, China) grant number(20351802D); (National Natural Science Foundation of China) grant number (42075129); (Graduate Innovation Funding Project of Hebei Province) grant number (CXZZSS2020031).
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
| Acronym/Symbol | Description |
| GDP | Gross Domestic Product |
| UAV | Unmanned Aerial Vehicles |
| UAS | Unmanned Aircraft System |
| UWB | Ultra-wideband |
| VTOL | Vertical Take-off Landing |
| MPC | Model Predictive Controller |
| DF | Detection of Failures |
| RGB | Red, Green and Blue |
| DC | Direct Current |
| mAhs | Milliampere Hours |
| USB | Universal Serial Bus |
| PPMS | Photovoltaic Power Management System |
| HD | High-definition |
| IR | Infrared |
| BLDC | Brushless Direct Current |
| ESC | Electronic Speed Controller |
| GPS | Global Positioning System |
| UAV-CR | Unmanned Aerial Vehicles—Close Range |
| UAV-SR | Unmanned Aerial Vehicles—Short Range |
| UAV-E | Unmanned Aerial Vehicles—Endurance |
| QGIS | Quantum Geographic Information System |
| GIS | Geographic Information System |
| WSN | Wireless Sensor Network |
| MAVLink | Micro Air Vehicle Link |
| NDVI | Normalized Difference Vegetation index |
| GNDVI | Green Normalized Difference Vegetation Index |
| 3-D | Three-dimensional |
| COVID-19 | Coronavirus disease outbreak 2019 |
References
- Kim, J.; Kim, S.; Ju, C.; Son, H.I. Unmanned Aerial Vehicles in Agriculture: A Review of Perspective of Platform, Control, and Applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Popescu, D.; Stoican, F.; Stamatescu, G.; Ichim, L.; Dragana, C. Advanced UAV–WSN System for Intelligent Monitoring in Precision Agriculture. Sensors 2020, 20, 817. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Giordan, D.; Adams, M.S.; Aicardi, I.; Alicandro, M.; Allasia, P.; Baldo, M.; De Berardinis, P.; Dominici, D.; Godone, D.; Hobbs, P.; et al. The use of unmanned aerial vehicles (UAVs) for engineering geology applications. Bull. Int. Assoc. Eng. Geol. 2020, 79, 3437–3481. [Google Scholar] [CrossRef] [Green Version]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Zavatta, G.; Perrone, T.; Figus, C. Agriculture Remains Central to The World Economy. 60% of the Population Depends on Agriculture for Survival. 2020. Available online: http://www.expo2015.org/magazine/en/economy/agriculture-remains-central-to-the-world-economy.html (accessed on 8 August 2020).
- Spoorthi, S.B.; Shadaksharappa, S.S.; Manasa, V.K. Freyr drone: Pesticide/fertilizers spraying drone—An agricultural approach. In Proceedings of the 2nd International Conference on Computing and Communications Technologies (ICCCT), Chennai, India, 23–24 February 2017; pp. 252–255. [Google Scholar]
- Shilin, W.; Jianli, S.; Xiongkui, H.; Le, S.; Xiaonan, W.C.W.; Zhichong, W.; Yun, L.; Changling, W. Performances evaluation of four typical unmanned aerial vehicles used for pesticide application in China. Int. J. Agric. Biol. Eng. 2017, 10, 22–31. [Google Scholar] [CrossRef] [Green Version]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Fernández-Guisuraga, J.M.; Sanz-Ablanedo, E.; Suárez-Seoane, S.; Calvo, L. Using Unmanned Aerial Vehicles in Postfire Vegetation Survey Campaigns through Large and Heterogeneous Areas: Opportunities and Challenges. Sensors 2018, 18, 586. [Google Scholar] [CrossRef] [Green Version]
- Hartanto, R.; Arkeman, Y.; Hermadi, I.; Sjaf, S.; Kleinke, M. Intelligent Unmanned Aerial Vehicle for Agriculture and Agroindustry. IOP Conf. Ser. Earth Environ. Sci. 2019, 335, 012001. [Google Scholar] [CrossRef]
- Visconti, P.; De Fazio, R.; Velázquez, R.; Del-Valle-Soto, C.; Giannoccaro, N.I. Development of Sensors-Based Agri-Food Traceability System Remotely Managed by A Software Platform for Optimized Farm Management. Sensors 2020, 20, 3632. [Google Scholar] [CrossRef]
- Chirico, G.B.; Bonavolonta, F. Metrology for Agriculture and Forestry 2019. Sensors 2020, 20, 3498. [Google Scholar] [CrossRef]
- Wang, L.; Lan, Y.; Zhang, Y.; Zhang, H.; Tahir, M.N.; Ou, S.; Liu, X.; Chen, P. Applications and Prospects of Agricultural Unmanned Aerial Vehicle Obstacle Avoidance Technology in China. Sensors 2019, 19, 642. [Google Scholar] [CrossRef] [Green Version]
- Chen, P.-C.; Chiang, Y.; Weng, P.-Y. Imaging Using Unmanned Aerial Vehicles for Agriculture Land Use Classification. Agriculture 2020, 10, 416. [Google Scholar] [CrossRef]
- Fahlstrom, P.G.; Gleason, T.J. (Eds.) Introduction to UAV Systems, 4th ed.; John Wiley & Sons, Ltd.: West Sussex, UK, 2012; Chapter 2; pp. 17–31. [Google Scholar]
- Shi, Z.; Li, H.; Lin, H.; Huang, L. A Nano-Quadcopter Formation Flight System Based on UWB Indoor Positioning Technology. In Proceedings of the 13th International Conference on Computer Science & Education (ICCSE), Colombo, Sri Lanka, 8–11 August 2018; pp. 1–4. [Google Scholar]
- Zhang, W.; Li, G.; Baker, C. Dictionary Learning for Radar Classification of Multiple Micro-Drones. In Proceedings of the 2019 International Radar Conference (RADAR), Toulon, France, 23–27 September 2019; pp. 1–4. [Google Scholar]
- Mammarella, M.; Capello, E.; Dabbene, F.; Guglieri, G. Sample-Based SMPC for Tracking Control of Fixed-Wing UAV. IEEE Control. Syst. Lett. 2018, 2, 611–616. [Google Scholar] [CrossRef]
- Zhang, N.; Zhou, X.; Zhang, J.; Huang, L.; Zhao, J. Developing a small UAV platform to detect sheath blight of rice. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 3190–3193. [Google Scholar]
- Kurukularachchi, P.L.; Munasinghe, S.; De Silva, H. Stability analysis for a twin boom H- tail Medium Scale UAV through simulated dynamic model. In Proceedings of the 2016 Moratuwa Engineering Research Conference (MERCon), Moratuwa, Sri Lanka, 5–6 April 2016; pp. 415–420. [Google Scholar]
- Yi, W.; Liming, C.; LingYu, K.; Jie, Z.; Miao, W. Research on application mode of large fixed-wing UAV system on overhead transmission line. In Proceedings of the IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 27–29 October 2017; pp. 88–91. [Google Scholar]
- Czyba, R.; Lemanowicz, M.; Gorol, Z.; Kudala, T. Construction Prototyping, Flight Dynamics Modeling, and Aerodynamic Analysis of Hybrid VTOL Unmanned Aircraft. J. Adv. Transp. 2018, 2018, 1–15. [Google Scholar] [CrossRef]
- Pfeifer, C.; Barbosa, A.; Mustafa, O.; Peter, H.-U.; Brenning, A.; Rümmler, M. Using Fixed-Wing UAV for Detecting and Mapping the Distribution and Abundance of Penguins on the South Shetlands Islands, Antarctica. Drones 2019, 3, 39. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Zhou, W.; Sun, J.; Wen, C.-Y.; Chen, C.-K. Development of Model Predictive Controller for a Tail-Sitter VTOL UAV in Hover Flight. Sensors 2018, 18, 2859. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, X.; Shao, Q.; Li, Y.; Wang, Y.; Song, Q.; Liu, J.; Fan, J.; Yang, F. Application of UAV Remote Sensing for a Population Census of Large Wild Herbivores—Taking the Headwater Region of the Yellow River as an Example. Remote Sens. 2018, 10, 1041. [Google Scholar] [CrossRef] [Green Version]
- Olejnik, A.; Kiszkowiak, Ł.; Rogólski, R.; Chmaj, G.; Radomski, M.; Majcher, M.; Łukasz, O. The Use of Unmanned Aerial Vehicles in Remote Sensing Systems. Sensors 2020, 20, 2003. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McArthur, D.R.; Chowdhury, A.B.; Cappelleri, D.J. Design of the I-BoomCopter UAV for environmental interaction. In Proceedings of the International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5209–5214. [Google Scholar]
- Gomes, K.R.; Hernandez-Lopez, D.; Ortega, J.; Ballesteros, R.; Poblete, T.; Moreno, M.Á. Uncooled Thermal Camera Calibration and Optimization of the Photogrammetry Process for UAV Applications in Agriculture. Sensors 2017, 17, 2173. [Google Scholar] [CrossRef]
- Kim, D.-H.; Go, Y.-G.; Choi, S.-M. An Aerial Mixed-Reality Environment for First-Person-View Drone Flying. Appl. Sci. 2020, 10, 5436. [Google Scholar] [CrossRef]
- Mattar, R.A.; Kalai, R. Development of a Wall-Sticking Drone for Non-Destructive Ultrasonic and Corrosion Testing. Drones 2018, 2, 8. [Google Scholar] [CrossRef] [Green Version]
- Sohail, S.; Nasim, S.; Khan, N.H. Modeling, controlling and stability of UAV Quad Copter. In Proceedings of the International Conference on Innovations in Electrical Engineering and Computational Technologies (ICIEECT), Karachi, Pakistan, 5–7 April 2017; pp. 1–8. [Google Scholar]
- Thu, K.M.; Gavrilov, A. Designing and Modeling of Quadcopter Control System Using L1 Adaptive Control. Procedia Comput. Sci. 2017, 103, 528–535. [Google Scholar] [CrossRef]
- Garcia-Nieto, S.; Velasco-Carrau, J.; Paredes-Valles, F.; Salcedo, J.V.; Fernandez, R.S. Motion Equations and Attitude Control in the Vertical Flight of a VTOL Bi-Rotor UAV. Electronics 2019, 8, 208. [Google Scholar] [CrossRef] [Green Version]
- Budiharto, W.; Chowanda, A.; Gunawan, A.A.S.; Irwansyah, E.; Suroso, J.S. A Review and Progress of Research on Autonomous Drone in Agriculture, Delivering Items and Geographical Information Systems (GIS). In Proceedings of the 2nd World Symposium on Communication Engineering (WSCE), Nagoya, Japan, 20–23 December 2019; pp. 205–209. [Google Scholar]
- Jeziorska, J. UAS for Wetland Mapping and Hydrological Modeling. Remote Sens. 2019, 11, 1997. [Google Scholar] [CrossRef] [Green Version]
- Tsouros, D.C.; Triantafyllou, A.; Bibi, S.; Sarigannidis, P.G. Data Acquisition and Analysis Methods in UAV based Applications for Precision Agriculture. In Proceedings of the 15th International Conference on Distributed Computing in Sensor Systems (DCOSS), Santorini Island, Greece, 29–31 May 2019; pp. 377–384. [Google Scholar]
- Oliveira, H.C.; Guizilini, V.C.; Nunes, I.P.; Souza, J.R. Failure Detection in Row Crops from UAV Images Using Morphological Operators. IEEE Geosci. Remote Sens. Lett. 2018, 15, 991–995. [Google Scholar] [CrossRef]
- Yamamoto, K.; Togami, T.; Yamaguchi, N. Super-Resolution of Plant Disease Images for the Acceleration of Image-based Phenotyping and Vigor Diagnosis in Agriculture. Sensors 2017, 17, 2557. [Google Scholar] [CrossRef] [Green Version]
- Stojcsics, D.; Domozi, Z.; Molnár, A. Automated evaluation of agricultural damage using UAV survey. Acta Univ. Sapientiae Agric. Environ. 2018, 10, 20–30. [Google Scholar] [CrossRef] [Green Version]
- Bassine, F.Z.; Errami, A.; Khaldoun, M. Real Time Video Processing using RGB Remote Sensing by Drone. In Proceedings of the International Conference on Electronics, Control, Optimization and Computer Science (ICECOCS), Kenitra, Morocco, 5–6 December 2018; pp. 1–5. [Google Scholar]
- Hashimoto, N.; Saito, Y.; Maki, M.; Homma, K. Simulation of Reflectance and Vegetation Indices for Unmanned Aerial Vehicle (UAV) Monitoring of Paddy Fields. Remote Sens. 2019, 11, 2119. [Google Scholar] [CrossRef] [Green Version]
- Yanliang, Z.; Qi, L.; Wei, Z. Design and test of a six-rotor unmanned aerial vehicle (UAV) electrostatic spraying system for crop protection. Int. J. Agric. Biol. Eng. 2017, 10, 68–76. [Google Scholar] [CrossRef]
- Lou, Z.; Xin, F.; Han, X.; Lan, Y.; Duan, T.; Fu, W. Effect of Unmanned Aerial Vehicle Flight Height on Droplet Distribution, Drift and Control of Cotton Aphids and Spider Mites. Agronomy 2018, 8, 187. [Google Scholar] [CrossRef] [Green Version]
- Matese, A.; Di Gennaro, S.F. Practical applications of a multisensory UAV platform based on multispectral, thermal and rgb high resolution images in precision viticulture. Agriculture 2018, 8, 116. [Google Scholar] [CrossRef] [Green Version]
- Qin, W.; Xue, X.; Zhang, S.; Gu, W.; Wang, B. Droplet deposition and efficiency of fungicides sprayed with small UAV against wheat powdery mildew. Int. J. Agric. Biol. Eng. 2018, 11, 27–32. [Google Scholar] [CrossRef] [Green Version]
- Marinello, F.; Andrea, P.; Alessandro, C.; Luigi, S. Technical analysis of unmanned aerial vehicles (drones) for agricultural applications. Eng. Rural Dev. 2016, 15, 870–875. [Google Scholar]
- Poley, L.G.; McDermid, G. A Systematic Review of the Factors Influencing the Estimation of Vegetation Aboveground Biomass Using Unmanned Aerial Systems. Remote Sens. 2020, 12, 1052. [Google Scholar] [CrossRef] [Green Version]
- Messina, G.; Modica, G. Applications of UAV Thermal Imagery in Precision Agriculture: State of the Art and Future Research Outlook. Remote Sens. 2020, 12, 1491. [Google Scholar] [CrossRef]
- Ni, J.; Yao, L.; Zhang, J.; Cao, W.; Zhu, Y.; Tai, X. Development of an Unmanned Aerial Vehicle-Borne Crop-Growth Monitoring System. Sensors 2017, 17, 502. [Google Scholar] [CrossRef] [Green Version]
- Panday, U.S.; Pratihast, A.K.; Aryal, J.; Kayastha, R.B. A Review on Drone-Based Data Solutions for Cereal Crops. Drones 2020, 4, 41. [Google Scholar] [CrossRef]
- Wen, S.; Zhang, Q.; Deng, J.; Lan, Y.; Yin, X.; Shan, J. Design and Experiment of a Variable Spray System for Unmanned Aerial Vehicles Based on PID and PWM Control. Appl. Sci. 2018, 8, 2482. [Google Scholar] [CrossRef] [Green Version]
- Ayhan, B.; Kwan, C.; Budavari, B.; Kwan, L.; Lu, Y.; Perez, D.; Li, J.; Skarlatos, D.; Vlachos, M. Vegetation Detection Using Deep Learning and Conventional Methods. Remote Sens. 2020, 12, 2502. [Google Scholar] [CrossRef]
- Raeva, P.L.; Šedina, J.; Dlesk, A. Monitoring of crop fields using multispectral and thermal imagery from UAV. Eur. J. Remote Sens. 2019, 52, 192–201. [Google Scholar] [CrossRef] [Green Version]
- Nhamo, L.; Magidi, J.; Nyamugama, A.; Clulow, A.D.; Sibanda, M.; Chimonyo, V.G.P.; Mabhaudhi, T. Prospects of Improving Agricultural and Water Productivity through Unmanned Aerial Vehicles. Agriculture 2020, 10, 256. [Google Scholar] [CrossRef]
- Yallappa, D.; Veerangouda, M.; Maski, D.; Palled, V.; Bheemanna, M. Development and evaluation of drone mounted sprayer for pesticide applications to crops. In Proceedings of theIEEE Global Humanitarian Technology Conference (GHTC), San Jose, CA, USA, 19–22 October 2017; pp. 1–7. [Google Scholar]
- Chebrolu, N.; Labe, T.; Stachniss, C. Robust Long-Term Registration of UAV Images of Crop Fields for Precision Agriculture. IEEE Robot. Autom. Lett. 2018, 3, 3097–3104. [Google Scholar] [CrossRef]
- Hentschke, M.; Pignaton, E.; Hennig, C.H.; Da Veiga, I.C.G.; Da Veiga, I.G. Evaluation of Altitude Sensors for a Crop Spraying Drone. Drones 2018, 2, 25. [Google Scholar] [CrossRef] [Green Version]
- Chen, P.; Lan, Y.; Huang, X.; Qi, H.; Wang, G.; Wang, J.; Wang, L.; Xiao, H. Droplet Deposition and Control of Planthoppers of Different Nozzles in Two-Stage Rice with a Quadrotor Unmanned Aerial Vehicle. Agronomy 2020, 10, 303. [Google Scholar] [CrossRef] [Green Version]
- Agapiou, A. Vegetation Extraction Using Visible-Bands from Openly Licensed Unmanned Aerial Vehicle Imagery. Drones 2020, 4, 27. [Google Scholar] [CrossRef]
- García-Martínez, H.; Flores, H.; Ascencio-Hernández, R.; Khalil-Gardezi, A.; Tijerina-Chávez, L.; Mancilla-Villa, O.R.; Vázquez-Peña, M.A. Corn Grain Yield Estimation from Vegetation Indices, Canopy Cover, Plant Density, and a Neural Network Using Multispectral and RGB Images Acquired with Unmanned Aerial Vehicles. Agriculture 2020, 10, 277. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben-Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef] [Green Version]
- Gao, P.; Zhang, Y.; Zhang, L.; Noguchi, R.; Ahamed, T. Development of a Recognition System for Spraying Areas from Unmanned Aerial Vehicles Using a Machine Learning Approach. Sensors 2019, 19, 313. [Google Scholar] [CrossRef] [Green Version]
- Gao, D.; Sun, Q.; Hu, B.; Zhang, S. A Framework for Agricultural Pest and Disease Monitoring Based on Internet-of-Things and Unmanned Aerial Vehicles. Sensors 2020, 20, 1487. [Google Scholar] [CrossRef] [Green Version]
- Basso, M.; Stocchero, D.; Henriques, R.V.B.; Vian, A.L.; Bredemeier, C.; Konzen, A.A.; Pignaton, E. Proposal for an Embedded System Architecture Using a GNDVI Algorithm to Support UAV-Based Agrochemical Spraying. Sensors 2019, 19, 5397. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Guo, J.; Liu, C.; Xiong, H.; Chai, L.; He, D. Precision Landing Test and Simulation of the Agricultural UAV on Apron. Sensors 2020, 20, 3369. [Google Scholar] [CrossRef] [PubMed]
- Singh, K.K.; Frazier, A. A meta-analysis and review of unmanned aircraft system (UAS) imagery for terrestrial applications. Int. J. Remote Sens. 2018, 39, 5078–5098. [Google Scholar] [CrossRef]
- Costea, I.M.; Plesca, V. Automatic battery charging system for electric powered drones. In Proceedings of the IEEE 24th International Symposium for Design and Technology in Electronic Packaging (SIITME), Iaşi, Romania, 25–28 October 2018; pp. 377–381. [Google Scholar]
- Flynt, J. How Long Can A Drone Fly? Long Duration Drones—3D Insider. 3D Insider. 2020. Available online: https://3dinsider.com/how-long-can-drones-fly/#:~:text=An%20average%20drone%20will%20only,have%20the%20best%20battery%20life (accessed on 13 August 2020).
- Amarasinghe, A.; Wijesuriya, V.B.; Ganepola, D.; Jayaratne, L. A swarm of crop spraying drones solution for optimising safe pesticide usage in arable lands. In Proceedings of the 17th Conference on Embedded Networked Sensor Systems, New York, NY, USA, 10–13 November 2019; pp. 410–411. [Google Scholar]
- Rohan, A.; Rabah, M.; Talha, M.; Kim, S.H. Development of Intelligent Drone Battery Charging System Based on Wireless Power Transmission Using Hill Climbing Algorithm. Appl. Syst. Innov. 2018, 1, 44. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.J.; Lim, G.J. A Hybrid Battery Charging Approach for Drone-Aided Border Surveillance Scheduling. Drones 2018, 2, 38. [Google Scholar] [CrossRef] [Green Version]
- Campi, T.; Cruciani, S.; Feliziani, M. Wireless Power Transfer Technology Applied to an Autonomous Electric UAV with a Small Secondary Coil. Energies 2018, 11, 352. [Google Scholar] [CrossRef] [Green Version]
- Campi, T.; Cruciani, S.; Maradei, F.; Campi, T. Innovative Design of Drone Landing Gear Used as a Receiving Coil in Wireless Charging Application. Energies 2019, 12, 3483. [Google Scholar] [CrossRef] [Green Version]
- Bin Junaid, A.; Konoiko, A.; Zweiri, Y.; Sahinkaya, M.N.; Seneviratne, L.D. Autonomous Wireless Self-Charging for Multi-Rotor Unmanned Aerial Vehicles. Energies 2017, 10, 803. [Google Scholar] [CrossRef]
- Jung, S.; Jo, Y.; Kim, Y.-J. Flight Time Estimation for Continuous Surveillance Missions Using a Multirotor UAV. Energies 2019, 12, 867. [Google Scholar] [CrossRef] [Green Version]
- Guo, A.; Zhou, Z.; Zhu, X.; Bai, F. Low-Cost Sensors State Estimation Algorithm for a Small Hand-Launched Solar-Powered UAV. Sensors 2019, 19, 4627. [Google Scholar] [CrossRef] [Green Version]
- Alsafasfeh, M.; Abdel-Qader, I.; Bazuin, B.; Alsafasfeh, Q.; Su, W. Unsupervised Fault Detection and Analysis for Large Photovoltaic Systems Using Drones and Machine Vision. Energies 2018, 11, 2252. [Google Scholar]
- Mukhopadhyay, S.; Fernandes, S.; Shihab, M.; Waleed, D.; Awal, M.S. Using Small Capacity Fuel Cells Onboard Drones for Battery Cooling: An Experimental Study. Appl. Sci. 2018, 8, 942. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.J.; Lim, N.; Choi, W.; Lee, Y.; Baek, J.; Park, J.; Lee, S.J.; Lim, N.; Choi, W.; Lee, Y.; et al. Study on Battery Charging Converter for MPPT Control of Laser Wireless Power Transmission System. Electronics 2020, 9, 1745. [Google Scholar] [CrossRef]
- Galimov, M.; Fedorenko, R.; Klimchik, A. UAV Positioning Mechanisms in Landing Stations: Classification and Engineering Design Review. Sensors 2020, 20, 3648. [Google Scholar] [CrossRef] [PubMed]
- Xiaohong, W.; Wenhui, F.; Xinjun, L.; Lizhi, W. Weak Degradation Characteristics Analysis of UAV Motors Based on Laplacian Eigenmaps and Variational Mode Decomposition. Sensors 2019, 19, 524. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sensors and Connectivity in Drones | Electronics for You. 2020. Available online: https://www.electronicsforu.com/technology-trends/sensors-connectivity-drones (accessed on 14 August 2020).
- Rohi, G.; Ejofodomi, O.; Ofualagba, G. Autonomous monitoring, analysis, and countering of air pollution using environmental drones. Heliyon 2020, 6, e03252. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brief, L. Growth Opportunity in Global UAV Market; Las Colinas: Irving, TX, USA, 2011. [Google Scholar]
- Classification of the Unmanned Aerial Systems GEOG 892: Unmanned Aerial Systems. E-Education.Psu.Edu. 2020. Available online: https://www.e-education.psu.edu/geog892/node/5#:~:text=to%20model%20airplanes.-,Close%20range%20UAVs,for%20reconnaissance%20and%20surveillance%20tasks (accessed on 13 August 2020).
- Song, Q.; Shao, Q.; Yue, H. Surveying Wild Animals from Satellites, Manned Aircraft and Unmanned Aerial Systems (UASs): A Review. Remote Sens. 2019, 11, 1308. [Google Scholar]
- Gonzalez, F.; Montes, G.A.; Puig, E.; Johnson, S.; Mengersen, K.; Gaston, K.J. Unmanned Aerial Vehicles (UAVs) and Artificial Intelligence Revolutionizing Wildlife Monitoring and Conservation. Sensors 2016, 16, 97. [Google Scholar] [CrossRef] [Green Version]
- Rowe, E.; Dawkins, M.S.; Gebhardt-Henrich, S.G. A Systematic Review of Precision Livestock Farming in the Poultry Sector: Is Technology Focussed on Improving Bird Welfare? Animals 2019, 9, 614. [Google Scholar] [CrossRef] [Green Version]
- Srivastava, K.; Pandey, P.C.; Sharma, J.K. An Approach for Route Optimization in Applications of Precision Agriculture Using UAVs. Drones 2020, 4, 58. [Google Scholar] [CrossRef]
- Hinas, A.; Roberts, J.M.; Gonzalez, F. Vision-Based Target Finding and Inspection of a Ground Target Using a Multirotor UAV System. Sensors 2017, 17, 2929. [Google Scholar] [CrossRef] [Green Version]
- Yan, Y.; Shi, W.; Zhang, X. Design of UAV wireless power transmission system based on coupling coil structure optimization. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 1–13. [Google Scholar] [CrossRef]
- Barbedo, J.; Koenigkan, L.; Santos, P.; Ribeiro, A.R.B. Counting Cattle in UAV Images—Dealing with Clustered Animals and Animal/Background Contrast Changes. Sensors 2020, 20, 2126. [Google Scholar]
- Mangewa, L.J.; Ndakidemi, P.; Munishi, L.K. Integrating UAV Technology in an Ecological Monitoring System for Community Wildlife Management Areas in Tanzania. Sustainability 2019, 11, 6116. [Google Scholar] [CrossRef] [Green Version]
- Stateras, D.; Kalivas, D. Assessment of Olive Tree Canopy Characteristics and Yield Forecast Model Using High Resolution UAV Imagery. Agriculture 2020, 10, 385. [Google Scholar] [CrossRef]
- Atoev, S.; Kwon, K.-R.; Lee, S.-H.; Moon, K.-S. Data analysis of the MAVLink communication protocol. In Proceedings of the International Conference on Information Science and Communications Technologies (ICISCT), Tashkent, Uzbekistan, 2–4 November 2017; pp. 1–3. [Google Scholar]
- Shafi, U.; Mumtaz, R.; García-Nieto, J.; Hassan, S.A.; Zaidi, S.A.R.; Iqbal, N.; Shafi, U.; Mumtaz, R.; García-Nieto, J.; Hassan, S.A.; et al. Precision Agriculture Techniques and Practices: From Considerations to Applications. Sensors 2019, 19, 3796. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Meivel, S.; Maheswari, S. Optimization of Agricultural Smart System using Remote Sensible NDVI and NIR Thermal Image Analysis Techniques. In Proceedings of the International Conference for Emerging Technology (INCET), Belgaum, India, 5–7 June 2020; pp. 1–10. [Google Scholar]
- Xin, F.; Zhao, J.; Zhou, Y.; Wang, G.; Han, X.; Fu, W.; Deng, J.; Lan, Y. Effects of Dosage and Spraying Volume on Cotton Defoliants Efficacy: A Case Study Based on Application of Unmanned Aerial Vehicles. Agronomy 2018, 8, 85. [Google Scholar] [CrossRef] [Green Version]
- Sarghini, F.; Visacki, V.; Sedlar, A.; Crimaldi, M.; Cristiano, V.; De Vivo, A. First measurements of spray deposition obtained from UAV spray application technique. In Proceedings of the IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), Portici, Italy, 24–26 October 2019; pp. 58–61. [Google Scholar]
- Cahn, M.D.; Johnson, L.F. New Approaches to Irrigation Scheduling of Vegetables. Horticulturae 2017, 3, 28. [Google Scholar] [CrossRef] [Green Version]
- Sharma, L.K.; Bali, S.K. A Review of Methods to Improve Nitrogen Use Efficiency in Agriculture. Sustainability 2018, 10, 51. [Google Scholar] [CrossRef] [Green Version]
- Al-Thani, N.; Albuainain, A.; Alnaimi, F.; Zorba, N. Drones for Sheep Livestock Monitoring. In Proceedings of the IEEE 20th Mediterranean Electrotechnical Conference (MELECON), Palermo, Italy, 16–18 June 2020; pp. 672–676. [Google Scholar]
- Sarwar, F.; Griffin, A.; Periasamy, P.; Portas, K.; Law, J. Detecting and Counting Sheep with a Convolutional Neural Network. In Proceedings of the 15th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Auckland, New Zealand, 27–30 November 2018; pp. 1–6. [Google Scholar]
- Rahnemoonfar, M.; Dobbs, D.; Yari, M.; Starek, M.J. DisCountNet: Discriminating and Counting Network for Real-Time Counting and Localization of Sparse Objects in High-Resolution UAV Imagery. Remote Sens. 2019, 11, 1128. [Google Scholar] [CrossRef] [Green Version]
- Fu, Z.; Jiang, J.; Gao, Y.; Krienke, B.; Wang, M.; Zhong, K.; Cao, Q.; Tian, Y.; Zhu, Y.; Cao, W.; et al. Wheat Growth Monitoring and Yield Estimation based on Multi-Rotor Unmanned Aerial Vehicle. Remote Sens. 2020, 12, 508. [Google Scholar] [CrossRef] [Green Version]
Figure 1.
Diagram of the agricultural control system.

Figure 2.
Approximate number of articles published on agricultural UAV from 2011–2020.

Figure 3.
Types depending on size [15]. Nano (a). Micro (b). Mini (c). Small (d); Medium (e). Large (f). (reproduced from [15], with permission from Wiley).


Figure 5.
Types of rotary wings. Single-dual rotors [26] (a), Tricopter [30] (b), Quadcopter [28] (c), Hexacopter [29] (d), and Octocopter [9] (e).

Figure 6.
Quadcopter Flight Configurations. Plus configuration (a) and Cross configuration (b) (photo illustrated by the authors).
Figure 6.
Quadcopter Flight Configurations. Plus configuration (a) and Cross configuration (b) (photo illustrated by the authors).

Figure 7.
Different ways to power up a UAV based on the charging type.

Figure 8.
Wireless power transmission system [73] (a). Autonomous wireless charging system [74] (b). Low-cost solar-powered UAV [76] (c). Small capacity and less expensive fuel-cell on a UAV [78] (d).

Figure 10.
Model UAV based crop monitoring system [49].
Figure 10.
Model UAV based crop monitoring system [49].

Figure 11.
Photo comprising several calves [92] (a). Aerial detection of the objects, where the objects and backgrounds are highly imbalanced. [104] (b).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Some research works of the published articles about UAVs’ applications on precision agriculture in recent years.
Table 1.
Some research works of the published articles about UAVs’ applications on precision agriculture in recent years.
| No. | Author | UAV Type | Research Work | Year Published | Possible Future Agrarian Opportunity |
|---|---|---|---|---|---|
| 1. | Kim [1] | - | Analyzed the most advanced leaning and possible applications relevant to agrarian UAVs, control processes, facilities, and improvements. Plus, UAVs’ application in practical agricultural environments and the eventual development of the UAVs are presented. | 2019 | Crop monitoring and agricultural spraying |
| 2. | Popescu [2] | Quad-rotor | Proposed a hierarchic arrangement typically based on the effective co-operation among UAVs and WSNs (Wireless Sensor Network) for agricultural crop monitoring. | 2019 | Crop monitoring |
| 3. | Giordan [3] | - | Described the monitoring systems, standard procedures, and practical possibilities in various engineering geology objectives. | 2020 | Crop monitoring |
| 4. | Spoorthi [6] | Quadcopter | Developed a renovated UAV that comfortably carries pesticides to sprinkle all over the area and lessens producers’ stress. | 2017 | Agricultural spraying |
| 5. | Shilin [7] | 3 Single rotor UAVs and a six-rotor UAV | Described the enforcement evaluation of four typical UAVs applied for pesticide applications in China. | 2017 | Agricultural spraying |
| 6. | Tsouros [8] | - | Analyzed the modern applications of UAVs concerning precision agriculture. | 2019 | Crop monitoring and agricultural spraying |
| 7. | Fernández-Guisuraga [9] | Octocopter | Evaluated the possibilities and difficulties of utilizing UAVs to obtain multispectral ortho-mosaics at an ultra-high-resolution, which is beneficial for monitoring broad and various scorched areas. | 2018 | Crop monitoring |
| 8. | Hartanto [10] | - | Focused on the rational potential of utilizing a UAV for farming and agro-industry to increase economic productivity and diminishing the entire expenses proportionately. | 2019 | Crop monitoring and livestock farming |
| 9. | Chen [14] | Quadcopter and fixed-wing | Utilized a UAV to take high-resolution images of crop fields. And software-based image analysis was conducted to allocate areas. | 2020 | Crop monitoring |
| 10. | Fahlstrom [15] | - | Succinctly summarized the specific types and applications of UAS and provided a functional context for the system requirements that drive the design tradeoffs. | 2012 | Crop monitoring |
| 11. | Shi [16] | Nano-quadcopter | Designed and executed a nano quadcopter aviation system scientifically based on the UWB (Ultra-wideband) indoor positioning high tech. | 2018 | Livestock farming |
| 12. | Zhang [17] | Micro UAVs | A system for the disclosure and arrangement of multiple micro UAVs based on their micro-Doppler trademarks through dictionary learning is proposed. | 2019 | Livestock farming |
| 13. | Mammarella [18] | Fixed-wing | A direction and tracing control approach for UAV gyro-pilots is appropriately presented for multi-scenario mapping. | 2018 | Crop monitoring |
| 14. | Zhang [19] | Small UAV | Adequately developed a stable UAV platform to identify sheath blight in rice-fields. | 2017 | Crop monitoring |
| 15. | Kurukularachchi [20] | Medium UAV (Twin Boom H-tail) | Formed the extensive Stability analysis for a medium-scale UAV concerning various flying conditions. | 2016 | Crop monitoring |
| 16. | Yi [21] | Large Fixed-wing UAV | Employed a multi-dimensional approach to accurately analyzing the UAV system to exhibit its expediency in diverse application situations of overhead transmission lines. | 2017 | Crop monitoring |
| 17. | Czyba [22] | Hybrid VTOL (Vertical Take-off Landing) | Highlighted the design method of a UAV’s vertical takeoff and landing, along with realistically portraying the airframe manufacture, geometrical modeling, and aerodynamic analysis for appropriate fight techniques. | 2018 | Crop monitoring |
| 18. | Pfeifer [23] | Fixed-wing | Applied a battery-powered UAV to survey the penguin colonies on two different remote coasts. | 2019 | Livestock farming |
| 19. | Li [24] | VTOL UAV | Presented an MPC (Model Predictive Controller) for position control of vertical take-off and landing (VTOL) UAV in the hovering flight. | 2018 | Crop monitoring and livestock farming |
| 20. | Guo [25] | Fixed-wing | Utilized UAVs to accomplish an entire population census of massive wild herbivores in Maduo. | 2018 | Livestock farming |
| 21. | Olejnik [26] | Small Helicopter | Described the feasibility of utilizing a small helicopter to accomplish specific tasks by employing a remote sensing system. Besides, appropriately applied this system to observe the gas transmission and standard configuration of networks. | 2020 | Crop monitoring and livestock farming |
| 22. | McArthur [27] | Tricopter (I-BoomCopter) | Introduced the renovated design of a UAV specifically for environmental interactions. | 2017 | Crop monitoring and livestock farming |
| 23. | Ribeiro-Gomes [28] | Quad-rotor (Micro drone MD4-1000) | Utilized thermal camera analysis and possible escalation of the photogrammetric system for desired UAV operations in modern agriculture. | 2017 | Livestock farming |
| 24. | Kim [29] | Hexacopter | An aerial mixed reality condition for first-person view UAV soaring is meticulously planned to efficiently implement an exuberant experience and a secure setting for UAV users by building some extra pragmatic obstacles while operating a UAV in an open field. | 2020 | Crop monitoring |
| 25. | Mattar [30] | tri-rotor | Proposed a modern concept for the current limitations of utilizing a UAV in possible combination with a visual inspection system, and any contact-based method. | 2018 | Crop monitoring and livestock farming |
| 26. | Sohail[31] | Quadcopter | Designed, executed, and tested a stable UAV that can be universally employed for scrutiny and continuous monitoring of a vague area. | 2017 | Crop monitoring |
| 27. | Thu [32] | Quadcopter | Presented the modern design and innovative command system of a UAV utilizing the L1 adaptive control design method. The control guidelines are methodically defined soundly based on the act and tenacity metrics fixed by the designer. | 2016 | Crop monitoring and livestock farming |
| 28. | Garcia-Nieto [33] | VTOL Bi-Rotor UAV | Gathered the innovative idea and effective implementation of the control method that enables a UAV to operate a VTOL maneuver adopting two tilting rotors. | 2019 | Crop monitoring and livestock Farming |
| 29. | Budiharo [34] | Multi-rotor (quad-rotor) | Presented an outline of UAVs’ study and practical application for agriculture, delivering things, and GIS. And typically described pesticide spraying and field mapping. | 2019 | Crop monitoring and agricultural spraying |
| 30. | Jeziorska[35] | Fixed-wing and multi-rotor | Reviewed the operating system, enactment, scientific adaptability, and information processing methods, which are necessary for wetland monitoring and hydrological perspective. | 2019 | Crop monitoring |
| 31. | Tsouros[36] | - | Abstracted the data acquisition systems and technologies to collect accurate pictures in UAV based agriculture and highlighted the benefits and hindrances. | 2019 | Crop monitoring and livestock farming |
| 32. | Oliveira [37] | - | Presented an ideal technique for DF from aerial images, acquired by utilizing a UAV competent from assembling high-resolution RGB pictures for the failure apprehension in crops. | 2018 | Crop monitoring |
| 33. | Yamamoto [38] | - | Implemented a super-resolution technique to the low-resolution pictures of tomato diseases to retrieve complete data and administered disease classification. | 2017 | Crop monitoring |
| 34. | Stojcsics [39] | - | Employed the automated evaluation of agrarian damage by utilizing the UAV survey. | 2018 | Crop monitoring |
| 35. | Bassine [40] | - | Progressively developed a real-time technique that strongly distinguishes evergreens in perception and maps having data regarding trees’ well-being, branch thickness, and trees’ distribution. | 2018 | Crop monitoring |
| 36. | Hashimoto [41] | - | Highlighted the accurate simulation of reflectively and vegetation indices for the paddy fields | 2019 | Crop monitoring |
| 37. | Yanliang [42] | Six-rotor UAV | Uniquely designed and experimented with a multi-rotor UAV electrostatic sprinkling system for crop safety. | 2017 | Agricultural spraying |
| 38. | Lou [43] | Quad-rotor | Explained the distinctive features of droplet dispersion and drift capableness on several destructive insects, and also illustrated the affection and consumption of cotton leaves during UAV sprinkling. | 2018 | Agricultural spraying |
| 39. | Fu [44] | Multi-rotor | Highlighted the effectiveness regarding a multi-spectral camera installed on a UAV for observing wheat growth indices. | 2020 | Crop monitoring |
| 40. | Qin [45] | Small UAV | Analyzed the direct influence of different UAV sprinkling parameters based on height and fluid concentrations. The study field also highlights the displacement of droplets on the wheat canopy and the suppression of dusty mildew. | 2018 | Agricultural spraying |
| 41. | Marinello [46] | Fixed-wing, helicopters, multicopters | Proposed a technical analysis of UAVs’ ultimate act to assume the exact aptness for agricultural operations. | 2016 | Crop monitoring and livestock farming |
| 42. | Poley [47] | - | Explained that spectral and structural data imagery can evaluate vegetation biomass in a mixture of perspectives correctly. | 2020 | Crop monitoring |
| 43. | Messina [48] | - | Reviewed the thermal remote sensing in agriculture and highlighted the recent UAV purposes and future opportunities. | 2020 | Crop monitoring |
| 44. | Ni [49] | Quadcopter (DJI phantom) | Described a crop monitoring technique that efficiently utilizes a UAV as an operating platform. | 2016 | Crop monitoring |
| 45. | Panday [50] | Multi-rotor and fixed-wing | Highlighted UAV based data solutions and the economic importance of crop productivity in low-income nations for a small-scale farming. And also portrayed the possible advantages and barriers of UAV based crop monitoring. | 2020 | Crop monitoring |
| 46. | Wen [51] | Quad-rotor | Portrayed the modern architecture and analysis of a shifting sprinkling system for UAVs. | 2018 | Agricultural spraying |
| 47. | Ayhan [52] | - | Proposed an object-based vegetation detection method utilizing NDVI formula and machine learning knowledge. | 2020 | Crop monitoring |
| 48. | Raeva[53] | - | Highlighted the intensive monitoring of crops by employing multi-spectral and thermal imagery from the UAV. | 2018 | Crop monitoring and livestock farming |
| 49. | Nhamo [54] | - | Highlighted UAV’s role regarding NDVI in evaluating crop health, evaporation, water stress, etc. | 2020 | Crop monitoring |
| 50. | Yallappa D. [55] | Hexacopter | Developed UAV mounted sprayer for pesticide utilization. | 2017 | Agricultural spraying |
| 51. | Chebrolu[56] | - | Presented a process that comprises the crop arrangement by employing harmful data about missing crops and utilizing the matching data. Plus, the usage of UAV 3-D imaginary is also appropriately represented. | 2018 | Crop monitoring and livestock farming |
| 52. | Hentschke [57] | Octocopter | Highlighted altitude patronage for the liquid deployment device aperture control in a UAV applied in agriculture. | 2018 | Agricultural spraying |
| 53. | Chen [58] | Quadrotor | Examined that choosing a nozzle with a comparably small size for UAV can develop planthoppers’ control impact. | 2020 | Agricultural spraying |
| 54. | Agapiou [59] | - | Explored various visible vegetation indices in diverse conditions by applying different UAV sensors and cameras to verify the execution. | 2020 | Crop monitoring |
| 55. | García-Martínez [60] | Quadcopter | To accurately determine the crop yield, various multispectral and RGB vegetation indices were sufficiently examined. | 2020 | Crop monitoring |
| 56. | Manfreda [61] | - | Overviewed the current study and purposes of UAS in general and agricultural monitoring to know the future possibilities, scopes, improvements, and barriers. | 2018 | Crop monitoring |
| 57. | Gao [62] | - | Developed a machine learning system for various kinds of farm areas and orchards regarding the agricultural spraying system. | 2018 | Agricultural spraying |
| 58. | Gao [63] | Quad-rotor | Outlined a structure to provide insights into the special connection among pests, diseases, and weather parameters. | 2020 | Crop monitoring |
| 59. | Basso [64] | Quad-rotor | Proposed a model of an ingrained real-time UAV spraying control method, supported by imminent image processing. | 2019 | Crop monitoring and agricultural spraying |
| 60. | Guo [65] | Quad-rotor | Developed a mathematical landing experiment and simulation of the agricultural UAV. | 2020 | Crop monitoring and livestock farming |
| 61. | Kunwar K. Singh [66] | - | Reviewed the fundamental analysis and methodological advancements of UAS imagery for terrestrial purposes. | 2018 | Crop monitoring |
Table 2.
Different types, speeds and altitudes of some regularly used UAV.
| Types | UAV-CR | UAV-SR | UAV-E |
|---|---|---|---|
| Range | <30 km | <70 km | <500 km |
| Durability | <4 h | <6 h | <36 h |
| Mass | <150 kg | <200 kg | <1250 kg |
| Speed | <7 m·s−1 | <135 m·s−1 | <200 m·s−1 |
| Climb rate | ≤3000 m | ≤3000 m | ≤8000 m |
| Altitude | <1000 ft | <50,000 ft | <65,000 ft |
| Weight-load capacity | <6 lbs | <3800 lbs | <1900 lbs |
Table 3.
Some essential UAV Hardware elements and applications.
| Name of the Element | Objective | Reference |
|---|---|---|
| Camera (RGB/Infrared/Thermal) | Capturing images | [1,2,3,4,5,6,7,8,9,10,13,15,16,18,21,23,25,26,27,28,29,31,34,35,36,37,38,39,40,41,42,43,44,46,47,48,49,50,51,52,53,54,55,56,57,59,60,61,62,63,64,65,66,69,70,72,73,74,77,84,85,86,87,88,89,90,91,92,93,94,95,96,97] |
| BLDC | Movement control | [22,31,55,81,89] |
| ESC | Adjusting BLDC velocity | [6,22,23,24,27,33,55,70,78,83,87] |
| GPS | Navigating | [1,3,5,6,8,9,10,11,13,15,16,18,23,25,26,27,28,29,30,31,33,35,36,39,40,43,44,45,47,48,50,51,54,56,57,58,60,63,65,69,70,73,74,78,83,86,89,90,91,92,93,94,95,96,97,98] |
| WSN | Monitoring circumstances | [4,5,11,55,61,94,96,99] |
| Altimeter | Measuring altitude | [4,83,90] |
| Accelerometer | Acceleration grading | [3,4,6,9,16,18,26,31,33,57,74,88,89,90,95,96] |
| Gyroscopes | Maintaining orientation and angular velocity. | [3,6,9,13,26,31,33,74,76,83,89,90,93] |
| Magnetometer | Measuring the strength and direction of the magnetic field. | [3,6,31,33,57,74,76,95,96] |
| Battery | Retaining power | [1,3,4,5,6,7,8,9,10,11,12,15,18,22,23,24,25,27,28,30,31,33,34,42,44,46,49,50,55,58,62,63,65,67,69,70,71,72,73,74,75,78,79,80,81,83,87,89,91,96] |
Table 4.
Some commonly used UAV Software elements and applications.
| Name of the Element | Objective | References |
|---|---|---|
| Adobe Photoshop | Distortion emendation | [8,36] |
| GIS | Capturing and analyzing spatial and geographic data. | [4,34,39,50,86,89,93,94,96,98] |
| QGIS | Vegetation calculation | [8,23,28,36,37,60] |
| ArcGIS | Connecting humans, locations, and information by utilizing interactive maps | [9,14,25,35,66,97] |
| MAVLink | Communicating with UAVs | [1,95] |
| Python | Controlling | [38,57,64,77,87,89,97] |
| MATLAB | Image-processing and analysis | [1,3,5,8,18,20,24,28,31,33,36,39,40,51,57,60,62,64,70,73,91,96] |
| Pix4D | Vegetation calculation and 3-D models construction | [14,25,35,36,60,63,66,94] |
| C++ | Image processing | [24,40,64,90] |
Table 5.
More vegetation indices related to crop monitoring.
| Index | Full Form | Formula |
|---|---|---|
| TNDVI | Transformed NDVI | ((NIR−RED)/+0.5) 0.5 |
| RVI | Ratio Vegetation Index | (NIR/RED) |
| EVI | Enhanced Vegetation Index | 2.5 (NIR−RED)/(NIR + 6 RED−7.5 BLUE + 1) |
| SAVI | Soil Adjusted Vegetation Index | 1.5 (NIR−RED)/(NIR + RED + 0.5) |
| GSAVI | Green SAVI | 1.5 (NIR−GREEN)/(NIR + GREEN + 0.5) |
| OSAVI | Optimized SAVI | 1.16 (NIR−RED)/(NIR + RED + 0.16) |
| RDVI | Renormalized Difference Vegetation Index | (NIR−RED)/(NIR + RED)0.5 |
Table 6.
Analysis of different spraying speeds of UAVs.
| UAV Type | Nozzle Numbers | Nozzle Type | Spraying Speed | Maximum Load | Maximum Speed (Full Load) | References |
|---|---|---|---|---|---|---|
| 3WQF120-12 | 2 | LU120-02 | 0.80 L/min | 12 L | 5 ms−1 | [7] |
| 3CD-15 | 4 | Flat-fan 01 | 0.54 L/min | 15 L | 6 ms−1 | [7] |
| WSZ-0610 | 2 | Centrifugal atomizer | 0.72 L/min | 10 L | 4 ms−1 | [7] |
| HY-B-15L | 5 | Four flat-fan and one cone | 0.38 L/min | 15 L | 4.5 ms−1 | [7] |
| Six-rotor UAV | 4 | Fan-shaped | 3.15 L/min | 10 kg | 16 ms−1 | [42] |
| Jifei P20 UAV | 4 | Centrifugal nozzle | 200–800 mL/min | 6–10 L | 8 ms−1 | [43] |
| N-3 UAV | 2 | Rotary atomizer | 15 L·hm−2 | 25 L | 4 ms−1 | [45] |
| Knapsack-type electric fog sprayer 3WBD-16L | 1 | Fan-type nozzle | 300 L·hm−2 | 20 L | 0.8–1 ms−1 | [45] |
| Hexa-copter | 4 | Flat-fan | 2.5 L/min | 5 L | 3.6 kmh−1 | [55] |
| Freedom Eagle 1s (Quad-rotor) | 4 | LU110-01 | 1.04 L/min | 10 L | 3.3 ms−1 | [58] |
| Six rotor | 6 | Hollow Conical | 680 mL/min | 30 L | 5 ms−1 | [98] |
| Single rotor | 3 | LU120-01 | 300 mL/min | 12 L | 4–5 ms−1 | [58,98] |
| Single rotor | 3 | LU120-02 | 2.52 L/min | 12 L | 4–5 ms−1 | [58,98] |
| DJI AGRAS MG 1S | 4 | XR11001 (Flat-fan) | 0.43 L/min | 10 L | 8 ms−1 | [99] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Rahman, M.F.F.; Fan, S.; Zhang, Y.; Chen, L. A Comparative Study on Application of Unmanned Aerial Vehicle Systems in Agriculture. Agriculture 2021, 11, 22. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11010022
AMA Style
Rahman MFF, Fan S, Zhang Y, Chen L. A Comparative Study on Application of Unmanned Aerial Vehicle Systems in Agriculture. Agriculture. 2021; 11(1):22. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11010022
Chicago/Turabian StyleRahman, Mohammad Fatin Fatihur, Shurui Fan, Yan Zhang, and Lei Chen. 2021. "A Comparative Study on Application of Unmanned Aerial Vehicle Systems in Agriculture" Agriculture 11, no. 1: 22. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11010022
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.