
How Can Unmanned Aerial Vehicles Be Used for Detecting Weeds in Agricultural Fields?

 , , and
, , and
Abstract
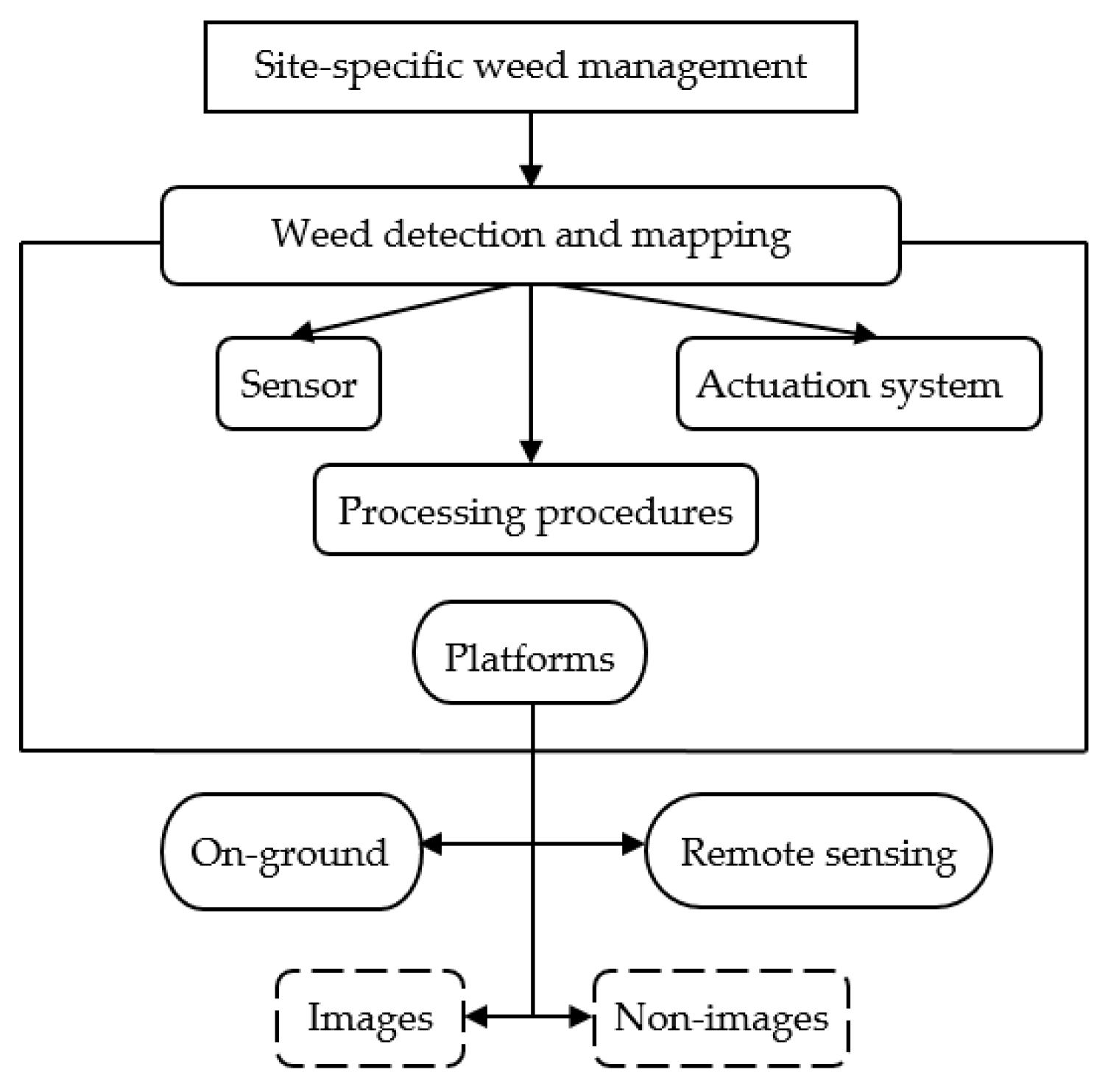
:1. Introduction
2. Materials and Methods
2.1. Search Strategy
2.2. Selection Criteria
2.3. Data Extraction
2.4. Data Synthesis
3. Results
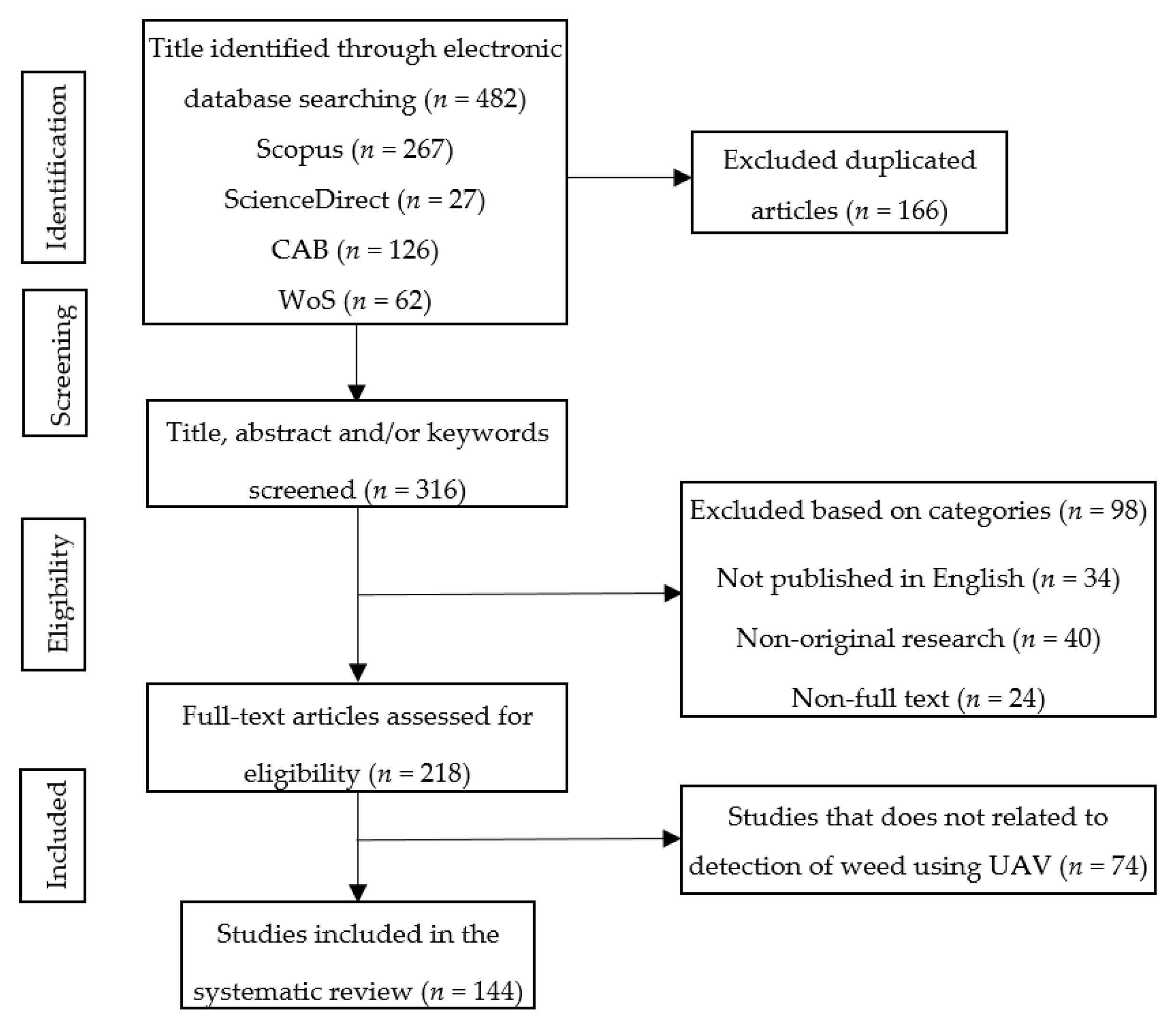
3.1. Selection of Eligible Articles
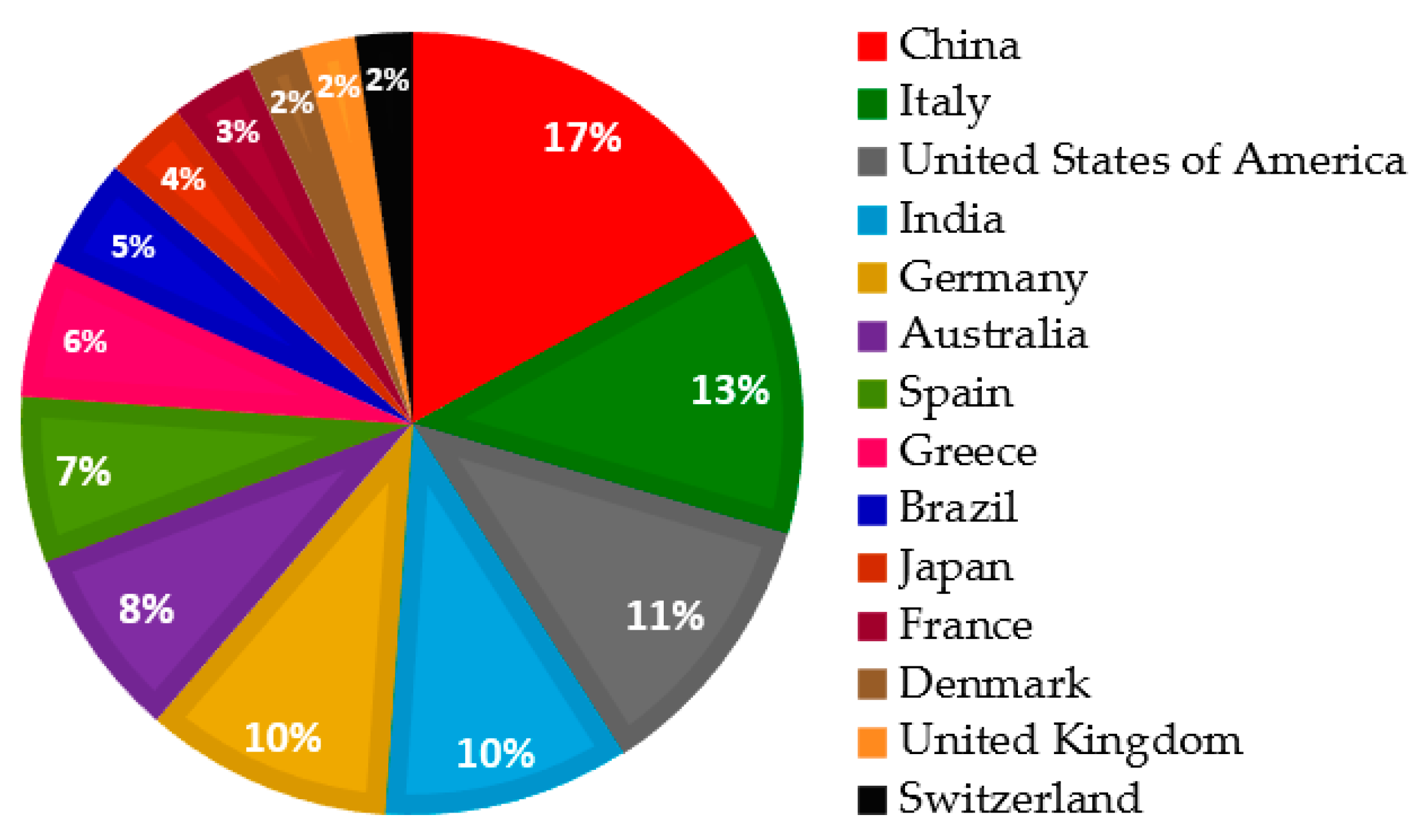
3.2. Current Trend of UAV Applications for Detection of Weed
3.2.1. Spectral Differences of Weed Detection
3.2.2. Types of Aerial Images on Weed Detection
3.2.3. Effect of Spatial and Spectral Resolutions on Weed Detection
3.2.4. Algorithms and Classification Techniques for Weed Mapping
3.3. Advantages and Disadvantages for Each Sensor
3.4. Advantages and Disadvantages for Each Algorithm
3.5. Benefit of UAV to the Agricultural Industry
3.6. Future Trend of UAV Applications for Detection of Weed
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, A.; Zhang, W.; Wei, X. A review on weed detection using ground-based machine vision and image processing techniques. Comput. Electron. Agric. 2019, 158, 226–240. [Google Scholar] [CrossRef]
- Ranjan, P.N.; Ram, C.J.; Anurag, T.; Nilesh, J.; Kumar, P.B.; Suresh, Y.; Kumar, S.; Rahul, K. Breeding for herbicide tolerance in crops: A review. Res. J. Biotechnol. 2020, 15, 154–162. [Google Scholar]
- Hauvermale, A.L.; Sanad, M.N.M.E. Phenological plasticity of wild and cultivated plants. In Plant Communities and Their Environment; IntechOpen: London, UK, 2019. [Google Scholar]
- Smith, J.D.; Dubois, T.; Mallogo, R.; Njau, E.F.; Tua, S.; Srinivasan, R. Host range of the invasive tomato pest Tuta absoluta Meyrick (Lepidoptera: Gelechiidae) on Solanaceous crops and weeds in Tanzania. Fla. Entomol. 2018, 101, 573–579. [Google Scholar] [CrossRef] [Green Version]
- Brêda-Alves, F.; Militão, F.P.; de Alvarenga, B.F.; Miranda, P.F.; de Oliveira Fernandes, V.; Cordeiro-Araújo, M.K.; Chia, M.A. Clethodim (herbicide) alters the growth and toxins content of Microcystis aeruginosa and Raphidiopsis raciborskii. Chemosphere 2020, 243, 1–9. [Google Scholar] [CrossRef]
- Mantle, P. Comparative ergot alkaloid elaboration by selected plecten-chymatic mycelia of Claviceps purpurea through sequential cycles of axenic culture and plant parasitism. Biology 2020, 9, 41. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Adkins, S.W.; Shabbir, A.; Dhileepan, K. Parthenium Weed: Biology, Ecology and Management; CABI: Wallingford, UK, 2018; Volume 7. [Google Scholar]
- Alvarez, D.O.; Mendes, K.F.; Tosi, M.; De Souza, L.F.; Cedano, J.C.C.; Falcão, N.P.D.S.; Dunfield, K.; Tsai, S.M.; Tornisielo, V.L. Sorption-desorption and biodegradation of sulfometuron-methyl and its effects on the bacterial communities in Amazonian soils amended with aged biochar. Ecotoxicol. Environ. Saf. 2021, 207, 111222. [Google Scholar] [CrossRef] [PubMed]
- Beasley, V.R. Direct and Indirect Effects of Environmental Contaminants on Amphibians, 2nd ed.; Elsevier Inc.: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Kim, K.H.; Kabir, E.; Jahan, S.A. Exposure to pesticides and the associated human health effects. Sci. Total Environ. 2017, 575, 525–535. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Wu, Z.; Zhao, B.; Fan, C.; Shi, S. Weed and corn seedling detection in field based on multi feature fusion and support vector machine. Sensors 2021, 21, 212. [Google Scholar] [CrossRef]
- Esposito, M.; Crimaldi, M.; Cirillo, V.; Sarghini, F.; Maggio, A. Drone and sensor technology for sustainable weed management: A review. Chem. Biol. Technol. 2021, 8, 1–11. [Google Scholar]
- Somerville, G.J.; Sønderskov, M.; Mathiassen, S.K.; Metcalfe, H. Spatial modelling of within-field weed populations: A review. Agronomy 2020, 10, 1044. [Google Scholar] [CrossRef]
- Al-Samarai, G.F.; Mahdi, W.M.; Al-Hilali, B.M. Reducing environmental pollution by chemical herbicides using natural plant derivatives–allelopathy effect. Ann. Agric. Environ. Med. 2018, 25, 449–452. [Google Scholar] [CrossRef] [PubMed]
- Jensen, H.; Jacobsen, L.; Pedersen, S.; Tavella, E. Socioeconomic impact of widespread adoption of precision farming and controlled traffic systems in Denmark. Precis. Agric. 2012, 13, 661–677. [Google Scholar] [CrossRef]
- Jin, X.; Che, J.; Chen, Y. Weed Identification Using Deep Learning and Image Processing in Vegetable Plantation. IEEE Access 2021, 9, 10940–10950. [Google Scholar] [CrossRef]
- Bahuguna, S.; Anchal, S.; Guleria, D.; Devi, M.; Kumar, D.; Kumar, R.; Kumar, A. Unmanned aerial vehicle-based multispectral remote sensing for commercially important aromatic crops in India for its efficient monitoring and management. J. Indian Soc. Remote Sens. 2021, 1–11, in press. [Google Scholar]
- Rasmussen, J.; Nielsen, J. A novel approach to estimating the competitive ability of Cirsium arvense in cereals using unmanned aerial vehicle imagery. Weed Res. 2020, 60, 150–160. [Google Scholar] [CrossRef]
- Matikainen, L.; Karila, K.; Hyyppä, J.; Puttonen, E.; Litkey, P.; Ahokas, E. Feasibility of multispectral airborne laser scanning for land cover classification, road mapping and map updating. In Proceedings of the The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Jyväskylä, Finland, 25–27 October 2017; Volume 42(3/W3). [Google Scholar]
- Yano, I.H.; Santiago, W.E.; Alves, J.R.; Mota, L.T.M.; Teruel, B. Choosing classifier for weed identification in sugarcane fields through images taken by UAV. Bulg. J. Agric. Sci. 2017, 23, 491–497. [Google Scholar]
- Olson, D.; Anderson, J. Review on unmanned aerial vehicles, remote sensors, imagery processing, and their applications in agriculture. J. Agron. 2021, 113, 971–992. [Google Scholar] [CrossRef]
- Warner, T.A.; Skowronski, N.S.; Gallagher, M.R. High spatial resolution burn severity mapping of the New Jersey Pine Barrens with WorldView-3 near-infrared and shortwave infrared imagery. Int. J. Remote Sens. 2017, 38, 598–616. [Google Scholar] [CrossRef]
- Orlikova, L. Using Neural Networks for the Extraction of Built-Up Areas from Sentinel-2. In Proceedings of the 8th International Workshop on Computer Science and Engineering (WCSE 2018), Bangkok, Thailand, 28–30 June 2008; pp. 308–312. [Google Scholar]
- Varghese, D.; Radulović, M.; Stojković, S.; Crnojević, V. Reviewing the Potential of Sentinel-2 in Assessing the Drought. Remote Sens. 2021, 13, 3355. [Google Scholar] [CrossRef]
- Abascal Zorrilla, N.; Vantrepotte, V.; Gensac, E.; Huybrechts, N.; Gardel, A. The advantages of Landsat 8-OLI-derived suspended particulate matter maps for monitoring the subtidal extension of Amazonian coastal mud banks (French Guiana). Remote Sens. 2018, 10, 1733. [Google Scholar] [CrossRef] [Green Version]
- Malamiri, H.R.G.; Aliabad, F.A.; Shojaei, S.; Morad, M.; Band, S.S. A study on the use of UAV images to improve the separation accuracy of agricultural land areas. Int. J. Remote Sens. 2021, 184, 106079. [Google Scholar]
- Rodríguez, J.; Lizarazo, I.; Prieto, F.; Angulo-Morales, V. Assessment of potato late blight from UAV-based multispectral imagery. Comput. Electron. Agric. 2021, 184, 106061. [Google Scholar] [CrossRef]
- Cao, Y.; Li, G.L.; Luo, Y.K.; Pan, Q.; Zhang, S.Y. Monitoring of sugar beet growth indicators using wide-dynamic-range vegetation index (WDRVI) derived from UAV multispectral images. Comput. Electron. Agric. 2020, 171, 105331. [Google Scholar] [CrossRef]
- Van Evert, F.K.; Fountas, S.; Jakovetic, D.; Crnojevic, V.; Travlos, I.; Kempenaar, C. Big Data for weed control and crop protection. Weed Res. 2007, 57, 218–233. [Google Scholar] [CrossRef] [Green Version]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G. The PRISMA Group: Preferred reporting items for systematic reviews and meta-analyses: The PRISMA statement. PLOS Med. 2009, 6, e1000097. [Google Scholar] [CrossRef] [Green Version]
- Ansong, M.; Pickering, C. Are weeds hitchhiking a ride on your car? A systematic review of seed dispersal on cars. PLoS ONE 2013, 8, e80275. [Google Scholar] [CrossRef] [Green Version]
- Koricheva, J.; Gurevitch, J. Uses and misuses of meta-analysis in plant ecology. J. Ecol. 2014, 102, 828–844. [Google Scholar] [CrossRef]
- Jiménez-Brenes, F.M.; López-Granados, F.; Torres-Sánchez, J.; Peña, J.M.; Ramírez, P.; Castillejo-González, I.L.; de Castro, A.I. Automatic UAV-based detection of Cynodon dactylon for site-specific vineyard management. PLoS ONE 2019, 14, e0218132. [Google Scholar] [CrossRef]
- Jurado-Expósito, M.; López-Granados, F.; Jiménez-Brenes, F.M.; Torres-Sánchez, J. Monitoring the spatial variability of knapweed (Centaurea diluta aiton) in wheat crops using geostatistics and UAV imagery: Probability maps for risk assessment in site-specific control. Agronomy 2021, 11, 880. [Google Scholar] [CrossRef]
- De Castro, A.I.; Peña, J.M.; Torres-Sánchez, J.; Jiménez-Brenes, F.M.; Valencia-Gredilla, F.; Recasens, J.; López-Granados, F. Mapping cynodon dactylon infesting cover crops with an automatic decision tree-OBIA procedure and UAV imagery for precision viticulture. Remote Sens. 2020, 12, 56. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.; Deng, J.; Lan, Y.; Yang, A.; Deng, X.; Zhang, L. A fully convolutional network for weed mapping of unmanned aerial vehicle (UAV) imagery. PLoS ONE 2018, 13, e0196302. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aharon, S.; Peleg, Z.; Argaman, E.; Ben-David, R.; Lati, R.N. Image-Based high-throughput phenotyping of cereals early vigor and weed-competitiveness Traits. Remote Sens. 2020, 12, 3877. [Google Scholar] [CrossRef]
- Fukano, Y.L.; Guo, W.; Uchida, K.; Tachiki, Y. Contemporary adaptive divergence of plant competitive traits in urban and rural populations and its implication for weed management. J. Ecol. 2020, 108, 2521–2530. [Google Scholar] [CrossRef]
- Smith, B.G.; Defeo, L.F.; Jensen, T.A. Site specific weed management mapping system using unmanned aerial vehicle (UAV). In Proceedings of the 2019 ASABE Annual International Meeting, Boston, MA, USA, 7–10 July 2019; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2019; p. 1. [Google Scholar]
- Ahmad, F.; Qiu, B.; Dong, X.; Ma, J.; Huang, X.; Ahmed, S.; Chandio, F.A. Effect of operational parameters of UAV sprayer on spray deposition pattern in target and off-target zones during outer field weed control application. Comput. Electron. Agric. 2020, 172, 105350. [Google Scholar] [CrossRef]
- Nevavuori, P.; Narra, N.; Lipping, T. Crop yield prediction with deep convolutional neural networks. Comput. Electron. Agric. 2019, 163, 104859. [Google Scholar] [CrossRef]
- Reis, B.P.; Martins, S.V.; Fernandes Filho, E.I.; Sarcinelli, T.S.; Gleriani, J.M.; Marcatti, G.E.; Leite, H.G.; Halassy, M. Management recommendation generation for areas under forest restoration process through images obtained by UAV and LiDAR. Remote Sens. 2019, 11, 1508. [Google Scholar] [CrossRef] [Green Version]
- Zou, K.; Chen, X.; Zhang, F.; Zhou, H.; Zhang, C. A Field Weed Density Evaluation Method Based on UAV Imaging and Modified U-Net. Remote Sens. 2021, 13, 310. [Google Scholar] [CrossRef]
- Yan, Y.; Deng, L.; Liu, X.; Zhu, L. Application of UAV-based multi-angle hyperspectral remote sensing in fine vegetation classification. Remote Sens. 2019, 11, 2753. [Google Scholar] [CrossRef] [Green Version]
- Veeranampalayam Sivakumar, A.N.; Li, J.; Scott, S.; Psota, E.; Jhala, A.J.; Luck, J.D.; Shi, Y. Comparison of object detection and patch-based classification deep learning models on mid-to late-season weed detection in UAV imagery. Remote Sens. 2020, 12, 2136. [Google Scholar] [CrossRef]
- Deng, J.; Zhong, Z.; Huang, H.; Lan, Y.; Han, Y.; Zhang, Y. Lightweight semantic segmentation network for real-time weed mapping using unmanned aerial vehicles. Appl. Sci. 2020, 10, 7132. [Google Scholar] [CrossRef]
- Xavier, S.S.; Coffin, A.W.; Olson, D.M.; Schmidt, J.M. Remotely estimating beneficial arthropod populations: Implications of a low-cost small unmanned aerial system. Remote Sens. 2018, 10, 1485. [Google Scholar] [CrossRef] [Green Version]
- David, L.C.G.; Ballado, A.H. Vegetation indices and textures in object-based weed detection from UAV imagery. In Proceedings of the 2016 6th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 25–27 November 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 273–278. [Google Scholar]
- Huang, H.; Deng, J.; Lan, Y.; Yang, A.; Deng, X.; Wen, S.; Zhang, H.; Zhang, Y. Accurate weed mapping and prescription map generation based on fully convolutional networks using UAV imagery. Sensors 2018, 18, 3299. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khan, S.; Tufail, M.; Khan, M.T.; Khan, Z.A.; Iqbal, J.; Alam, M. A novel semi-supervised framework for UAV based crop/weed classification. PLoS ONE 2021, 16, e0251008. [Google Scholar] [CrossRef]
- Lake, E.C.; David, A.S.; Spencer, T.M.; Wilhelm, V.L., Jr.; Barnett, T.W.; Abdel-Kader, A.A.; Cortes, A.C.; Acuna, A.; Mattison, E.D.; Minteer, C.R. First drone releases of the biological control agent Neomusotima conspurcatalis on Old World climbing fern. Biocontrol. Sci. Technol. 2021, 31, 97–106. [Google Scholar] [CrossRef]
- Huang, H.; Lan, Y.; Yang, A.; Zhang, Y.; Wen, S.; Deng, J. Deep learning versus Object-based Image Analysis (OBIA) in weed mapping of UAV imagery. Int. J. Remote Sens. 2020, 41, 3446–3479. [Google Scholar] [CrossRef]
- Rydberg, A.; Söderström, M.; Hagner, O.; Börjesson, T. Field specific overview of crops using UAV. In Proceedings of the 6th European Conference in Precision Agriculture, Skiathos, Greece, 3–6 June 2007; pp. 357–364. [Google Scholar]
- Mattivi, P.; Pappalardo, S.E.; Nikolić, N.; Mandolesi, L.; Persichetti, A.; De Marchi, M.; Masin, R. Can commercial low-cost drones and open-source GIS technologies be suitable for semi-automatic weed mapping for smart farming? A case study in NE Italy. Remote Sens. 2021, 13, 1869. [Google Scholar] [CrossRef]
- De Camargo, T.; Schirrmann, M.; Landwehr, N.; Dammer, K.H.; Pflanz, M. Optimized deep learning model as a basis for fast UAV mapping of weed species in winter wheat crops. Remote Sens. 2021, 13, 1704. [Google Scholar] [CrossRef]
- Tanut, B.; Riyamongkol, P. The development of a defect detection model from the high-resolution images of a sugarcane plantation using an unmanned aerial vehicle. Information 2020, 11, 136. [Google Scholar] [CrossRef] [Green Version]
- Islam, N.; Rashid, M.M.; Wibowo, S.; Xu, C.Y.; Morshed, A.; Wasimi, S.A.; Moore, S.; Rahman, S.M. Early weed detection using image processing and machine learning techniques in an Australian chilli farm. Agriculture 2021, 11, 387. [Google Scholar] [CrossRef]
- Rozenberg, G.; Kent, R.; Blank, L. Consumer-grade UAV utilized for detecting and analyzing late-season weed spatial distribution patterns in commercial onion fields. Precis. Agric. 2021, 22, 1–16. [Google Scholar] [CrossRef]
- Belcore, E.; Angeli, S.; Colucci, E.; Musci, M.A.; Aicardi, I. Precision agriculture workflow, from data collection to data management using FOSS tools: An application in northern Italy vineyard. ISPRS Int. J. Geo-Inf. 2021, 10, 236. [Google Scholar] [CrossRef]
- Pallottino, F.; Pane, C.; Figorilli, S.; Pentangelo, A.; Antonucci, F.; Costa, C. Greenhouse application of light-drone imaging technology for assessing weeds severity occurring on baby-leaf red lettuce beds approaching fresh-cutting. Span. J. Agric. Res. 2020, 18, 7. [Google Scholar] [CrossRef]
- Khan, S.; Tufail, M.; Khan, M.T.; Khan, Z.A.; Anwar, S. (in press) Deep learning-based identification system of weeds and crops in strawberry and pea fields for a precision agriculture sprayer. Precis. Agric. 2021, 1–17. [Google Scholar]
- Zisi, T.; Alexandridis, T.K.; Kaplanis, S.; Navrozidis, I.; Tamouridou, A.A.; Lagopodi, A.; Polychronos, V. Incorporating surface elevation information in UAV multispectral images for mapping weed patches. J. Imaging 2018, 4, 132. [Google Scholar] [CrossRef] [Green Version]
- Barrero, O.; Perdomo, S.A. RGB and multispectral UAV image fusion for Gramineae weed detection in rice fields. Precis. Agric. 2018, 19, 809–822. [Google Scholar] [CrossRef]
- Tamouridou, A.A.; Alexandridis, T.K.; Pantazi, X.E.; Lagopodi, A.L.; Kashefi, J.; Moshou, D. Evaluation of UAV imagery for mapping Silybum marianum weed patches. Int. J. Remote Sens. 2017, 38, 2246–2259. [Google Scholar] [CrossRef]
- Mateen, A.; Zhu, Q. Legion based weed extraction from UAV imagery. Pak. J. Agric. Sci. 2019, 56, 1045–1052. [Google Scholar]
- Rasmussen, J.; Nielsen, J.; Streibig, J.C.; Jensen, J.E.; Pedersen, K.S.; Olsen, S.I. Pre-harvest weed mapping of Cirsium arvense in wheat and barley with off-the-shelf UAVs. Precis. Agric. 2019, 20, 983–999. [Google Scholar] [CrossRef]
- Tamouridou, A.A.; Alexandridis, T.K.; Pantazi, X.E.; Lagopodi, A.L.; Kashefi, J.; Kasampalis, D.; Kontouris, G.; Moshou, D. Application of multilayer perceptron with automatic relevance determination on weed mapping using UAV multispectral imagery. Sensors 2017, 17, 2307. [Google Scholar] [CrossRef]
- Pantazi, X.E.; Tamouridou, A.A.; Alexandridis, T.K.; Lagopodi, A.L.; Kashefi, J.; Moshou, D. Evaluation of hierarchical self-organising maps for weed mapping using UAS multispectral imagery. Comput. Electron. Agric. 2017, 139, 224–230. [Google Scholar] [CrossRef]
- Baron, J.; Hill, D.J. Monitoring grassland invasion by spotted knapweed (Centaurea maculosa) with RPAS-acquired multispectral imagery. Remote Sens. Environ. 2020, 249, 112008. [Google Scholar] [CrossRef]
- Danilov, R.; Zelensky, R.; Ponomarev, A.; Ivanisova, M.; Gasiyan, K. Development of precision methods for remote monitoring of weeds. In Proceedings of the BIO Web of Conferences 2020, Saratov, Russia, 25–26 November 2020; EDP Sciences: Lez Ili, France, 2020; Volume 21, p. 00003. [Google Scholar]
- Agüera-Vega, F.; Agüera-Puntas, M.; Agüera-Vega, J.; Martínez-Carricondo, P.; Carvajal-Ramírez, F. Multi-sensor imagery rectification and registration for herbicide testing. Measurement 2021, 175, 109049. [Google Scholar] [CrossRef]
- Revanasiddappa, B.; Arvind, C.; Swamy, S. Real-time early detection of weed plants in pulse crop field using drone with IoT. Technology 2020, 16, 1227–1242. [Google Scholar]
- Lambert, J.P.T.; Hicks, H.L.; Childs, D.Z.; Freckleton, R.P. Evaluating the potential of unmanned aerial systems for mapping weeds at field scales: A case study with Alopecurus myosuroides. Weed Res. 2018, 58, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Kulkarni, A.A.; Nagarajan, R. Drone survey facilitated weeds assessment and impact on hydraulic efficiency of canals. ISH J. Hydraul. Eng. 2021, 27, 117–122. [Google Scholar] [CrossRef]
- Che’Ya, N.N.; Dunwoody, E.; Gupta, M. Assestment of weed classification using hyperspectral reflectance and optimal multispectral UAV imagery. Agronomy 2021, 11, 1435. [Google Scholar] [CrossRef]
- Watt, M.S.; Heaphy, M.; Dunningham, A.; Rolando, C. Use of remotely sensed data to characterise weed competition in forest plantations. Int. J. Remote Sens. 2017, 38, 2448–2463. [Google Scholar] [CrossRef]
- Mesas-Carrascosa, F.J.; Clavero Rumbao, I.; Torres-Sánchez, J.; García-Ferrer, A.; Peña, J.M.; López Granados, F. Accurate ortho-mosaicked six-band multispectral UAV images as affected by mission planning for precision agriculture proposes. Int. J. Remote Sens. 2017, 38, 2161–2176. [Google Scholar] [CrossRef]
- Che’Ya, N.N. Site-Specific Weed Management Using Remote Sensing. Ph.D. Thesis, The University of Queensland, Gatton, QLD, Australia, 7 October 2016. [Google Scholar]
- Norasma, C.Y.N.; Alahyadi, L.A.N.; Fazilah, F.F.W.; Roslan, S.N.A.; Tarmidi, Z. Identification spectral signature of weed species in rice using Spectroradiometer Handheld Sensor. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Kuala Lumpur, Malaysia, 20–21 October 2020; IOP Publishing: Bristol, UK, 2020; p. 54001209. [Google Scholar]
- Roslim, M.H.M.; Juraimi, A.S.; Che’Ya, N.N.; Sulaiman, N.; Manaf, M.N.H.A.; Ramli, Z.; Motmainna, M. Using remote sensing and an unmanned aerial system for weed management in agricultural crops: A review. Agronomy 2021, 11, 1809. [Google Scholar] [CrossRef]
- Nikolić, N.; Rizzo, D.; Marraccini, E.; Gotor, A.A.; Mattivi, P.; Saulet, P.; Persichetti, A.; Masin, R. Site and time-specific early weed control is able to reduce herbicide use in maise-a case study. Ital. J. Agron. 2021, 1780. [Google Scholar]
- Kerdegari, H.; Razaak, M.; Argyriou, V.; Remagnino, P. Smart monitoring of crops using generative adversarial networks. In Computer Analysis of Images and Patterns; Springer: Cham, Switzerland, 2019; pp. 554–563. [Google Scholar]
- Anand, T.; Sinha, S.; Mandal, M.; Chamola, V.; Yu, F.R. AgriSegNet: Deep aerial semantic segmentation framework for IoT-assisted precision agriculture. IEEE Sens. J. 2021, 21, 17581–17590. [Google Scholar] [CrossRef]
- Huang, H.; Lan, Y.; Deng, J.; Yang, A.; Deng, X.; Zhang, L.; Wen, S. A semantic labelling approach for accurate weed mapping of high resolution UAV imagery. Sensors 2018, 18, 2113. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, J.; Liao, W.; Nuyttens, D.; Lootens, P.; Vangeyte, J.; Pižurica, A.; He, Y.; Pieters, J.G. Fusion of pixel and object-based features for weed mapping using unmanned aerial vehicle imagery. Int. J. Appl. Earth Obs. Geo-Inf. 2018, 67, 43–53. [Google Scholar] [CrossRef]
- De Castro, A.I.; Torres-Sánchez, J.; Peña, J.M.; Jiménez-Brenes, F.M.; Csillik, O.; López-Granados, F. An automatic random forest-OBIA algorithm for early weed mapping between and within crop rows using UAV imagery. Remote Sens. 2018, 10, 28. [Google Scholar] [CrossRef] [Green Version]
- Beeharry, Y.; Bassoo, V. Performance of ANN and AlexNet for weed detection using UAV-based images. In Proceedings of the 3rd International Conference on Emerging Trends in Electrical, Electronic and Communications Engineering (ELECOM), Balaclava, Mauritius, 25–27 November 2020; pp. 163–167. [Google Scholar]
- Xi, Q.I.A.O.; Li, Y.Z.; Su, G.Y.; Tian, H.K.; Zhang, S.; Sun, Z.Y.; Yang, L.; Wan, F.; Qian, W.Q. MmNet: Identifying Mikania micrantha Kunth in the wild via a deep Convolutional Neural Network. J. Integr. Agric. 2020, 19, 1292–1300. [Google Scholar]
- Liang, W.C.; Yang, Y.J.; Chao, C.M. Low-cost weed identification system using drones. In Proceedings of the 2019 Seventh International Symposium on Computing and Networking Workshops (CANDARW), Nagasaki, Japan, 26–29 November 2019; pp. 260–263. [Google Scholar]
- Tang, F.; Zhang, D.; Zhao, X. Efficiently deep learning for monitoring Ipomoea cairica (L.) sweets in the wild. Math. Biosci. Eng. MBE 2021, 18, 1121–1135. [Google Scholar] [CrossRef] [PubMed]
- Fawakherji, M.; Potena, C.; Bloisi, D.D.; Imperoli, M.; Pretto, A.; Nardi, D. Uav image based crop and weed distribution estimation on embedded gpu boards. In Proceedings of the International Conference on Computer Analysis of Images and Patterns, Salerno, Italy, 3–5 September 2019; Springer: Cham, Switzerland, 2019; pp. 100–108. [Google Scholar]
- Hamylton, S.M.; Morris, R.H.; Carvalho, R.C.; Roder, N.; Barlow, P.; Mills, K.; Wang, L. Evaluating techniques for mapping island vegetation from unmanned aerial vehicle (UAV) images: Pixel classification, visual interpretation and machine learning approaches. Int. J. Appl. Earth. Obs. Geo-Inf. 2020, 89, 102085. [Google Scholar] [CrossRef]
- Chen, Y.; Hou, C.; Tang, Y.; Zhuang, J.; Lin, J.; He, Y.; Guo, Q.; Zhong, Z.; Lei, H.; Luo, S.; et al. Citrus tree segmentation from UAV images based on monocular machine vision in a natural orchard environment. Sensors 2019, 19, 5558. [Google Scholar] [CrossRef] [Green Version]
- Gašparović, M.; Zrinjski, M.; Barković, Đ.; Radočaj, D. An automatic method for weed mapping in oat fields based on UAV imagery. Comput. Electron. Agric. 2020, 173, 105385. [Google Scholar] [CrossRef]
- Kawamura, K.; Asai, H.; Yasuda, T.; Soisouvanh, P.; Phongchanmixay, S. Discriminating crops/weeds in an upland rice field from UAV images with the SLIC-RF algorithm. Plant Prod. Sci. 2021, 24, 198–215. [Google Scholar] [CrossRef]
- Yuba, N.; Kawamura, K.; Yasuda, T.; Lim, J.; Yoshitoshi, R.; Watanabe, N.; Maeda, T. Discriminating Pennisetum alopecuoides plants in a grazed pasture from unmanned aerial vehicles using object-based image analysis and random forest classifier. Grassl. Sci. 2021, 67, 73–82. [Google Scholar] [CrossRef]
- Albani, D.; Nardi, D.; Trianni, V. Field coverage and weed mapping by UAV swarms. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 4319–4325. [Google Scholar]
- Hassanein, M.; El-Sheimy, N. An efficient weed detection procedure using low-cost UAV imagery system for precision agriculture applications. In Proceedings of the The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Karlsruhe, Germany, 10–12 October 2018; pp. 181–187. [Google Scholar]
- Fehr, D.; Beksi, W.J.; Zermas, D.; Papanikolopoulos, N. Covariance based point cloud descriptors for object detection and recognition. Comput. Vis. Image Underst. 2016, 142, 80–93. [Google Scholar] [CrossRef] [Green Version]
- Pflanz, M.; Nordmeyer, H.; Schirrmann, M. Weed mapping with UAS imagery and a Bag of Visual Words based image classifier. Remote Sens. 2018, 10, 1530. [Google Scholar] [CrossRef] [Green Version]
- Hassanein, M.; Lari, Z.; El-Sheimy, N. A new vegetation segmentation approach for cropped fields based on threshold detection from hue histograms. Sensors 2018, 18, 1253. [Google Scholar] [CrossRef] [Green Version]
- Kganyago, M.; Odindi, J.; Adjorlolo, C.; Mhangara, P. Evaluating the capability of Landsat 8 OLI and SPOT 6 for discriminating invasive alien species in the African Savanna landscape. Int. J. Appl. Earth Obs. Geo-Inf. 2018, 67, 10–19. [Google Scholar] [CrossRef]
- Kaivosoja, J.; Hautsalo, J.; Heikkinen, J.; Hiltunen, L.; Ruuttunen, P.; Näsi, R.; Salonen, J. Reference measurements in developing UAV Systems for detecting pests, weeds, and diseases. Remote Sens. 2021, 13, 1238. [Google Scholar] [CrossRef]
- Hassler, S.C.; Baysal-Gurel, F. Unmanned aircraft system (UAS) technology and applications in agriculture. Agronomy 2019, 9, 618. [Google Scholar] [CrossRef] [Green Version]
- Su, W.H. Advanced Machine Learning in Point Spectroscopy, RGB-and hyperspectral-imaging for automatic discriminations of crops and weeds: A review. Smart Cities 2020, 3, 767–792. [Google Scholar] [CrossRef]
- Liu, D.; Xia, F. Assessing object-based classification: Advantages and limitations. Remote Sens. Lett. 2010, 1, 187–194. [Google Scholar] [CrossRef]
- Liakos, K.; Busato, P.; Moshou, D.; Pearson, S.; Bochtis, D. Machine Learning in Agriculture: A Review. Sensors 2018, 18, 2674. [Google Scholar] [CrossRef] [Green Version]
- Cervantes, J.; Garcia-Lamont, F.; Rodríguez-Mazahua, L.; Lopez, A. A comprehensive survey on support vector machine classification: Applications, challenges and trends. Neurocomputing 2020, 408, 189–215. [Google Scholar] [CrossRef]
- Olatunji, O.O.; Akinlabi, S.; Madushele, N.; Adedeji, P.A. Property-based biomass feedstock grading using k-nearest neighbour technique. Energy 2020, 190, 116346. [Google Scholar] [CrossRef]
- Zhang, Y.; Cao, G.; Wang, B.; Li, X. A novel ensemble method for k-nearest neighbor. Pattern Recognit. 2019, 85, 13–25. [Google Scholar] [CrossRef]
- Zhang, M.; Qu, H.; Xie, X.; Kurths, J. Supervised learning in spiking neural networks with noise-threshold. Neurocomputing 2017, 219, 333–349. [Google Scholar] [CrossRef] [Green Version]
- Le, T.M.; Shimizu, N.; Miyazaki, T.; Shinoda, K. Deep learning based multi-modal addressee recognition in visual scenes with utterances. arXiv 2018, arXiv:1809.04288. [Google Scholar]
- Ndikumana, E.; Ho Tong Minh, D.; Baghdadi, N.; Courault, D.; Hossard, L. Deep recurrent neural network for agricultural classification using multitemporal SAR Sentinel-1 for Camargue, France. Remote Sens. 2018, 10, 1217. [Google Scholar] [CrossRef] [Green Version]
- Prabakaran, G.; Vaithiyanathan, D.; Ganesan, M. FPGA based effective agriculture productivity prediction system using fuzzy support vector machine. Math. Comput. Simul. 2021, 185, 1–16. [Google Scholar] [CrossRef]
- Fortuna-Cervantes, J.M.; Ramírez-Torres, M.T.; Martínez-Carranza, J.; Murguía-Ibarra, J.S.; Mejía-Carlos, M. Object detection in aerial navigation using wavelet transform and convolutional neural networks: A first approach. Program. Comput. Softw. 2020, 46, 536–547. [Google Scholar] [CrossRef]
- Dasgupta, I.; Saha, J.; Venkatasubbu, P.; Ramasubramanian, P. AI Crop predictor and weed detector using wireless technologies: A smart application for farmers. Arab. J. Sci. Eng. 2020, 45, 11115–11127. [Google Scholar] [CrossRef]
- Talaviya, T.; Shah, D.; Patel, N.; Yagnik, H.; Shah, M. Implementation of artificial intelligence in agriculture for optimisation of irrigation and application of pesticides and herbicides. Artif. Intell. Agric. 2020, 4, 58–73. [Google Scholar] [CrossRef]
- Dos Santos Ferreira, A.; Freitas, D.M.; da Silva, G.G.; Pistori, H.; Folhes, M.T. Weed detection is soybean crops using ConvNets, Comput. Electron. Agric. 2017, 143, 314–324. [Google Scholar] [CrossRef]
- Pérez-Ortiz, M.; Gutiérrez, P.A.; Peña, J.M.; Torres-Sánchez, J.; López-Granados, F.; Hervás-Martínez, C. Machine learning paradigms for weed mapping via unmanned aerial vehicles. In Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence, Athens, Greece, 6–9 December 2016; pp. 1–8. [Google Scholar]
- Kataev, M.Y.; Dadonova, M.M. Farm fields UAV images clusterization. In Proceedings of the 2019 International Multi-Conference on Engineering, Computer and Information Sciences, Novosibirsk, Russia, 21–27 October 2019; pp. 1011–1012. [Google Scholar]
- Scherrer, B.; Sheppard, J.; Jha, P.; Shaw, J.A. Hyperspectral imaging and neural networks to classify herbicide-resistant weeds. Appl. Remote Sens. 2019, 13, 044516. [Google Scholar] [CrossRef]
- Singh, K.K. An artificial intelligence and cloud based collaborative platform for plant disease identification, tracking and forecasting for farmers. In Proceedings of the 2018 IEEE International Conference on Cloud Computing in Emerging Markets, Bangalore, India, 23–24 November 2018; pp. 49–56. [Google Scholar]
- Manfreda, S.; McCabe, M.; Miller, P.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Toth, B.; et al. On the use of unmanned aerial systems for environmental monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef] [Green Version]
- Berahim, Z.; Omar, M.H.; Zakaria, N.I.; Ismail, M.R.; Rosle, R.; Roslin, N.A.; Che’Ya, N.N. Silicon improves yield performance by enhancement in physiological responses, crop imagery, and leaf and culm sheath morphology in new rice line, PadiU Putra. Biomed. Res. Int. 2021, 2021, 6679787. [Google Scholar] [CrossRef]
- Roslim, N.A.; Che’Ya, N.N.; Rosle, R.; Ismail, M.R. Smartphone Application development for rice field management through aerial imagery and normalised difference vegetation index (NDVI) Analysis. Pertanika J. Sci. Technol. 2021, 29, 809–836. [Google Scholar]
- Yuhao, A.; Che’Ya, N.N.; Roslin, N.A.; Ismail, M.R. Rice Chlorophyll content monitoring using vegetation indices from multispectral aerial imagery. Pertanika. J. Sci. Technol 2020, 28, 779–795. [Google Scholar]
- Gibson, D.J.; Young, B.G.; Wood, A.J. Can weeds enhance profitability? Integrating ecological concepts to address crop-weed competition and yield quality. J. Ecol. 2017, 105, 900–904. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types of Satellites | Advantages | Disadvantages | References |
|---|---|---|---|
| WorldView-3 | - High spatial and spectral resolution (panchromatic of 31 cm, multispectral of 1.24 m, short wave infrared of 3.7 m, and 30 m CAVIS) - Broad spectral range i.e., has 29 spectral bands - Precision geolocation without ground control points - Huge collection capacity i.e., more than 25 million km2 per year - High classification accuracy in terms of visual interpretation and supervised classification | - High resolution of sensor limited to visible and NIR wavelengths | Warner et al. [22] |
| Sentinel-2 | - Make available data with a minimum spatial resolution of 10 m - Broad acquisition coverage - 13 bands based on visible to Short Wave Infrared (SWIR) - Short time revisits cycle i.e., less than five days globally | - Need to depend on other satellite data before the commencement of Sentinel-2. - Rate of uncertainties in data fusion and downscaling methods | Orlikova et al. [23] and Varghese et al. [24] |
| Land Satellite (Landsat) Operational Land Imager (OLI) | - High spatial variability even though the time elapsed is one month - Has a push broom configuration generating 16-bit images with at least an eight fold increase in signal-to-noise ratio than previous Landsat missions - Data saturation in sites with high biomass and penetrable canopies in low cover areas generate large uncertainties | - Higher spatial resolution sensor is limited by the temporal resolution when compared to medium-resolution data. | Abascal Zorrilla et al., [25] |
| Topics of Detecting Weed Using UAV | Review Focuses |
|---|---|
| Current trend of UAV applications for detection of weed | -Spectral differences of weed detection -Types of remote images on weed detection -Effect of spatial and spectral resolutions on weed detection -Algorithms and classification techniques for weed mapping |
| Advantages and disadvantages for each sensor | -RGB -Multispectral -Hyperspectral -Thermal |
| Advantages and disadvantages for each algorithm | -Object Based Image Analysis -k-nearest neighbour classifier -Neural networks -Support vector machine -Decision trees |
| Benefit of UAV to the agricultural industry | -Wireless sensor networks and artificial intelligence models |
| Highlighted problems for future trend of UAV applications for detection of weed | -Deep learning algorithm problems -Imaging platform challenges -Computation burdens -Different capability of different devices for UAV flight control detection of unknown weed species -Difficulty in manual labelling labour for labelling images |
| Database | Search Terms |
|---|---|
| Scopus | Titles, abstracts, keywords: “weed” AND “Unmanned Aerial Vehicle” OR “UAV” OR “drone” |
| ScienceDirect | Title, abstract, keywords: weed “Unmanned Aerial Vehicle” Title, abstract, keywords: weed UAV Title, abstract, keywords: weed drone |
| CAB Direct | Abstract: “weed” AND “Unmanned Aerial Vehicle” OR “UAV” OR “drone” |
| WoS | (Abstract = “weed” AND Abstract = (“Unmanned Aerial Vehicle” OR “AUV” OR “drone”) |
| Information | Sub-Information | Percentage of Studies (%) |
|---|---|---|
| Phenology stage of crop | Early-stage | 21.00 |
| Vegetative | 9.68 | |
| Mature | 9.68 | |
| Flowering | 8.07 | |
| Seedling | 27.42 | |
| Heading | 1.62 | |
| Late-season | 4.84 | |
| Growing season | 11.29 | |
| In-season | 6.45 | |
| Reference data | Visual from images | 84.76 |
| Visual labelling | 3.81 | |
| Digital records | 2.86 | |
| Field observations | 2.86 | |
| Visual and in situ polygons, points | 4.76 | |
| Landsat images | 0.95 | |
| Type of sensor/camera | RGB | 48.28 |
| Multispectral (broad band) | 20.69 | |
| Hyperspectral (narrow band) | 4.83 | |
| Thermal | 1.38 | |
| Weed detection procedure/classification methods | Several pixel-based classifiers | 4.20 |
| Maximum likelihood | 6.29 | |
| Spectral angle mapper (SAM) | 0.70 | |
| Vegetation index (pixel-based) | 18.18 | |
| OBIA | 14.69 | |
| Machine learning | 47.90 | |
| Fuzzy art map | 0.70 | |
| Unsupervised method | 8.39 | |
| Supervised method | 11.19 | |
| minimum distance | 2.10 | |
| Perceptron | 2.10 | |
| AlexNet | 0.70 |
| Studies | Source of Funding |
|---|---|
| Jiménez-Brenes et al. [33] Jurado-Expósito et al. [34] de Castro et al. [35] | Spanish Ministry of Science, Innovation and Universities |
| Jiménez-Brenes et al. [33] de Castro et al. [35] | European Union-European Regional Development Fund (EU-FEDER) funds |
| Huang et al. [36] | National Key Research and Development Plan: High Efficient Ground and Aerial Spraying Technology and Intelligent Equipment, China |
| Aharon et al. [37] | Chief Scientist of the Israeli Ministry of Agriculture |
| Fukano et al. [38] | Japan Society for the Promotion of Science |
| Smith et al. [39] | Department of Agriculture and Water Resources, Australia |
| Ahmad et al. [40] | Bahauddin Zakariya University in Multan, Pakistan |
| Nevavuori et al. [41] | Mtech Digital Solutions Oy, Finland |
| Reis et al. [42] | (i) National Council for Scientific and Technological Development (CNPq), Brazilian Government, and (ii) National Research, Development and Innovation Office, Hungary |
| Zou et al. [43] Yan et al. [44] | National Key Research and Development Project of China |
| Veeranampalayam Sivakumar et al. [45] | (i) Nebraska Research Initiative (NRI) Collaboration Initiative Seed, Nebraska Corn Board, and (ii) Nebraska Agricultural Experiment Station through the Hatch Act capacity funding program from the USDA National Institute of Food and Agriculture, USA |
| Deng et al. [46] | (i) Key Area Research and Development Planning Project of Guangdong Province, (ii) Guangdong Provincial Innovation Team for General Key Technologies in Modern Agricultural Industry, Science and Technology Planning Project of Guangdong Province, China, (iii) National Natural Science Foundation of Guangdong Province, China, (iv) National Key Research and Development Plan, China, and (v) 111 Project, China |
| Xavier et al. [47] | Gulf Atlantic (Long-term Agro-ecosystem Research) LTAR site of the U.S. Department of Agriculture by the University of Georgia |
| David and Ballado [48] | Department of Science and Technology-Engineering Research for Development and Technology, Philippines |
| Huang et al. [49] | (i) Educational Commission of Guangdong Province of China for Platform Construction: International Cooperation on Research and Development of Key Technology of Precision Agricultural Aviation, (ii) Science and Technology Planning Project of Guangdong Province, China, (iii) National Key Research and Development Plan, China, (iv) National Natural Science Fund, China, (v) Science and Technology Planning Project of Guangdong Province, China, (vi) Science and Technology Planning Project of Guangdong Province, China, and (vii) the Science and Technology Planning Project of Guangzhou city, China. |
| Khan et al. [50] | National Center of Robotics and Automation—Advanced Robotics and Automation Laboratory of UET Peshawar, Pakistan |
| Lake et al. [51] | (i) United States Department of Agriculture, and (ii) the United States Army Corps of Engineers and South Florida Water Management District, USA |
| Huang et al. [52] | (i) Guangdong Provincial Innovation Team for General Key Technologies in Modern Agricultural Industry, (ii) Science and Technology Planning Project of Guangdong Province, China, (iii) leading talents of Guangdong province program, (iv) Science and Technology Planning Project of Guangdong Province, (v) Key Area Research and Development Planning Project of Guangdong Province, (vi) Science and Technology Planning Project of Guangdong Province, China, (vii) National Key Research and Development Plan, China, (ix) Science and Technology Planning Project of Guangdong Province, China, Science and Technology Planning Project of Guangdong Province, China, and (x) Science and Technology Planning Project of Guangzhou city, China. |
| Crop | Research Focuses | References |
|---|---|---|
| Maize | Tested a low-cost UAV for weed mapping, evaluated open-source packages for semi-automatic weed classification, and implemented a prescription map-based sustainable management scenario. | Mattivi et al. [54] |
| Wheat | Optimized a deep residual convolutional neural network (CNN) (ResNet-18) for classifying weed and crop plants in UAV imagery. | de Camargo et al. [55] |
| Sugarcane | Developed a framework to identify the defect areas in the sugarcane farms. | Tanut and Riyamongkol [56] |
| Cultivar | Investigated the viability of integrating UAV image with satellite images to improve the classification of different pistachio cultivars and separate weeds from trees. | Malamiri et al. [26] |
| Chilli | Detected weeds in a chilli field using image processing and machine learning methods. | Islam et al. [57] |
| Onion | Investigated the late-season weed mapping by surveying dry onions with a simple off-the-shelf UAV, employing several techniques across various spatial resolutions, estimating weed coverage in the fields, and assessing the spatial pattern of weeds. | Rozenberg et al. [58] |
| Vineyard | Provide UAV and precision agriculture users with a FOSS-replicable methodology that can meet the needs of agricultural operations, as well as operational and management needs. | Belcore et al. [59] |
| Baby-leaf red lettuce beds | Provided an estimation of the exact weed quantity on baby-sized red lettuce beds using a light drone. | Pallottino et al. [60] |
| Barley | Evaluated the yield loss of spring barley due to various C. arvense infestations in big plots in farmers’ fields, and proposed a novel approach to quantifying C. arvense infestation in large plots. | Rasmussen and Nielsen [18] |
| Mixed agricultural field | Developed a deep learning system for identifying weeds and crops in croplands, such as peas and strawberries. | Khan et al. [61] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohidem, N.A.; Che’Ya, N.N.; Juraimi, A.S.; Fazlil Ilahi, W.F.; Mohd Roslim, M.H.; Sulaiman, N.; Saberioon, M.; Mohd Noor, N. How Can Unmanned Aerial Vehicles Be Used for Detecting Weeds in Agricultural Fields? Agriculture 2021, 11, 1004. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11101004
Mohidem NA, Che’Ya NN, Juraimi AS, Fazlil Ilahi WF, Mohd Roslim MH, Sulaiman N, Saberioon M, Mohd Noor N. How Can Unmanned Aerial Vehicles Be Used for Detecting Weeds in Agricultural Fields? Agriculture. 2021; 11(10):1004. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11101004
Chicago/Turabian StyleMohidem, Nur Adibah, Nik Norasma Che’Ya, Abdul Shukor Juraimi, Wan Fazilah Fazlil Ilahi, Muhammad Huzaifah Mohd Roslim, Nursyazyla Sulaiman, Mohammadmehdi Saberioon, and Nisfariza Mohd Noor. 2021. "How Can Unmanned Aerial Vehicles Be Used for Detecting Weeds in Agricultural Fields?" Agriculture 11, no. 10: 1004. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11101004