
Extraction of Arecanut Planting Distribution Based on the Feature Space Optimization of PlanetScope Imagery

 ,
,
Abstract
:1. Introduction
2. Materials and Method
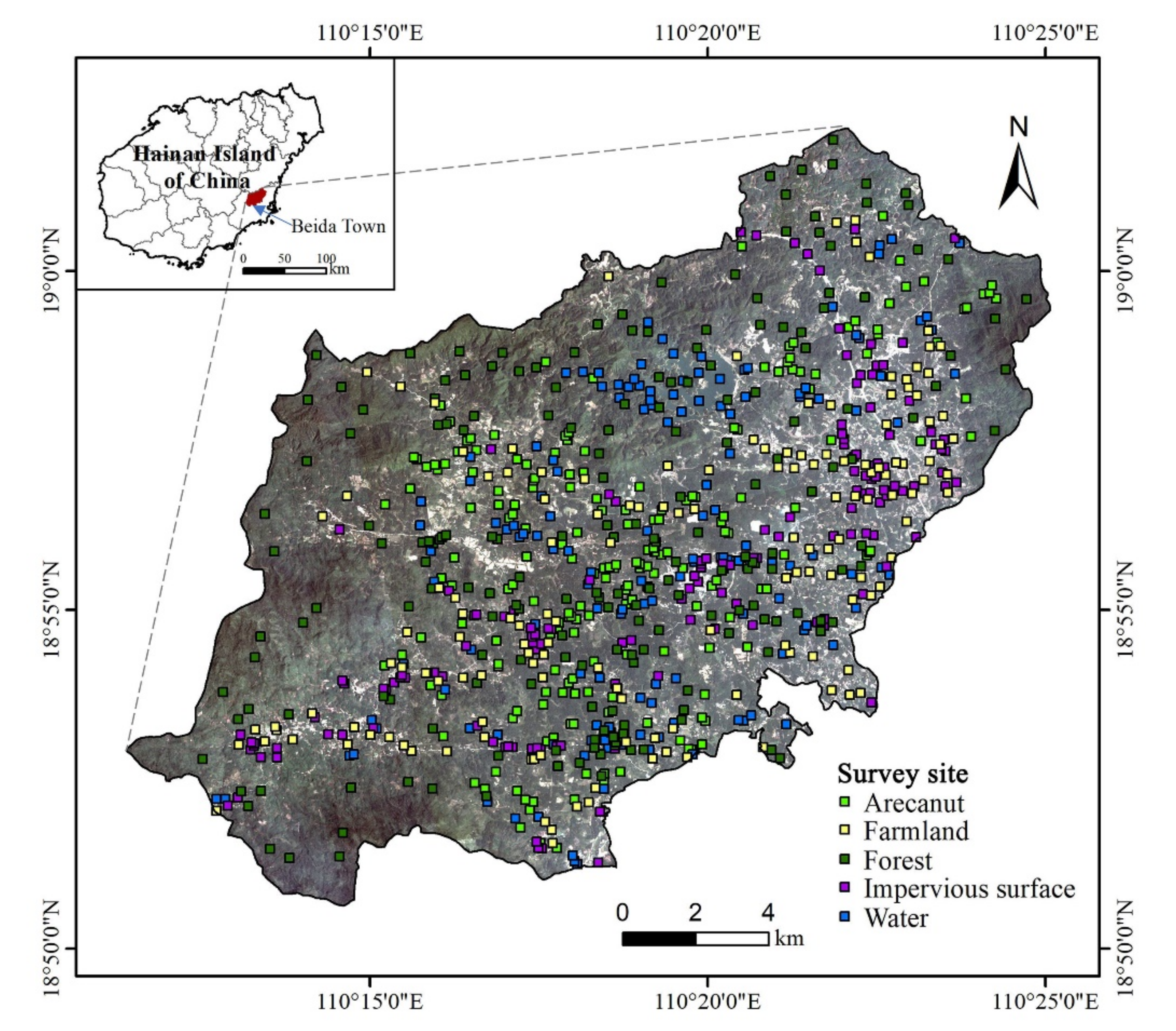
2.1. Study Area
2.2. Data Acquisition and Processing
2.2.1. PlanetScope Satellite Image Acquisition and Preprocessing
2.2.2. Ground Sample Data Collection
2.3. Feature Variable Selection
2.3.1. Primary Selection of Characteristic Variables
- Primary selection of spectral characteristic variables
- Primary selection of texture feature variables
2.3.2. Feature Variable Optimization Method
2.4. Classification Model Building Method
2.4.1. BP Neural Network Algorithm
- Dataset entry: define randomly divided training set P_train, validation set T_test, training label P class and verification label T class.
- Data normalization: the mapminmax function is used to normalize and map the data to the range of 0–1 to avoid significant differences between the input and output data.
- A neural network is established and the network parameters are set.
- The training parameters are defined and network training is performed. The number of iterations, learning rate, training error target, and maximum number of failures are set to 200, 0.001, 0.0001, and 10, respectively. The train (net, P, T) function is used for network training.
- Network simulation is performed using the sim (net, test matrix) function and the overall recognition accuracy of BPNN is obtained based on the predicted and expected values.
2.4.2. Random Forest Algorithm
2.4.3. Support Vector Machine
3. Results
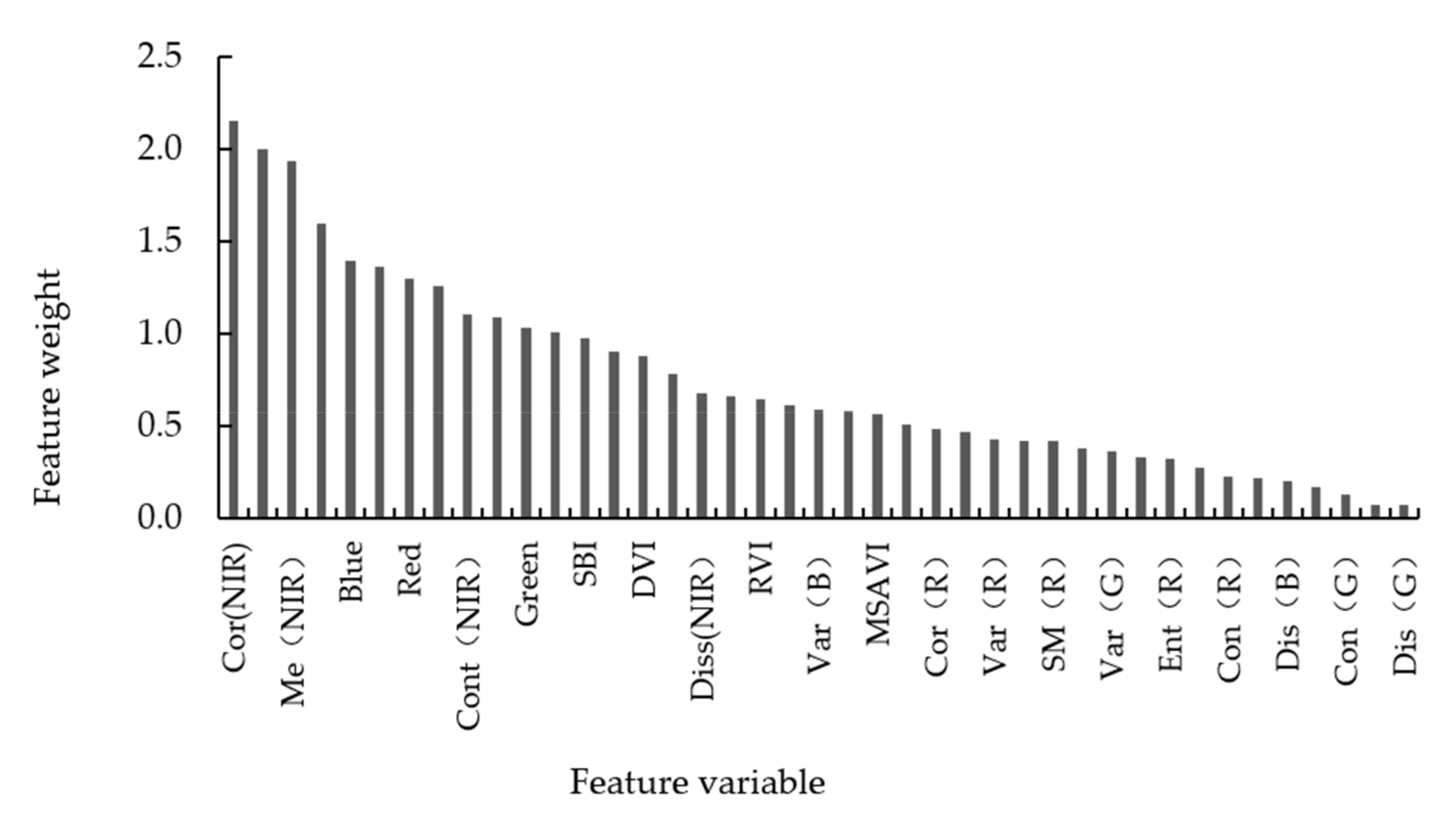
3.1. Feature Space Optimization
3.2. Extraction of Arecanut Planting Information
3.3. Regional Application
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Graham, P. Traditional medical treatments III: Betel nut (Areca catechu). Ann. ACTM Int. J. Trop. Travel Med. 2005, 6, 13–14. [Google Scholar] [CrossRef]
- Hainan Provincial Bureau of Statistics, Survey Office of National Bureau of Statistics in Hainan. Hainan Statistical Yearbook 2020; China Statistical Publishing House: Beijing, China, 2020. (In Chinese)
- Sun, H.; Gong, M. Current development status and countermeasures of arecanut planting and processing industry in Hainan. Chin. J. Trop. Agric. 2019, 39, 91–94, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Noguchi, N.; O’Brien, J.G. Remote sensing technology for precision agriculture. Environ. Control Biol. 2003, 41, 107–120. [Google Scholar] [CrossRef]
- Hayes, M.J.; Decker, W.L. Using satellite and real-time weather data to predict maize production. Int. J. Biometeorol. 1998, 42, 10–15. [Google Scholar] [CrossRef]
- Onojeghuo, A.O.; Blackburna, G.A.; Huang, J.; Kindredc, D.; Huang, W. Applications of satellite ‘hyper-sensing’ in Chinese agriculture: Challenges and opportunities. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 62–86. [Google Scholar] [CrossRef] [Green Version]
- Zheng, H.; Zhou, X.; He, J.; Yao, X.; Tian, Y. Early season detection of rice plants using rgb, nir-g-b and multispectral images from unmanned aerial vehicle (UAV). Comput. Electron. Agric. 2020, 169, 105223. [Google Scholar] [CrossRef]
- Shen, K.; Li, W.; Pei, Z.; Fei, W.; Sun, G.; Zhang, X.; Chen, X.; Ma, S. Crop area estimation from UAV transect and MSR image data using spatial sampling method. Procedia Environ. Sci. 2015, 26, 95–100. [Google Scholar] [CrossRef] [Green Version]
- Fu, Z.; Jiang, J.; Gao, Y.; Krienke, B.; Liu, X. Wheat growth monitoring and yield estimation based on multi-rotor unmanned aerial vehicle. Remote Sens. 2020, 12, 508. [Google Scholar] [CrossRef] [Green Version]
- Ládai, A.D.; Barsi, Á. Analysing automatic satellite image classification in the desert of Sudan. Period. Polytech. Civ. Eng. 2008, 52, 23–27. [Google Scholar] [CrossRef]
- Pan, Y.; Li, L.; Zhang, J.; Liang, S.; Zhu, X.; Sulla-Menashe, D. Winter wheat area estimation from modis-evi time series data using the crop proportion phenology index. Remote Sens. Environ. 2012, 119, 232–242. [Google Scholar] [CrossRef]
- Zhang, M.; Lin, H. Object-based rice mapping using time-series and phenological data. Adv. Space Res. 2019, 63, 190–202. [Google Scholar] [CrossRef]
- Liu, J.; Tian, Q.; Huang, Y.; Du, L.; Wang, L. Extraction of the corn planting area based on multi-temporal HJ-1 satellite data. In Proceedings of the 19th International Conference on Geoinformatics, Shanghai, China, 24–26 June 2011; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar] [CrossRef]
- IUSS Working Group WRB. World Reference Base for Soil Resources 2006; World Soil Resources Reports No. 103; FAO: Rome, Italy, 2006. [Google Scholar]
- Planet Team. Planet Application Program Interface: In Space for Life on Earth; Planet Labs Inc.: San Francisco, CA, USA, 2018; Available online: https://api.planet.com (accessed on 2 March 2018).
- Huang, Z.; Cao, C.; Chen, W.; Xu, M.; Dang, Y.; Singh, R.P.; Bashir, B.; Xie, B.; Lin, X. Remote sensing monitoring of vegetation dynamic changes after fire in the Greater Hinggan Mountain Area: The algorithm and application for eliminating phenological impacts. Remote Sens. 2020, 12, 156. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Pu, R.; Yuan, L.; Huang, W.; Nie, C.; Yang, G. Integrating remotely sensed and meteorological observations to forecast wheat powdery mildew at a regional scale. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2017, 7, 4328–4339. [Google Scholar] [CrossRef]
- Zeng, C.; Binding, C. The effect of mineral sediments on satellite chlorophyll-a retrievals from line-height algorithms using red and near-infrared bands. Remote Sens. 2019, 11, 2306. [Google Scholar] [CrossRef] [Green Version]
- Jordan, C.F. Derivation of leaf area index from quality of light on the forest floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
- Qi, J.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A modified soil adjusted vegetation index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Deering, D.W.; Schell, J.A. Monitoring the Vernal Advancement of Retrogradation of Natural Vegetation; NASA/GSFC, Type III, Final Report; NASA/GSFC: Greenbelt, MD, USA, 1974. Available online: https://ntrs.nasa.gov/api/citations/19740004927/downloads/19740004927.pdf (accessed on 20 December 2020).
- Huete, A.R.; Jackson, R.D. Suitability of spectral indices for evaluating vegetation characteristics on arid rangelands. Remote Sens. Environ. 1987, 23, 213–232. [Google Scholar] [CrossRef]
- Ren, C. Study on Extraction of Mango Forest with High Resolution Remote Sensing Image; Institute of Remote Sensing and Digital Earth, Chinese Academic of Sciences: Beijing, China, 2017; (In Chinese with English abstract). [Google Scholar]
- Soares, J.V.; Rennó, C.D.; Formaggio, A.R.; Yanasse, C.C.F.; CesarFrery, A. An investigation of the selection of texture features for crop discrimination using SAR imagery. Remote Sens. Environ. 1997, 59, 234–247. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textural features for image classification. Stud. Media Commun. 1973, 3, 610–621. [Google Scholar] [CrossRef] [Green Version]
- Kwok, S.W.; Carter, C. Multiple decision trees. Mach. Intell. 2013, 9, 327–335. [Google Scholar] [CrossRef]
- Pavlov, Y.L. Limit distributions of the height of a random forest. Theor. Probab. Appl. 2006, 28, 471–480. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.F.; Chica-Olmo, M.; Abarca-Hernandez, F.; Atkinson, P.M.; Jeganathan, C. Random forest classification of mediterranean land cover using multi-seasonal imagery and multi-seasonal texture. Remote Sens. Environ. 2012, 121, 93–107. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, N.; Wu, L.; Wang, Y. Wind speed forecasting based on the hybrid ensemble empirical mode decomposition and GA-BP neural network method. Renew. Energy 2016, 94, 629–636. [Google Scholar] [CrossRef]
- Mavroforakis, M.E.; Theodoridis, S. A geometric approach to support vector machine (SVM) classification. IEEE Trans. Neural Networks 2006, 17, 671–682. [Google Scholar] [CrossRef] [PubMed]
- Lesser, B.; Mücke, M.; Gansterer, W.N. Effects of reduced precision on floating-point SVM classification accuracy. Procedia Comput. Sci. 2011, 4, 508–517. [Google Scholar] [CrossRef] [Green Version]
- He, Q.; Xie, Z.; Hu, Q.; Wu, C. Neighborhood based sample and feature selection for SVM classification learning. Neurocomputing 2011, 74, 1585–1594. [Google Scholar] [CrossRef]
- Dash, M.; Liu, H. Feature selection for classification. Intell. Data Anal. 1997, 1, 131–156. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, S. Incorporation of texture information in a SVM method for classifying salt cedar in western China. Remote Sens. Lett. 2014, 5, 501–510. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Parameter | Parameter Value |
|---|---|
| Track | International Space Station OrbitSun-synchronous orbit |
| Orbital inclination | 52°, 98° |
| Spatial resolution | 3–4 m |
| Spectral band | Band1: Blue (455–515 nm) Band2: Green (500–590 nm) Band3: Red (590–670 nm) Band4: NIR (780–860 nm) |
| Track height | 400 km, 475 km |
| Sensor type | Bayer filter CCD camera |
| Width | 24.6 km × 16.4 km |
| Feature Category | Image Characteristics | Feature Description |
|---|---|---|
| Water |  | Light green, the larger the water body, the darker the color. Pit ponds are small in area, with clear boundaries and irregular shapes; rivers are in regular curved strips; lakes have large water areas, darker colors, and irregular shapes. |
| Impervious surface |  | Light purple and brown with irregular shapes, bare soil, and less vegetation coverage. |
| Forest |  | Dark green, the plots are irregularly distributed, with uniform tone and clear texture. |
| Farmland |  | Light green, with clear stripes, regular continuous distribution, and uniform texture. |
| Arecanut |  | Light green, granular canopy distributed in a large area, irregular plot shape, uniform texture, and small amount of soil exposure. |
| Spectral Characteristic | Formula 1 | Reference |
|---|---|---|
| Blue band | RB | [16] |
| Green band | RG | [16] |
| Red band | RR | [17] |
| Near-infrared band | RNIR | [18] |
| Difference Vegetation Index (DVI) | [19] | |
| Modified Soil Adjusted Vegetation Index (MSAVI) | [20] | |
| Normalized Difference Vegetation Index (NDVI) | [21] | |
| Ratio Vegetation Index (RVI) | [22] | |
| Soil Brightness Index (SBI) | [23] |
| Texture Feature | Formula 1 | Description |
|---|---|---|
| Mean | Reflects the regular degree of texture. | |
| Variance | Reflects the deviation between the pixel and mean values; the larger the grayscale change, the larger the value. | |
| Homogeneity | Reflects the local gray uniformity of the image; the more uniform the local, the larger the value. | |
| Contrast | Reflects the sharpness of the image and the depth of the texture. | |
| Dissimilarity | Similar to contrast, with greater linearity; the higher the local contrast, the higher the dissimilarity. | |
| Entropy | Reflects the texture complexity; the larger the value, the more complex the texture. | |
| Second Moment | Reflects the uniformity of the image distribution and texture thickness. | |
| Correlation | Reflects the image local relevance. |
| Model | Omission Error/% | Commission Error/% | User’s Accuracy/% | Producer’s Accuracy/% | Overall Accuracy/% | Kappa Coefficient |
|---|---|---|---|---|---|---|
| SVM-1 | 24.24 | 27.54 | 72.46 | 75.76 | 70.92 | 0.630 |
| BPNN-1 | 15.15 | 18.84 | 81.16 | 84.85 | 75.90 | 0.698 |
| RF-1 | 13.64 | 8.06 | 91.94 | 86.36 | 80.85 | 0.760 |
| SVM-2 | 19.70 | 17.19 | 82.81 | 83.30 | 74.82 | 0.680 |
| BPNN-2 | 15.15 | 12.50 | 87.50 | 84.85 | 83.67 | 0.795 |
| RF-2 | 6.06 | 7.46 | 92.54 | 93.94 | 88.30 | 0.853 |
| Model. | Land Use Type | Water | Impervious Surface | Forest | Farmland | Arecanut | Total |
|---|---|---|---|---|---|---|---|
| SVM-2 | Water | 49 | 0 | 0 | 0 | 0 | 49 |
| Impervious surface | 0 | 50 | 0 | 0 | 0 | 50 | |
| Forest | 1 | 0 | 59 | 46 | 13 | 119 | |
| Farmland | 0 | 0 | 0 | 0 | 0 | 0 | |
| Arecanut | 0 | 0 | 7 | 4 | 53 | 64 | |
| Total | 50 | 50 | 66 | 50 | 66 | 282 | |
| BPNN-2 | Water | 49 | 0 | 0 | 0 | 0 | 49 |
| Impervious surface | 0 | 50 | 0 | 0 | 0 | 50 | |
| Forest | 0 | 0 | 50 | 15 | 4 | 69 | |
| Farmland | 1 | 0 | 12 | 31 | 6 | 50 | |
| Arecanut | 0 | 0 | 4 | 4 | 56 | 64 | |
| Total | 50 | 50 | 66 | 50 | 66 | 282 | |
| RF-2 | Water | 49 | 0 | 0 | 0 | 0 | 49 |
| Impervious surface | 0 | 50 | 0 | 0 | 0 | 50 | |
| Forest | 0 | 0 | 57 | 17 | 1 | 75 | |
| Farmland | 1 | 0 | 6 | 31 | 3 | 41 | |
| Arecanut | 0 | 0 | 3 | 2 | 62 | 67 | |
| Total | 50 | 50 | 66 | 50 | 66 | 282 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, Y.; Guo, J.; Ye, H.; Zhao, J.; Huang, W.; Cui, B. Extraction of Arecanut Planting Distribution Based on the Feature Space Optimization of PlanetScope Imagery. Agriculture 2021, 11, 371. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11040371
Jin Y, Guo J, Ye H, Zhao J, Huang W, Cui B. Extraction of Arecanut Planting Distribution Based on the Feature Space Optimization of PlanetScope Imagery. Agriculture. 2021; 11(4):371. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11040371
Chicago/Turabian StyleJin, Yu, Jiawei Guo, Huichun Ye, Jinling Zhao, Wenjiang Huang, and Bei Cui. 2021. "Extraction of Arecanut Planting Distribution Based on the Feature Space Optimization of PlanetScope Imagery" Agriculture 11, no. 4: 371. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11040371