
Research Progress and Development of Mechanized Potato Planters: A Review


1
College of Mechanical and Electronic Engineering, Northwest A&F University, Yangling 712100, China
2
College of Engineering, China Agricultural University, Beijing 100083, China
3
College of Enology, Northwest A&F University, Yangling 712100, China
*
Author to whom correspondence should be addressed.
Agriculture 2021, 11(6), 521; https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11060521
Submission received: 20 April 2021
/
Revised: 28 May 2021
/
Accepted: 29 May 2021
/
Published: 3 June 2021
(This article belongs to the Special Issue Agricultural Structures and Mechanization)
Abstract
:Potato is one of the most important crops in the world to ensure food security for the world’s fast-growing population. Mechanized planting is crucial for improving production and per unit area yield of potato. To meet the agronomic requirements of potato planting, various types of potato planters have been developed according to the existing differences in geographical environment, cropping system, farm scale, and economic status among different countries and regions. This paper summarizes the research progress and application status of potato planters all over the world. Specifically, the seed-metering devices of potato planters are classified firstly. Then, potato planters are classified into three types: potato planters for manual/animal, two-wheel tractor, and four-wheel/crawler tractor traction. Furthermore, the characteristics of some typical commercial potato planters are discussed. Finally, some suggestions are proposed in order to promote the development of potato planters.
1. Introduction
Potato (Solanum tuberosum L.), the world’s third most important crop and first most important non-cereal food crop, has been regarded as a key source to ensure food security for the world’s fast-growing population [1,2,3]. According to data from FAO, the potato industry is undergoing major changes. Before the early 1990s, potatoes were mostly grown and consumed in Europe, North America, and the former Soviet Union. Since then, there has been a dramatic increase in potato demand and production in Asia, Africa, and the Americas, where the output rose from less than 30 million tons in the early 1960s to more than 261 million tons in 2019. Furthermore, FAO data show that since 2005, production in developing countries has exceeded that from developed countries, and it is estimated that potato has provide nutrition for over a billion people [4]. Nowadays, potato has been the vital economic crop in many countries. For example, potato contributes 2.9% to agricultural gross domestic product (GDP) in India. In Egypt, the potato is the second most important strategic crop, accounting for about 25% of total Egyptian agricultural exports, and has been ranked as one of the most important vegetable crops [5].
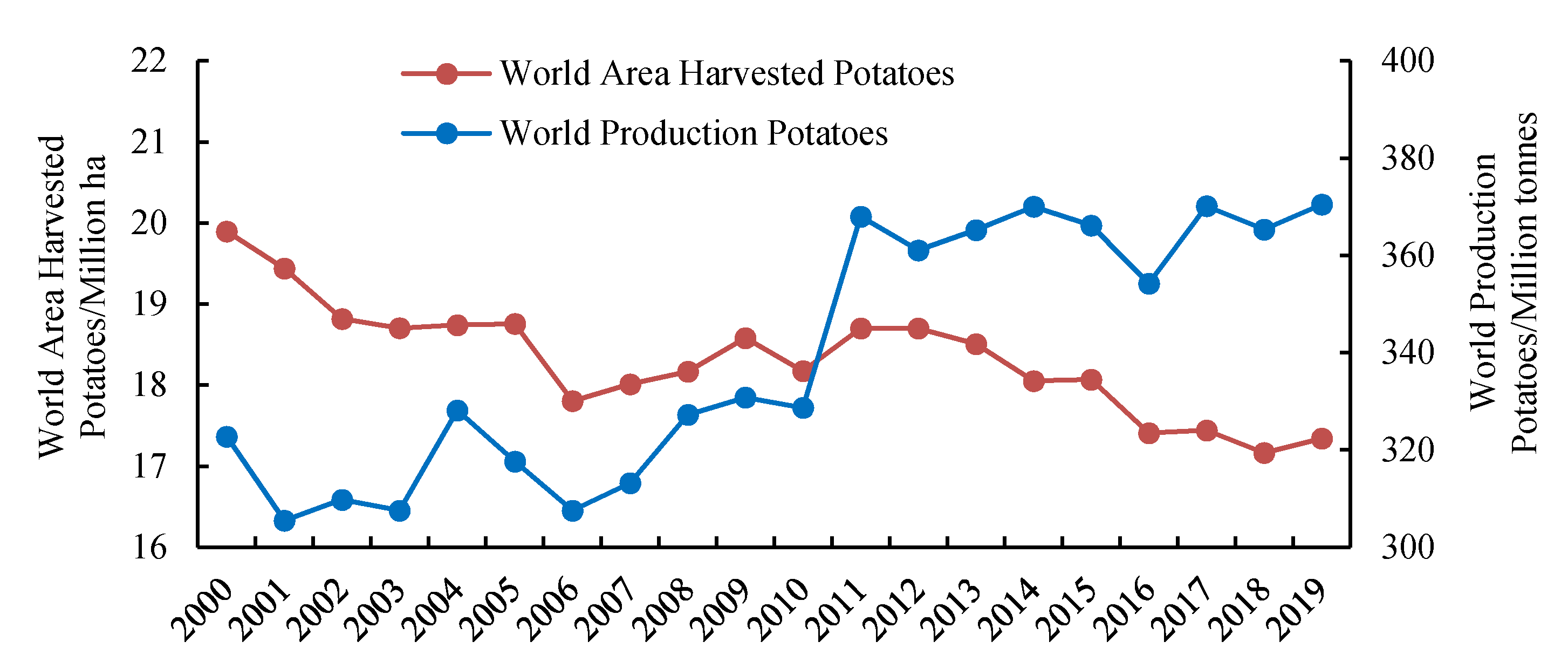
At present, global potato production and food security are being greatly affected by many factors, such as arable land, climate, population, and resources [6,7,8]. Therefore, it is important to achieve a high quality, high yield, improved efficiency, and sustainability of potato production and to accelerate potato industrialization to ensure long-term food security [9,10,11]. As can be seen in Figure 1, the world has witnessed a continuous increase of potato production since 2000, and potato production showed a 14.7% increase from 2000 to 2009, from 322.8 million tons (Mt) to 370.4 Mt. However, the overall potato harvested area showed a 38.2% decrease from 2000 to 2019, from 19.9 million ha (Mha) to 17.3 Mha. Therefore, it can be confirmed that the per unit area yield of potato has been increasing steadily [12].
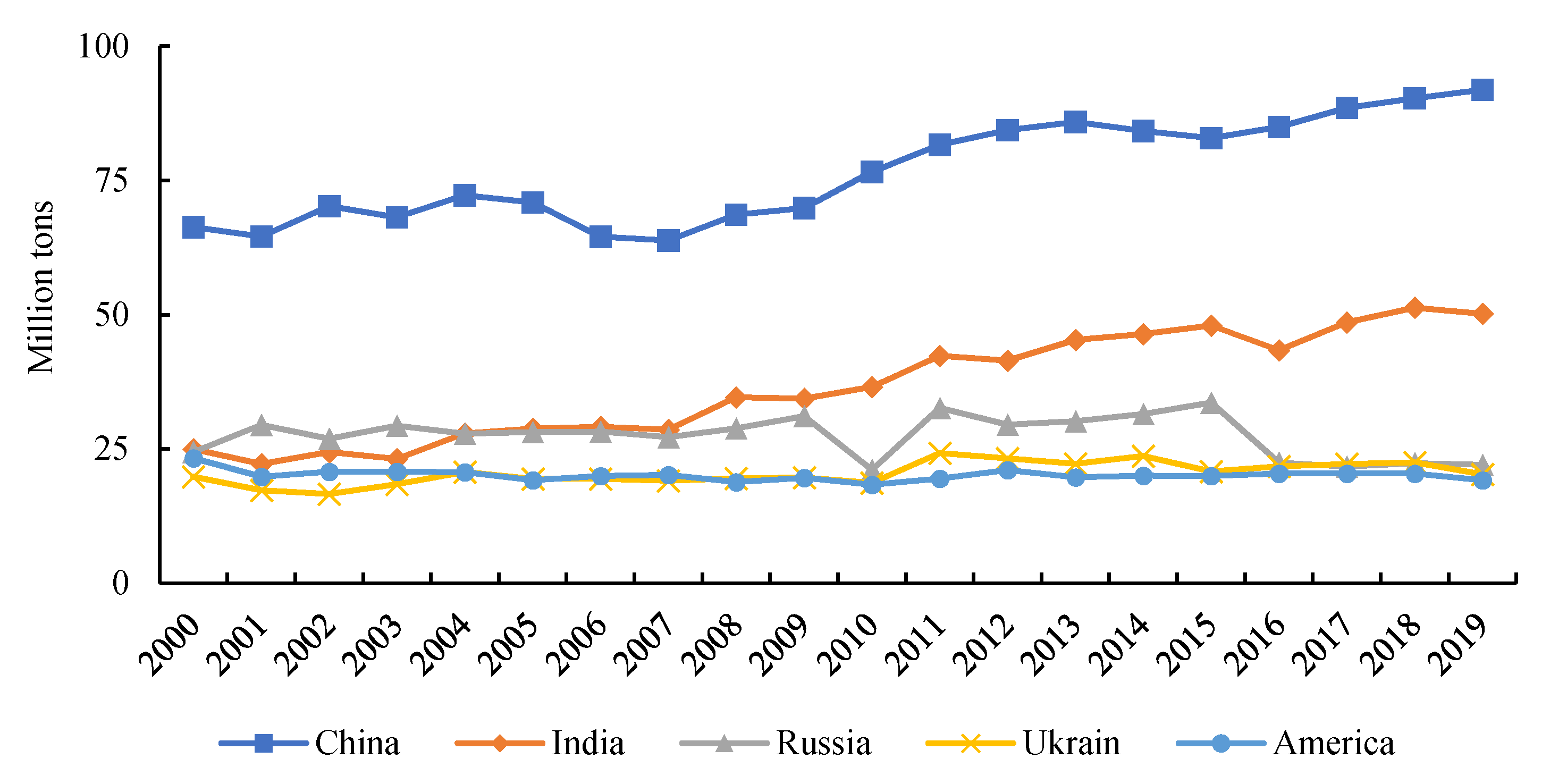
From 2000 to 2019, the top five highest average potato production countries were China, India, the Russian Federation, Ukraine, and the United States of America. Moreover, as can be seen from Figure 2, during this 20-year period, production in China and India has increased dramatically, while potato production has kept a dynamic balance in the Russian Federation, Ukraine, and the USA. In the 2019 rankings of the top ten potato producing countries, China and India occupy the first and second places, while the Russian Federation occupies the third.
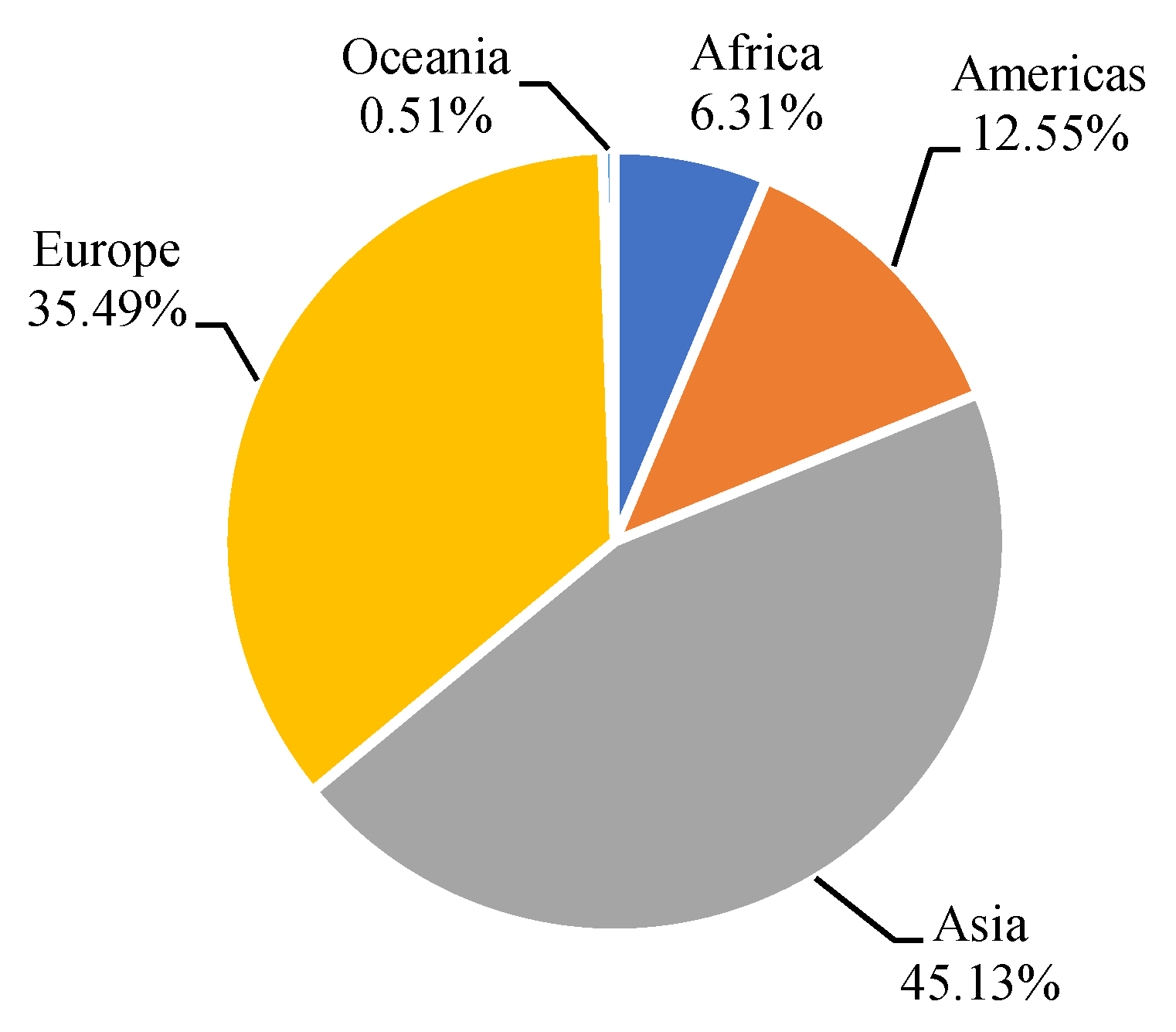
As can be seen from Figure 3, during 2000 to 2019, Asia has been the major producer of potatoes, with 45.13% of the global potato production during that period, and Europe is ranked a close second with a portion of 35.49%. The Americas and Africa rank third and fourth with 12.55% and 6.31%, respectively, while Oceania only has 0.51% of the global production share of potatoes, which ranks as last. Across the world, more than 17 Mha of farmland are devoted to potato production, with a yield of about 21.36 t/ha in 2019. According to Table 1, by analyzing the data from 2000 to 2019, it can be confirmed that the growing area has been decreasing while potato quantity has increased in the regions of the Americas, Europe, and Oceania, and the yield has increased simultaneously. In addition, potato quantity has increased along with the growing area in the regions of Africa and Asia, which also saw yield growth at the same time. Consequently, the world’s potato per unit area yield achieves steady growth without considering the decline in the growing area of potato, which is in good concordance with the above analysis and results.
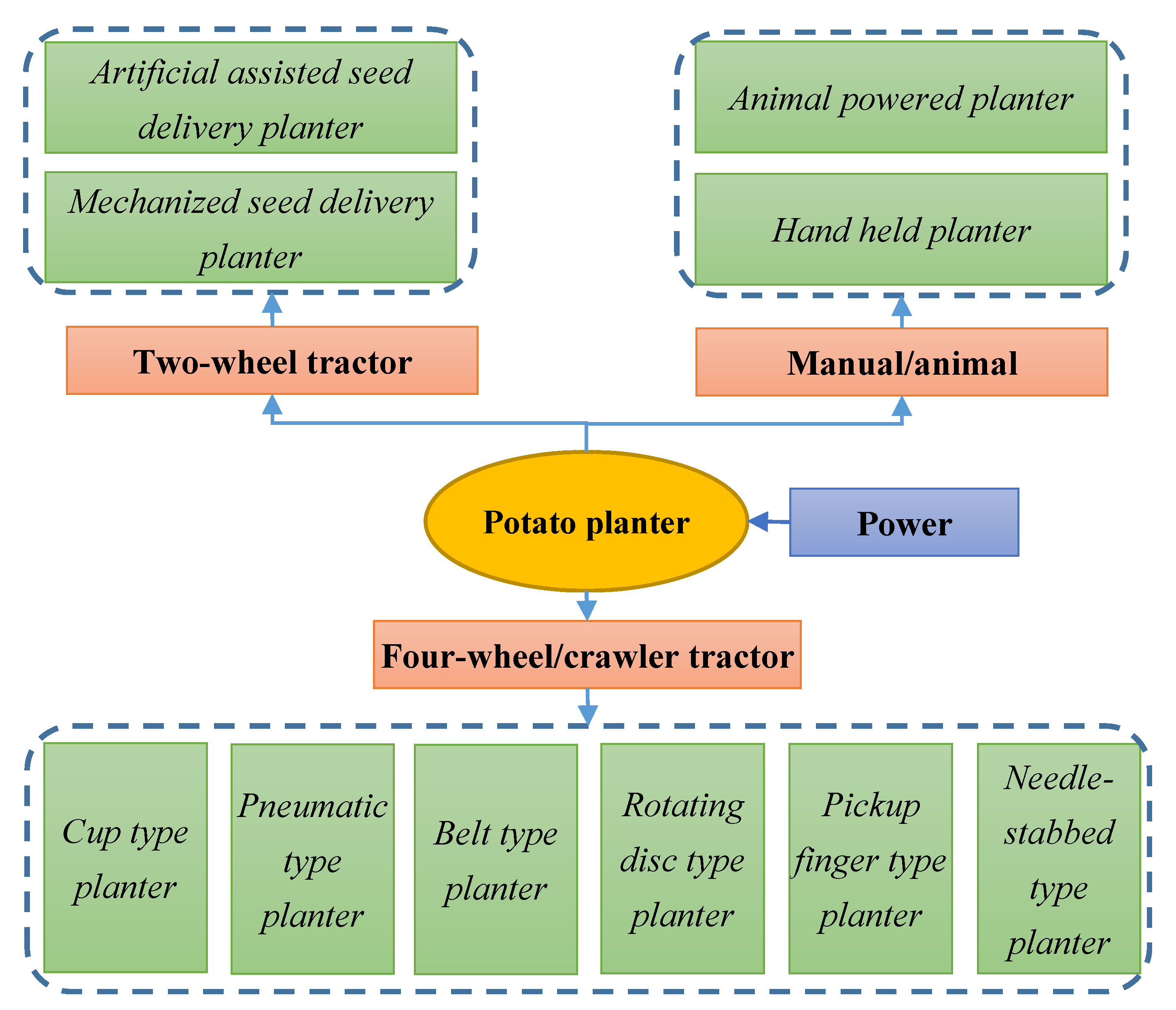
There are several factors that affect the global potato production, among which mechanization is crucial for improving production and per unit area yield of potato. Planting, cultivating, and harvesting are the three main components of potato production. Among potato production components, planting is one of the most important steps, which is complex, labor-intensive, and difficult to mechanize, influencing the production quality and final output of potato greatly [13,14]. The entire planting operation can be divided into tillage, ditching, spraying, seeding, fertilizing, ridging, etc. Depending on the method employed for planting, these functions are performed by different machines, or even by one machine in a single pass over the field. Reducing labor intensity, improving working efficiency, and ensuring seeding quality are advantages of mechanized potato planting [15,16]. Therefore, potato planters are especially significant for the development of the potato industry. This paper aims to analyze the research progress and application status of potato planters in the world. Firstly, the seed metering device of potato planters was clarified. Then, potato planters were classified into three types according to the drive mode: potato planters for manual/animal, two-wheel tractor, and four-wheel/crawler tractor traction (Figure 4).
2. Review of Seed Metering Devices of Potato Planters
The seed metering device is the key part of a potato planter [17,18]. According to the planting method, this paper summarizes the structural characteristics of the potato seed metering devices and classifies them as follows: cup, pneumatic, belt, rotating disc, pickup finger, needle-stabbed, etc.
2.1. Cup-Type Seed Metering Device
The cup-type seed metering device (Figure 5) is the most widely used seeding device for potato planters around the world [13,16,19]. The metering process of the cup-type potato metering device can be divided into five phases: seed filling, seed transporting, seed cleaning, seed translocation, and seed dropping. Under gravity, the potato seeds flow to the bottom of the seed box, where seed filling occurs. The driving pulley, which is powered by the potato planter’s land wheel, drives the seed metering device. The seed metering belt/chain close to the seed filling area moves upward, and each metering cup installed on the seed metering belt/chain scoops 1–2 potato seeds in turn. When the cups move to the seed cleaning area, the surplus potato seeds that lay in the cups will be cleaned up by the seed cleaning device and fall back into the seed box. Once the cup reaches the highest point and crosses the driving pulley, the potato seeds fall on the back of the next cup. The two spoons adjacent to each other have a separate space, which guarantees there is only one potato seed on the back of each cup. Potato seeds are carried by the cups to the seed release point, then drop into the bottom of the seed ditch, and finally the whole seeding process is completed [20,21].
According to the transporting mode, the cup-type seed metering device can be divided into belt-cup and chain-cup types. Compared with the chain-cup-type metering device, the belt-cup type has a simple structure, which is not expensive and its working speed can be adjusted easily, but it is more likely to slip during the operation process, leading to poor reliability of transportation and making it difficult to guarantee seeding space uniformity. For the chain-cup-type metering device, the transportation quality is good, but it has a high damage rate of potato seeds, leading to yield loss [16,19]. Several studies were conducted on improving the working performance of the cup-type seed metering device. For example, Buitenwerf et al. [13] built a mathematical model to predict the planting accuracy and planting capacity of cup-belt seed metering devices. Lü et al. [22] designed a belt-cup-type seed metering device, which was suitable for seeding whole potato seeds or sliced potato seeds. In order to solve the problem of sowing loss in the chain-cup-type seed metering device, Sun et al. [23] and Niu et al. [24] designed a sowing loss monitoring and compensation system, respectively. Laboratory tests showed good performance of the system. To improve the efficiency and seeding precision of potatoes, Zhang et al. [25] designed a novel vacuum and spoon belt combination metering device.
2.2. Pneumatic-Type Seed Metering Device
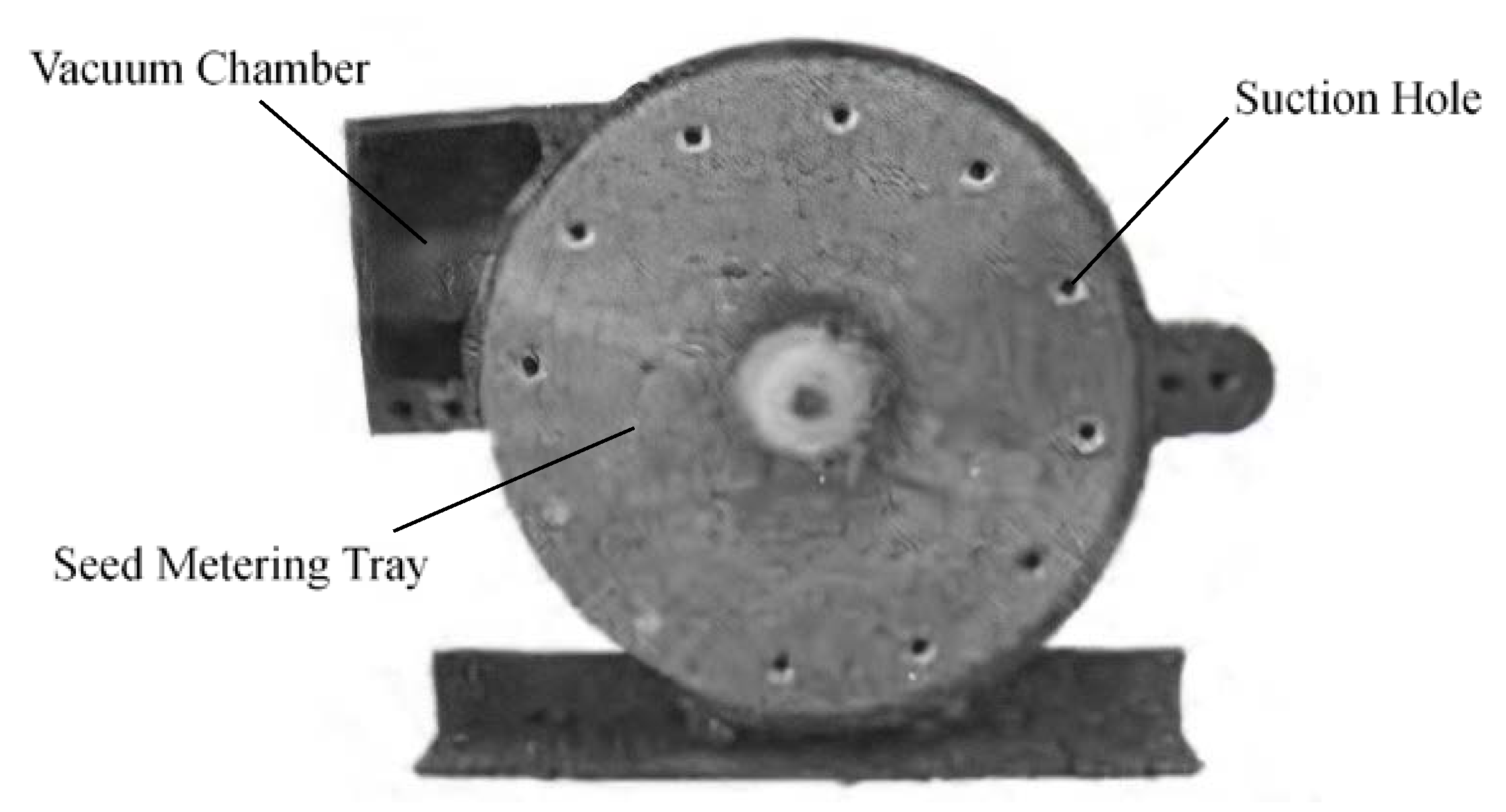
The pneumatic-type seed metering device (Figure 6) operates with high negative pressure to attract and hold potato seeds when removing them from the seed box, and the redundant seeds will be cleared away by a related seed cleaning device and returned to the seed box again for later use. The remaining seeds are released in a suitable area (with no negative pressure) and drop into the seedbed. There are several advantages of pneumatic-type seed metering devices, such as low seed damage rate, high metering quality, high adaptation to seeds of different sizes and shapes, and high operation speed [26,27]. Due to these advantages, a series of studies were conducted on the design and optimization of the pneumatic-type seed metering devices.
McLeod et al. [6] designed a prototype pneumatic seeding device to select and deliver a single true potato seed to a specific location. Lü et al. [15,20] proposed a novel design scheme for potato air-suction metering. Field test results confirmed that the working performance met the requirements of precision seeding. Lai et al. [28,29] designed a vibrating feeding pneumatic disc metering device for mini-tuber through theoretical calculation based on the physical properties of mini-tuber. Mao et al. (2013b) [30] designed and optimized a precision pneumatic metering device with declined disc for virus-free mini-potato seed. This type of device not only improved the working efficiency but also reduced the damage on seed potato.
2.3. Belt-Type Seed Metering Device
The belt-type seed metering device uses a belt to capture, deliver, and sow potato seeds. This kind of seed metering device can be divided into two forms: moving-belt type and cup-belt type.
2.3.1. Moving-Belt-Type Seed Metering Device
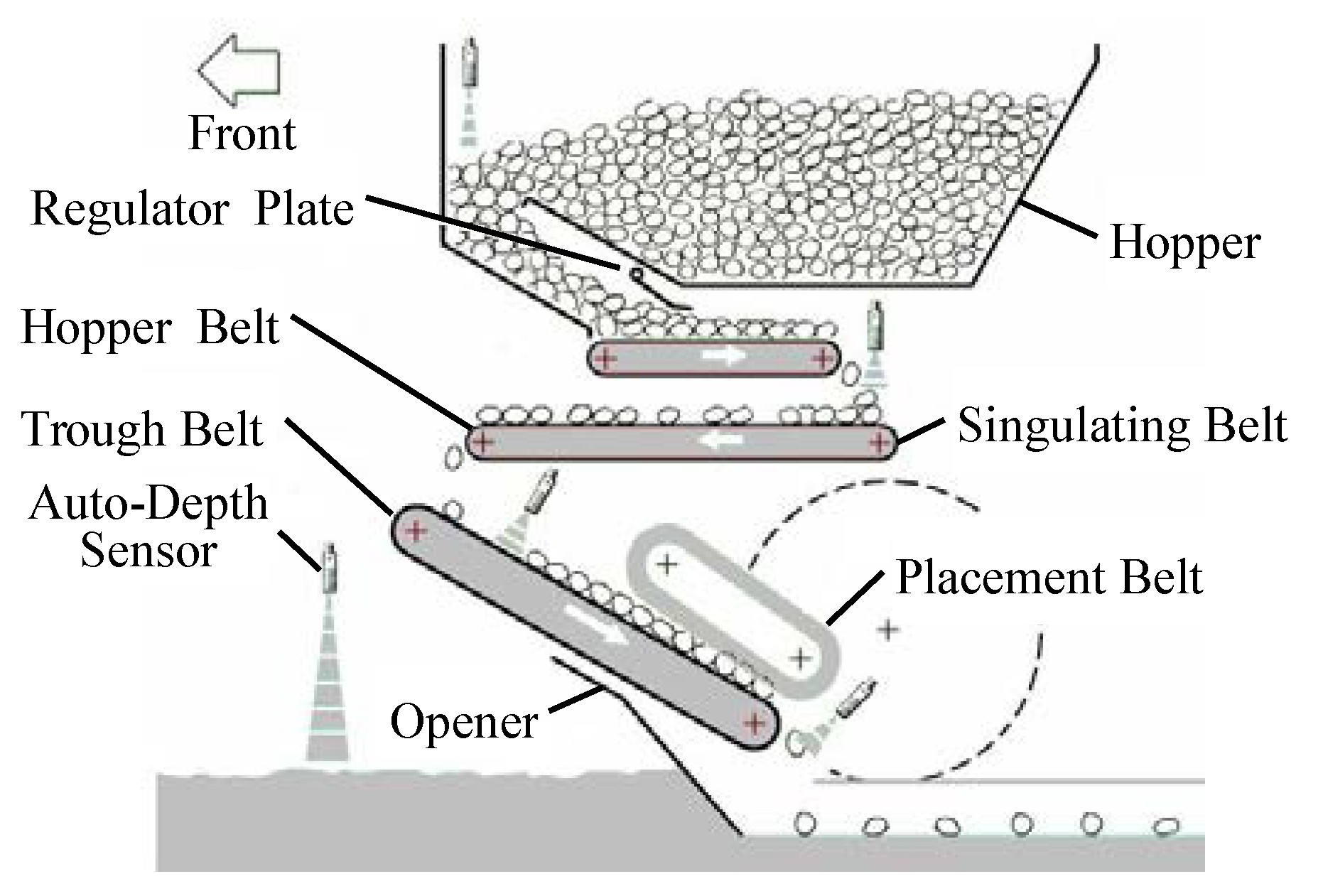
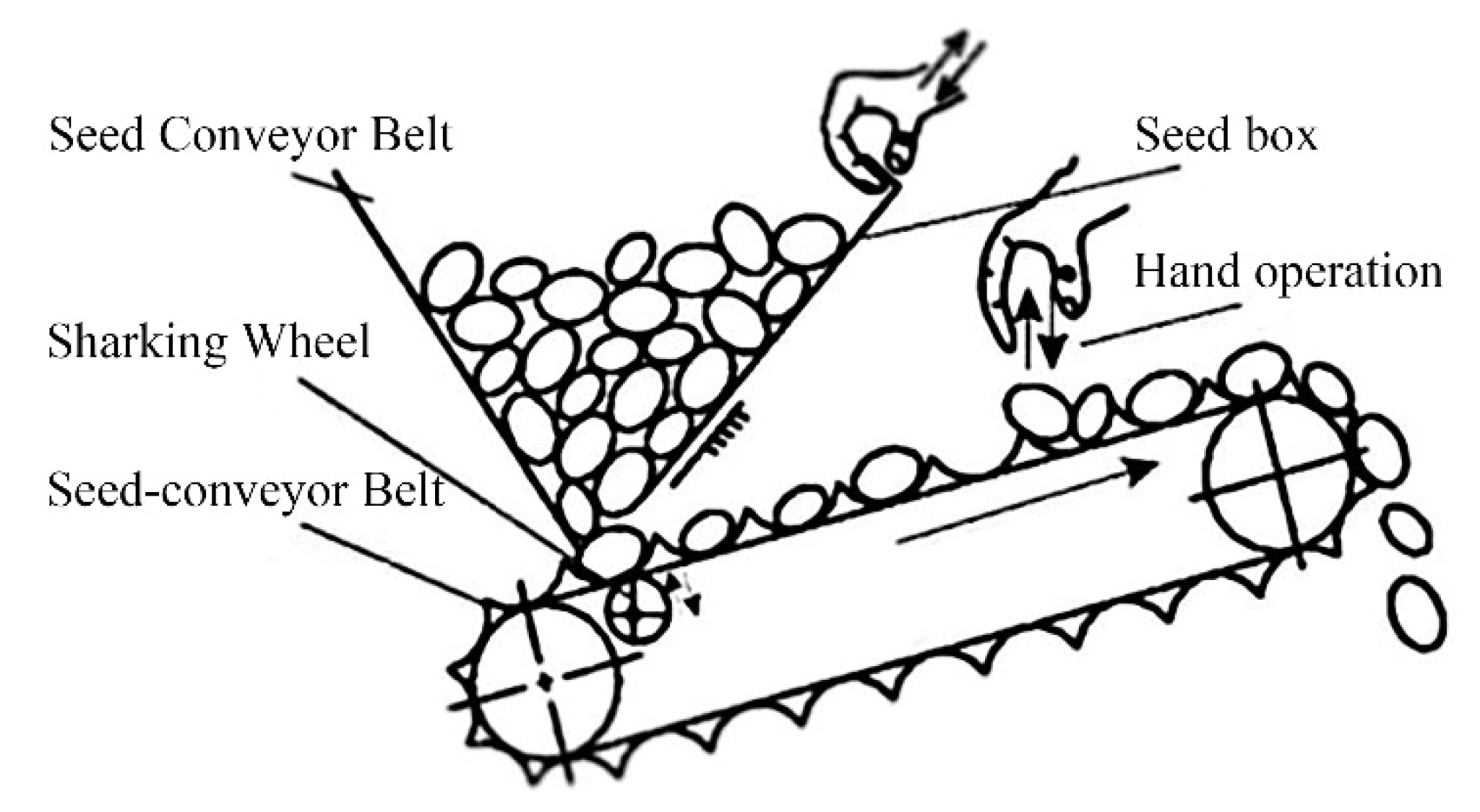
The main components of moving-belt-type seed metering devices are the seed box, seed transportation device, side belt, mid-belt, etc. Potatoes are dropped from the seed box to the mid-belt through the seed transportation device. Both sides of the mid-belt are arranged with a side belt, and the direction of the linear speed between the mid-belt and side belt is converse. Potatoes on the mid-belt are sorted into a single row, then transported to the seed-throwing area, and finally drop into the seedbed. The redundant potatoes are removed from mid-belt to side-belts. The side belts transport the potatoes to the end sides and prepare them for moving to the mid-belt again for single-row sorting and seeding. This kind of seed metering device has a simple structure, small size, low rate of seed injury, and stronger adaptability to various shapes of potato seeds [32].
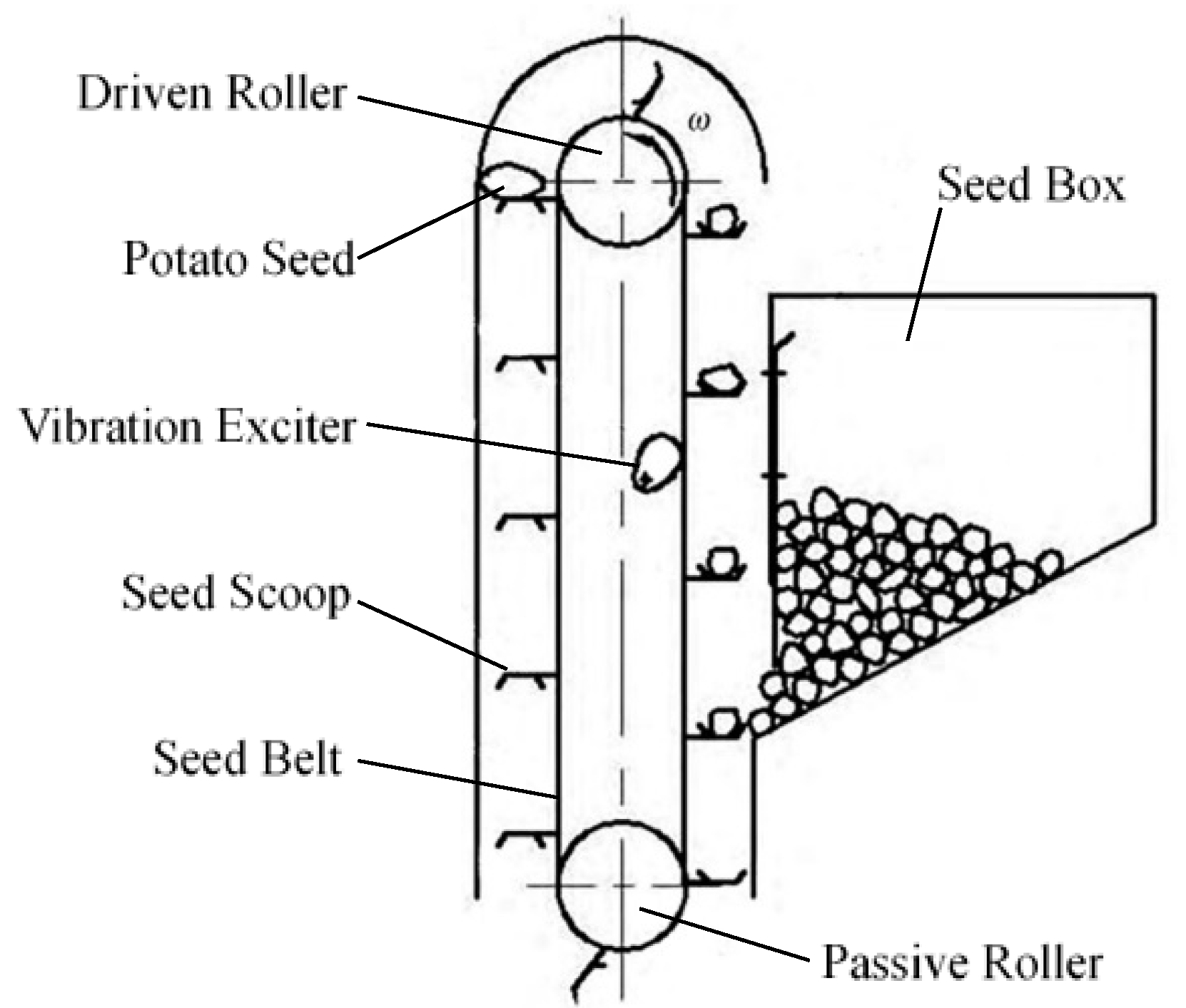
There are several studies about moving-belt-type seed metering devices. For example, He. [32] designed a belt type of potato seed sowing device; theory, analysis, and experiment were conducted and confirmed that the design satisfied the requirements of precision seeding. Liu et al. [33] developed a mechanical planting technology and designed a related seeding device based on the principle of forced vibration, which could promote the mechanization level of potato micro-seed planting. Nowadays, some commercial planters have applied this kind of seed metering device (Figure 7), such as Standen Engineering Ltd., Grimme UK Ltd., Trinkel Ltd., etc.
2.3.2. Cup-Belt-Type Seed Metering Device
The seed conveyor belt (Figure 8) is designed with grooves, the grooves are arranged in equal uniform spacing, which guarantees seeding space uniformity. Potatoes are filled into the grooves, relying on the flowability, by hand. The grooves move with the movement of the seed conveyor, and potato seeds drop from the grooves into the seedbed at the seed-dropping mouth. This type of seed metering device has a simple structure and is easy to operate. Isher Engineering Works Ltd. (Meerut, India) and Vasilios Kelidis & Co (Kato Nevrokopi, Greece). use this kind of seed metering device to plant whole or sliced potato seeds. However, this type of seed metering device needs to employ humans to put the potato seeds into the grooves, which leads to high labor strength and cost.
2.4. Rotating Disc Seed Metering Device
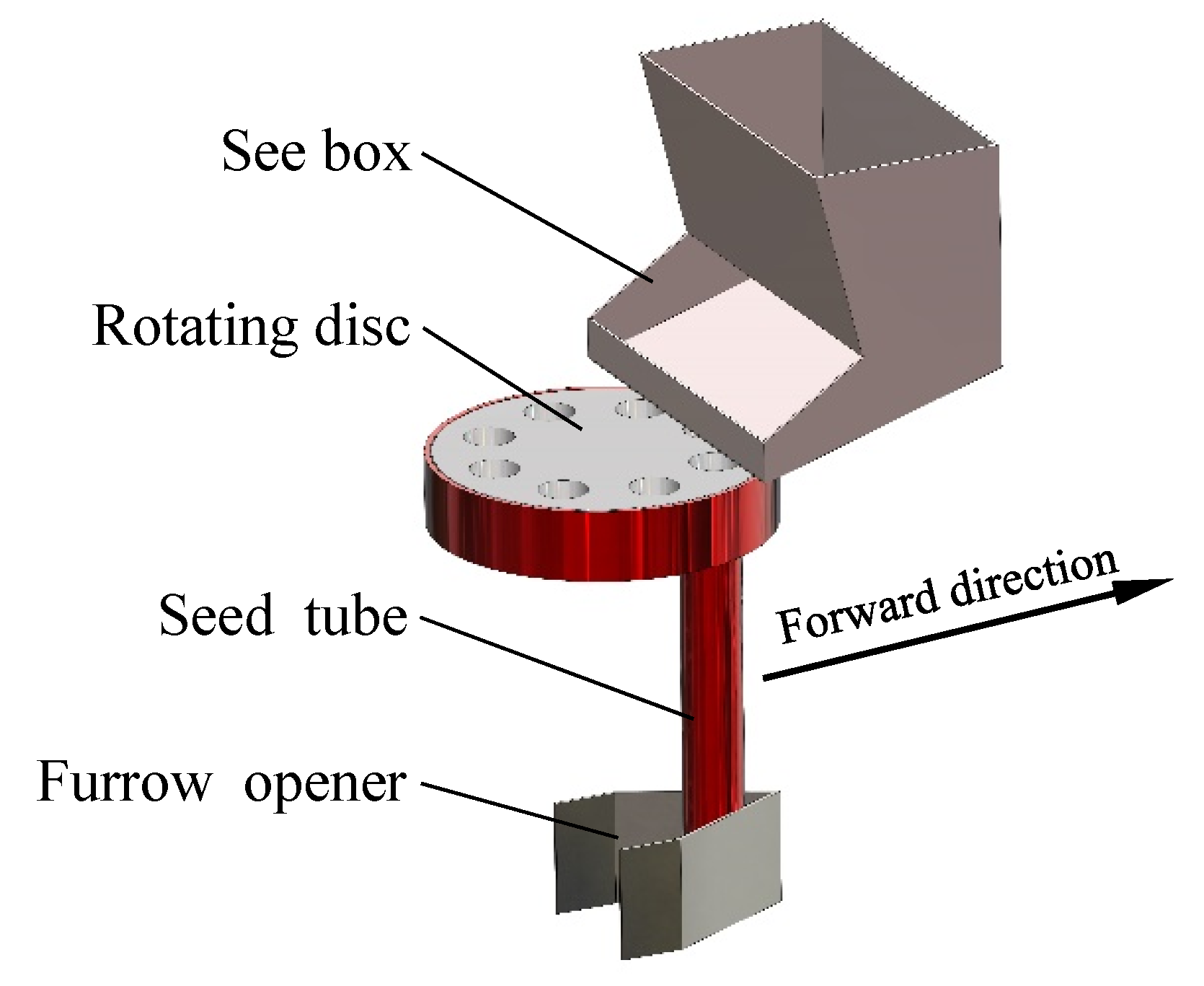
For the rotating disc seed metering device (Figure 9), the main components are a rotating disc, transaction system, seed box, cover plate, and seed tube. Certain numbers of round holes or grids with the same diameter/dimensions are arranged uniformly around the center of the rotating disc. The rotating disc is nested within the cover plate, and the cover plate is fixed upon the frame. Moreover, the seed tube is set underneath the rotating disc and penetrates through the cover plate, and a seed dropping mouth is generated at the point of the joint parts of the seed tube and cover plate. Seeds are filled into the round holes/grids successively by hand from the seed box. When the round holes/grids turn to the position of the seed dropping mouth, potato seeds located in the round holes/grids will fall into the seed tube under gravity. Finally, potato seeds drop into the seedbed through the seed tube. The characteristics of this device are as follows: (1) high adaptability (it is suitable for irregularly shaped seeds); (2) no seed damage and blocking; (3) low rate of miss/multiple seeding index; (4) high intensity of labor force, resulting in high operation costs.
There were several applications of patents related to the rotating disc seed metering device in the 1990s, such as the patents of US S736981 A [34], US 744984 A [35], US 997674 A [36], US 2642909 A [37], etc. As this type of seed metering device is suitable for seeding irregularly shaped seeds, Lü et al. [38] designed a rotating disc seed metering device which could plant the sliced and whole potatoes with the same seed metering device. Nowadays, with its applicability in planting whole or cut potato seeds, the rotating disc seed metering device has been widely used by many international agricultural machinery enterprises, such as F.lli Spedo, Ferrari Costruzioni Meccaniche, US Small Farm Equipment, Garmach, and Ganesh Raj Industries.
2.5. Pickup Finger Seed Metering Device
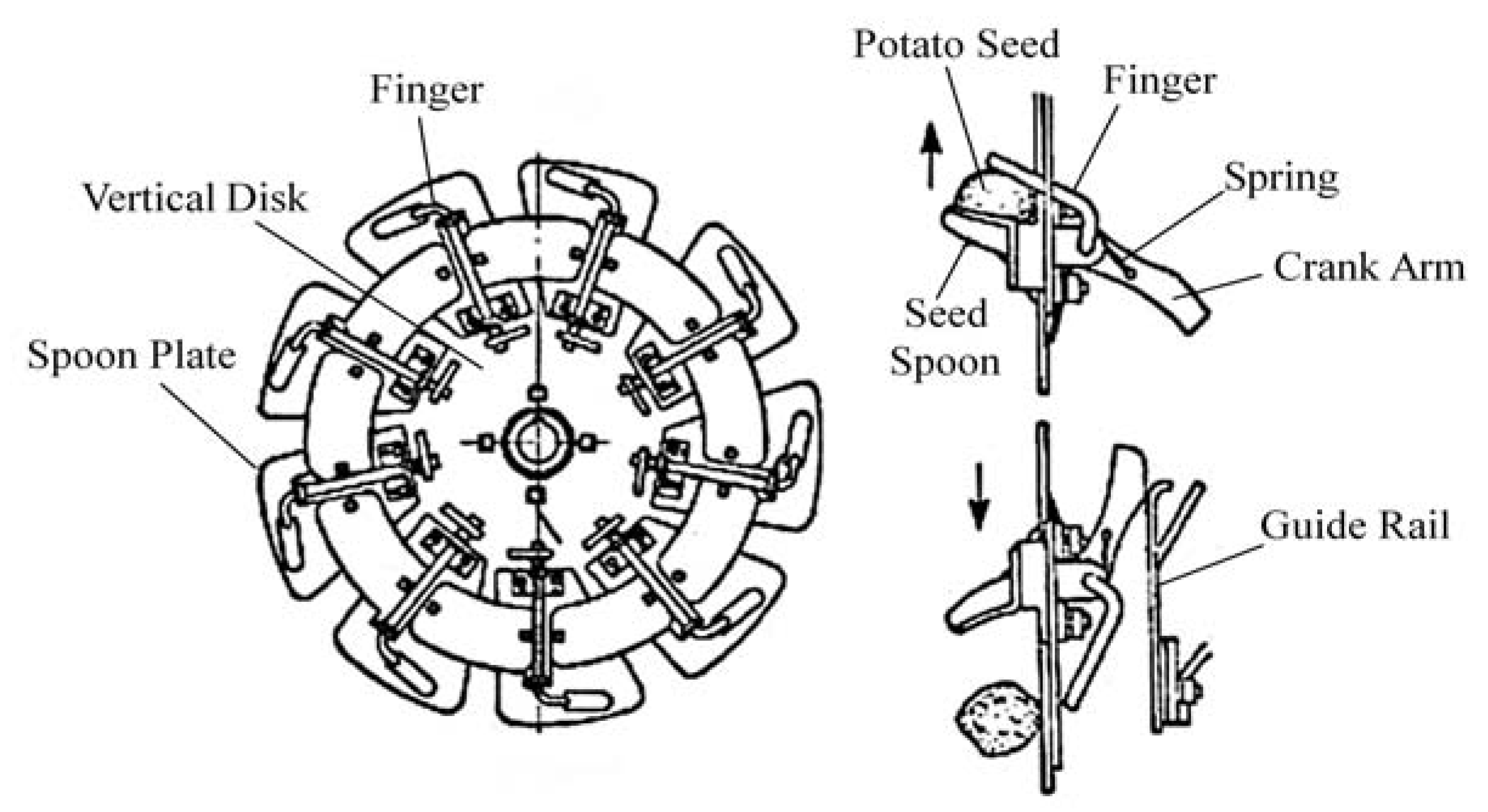
For the pickup finger seed metering device (Figure 10), a vertical disk equipped with a certain number of spring-loaded fingers are rotating in a seed box. The fingers touch the vertical disk under elastic force and open in sequence when traveling to the bottom of the seed box, and each finger picks up a single potato seed. Then, the potato seeds are carried by the fingers with the rotation of the vertical disk and open in sequence again when traveling to the seed dropping area, and release seeds above the seed furrow. This kind of metering device is suitable for seeding whole or cut potato seeds. In order to improve the seeding performance of the pickup finger seeding device, Chen S.Y. [39] designed a novel device, in which the finger closes and opens along with peripheral direction. Field tests indicated that it has a good performance.
2.6. Needle-Stabbed Seed Metering Device
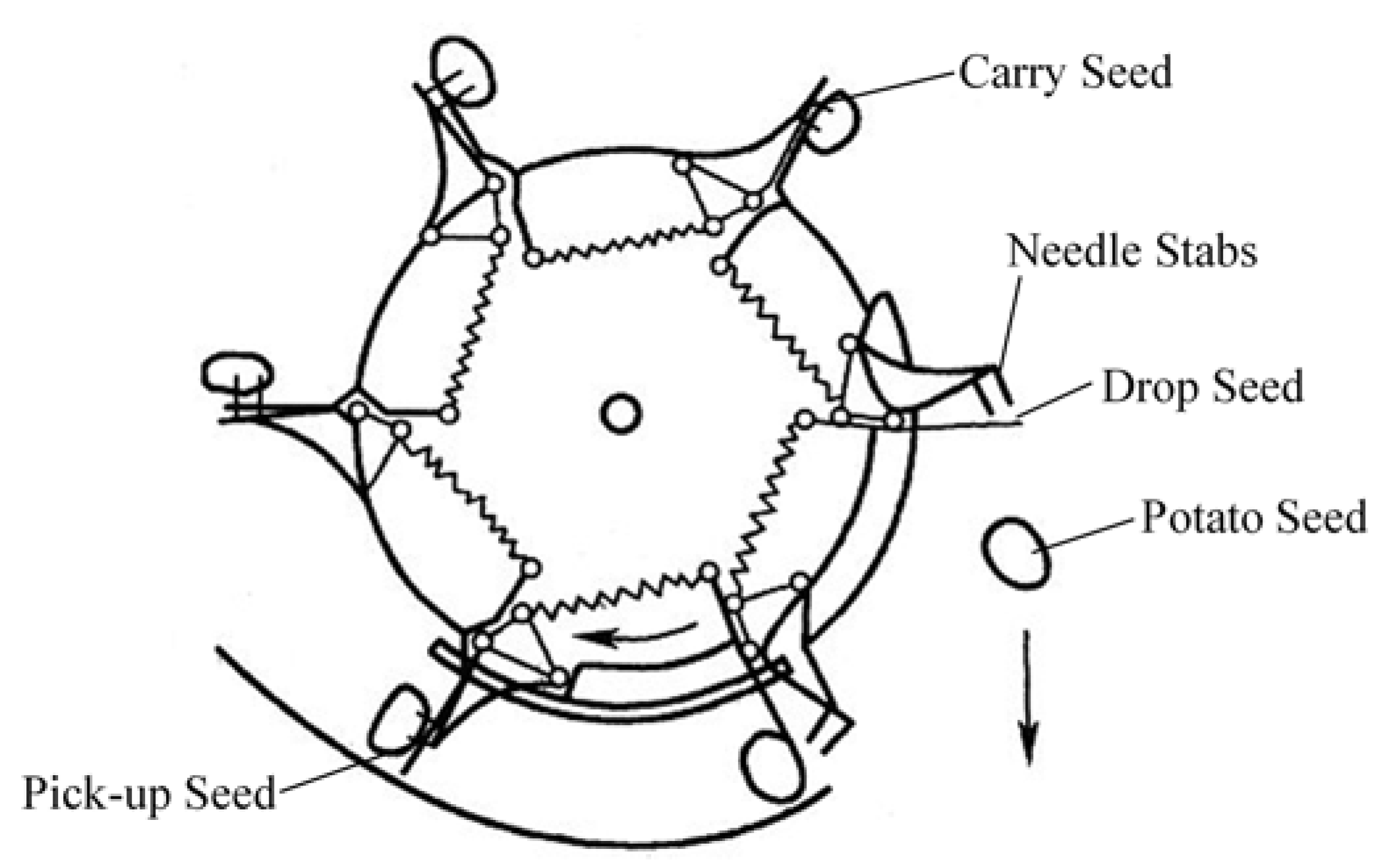
For the needle-stabbed seed metering device (Figure 11), elastic plastic needles are mounted on the edge of a vertical disk and rotate with the vertical disk in a seed box. Each needle stabs and grabs one seed in sequences in the seed feeding area. Potato seeds are carried by needles with the rotation of the vertical disk, and then the needles are pulled out from the potato seed as they travel to the seed dropping area and seeds are dropped into the seedbed. Due to the mechanical structure of the needle-stabbed seeding device, the shape and size of potato seeds have little impact on its planting spacing uniformity.
Seeding performance is an important factor for the seed metering device. Misener G.C. [40] evaluated the seed piece distribution patterns achieved by cup- and needle-stabbed-type potato planters through a large number of trials. Results indicated that the needle-stabbed seed metering device operated slightly more effectively than the cup type. Furthermore, based on the premier research, Misener G.C. [41] studied the effect of seed size and type on seeding performance of potato planters. It was concluded that the size of the seed had little effect on the miss/multiple seeding index, and whole potato seeds had a smaller miss-seeding index than the cut potato seed.
3. Application Status of Potato Planter
This section summarizes currently available potato planters around the world and classifies these machines into three categories: potato planters for manual/animal, two-wheel tractor, and four-wheel/crawler tractor traction.
3.1. Manual/Animal-Powered Potato Planters
Potato planters for human/animal power represent the most basic form of mechanization. In order to enhance productivity regarding energy efficiency and ergonomics, it is necessary to improve the design quality of the equipment. In addition, a demand-driven development and innovation system is essential for the adoption of improved human/animal-powered equipment. Manual/animal traction potato planters usually have a small body and simple structure, are light weight, and are easy to operate. These planters are mainly designed for small plots of land, terracing mountain, or hilly areas [42]. However, this type of planter lacks appeal nowadays because of its low working efficiency and high labor intensity. Some typical planters reviewed are as follows.
3.1.1. Hand-Held Potato Planter
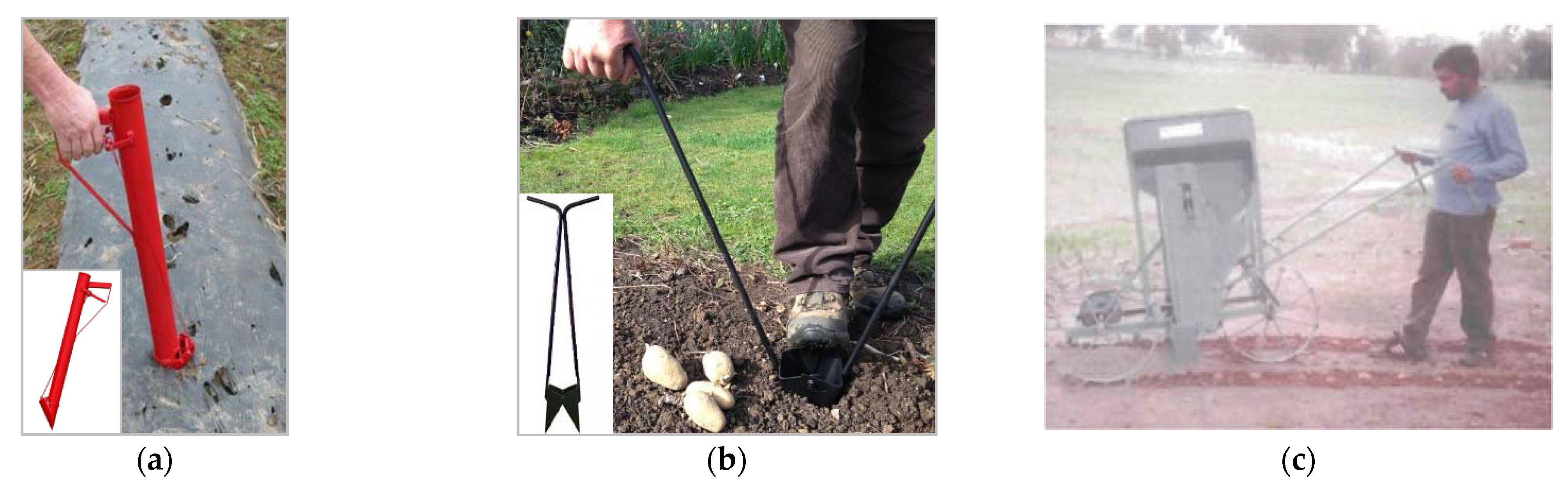
Jab planter (Figure 12a): The jab planter is a typical manual potato planter used for a long period. The planter has a hinged “beak”, which closes and opens under the control of a handbrake (Figure 12a). Potato seed drops into the “beak” when it drives into the soil. The “beak” opens when the foot on the long handle contacts the land surface or clenches the handbrake, then the seed drops into the soil at a certain depth.
Double-handle bulb planter (Figure 12b): This planter mainly contains two blades (which can be closed and opened upon a hinge), two handles, and a hinge; the mechanism enables one to make a hole and deposit the potato seed in one step under foot-driven power. In looser soils, the planter places the potato seed into the cone-shaped reservoir created by the blades, then drives the blades into the ground and opens them to separate the soil and release the potato seed in the soil. In compacted soils, the planter is used much like a post-hole digger, which removes a plug of soil before planting.
Sneeboer potato planter: The Sneeboer potato planter is a potato manual seeding tool commonly used in small areas, such as gardens and small-scale farms. The planter includes a T-handle, a planting tube, and a long handle. The planting tube is a cone shape designed to prevent clogging when planting seed potatoes. Moreover, there is an edged swing fixed on the planting tube, which is used for foot-driving the tube into soil conveniently.
Hand-pushed potato planter: This planter is designed for seeding potato micro-bulbs (e.g., potato mini-tuber) and other large grains of crop seeds, such as onion, garlic, tulip, etc. It has a container for seeds, an opener to place the seeds, a driving wheel to provide power for the seeding device, and a depth wheel to control the seeding depth. In addition, the type of seeding device is a disk brush. The farmer walks behind the seeder and controls it by handlebars. The total weight of the seeder is 30 kg, the working efficiency is 0.11 ha/h, and the seeding inaccuracy is less than 9.0%.
Manual-drawn potato planter (Figure 12c): The Central Potato Research Institute of India developed a two-row manually drawn potato planter of cup type [45], which is suitable for small and marginal farmers. The seed metering device consists of two rubberized belts with 16 MS sheet cups riveted on each belt which have been made spring-loaded in order to counter jerks. The planter works more efficiently with graded potato seeds. The working efficiency is 0.5 ha/d, the miss-seeding rate is less than 0.5%.
3.1.2. Animal-Powered Potato Planter
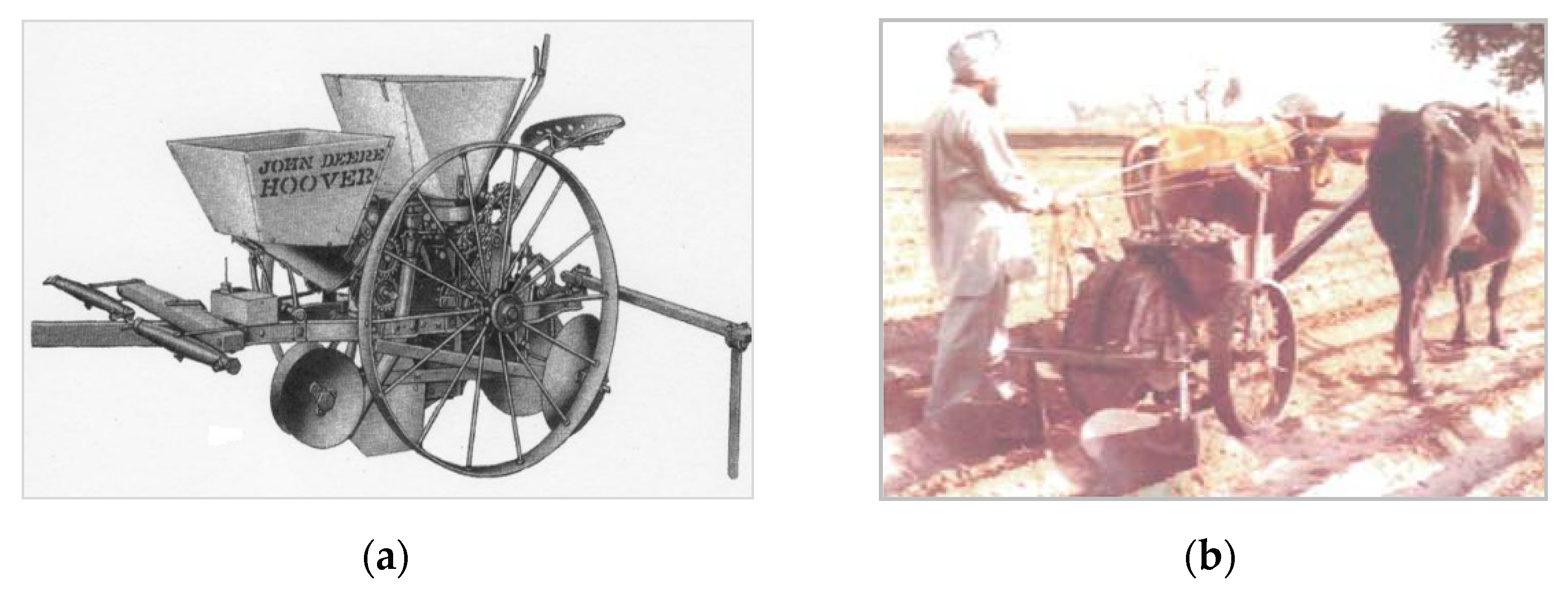
As the popularity of potatoes grows around the world, inventions to improve potato planting began flooding the market. In the 18th century, the first animal-powered potato planter was developed to promote working efficiency. Since then, the animal-powered potato planter developed rapidly because of its high efficiency, low manual power consumption, and good seeding quality. The animal-powered potato planter is usually drawn by horse or ox, and completes the operation of furrow opening, seeding, covering, and ridging in one pass. However, the application of the animal-powered potato planter became less and less after the tractor came into being. Some once-popular animal-powered potato planters are shown as follows (Figure 13). The John Deere One-Row Planter is suitable for planting whole or cut, treated or un-treated potato seeds. Ridges of high-wide, low-narrow, or with any desired variation can be obtained by adjusting the characteristic parameters of the soil covering disc. In addition, there is a fertilizing device attached on the planter for fertilizing. For the animal-drawn potato planter developed by Central Potato Research Institute of India [45], potato seeds are dropped and covered while making a ridge simultaneously. The seed metering device consists of a hollow rotor with cups fixed on it. A manually operated clutch and a lifting arrangement have been provided. Seeding space can be adjusted in the range of 16–30 cm. The working deficiency and seed damage rate are 0.9 ha/day and less than 0.5%, respectively, while with small seed missing rate.
3.2. Two-Wheel Tractor-Driven Potato Planter
There are greater interests in mechanization for crop planting in smallholder agriculture. However, mechanized planters mounted on four-wheel tractors are not suitable for small-size farmland. Therefore, two-wheel tractors are widely used by small farmers to provide power for mechanized potato planting in small-size farmland because of their small size and easy maintenance, etc. [46,47]. According to the way of clutching potato seeds from hopper to the seed drop tube, the two-wheel tractor-driven potato planters can be divided into artificial assisted and mechanized seed delivery types. The cup-type seed metering device is usually used for seed delivery. Some typical artificial assisted and mechanized seed delivery planters for two-wheel tractor are described as follows.
3.2.1. Artificial Assisted Seed Delivery Planters
The main components of this planter (Figure 14) are a seed drop tube, furrow opener, soil covering plates, etc. Furthermore, there is a rotary tiller in front of the furrow opener to conduct rotary tillage operation. The seed box filled with potato seeds is fixed on the tractor and not far from the operator. In this way, the operator can control the tractor and put the seeds into the seed drop tube at the same time during the operation of potato seeding, which enables single-person operation. As can be seen from the planter’s working principle, the seeding space is determined by the operator. Furthermore, the planter can be operated by tow operators, one for tractor control and the other for seed dropping.
3.2.2. Mechanized Seed Delivery Planters
The mechanized seed delivery planter avoids dropping seeds by artificial assistance. Compared with the artificial assisted seed delivery planter, it obtains a higher level of mechanization. There are various models of this kind of planter produced in China, Italy, and Ukraine that are light in weight, matching with small power, and seeding in a single row. These machines are powered by two-wheel tractors with a power range of 8 to 12 hp, net weight of about 100 kg, and working speed of below 3 km/h in general. Although these planters are made by different manufacturers, their differences are not obvious, and their seed metering device is usually the cup type. Some typical commercial potato planters are shown in Table 2.
3.3. Four-Wheel/Crawler Tractor-Driven Potato Planter
Potato planters powered by four-wheel/crawler tractors are the most widely used potato seeding machines all over the world, ranging from large-scale farms to small plot lands. There are several kinds of four-wheel/crawler tractor-driven potato planters. As can be seen from the above discussion, the seed metering device is the key part of a potato planter. Therefore, according to the type of seed metering device, the four-wheel/crawler tractor-driven potato planters can be divided into cup, pneumatic, belt, rotating disc, pickup finger, and needle-stabbed types.
3.3.1. Cup-Type Potato Planter
The cup-type potato planter is the most commonly used seeding machine because of its easy operation, steady working performance, low cost, and convenience in adjusting seeding space. Referring to its seeding ability, there are many different specifications from large machinery to small machinery. For the small-scale planter, the matched power is generally below 20 hp and with a single seeding row. For the large/medium-scale planter, the matched power is usually larger than 20 hp, and with two or more seeding rows. The typical cup-type potato planters are shown as follows.
(1) Cup-type potato planter in small scale
This planter is designed for small plot lands or terracing mountain due to its small size and light weight; the matched power generally is less than 20 hp, which matches a tractor with a three-point suspension. Several researchers such as Hamad et al. [53], Al-Gaadi et al. [54], Ebrahem et al. [5], Wakchaure et al. [55], Gavrilov et al. [56], and Wang et al. [57,58] have made efforts to develop and modify the cup-type potato planter in small scale, to promote the development of this kind of potato planter.
Nowadays, the whole plastic mulching and furrow planting pattern of potato has been widely applied in the arid areas on the Loess Plateau of Northwest China. Several researchers have developed combined potato planters to adapt to this cultivation pattern. For instance, Shi et al. [59] developed a combine potato seeder which could throw and cover soil on a film edge. Dai et al. [60,61] invented a combined potato planting machine for covering soil on top of a full film surface. Key components were designed and operation parameters were confirmed. Sun et al. [62,63] designed a potato planter in 2017 and developed a double-rank multi-rod hill-drop potato planter on plastic film in 2018, respectively. Results indicated that both of the planters work well. In order to realize the hill-drop under plastic film in potato seeding, Sun et al. [64] designed a double-crank multi-rod mechanism and built a prototype.
Furthermore, there are several commercial planters around the world. Some typical machines are shown in Table 3.
(2) Cup-type potato planter in large/medium scale
This kind of planter is suitable for large/medium plots of land; it has a complicated structure and multiple function with high efficiency. Due to its high efficiency, the required power is larger than 20 hp in general. In addition, this kind of potato planter can seed two rows or more in a single pass, and it could be trailed or suspended with the tractor.
Several studies were conducted in design and optimization of the cup-type potato planter in large/medium scale. For example, Mari et al. [68] carried out research to evaluate the performance of the four-row potato planter. Conclusions indicated that this planter is labor-saving. In order to enhance the seeding quality, Lü et al. [69] analyzed the bouncing and casting process of the cup-type potato seed metering device and the performance of the flow deflector, and put forward the optimization methods. Aiming at reducing the costs of potato seeds and labor of workers, a fully automatic in-situ seeding machine for cutting seed potatoes was developed by Cho et al. [70]. Aiming to reduce the inaccuracy of fertilizer in cup-type potato planters, Yang et al. [71] proposed a separated layer fertilization technology based on surface drainage and V-type anti-blocking structure.
The cup-type potato planter in large/medium scale is the most commonly used potato planter all over the world. There are lots of enterprises and various brands of this type equipment. Some typical machines are listed in Table 4.
3.3.2. Pneumatic-Type Potato Planter
The pneumatic-type potato planter has the advantages of a low seed damage rate, high adaptation to seeds size and shape, high sowing speed, etc. Therefore, the development of this kind of planter has been a hot spot of current research. Mao. [80] designed a precision pneumatic planter for virus-free mini-potato, in which the seed metering device has a declined disc. Lü et al. [81] developed an air-powered precision potato planter. The seed metering device applied the novel form with the distributed multi suction arms, and suction nozzles are installed at the end of each arm. In order to meet the conditions of small-plot operation in hilly and mountainous areas and enhance the mechanization level for mini-tuber, Wang et al. [82] designed a precision single-row air-suction planter.
Though the development of the pneumatic-type potato planter has a bright future, few producers manufacture and sell this kind of potato planter around the world nowadays. The successful examples available were from the enterprises of Crary Industries from the US and ERME from France (Figure 15).
Specifically, Crary Industries produces the Lockwood 600 series of pneumatic potato planters, which include three models: 604, 606 and 608. Figure 15a presents the Lockwood 606 pneumatic potato planter. The seed metering device in this planter series adopted a vacuum wheel with stainless steel arms, and the flexible urethane cups allow for higher planting speed while maintaining seed placement accuracy. In addition, this type of planter is suitable for planting whole or sliced potato seeds. The specifications of this series of planter are shown as follows. (1) The hitch type between planter and tractor is pull or semi-mount, and the minimum required power is 140, 180, and 225 hp, respectively. (2) Seeding rows are 4, 6, and 8, respectively. (3) A new larger hopper design eliminates the use of extensions. (4) A radar-controlled hydraulic drive delivers more accurate seeding space, and seeding space can be adjusted in the range of 15.2–45.7 cm. (5) Row spacing is 81.3–101.6 cm, and the maximum planting speed is as fast as 10.5 km/h.
Furthermore, ERME produces the PLMS series pneumatic potato planter. This type of planter is equipped with the traditional vacuum seed metering device and includes seeding rows of 3, 4, 5, 6, 8, and 12. The four-seeding-rows planter is popular (Figure 15b). Take the four-seeding-rows planter as an example; its specifications are represented as follows. There are four seed metering devices, and the minimum row spacing is 35 cm. A vibrator is applied in each seed metering device to ease the flow of seeds. Each row is independent and mounted on a parallelogram system. Planting depth can be adjusted by the rear depth wheels, and the planting density can be adjusted by a set of sprockets. The normal working speed is 2.2 km/h. The pure weight is just 560 kg, which is suitable for the small-area and light-weight tractor.
3.3.3. Belt-Type Potato Planter
The belt planter has a strong adaptability for planting non-calibrated seed potatoes, various sizes, or longish varieties. Several studies were conducted on the design and optimization of this planter. For example, Meijer et al. [85] developed an automatic belt-type planter for pre-sprouted seed. On a laboratory model the shape of the bed, the belt material, and belt speeds were analyzed. Results showed that the planter performed well and the seed damage was low. Misener et al. [86] modified a two-row, horizontal-cup belt planter. Performance tests were conducted and the results showed that with modifications the planter performed well. Arsenault et al. [87] constructed a two-row planter with good performance. Momin et al. [88] carried out a study to evaluate the performance of a two-row planter, and obtained the suitable combination of operation parameters. Aiming at enhancing the mechanization level of potato micro-seed planting, Liu et al. [18] designed a vibration-based seeder.
Due to its strong adaptability, low seed damage, and simple structure, some commercial belt-type potato planters are used in mechanical potato planting. Table 5 shows varieties of this type of machine.
3.3.4. Rotating-Disc-Type Potato Planter
The rotating-disc-type potato planter has strong adaptability, low seed damage, high seeding quality, and low multiple/miss-seeding rate; but manually assisted seed feeding results in high labor intensity and low working efficiency. Furthermore, this type of planter is generally used on small scales. Experts put forward studies that mainly focus on the design of this type of planter. For example, Kohser F. [34], Springer H.J. [35], Heikes A.T. [36], and Osborne J.E. [37] et al. make efforts in structural innovation in terms of the seed metering device and machine, respectively. The scientific research team of Northeast Agricultural University, using this technology, developed a 2CMB2-type two-row planter [31,38]. The development of this planter is mainly targeted at the mixed cropping area with one crop one year and two crops one year systems in Southwest China and the wintering area in South China where the plot is small and the slope is large. Some typical rotating-disc-type potato planters are shown in Table 6.
3.3.5. Pickup-Finger-Type Potato Planter
The pickup-finger-type potato planter has its own characteristics, such as complex structure, suitability for seeding a certain size of seeds, low working speed, and poor seeding quality. In order to promote the development of this kind of planter, some studies were conducted. For example, Frase et al. [92] invented a type of pickup-finger-type potato planter for planting seeds of different sizes and shapes, which avoids trouble for changing seed plates and seed selecting. Plant spacing uniformity is the main parameter of the seed metering device. Boydaş et al. [93,94] investigated the performance of a pickup finger potato planter in laboratory and optimized the combined operation parameters. However, the seeding performance is significantly affected by seed shape as well as size. Moreover, the operation speed is limited to 7 to 9 km/h because of its mechanical structure. Meanwhile, seeds damage is likely to occur during the process of seeds pickup. In the context of high working performance and efficient modern agricultural development, the pickup-finger-type potato planter will be replaced in the longer term [95]. Due to its poor stability and seeding quality, this type of planter has narrow application in agricultural production. Only a few enterprises such as Harriston manufacture and produce the commercial pickup-finger-type potato planter. Figure 16 presents the Harriston Clamp potato planter; it has six seeding rows, and the hitch type between planter and tractor is pull. Seeding space and bowl height can be easily adjusted by the tractor, which has a cab equipped with GPS velocity sensors for precise seed planting.
3.3.6. Needle-Stabbed-Type Potato Planter
The research on needle-stabbed-type potato planters is mainly concentrated in the United States. During the 19th and 20th centuries, some experts applied a number of technical invention patents around the development and innovation of this type of planter. However, this type of planter has the vital disadvantages of promoting seeds damage and virus infection. Nowadays, while few commercial needle-stabbed-type potato planters are available in potato planting, the typical machines are shown as follows. There is the Lockwood 500 series needle-stabbed-type potato planter developed by Crary Industries, which includes three models: 504, 506, and 508. The hitch type between planter and tractor is semi-trailed. The number of seeding rows are 4, 6, and 8, respectively. Both the row space and seeding space are adjustable, and in the range of 81 to 102 cm and 17.8 to 40.6 cm, respectively. The working speed is 0–10.4 km/h, and the matched power is 100.1, 135 and 175 hp, respectively. Figure 17a presents the Lockwood 504 potato planter series of needle-stabbed-type potato planter produced by Harriston with seeding rows of 4, 6, and 8. The planter employs the novel seeding sensor technology, independent seeding element, and hydraulic driving system. Figure 17b shows the Harriston six-row potato planter.
3.4. Comparision of the Above Potato Planters in Different Types
By exploring the development of the technology and equipment of potato planting, it can be confirmed that the cup-type planter is the most widely used planting equipment in the world currently and will continue its dominant position in the future. Due to its simple structure, easy operation, and steady working performance, various specifications of the cup-type potato have been developed from large machinery to small machinery. Moreover, the cup-type potato planter not only can be powered by two/four-wheel tractors in large/small scale, but also can be powered by animal in certain conditions. Compared with the cup-type potato planter, the pneumatic- and belt-type planters have strong adaptability for planting non-calibrated seed potatoes, with a low seeds damage rate, among which, the pneumatic-type planter has no requirement for graded potato seeds and does little damage to seeds. In addition, it can be operated at high speed (more than 10 km/h) with good seeding performance. In addition, the working efficiency and quality can both be guaranteed, which means the pneumatic-type planter has a bright future. While for the belt-type planter, seeding performance is affected by the size uniformity of potato seeds. High seed size uniformity results in good seeding quality; poor seed size uniformity results in poor seeding quality. Therefore, in order to obtain good seeding results, potato seeds need to be graded by size before planting with the belt-type planter. It can be inferred that use of the belt-type planter might increase slightly and at a slow rate in the future.
For the rotating-disc-type potato planter, though it has the advantages of simple machine structure, easy operation, feasibility for seeding various standard potato seeds (cut or whole), and good seeding quality, the manual assistant feeding seeds for dropping makes it highly labor intensive with low working efficiency. This type of planter is generally used on small-scale farmland, terracing mountain, or hilly areas. Though the rotating-disc-type planter is not widespread around the world, it has prospects in developing countries and some developed countries where farmland scale is limited because of the terracing mountain and hilly areas. For the pickup-finger-type potato planter, the irregular shape and size of potato seeds easily leads to a high rate of miss-seeding and multiple seeding. Furthermore, under the pressure of pickup fingers, potato seeds are likely to be damaged during the grasping process. Thus, the pickup-finger-type potato planter has a limited development potential in the future. Similar to the pickup-finger-type planter, the needle-stabbed-type potato planter also faces its development problems as a result of the vital issue of seeds damage and virus infection. Despite the fact that the needle-stabbed-type potato planter has the advantages of high adaptability to different sizes and shapes of seeds with good seeding performance, the vital issue of seeds damage hinders its sustainable development. Furthermore, manual/animal-powered potato planters are usually small, light, simple, and easily manufactured, utilized, and maintained. These planters are invariably used on small farms or hilly regions due to the complicated landform, wavy terrain, and poor traffic conditions. Therefore, the manual/animal-powered potato planter has its necessity of existence.
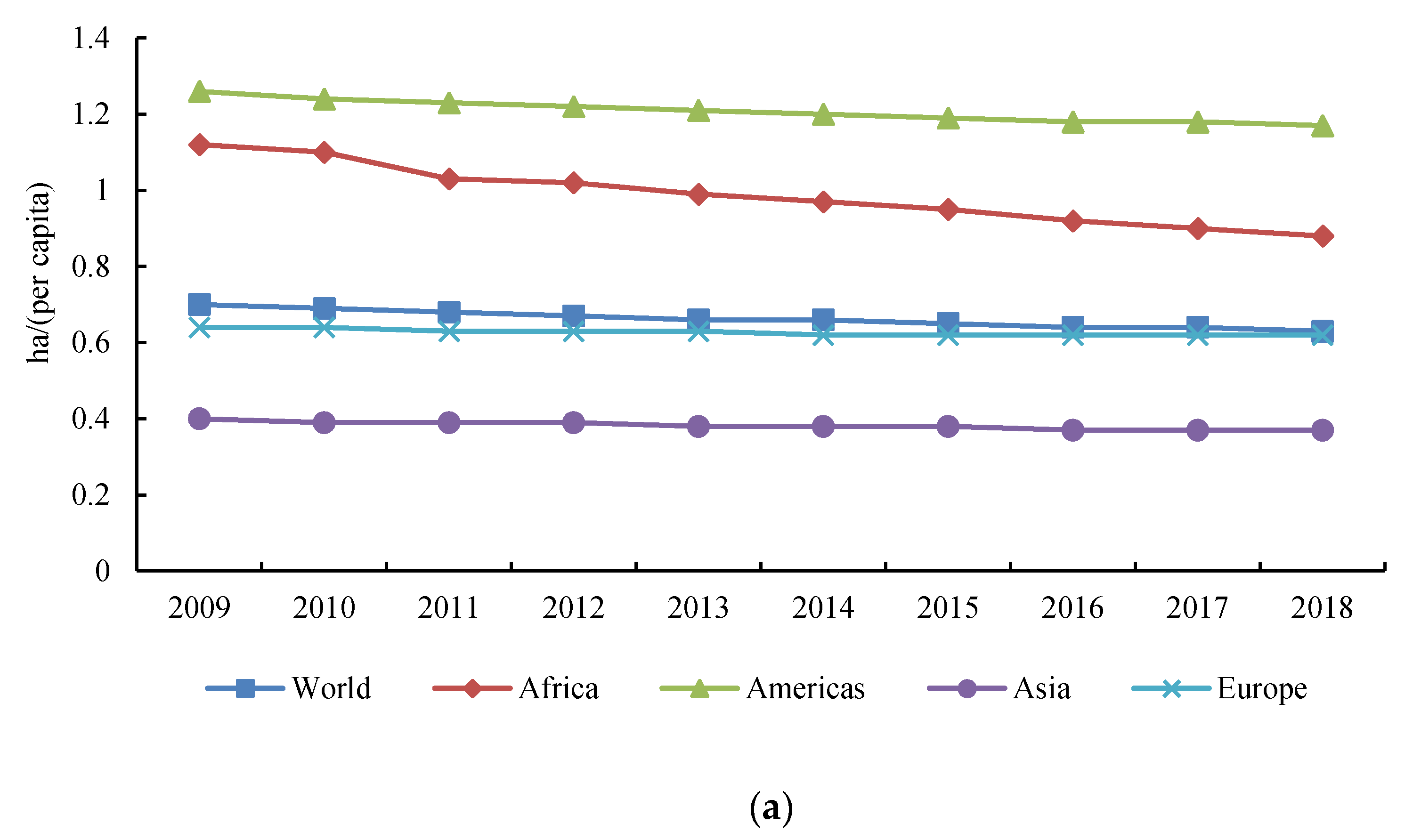
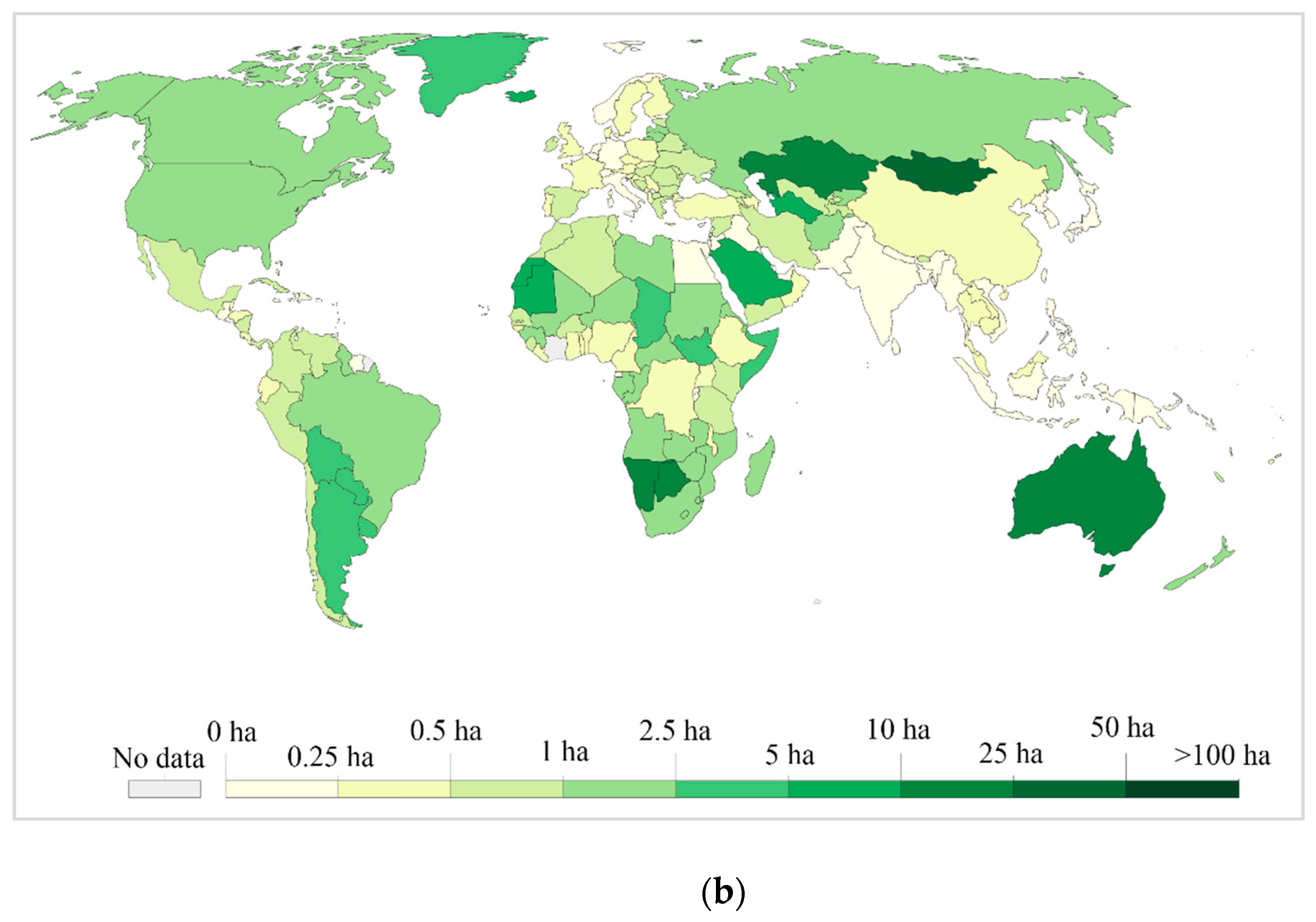
In summary, potato planters ranging from small- to large-scale with different types are available around the world. Farm size and characteristics (landform, slope, etc.) determine the application of potato planter types. Generally, large-sized farmlands are suitable for employing large-scale potato planters, while small-sized farmlands or hilly regions are suitable for choosing small-scale potato planters. It can be concluded that the agricultural land per capita in developed and developing countries may have some potential relationship with the selection of appropriate mechanical planting technology. As can be seen from Figure 18a, Africa goes through an obvious decline in agricultural land per capita, while the Americas, Asia, and Europe show the inconspicuous decline trend. The agricultural land per capita of Asia and Europe is 0.37 ha and 0.62 ha, lower than the world average level of 0.63 ha. As can be seen in Figure 18b, China and India are the world’s top two countries for potato production, while their agricultural land per capita rates are just 0.37 ha and 0.13 ha, respectively. Considering China and India are developing countries, the size of the majority of farmlands is smaller than 1 ha. It can be confirmed that small- or medium-scale potato planters are suitable for potato production in these two countries [97]. Specifically, cup-type potato planters obtain the dominant position for potato production in China and India currently and their position will be steady in future. Most other countries in Asia are in a similar situation. For Europe, the agricultural land per capita is a little lower than that of the world level. However, most counties in Europe are economically advanced with fewer people engaged in farming. The percentage of large-sized farms in Europe is higher than in Asia, which is about 30%. Nevertheless, two-thirds of farms are still smaller than 5 ha in size [98]. For instance, there are 111,740 farms smaller than 2 ha in size operating a total of 212,000 ha of agricultural land [99,100]. There are numerous farms in Europe, with different geologies, topographies, and climates. Various kinds of potato planters are available for potato production in Europe, such as large-scale planters (cup type, belt type, etc.) for large-sized farm, small-scale planters (cup type, rotating disc type, manual-powered type, etc.) for small-sized farmland and fields in hilly regions. In North America, the United States and Canada are the main potato production countries. Take the United States as an example, where there are about 2,023,400 farms, the total farming areas are about 363.2 Mha, and the average farm size is estimated at 179.7 ha [101]. These farms are particularly concentrated in the Great Plains, a vast expanse of flat land that is beneficial to applying large-scale agricultural machines. Consequently, potato planting machines are large-scale, integrated, and automatic in the United States, and the types of potato planter can be cup, pneumatic, belt, pickup-finger or needle-stabbed types. In Latin America, most crop production is based on subsistence agriculture implemented by resource-poor smallholder farmers [102]. A smallholder farm is generally less than 3 ha and dispersed around a village. Despite the high possession of agricultural land per capita (Figure 18a), farms are of small size due to the fragmentation of agricultural land in Latin America, which has a negative impact on the lower field efficiency of machines in irregular plots. Cup-type potato planters with medium or small scales are spread widely in this area. Oceania possesses the largest agricultural land per capita. Australia and New Zealand are the main potato production countries in this region. As developed countries, farms larger than 20 ha in Australia and New Zealand take up 70% of the land [97], which is beneficial to applying large- or medium-scale potato planting machines such as cup- or pneumatic-type planters. For Africa, it is predominantly rural, with 54% of the population engaged in agriculture. Most farmers cultivate small, fragmented parcels of farmland, yet are responsible for food production, making the smallholder farm sector a key player in the continent’s rural economy [103]. Due to poverty, the ecological intensification of agriculture has seldom been addressed in the context of the smallholder farming systems that characterize rural Africa. Therefore, whether deliberately or not, much of African agriculture has remained rather “ecological” [102]. Considering the conditions of the economy and agricultural production, potato planters of manual/animal-powered, two-wheel tractor-driven and four-wheel tractor-driven types with small scale are applicable to service potato production in Africa.
4. Conclusions and Recommendations
Currently, there are various types of potato planters in small, medium, and large scales around the world. However, due to the differences in economy, cropping systems, and geographical and environmental conditions, the level of the development of mechanical potato planting is unbalanced. In order to promote the development of high-performance potato planters, some recommendations are presented as follows.
- (1)
- It is necessary to make efforts in studying the working mechanism of potato planters. Nowadays, problems of poor seeding quality and unstable operation performance exist. To solve them, it is essential to do further research on key technologies in ditching, seeding, fertilizing, and ridging. Moreover, exploring new techniques and using new materials are helpful for promoting a planter’s quality and stability.
- (2)
- Improving the level of automation and intelligentization of potato planters will be the key point of research in the future, among which, digital technologies (i.e., sensors, GPS, machine vision, seeding quality monitoring, etc.) would become the essential components to enhance working quality and efficiency. Thus, the further exploration of potato planting machines should be taken into consideration.
- (3)
- Potato planters suitable for the local economic and geographic conditions in different areas should be promoted. For example, the manual/animal-powered potato planters or the small-scale potato planters powered by tractor are matched with small plot lands, terracing mountain, or hilly areas due to their stability and safety; large/medium potato planters powered by tractor are matched with large/medium-scale farms.
- (4)
- The rapid development of potato planters needs policy support, which includes providing adequate research projects and funds, and encouraging researchers to study innovations in potato planting technologies. Furthermore, a specific targeted subsidy system needs to be established to ensure these planters are affordable for local farmers.
- (5)
- Farmers in different areas are faced with various kinds of problems when using the present commercial potato planter. It is important to solve these problems, which need universities and research institutions cooperating closely with companies. Researchers from universities and research institutions should propose solutions or technologies, and companies should apply these solutions and technologies in time to improve the quality and applicability of potato planters.
Author Contributions
Conceptualization: Z.Z. and W.L.; Z.Z. reviewed the literature and wrote the initial draft of the paper with assistance from H.Z., Z.L., J.H. and W.L.; W.L. contributed to revising the manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Key Industry Chain Innovation Project of Shaanxi Province (Grant No. 2018ZDCXL-NY-03-06).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Birch, P.; Bryan, G.; Fenton, B.; Gilroy, E.; Hein, I.; Jones, J.; Prashar, A.; Taylor, M.; Torrance, L.; Toth, I. Crops that feed the world 8: Potato: Are the trends of increased global production sustainable? Food Secur. 2012, 4, 477–508. [Google Scholar] [CrossRef]
- Gaiero, P.; Speranza, P.; de Jong, H. Introgressive hybridization in potato revealed by novel cytogenetic and genomic technologies. Am. J. Potato Res. 2018, 95, 607–621. [Google Scholar] [CrossRef] [Green Version]
- Monte, M.; Rey, F.; Carboni, M.; Castellote, M.; Sucar, S.; Norero, N.; Colman, S.; Massa, G.; Colavita, M.; Feingold, S. Genetic diversity in argentine andean potatoes by means of functional markers. Am. J. Potato Res. 2018, 95, 286–300. [Google Scholar] [CrossRef]
- Tanios, S.; Eyles, A.; Tegg, R.; Wilson, C. Potato tuber greening: A review of predisposing factors, management and future challenges. Am. J. Potato Res. 2018, 95, 248–257. [Google Scholar] [CrossRef]
- Ebrahem, I.Z.; Ayman, A.E.; Guidetti, R. A new small potato planter for Egyptian agriculture. J. Agric. Eng. 2011, 42, 7–13. [Google Scholar] [CrossRef]
- Mcleod, C.D.; Misener, G.C.; Tai, G.; Caissie, R. A precision seeding device for true potato seed. Am. Potato J. 1992, 69, 255–264. [Google Scholar] [CrossRef]
- Raigond, B.; Verma, A.; Pathania, S.; Sridhar, J.; Kochhar, T.; Chakrabarti, S.K. Development of a reverse transcription loop-mediated isothermal amplification for detection of potato virus a in potato and in insect vector aphids. Crop Prot. 2020, 137, 105296. [Google Scholar] [CrossRef]
- Parajuli, R.; Matlock, M.D.; Thoma, G. Cradle to grave environmental impact evaluation of the consumption of potato and tomato products. Sci. Total Environ. 2021, 758, 143662. [Google Scholar] [CrossRef]
- Jong, D.H. Impact of the potato on society. Am. J. Potato Res. 2016, 93, 415–429. [Google Scholar] [CrossRef]
- Zhang, H.; Xu, F.; Wu, Y.; Hu, H.-H.; Dai, X.-F. Progress of potato staple food research and industry development in China. J. Integr. Agric. 2017, 16, 2924–2932. [Google Scholar] [CrossRef]
- Su, W.; Wang, J. Potato and food security in China. Am. J. Potato Res. 2019, 96, 100–101. [Google Scholar] [CrossRef] [Green Version]
- FAO. FAOSTAT on Production/Yield Quantities of Potatoes in World, 2000–2019. Available online: http://www.fao.org/faostat/en/ (accessed on 2 February 2021).
- Buitenwerf, H.; Hoogmoed, W.B.; Lerink, P.; Muller, J. Assessment of the behaviour of potatoes in a cup-belt planter. Biosyst. Eng. 2006, 95, 35–41. [Google Scholar] [CrossRef]
- Liu, W.; He, J.; Li, H.; Li, X.; Zheng, K.; Wei, Z. Calibration of simulation parameters for potato minituber based on EDEM. Trans. Chin. Soc. Agric. Mach. 2018, 49, 125–135, 142. [Google Scholar] [CrossRef]
- Lü, J.; Yang, Y.; Li, Z.; Shang, Q.; Li, J.; Liu, Z. Design and experiment of an air-suction potato seed metering device. Int. J. Agric. Biol. Eng. 2016, 9, 33–42. [Google Scholar] [CrossRef]
- Liu, W.; Jin, H.; Li, X.; Wei, Z.; Zhang, Z.; Kan, Z.; Zhao, H.; Zhang, Y. Research progress of potato planter. J. Agric. Mech. Res. 2018, 40, 7–13. [Google Scholar] [CrossRef]
- Du, H.; Shang, S.; Yang, R.; Wang, D. Research and analysis on mechanized potato seed sowing techniques. J. Agric. Mech. Res. 2011, 33, 214–217, 221. [Google Scholar] [CrossRef]
- Liu, W.; He, J.; Li, H.; Li, X.; Wei, Z.; Liu, P. Design and experiment of vibration-arranging based seeder for potato micro-seed. Trans. Chin. Soc. Agric. Mach. 2019, 50, 70–80, 116. [Google Scholar] [CrossRef]
- Zheng, D.; Wei, C.; Du, W.; Fan, M.; Liu, G. The study and analysis of cup seed sowing technology and uniformity. J. Agric. Mech. Res. 2016, 38, 106–109. [Google Scholar] [CrossRef]
- Lu, J.; Yang, Y.; Shang, Q.; Li, Z.; Li, J.; Liu, Z.; Wang, Y. Performance optimization test on air-suction potato seed metering device with positive pressure airflow and zero-speed seeding. Trans. Chin. Soc. Agric. Eng. 2016, 32, 40–48. [Google Scholar] [CrossRef]
- Wang, X.; Tang, H.; Wang, J.; Lü, J.; Li, Z. Optimized design and experiment on double-row cross spoon-belt potato precision seed metering device. Trans. Chin. Soc. Agric. Mach. 2016, 47, 82–90. [Google Scholar] [CrossRef]
- Lü, J.; Yang, Y.; Li, Z.; Tian, Z.; Shang, Q.; Wu, J.E. Design and experiment of cup-belt type potato seed-metering device. Trans. Chin. Soc. Agric. Eng. 2016, 32, 17–25. [Google Scholar] [CrossRef]
- Sun, W.; Wang, G.; Wu, J. Design and experiment on loss sowing testing and compensation system of spoon-chain potato metering device. Trans. Chin. Soc. Agric. Eng. 2016, 32, 8–15. [Google Scholar] [CrossRef]
- Niu, K.; Fang, X.; Liu, Y.; Lu, C.; Yuan, Y. Optimized design and performance evaluation of an electric cup-chain potato metering device. Int. J. Agric. Biol. Eng. 2017, 10, 36–43. [Google Scholar] [CrossRef]
- Wanzhi, Z.; Chenglong, L.; Zhaoqin, L.; Xieteng, Q.; Haoyu, L.; Jialin, H. Optimized Design and Experiment on Novel Combination Vacuum and Spoon Belt Metering Device for Potato Planters. Math. Probl. Eng. 2020, 2020, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Zhai, G.; Bao, D.; Wang, Z.; Yang, L.; Li, F. Design of metering device key parts of pneumatic grass seeder. J. Earth Sci. Eng. 2014, 45, 47–51. [Google Scholar] [CrossRef]
- Singh, R.C.; Singh, G.; Saraswat, D.C. Optimisation of design and operational parameters of a pneumatic seed metering device for planting cottonseeds. Biosyst. Eng. 2005, 92, 429–438. [Google Scholar] [CrossRef]
- Lai, Q.; Ma, W.; Su, W.; Hu, Z.; Xing, J. Design and experiment of pneumatic disc seed-metering device for mini-tuber. Trans. Chin. Soc. Agric. Mach. 2016, 47, 30–37. [Google Scholar] [CrossRef]
- Lai, Q.; Ma, W.; Liu, S.; Su, W.; Zhang, Z. Simulation and experiment on seed-filling performance of pneumatic disc seed-metering device for mini-tuber. Trans. Chin. Soc. Agric. Mach. 2017, 48, 44–53. [Google Scholar] [CrossRef]
- Mao, Q.; Huang, M.; Huang, J.; Duan, H. Experiment on pneumatic metering device with declined disc for virus-free seed potato. Chin. Potato J. 2013, 27, 112–118. [Google Scholar]
- Li, Z.; Wen, X.; Lu, J.; Li, J.; Yi, S.; Qiao, D. Analysis and prospect of research progress on key technologies and equipments of mechanization of potato planting. Trans. Chin. Soc. Agric. Mach. 2019, 50, 1–16. [Google Scholar] [CrossRef]
- He, Y.J. The Research of the New Potato Seed Sowing Device for Planter. Master’s Thesis, China Agricultural University, Beijing, China, 2006. [Google Scholar]
- Liu, W.; He, J.; Li, H.; Li, X.; Lu, C.; Wei, Z.; Su, G.; Zhao, H.; Liu, P.; Wang, C. Seeding performance optimization on vibration-arranging type seeding device for potato micro-seed. Trans. Chin. Soc. Agric. Eng. 2019, 35, 1–11. [Google Scholar] [CrossRef]
- Kohser, F. Potato Planter. US0736981A, 25 August 1903. [Google Scholar]
- Springer, H.J. Potato Planter. US0744984A, 24 November 1903. [Google Scholar]
- Heikes, A.T. Potato Planter. US0997674A, 11 July 1911. [Google Scholar]
- Edgar, O.J. Potato Planter. US2642909A, 23 June 1953. [Google Scholar]
- Lü, J.; Tian, Z.; Ying, Y.; Shang, Q.; Wu, J.; Li, Z.; Wang, X. The development situation, existing problems and development trend of potato machinery. J. Agric. Mech. Res. 2015, 37, 258–263. [Google Scholar] [CrossRef]
- Chen, S. Study on the device for discharging and supplying potatoes of potato planter. Cereals Oils Process. 1982, 17–24. [Google Scholar]
- Misener, G.C. Relative performance of cup and pick type potato planters. Can. Agric. Eng. 1979, 21, 131–134. [Google Scholar]
- Misener, G.C. Potato planters—Uniformity of spacing. Trans. ASAE 1982, 25, 1504–1505. [Google Scholar] [CrossRef]
- Gulati, S.; Singh, M. Design and development of a manually drawn cup type potato planter. Potato J. 2003, 30, 61–62. [Google Scholar]
- Stand ‘n Plant. The Hand-Held Jab Planter. Available online: https://www.standnplant.com/index.php/planter (accessed on 3 March 2020).
- Groves Nurseries & Garden Centre. Potato Planter Tool. Available online: https://grovesnurseries.co.uk/Potato-Planter-Tool (accessed on 15 October 2020).
- Singh, M.; Gulati, S.; Singh, S. Farm. Equipment and Machines for Potato Production; Central Potato Research Institute: Himachal Pradesh, India, 2008. [Google Scholar]
- Bell, R.W.; Haque, M.E.; Johansen, C.; Vance, W.; Kabir, M.E.; Musa, M.A.; Mia, M.N.N.; Neogi, M.G.; Islam, M.A. Mechanised minimum soil disturbance establishment and yield of diverse crops in paddy fields using a two-wheel tractor-mounted planter suitable for smallholder cropping. Exp. Agric. 2018, 54, 755–773. [Google Scholar] [CrossRef]
- Pushpitha, N.P.G.; Weerasinghe, K.D.N.; Maier, D. Modification of a two-wheel tractor as a versatile power machine for post disaster recovery programs. Procedia Eng. 2018, 212, 614–621. [Google Scholar] [CrossRef]
- Kim, P. Nibbi AE 11 with Homemade Potato Planter Powered by Two Wheel Tractor. Available online: https://www.youtube.com/watch?v=GJKj8qKH-YA (accessed on 15 October 2020).
- ROSTA Scien-tific Production Company. KSM-1 Potato Planter for Motor Cultivator. Available online: http://www.rostaltd.com/en/equipment-for-motor-cultivators/seeder-ksm-1 (accessed on 18 October 2020).
- F.LLI Spedo. Automatic Potato Planter Baby. Available online: http://www.spedo.it/en/products/potato-planter/automatic-potato-planter-baby/ (accessed on 15 October 2020).
- Weifang Luke Machinery Co., Ltd. Potato Planter 1 Row. Available online: https://www.alibaba.com/product-detail/potato-planter-1-row_60161270110.html?spm=a2700.details.maylikeexp.1.4a804065hwyjKR (accessed on 15 October 2020).
- Yucheng Qichen Machinery Co., Ltd. Hand Tractor Belt Potato Planter Seeder. Available online: https://qcnj.en.alibaba.com/product/60724247362-805831511/Hand_tractor_belt_Potato_planter_seeder.html?spm=a2700.icbuShop.41413.17.50be47c972UUZt (accessed on 15 October 2020).
- Hamad, S.A.; Ismail, Z.E.; Hemeda, M.A. Development of a potato planter to plant tuber pieces with previously grown buds. J. Agric. Sci. Mansoura Univ. 1994, 19, 2321–2343. [Google Scholar]
- Al-Gaadi, K.A.; Marey, S.A. Effect of forward speed and tuber characteristics on tuber spacing uniformity for a cup-belt potato planter. Middle East. J. Sci. Res. 2011, 8, 753–758. [Google Scholar]
- Prashant, W.; Shriram, A.; Vikas, R.; Swapnil, D.; Onkar, B.; Atish, P. Design and fabrication of potato planting machine. Int. J. Eng. Technol. Res. 2017, 4, 1057–1060. [Google Scholar]
- Gavrilov, V.; Semenov, A.; Novikov, A.; Ivanov, V.; Terent’Ev, A. Uniform planting of sprouted tubers semi-automatic potato planter. Vestn. Kazan State Agrar. Univ. 2020, 15, 64–70. [Google Scholar] [CrossRef]
- Wang, G.; Sun, W.; Chen, L.-D.; Zhang, H.; Liu, X.; Li, H.; Yang, X.; Yang, H. Realization of an integrated seeding and compensating potato planter based on one-way clutch. Int. J. Agric. Biol. Eng. 2020, 13, 79–87. [Google Scholar] [CrossRef]
- Wang, G.; Sun, W.; Zhang, H.; Liu, X.; Li, H.; Yang, X.; Zhu, L. Research on a kind of seeding-monitoring and compensating control system for potato planter without additional seed-metering channel. Comput. Electron. Agric. 2020, 177, 105681. [Google Scholar] [CrossRef]
- Shi, L.; Yang, X.; Zhao, W.; Sun, W.; Li, R.; Sun, B. Design and test of potato combine seeder with throwing and covering soil on film edge. Trans. Chin. Soc. Agric. Mach. 2018, 49, 129–137. [Google Scholar] [CrossRef]
- Dai, F.; Xin, S.; Zhao, W.; Liu, F.; Xin, B.; Ma, M. Design and experiment of combined potato planting machine for covering soil on top of full film surface. Trans. Chin. Soc. Agric. Mach. 2017, 48, 56, 76–83. [Google Scholar] [CrossRef]
- Dai, F.; Zhao, W.; Song, X.; Xin, S.; Liu, F.; Xin, B. Operating parameter optimization and experiment of device with eevating and covering soil on plastic-film. Trans. Chin. Soc. Agric. Mach. 2017, 48, 88–96. [Google Scholar] [CrossRef]
- Sun, W.; Liu, X.; Wang, H.; Zhang, H.; Wu, J.; Yang, X.; Wang, G. Design and test of double crank multi-rod hill-drop potato planter on plastic film. Trans. Chin. Soc. Agric. Eng. 2018, 34, 34–42. [Google Scholar] [CrossRef]
- Sun, W.; Liu, X.; Zhang, H.; Wang, H.; Tian, B. Design of potato casingsoil planter in all-in-one machine combined with fertilizing, sowing, ridging, complete film mulching and planting line covering. Trans. Chin. Soc. Agric. Eng. 2017, 33, 14–22. [Google Scholar] [CrossRef]
- Sun, W.; Simionescu, P. Parameter analysis and field tests of a double crank multi-rod under plastic-film hill-drop mechanism potato planter. Am. J. Potato Res. 2020, 97, 256–264. [Google Scholar] [CrossRef]
- Bomet Sp. z o.o. Sp. K. Sadzarka do ziemniaków jednorzędowa Gemini. Available online: https://www.bomet.pl/Sadzarka-do-ziemniakow-jednorzedowa-Gemini.html (accessed on 20 October 2020).
- US Small Farm Equipment Co. 1-Row Cup Type and Assisted-Feed Planter. Available online: https://ussmallfarm.com/product/planters/ (accessed on 10 September 2020).
- Changzhou LEFA Industry and Trade Co. Ltd. 1 Row Potato Planter (20–50 HP Tractor). Available online: https://cnlefa.en.made-in-china.com/ (accessed on 18 May 2021).
- Mari, G.R.; Memon, S.A.; Leghari, N.; Brohi, A.D. Evaluation of tractor operated potato planter. J. Appl. Sci. 2002, 2, 889–891. [Google Scholar] [CrossRef]
- Lu, J.; Wang, Y.; Li, Z.; Dui, H.; Liu, Z.; Li, J.; Sun, H.; Peng, M. Performance analysis and experiment of cup-belt type patato seed-metering device with flow deflector. Trans. Chin. Soc. Agric. Eng. 2017, 33, 19–28. [Google Scholar] [CrossRef]
- Cho, Y.; Choi, I.S.; Kim, J.D.; Oh, J.; Lee, D.H. Performance test of fully automatic potato seeding machine by iIn-situ process of cutting seeds. J. Biosyst. Eng. 2017, 42, 147–154. [Google Scholar] [CrossRef]
- Yang, R.; Yang, H.; Lian, Z.; Zhang, H.; Guo, D.; Zheng, Y. Design and experiment of separated Layer fertilization furrow opener for potato planter. Trans. Chin. Soc. Agric. Mach. 2018, 49, 104–113. [Google Scholar] [CrossRef]
- SWAN AGRO. Cup Type Potato Planter. Available online: https://www.swanagro.in/en/product/potato-planter/29 (accessed on 30 October 2020).
- Standen Engineering Ltd. Standen Potato Planter. Available online: https://standen.co.uk/products/planters/ (accessed on 15 October 2020).
- Shan-Dong Transce Agricul-Tural Machinery Technology Co., Ltd. 2CMX-4B Potato Planter. Available online: http://www.xs-tc.com/malingshuzhongzhijixie/xinghao-2CMX-4Bsilongsixing_39.html (accessed on 7 August 2019).
- GRIMME Landmaschinenfabrik GmbH & Co. KG. Potato Planting Technology. Available online: https://www.grimme.com/de/producttypes/legetechnik/ (accessed on 17 October 2020).
- AVR. AVR Ceres 450. Available online: https://avr.be/en/node/47 (accessed on 15 May 2020).
- Dewulf. Structural-Belt and Miedema Cup Planters. Available online: https://www.dewulfgroup.com/en/product/planting/planters/ (accessed on 15 October 2020).
- Double L. Double L Potato Planter. Available online: https://www.doublelglobal.com/potato-planter.php (accessed on 15 October 2020).
- SPUDNIK Equipment Company LLC. 12 Row Folding Conventional Planter. Available online: https://www.spudnik.com/equipment_planting/equipment_planting.php (accessed on 20 March 2021).
- Mao, Q. Design and research on key components of the planter for virus-free mini-potato seeds. Master’s Thesis, Huzhong Agricultural University, Wuhan, China, 2013. [Google Scholar]
- Lü, J.; Yi, S.; Tao, G.; Mao, X. Design and experiment of precision air-suction type planter for potato. Trans. Chin. Soc. Agric. Eng. 2018, 34, 16–24. [Google Scholar] [CrossRef]
- Wang, F.; Sun, K.; Lai, Q.; Dong, J.; Su, W.; Yu, Q. Design and experiment of minituber precision single-row air-suction planter. Trans. Chin. Soc. Agric. Mach. 2020, 51, 66–76. [Google Scholar] [CrossRef]
- Crary Industries. Air Cup S-Series and Needle-Stabbed Planters. Available online: http://www.lockwoodmfg.com/Lockwood-Potato-Equipment/Planters/ (accessed on 10 March 2021).
- Engineering & Manufacturing Aircraft Tools. PLMS Pneumatic Type Potato Planter. Available online: http://www.erme-france.com/ (accessed on 15 November 2020).
- Meijer, E.; Frederiks, J. Development of an automatic planter for presprouted seed. Potato Res. 1975, 18, 451–454. [Google Scholar] [CrossRef]
- Misener, G.C.; Mcleod, C.D. A plot planter for potatoes. Am. Potato J. 1988, 65, 289–293. [Google Scholar] [CrossRef]
- Arsenault, W.J.; Platt, H.W.; Pippy, E.; Cannon, A. A small plot potato planter. Can. Agric. Eng. 1996, 38, 145–147. [Google Scholar]
- Momin, M.A.; Sarker, M.R.I.; Hossain, M.M. Field performance of a tractor operated semi-automatic potato planter. J. Bangladesh Agril. Univ. 2006, 4, 391–399. [Google Scholar]
- WIFO-Anema BV. Minituber Planter. Available online: https://www.wifo.nl/en/products/planting-machines/planting-machines/minituber-planter (accessed on 15 October 2020).
- IMAC Co. Semi-Automatic Potato Planter. Available online: https://www.imac-rondelli.it/eng/planters.html (accessed on 15 October 2020).
- TEHNOS, d.o.o. Potato Planter with a Fertilizer Dispensing Device and Interrow Cultivator. Available online: http://en.tehnos.si/potato-planter-with-a-fertilizer-dispensing-device-and-interrow-cultivator (accessed on 16 October 2020).
- Frase, R.J.; O’neil, G.R. Finger-Type Planter. US3638829A, 1 February 1972. [Google Scholar]
- Boydas, M.G. Effect of cup size, seed characteristics and angular speed on the performance of an automatic potato planter under laboratory conditions. J. Agric. Sci. 2017, 23, 317–327. [Google Scholar] [CrossRef]
- Boydas, M.G.; Uygan, F. Influence of seed physical properties and speed on the external mechanical damage Index and In-row spacing uniformity in an automatic potato planter. J. Agric. Sci. 2012, 18, 126–136. [Google Scholar] [CrossRef]
- Murray, J.R.; Tullberg, J.N.; Basnet, B.B. Planters and Their Components: Types, Attributes, Functional Requirements, Classification and Description; Ustralian Centre for International Agricultural Research: Canberra, Australia, 2006; p. 140.
- Harriston Industries. Harriston Clamp and Needle-Stabbed Potato Planter. Available online: http://www.harriston-mayo.com/harriston/ (accessed on 15 November 2020).
- Adamopoulos, T.; Restuccia, D. The size distribution of farms and international productivity differences. Am. Econ. Rev. 2014, 104, 1667–1697. [Google Scholar] [CrossRef] [Green Version]
- Eurostat. Farms and Farmland in the European Union-Statistics. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php?title=Farms_and_farmland_in_the_European_Union_-_statistics (accessed on 18 May 2021).
- Lowder, S.K.; Skoet, J.; Raney, T. The Number, Size, and Distribution of Farms, Smallholder Farms, and Family Farms Worldwide. World Dev. 2016, 16–29. [Google Scholar] [CrossRef] [Green Version]
- Laure, L.; Latruffe, P. Does land fragmentation affect farm performance? A case study from Brittany, France. Agric. Syst. 2014, 129, 68–80. [Google Scholar] [CrossRef]
- United States Department of Agriculture. Farms and Land in Farms, 2019 Summary; National Agricultural Statistics Services: Washington, DC, USA, 2020; pp. 5–6.
- Tittonell, P.; Giller, K.E. When yield gaps are poverty traps: The paradigm of ecological intensification in African smallholder agriculture. Field Crop. Res. 2013, 143, 76–90. [Google Scholar] [CrossRef] [Green Version]
- Kuivanen, K.S.; Alvarez, S.; Michalscheck, M.; Adjei-Nsiah, S.; Descheemaeker, K.; Mellon-Bedi, S.; Groot, J.C.J. Characterising the diversity of smallholder farming systems and their constraints and opportunities for innovation: A case study from the northern region, Ghana. NJAS-Wagening. J. Life Sci. 2016, 78, 153–166. [Google Scholar] [CrossRef]
- Hannah, R.; Max, R. Land Use. Available online: https://ourworldindata.org/land-use (accessed on 18 May 2021).
- FAO. FAOSTAT on Agricultural Land Per Capita. Available online: http://www.fao.org/faostat/en/ (accessed on 18 May 2021).
Figure 1.
Production/yield quantities of potatoes in the world, 2000–2019. Date from reference [12]. Copyright 2021 FAO.
Figure 1.
Production/yield quantities of potatoes in the world, 2000–2019. Date from reference [12]. Copyright 2021 FAO.

Figure 2.
Potato production variation of the top five potato producing countries during the period 2000–2019. Date from reference [12]. Copyright 2021 FAO.
Figure 2.
Potato production variation of the top five potato producing countries during the period 2000–2019. Date from reference [12]. Copyright 2021 FAO.

Figure 3.
Global production share of potatoes in different continents during 2000–2019. Date from reference [12]. Copyright 2021 FAO.
Figure 3.
Global production share of potatoes in different continents during 2000–2019. Date from reference [12]. Copyright 2021 FAO.

Figure 4.
Schematic diagram of categories of potato planter.

Figure 5.
Cup-type seed metering device. Reprinted with permission from ref. [19]. Copyright 2016 Chinese Heilongjiang Agricultural Commission.
Figure 5.
Cup-type seed metering device. Reprinted with permission from ref. [19]. Copyright 2016 Chinese Heilongjiang Agricultural Commission.

Figure 6.
Pneumatic-type seed metering device. Reprinted with permission from ref. [31]. Copyright 2019 Chinese Society for Agricultural Machinery.
Figure 6.
Pneumatic-type seed metering device. Reprinted with permission from ref. [31]. Copyright 2019 Chinese Society for Agricultural Machinery.

Figure 7.
Moving-belt-type seed metering device used in commercial planter.

Figure 8.
Cup-belt-type seed metering device. Reprinted with permission from ref. [31]. Copyright 2019 Chinese Society for Agricultural Machinery.
Figure 8.
Cup-belt-type seed metering device. Reprinted with permission from ref. [31]. Copyright 2019 Chinese Society for Agricultural Machinery.

Figure 9.
Revolving disc seed metering device.

Figure 10.
Pickup finger seed metering device. Reprinted with permission from ref. [31]. Copyright 2019 Chinese Society for Agricultural Machinery.
Figure 10.
Pickup finger seed metering device. Reprinted with permission from ref. [31]. Copyright 2019 Chinese Society for Agricultural Machinery.

Figure 11.
Needle-stabbed seed metering device. Reprinted with permission from ref. [31]. Copyright 2019 Chinese Society for Agricultural Machinery.
Figure 11.
Needle-stabbed seed metering device. Reprinted with permission from ref. [31]. Copyright 2019 Chinese Society for Agricultural Machinery.

Figure 12.
Hand-held potato planters. (a) Jab planter. Reprinted with permission from ref. [43]. Copyright 2020 Stand ‘n Plant; (b) double-handle bulb planter. Reprinted with permission from ref. [44]. Copyright 2020 Groves Nurseries & Garden Centre; (c) manual-drawn potato planter. Reprinted with permission from ref. [45]. Copyright 2008 Central Potato Research Institute.
Figure 12.
Hand-held potato planters. (a) Jab planter. Reprinted with permission from ref. [43]. Copyright 2020 Stand ‘n Plant; (b) double-handle bulb planter. Reprinted with permission from ref. [44]. Copyright 2020 Groves Nurseries & Garden Centre; (c) manual-drawn potato planter. Reprinted with permission from ref. [45]. Copyright 2008 Central Potato Research Institute.

Figure 13.
Animal-powered potato planters. (a) John Deere. Reprinted with permission from ref. [45]. Copyright 2008 Central Potato Research Institute; (b) animal drawn. Reprinted with permission from ref. [45]. Copyright 2008 Central Potato Research Institute.

Figure 14.
Artificial assisted seed delivery planter. Reprinted with permission from ref. [48]. Copyright 2020 Google.
Figure 14.
Artificial assisted seed delivery planter. Reprinted with permission from ref. [48]. Copyright 2020 Google.

Figure 15.
Pneumatic-type potato planter. (a) Lockwood 606. Reprinted with permission from ref. [83]. Copyright 2021 Crary Industries; (b) PLMS 4 rows. Reprinted with permission from ref. [84]. Copyright 2020 Engineering & Manufacturing Aircraft Tools.

Figure 16.
Harriston Clamp potato planter. Reprinted with permission from ref. [96]. Copyright 2020 Harriston Industries.
Figure 16.
Harriston Clamp potato planter. Reprinted with permission from ref. [96]. Copyright 2020 Harriston Industries.

Figure 17.
Needle-stabbed potato planters. (a) Lockwood 504. Reprinted with permission from ref. [83]. Copyright 2021 Crary Industries; (b) PLMS 4 rows. Reprinted with permission from ref. [96]. Copyright 2020 Harriston Industries.

Figure 18.
(a) Agricultural land per capita by continent, 2009–2018 (Note: Oceania is not shown in Figure 18a due to its large agricultural area combined with its tiny population). Date from ref. [104,105]. Copyright 2021 Land Use and FAO; (b) global agricultural land per capita in 2018. Date from references [104,105]. Copyright 2021 Land Use and FAO.
Figure 18.
(a) Agricultural land per capita by continent, 2009–2018 (Note: Oceania is not shown in Figure 18a due to its large agricultural area combined with its tiny population). Date from ref. [104,105]. Copyright 2021 Land Use and FAO; (b) global agricultural land per capita in 2018. Date from references [104,105]. Copyright 2021 Land Use and FAO.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Yields of potato in different continents. Date from ref. [12]. Copyright 2021 FAO.
Table 1.
Yields of potato in different continents. Date from ref. [12]. Copyright 2021 FAO.
| Harvested Area 2000 (Mha) | Harvested Area 2019 (Mha) | Quantity 2000 (Mt) | Quantity 2019 (Mt) | Yeild 2000 (t/ha) | Yeild 2019 (t/ha) | |
|---|---|---|---|---|---|---|
| World | 19.89 | 17.34 | 322.77 | 370.44 | 16.23 | 21.36 |
| Africa | 1.25 | 1.76 | 13.18 | 26.53 | 10.54 | 15.07 |
| Americas | 1.92 | 1.54 | 42.19 | 45.08 | 21.97 | 29.27 |
| Asia | 7.97 | 9.30 | 121.49 | 189.81 | 15.24 | 20.41 |
| Europe | 8.70 | 4.70 | 144.20 | 107.26 | 16.57 | 22.82 |
| Oceania | 0.54 | 0.43 | 1.70 | 1.74 | 3.15 | 4.05 |
Table 2.
Comparison of mechanized seed delivery planters.
| Country | Company | Model | Picture | Technical Characteristics |
|---|---|---|---|---|
| Ukraine | ROSTA Scientific Production Company | KSM-1 [49] |  | Cup-chain seed metering device; matched type, mounted; single one seeding row; plate heaves are designed on the edge of ground wheels to prevent slip; equipped with a fertilizer distributor (optional); seeding space, 25/33 cm; working speed, 1.7–2.2 km/h; working efficiency, 0.2–0.3 ha/h; suitable seed size, 4–6 cm; net weight, 50 kg. |
| Italy | F.LLI Spedo | SPA/M [50] |  | Cup-chain seed metering device; matched type, mounted; single one seeding row; two adjustable self-cleaning bedder discs allow variable coverage; seeding depth adjustable; seeding space, 25/30/35/40 cm; net weight, 84 kg. |
| China | Weifang Luke Machinery Co., Ltd. | 2CM-1B [51] |  | Cup-chain seed metering device; matched type, mounted; single one seeding row; attached with a fertilizing device; the fertilizer quantity can be adjusted easily and conveniently; different options for ridge shape can be obtained by changing the angle between two bedder discs and fixed position; net weight, 110 kg, working depth, 8–15 cm, seeding space, 12 cm; matched power, 8–12 hp. |
| China | Yucheng Qichen Machinery Co., Ltd. | Hand tractor belt [52] |  | Cup-chain seed metering device; matched type, mounted; single one seeding row; net weight, 30 kg; sowing depth, 8–15 cm; working width, 12 cm; matched power, 8–12 hp. |
Table 3.
Comparison of the cup type potato planter in small scale.
| Country | Company | Model | Picture | Technical Characteristics |
|---|---|---|---|---|
| Poland | Bomet Sp. z o.o. Sp. K. | BOMET [65] |  | Cup-chain seed metering device; matched type, mounted; single one seeding row; seeding space, 29/32/35 cm; planting depth, 10–15 cm; net weight, 130 kg; matched power, 20 hp. |
| Italy | F.LLI Spedo | SPA/T [50] |  | Cup-chain seed metering device; matched type, mounted; single one seeding row; an adjustable coulter forms a furrow while a chain with cups settles the seeds to the desired depth; two adjustable bedder discs allow variable coverage; seeding space, 25/30/35/40 cm; loading capacity, 50 kg; matched power, 15 hp. |
| USA | US Small Farm Equipment Co. | P-10M [66] |  | Cup-chain seed metering device; matched type, mounted; single one seeding row; sprocket set for six seeding space changes from 20.3 to 38.1 cm; traction tires for less drive wheel slippage results in better seeding space; working efficiency is 0.4 ha/h at forward speed of 3.2 to 6.4 km/h. |
| China | Changzhou LEFA Industry and Trade Co., Ltd. | LF-PT32 [67] |  | Cup-chain seed metering device; matched type, mounted; single one seeding row; net weight, 138 kg; matched power, 20–50 hp; seeding space, 32 cm; row space, 51 cm. |
Table 4.
Comparison of cup type potato planter in large/medium scale.
| Country | Company | Model | Picture | Main Structures and Properties | Technical Characteristics |
|---|---|---|---|---|---|
| INDIA | SWAN AGRO | NSE PPR-2 [72] |  | Matched type, mounted; two seeding rows; two furrow openers; two seed metering devices; row spacing, 60–66 cm; working depth, 13–15 cm; working efficiency, 0.51 ha/h; required power, 40–60 hp. | Fully automatic; agitator available to avoid seeds block problem; double seeding prevention through conveyor vibration mechanism; fertilizer tank is attached with the machine. |
| Italy | F.LLI Spedo | SPA-2/D [50] |  | Matched type, mounted; two seeding rows; two disc openers; four discs with 46 cm; two seed metering devices; pure weight, 480 kg; loading capacity, 500 kg; seeding capacity, 0.4–0.6 ha/h; row distance, 70–90 cm; required power, 50 hp. | The disc openers are attached with a compression spring, allowing work on strong soil; the inclined belt permits work on hilly ground; the hopper is equipped with a rubberized canvas to prevent massive loading of tubers on the belt. |
| England | Standen Engineering Ltd. | SP330 [73] |  | Matched type, mounted; three seeding rows; stainless steel openers and floating side shields; stainless forming hood; three seed metering devices; seeding space, 13–45 cm; required power, 120 hp. | Infrared proximity sensors control the hydraulic floor drive, maintain a regulated level of seeds in the cup area; large upper cup belt rollers lessen the associated ‘flicking’ action and possible chit breakage. |
| China | Shandong Transce Agricultural Machinery Technology Co., Ltd. | 2CMX-4B [74] |  | Matched type, mounted; four seeding rows; four furrow openers; four seed metering devices; manually operated lane marker; row spacing, 90 cm; working width, 360 cm; required power, 125.1–179.9 hp. | Adopting advanced technologies of vibration, lifting seeding, and planting depth control; a disc-type rubber expands the application spacing to 70–90 cm. |
| Germany | GRIMME Landmaschinenfabrik GmbH & Co. KG | GL 420 [75] |  | Matched type, mounted; two seeding rows; infinitely adjustable mechanical shaker; manually operated lane marker; two control valves; four seed metering devices; distance between rows, 75–90 cm; loading capacity is 1200 kg; minimum required power, 122.4 hp. | Potato cultivation with improved protection against erosion; a shaping board for building ridges with specific characteristics from loose to firm soil with a smooth surface; optionally equipped with the systems of Clever Planting, Section Control. |
| Belgium | AVR | AVR Ceres 450 [76] |  | Matched type, trailed; four seeding rows; four hydraulic drive seed metering devices, 40 cups in each planting element; four wheels; hydraulic hopper, capacity is 3500–4000 kg; row spacing, 70–90 cm. | Each individual seeding row assembly is disconnected manually; Culti Control Option maintains constant seeding depth; the ridging hood is operated as standard by an automatic pressure control. |
| Holland | Dewulf | CP 42 [77] |  | Matched type, trailed; four seeding rows; four V-shaped furrow openers; four seed metering devices; distance between rows, 75–90 cm; mechanical or hydraulic drive type; working efficiency, 1.5 ha/h. | Eagle-Eye system monitors the planting process; cups are positioned at a forward angle of 8° in the upwards section to ensure excellent pick-up; GPS and Precision-Planting system ensure seeding quality. |
| USA | Double L | 9560 [78] |  | Matched type, trailed; six seeding rows; six seed metering devices; seeding space, 0–64.77 cm; row spacing, 71.12–101.60 cm; maximum planting speed, 9.66 km/h; minimum required power, 170 hp; hopper capacity, 6600 kg. | Seed flow components prevent seed bridging; equipped with fertilizer function; attached with controllers and receive GPS, radar, and ground speed data from the tractor. |
| USA | SPUDNIK Equipment CO. LLC | 8312 [79] |  | Matched type, trailed; twelve seeding rows; front toolbars; folding type machine; twelve seed metering devices; row spacing, 86.4–96.5 cm; adjustable to plant 3, 6, 9, or 12 rows; seed hopper capacity, 400 cwt. | It is foldable and can be transported from field to field within road restrictions; seed bowl sensors keep the seed bowl at optimum levels; sensors measure the depth on both sides of the front toolbar. |
Table 5.
Comparison of belt-type potato planters.
| Country | Company | Model | Picture | Technical Characteristics |
|---|---|---|---|---|
| Netherlands | Dewulf | Miedema Structural 30 [77] |  | Matched type, trailed; three seeding rows; minimum required power, 80.2 hp; distance between rows, 4–100 cm; seed hopper capacity, 3500 kg; maximum working speed, 11 km/h; the unique planting system limits friction between seeds and prevents damage to seeds; the drive and agitators are powered by hydraulics; small turning circle; possible to switch between planting two and three rows easily. |
| Germany | GRIMME Landmaschinenfabrik GmbH & Co. KG | GB 430 [75] |  | Matched type, trailed; four seeding rows; minimum required power, 122.4 hp; row spacing, 70–91.4 cm; seed hopper capacity, 3500 kg; maximum working speed, 10 km/h; chassis equipped portal pendulum axle, high maneuverability with 35° steering angle; combined with the integrated furrow openers, the Flow-Board XL ensures constant soil cover on seed potatoes. |
| England | Standen Engineering Ltd. | ZENO 21 [73] |  | Matched type, mounted; two seeding rows; matched power, 102 hp; row space adjustable, 76–102 cm; open-center, closed-center, or load-sensing hydraulic systems; depth control can be either manual or hydraulic; a sensor fitted to the RH wheel axle monitors the forward speed. |
| Netherlands | WIFO-Anema BV | MP20 [89] |  | Matched type, mounted; two seeding rows; row space, 75/90 cm; seed box capacity, 1100 L; seeding object, potato mini-tuber or garlic; pressure on the depth wheel can be controlled by a spring; position of the discs can be easily adjusted to change the ridge shape; spraying device can be equipped for applying chemicals during planting. |
Table 6.
Comparison of rotating-disc-type potato planters.
| Country | Company | Model | Picture | Technical Characteristics |
|---|---|---|---|---|
| Italy | F.LLI Spedo | TPA-PP2 [50] |  | Matched type, mounted; two seeding rows; matched power, 29.9 hp; row spacing, 17–45 cm; each element is equipped with a large alveolar plate; seeds are covered by the discs with adjustable inclination or by the ridgers with adjustable wings. |
| Italy | IMAC Co. | PPS-2F [90] |  | Matched type, mounted; two seeding rows; required power, 27.2 hp; row space, 70–90 cm; seeding space, 14–28 cm; seed hopper capacity, 150 kg; pure weight, 165 kg; working efficiency, 1–2 ha/h. |
| USA | US Small Farm Equipment Co. | RP-20M [66] |  | Matched type, mounted; two seeding rows; row spacing can be adjusted according to requirements; maximum working speed, 3.2 km/h; planting depth, 3.3–13.3 cm; row spacing, 107–120 cm; loading capacity, 90 kg; simple and easy to maintain; quick-change sprocket set. |
| Ukraine | ROSTA Scientific Production Company | SLM-1-2 [49] |  | Matched type, mounted; two seeding rows; working efficiency, 0.11 ha/h; seeding accuracy, 92% at least; seeding space, 3.3–6.7 cm; whole weight, 32 kg; suitable for seeding onions-bulbs, garlic, bulbs of a tulip, a gladiolus, potato mini-tubers, etc. |
| Slovenia | TEHNOS, d.o.o. | SK2 [91] |  | Matched type, mounted; two seeding rows; required power, 35.4–65.3 hp; adjustable row space, depth and width of cultivation; working efficiency, 0.1–0.3 ha/h; with a fertilizer dispensing device and interrow cultivator; machine weight, 320 kg. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Zheng, Z.; Zhao, H.; Liu, Z.; He, J.; Liu, W. Research Progress and Development of Mechanized Potato Planters: A Review. Agriculture 2021, 11, 521. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11060521
AMA Style
Zheng Z, Zhao H, Liu Z, He J, Liu W. Research Progress and Development of Mechanized Potato Planters: A Review. Agriculture. 2021; 11(6):521. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11060521
Chicago/Turabian StyleZheng, Zhiqi, Hongbo Zhao, Zhengdao Liu, Jin He, and Wenzheng Liu. 2021. "Research Progress and Development of Mechanized Potato Planters: A Review" Agriculture 11, no. 6: 521. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11060521
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.