Comparison of UAV Photogrammetry and 3D Modeling Techniques with Other Currently Used Methods for Estimation of the Tree Row Volume of a Super-High-Density Olive Orchard

 , ,
, ,  and
and 
Abstract
:1. Introduction
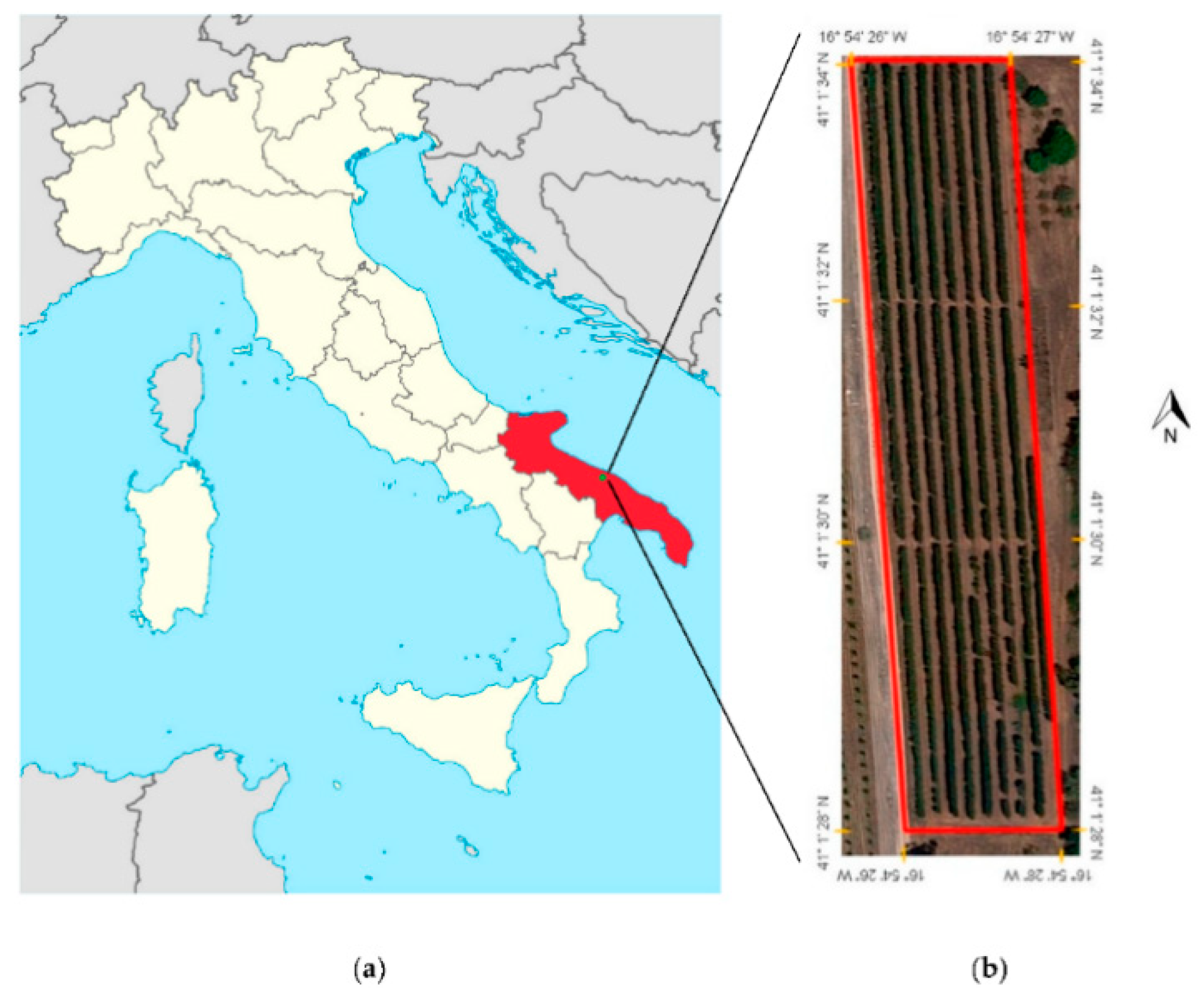
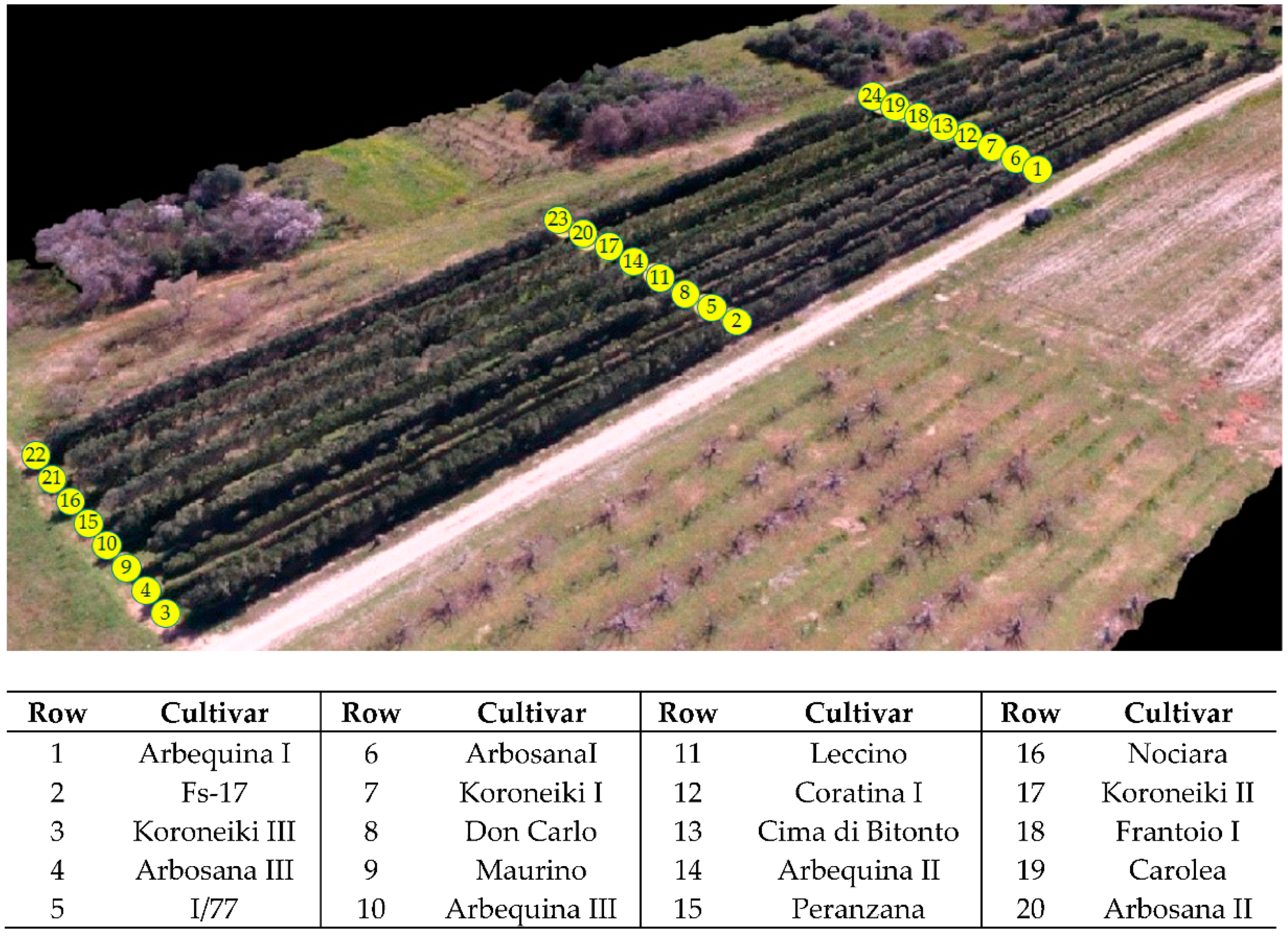
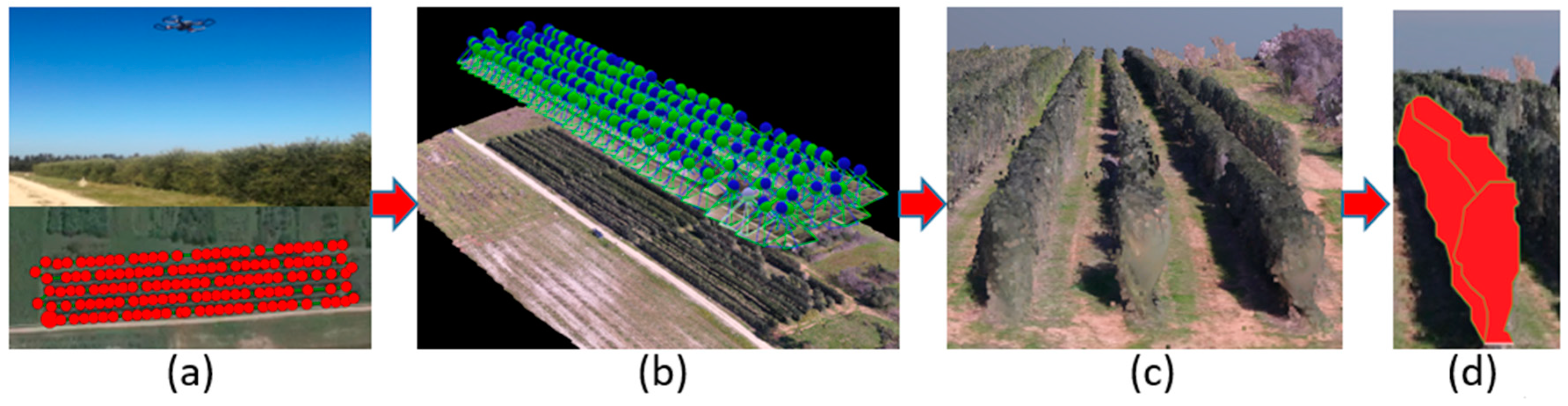
2. Materials and Methods
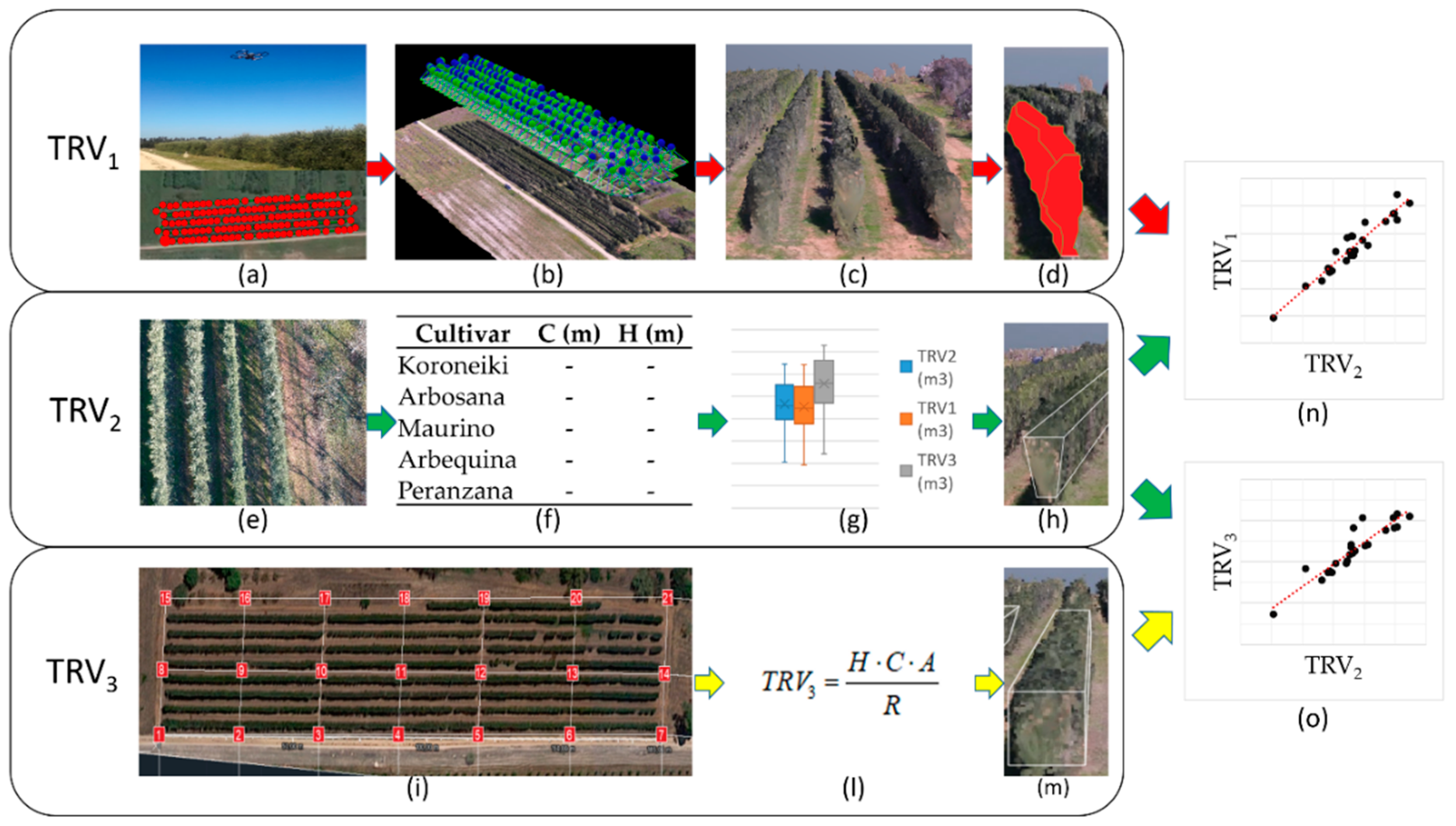
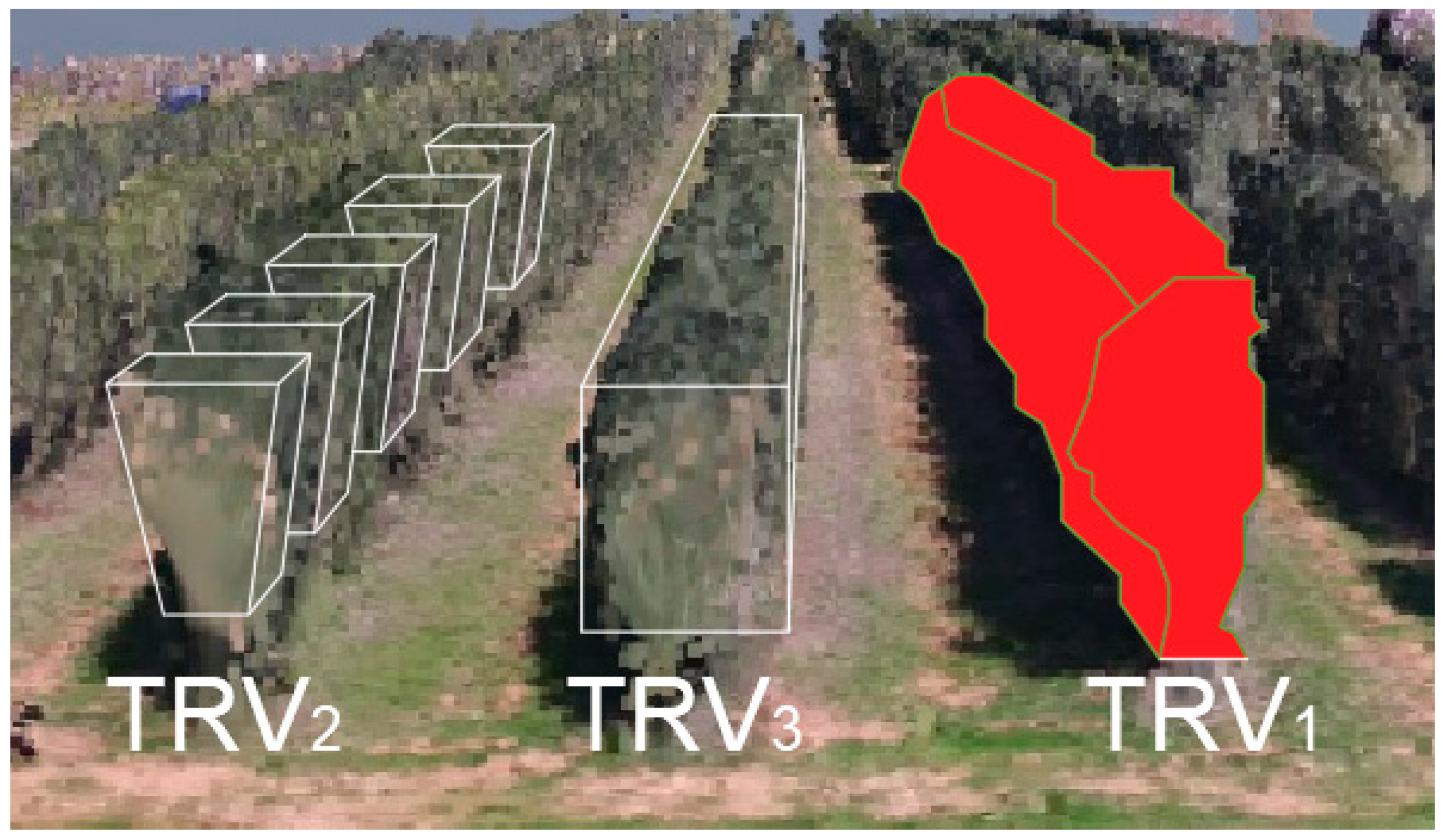
2.1. TRV1 Estimation
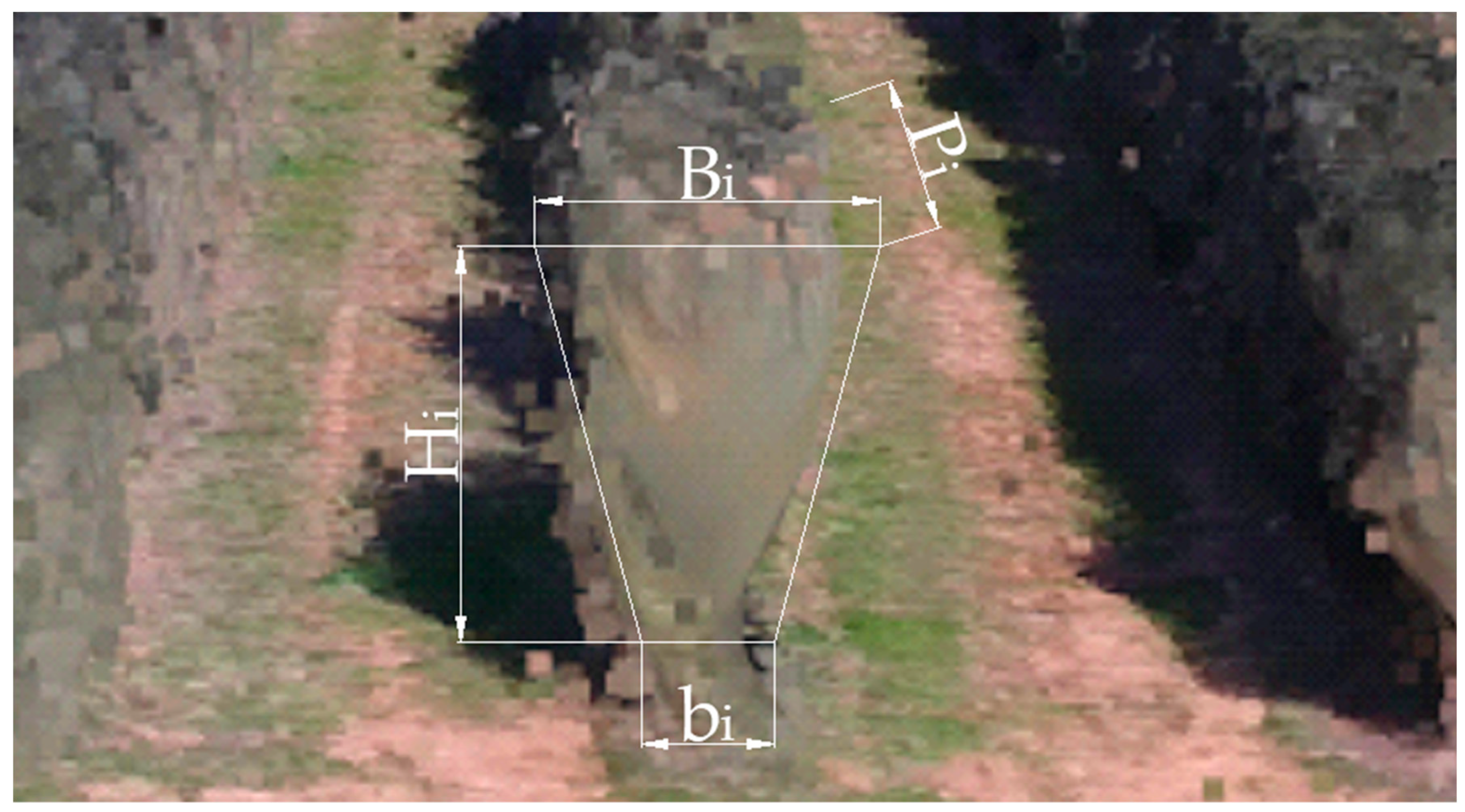
2.2. TRV2 Estimation
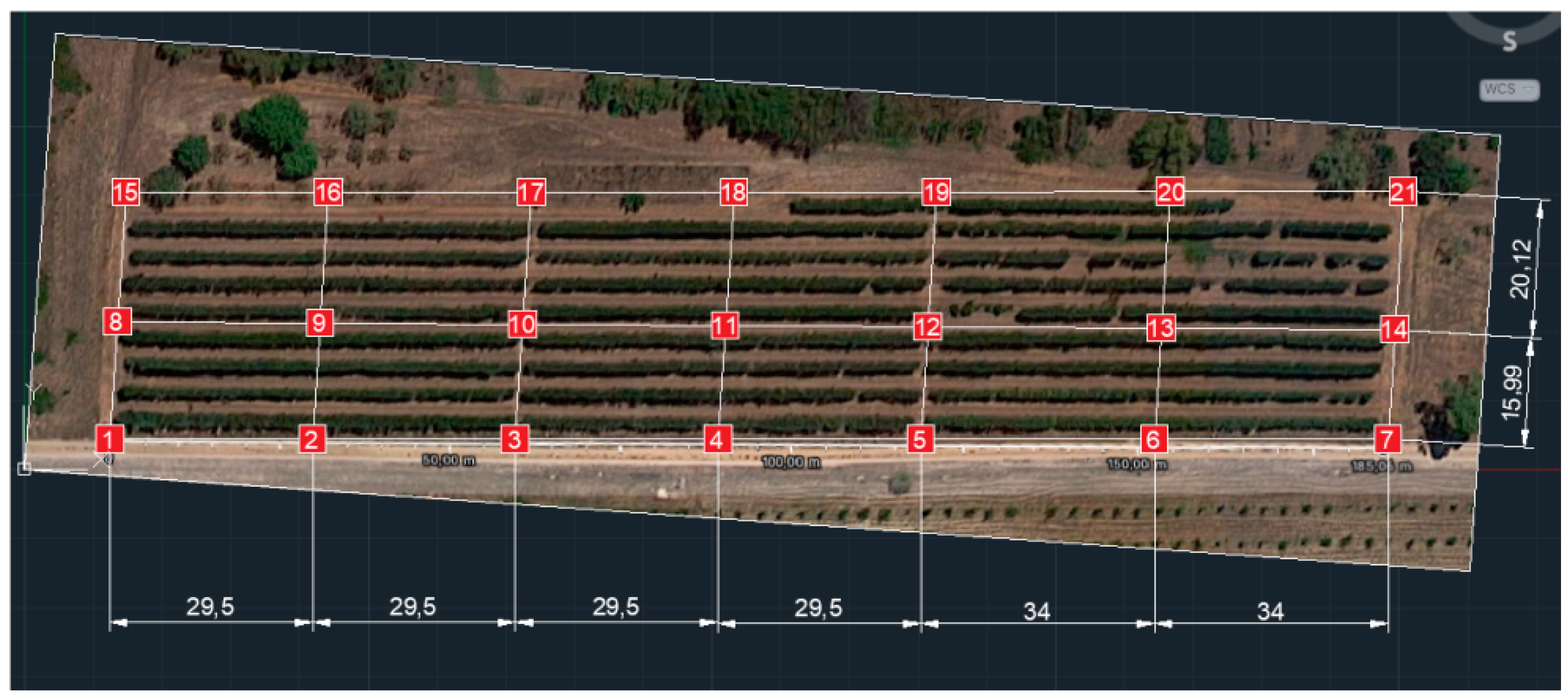
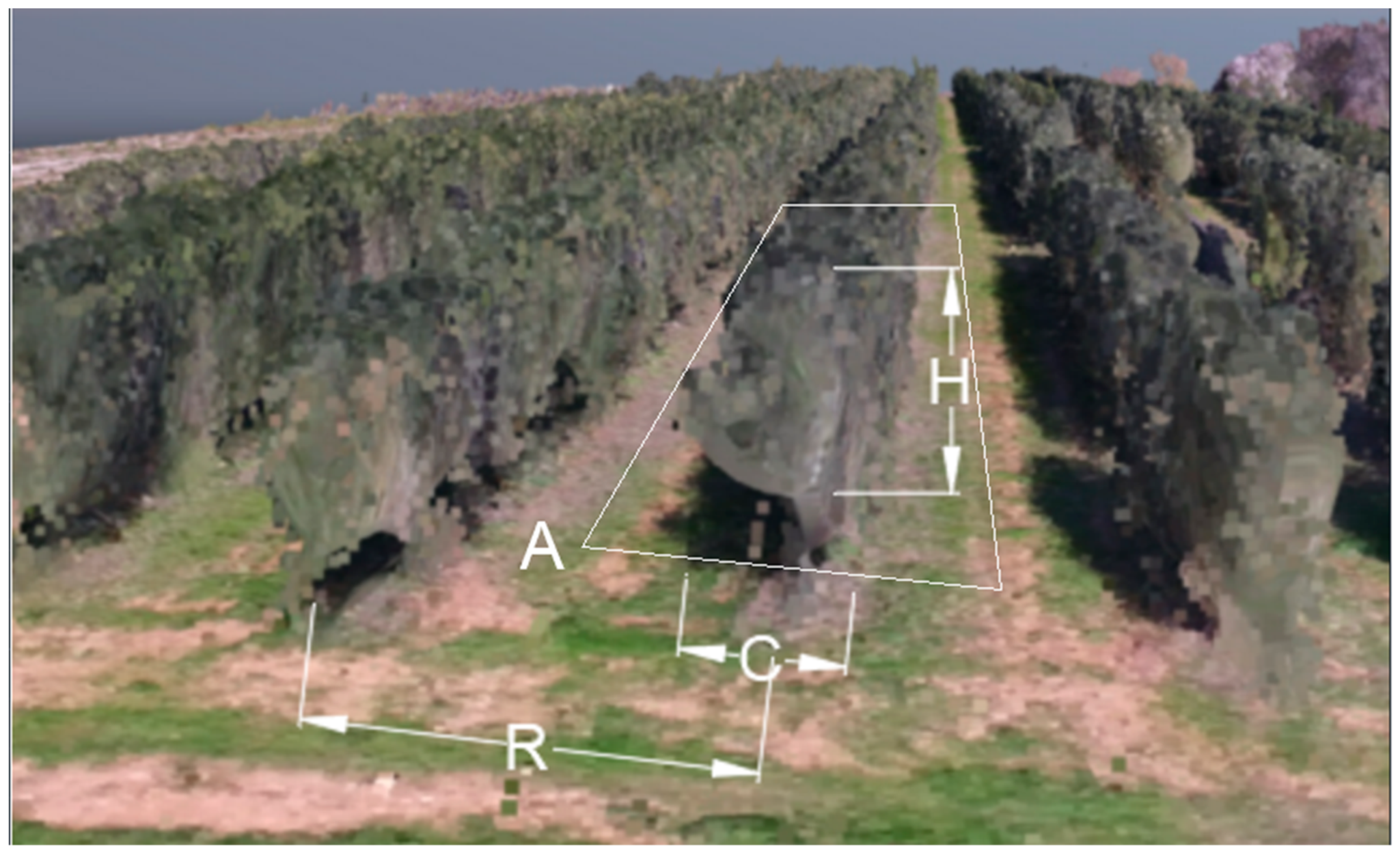
2.3. TRV3 Estimation
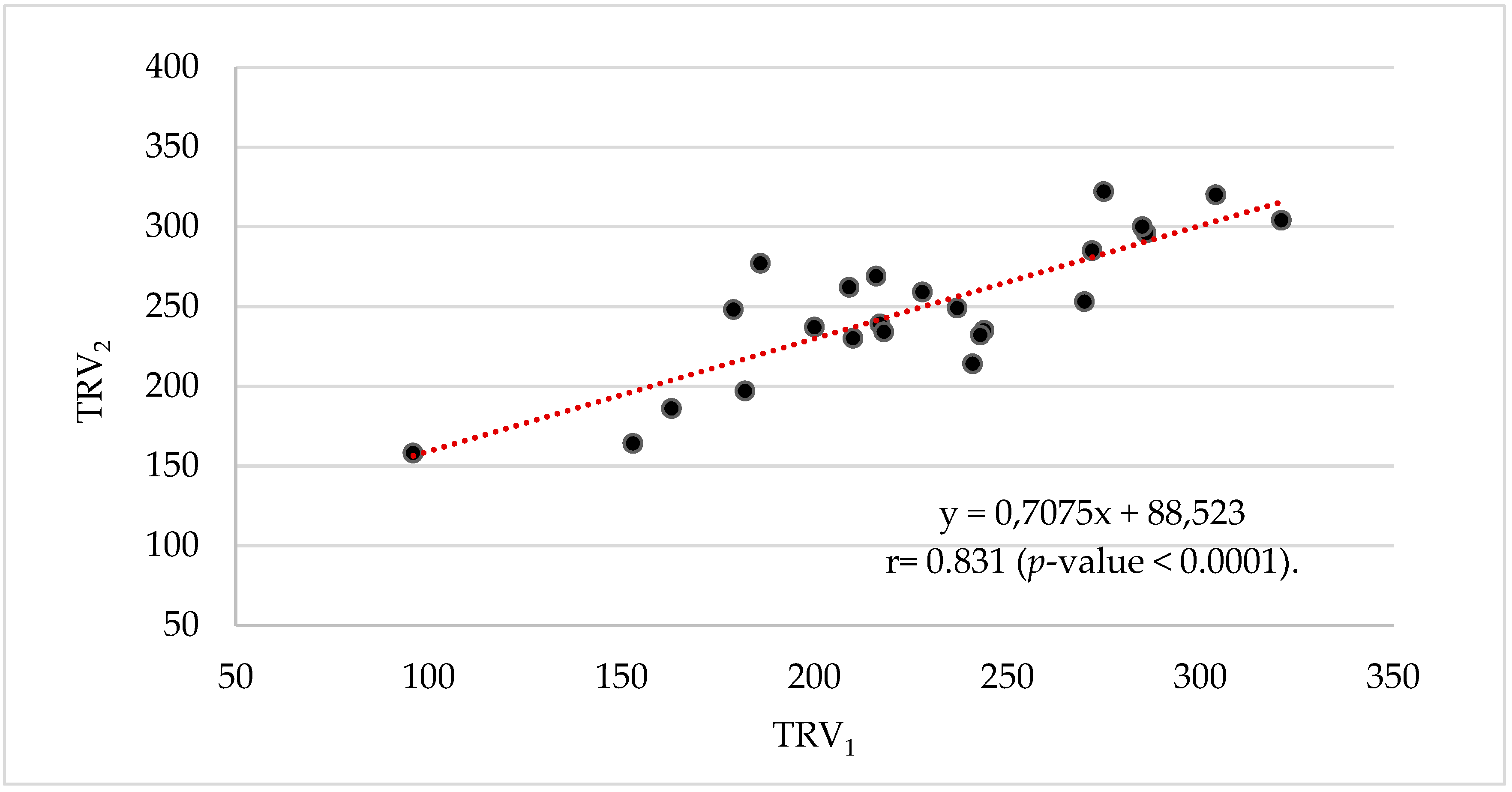
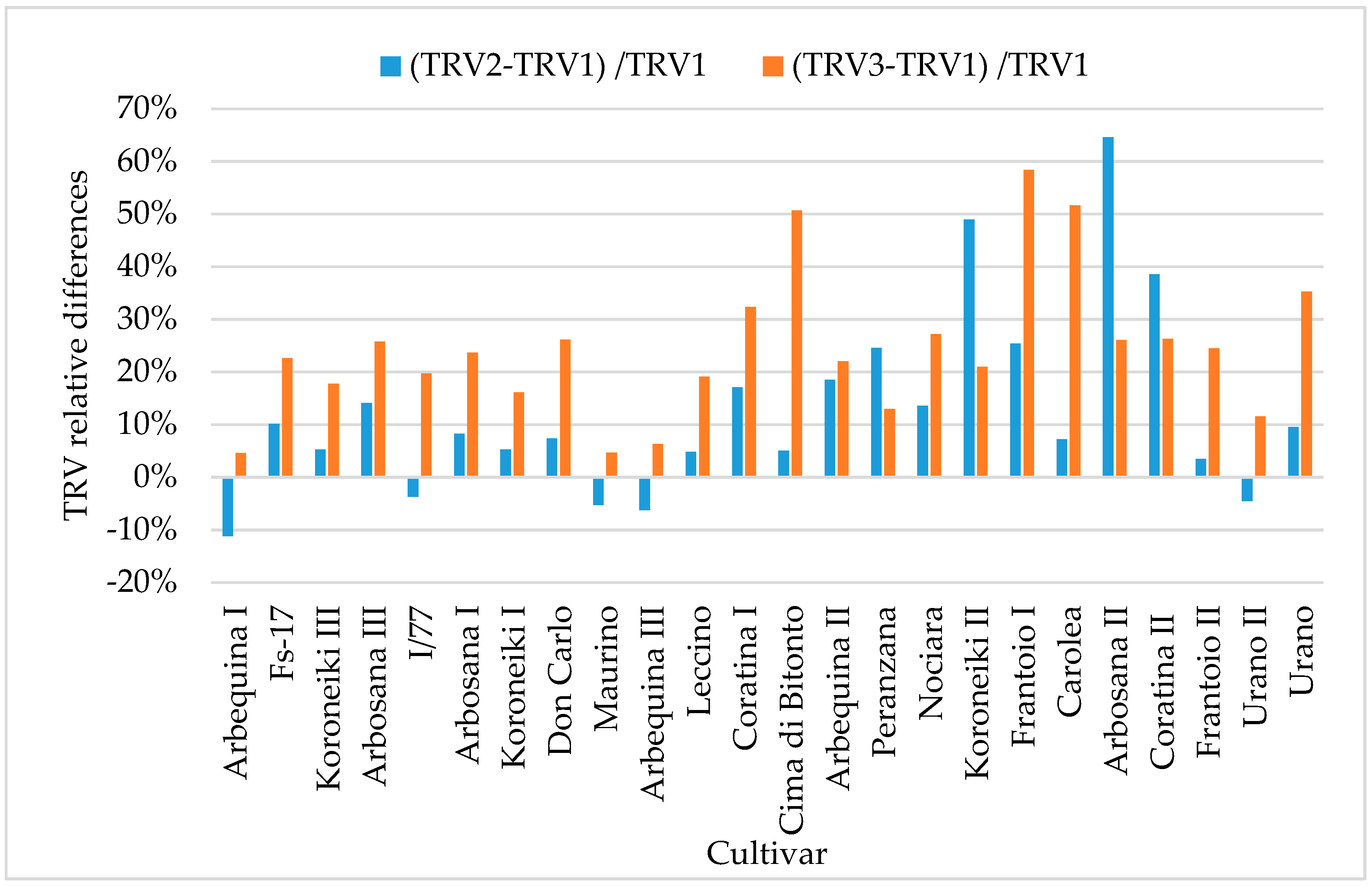
3. Results
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Camposeo, S.; Vivaldi, G.A. Short-term effects of de-oiled olive pomace mulching application on a young super high-density olive orchard. Sci. Hortic. 2011, 129, 613–621. [Google Scholar] [CrossRef]
- Caruso, T.; Campisi, G.; Marra, F.P.; Camposeo, S.; Vivaldi, G.A.; Proietti, P.; Nasini, L. Growth and yields of the cultivar Arbequina in high density planting systems in three different olive growing areas in Italy. Acta Hortic. 2014, 1057, 341–348. [Google Scholar] [CrossRef]
- Connor, D.J.; Gómez-del-Campo, M. Simulation of oil productivity and quality of N-S oriented olive hedgerow orchards in response to structure and interception of radiation. Sci. Hortic. 2013, 150, 90–99. [Google Scholar] [CrossRef]
- Díez, C.M.; Moral, J.; Cabello, D.; Morello, P.; Rallo, L.; Barranco, D. Cultivar and tree density as key factors in the long-term performance of super high-density olive orchards. Front. Plant Sci. 2016, 7, 1226. [Google Scholar] [CrossRef] [PubMed]
- Dewi, C.; Chen, R.-C. Decision making based on IoT data collection for precision agriculture. Stud. Comput. Intell. 2019, 830, 31–42. [Google Scholar]
- Comba, L.; Biglia, A.; Ricauda Aimonino, D.; Gay, P. Unsupervised detection of vineyards by 3D point-cloud UAV photogrammetry for precision agriculture. Comput. Electron. Agric. 2018, 155, 84–95. [Google Scholar] [CrossRef]
- De Castro, A.I.; Jiménez-Brenes, F.M.; Torres-Sánchez, J.; Peña, J.M.; Borra-Serrano, I.; López-Granados, F. 3-D characterization of vineyards using a novel UAV imagery-based OBIA procedure for precision viticulture applications. Remote Sens. 2018, 10, 584. [Google Scholar] [CrossRef]
- Castrignanò, A.; Buttafuoco, G.; Quarto, R.; Parisi, D.; ViscarraRossel, R.A.; Terribile, F.; Langella, G.; Venezia, A. A geostatistical sensor data fusion approach for delineating homogeneous management zones in Precision Agriculture. CATENA 2018, 167, 293–304. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Camino, C.; Beck, P.S.A.; Calderon, R.; Hornero, A.; Hernández-Clemente, R.; Kattenborn, T.; Montes-Borrego, M.; Susca, L.; Morelli, M.; et al. Previsual symptoms of xylellafastidiosa infection revealed in spectral plant-trait alterations. Nat. Plants 2018, 4, 432–439. [Google Scholar] [CrossRef]
- Gavioli, A.; de Souza, E.G.; Bazzi, C.L.; Schenatto, K.; Betzek, N.M. Identification of management zones in precision agriculture: An evaluation of alternative cluster analysis methods. Biosyst. Eng. 2019, 181, 86–102. [Google Scholar] [CrossRef]
- Ezenne, G.I.; Jupp, L.; Mantel, S.K.; Tanner, J.L. Current and potential capabilities of UAS for crop water productivity in precision agriculture. Agric. Water Manag. 2019, 218, 158–164. [Google Scholar] [CrossRef]
- Malambo, L.; Popescu, S.C.; Murray, S.C.; Putman, E.; Pugh, N.A.; Horne, D.W.; Richardson, G.; Sheridan, R.; Rooney, W.L.; Avant, R.; et al. Multitemporal field-based plant height estimation using 3D point clouds generated from small unmanned aerial systems high-resolution imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 31–42. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; Serrano, N.; Arquero, O.; Fernández-Escobar, R.; Peña, J.M. Characterizing olive tree geometric features using unmanned aerial vehicle (UAV) images. In Proceedings of the International Conference for Olive Tree and Olive Products, Amman, Jordan, 3–6 November 2014. [Google Scholar]
- Torres-Sánchez, J.; López-Granados, F.; Peña, J.M. An automatic objectbased method for optimal thresholding of remotely-sensed data: Application for vegetation detection in herbaceous crops from UAV images. Comput. Electron. Agric. 2015, 114, 43–52. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; de Castro, A.I.; Peña, J.M.; Jiménez-Brenes, F.M.; Arquero, O.; Lovera, M.; López-Granados, F. Mapping the 3D structure of almond trees using UAV acquired photogrammetric point clouds and object-based image analysis. Biosyst. Eng. 2018, 176, 172–184. [Google Scholar] [CrossRef]
- Jiménez-Brenes, F.M.; López-Granados, F.; De Castro, A.I.; Torres-Sánchez, J.; Serrano, N.; Peña, J.M. Quantifying pruning impacts on olive tree architecture and annual canopy growth by using UAV-based 3D modelling. Plant Methods 2017, 13, 55. [Google Scholar] [CrossRef] [PubMed]
- Peña, J.M.; De Castro, A.I.; Torres-Sánchez, J.; Andújar, D.; San Martín, C.; Dorado, J.; Fernández-Quintanilla, C.; López-Granados, F. Estimating tree height and biomass of a poplar plantation with image-based UAV technology. AIMS Agric. Food 2018, 3, 313–326. [Google Scholar] [CrossRef]
- Whalley, J.L.; Shanmuganathan, S. Applications of image processing in viticulture: A review. In Triple S: A New Tool for Soybean High Throughput Phenotyping from Uas-Based Multispectral Imagery (2013) SPIE Defense + Commercial Sensing, Proceedings of the 20th International Congress on Modelling and Simulation, Adelaide, Australia, 1–6 December 2013; Herrero-Huerta, M., Govindarajan, S., Cherkauer, K., Rainey, K., Eds.; International Society for Optics and Photonics. SPIE: Baltimore, MD, USA, 2019; pp. 1007–1020. [Google Scholar]
- Ampatzidis, Y.; Partel, V. UAV-based high throughput phenotyping in citrus utilizing multispectral imaging and artificial intelligence. Remote Sens. 2019, 11, 410. [Google Scholar] [CrossRef]
- Sanz, R.; Llorens, J.; Escolà, A.; Arnó, J.; Planas, S.; Román, C.; Rosell-Polo, J.R. LIDAR and non-LIDAR-based canopy parameters to estimate the leaf area in fruit trees and vineyard. Agric. For. Meteorol. 2018, 260–261, 229–239. [Google Scholar] [CrossRef]
- Herrero-Huerta, M.; Felipe-García, B.; Belmar-Lizarán, S.; Hernández-López, D.; Rodríguez-Gonzálvez, P.; González-Aguilera, D. Dense canopy height model from a low-cost photogrammetric platform and LiDAR data. Trees Struct. Funct. 2016, 30, 1287–1301. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovskỳ, Z.; Turner, D.; Vopěnka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- González-Jaramillo, V.; Fries, A.; Bendix, J. AGB estimation in a tropical mountain forest (TMF) by means of RGB and multispectral images using an unmanned aerial vehicle (UAV). Remote Sens. 2019, 11, 1413. [Google Scholar] [CrossRef]
- Codis, S.; Carra, M.; Delpuech, X.; Montegano, P.; Nicot, H.; Ruelle, B.; Ribeyrolles, X.; Savajols, B.; Vergès, A.; Naud, O. Dataset of spray deposit distribution in vine canopy for two contrasted performance sprayers during a vegetative cycle associated with crop indicators (LWA and TRV). Data Br. 2018, 18, 415–421. [Google Scholar] [CrossRef] [PubMed]
- Herrero-Huerta, M.; Rainey, K.M. High throughput phenotyping of physiological growth dynamics from uas-based 3D modeling in soybean. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2019, 42, 357–361. [Google Scholar] [CrossRef]
- Camposeo, S.; Godini, A. Preliminary observations about the performance of 13 varieties according to the super high density oliveculture training system in Apulia (southern Italy). Adv. Hortic. Sci. 2010, 24, 16–20. [Google Scholar]
- Anifantis, A.S.; Pascuzzi, S.; Scarascia-Mugnozza, G. Geothermal source heat pump performance for a greenhouse heating system: An experimental study. J. Agric. Eng. 2016, 47, 164–170. [Google Scholar] [CrossRef]
- Anifantis, A.S. Performance assessment of photovoltaic, ground source heat pump and hydrogen heat generator in a stand-alone systems for greenhouse heating. Chem. Eng. Trans. 2017, 58, 511–516. [Google Scholar]
- Russo, G.; Verdiani, G.; Anifantis, A.S. Re-use of agricultural biomass for nurseries using proximity composting. Contemp. Eng. Sci. 2016, 9, 1151–1182. [Google Scholar] [CrossRef]
- Bulgakov, V.; Pascuzzi, S.; Santoro, F.; Anifantis, A.S. Mathematical Model of the Plane-Parallel Movement of the Self-Propelled Root-Harvesting Machine. Sustainability 2018, 10, 378. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Row | Cultivar | TRV1 (m3) | N | M | TRV*avg (m3) | TRV2 (m3) | C (m) | H (m) | R (m) | A (m2) | TRV3 (m3) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | Arbequina I | 241 | 37 | 1 | 5.95 | 214 | 1.75 | 2.12 | 4 | 272 | 252 |
| 2 | Fs-17 | 217 | 38 | 2 | 6.64 | 239 | 1.90 | 2.37 | 4 | 236 | 266 |
| 3 | Koroneiki III | 304 | 38 | 0 | 8.42 | 320 | 2.30 | 2.64 | 4 | 236 | 358 |
| 4 | Arbosana III | 163 | 38 | 1 | 5.03 | 186 | 1.45 | 2.40 | 4 | 236 | 205 |
| 5 | I/77 | 244 | 37 | 5 | 7.34 | 235 | 1.77 | 2.80 | 4 | 236 | 292 |
| 6 | ArbosanaI | 182 | 39 | 1 | 5.17 | 197 | 1.47 | 2.25 | 4 | 272 | 225 |
| 7 | Koroneiki I | 285 | 38 | 0 | 7.90 | 300 | 1.70 | 2.86 | 4 | 272 | 331 |
| 8 | Don Carlo | 218 | 37 | 2 | 6.69 | 234 | 1.70 | 2.74 | 4 | 236 | 275 |
| 9 | Maurino | 321 | 37 | 0 | 8.20 | 304 | 1.90 | 3.00 | 4 | 236 | 336 |
| 10 | Arbequina III | 270 | 38 | 1 | 6.85 | 253 | 1.80 | 2.70 | 4 | 236 | 287 |
| 11 | Leccino | 272 | 37 | 1 | 7.91 | 285 | 1.95 | 2.82 | 4 | 236 | 324 |
| 12 | Coratina I | 275 | 38 | 3 | 9.20 | 322 | 1.90 | 2.82 | 4 | 272 | 364 |
| 13 | Cima di Bitonto | 237 | 39 | 9 | 8.29 | 249 | 1.83 | 2.87 | 4 | 272 | 357 |
| 14 | Arbequina II | 200 | 37 | 0 | 6.40 | 237 | 1.45 | 2.85 | 4 | 236 | 244 |
| 15 | Peranzana | 216 | 38 | 3 | 7.67 | 269 | 1.40 | 2.96 | 4 | 236 | 244 |
| 16 | Nociara | 228 | 38 | 1 | 7.01 | 259 | 1.62 | 3.03 | 4 | 236 | 290 |
| 17 | Koroneiki II | 186 | 36 | 2 | 8.16 | 277 | 1.30 | 2.94 | 4 | 236 | 225 |
| 18 | Frantoio I | 209 | 36 | 8 | 9.02 | 262 | 1.65 | 2.95 | 4 | 272 | 331 |
| 19 | Carolea | 153 | 38 | 10 | 7.11 | 164 | 1.50 | 2.27 | 4 | 272 | 232 |
| 20 | Arbosana II | 96 | 37 | 2 | 4.27 | 158 | 0.90 | 2.27 | 4 | 236 | 121 |
| 21 | Coratina II | 179 | 38 | 2 | 6.90 | 248 | 1.30 | 2.95 | 4 | 236 | 226 |
| 22 | Frantoio II | 286 | 38 | 3 | 8.45 | 296 | 2.04 | 2.96 | 4 | 236 | 356 |
| 23 | Urano II | 243 | 37 | 2 | 6.62 | 232 | 1.82 | 2.52 | 4 | 236 | 271 |
| 24 | Urano | 210 | 38 | 4 | 6.76 | 230 | 1.79 | 2.33 | 4 | 272 | 284 |
| TOTAL | 5435 | 5970 | 6696 |
| TRV1 | TRV2 | TRV3 | |
|---|---|---|---|
| Mean | 226 | 249 | 279 |
| Median | 223 | 249 | 280 |
| Standard deviation | 52 | 45 | 59 |
| Skewness | −0.38 | −0.30 | −0.55 |
| Kurtosis | 0.34 | −0.26 | 0.54 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Anifantis, A.S.; Camposeo, S.; Vivaldi, G.A.; Santoro, F.; Pascuzzi, S. Comparison of UAV Photogrammetry and 3D Modeling Techniques with Other Currently Used Methods for Estimation of the Tree Row Volume of a Super-High-Density Olive Orchard. Agriculture 2019, 9, 233. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture9110233
Anifantis AS, Camposeo S, Vivaldi GA, Santoro F, Pascuzzi S. Comparison of UAV Photogrammetry and 3D Modeling Techniques with Other Currently Used Methods for Estimation of the Tree Row Volume of a Super-High-Density Olive Orchard. Agriculture. 2019; 9(11):233. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture9110233
Chicago/Turabian StyleAnifantis, Alexandros Sotirios, Salvatore Camposeo, Gaetano Alessandro Vivaldi, Francesco Santoro, and Simone Pascuzzi. 2019. "Comparison of UAV Photogrammetry and 3D Modeling Techniques with Other Currently Used Methods for Estimation of the Tree Row Volume of a Super-High-Density Olive Orchard" Agriculture 9, no. 11: 233. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture9110233