2.1. Ship Resistance and Propulsion Characteristics
The Kriso container ship (KCS) is used as a case study for assessing the impact of speed reduction on fuel consumption and CO
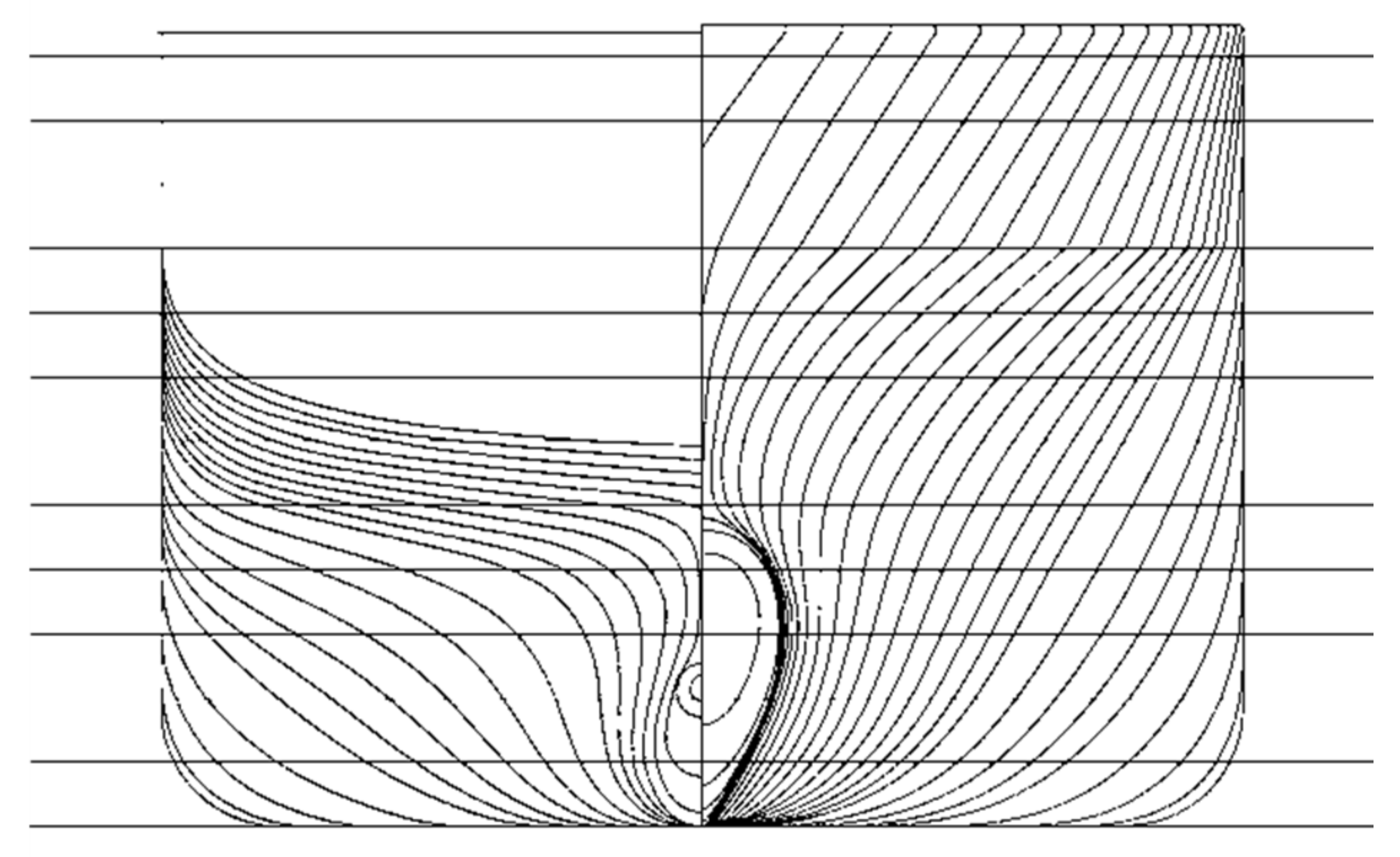
2 emissions. The design speed of KCS corresponds to 22 kn (knots) and the slow steaming speeds range from 18 to 21 kn. The body plan of KCS is presented in
Figure 1, and the main particulars are given in
Table 1. KCS represents a typical container ship and a benchmark commonly used in numerous studies related to computational fluid dynamics (CFD) [
21,
22,
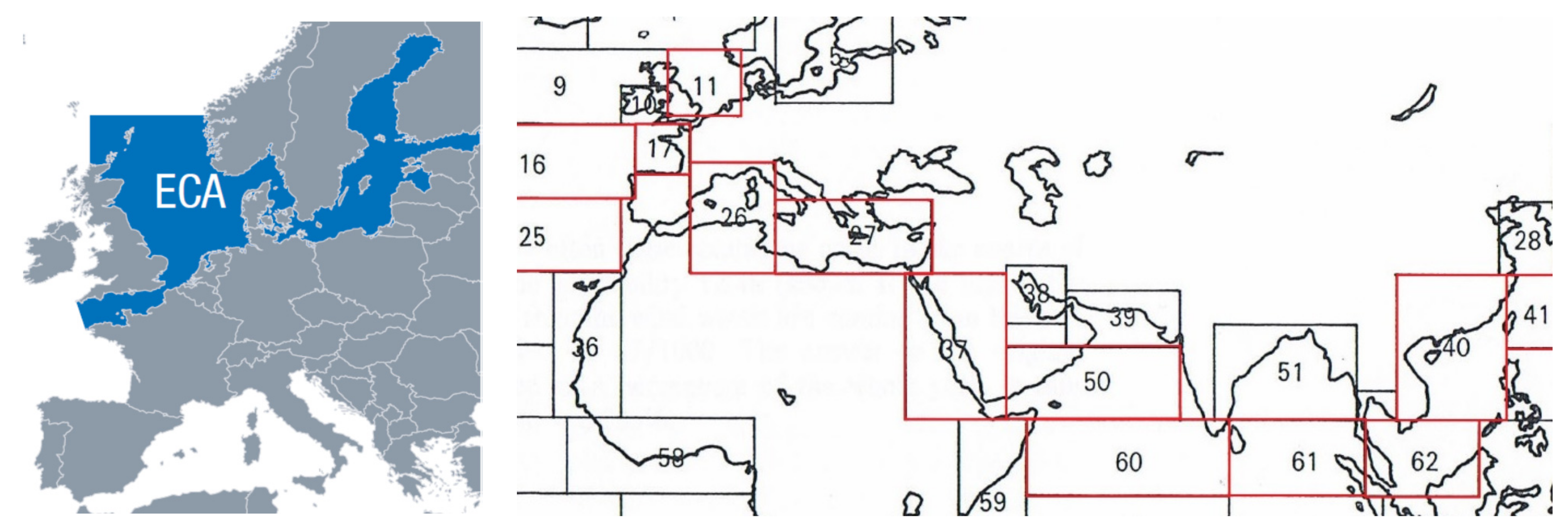
23]. The container ship sailing route connects China (Shanghai port,
= 31.303° N,
= 121.667° E) and Germany (Hamburg port,
= 54.542° N,
= 9.915° E) passes through the Mediterranean Sea and is selected for the case study,
Figure 2.
Numerical simulations of resistance and self-propulsion tests are carried out utilizing STAR-CCM+. The total resistance of a ship in calm water at the design and slow steaming speeds is obtained in resistance tests, while ship propulsion characteristics are obtained in self-propulsion tests. The governing equations of the applied mathematical model are the Reynolds averaged Navier–Stokes (RANS) equations and the averaged continuity equation [
24]:
where
is the fluid density,
is the averaged Cartesian components of the velocity vector,
is the Reynolds stress tensor,
is the mean pressure, and
is the mean viscous stress tensor.
To close the set of Equations (1) and (2), the
shear stress transport turbulence model is applied. The size of the computational domains and the boundary conditions applied on the domain boundaries in the numerical simulations of resistance and self-propulsion tests are the same as is [
19], while details on the discretization schemes, mesh refinements, time steps, and stopping criteria are explained in [
25,
26].
Ship total resistance and propulsion characteristics in calm water are validated against the experimental data available in the literature, and the highest relative deviation is equal to 4.58% for relative rotative efficiency [
26]. Ship-added resistance in regular head waves is obtained by the boundary integral equation method (BIEM) [
27], and the highest relative deviation from the experimental data is equal to 8.6% [
11]. The added resistance for sea states with the highest probability of occurrence on the analyzed sailing route [
28] is obtained by means of the spectral analysis using the Bretschneider sea spectrum:
where
is the significant wave height and
is the zero-crossing period. The term
corresponds to zero-crossing frequency. The areas of the investigated sailing route are shown in
Figure 2, and sea states with the highest probability of occurrence are presented in
Table 2.
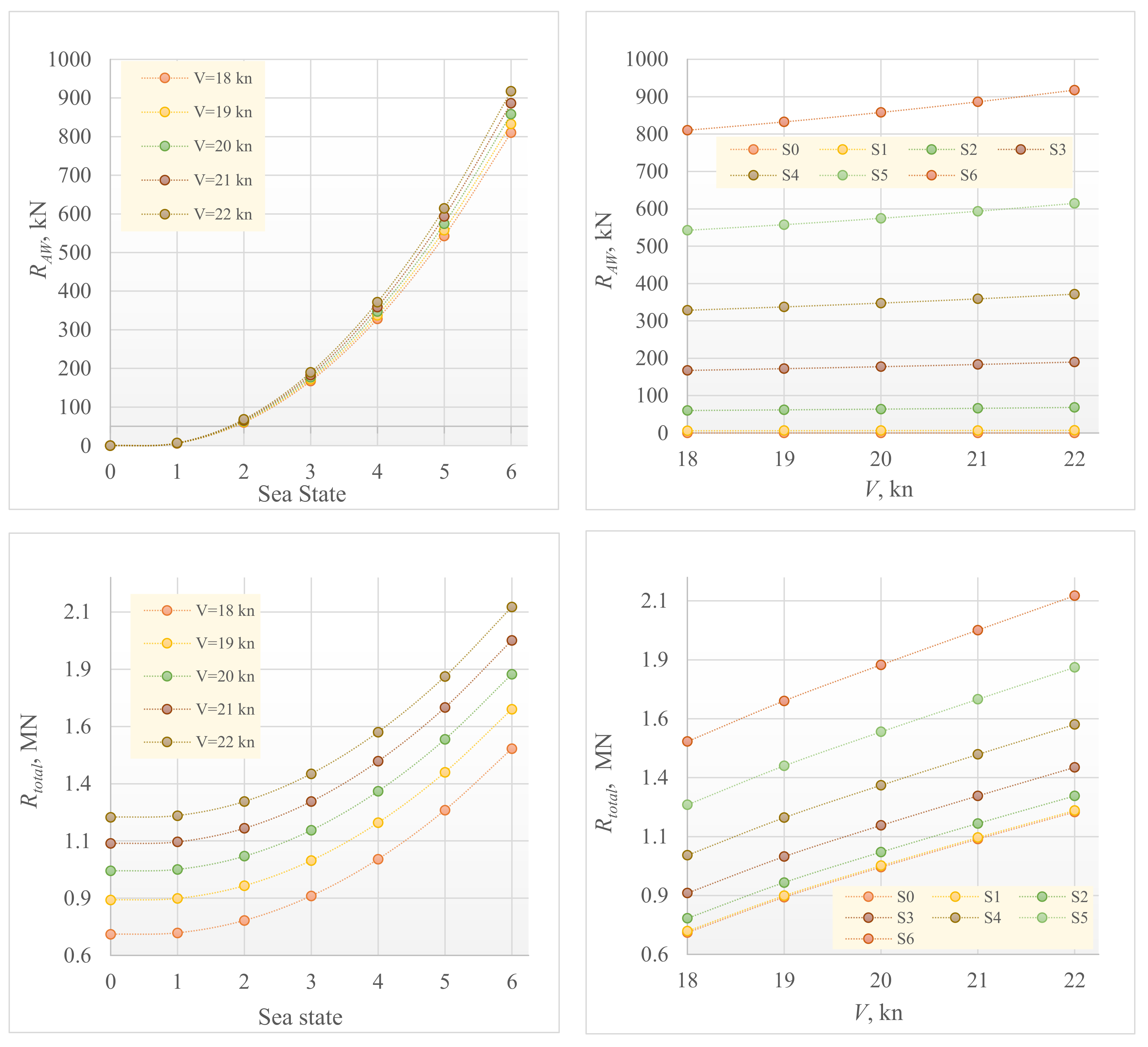
The total resistance in waves is calculated as the sum of calm water resistance
and added resistance in waves
, as follows:
The thrust deduction fraction , wake fraction , and relative rotative efficiency are obtained in the numerical simulations of the self-propulsion tests in calm water and are assumed to be constant at a certain ship speed for all analyzed sea states.
Based on the thrust deduction fraction depending on ship speed,
, the required thrust in waves is determined by the following equation:
The required thrust depending on the thrust coefficient
is defined as follows:
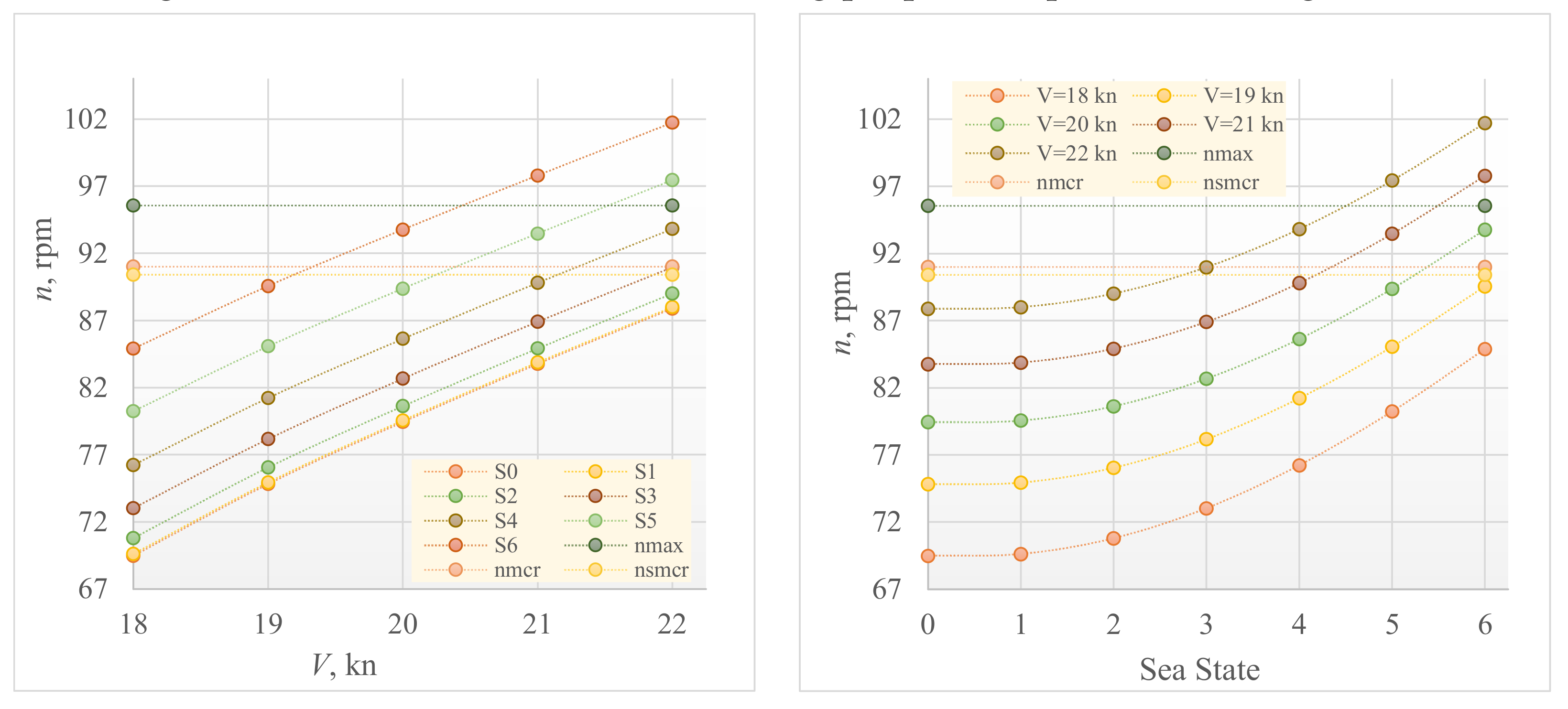
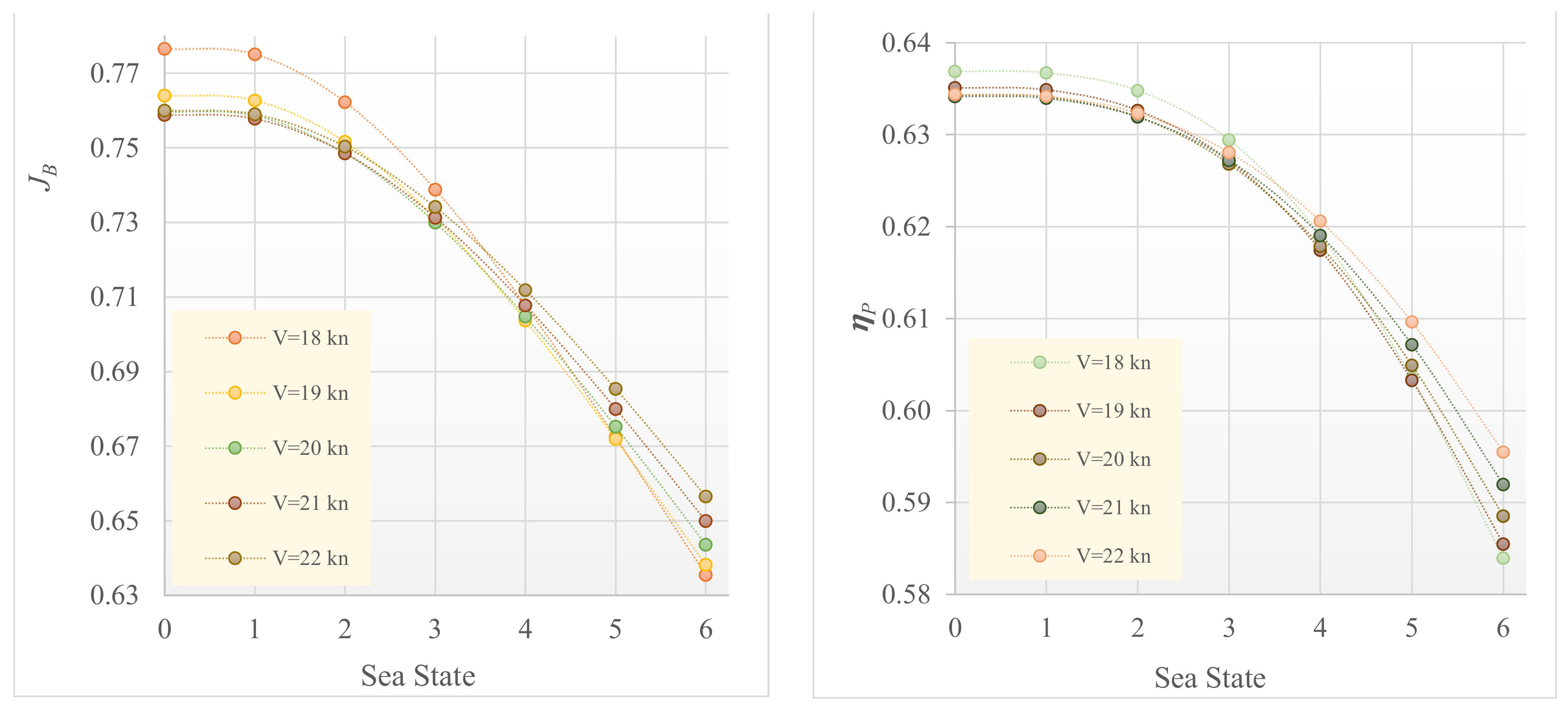
The balancing rate of revolution
is calculated for each ship speed and sea state, i.e.,
. Based on the calculated
, other propulsion parameters, such as the propeller advance ratio
and torque coefficient
are determined, as well as propeller efficiency
. Finally, the balancing value of the engine torque, taking into account the propeller shafting efficiency
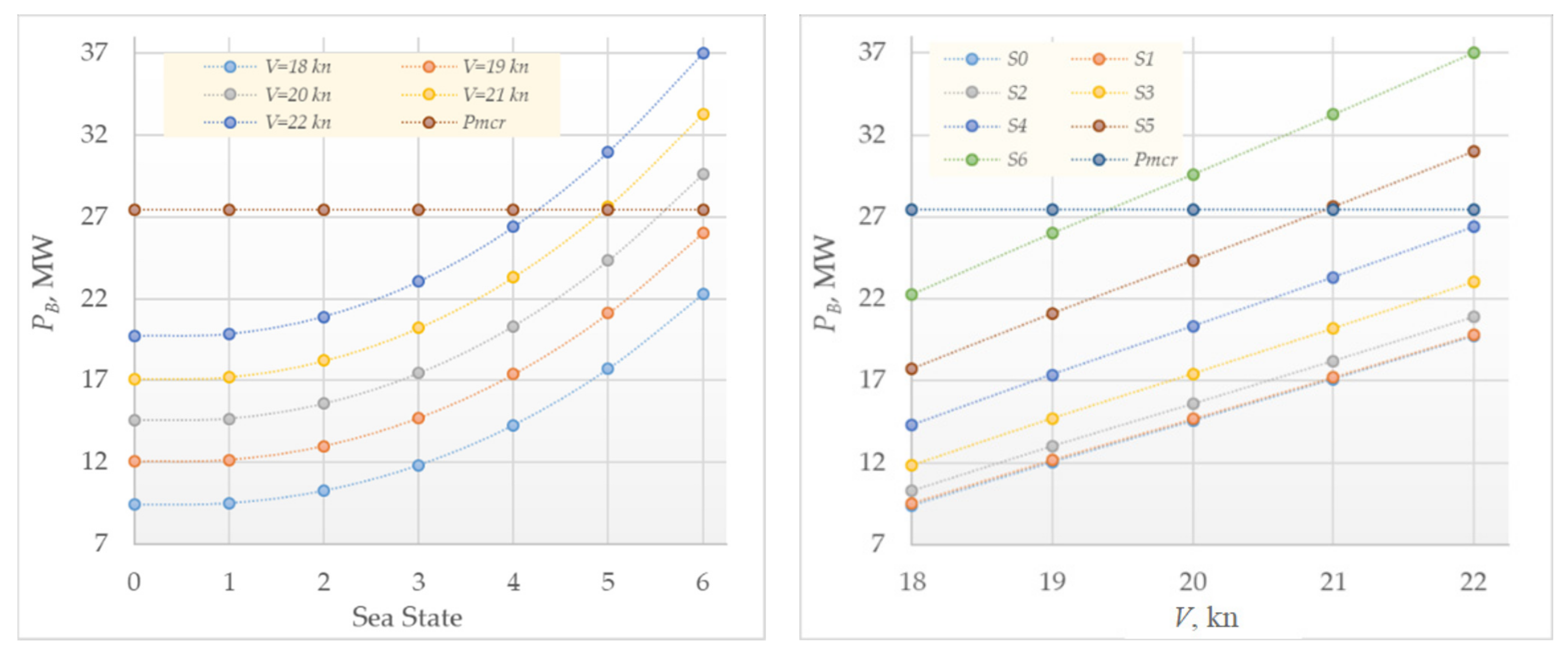
, and the balancing value of brake power are calculated by the following expressions, respectively:
where
and
are overall propulsion efficiency and hull efficiency, respectively.
2.2. Selection Procedure for the Main DF Engine Complying with IMO Regulations
Considering the decarbonization trends in maritime transport, the DF engine is currently the most favorable choice. According to MAN propulsion DF engine project guide program [
29,
30], these engines can run in three fueled modes: FO only; mainly NG with a very small share of the pilot fuel oil (PFO), i.e.,
of the overall fuel energy income; and fuel-sharing mode (FSM), also referred to as specified dual fuel (SDF) mode, where the ratio between PFO and NG can be selected according to preset values.
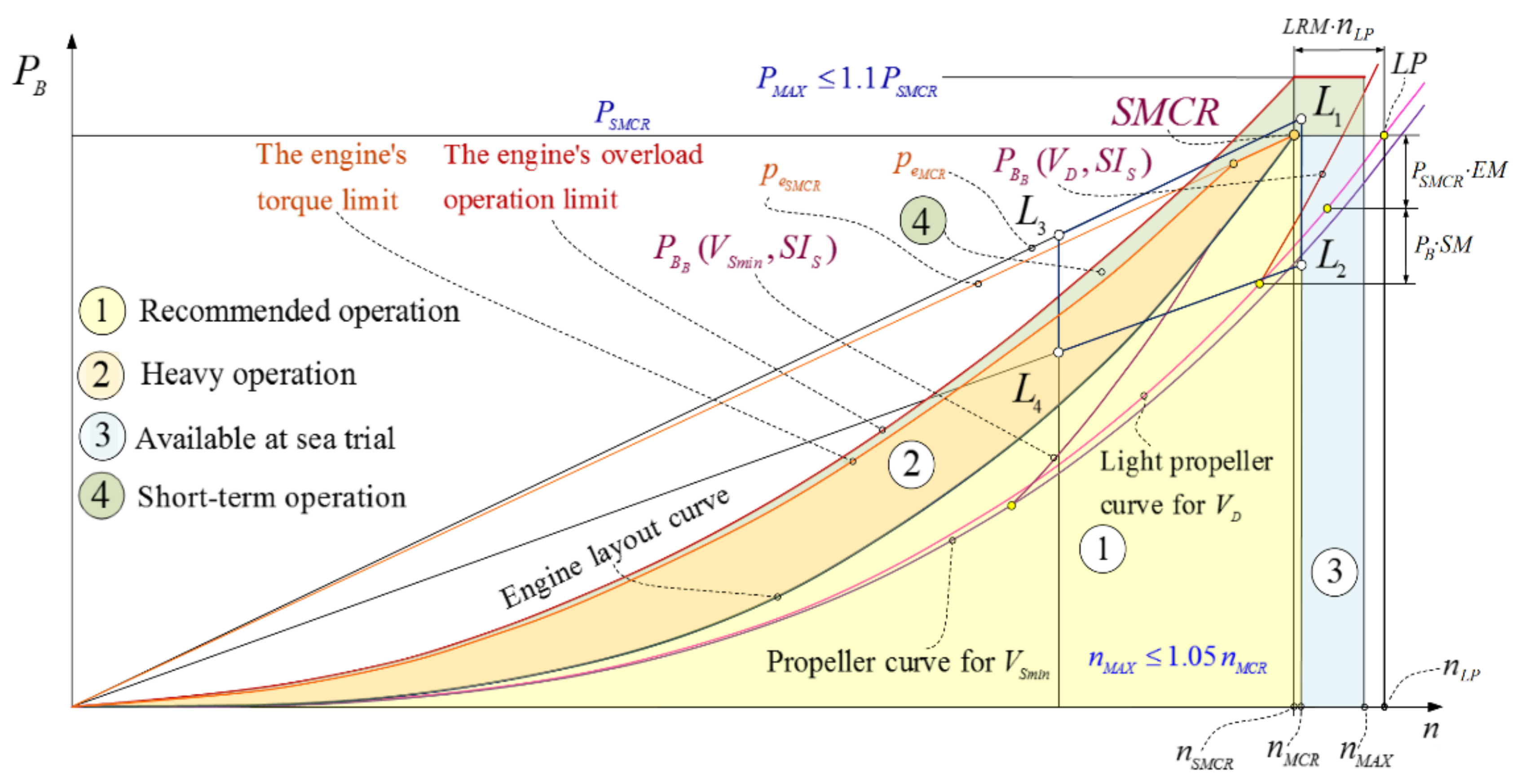
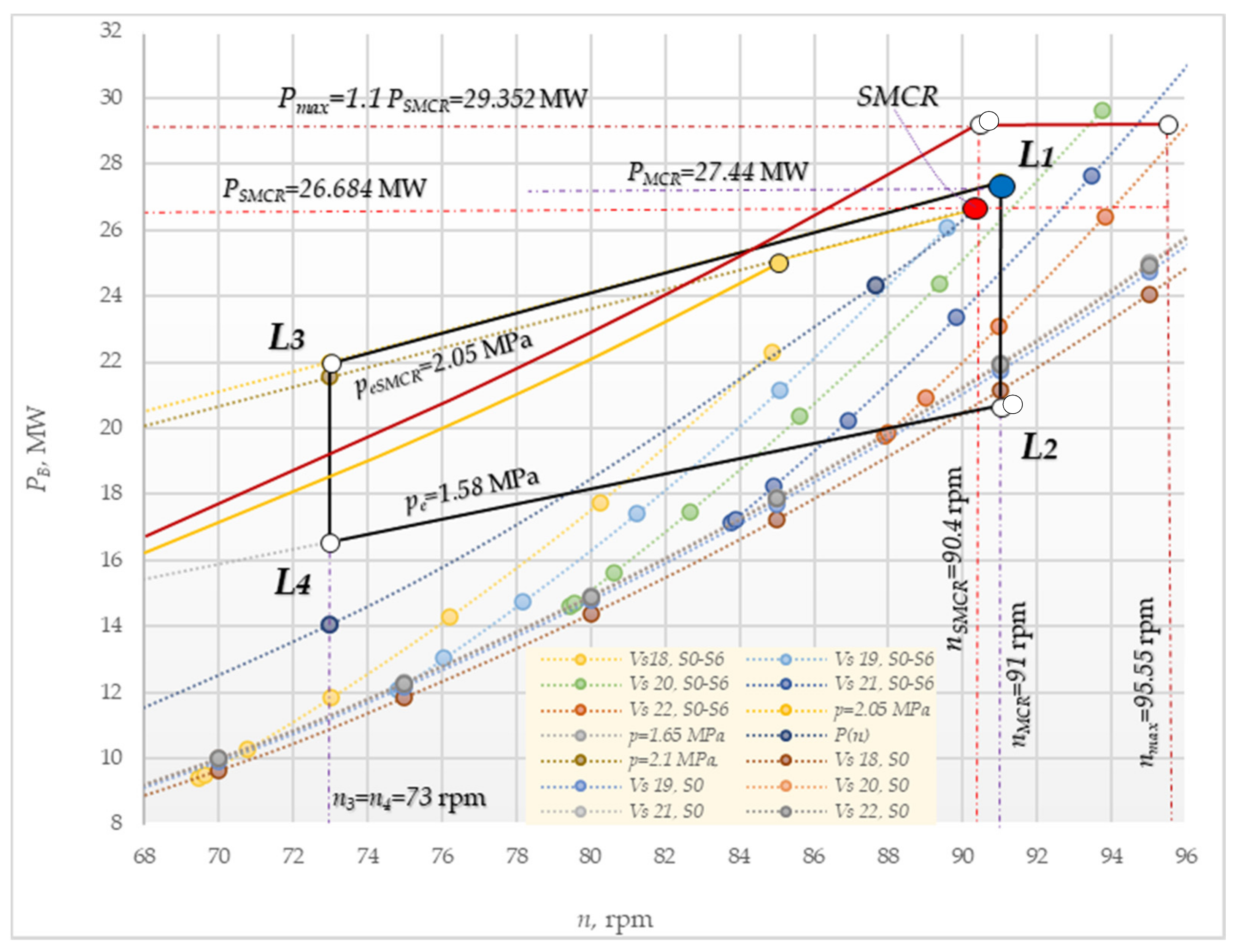
The selection DF engine is based on the fact that SMCR (specified maximum continuous rating) must be located within the engine layout diagram (inside of the quadrangle defined by points L
1, L
2, L
3, and L
4),
Figure 3. For the SMCR, corresponding break power
and the rate of revolution
are calculated as follows:
where
and
are sea and engine margine, respectively, while
is light running margine.
Further,
is the rate of revolution at the light propeller (LP) curve that is calculated for
as follows:
Since SMCR must be within the engine layout diagram,
must be greater than:
Because part of the analyzed sailing route passes through ECAs (emission control area),
Figure 2, the selected DF engine complies with IMO’s Tier II and Tier III (for ECAs) regulations. It should be noted that Tier II refers to non-ECAs (in the rest of the paper moderate ECAs, MECAs), where according SOx rules [
31] mass sulfur fraction in FO and PFO must be
, while Tier III refers to ECAs with mass sulfur fraction
. Consequently, inside ECAs DF engines must be fueled by the ultra low sulfur fuel oil (ULSFO) with
, and outside ECAs (MECAs) by the very low sulfur fuel oil (VLSFO) with
. In general, both ULSFO and VLSFO can be either marine gas oil (MGO), distillate (DM), or residual (RM) marine fuels.
On the other hand, according to the NOX rules, for ECAs Tier III requirements must be applied for NOx reductions on two-stroke DF engines, which can be fulfilled by two alternative methods: EGR (exhaust gas recirculation) and SCR (selective catalytic reduction). Both alternative methods have two emission-cycle operating modes: Tier II for operation outside NECAs (NOX ECAs) and Tier III for operation inside NECAs.
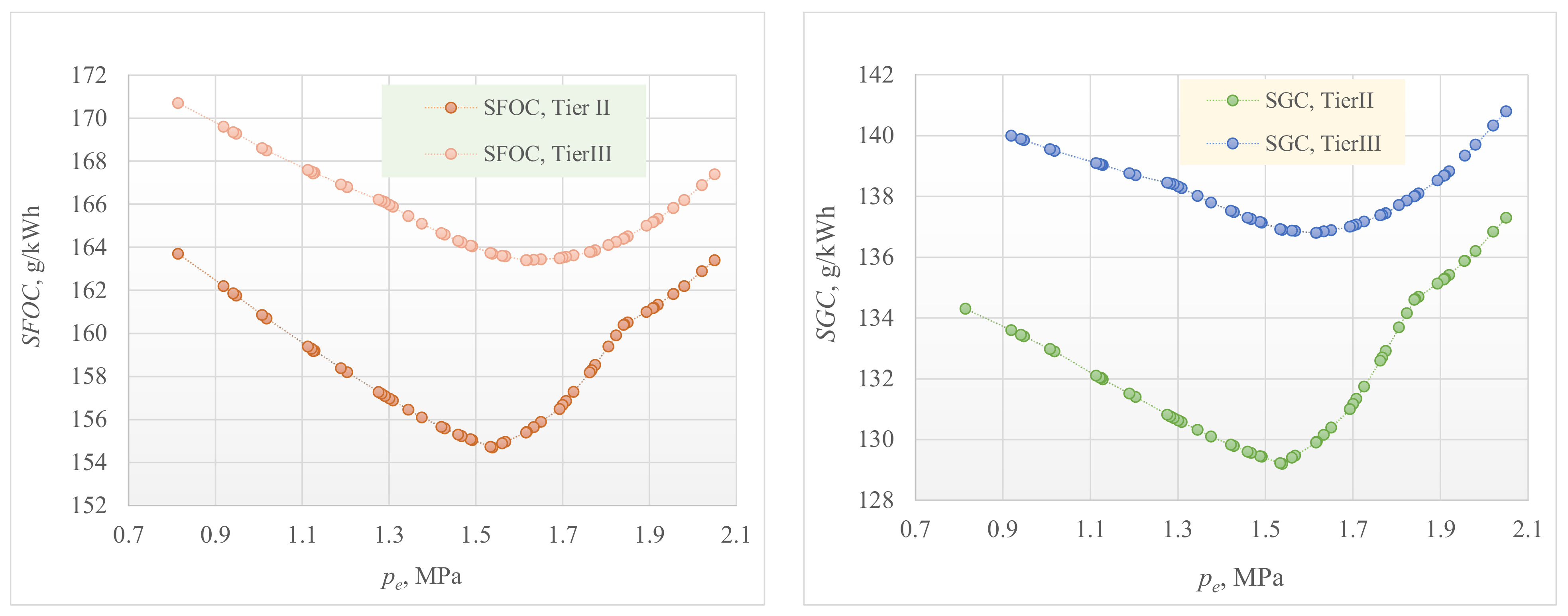
For sailing at the design and slow steaming speeds, with the determined SMCR of the selected engine, four optimization variants, concerning the reduction in the specific fuel oil consumption (SFOC) and consequently CO2 emissions, have been conducted using the MAN computerized engine application system (CEAS). These variants include FO and NG modes complying with Tier II and Tier III regulations (TR-Tier Regulations). In the remaining part of the paper, Tier II and Tier III are indexed by II and III, respectively.
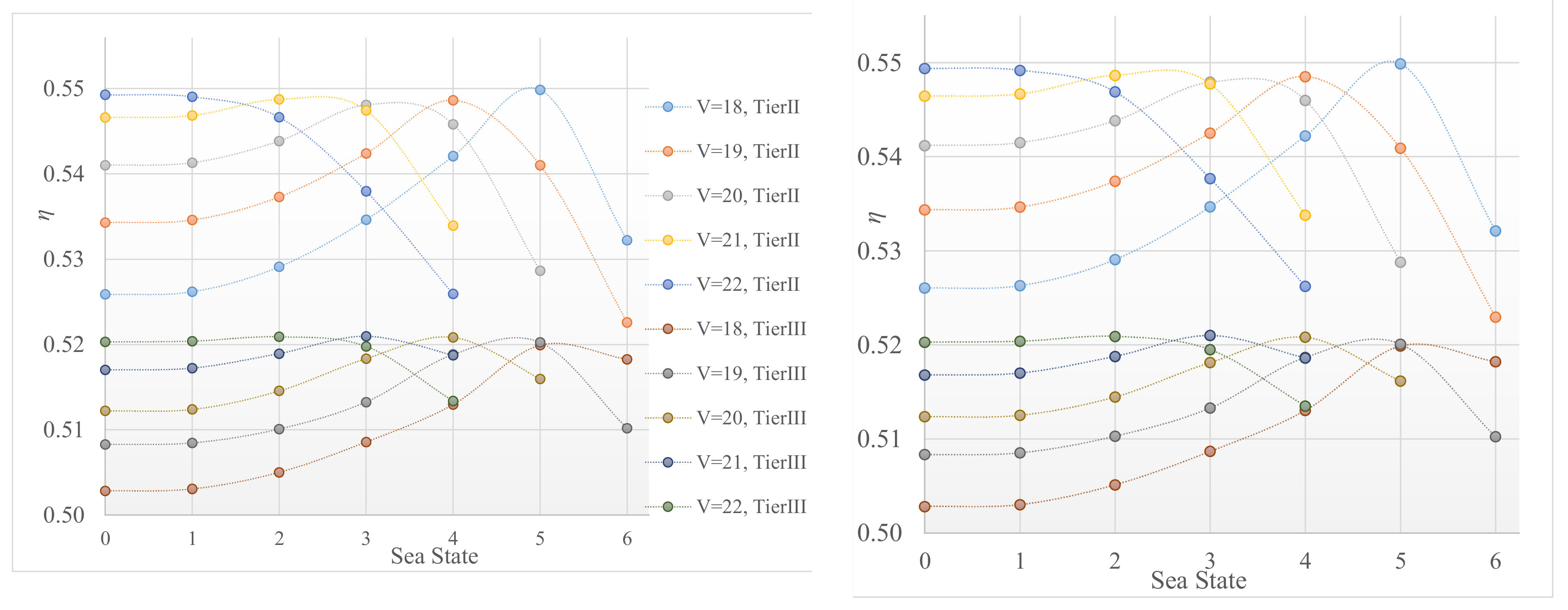
The energy efficiencies for selected fueling mode (FM), depending on the specific fuel consumption at specified TR
, are determined for NG and FO modes as follows:
where
,
, and
are specific consumptions of FO, PFO, and NG in a TR mode, respectively, and
and
are lower heating values for FO and NG, respectively.
Based on the
values for the operating scenarios obtained using the CEAS, the fuel consumptions (FC) such that
FOC (FO consumption),
PFOC (pilot FO consumption),
NGC (NG consumption), and
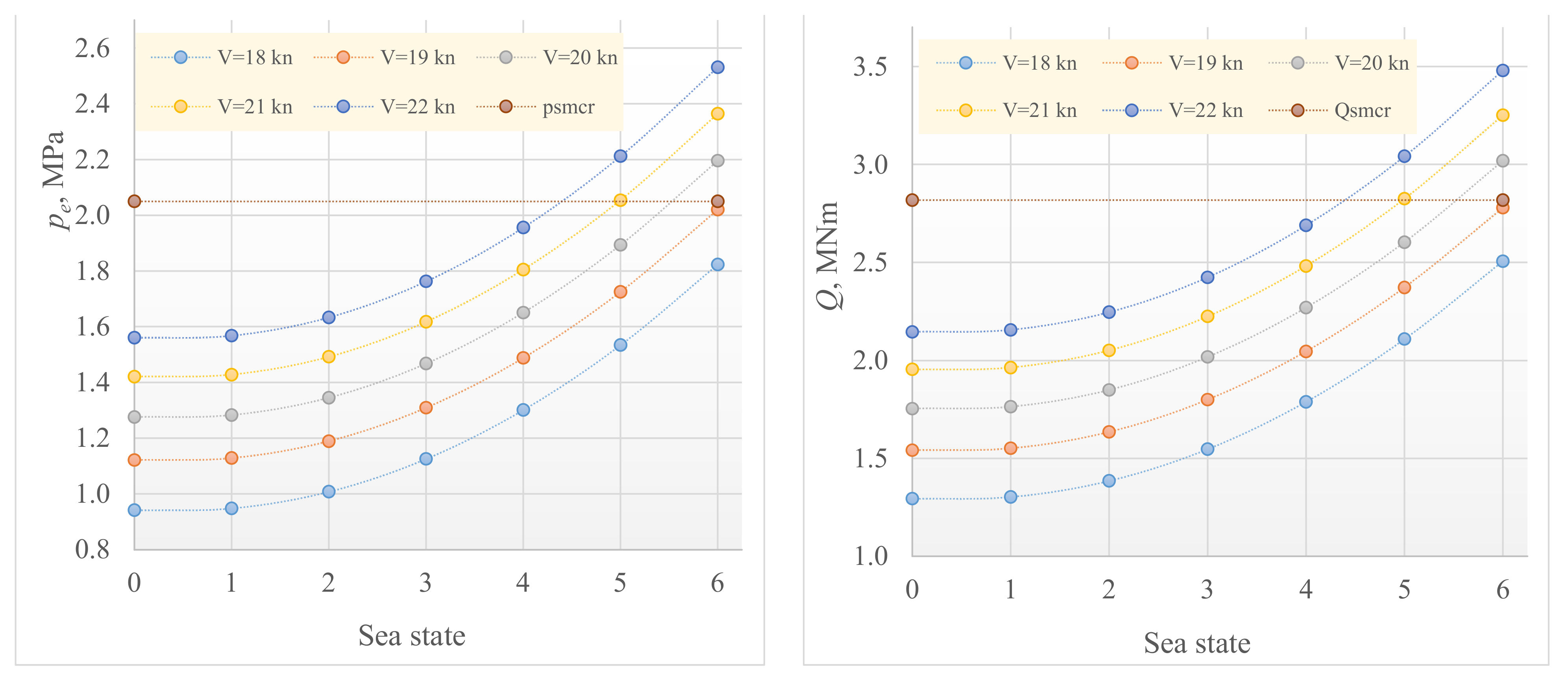
CDE (carbon dioxide emission), depending on the both balancing mean effective pressure
and brake power
, can be calculated using the following equations:
where
represents stoichiometric factors depending on the selected FM at specified TR.
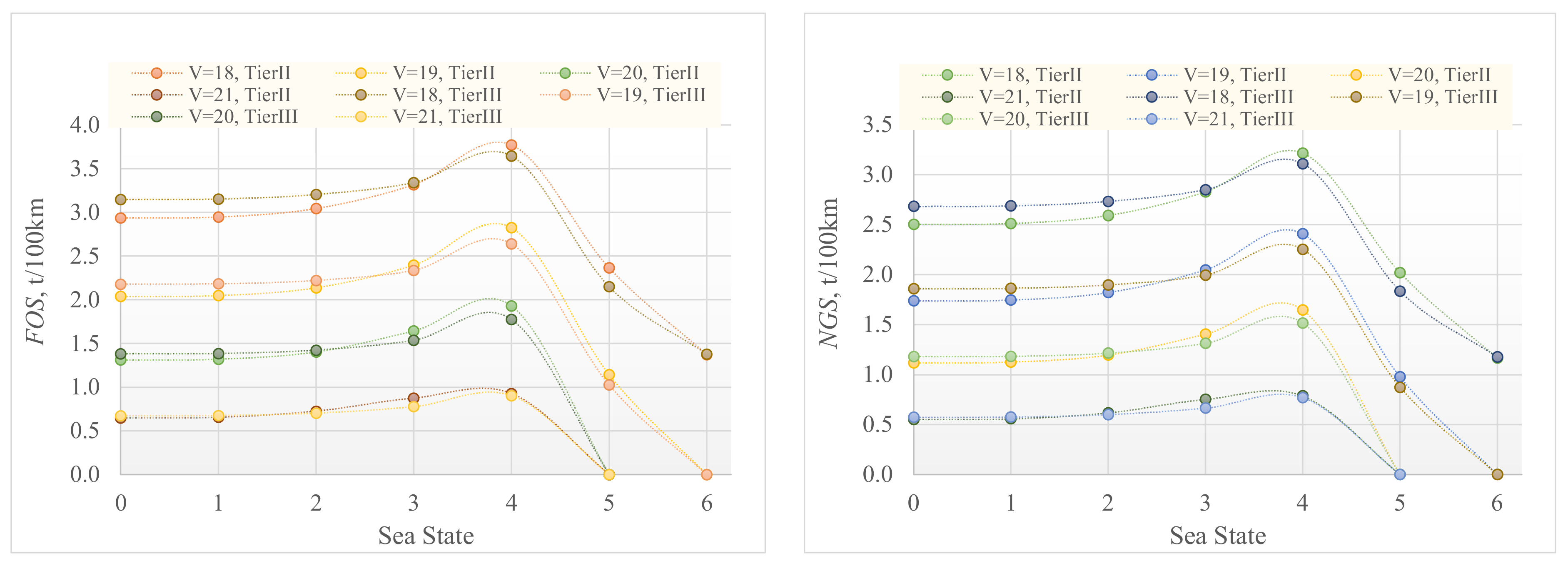
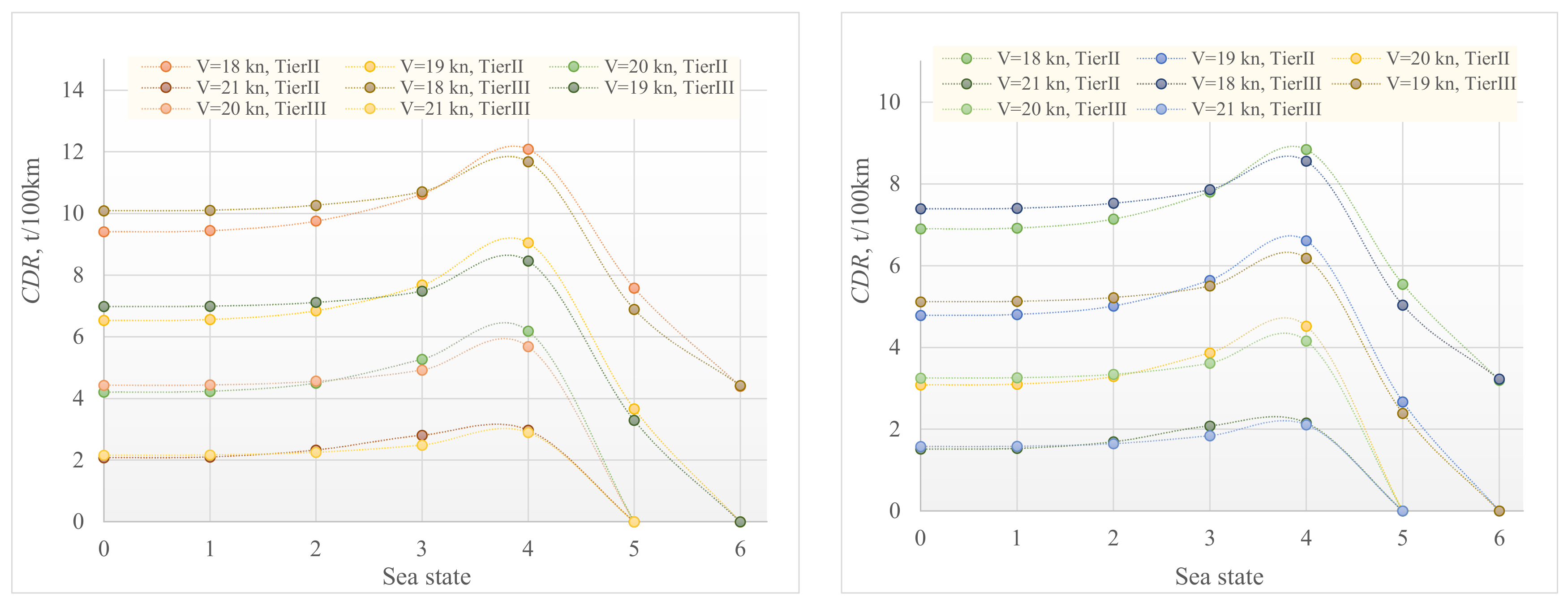
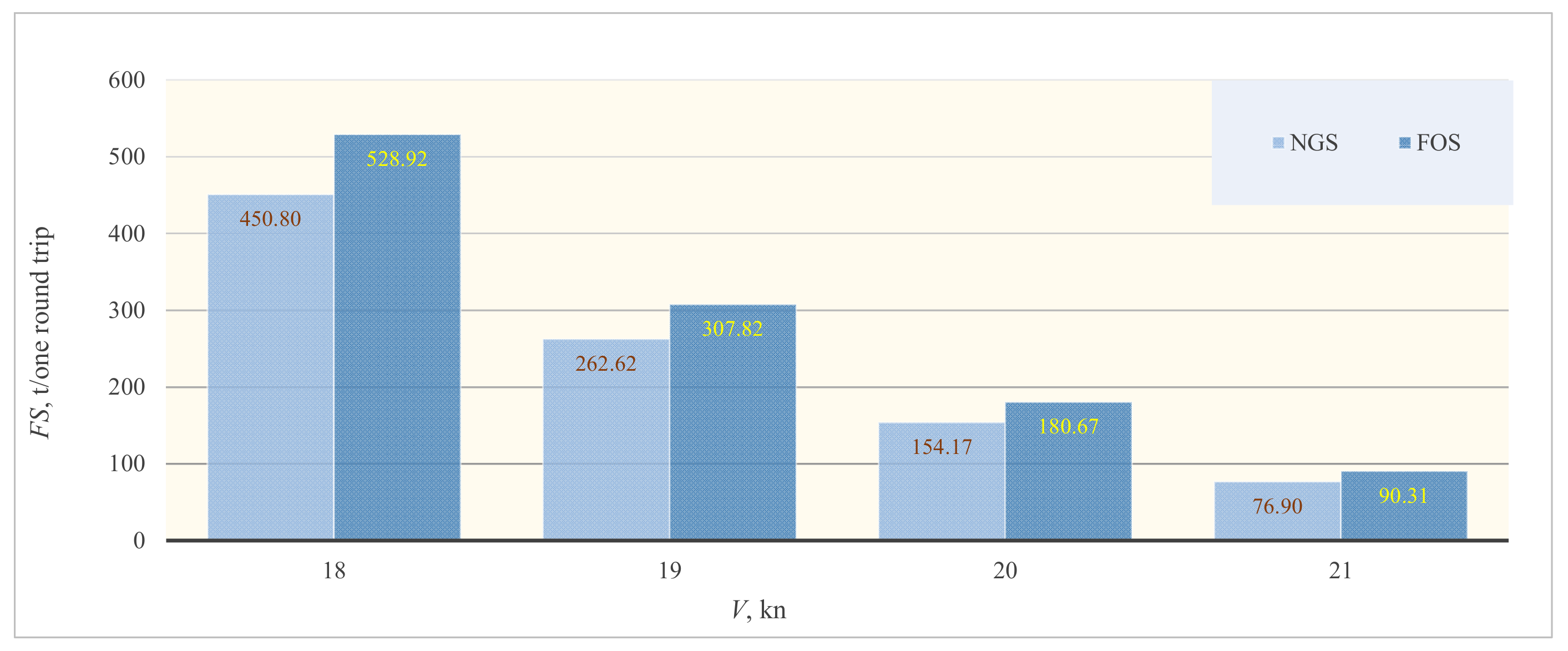
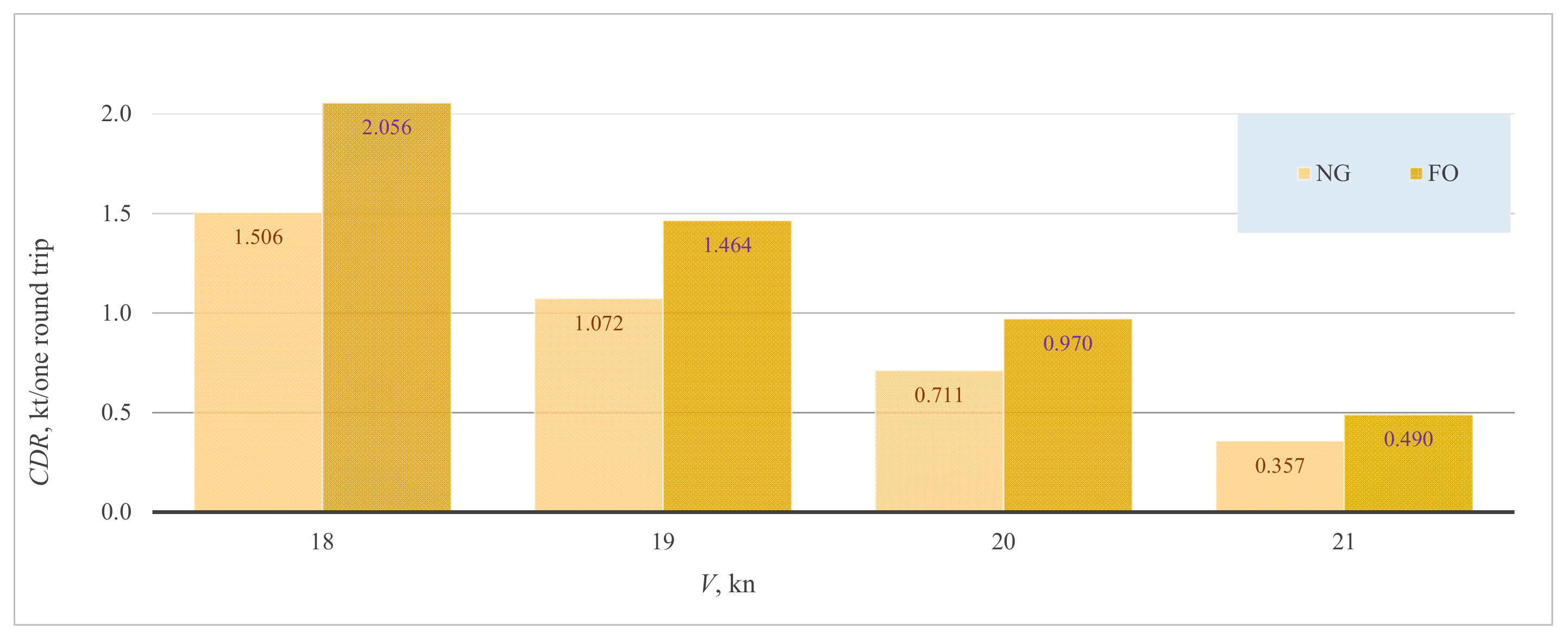
2.3. Fuel Savings and CO2 Emission Reduction
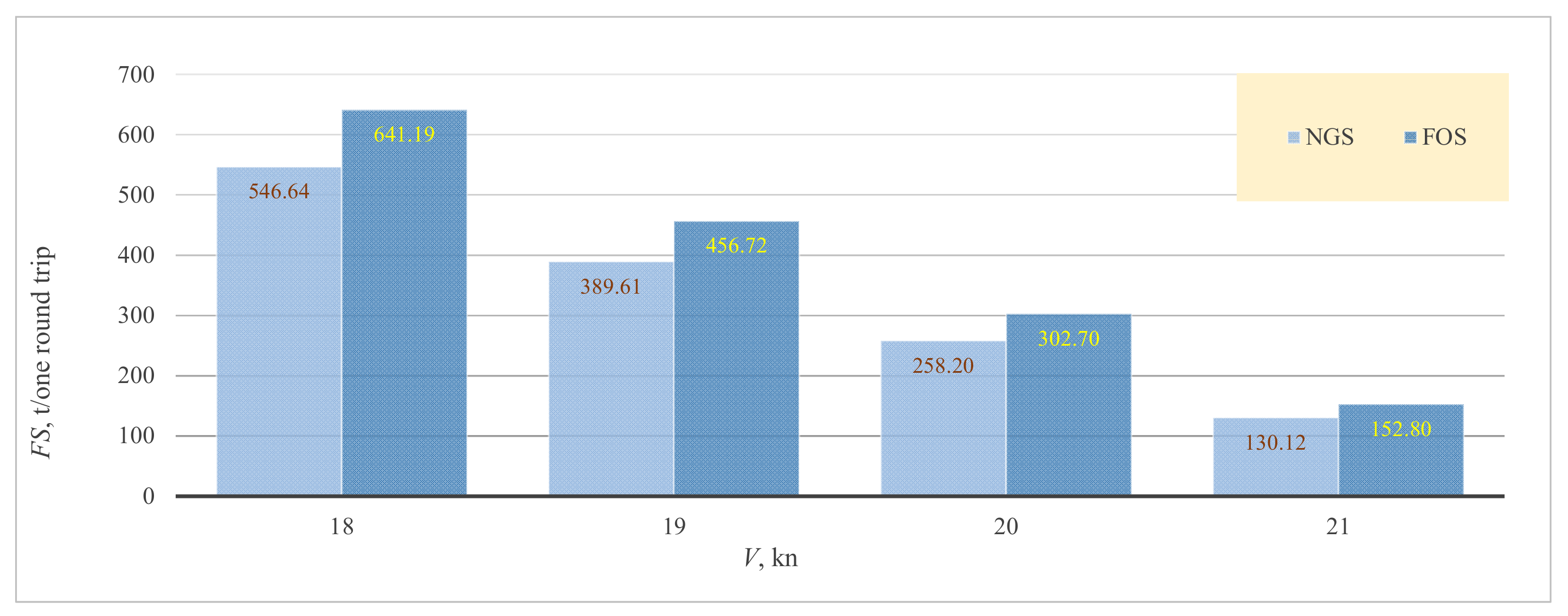
Finally, the fuel savings (
FS) and carbon dioxide reduction (
CDR), per one kilometer of the sailing route in selected FM at specified TR, for the slow steaming speeds are calculated as follows:
where
corresponds to the sea state within TR areas,
is the maximum attainable sailing speed for the installed propulsion system, and
is slow steaming speed. It should be noted that
and
are calculated concerning the maximum attainable sailing speeds in realistic sailing conditions defined by sea states expected in each segment of the sailing route.
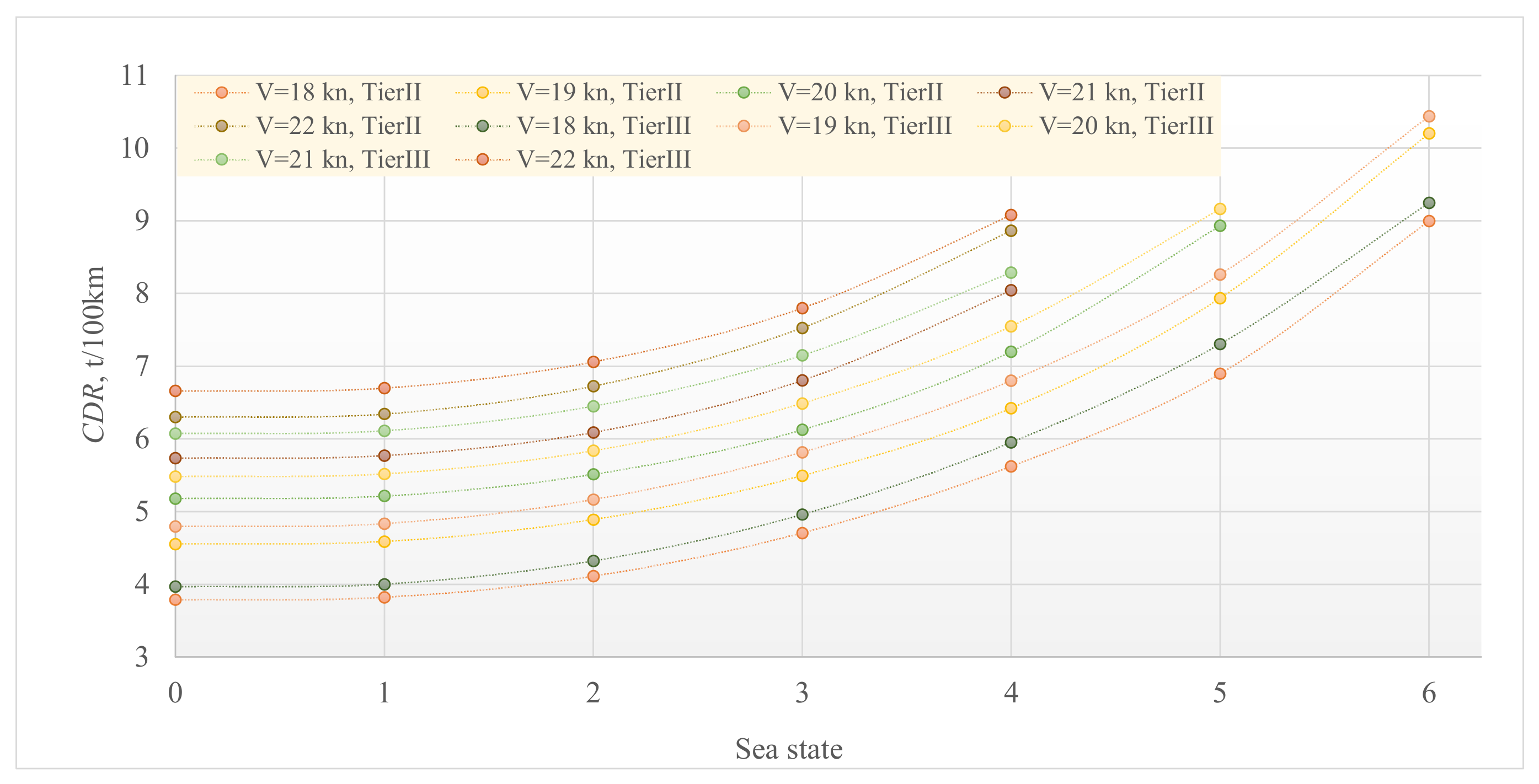
Additionally, the gasification effects on
CDR are considered for the ecological valorization of the container ship powered by NG compared to the one powered by FO. Therefore, the corresponding CO
2 emission reduction (
CDRG—
CDR for gasification) for slow steaming speeds is calculated as follows:
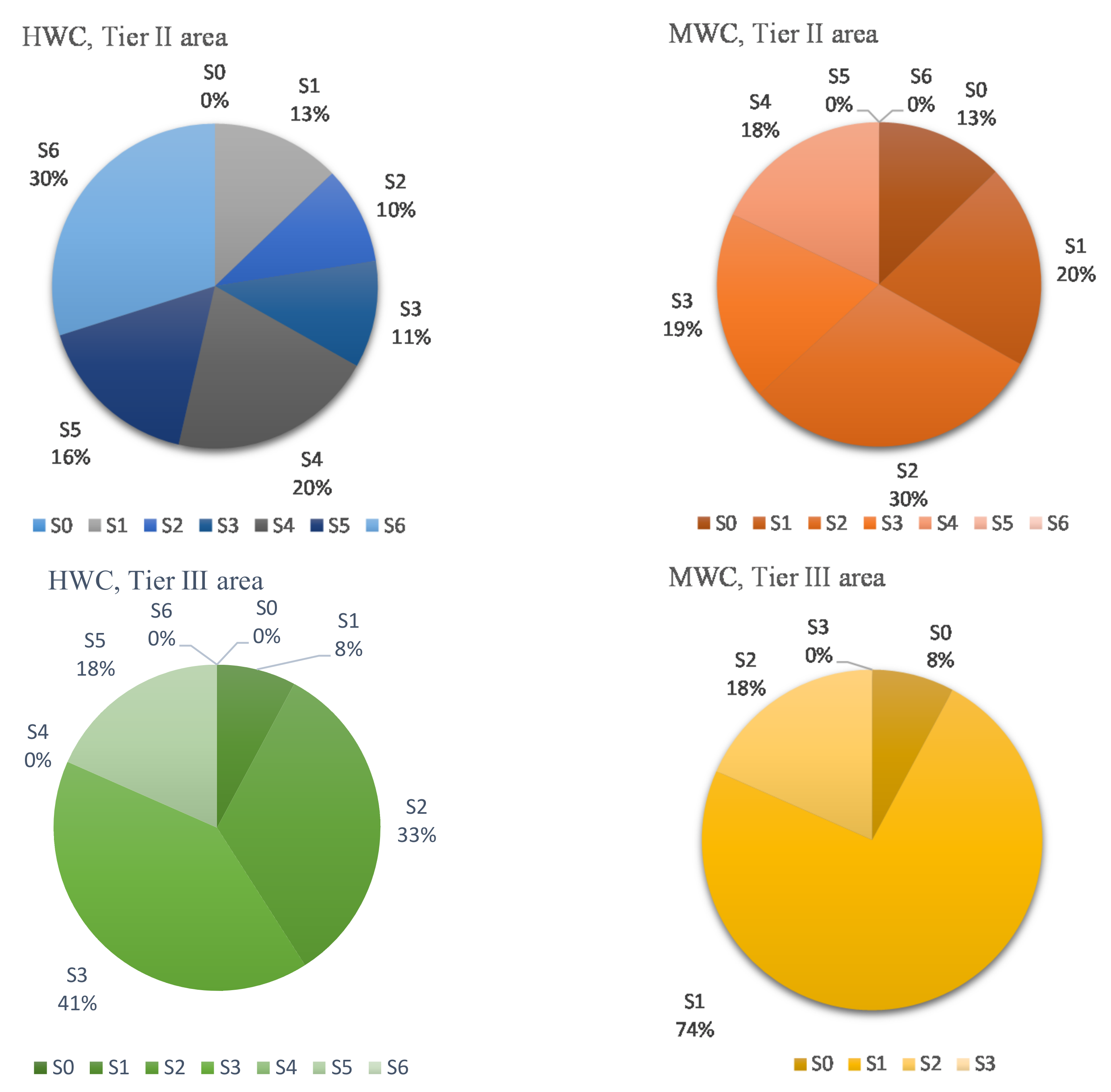
The yearly fuel savings (, , and ) and CO2 emission reductions(, , and ) greatly depend on the engine’s load profile, which is rather predictable because container vessels typically navigate by schedule with transoceanic crossings. For a ship to arrive at the port on time, it is important to maintain a schedule, which sometimes requires operation at higher loads than usual, especially during navigation under harsh weather conditions. Therefore, it is necessary to predict the sea states that will occur during moderate and harsh weather conditions.
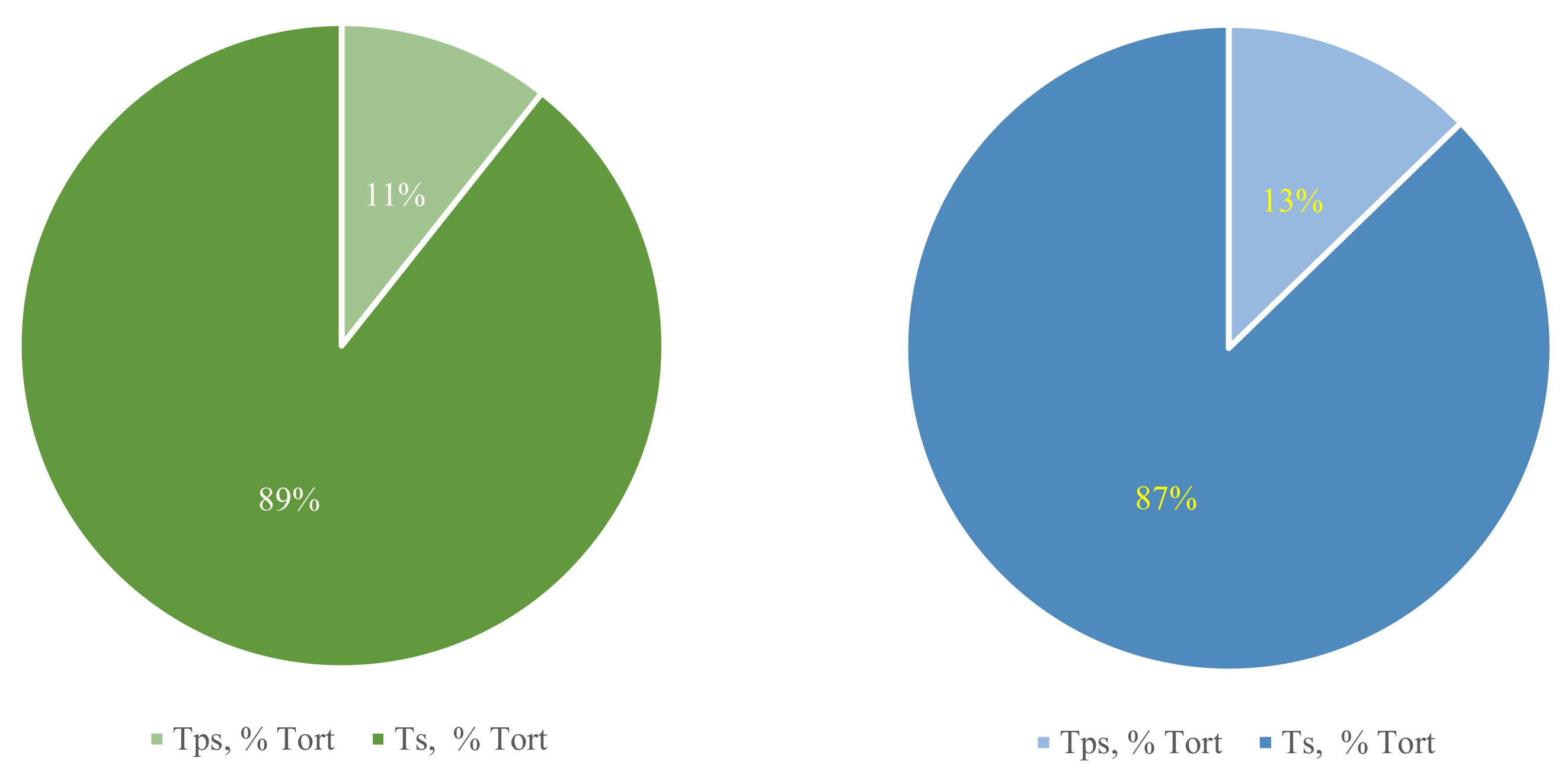
In general, the time interval of one transport cycle between two terminals
(one round trip) contains time intervals of the ship being at berth
(loading and unloading intervals, so-called port staying time), and two navigation intervals
depending on the ship loading condition (so-called one trip). It should be noted that the effects of a ship being at berth and during its maneuvering on the fuel consumption and CO
2 emission have been ignored since fuel consumption and CO
2 emissions are the most conspicuous during the sail [
32]. In further analysis, navigation intervals in a full loading condition are considered only, taking into account different IMO regulations for certain parts of the sailing route.
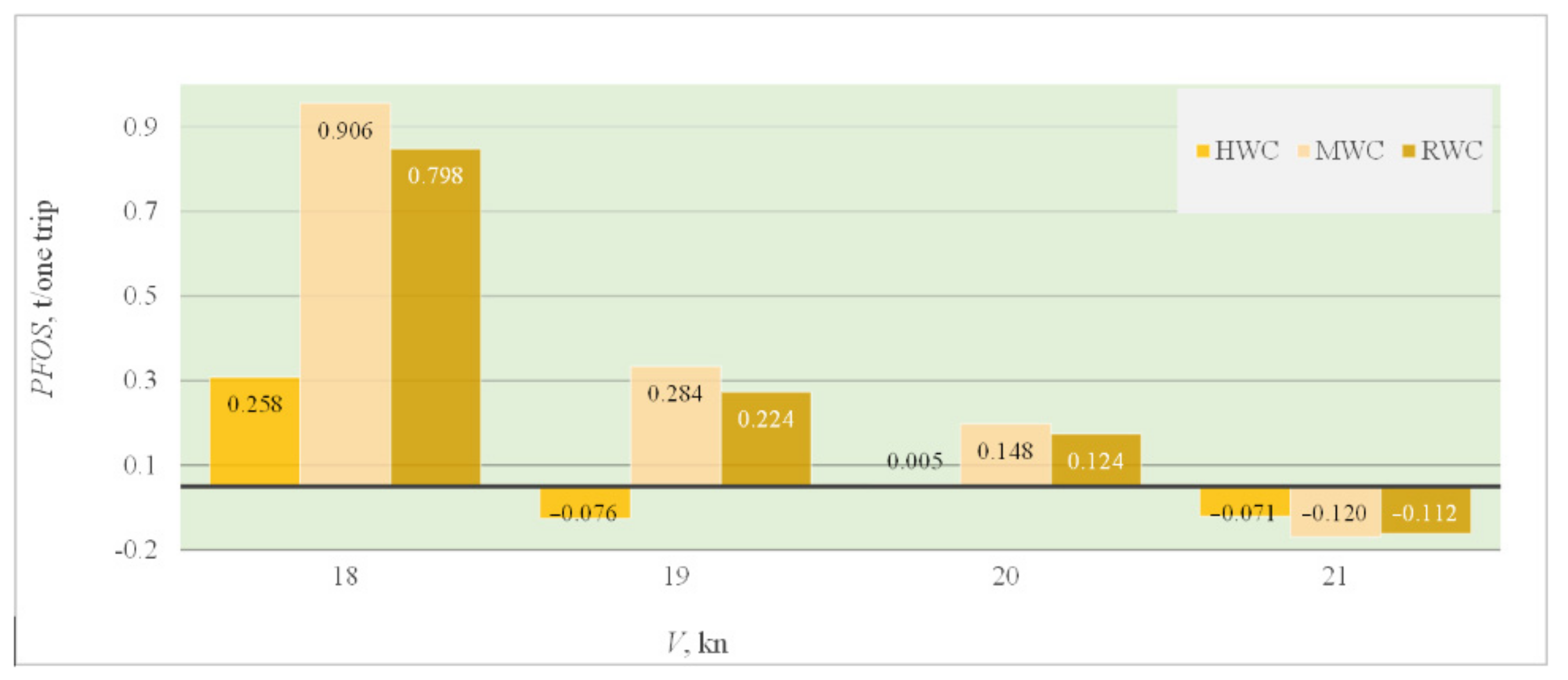
Furthermore, based on the realistic environmental conditions that can be experientially predicted based on logbooks for container ships on the particular sailing route, the overall sailing route can be divided into segments with respect to the sea states that will occur during one year. In that context, the occurrence of moderate (MWC) and harsh weather conditions (HWC) is defined for the analyzed sailing route, denoted as and for moderate and rough sea states, respectively.
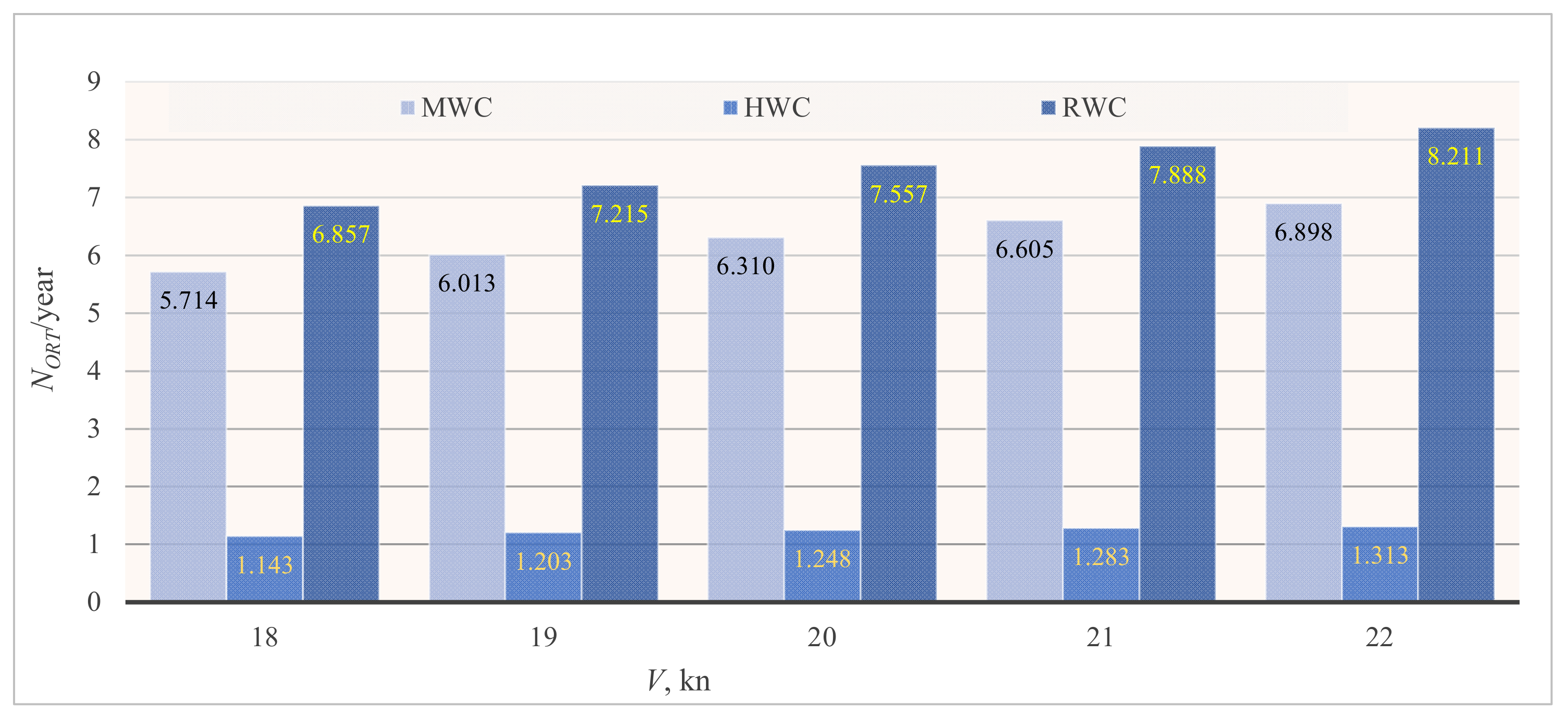
The total number of round trips per year
, depending on the assumed weather conditions defined by the weather conditions factor
and slow steaming speed, is determined as follows:
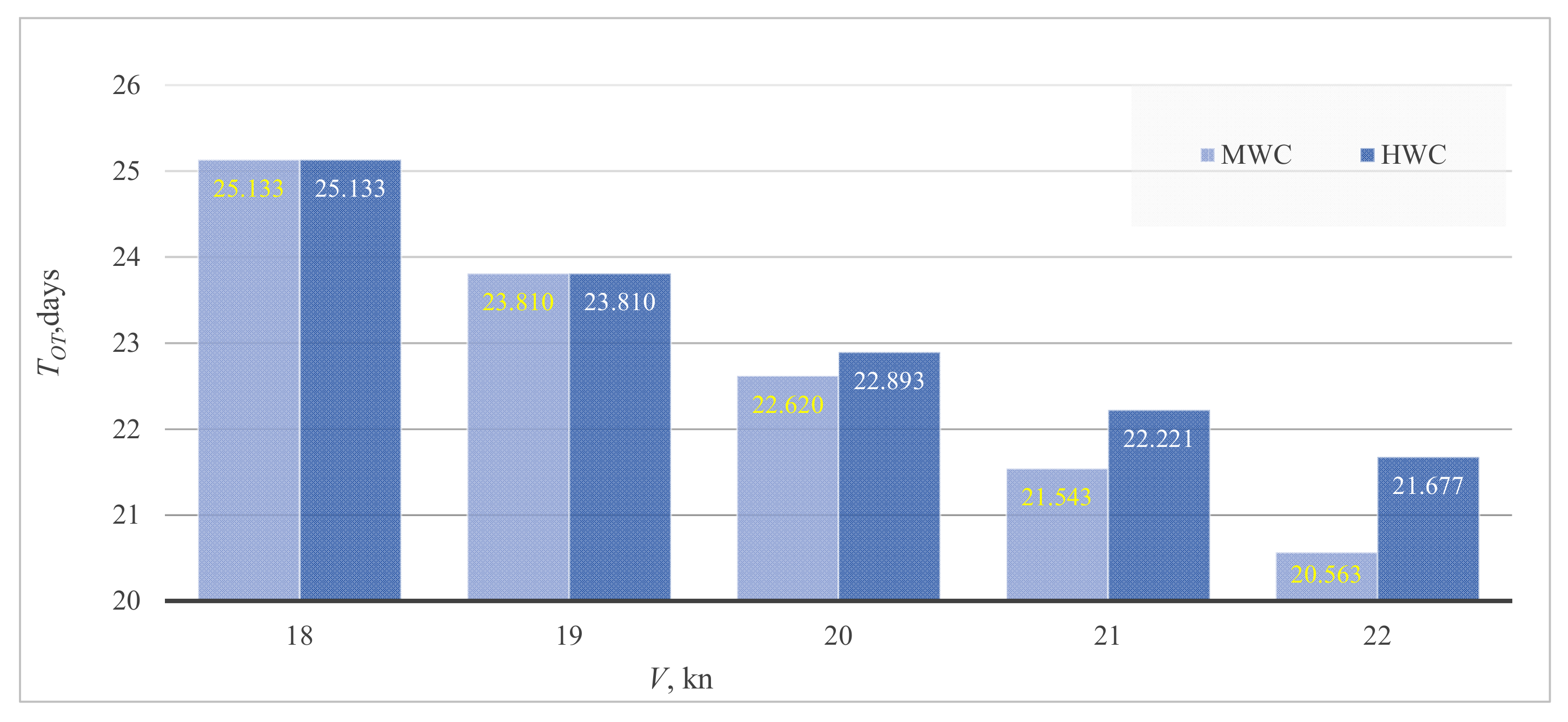
where days is the number of days of the sidereal year, is the port staying time, and is the sailing time between ports, which depends on the ship speed and appearing .
Taking into account the predicted time intervals of the HWC and of the MWC, is defined as .
By assuming that there are no constraints for attainable sailing speed (up to the design speed) under MWC,
for one realistic operating profile of a ship is defined as follows:
where
is the number of ORT per year under MWC, and it is defined as follows:
The times required for one trip under MWC and HWC,
and
, respectively, are defined as follows:
where
is the total length of a route,
is the length of the part of the route with extreme sea states under HWC constraining the design sailing speed
,
is the highest sea state that does not constrain the sailing speed,
is the number of sea states that do not constrain the sailing speed,
is the number of sea states under HWC limiting sailing speed (
),
is the sailing speed without constrains for all
, and
is the maximum attainable sailing speed for
.
To calculate the fuel savings (
,
, and
) and CO
2 emission reduction in FO-fueled mode
and NG-fueled mode
, and
during the one trip and for the specified slow steaming speed
, the following equations are used:
where
and
are lengths of the sailing route segments where
occur in MECAs (indexed by
II), and ECAs (indexed by
III).
Further, to evaluate the length of the sailing route, the route between Shanghai (index
S) and Hamburg (index
H), assumed to be equal for the westbound and eastbound trip, is divided into
straight line segments on the geographical map (Mercator chart),
Figure 2. Thus, the route length is defined by:
where index
i denotes the initial node of the
jth route segment, and through that route segment the latitude
depends on the longitude
and is expressed as follows:
The differential length of the route segment in the Cartesian coordinate system is defined by the
, where
,
, and
are contained Cartesian differential segments, thus the length of the route segment
is defined by the following integral:
where
is the mean Earth radius (taking into account the average geoid undulation on the sea surface, which is assumed 100 m) obtained by numerical integration.
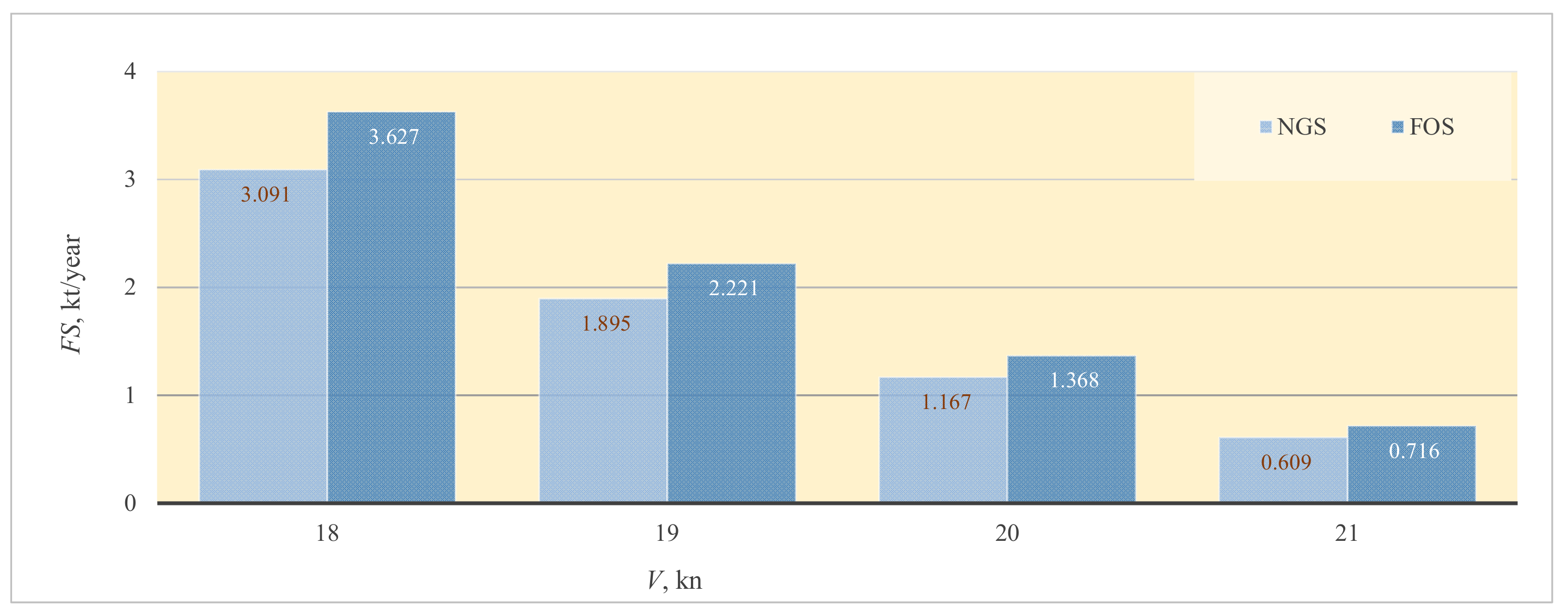
Finally, based on the calculated values of
, the total fuel savings and CO
2 emission reductions per year for a FO- and NG-fueled ship, can be calculated as follows:
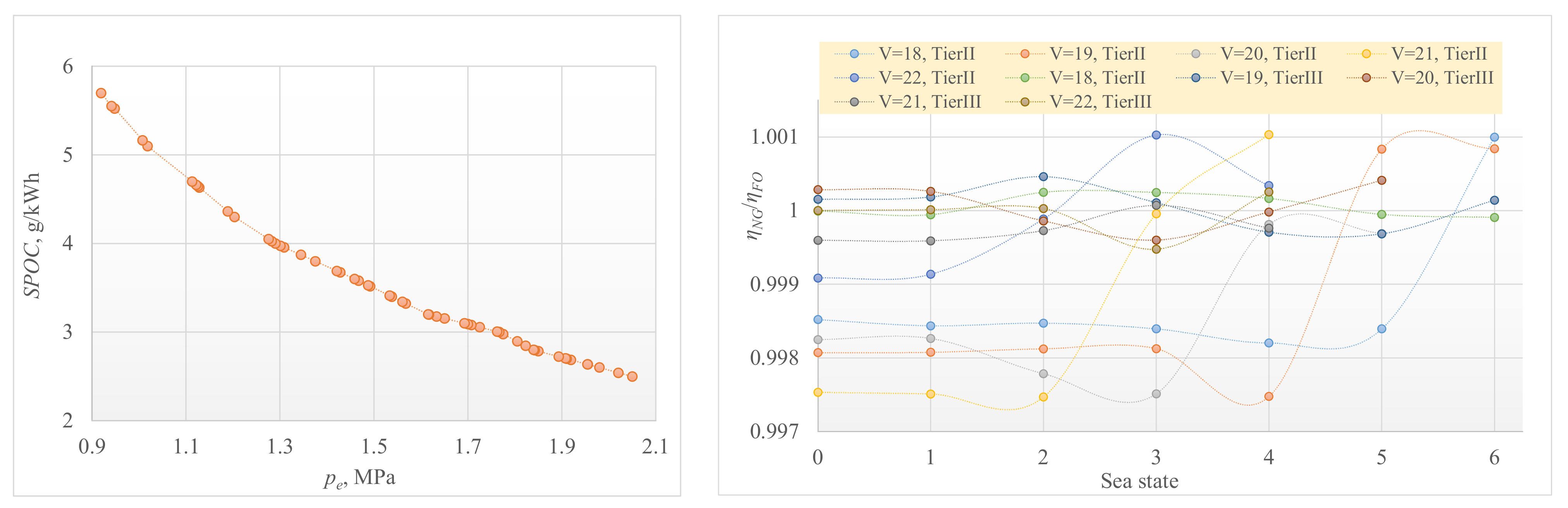
As NG-fueled mode includes simultaneous consumption of PFO and NG, for energy efficiency valorization it is more appropriate to compare total fuel energy consumption in relation to FO mode. For this purpose, the energy efficiency ratio (
EER) between FO- and NG-fueled modes for one year is introduced as follows:
Although the economic aspects of slow steaming are not considered within this paper, their impact on the yearly freight income is worth mentioning, which is a key parameter for the evaluation of the economic effects. The freight income efficiencies ratio (
FIER) between freight incomes achievable at slow steaming and those achievable at maximum attainable sailing speeds on the sailing route during one year is defined as:




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}