
Coordinated Formation Control of Discrete-Time Autonomous Underwater Vehicles under Alterable Communication Topology with Time-Varying Delay


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- Depending on the presence or absence of communication delay, two feasible coordinated controllers are designed to guarantee that multiple AUVs can achieve formation in the discrete time domain.
- (2)
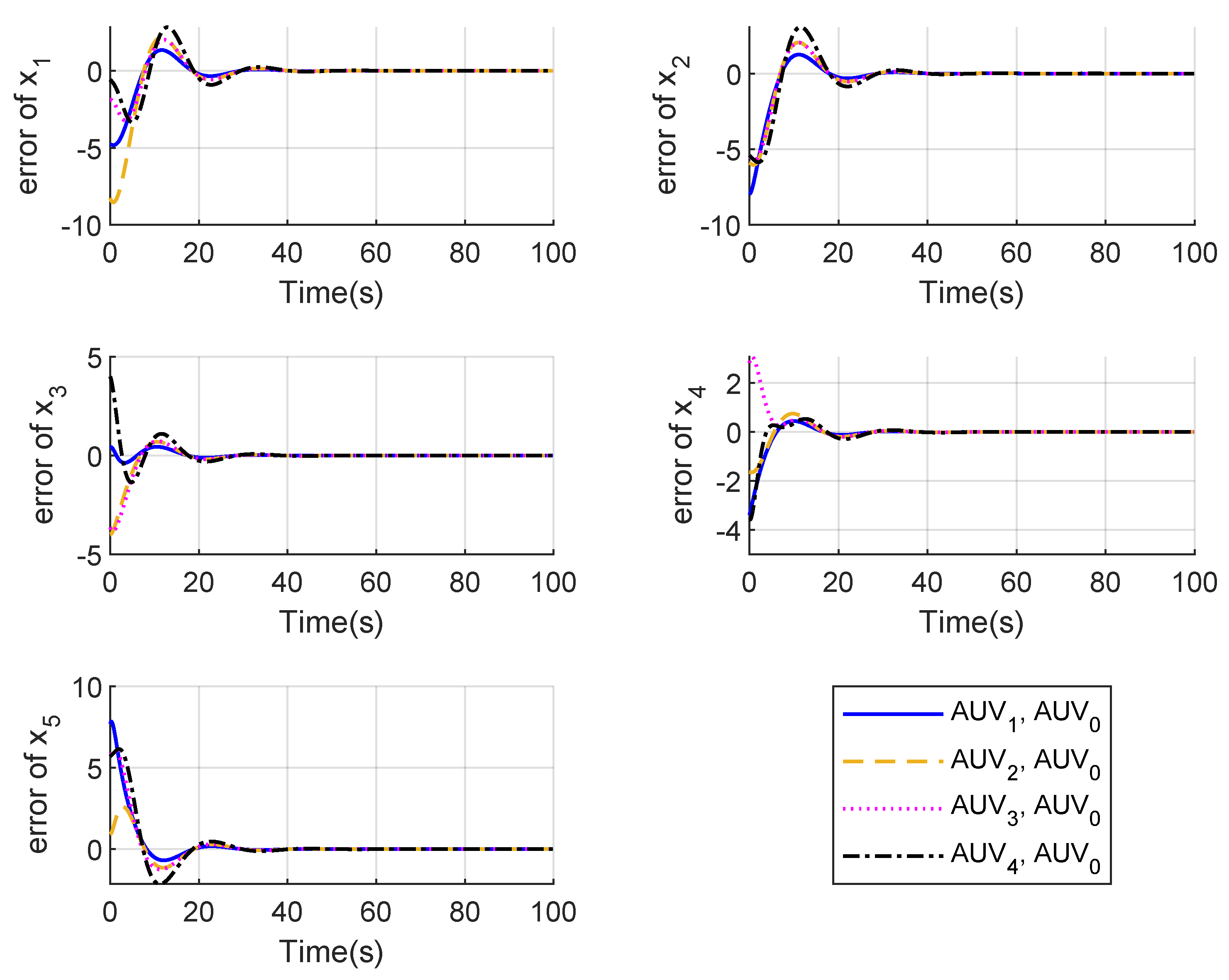
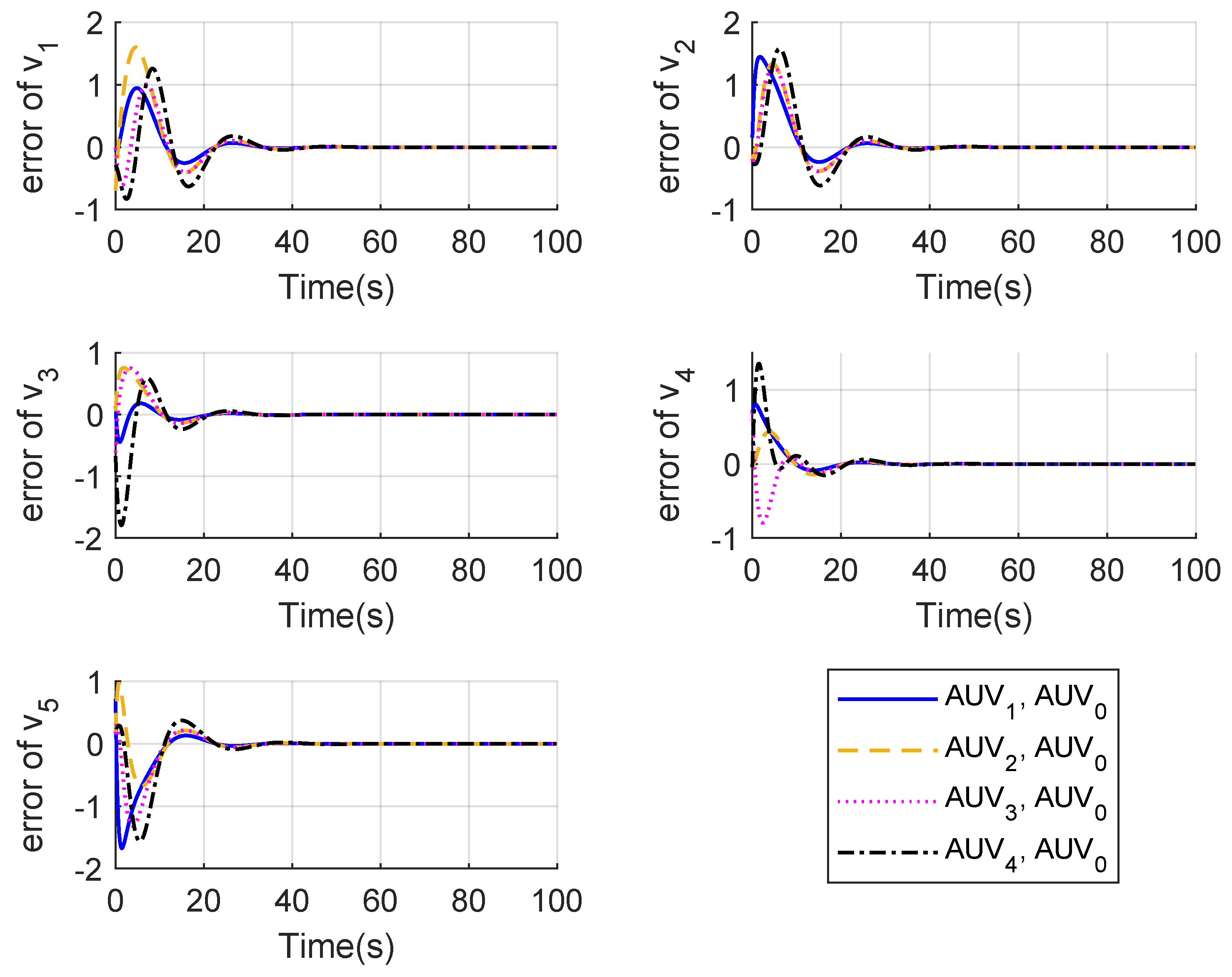
- The error system between the leader and the followers is constructed and new sufficient conditions to keep it asymptotically stable are derived. Based on these conditions, practicable controller gains can be deduced, as well as constraints on the alterable communication topology.
- (3)
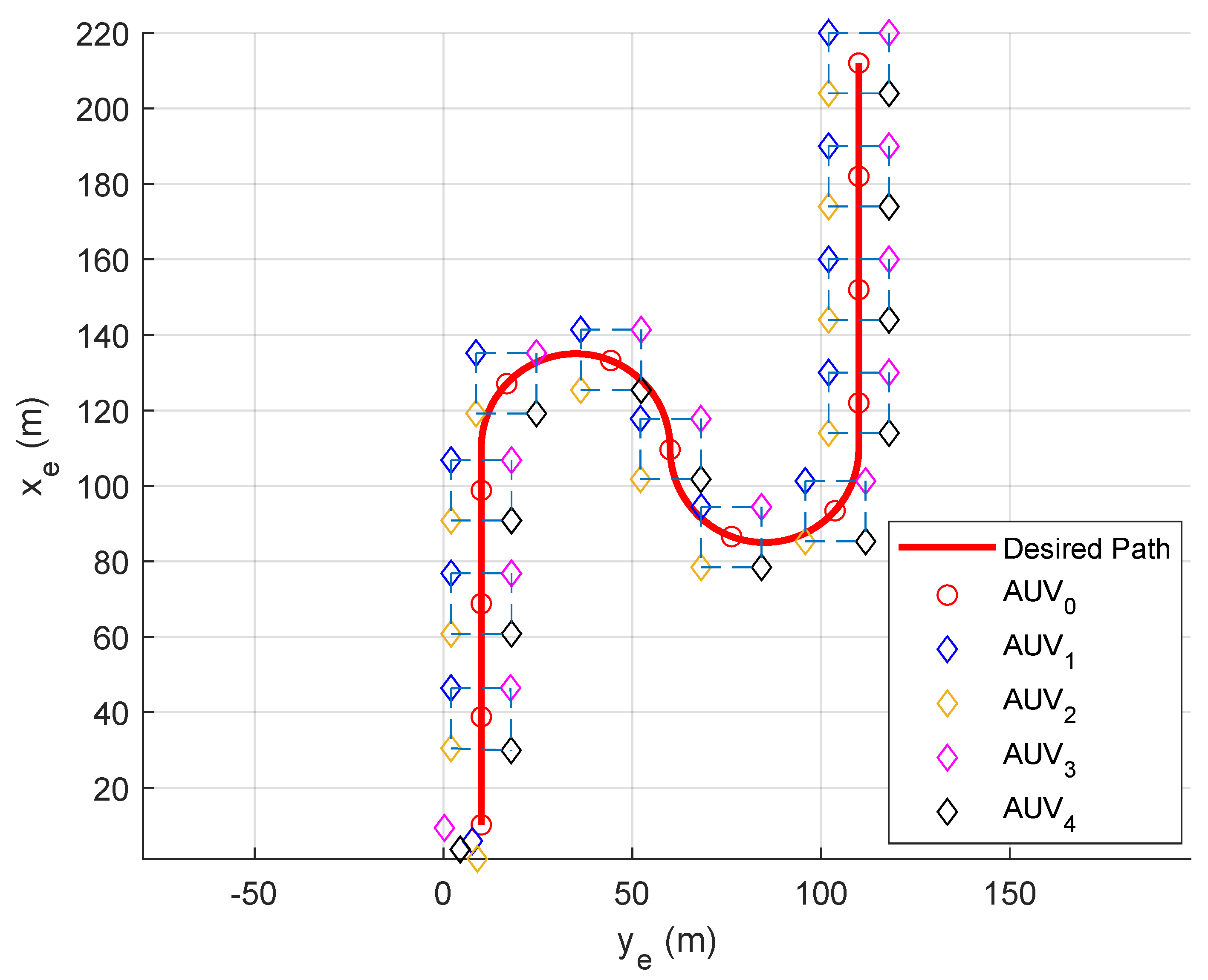
- In order to validate the feasibility of the main theoretical results, two-dimensional and three-dimensional multiple AUVs simulations are carried out, respectively. The results are compared to show the power of different communication conditions on the control system.
2. Preliminaries
2.1. Notations
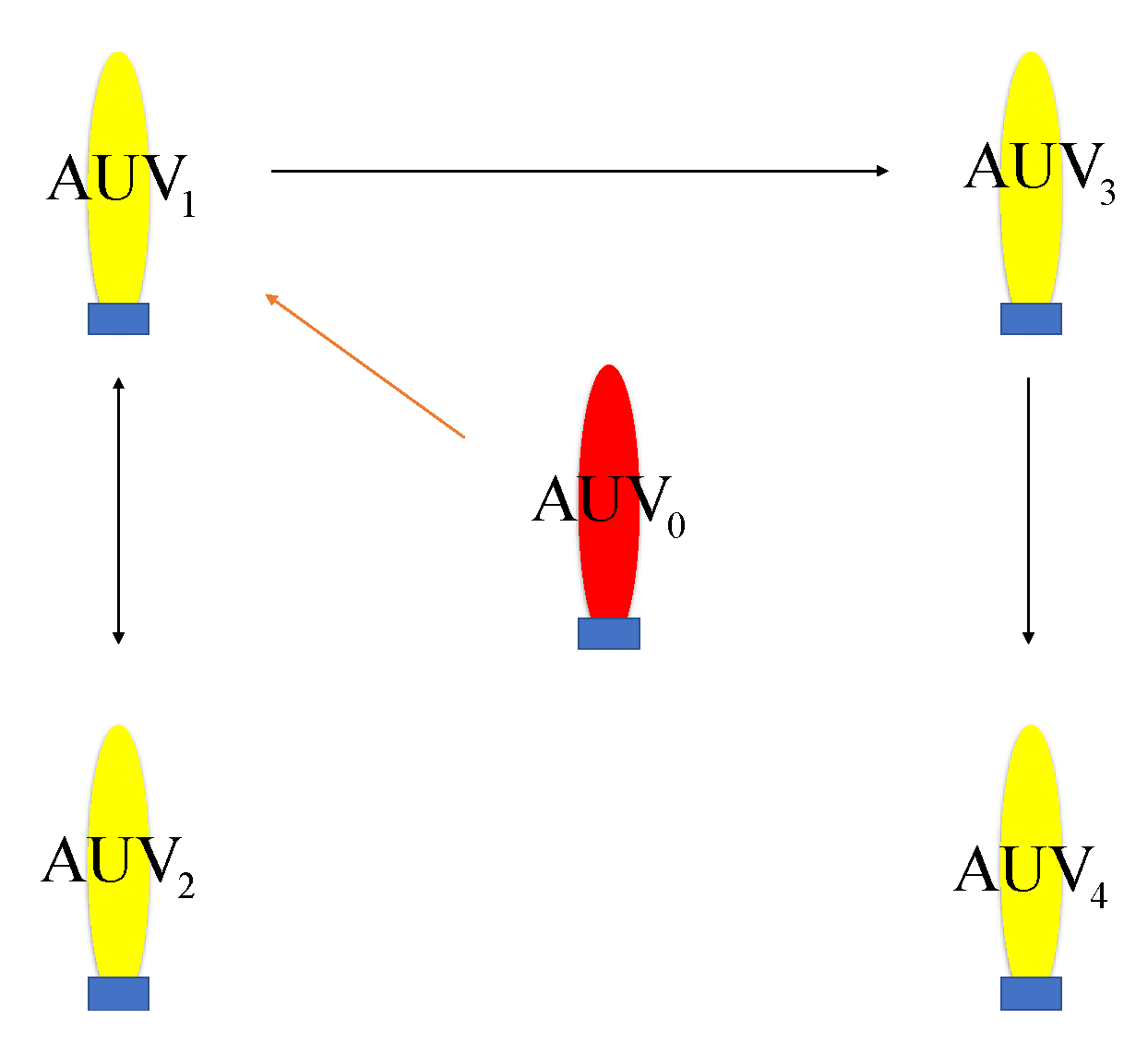
2.2. Graph Theory
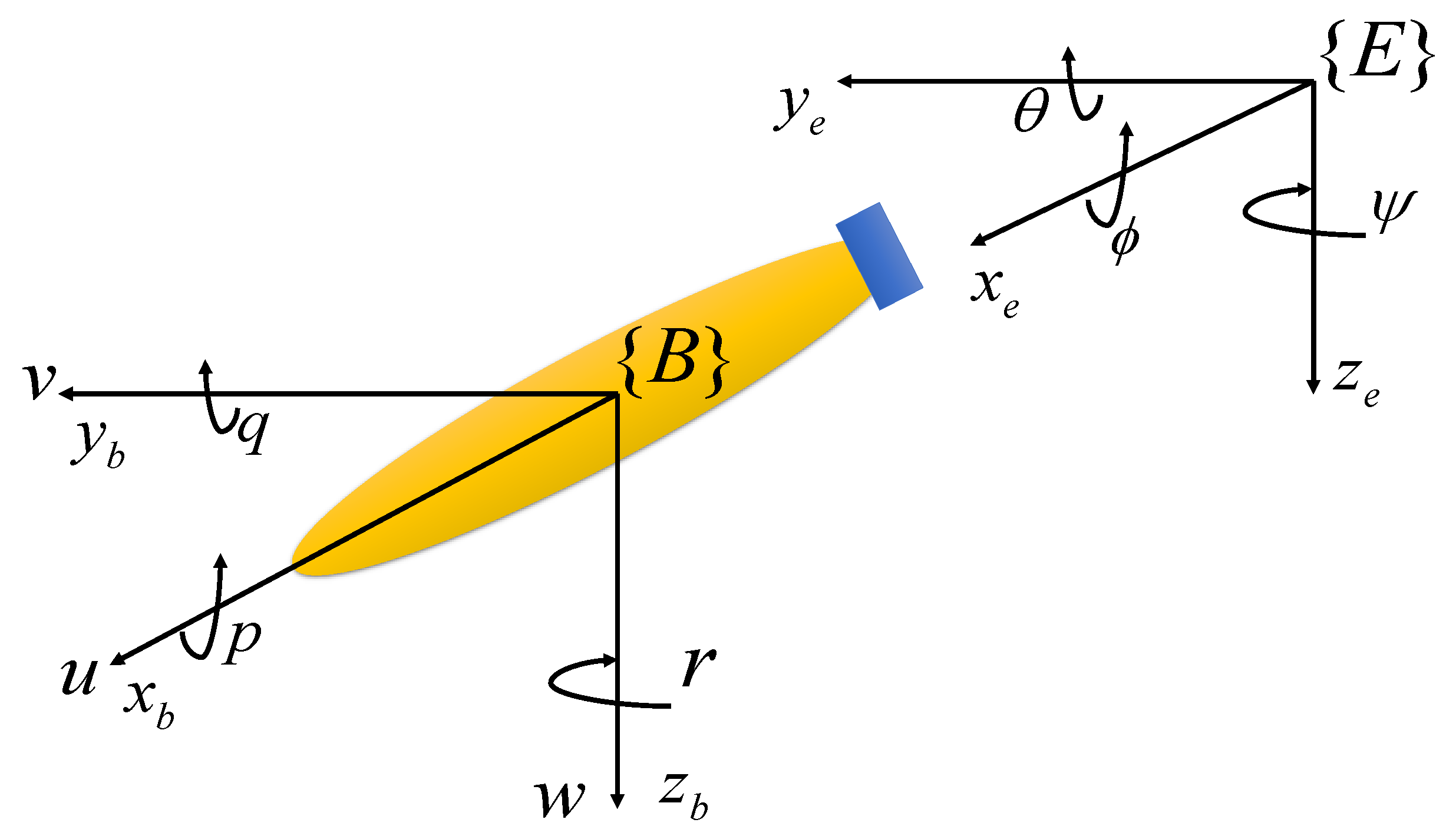
2.3. Feedback Linearization of AUV Model
2.4. Lemmas and Definitions
- (1)
- ;
- (2)
- ;
- (3)
- .
- (1)
- only have distinct real roots, respectively, , ;
- (2)
- and the roots of satisfy one of the following four cases:
- (a)
- ;
- (b)
- ;
- (c)
- ;
- (d)
- .
3. Main Results
3.1. Coordinated Formation Control without Communication Delay
- (1)
- has two distinct real roots ;
- (2)
- , where is the only root of ;
- (3)
- .
3.2. Coordinated Formation Control with Time-Varying Communication Delay
- (1)
- has two distinct real roots ;
- (2)
- ;
- (3)
- .
4. Simulation Results and Discussion
4.1. Example-1
4.2. Example-2
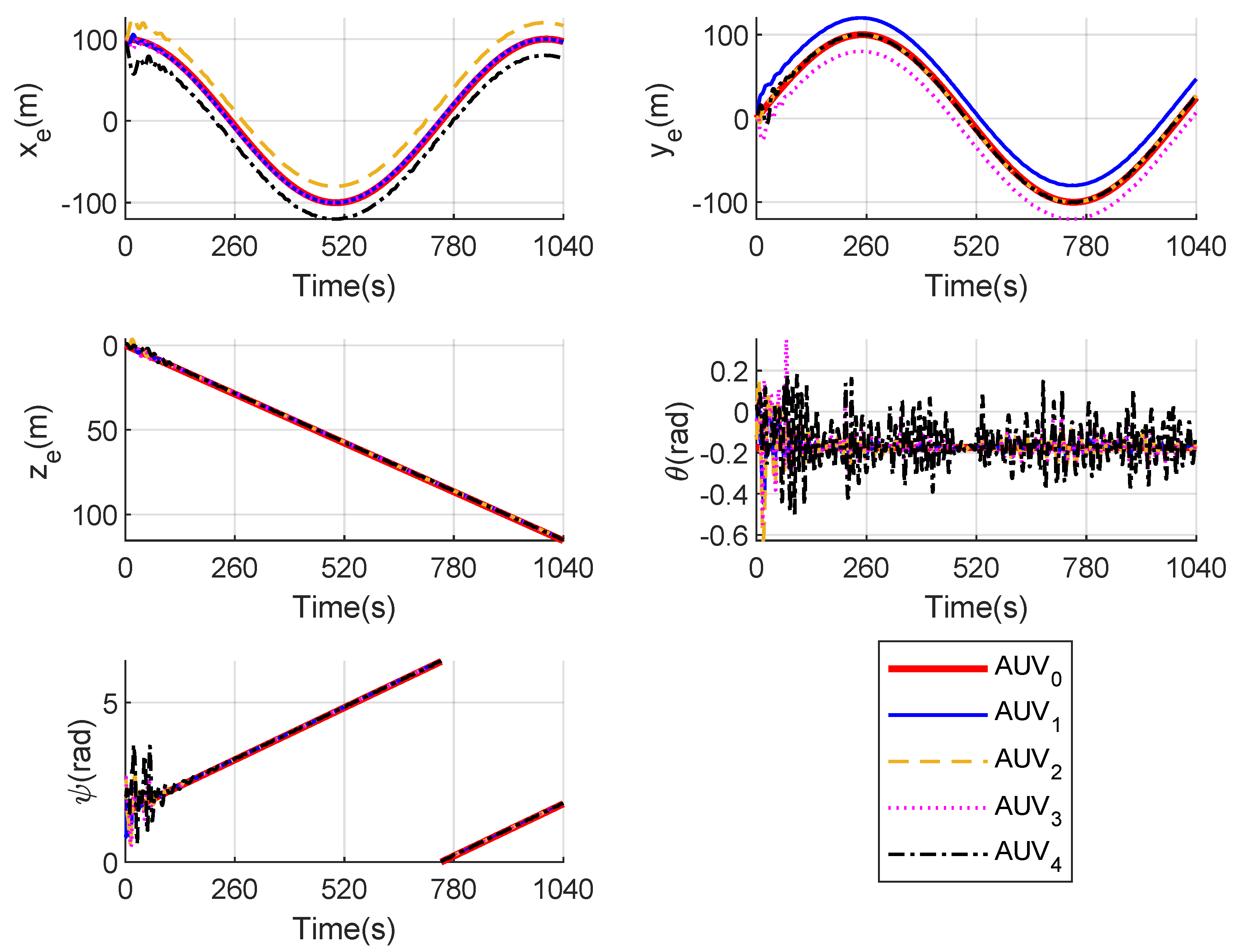
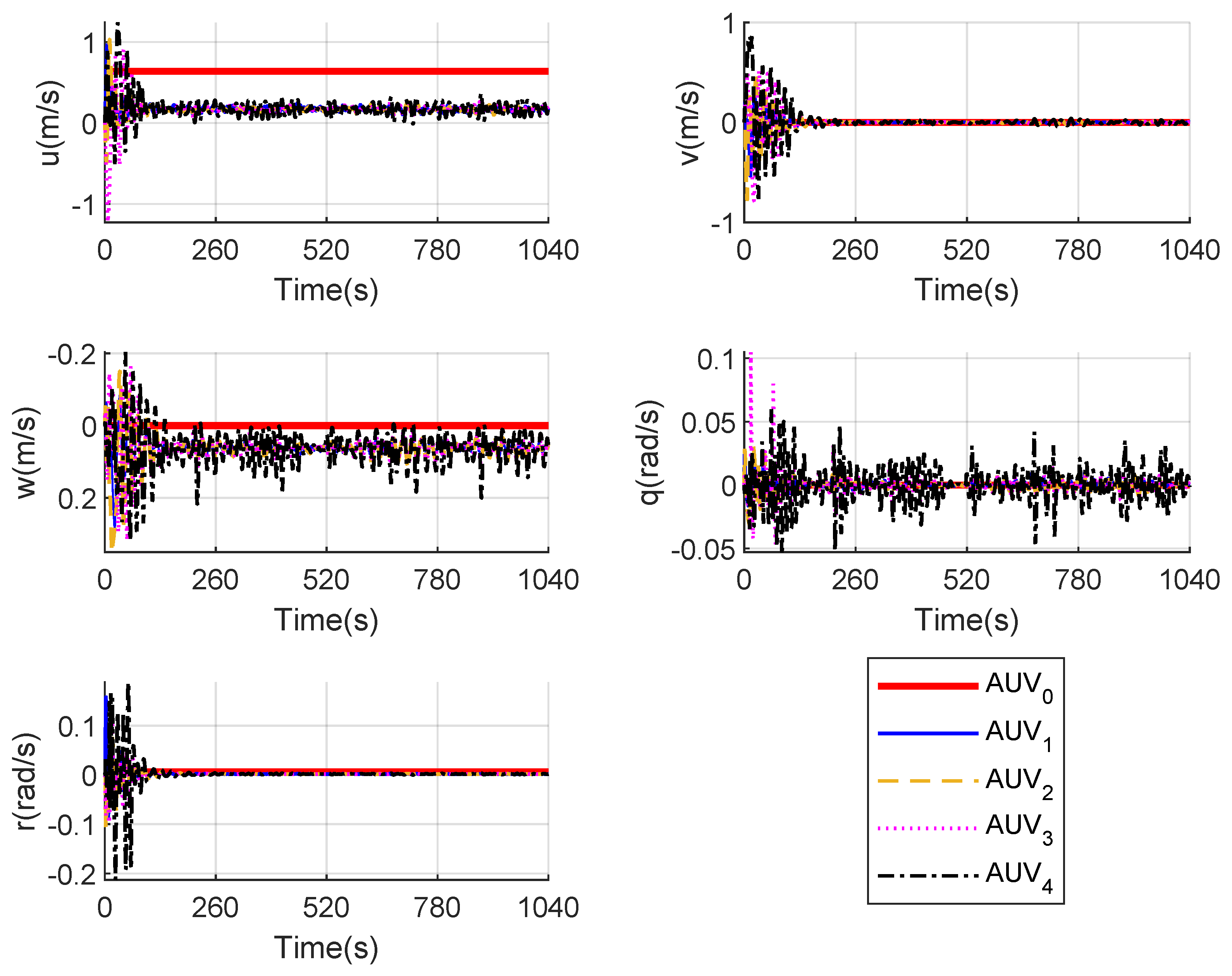
4.3. Example-3
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, H.Z.; Wang, C.F.; Zhang, F.M. A decoupled controller design approach for formation control of autonomous underwater vehicles with time delays. IET Control Theory Appl. 2013, 7, 1950–1958. [Google Scholar] [CrossRef]
- Yang, Y.; Xiao, Y.; Li, T.S. A Survey of Autonomous Underwater Vehicle Formation: Performance, Formation Control, and Communication Capability. IEEE Commun. Surv. Tutor. 2021, 23, 815–841. [Google Scholar] [CrossRef]
- Alam, K.; Ray, T.; Anavatti, S.G. Design Optimization of an Unmanned Underwater Vehicle Using Low- and High-Fidelity Models. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2794–2808. [Google Scholar] [CrossRef]
- Kim, J.; Joe, H.; Yu, S.C.; Lee, J.S.; Kim, M. Time-Delay Controller Design for Position Control of Autonomous Underwater Vehicle Under Disturbances. IEEE Trans. Ind. Electron. 2016, 63, 1052–1061. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, M.; Wang, S. Adaptive region tracking control with prescribed transient performance for autonomous underwater vehicle with thruster fault. Ocean Eng. 2020, 196, 106804. [Google Scholar] [CrossRef]
- Tijjani, A.S.; Chemori, A.; Creuze, V. Robust Adaptive Tracking Control of Underwater Vehicles: Design, Stability Analysis, and Experiments. IEEE-ASME Trans. Mechatron. 2021, 26, 897–907. [Google Scholar] [CrossRef]
- Heshmati-Alamdari, S.; Nikou, A.; Dimarogonas, D.V. Robust Trajectory Tracking Control for Underactuated Autonomous Underwater Vehicles in Uncertain Environments. IEEE Trans. Autom. Sci. Eng. 2021, 18, 1288–1301. [Google Scholar] [CrossRef]
- Zhang, W.; Teng, Y.B.; Wei, S.L.; Xiong, H.H.; Ren, H.L. The robust H-infinity control of UUV with Riccati equation solution interpolation. Ocean Eng. 2018, 156, 252–262. [Google Scholar] [CrossRef]
- Zendehdel, N.; Gholami, M. Robust Self-Adjustable Path-Tracking Control for Autonomous Underwater Vehicle. Int. J. Fuzzy Syst. 2021, 23, 216–227. [Google Scholar] [CrossRef]
- Zhang, Z.C.; Wu, Y.Q. Adaptive Fuzzy Tracking Control of Autonomous Underwater Vehicles With Output Constraints. IEEE Trans. Fuzzy Syst. 2021, 29, 1311–1319. [Google Scholar] [CrossRef]
- Cui, R.X.; Ge, S.S.; How, B.V.E.; Choo, Y.S. Leader-follower formation control of underactuated autonomous underwater vehicles. Ocean Eng. 2010, 37, 1491–1502. [Google Scholar] [CrossRef]
- Qi, X. Adaptive coordinated tracking control of multiple autonomous underwater vehicles. Ocean Eng. 2014, 91, 84–90. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, X.; Wang, S.; Tian, X. Three-dimensional formation–containment control of underactuated AUVs with heterogeneous uncertain dynamics and system constraints. Ocean Eng. 2021, 238, 109661. [Google Scholar] [CrossRef]
- Wei, H.L.; Shen, C.; Shi, Y. Distributed Lyapunov-Based Model Predictive Formation Tracking Control for Autonomous Underwater Vehicles Subject to Disturbances. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 5198–5208. [Google Scholar] [CrossRef]
- Mesbahi, M. On state-dependent dynamic graphs and their controllability properties. IEEE Trans. Autom. Control 2005, 50, 387–392. [Google Scholar] [CrossRef]
- Cao, Y.C.; Yu, W.W.; Ren, W.; Chen, G.R. An Overview of Recent Progress in the Study of Distributed Multi-Agent Coordination. IEEE Trans. Ind. Inf. 2013, 9, 427–438. [Google Scholar] [CrossRef] [Green Version]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and cooperation in networked multi-agent systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef] [Green Version]
- Hatano, Y.; Mesbahi, M. Agreement over random networks. IEEE Trans. Ind. Inf. 2005, 50, 1867–1872. [Google Scholar] [CrossRef]
- Huang, M.Y.; Dey, S.; Nair, G.N.; Manton, J.H. Stochastic consensus over noisy networks with Markovian and arbitrary switches. Automatica 2010, 46, 1571–1583. [Google Scholar] [CrossRef] [Green Version]
- Ai, X.D.; Song, S.J.; You, K.Y. Second-order consensus of multi-agent systems under limited interaction ranges. Automatica 2016, 68, 329–333. [Google Scholar] [CrossRef]
- Huang, N.; Duan, Z.S.; Chen, G.R. Some necessary and sufficient conditions for consensus of second-order multi-agent systems with sampled position data. Automatica 2016, 63, 148–155. [Google Scholar] [CrossRef]
- Yang, S.S.; Liao, X.F.; Liu, Y.B. Second-order consensus in directed networks of identical nonlinear dynamics via impulsive control. Neurocomputing 2016, 179, 290–297. [Google Scholar] [CrossRef]
- Dong, X.W.; Yu, B.C.; Shi, Z.Y.; Zhong, Y.S. Time-Varying Formation Control for Unmanned Aerial Vehicles: Theories and Applications. IEEE Trans. Control Syst. 2015, 23, 340–348. [Google Scholar] [CrossRef]
- Kuriki, Y.; Namerikawa, T. Formation Control of UAVs with a Fourth-order Flight Dynamics. In Proceedings of the 2013 IEEE 52nd Annual Conference on Decision and Control (CDC), Firenze, Italy, 10–13 December 2013; pp. 6706–6711. [Google Scholar]
- Kuriki, Y.; Namerikawa, T. Consensus-based Cooperative Formation Control with Collision Avoidance for a Multi-UAV System. In Proceedings of the 2014 American Control Conference (ACC), Portland, OR, USA, 4–6 June 2014; pp. 2077–2082. [Google Scholar]
- Fabiani, F.; Fenucci, D.; Caiti, A. A distributed passivity approach to AUV teams control in cooperating potential games. Ocean Eng. 2018, 157, 152–163. [Google Scholar] [CrossRef]
- Shojaei, K. Neural network formation control of underactuated autonomous underwater vehicles with saturating actuators. Neurocomputing 2016, 194, 372–384. [Google Scholar] [CrossRef]
- Yan, Z.P.; Pan, X.L.; Yang, Z.W.; Yue, L.D. Formation Control of Leader-Following Multi-UUVs With Uncertain Factors and Time-Varying Delays. IEEE Access 2019, 7, 118792–118805. [Google Scholar] [CrossRef]
- Zhang, W.; Zeng, J.; Yan, Z.P.; Wei, S.L.; Tian, W.D. Leader-following consensus of discrete-time multi-AUV recovery system with time-varying delay. Ocean Eng. 2021, 219, 108258. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, C.; Tian, W.; Zhang, M. Formation trajectory tracking control of discrete-time multi-AUV in a weak communication environment. Ocean Eng. 2022, 245, 110495. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W. Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Trans. Autom. Control 2005, 50, 655–661. [Google Scholar] [CrossRef]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons: Chichester, UK, 1994. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley and Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Yan, Z.P.; Liu, Y.B.; Zhou, J.J.; Zhang, W.; Wang, L. Consensus of multiple autonomous underwater vehicles with double independent Markovian switching topologies and timevarying delays. Chin. Phys. B 2017, 26, 040203. [Google Scholar] [CrossRef]
- Graham, A. Kronecker Products and Matrix Calculus: With Applications; Courier Dover Publications: Mineola, NY, USA, 1981. [Google Scholar]
- Kovacs, I.; Silver, D.S.; Williams, S.G. Determinants of commuting-block matrices. Am. Math. Mon. 1999, 106, 950–952. [Google Scholar] [CrossRef]
- Ogata, K. Discrete-Time Control Systems, 2nd ed.; Prentice-Hall, Inc.: Hoboken, NJ, USA, 1995. [Google Scholar]
- Huang, L.; Wang, L.; Hollot, C.V. On robust stability of polynomials and related topics. J. Syst. Sci. Complex. 1992, 5, 42–54. [Google Scholar]
- Liu, H.Y.; Xie, G.M.; Wang, L. Necessary and sufficient conditions for solving consensus problems of double-integrator dynamics via sampled control. Int. J. Robust Nonlinear Control 2010, 20, 1706–1722. [Google Scholar] [CrossRef]
- Yan, Z.P.; Yu, H.M.; Li, B.Y. Bottom-following control for an underactuated unmanned undersea vehicle using integral-terminal sliding mode control. J. Cent. South Univ. 2015, 22, 4193–4204. [Google Scholar] [CrossRef]
- Yan, Z.; Xu, D.; Chen, T.; Zhang, W.; Liu, Y. Leader-Follower Formation Control of UUVs with Model Uncertainties, Current Disturbances, and Unstable Communication. Sensors 2018, 18, 662. [Google Scholar] [CrossRef] [Green Version]


















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; Zeng, Z.; Guo, C. Coordinated Formation Control of Discrete-Time Autonomous Underwater Vehicles under Alterable Communication Topology with Time-Varying Delay. J. Mar. Sci. Eng. 2022, 10, 712. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse10060712
Yu H, Zeng Z, Guo C. Coordinated Formation Control of Discrete-Time Autonomous Underwater Vehicles under Alterable Communication Topology with Time-Varying Delay. Journal of Marine Science and Engineering. 2022; 10(6):712. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse10060712
Chicago/Turabian StyleYu, Haomiao, Zhenfang Zeng, and Chen Guo. 2022. "Coordinated Formation Control of Discrete-Time Autonomous Underwater Vehicles under Alterable Communication Topology with Time-Varying Delay" Journal of Marine Science and Engineering 10, no. 6: 712. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse10060712