
LCTC Ships Concept Design in the North Europe- Mediterranean Transport Scenario Focusing on Intact Stability Issues



Abstract
:1. Introduction
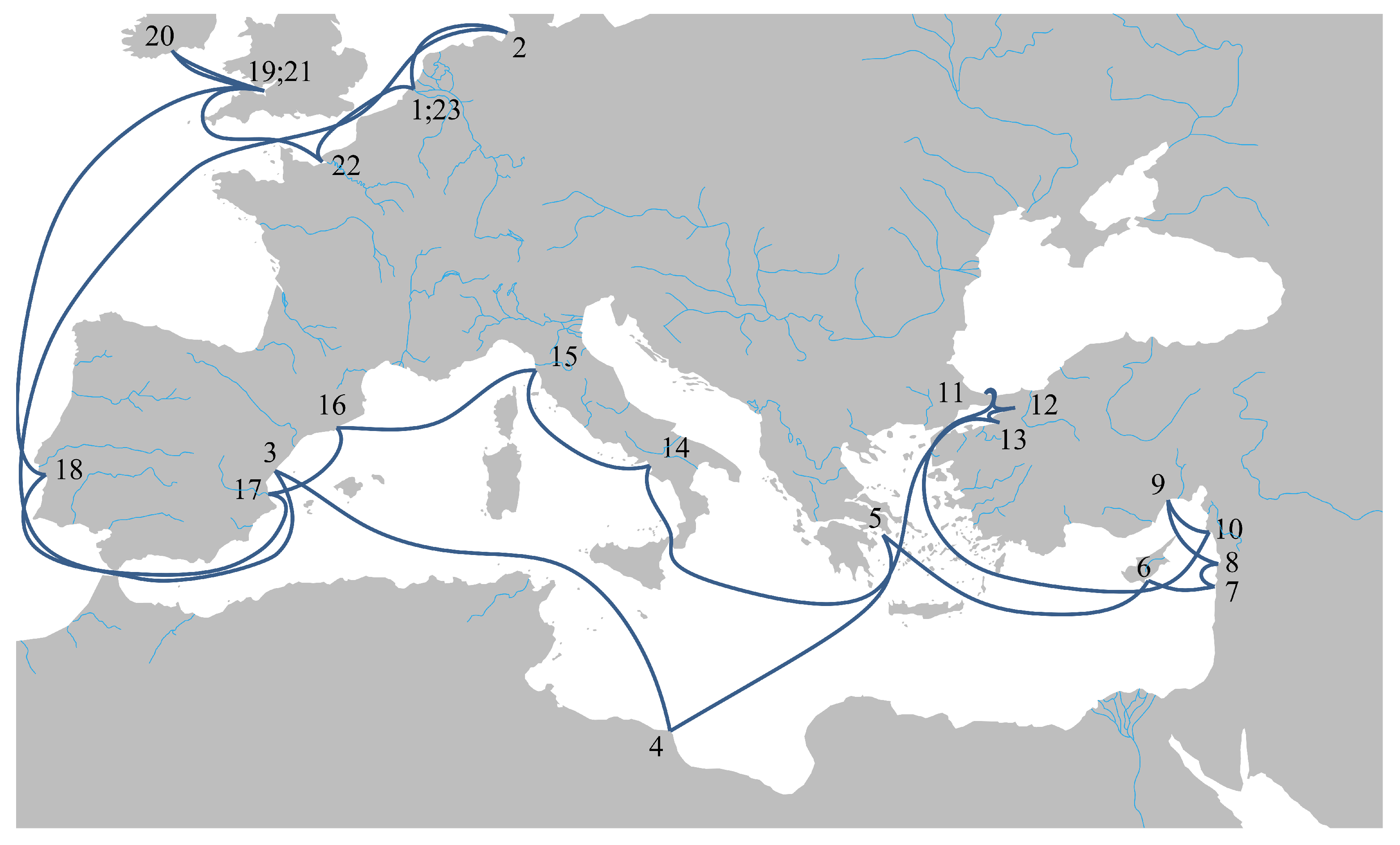
2. Transport Scenario
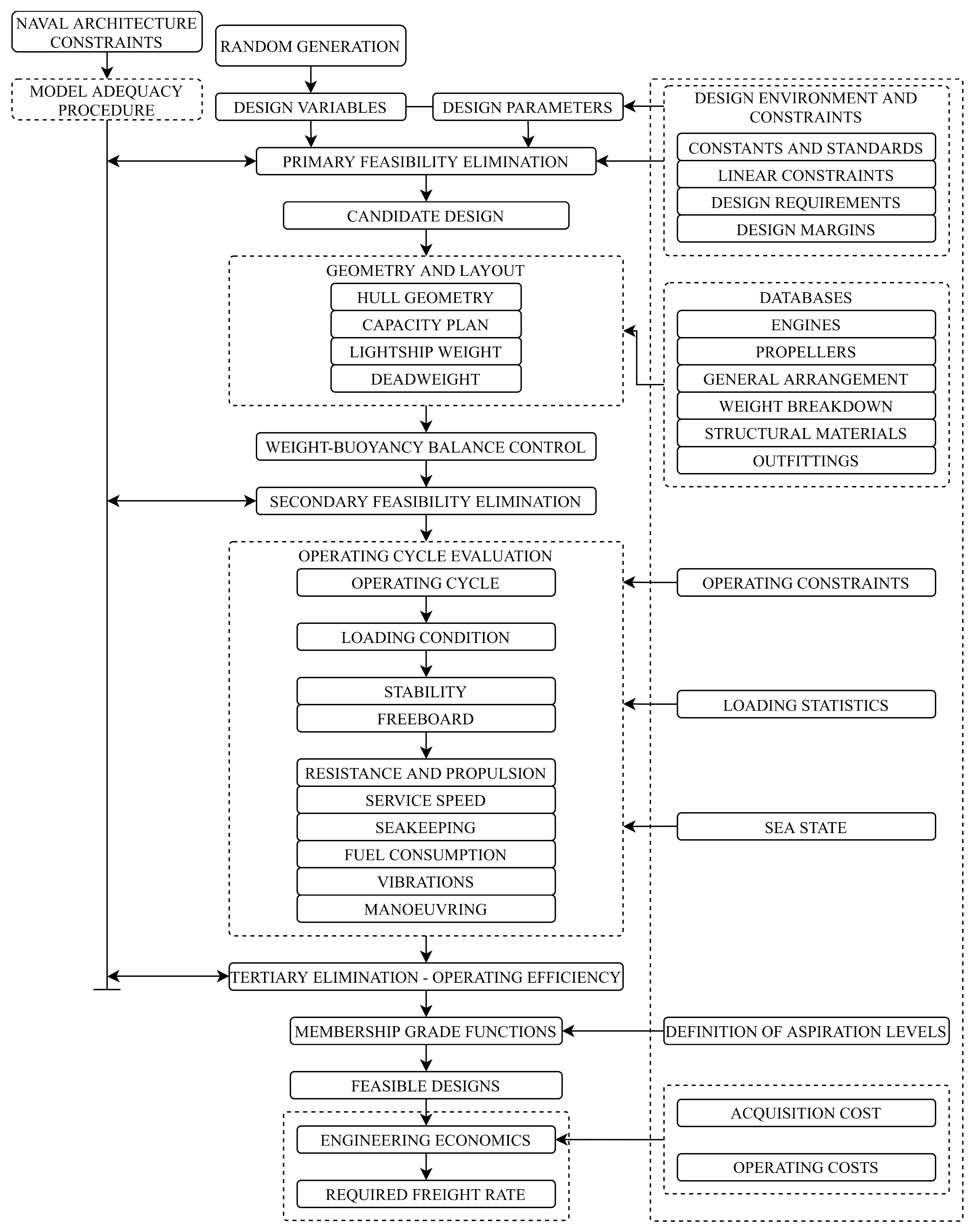
3. Concept Design Methodology
3.1. Mathematical Design Model
- hull form with transom stern and eight structural decks plus five hoistable car decks;
- single-screw propulsion system driven by a two-stroke diesel engine;
- accommodation and wheelhouse following IMO guidelines;
- single rudder and two bow-thrusters;
- stern loading only on the main deck with fixed ramp to weather deck and hoistable ramp to lower hold.
3.2. Engineering Economics
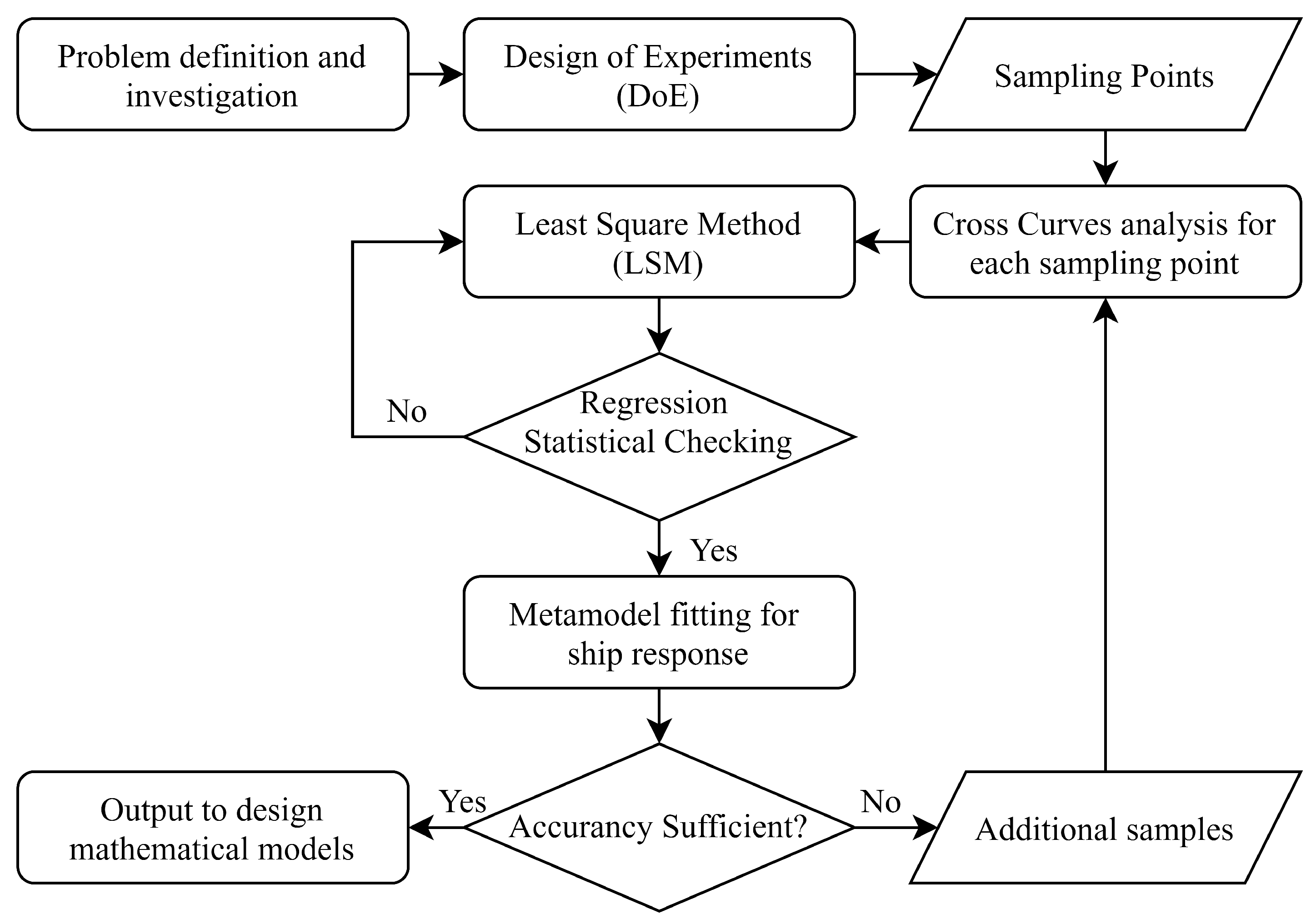
4. Stability Metamodel Methodology
4.1. Variables Normalization
4.2. Multiple Linear Regressions
4.3. Proposed Formulation
5. Application
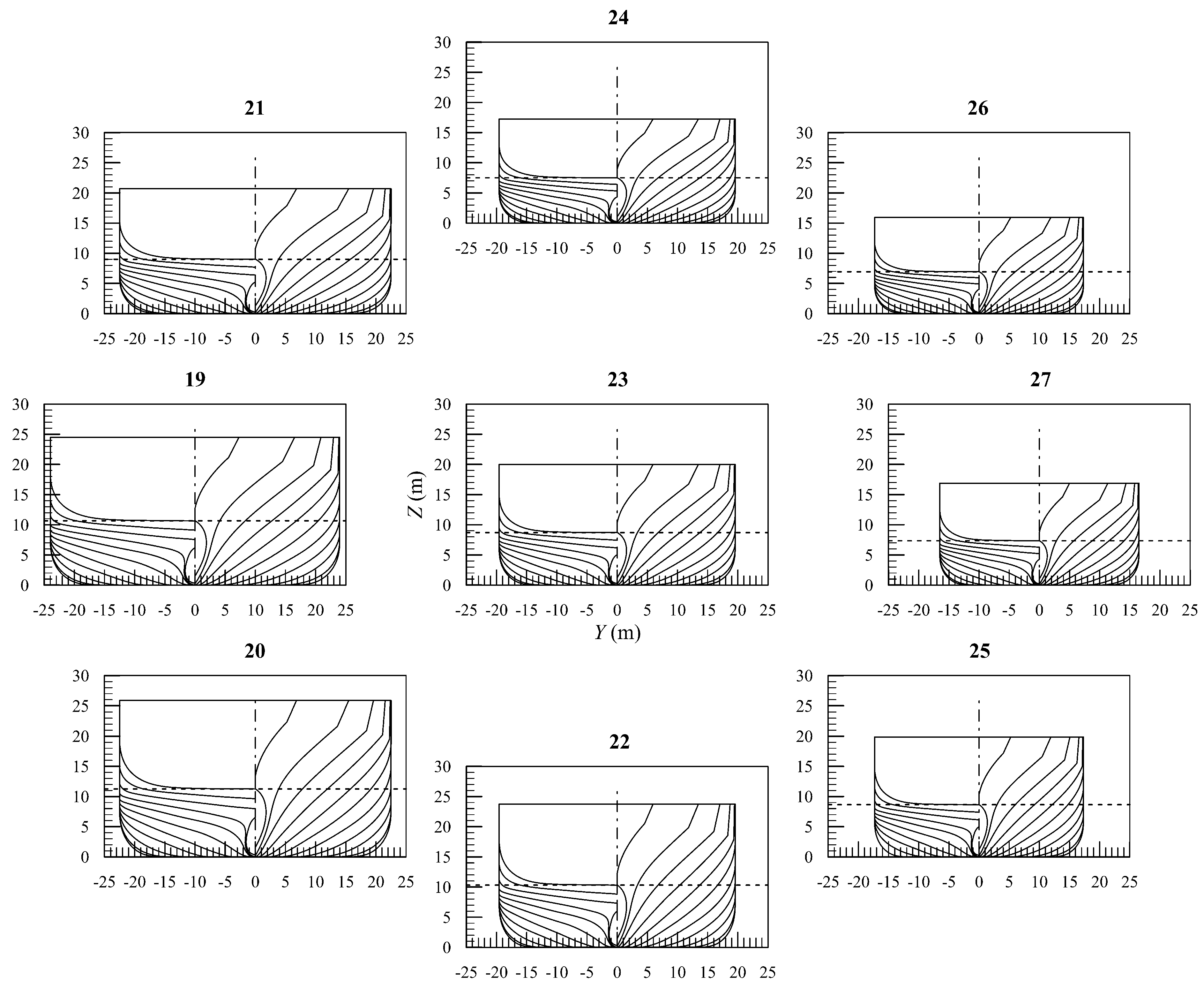
5.1. Database Generation
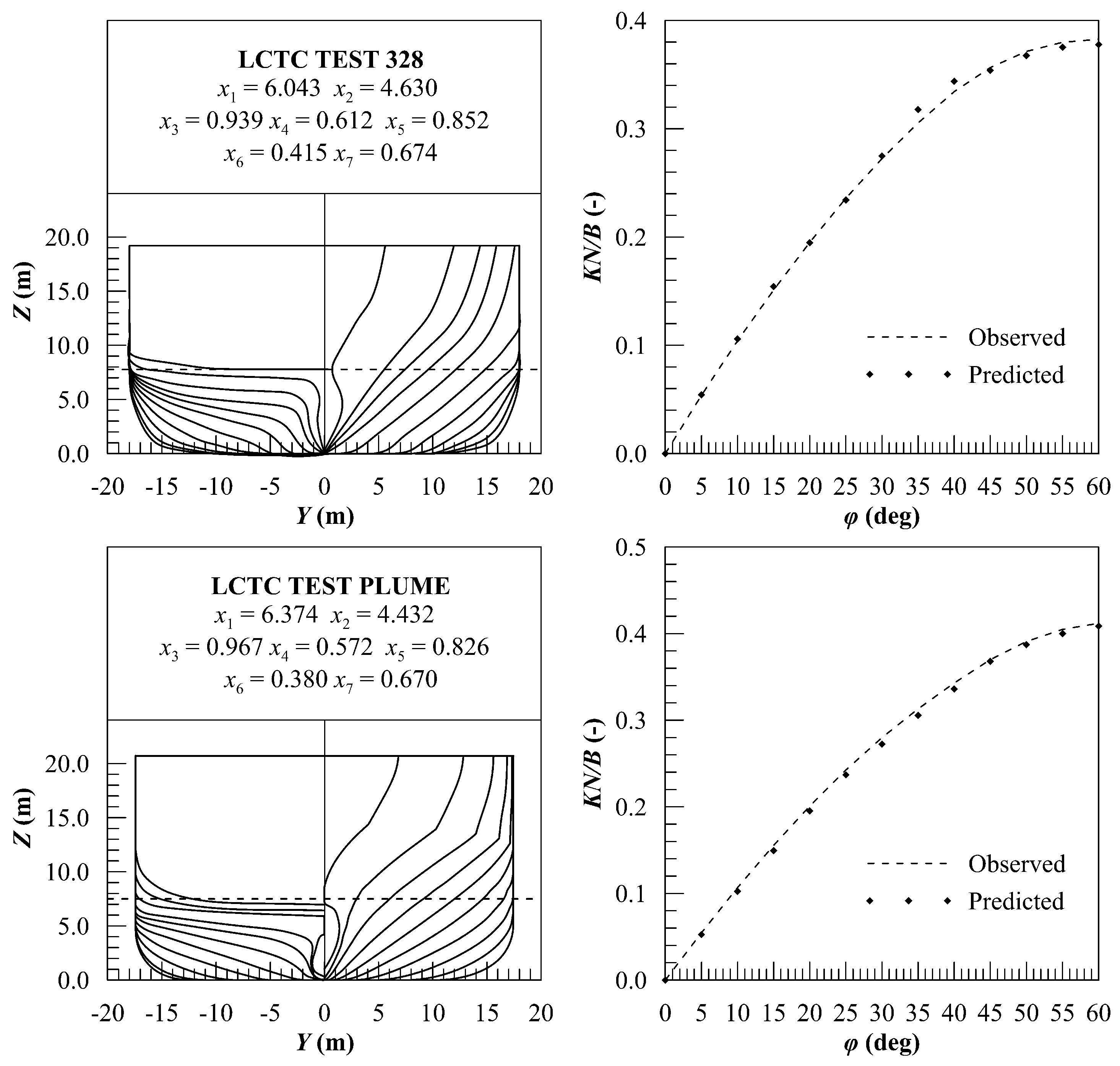
5.2. Ship Stability Prediction
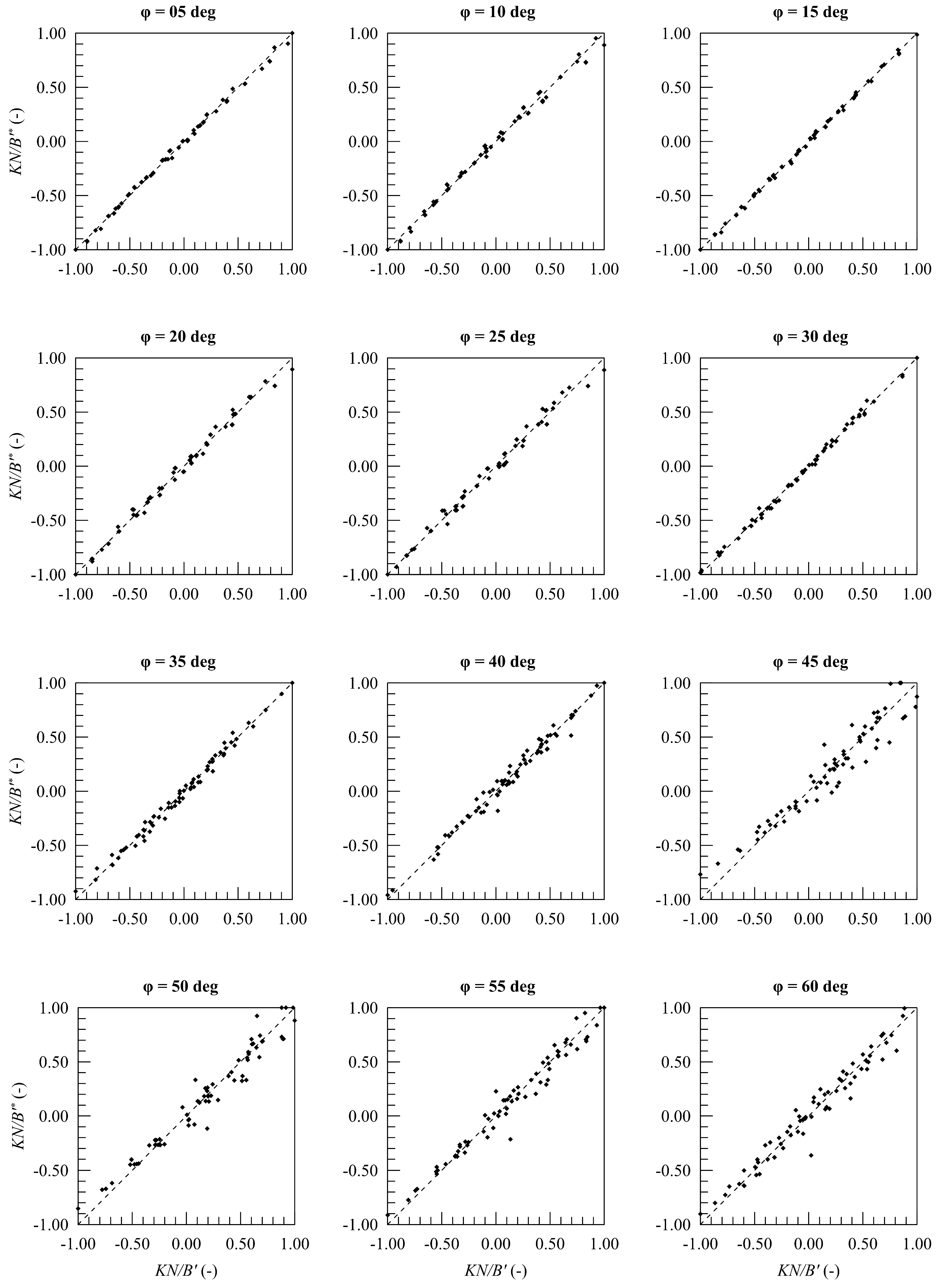
5.3. Metamodel Validation
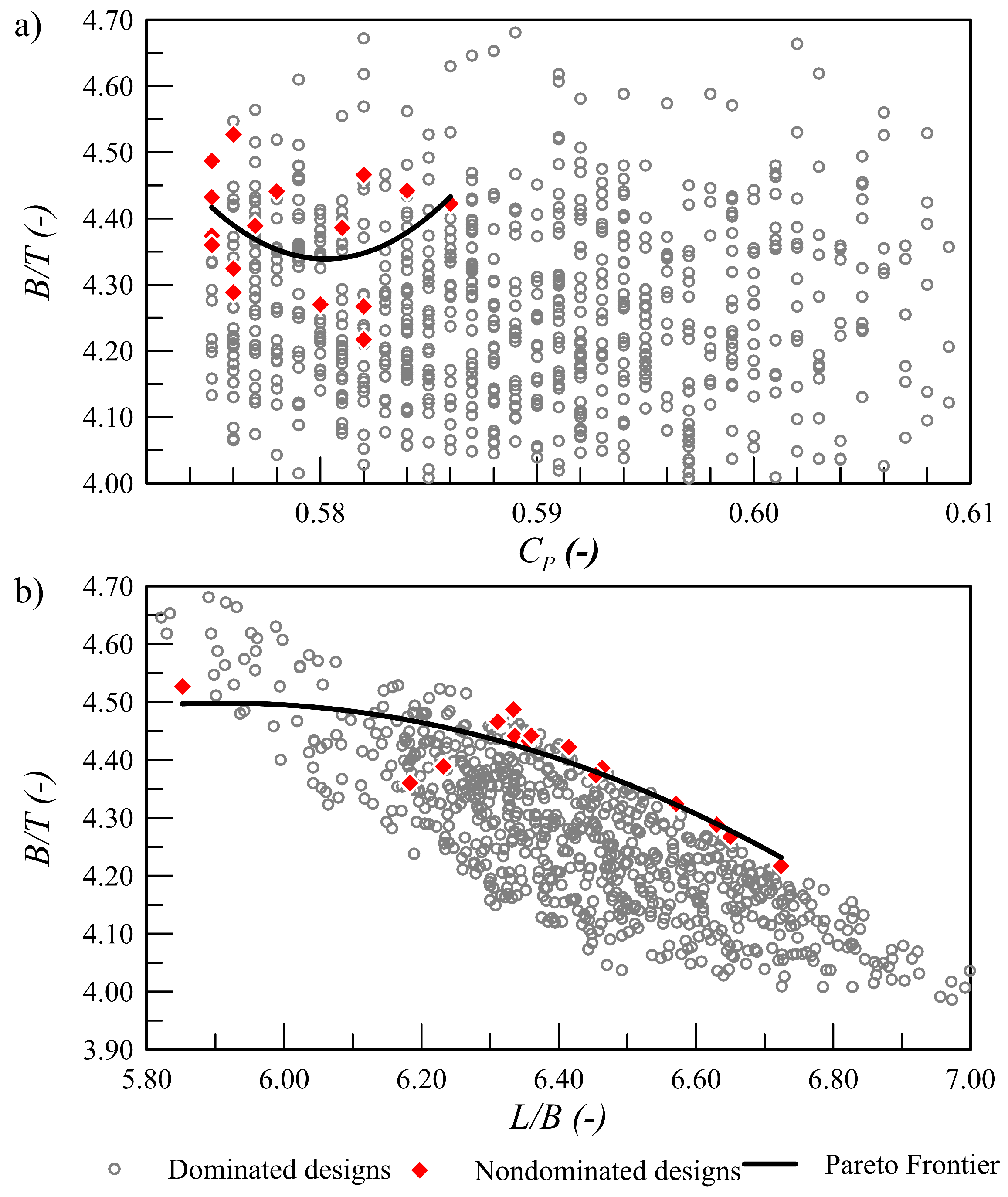
6. Results and Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CNG | Compressed Natural Gas carrier | |
| IMO | International Maritime Organisation | |
| LCTC | Large Car Truck Carrier | |
| PCTC | Pure Car Truck Carrier | |
| RoRo | Roll-on Roll-off | |
| L | (m) | Ship’s waterline Length |
| B | (m) | Ship’s maximum moulded Breadth |
| T | (m) | Ship’s Draught |
| D | (m) | Ship’s Depth |
| () | Area of the maximum section at the design draught | |
| () | Waterplane area at the design draught | |
| (-) | Maximum transverse section coefficient: | |
| (-) | Prismatic Coefficient: | |
| (-) | Block Coefficient: | |
| (-) | Waterplane area Coefficient: | |
| (-) | Vertical Prismatic Coefficient: | |
| ∇ | () | Volume of displacement |
| (m) | Geometric stability arm | |
| (m) | Vertical position of the centre of gravity above baseline | |
| (m) | Static stability arm | |
| (m) | Metacentric height | |
| (deg) | Heel angle | |
| (-) | number of cars per cycle | |
| (t/h) | Marine Diesel Oil consumption | |
| (-) | Power Coefficient | |
| (kW) | Shaft power at service speed | |
| () | water density | |
| V | (m/s) | annual average service speed |
| (t) | Water Ballast required at upright equilibrium position | |
| () | The vertical acceleration at the wheelhouse deck, caused by the | |
| effect of the head sea derived according to the Global Wave | ||
| Statistics [36] in the referred route | ||
| (-) | Turning Ability Index [37] | |
| (a/r) | Attained vs required value of Energy Efficiency Design Index | |
| (-) | Weather Criterion, the proportion of a and b areas, as defined in | |
| the Intact Stability Code [32] | ||
| (-) | Vibration grade | |
| (mmUSD) | Building cost | |
| (mmUSD) | Operative cost | |
| (USD/car 1000 nm) | Required Freight Rate per car, for 1,000 nautical miles | |
| (USD) | Net Present Value | |
| (USD/car) | Average Annual Cost |
References
- Pugh, S. Total Design: Integrated Methods for Successful Product Engineering; Addison-Wesley: Wokingham, UK, 1991. [Google Scholar]
- Vicenzutti, A.; Trincas, G.; Bucci, V.; Sulligoi, G.; Lipardi, G. Early-Stage design methodology for a multirole electric propelled surface combatant ship. In Proceedings of the 2019 IEEE Electric Ship Technologies Symposium (ESTS), Washington, DC, USA, 14–16 August 2019; pp. 97–105. [Google Scholar] [CrossRef]
- Trincas, G.; Mauro, F.; Braidotti, L.; Bucci, V. Handling the path from concept to preliminary ship design. In Proceedings of the Marine Design XIII, Helsinki, Finland, 10–14 June 2018; Volume 1, pp. 181–192. [Google Scholar]
- Žanić, V.; Grubišić, I.; Trincas, G. Multiattribute decision-making system based on random generation of non-dominated solutions: An application to fishing vessel design. In Proceedings of the 3rd International Symposium on Practical Design of Ships and Mobile Units—PRADS’92, Newcastle upon Tyne, UK, 17–22 May 1992; pp. 623–630. [Google Scholar]
- Trincas, G.; Grubišić, I.; Žanić, V. Comprehensive concept design of fast ro-ro ships by multiattribute decision making. In Proceedings of the 5th International Marine Design Conference—IMDC’94, Delft, The Netherlands, 24–27 May 1994; pp. 403–418. [Google Scholar]
- Žanić, V.; Čudina, P. Multiattribute Decision Making Methodology in the Concept Design of Tankers and Bulk Carriers. Brodogradnja 2009, 60, 19–43. [Google Scholar]
- Jafaryeganeh, H.; Ventura, M.; Guedes Soares, C. Application of multi-criteria decision making methods for selection of ship internal layout design from a Pareto optimal set. Ocean. Eng. 2020, 202, 107151. [Google Scholar] [CrossRef]
- Trincas, G. Optimal fleet composition for marine transport of compressed natural gas from stranded fields. In Proceedings of the 2nd INT NAM Conference, Istanbul, Turkey, 23–24 October 2014; pp. 25–38. [Google Scholar]
- Arias, C.; Herrador, J.; del Castillo, F. Intact and damage stability assessment for the preliminary design of a pasenger vessel. In Proceedings of the 8th International Conference on the Stability of Ships and Ocean Vehicles, STAB 2003, Madrid, Spain, 15–19 September 2003. [Google Scholar]
- Mauro, F.; Braidotti, L.; Trincas, G. A Model for Intact and Damage Stability Evaluation of CNG Ships during the Concept Design Stage. J. Mar. Sci. Eng. 2019, 7, 450. [Google Scholar] [CrossRef] [Green Version]
- Rodrigue, J.P. The Geography of Transport Systems; Routledge: New York, NY, USA, 2020. [Google Scholar]
- Trincas, G. Survey of design methods and illustration of multiattributes decision making system for concept ship design. In Proceedings of the MARIND 2001, Varna, Bulgaria, 1–4 October 2001. [Google Scholar]
- Mauro, F.; Braidotti, L.; Trincas, G. Effect of Different Propulsion Systems on CNG Ships Fleet Composition and Economic Effectiveness. In Proceedings of the 19th International Conference on Ship & Maritime Research, NAV 2018, Trieste, Italy, 20–22 June 2018. [Google Scholar] [CrossRef]
- Jafaryeganeh, H.; Ventura, M.; Guedes Soares, C. Effect of normalization techniques in multi-criteria decision making methods for the design of ship internal layout from a Pareto optimal set. Struct. Multidiscip. Optim. 2020, 62, 1849–1863. [Google Scholar] [CrossRef]
- Zadeh, L. Fuzzy Sets. Inf. Control. 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Bertram, V. Estimating Main Dimensions and Coefficients in Preliminary Ship Design. Schiffstechnik 1998, 45, 96–98. [Google Scholar]
- Alkan, A.; Trincas, G.; Nabergoj, R. Seakeeping metamodel of fast ro-ro ships: RSM or ANN technique? In Proceedings of the 12th International Congress of the International Maritime Association of the Mediterranean, IMAM 2005, Lisboa, Portugal, 26–30 September 2005; pp. 789–797. [Google Scholar]
- Mauro, F.; Braidotti, L.; Trincas, G. Determination of an optimal fleet for a CNG transportation scenario in the Mediterranean Sea. Brodogradnja 2019, 70, 1–23. [Google Scholar] [CrossRef]
- Novak, V. Fuzzy Sets and Their Applications; Adam Hilger: Bristol, UK, 1989. [Google Scholar]
- Buxton, I. Engineering Economics and Ship Design. In Engineering Economics and Ship Design; British Maritime Technology Ltd.: Feltham, UK, 1987; Chapter 2; pp. 79–95. [Google Scholar] [CrossRef]
- Benford, H. The Practical Application of Economics to merchant Ship Design. Mar. Technol. 1967, 4, 519–536. [Google Scholar]
- Buxton, I. Thirteen Graduate School; Chapter Cost Analysis as Applied to All Types of Marine Vehicles; West European Graduate Education in Marine Technology: Delft, The Netherlands, 1989. [Google Scholar]
- Carreyette, J. Preliminary Ship Cost Estimation. Trans. RINA 1977, 119, 235–258. [Google Scholar]
- Grubišić, I.; Žanić, V.; Trincas, G. Sensitivity of multiattribute design to economy enviroment: Shortsea Ro-Ro vessels. In Proceedings of the 6th International Marine Design Conference—IMDC’97, Espoo, Finland, 10–14 June 1997; pp. 201–216. [Google Scholar]
- Papanikolaou, A. Holistic ship design optimization. Comput. Aided Des. 2010, 42, 1028–1044. [Google Scholar] [CrossRef]
- Goss, R. Economic Criteria for Optimal Ships Designs. Trans. RINA 1965, 107, 581–596. [Google Scholar]
- Aspen, D.; Sparrevik, M.; Magerholm Fet, A. Review of methods for sustainability appraisals in ship acquisition. Environ. Syst. Decis. 2015, 35, 323–333. [Google Scholar] [CrossRef] [Green Version]
- Shetelig, H. Shipbuilding Cost Estimation: Parametric Approach; Technical Report; Norvegian Univeristy of Science and Technology: Trondheim, Norway, 2013. [Google Scholar]
- Chatterjee, S.; Simonoff, J.S. Multiple Linear Regression. In Handbook of Regression Analysis; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2013; Chapter 1; pp. 1–21. [Google Scholar] [CrossRef]
- Lai, T.L.; Robbins, H.; Wei, C.Z. Strong consistency of least squares estimates in multiple regression. Proc. Natl. Acad. Sci. USA 1978, 75, 3034–3036. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Harrell, F. Regression Modelling Strategies: With Application to Linear Models, Logistic Regression, and Survival Analysis; Springer: New York, NY, USA, 2001. [Google Scholar]
- IMO. Intact Stability Code; International Maritime Organization: London, UK, 2008. [Google Scholar]
- Chang, H. A data mining approach to dynamic multiple responses in Taguchi experimental design. Expert Syst. Appl. 2008, 35, 1095–1103. [Google Scholar] [CrossRef]
- Box, G.E.P.; Wilson, K.B. On the Experimental Attainment of Optimum Conditions. J. R. Stat. Soc. Ser. B Methodol. 1951, 13, 1–45. [Google Scholar] [CrossRef]
- Bialystocki, N.; Konovessis, D. On the estimation of ship’s fuel consumption and speed curve: A statistical approach. J. Ocean. Eng. Sci. 2016, 1, 157–166. [Google Scholar] [CrossRef] [Green Version]
- Hogben, N.; Dacunha, N.M.C.; Olliver, G. Global Wave Statistics; British Maritime Technology Ltd.: Feltham, UK, 1986. [Google Scholar]
- Nomoto, K.; Taguchi, T.; Honda, K.; Hirano, S. On the Steering Qualities of Ships. Int. Shipbuild. Prog. 1957, 4, 354–370. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| L | B | T | |||
|---|---|---|---|---|---|
| 215.00 | 30.00 | 7.75 | 0.575 | 0.685 | |
| 235.00 | 37.00 | 8.25 | 0.625 | 0.710 |
| Attribute | Description | Unit |
|---|---|---|
| Number of cars per cycle | (-) | |
| Fuel consumption | (t/h) | |
| Power coefficient | (-) | |
| Ballast | (t) | |
| Vertical acceleration at the wheelhouse | () | |
| Turning index | (-) | |
| Building cost | (mmUSD) | |
| Operative cost | (mmUSD) | |
| Required Freight Rate | (USD/car 1000 nm) |
| Independent Variable Short Name | |||||||
|---|---|---|---|---|---|---|---|
| 4.689 | 3.793 | 0.900 | 0.532 | 0.815 | 0.339 | 0.613 | |
| 6.811 | 5.207 | 0.980 | 0.851 | 0.960 | 0.500 | 0.839 |
| L [m] | ||||
|---|---|---|---|---|
| 190 | 5.750 | 4.500 | 0.940 | 0.650 |
| 200 | 5.750 | 4.500 | 0.940 | 0.800 |
| 205 | 5.750 | 4.500 | 0.940 | 0.500 |
| 210 | 5.750 | 4.500 | 0.980 | 0.650 |
| 215 | 5.750 | 4.500 | 0.900 | 0.650 |
| 220 | 5.750 | 4.500 | 0.968 | 0.756 |
| 225 | 5.750 | 4.500 | 0.968 | 0.544 |
| 195 | 5.750 | 4.500 | 0.912 | 0.756 |
| ID | ID | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 4.689 | 4.500 | 0.940 | 0.691 | 0.842 | 0.457 | 0.772 | 37 | 4.689 | 4.500 | 0.940 | 0.532 | 0.815 | 0.470 | 0.613 |
| 2 | 5.000 | 4.000 | 0.940 | 0.691 | 0.843 | 0.471 | 0.771 | 38 | 5.000 | 4.000 | 0.940 | 0.532 | 0.815 | 0.484 | 0.613 |
| 3 | 5.000 | 5.000 | 0.940 | 0.691 | 0.843 | 0.416 | 0.771 | 39 | 5.000 | 5.000 | 0.940 | 0.532 | 0.815 | 0.429 | 0.613 |
| 4 | 5.750 | 3.793 | 0.940 | 0.691 | 0.842 | 0.449 | 0.772 | 40 | 5.750 | 3.793 | 0.940 | 0.532 | 0.815 | 0.462 | 0.613 |
| 5 | 5.750 | 4.500 | 0.940 | 0.691 | 0.842 | 0.407 | 0.772 | 41 | 5.750 | 4.500 | 0.940 | 0.532 | 0.815 | 0.420 | 0.613 |
| 6 | 5.750 | 5.207 | 0.940 | 0.691 | 0.842 | 0.368 | 0.772 | 42 | 5.750 | 5.207 | 0.940 | 0.532 | 0.815 | 0.385 | 0.613 |
| 7 | 6.500 | 4.000 | 0.940 | 0.691 | 0.842 | 0.406 | 0.772 | 43 | 6.500 | 4.000 | 0.940 | 0.532 | 0.815 | 0.419 | 0.613 |
| 8 | 6.500 | 5.000 | 0.940 | 0.691 | 0.842 | 0.339 | 0.772 | 44 | 6.500 | 5.000 | 0.940 | 0.532 | 0.815 | 0.366 | 0.613 |
| 9 | 6.811 | 4.500 | 0.940 | 0.691 | 0.842 | 0.360 | 0.772 | 45 | 6.811 | 4.500 | 0.940 | 0.532 | 0.815 | 0.380 | 0.613 |
| 10 | 4.689 | 4.500 | 0.900 | 0.722 | 0.897 | 0.479 | 0.724 | 46 | 4.689 | 4.500 | 0.940 | 0.851 | 0.960 | 0.466 | 0.834 |
| 11 | 5.000 | 4.000 | 0.900 | 0.722 | 0.898 | 0.492 | 0.723 | 47 | 5.000 | 4.000 | 0.940 | 0.851 | 0.960 | 0.480 | 0.834 |
| 12 | 5.000 | 5.000 | 0.900 | 0.722 | 0.899 | 0.437 | 0.723 | 48 | 5.000 | 5.000 | 0.940 | 0.851 | 0.960 | 0.424 | 0.834 |
| 13 | 5.750 | 3.793 | 0.900 | 0.722 | 0.898 | 0.471 | 0.724 | 49 | 5.750 | 3.793 | 0.940 | 0.851 | 0.960 | 0.458 | 0.834 |
| 14 | 5.750 | 4.500 | 0.900 | 0.722 | 0.898 | 0.428 | 0.724 | 50 | 5.750 | 4.500 | 0.940 | 0.851 | 0.960 | 0.416 | 0.834 |
| 15 | 5.750 | 5.207 | 0.900 | 0.722 | 0.898 | 0.393 | 0.724 | 51 | 5.750 | 5.207 | 0.940 | 0.851 | 0.960 | 0.381 | 0.834 |
| 16 | 6.500 | 4.000 | 0.900 | 0.722 | 0.899 | 0.427 | 0.723 | 52 | 6.500 | 4.000 | 0.940 | 0.851 | 0.960 | 0.415 | 0.834 |
| 17 | 6.500 | 5.000 | 0.900 | 0.722 | 0.899 | 0.374 | 0.723 | 53 | 6.500 | 5.000 | 0.940 | 0.851 | 0.960 | 0.357 | 0.833 |
| 18 | 6.811 | 4.500 | 0.900 | 0.722 | 0.898 | 0.387 | 0.724 | 54 | 6.811 | 4.500 | 0.940 | 0.851 | 0.959 | 0.376 | 0.834 |
| 19 | 4.689 | 4.500 | 0.968 | 0.562 | 0.831 | 0.487 | 0.654 | 55 | 4.689 | 4.500 | 0.980 | 0.663 | 0.863 | 0.475 | 0.753 |
| 20 | 5.000 | 4.000 | 0.968 | 0.562 | 0.831 | 0.500 | 0.655 | 56 | 5.000 | 4.000 | 0.980 | 0.663 | 0.863 | 0.488 | 0.753 |
| 21 | 5.000 | 5.000 | 0.968 | 0.562 | 0.831 | 0.445 | 0.655 | 57 | 5.000 | 5.000 | 0.980 | 0.663 | 0.863 | 0.433 | 0.754 |
| 22 | 5.750 | 3.793 | 0.968 | 0.562 | 0.831 | 0.478 | 0.655 | 58 | 5.750 | 3.793 | 0.980 | 0.663 | 0.862 | 0.466 | 0.754 |
| 23 | 5.750 | 4.500 | 0.968 | 0.562 | 0.830 | 0.436 | 0.655 | 59 | 5.750 | 4.500 | 0.980 | 0.663 | 0.863 | 0.424 | 0.754 |
| 24 | 5.750 | 5.207 | 0.968 | 0.562 | 0.832 | 0.401 | 0.654 | 60 | 5.750 | 5.207 | 0.980 | 0.663 | 0.862 | 0.389 | 0.754 |
| 25 | 6.500 | 4.000 | 0.968 | 0.562 | 0.832 | 0.435 | 0.654 | 61 | 6.500 | 4.000 | 0.980 | 0.663 | 0.863 | 0.423 | 0.754 |
| 26 | 6.500 | 5.000 | 0.968 | 0.562 | 0.830 | 0.381 | 0.655 | 62 | 6.500 | 5.000 | 0.980 | 0.663 | 0.862 | 0.370 | 0.754 |
| 27 | 6.811 | 4.500 | 0.968 | 0.562 | 0.830 | 0.395 | 0.655 | 63 | 6.811 | 4.500 | 0.980 | 0.663 | 0.863 | 0.383 | 0.753 |
| 28 | 4.689 | 4.500 | 0.968 | 0.781 | 0.902 | 0.484 | 0.838 | 64 | 4.689 | 4.500 | 0.912 | 0.829 | 0.946 | 0.462 | 0.799 |
| 29 | 5.000 | 4.000 | 0.968 | 0.781 | 0.901 | 0.497 | 0.839 | 65 | 5.000 | 4.000 | 0.912 | 0.829 | 0.946 | 0.475 | 0.799 |
| 30 | 5.000 | 5.000 | 0.968 | 0.781 | 0.902 | 0.442 | 0.839 | 66 | 5.000 | 5.000 | 0.912 | 0.829 | 0.945 | 0.420 | 0.800 |
| 31 | 5.750 | 3.793 | 0.968 | 0.781 | 0.902 | 0.476 | 0.839 | 67 | 5.750 | 3.793 | 0.912 | 0.829 | 0.947 | 0.454 | 0.798 |
| 32 | 5.750 | 4.500 | 0.968 | 0.781 | 0.901 | 0.433 | 0.839 | 68 | 5.750 | 4.500 | 0.912 | 0.829 | 0.946 | 0.412 | 0.799 |
| 33 | 5.750 | 5.207 | 0.968 | 0.781 | 0.902 | 0.398 | 0.839 | 69 | 5.750 | 5.207 | 0.912 | 0.829 | 0.945 | 0.377 | 0.800 |
| 34 | 6.500 | 4.000 | 0.968 | 0.781 | 0.902 | 0.432 | 0.838 | 70 | 6.500 | 4.000 | 0.912 | 0.829 | 0.947 | 0.410 | 0.798 |
| 35 | 6.500 | 5.000 | 0.968 | 0.781 | 0.902 | 0.378 | 0.838 | 71 | 6.500 | 5.000 | 0.912 | 0.829 | 0.946 | 0.348 | 0.799 |
| 36 | 6.811 | 4.500 | 0.968 | 0.781 | 0.902 | 0.392 | 0.838 | 72 | 6.811 | 4.500 | 0.912 | 0.829 | 0.946 | 0.369 | 0.799 |
| (deg) | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | 45 | 50 | 55 | 60 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.153 | 0.205 | 0.228 | 0.033 | −0.064 | −0.483 | 1.066 | 1.030 | 0.351 | 0.332 | 0.285 | 0.175 | 0.069 | |
| 0.492 | 0.509 | 0.523 | 0.531 | 0.536 | 0.516 | 0.305 | −0.059 | −0.363 | −0.485 | −0.567 | −0.600 | 0.465 | |
| 0.000 | 0.000 | 0.000 | 0.032 | 0.050 | −3.342 | 0.355 | 0.286 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| −0.197 | −0.270 | −0.426 | 0.000 | 0.000 | −20.111 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | −0.581 | 0.000 | |
| 0.354 | 0.443 | 0.350 | 0.252 | 0.225 | 8.064 | 0.904 | 0.543 | 0.000 | 0.000 | 0.000 | 0.265 | 0.203 | |
| 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | −0.210 | −0.589 | −0.932 | −1.005 | −1.034 | −1.009 | 0.000 | |
| −0.606 | −0.557 | −0.231 | −0.510 | −0.445 | 12.222 | −1.100 | −0.785 | −0.378 | −0.385 | −0.375 | 0.000 | −0.677 | |
| 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | −0.107 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | −0.858 | −0.501 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.000 | 0.000 | 0.777 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | −1.038 | −0.764 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | −0.257 | −0.560 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| −0.116 | −0.147 | −1.398 | 0.000 | 0.091 | 0.783 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | −0.066 | |
| 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | −0.046 | −0.129 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | −0.163 | −0.459 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| −0.048 | 0.000 | 0.000 | 0.038 | 0.057 | 0.059 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | −0.065 | |
| 0.000 | 0.000 | 0.000 | −0.370 | −0.501 | −0.443 | −0.444 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | −0.061 | −0.121 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | −1.101 | −0.269 | −0.543 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.000 | 0.000 | −1.336 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.000 | 0.000 | 1.741 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | −0.140 | −0.400 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.119 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.042 | 0.084 | 0.125 | 0.167 | 0.209 | 0.250 | 0.283 | 0.303 | 0.313 | 0.319 | 0.320 | 0.318 | 0.477 | |
| 0.059 | 0.114 | 0.165 | 0.212 | 0.253 | 0.288 | 0.319 | 0.345 | 0.367 | 0.385 | 0.398 | 0.411 | 0.702 | |
| 0.033 | 0.047 | 0.012 | 0.136 | 0.031 | 0.043 | 0.228 | 1.066 | 0.289 | 0.361 | 0.577 | 0.399 | 0.030 | |
| 0.998 | 0.997 | 0.999 | 0.991 | 0.998 | 0.997 | 0.981 | 0.911 | 0.979 | 0.977 | 0.964 | 0.972 | 0.998 | |
| 0.998 | 0.997 | 0.999 | 0.990 | 0.998 | 0.997 | 0.978 | 0.905 | 0.973 | 0.974 | 0.962 | 0.971 | 0.998 | |
(m) | B (m) | T (m) | (t) | |||||||||
| 15 | 220.478 | 34.934 | 7.822 | 34,790 | 6.311 | 4.466 | 0.561 | 0.582 | 0.707 | 0.793 | 8762 | 15 |
| 22 | 225.647 | 33.932 | 7.946 | 35,033 | 6.650 | 4.270 | 0.560 | 0.580 | 0.690 | 0.811 | 9176 | 22 |
| 183 | 225.543 | 34.018 | 7.933 | 34,798 | 6.630 | 4.288 | 0.556 | 0.576 | 0.703 | 0.790 | 9176 | 183 |
| 184 | 222.772 | 35.169 | 7.839 | 35,049 | 6.334 | 4.487 | 0.555 | 0.575 | 0.691 | 0.803 | 8969 | 184 |
| 213 | 227.721 | 34.242 | 8.025 | 36,096 | 6.650 | 4.267 | 0.561 | 0.582 | 0.706 | 0.794 | 9176 | 213 |
| 226 | 219.866 | 34.698 | 7.813 | 34,201 | 6.336 | 4.441 | 0.558 | 0.578 | 0.700 | 0.796 | 8762 | 226 |
| 343 | 221.618 | 34.866 | 7.866 | 34,683 | 6.356 | 4.432 | 0.555 | 0.575 | 0.710 | 0.781 | 8969 | 343 |
| 347 | 224.711 | 34.198 | 7.909 | 34,721 | 6.571 | 4.324 | 0.555 | 0.576 | 0.687 | 0.808 | 8969 | 347 |
| 410 | 225.051 | 35.385 | 7.967 | 36,766 | 6.360 | 4.442 | 0.563 | 0.584 | 0.705 | 0.798 | 9176 | 410 |
| 414 | 220.530 | 34.380 | 7.775 | 34,289 | 6.415 | 4.422 | 0.565 | 0.586 | 0.703 | 0.804 | 8762 | 414 |
| 420 | 223.209 | 34.537 | 7.875 | 34,962 | 6.463 | 4.386 | 0.560 | 0.581 | 0.707 | 0.792 | 8969 | 420 |
| 430 | 228.178 | 35.354 | 8.082 | 37,193 | 6.454 | 4.374 | 0.554 | 0.575 | 0.700 | 0.792 | 9176 | 430 |
| 543 | 216.833 | 34.791 | 7.928 | 34,204 | 6.232 | 4.389 | 0.556 | 0.577 | 0.709 | 0.784 | 8762 | 543 |
| 600 | 216.021 | 36.913 | 7.808 | 35,574 | 5.852 | 4.527 | 0.555 | 0.576 | 0.689 | 0.806 | 9117 | 600 |
| 706 | 216.350 | 34.990 | 8.026 | 34,661 | 6.183 | 4.360 | 0.554 | 0.575 | 0.708 | 0.783 | 8762 | 706 |
| 724 | 227.310 | 33.808 | 8.016 | 35,550 | 6.724 | 4.217 | 0.561 | 0.582 | 0.685 | 0.818 | 9176 | 724 |
(t/h) | (a/r) | (t) | (m/s2) | (USD/car 1000 nm) | ||||||||
| (mmUSD) | ||||||||||||
| 15 | 2.413 | 0.559 | 1.414 | 4426 | 1.454 | 0.47 | 0.149 | 0.863 | 66.83 | 13.64 | 64.691 | 15 |
| 22 | 2.414 | 0.560 | 1.411 | 4193 | 1.549 | 0.50 | 0.159 | 0.538 | 66.90 | 13.72 | 63.857 | 22 |
| 183 | 2.415 | 0.562 | 1.400 | 3942 | 1.377 | 0.48 | 0.159 | 0.612 | 66.94 | 13.73 | 63.988 | 183 |
| 184 | 2.413 | 0.556 | 1.415 | 4233 | 1.516 | 0.47 | 0.152 | 0.538 | 67.29 | 13.69 | 65.021 | 184 |
| 213 | 2.413 | 0.551 | 1.392 | 5039 | 1.636 | 0.49 | 0.161 | 0.502 | 67.38 | 13.73 | 63.409 | 213 |
| 226 | 2.414 | 0.566 | 1.416 | 3955 | 1.444 | 0.47 | 0.150 | 0.915 | 66.61 | 13.64 | 66.076 | 226 |
| 343 | 2.414 | 0.562 | 1.402 | 4050 | 1.453 | 0.46 | 0.152 | 0.902 | 66.96 | 13.69 | 64.847 | 343 |
| 347 | 2.414 | 0.562 | 1.413 | 4096 | 1.441 | 0.49 | 0.158 | 0.567 | 66.94 | 13.68 | 64.834 | 347 |
| 410 | 2.497 | 0.581 | 1.402 | 5454 | 1.616 | 0.48 | 0.153 | 0.555 | 68.29 | 14.05 | 64.319 | 410 |
| 414 | 2.413 | 0.562 | 1.425 | 4070 | 1.440 | 0.48 | 0.150 | 0.669 | 66.47 | 13.64 | 66.384 | 414 |
| 420 | 2.413 | 0.558 | 1.408 | 4314 | 1.451 | 0.48 | 0.154 | 0.674 | 66.95 | 13.68 | 64.832 | 420 |
| 430 | 2.497 | 0.580 | 1.387 | 5728 | 1.618 | 0.47 | 0.159 | 0.626 | 68.72 | 14.05 | 64.751 | 430 |
| 543 | 2.416 | 0.571 | 1.402 | 4173 | 1.449 | 0.45 | 0.149 | 0.997 | 66.33 | 13.64 | 66.523 | 543 |
| 600 | 2.497 | 0.590 | 1.426 | 4465 | 1.498 | 0.44 | 0.140 | 0.987 | 68.02 | 14.03 | 64.458 | 600 |
| 706 | 2.414 | 0.570 | 1.396 | 4634 | 1.432 | 0.44 | 0.149 | 0.999 | 66.42 | 13.64 | 66.067 | 706 |
| 724 | 2.413 | 0.557 | 1.410 | 4656 | 1.553 | 0.51 | 0.162 | 0.508 | 67.04 | 13.72 | 63.529 | 724 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Degan, G.; Braidotti, L.; Marinò, A.; Bucci, V. LCTC Ships Concept Design in the North Europe- Mediterranean Transport Scenario Focusing on Intact Stability Issues. J. Mar. Sci. Eng. 2021, 9, 278. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9030278
Degan G, Braidotti L, Marinò A, Bucci V. LCTC Ships Concept Design in the North Europe- Mediterranean Transport Scenario Focusing on Intact Stability Issues. Journal of Marine Science and Engineering. 2021; 9(3):278. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9030278
Chicago/Turabian StyleDegan, Germano, Luca Braidotti, Alberto Marinò, and Vittorio Bucci. 2021. "LCTC Ships Concept Design in the North Europe- Mediterranean Transport Scenario Focusing on Intact Stability Issues" Journal of Marine Science and Engineering 9, no. 3: 278. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9030278