
Revisit of a Case Study of Spilled Oil Slicks Caused by the Sanchi Accident (2018) in the East China Sea


Abstract
:1. Introduction
2. Dataset Collection
3. Method and Results
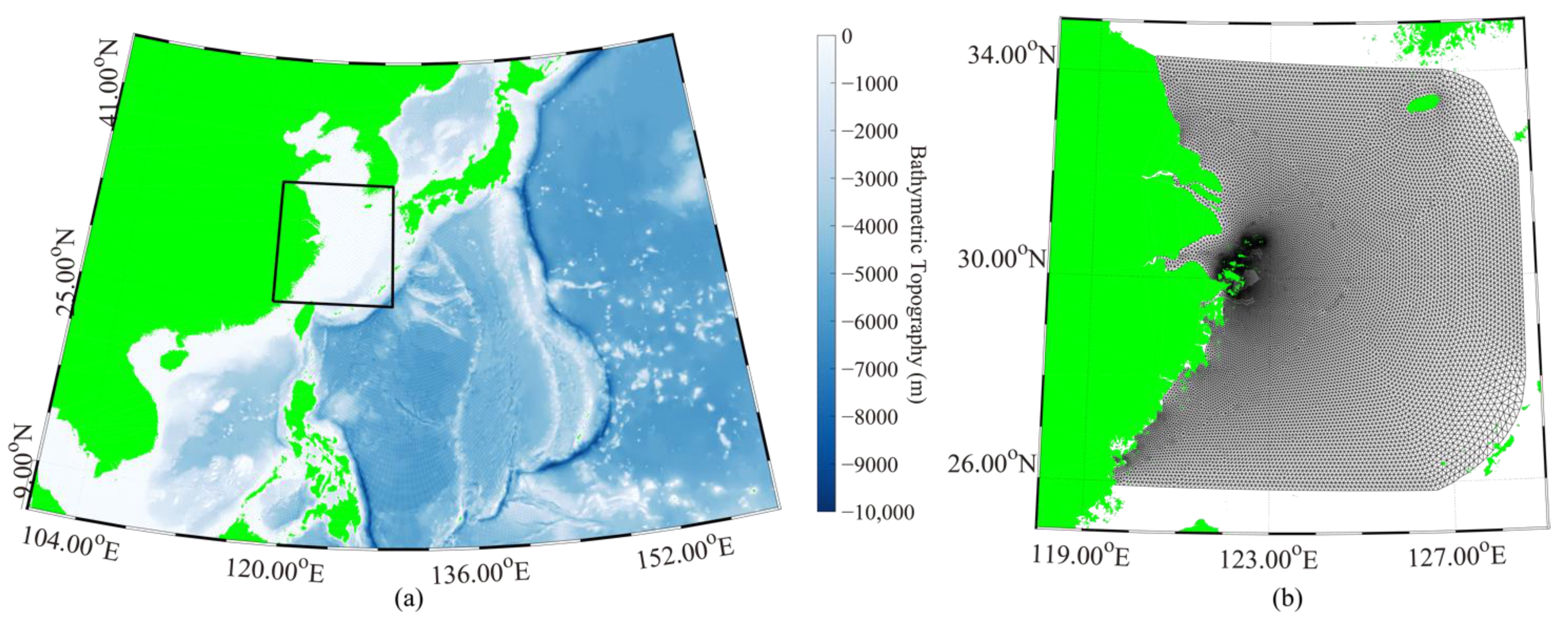
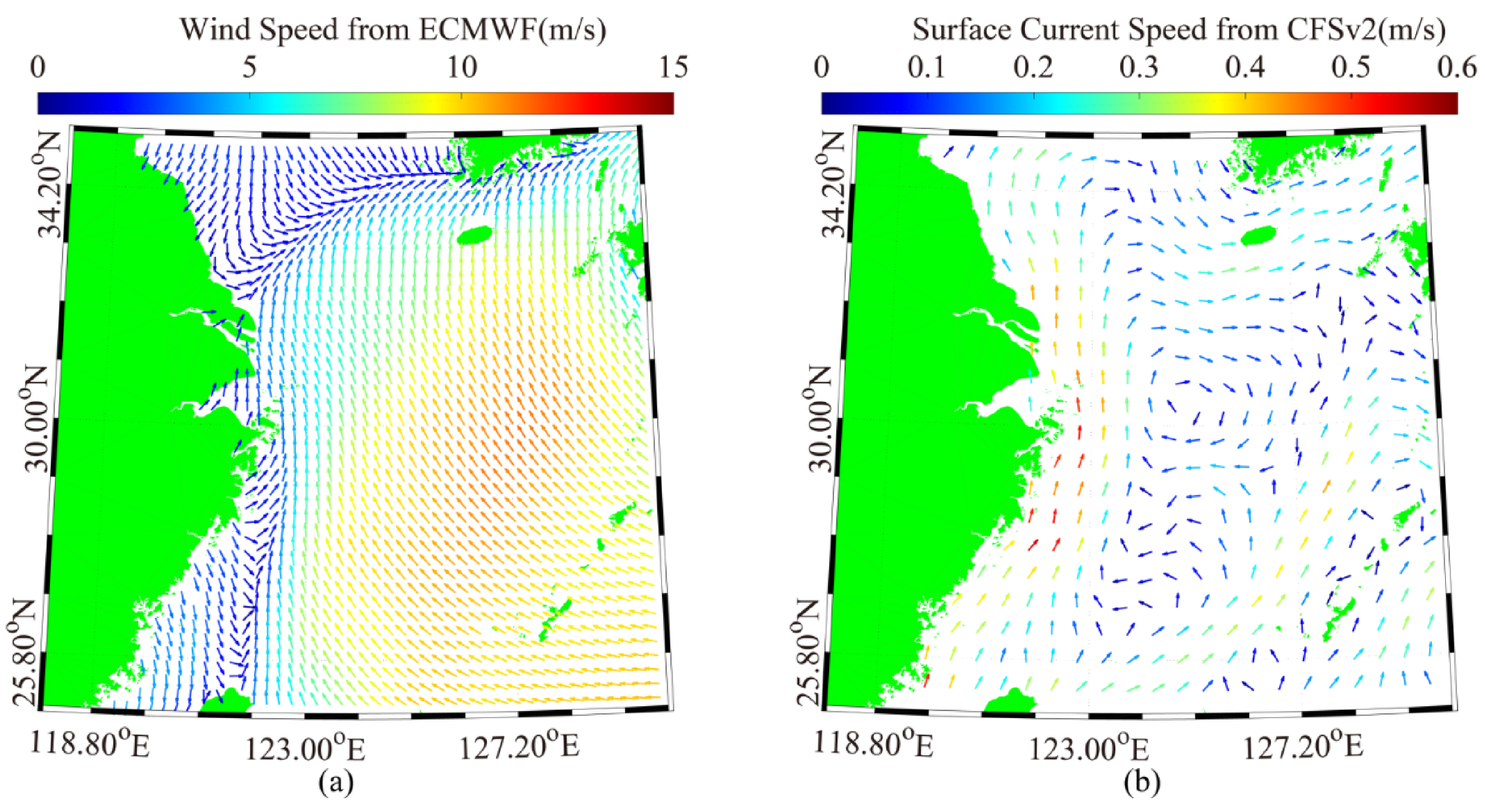
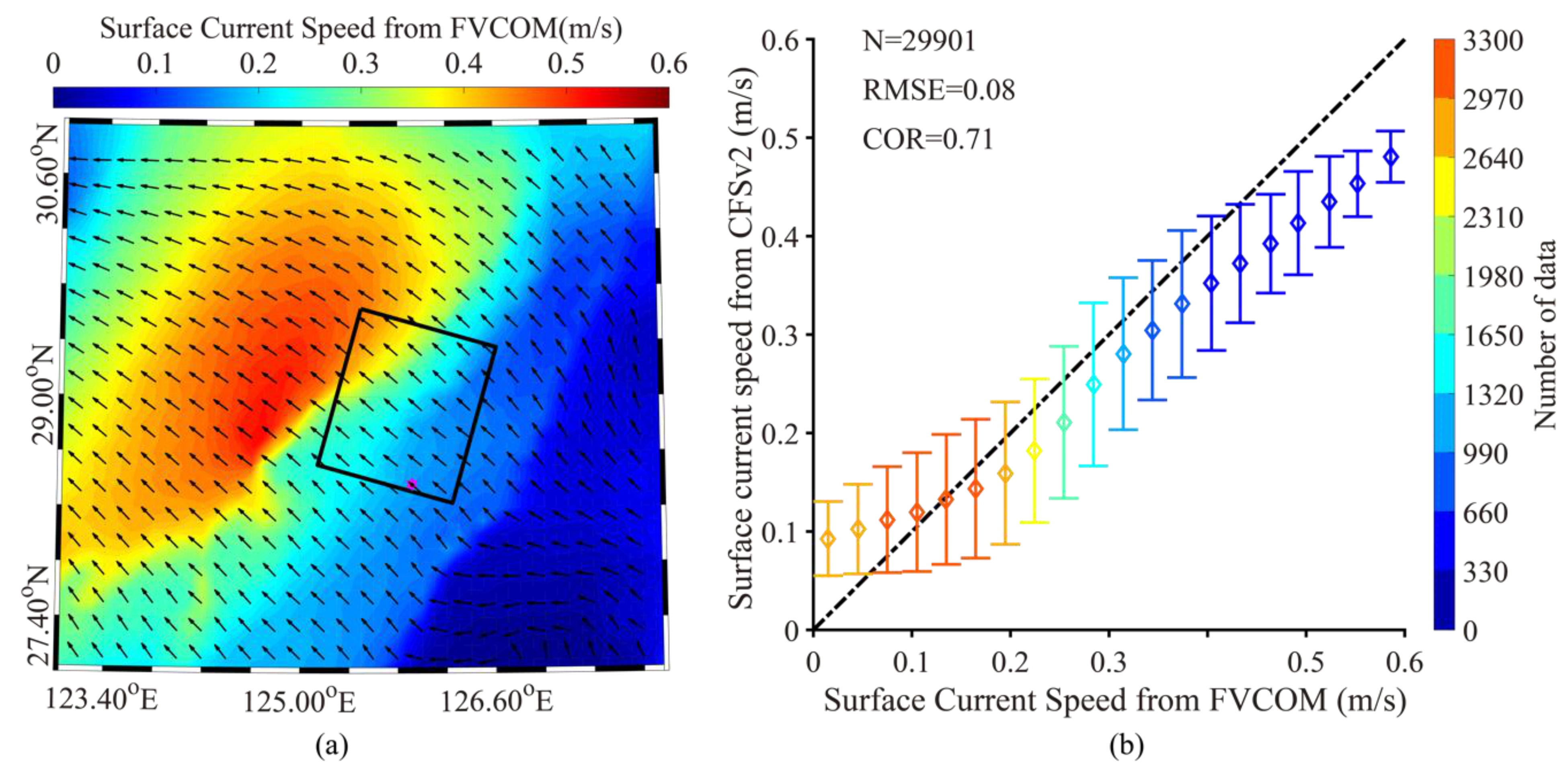
3.1. Simulation of Sea-Surface Current
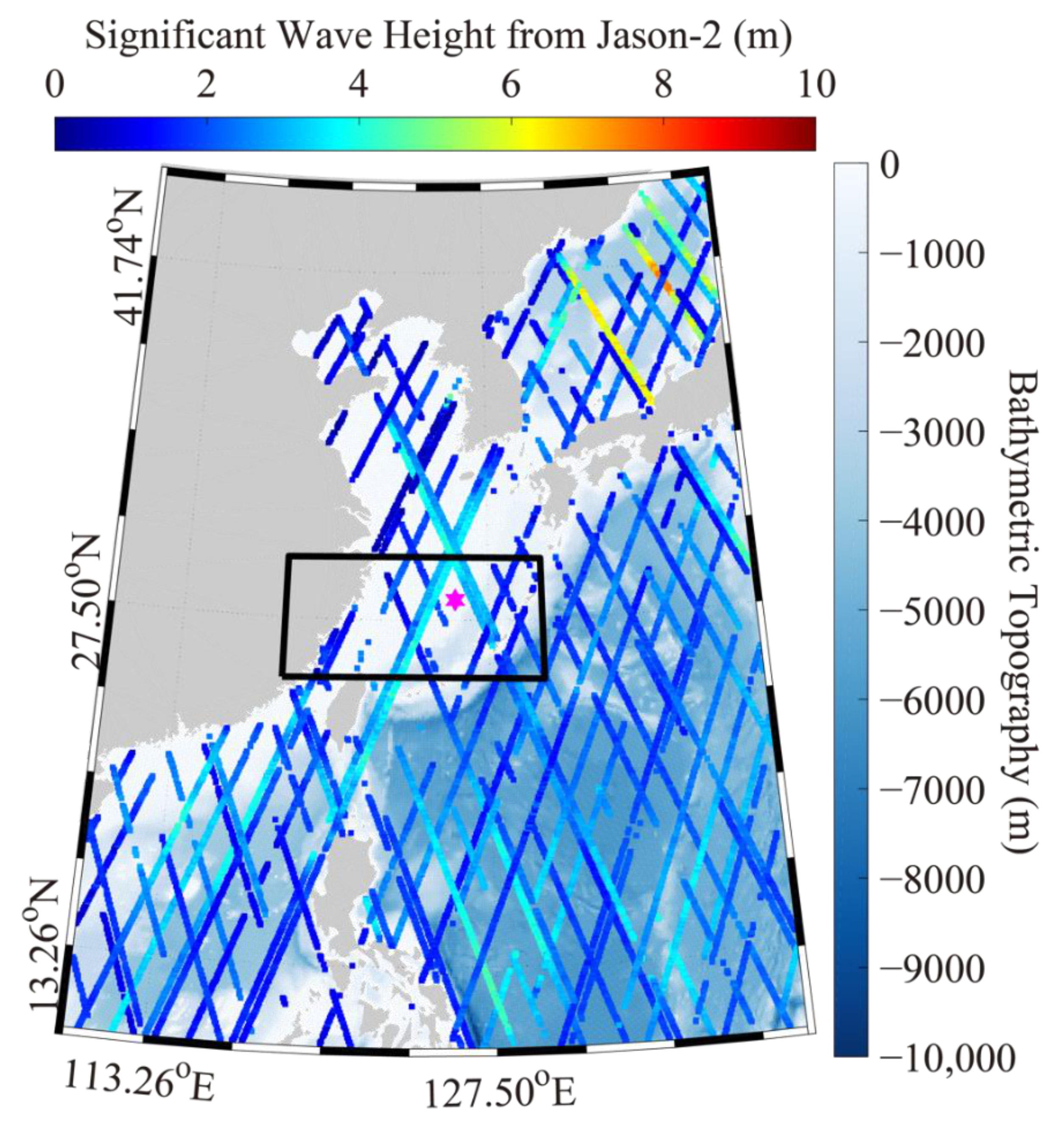
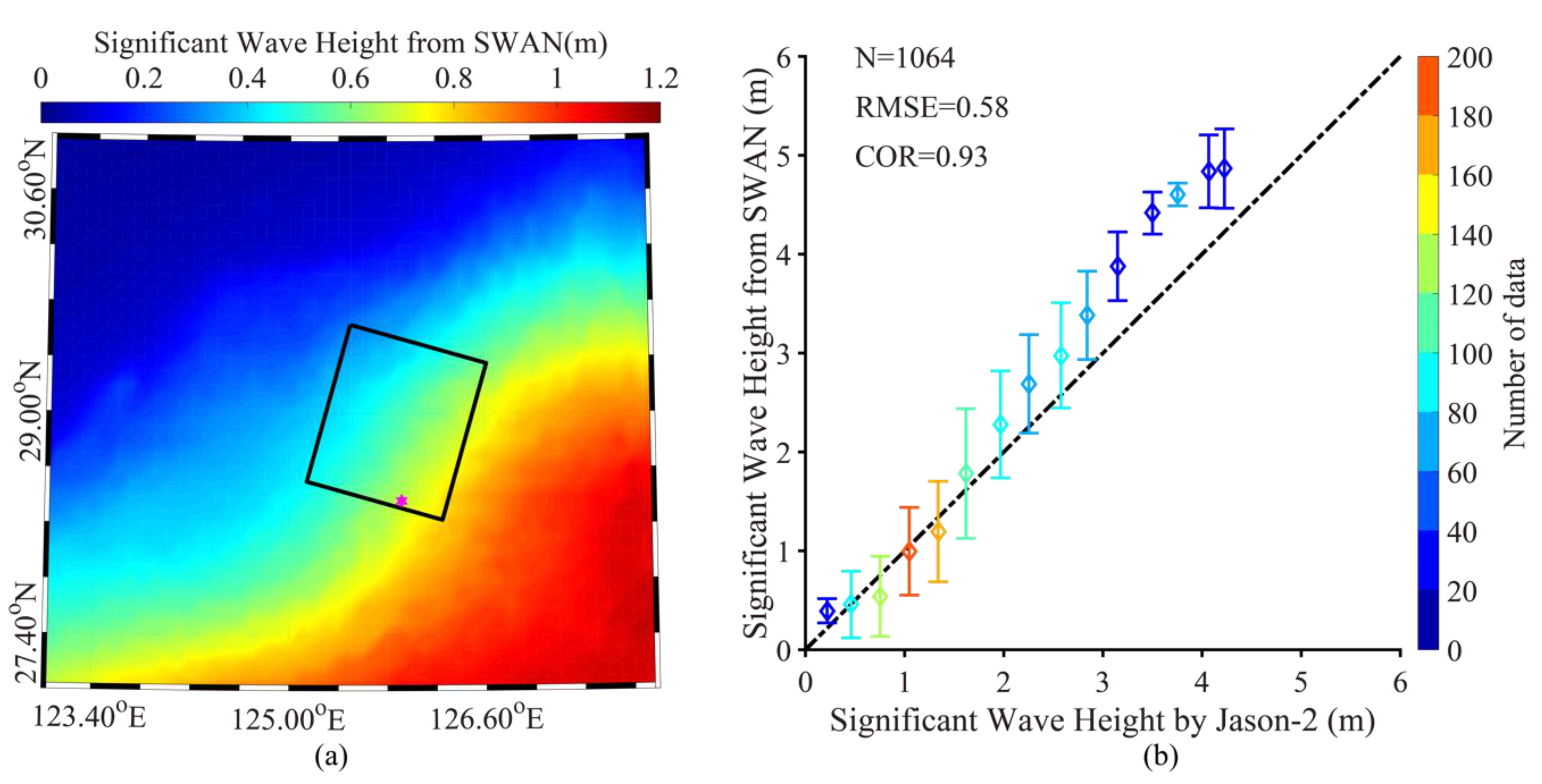
3.2. Simulation of Sea-Surface Wave
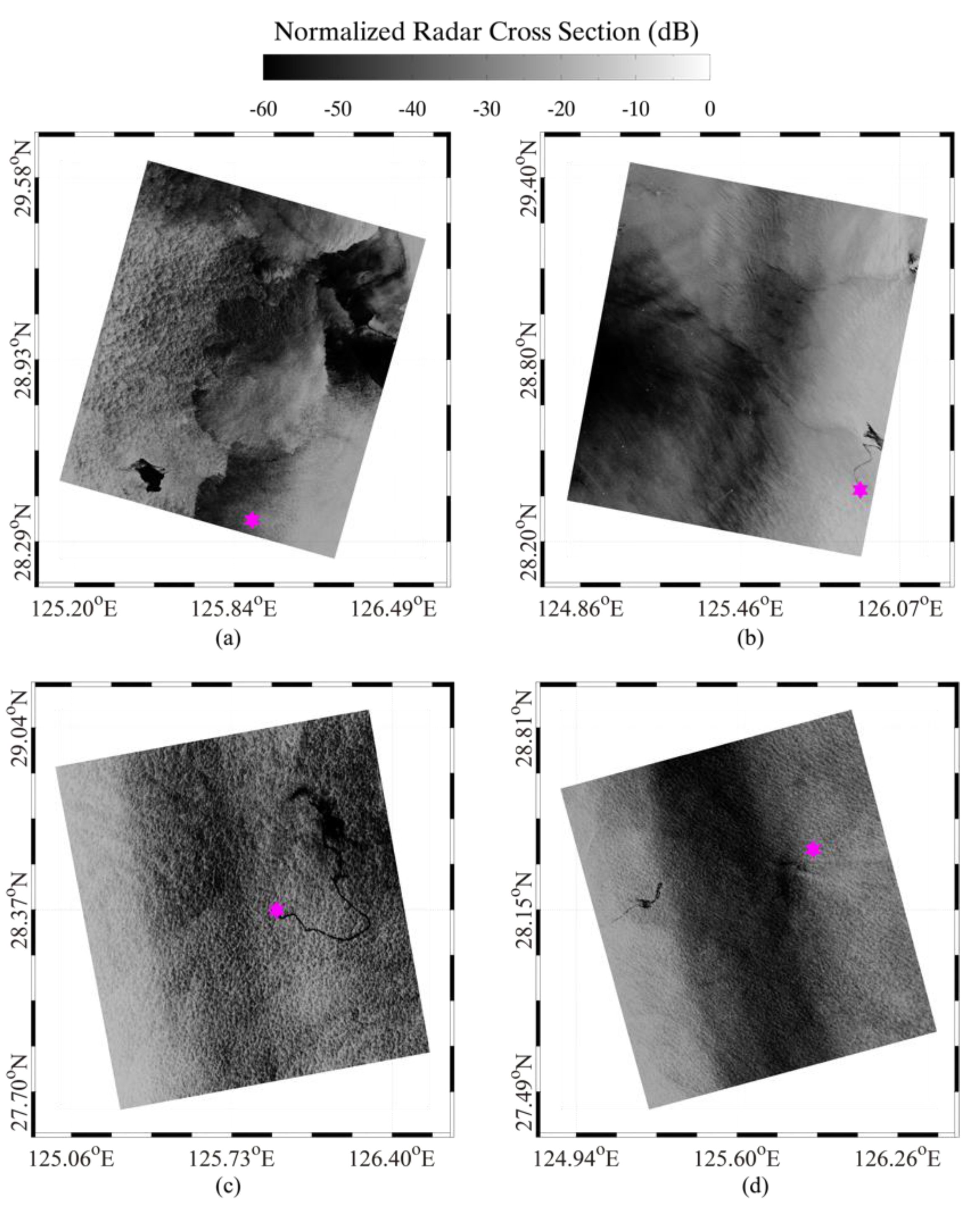
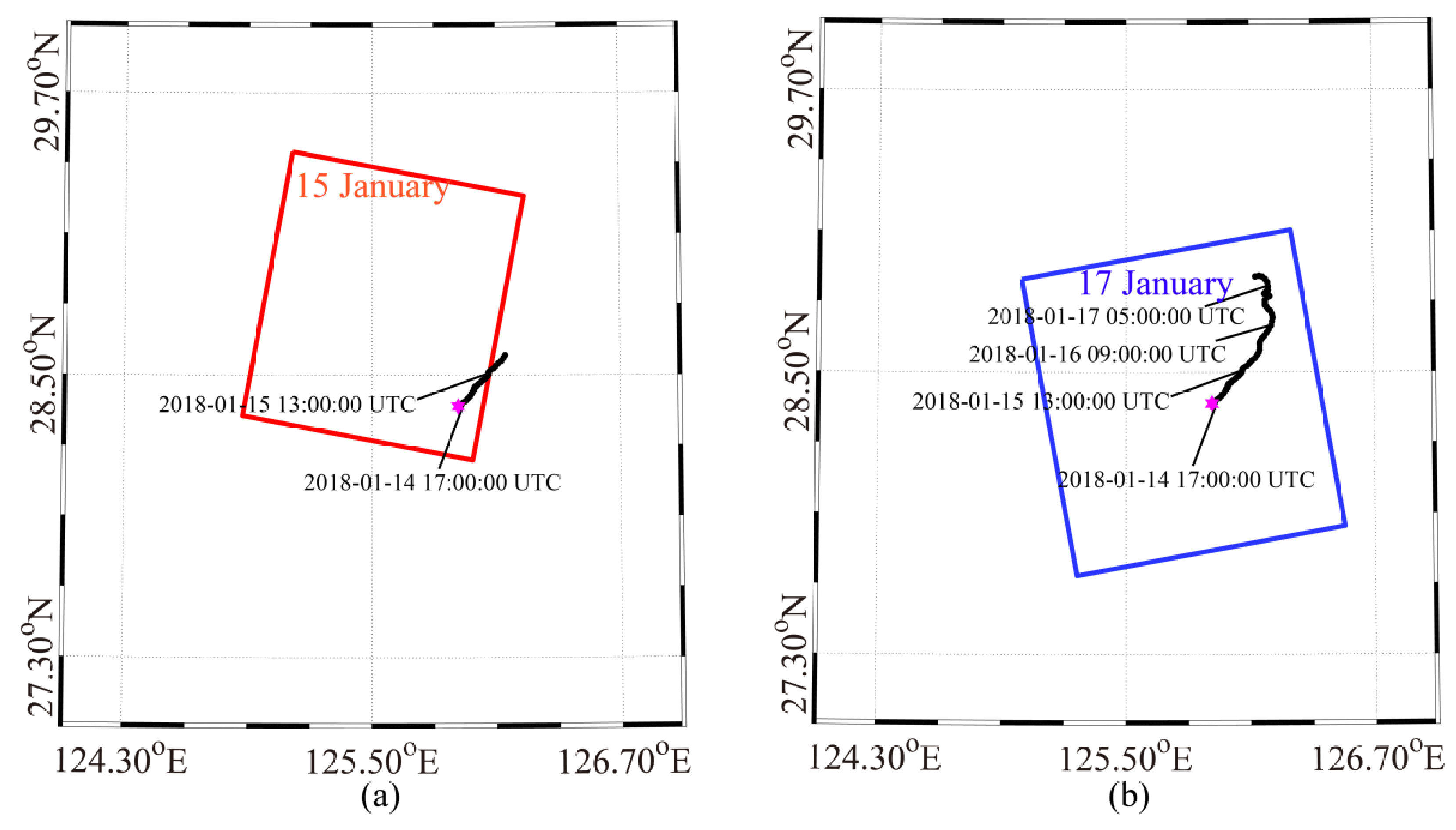
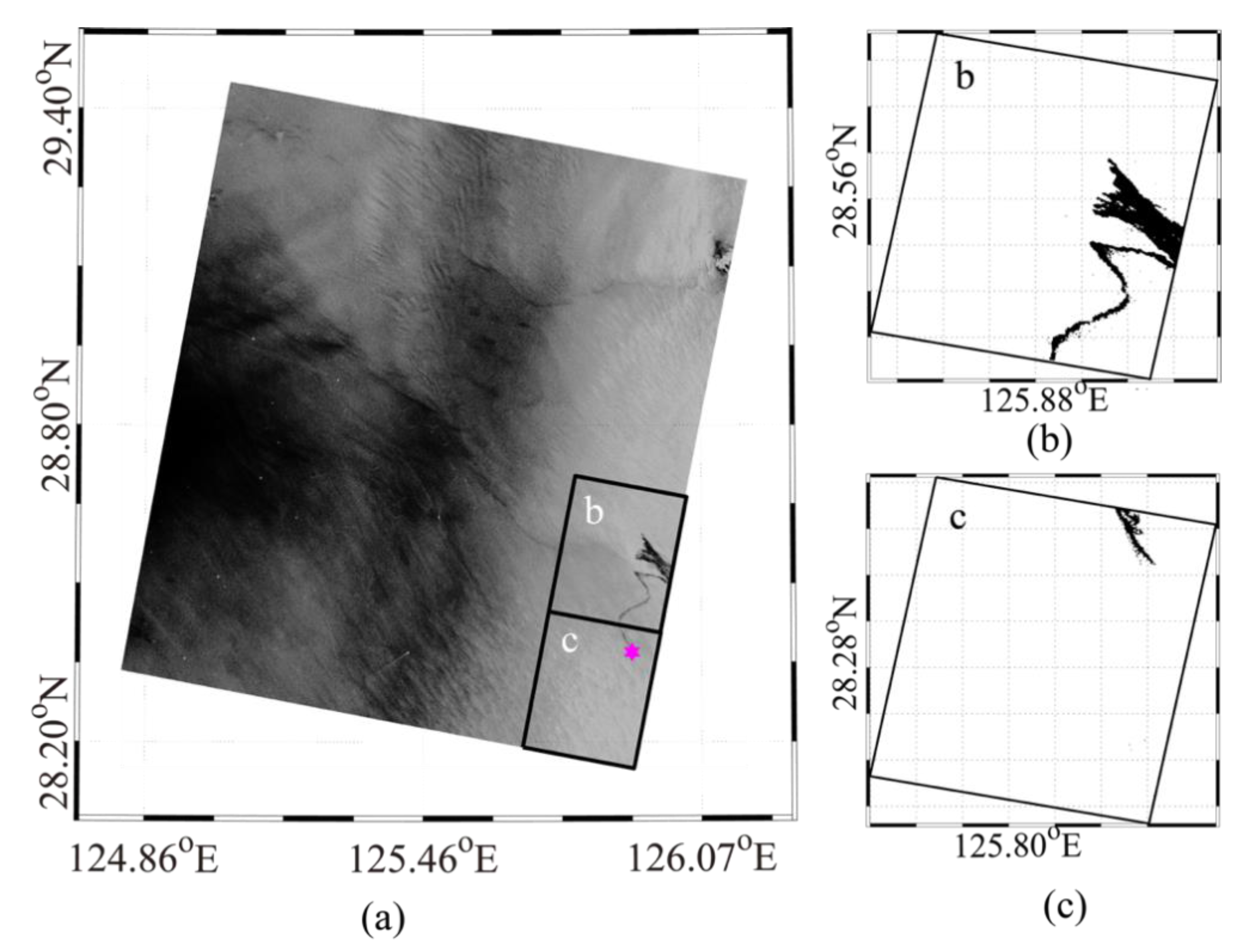
3.3. Simulation of Spilled Oil-Slicks
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
- (1)
- Any scattering unit in a pixel size will not affect other scattering units to a large extent.
- (2)
- The phase of each scattering unit obeys the uniform distribution on [-π, π].
- (3)
- The phase random variables of each scattering unit are not related to each other, and some related scattering units naturally form a scattering center.
- (4)
- There is no correlation between the amplitude random variable and the phase random variable of each scattering unit.
References
- Qiao, F.L.; Wang, G.; Yin, L.; Zeng, K.; Zhang, Y.; Zhang, M.; Xiao, B.; Jiang, S.; Chen, H.; Chen, G. Modelling oil trajectories and potentially contaminated areas from the Sanchi oil spill. Sci. Total Environ. 2019, 685, 856–866. [Google Scholar] [CrossRef]
- Berry, A.; Dabrowski, T.; Lyons, K. The oil spill model OILTRANS and its application to the Celtic sea. Mar. Pollut. Bull. 2012, 64, 2489–2501. [Google Scholar] [CrossRef] [Green Version]
- Guo, W.; Wu, G.; Jiang, M.; Xu, T.; Yang, Z.; Xie, M.; Chen, X. A modified probabilistic oil spill model and its application to the Dalian new port accident. Ocean Eng. 2016, 121, 291–300. [Google Scholar] [CrossRef]
- Fingas, M.; Fieldhouse, B. Formation of water-in-oil emulsions and application to oil spill modelling. J. Hazard. Mater. 2004, 107, 37–50. [Google Scholar] [CrossRef] [PubMed]
- Mccay, D.F. Development and application of damage assessment modeling: Example assessment for the north cape oil spill. Mar. Pollut. Bull. 2013, 47, 341–359. [Google Scholar] [CrossRef]
- Yapa, P.D.; Shen, H.T. Modelling river oil spills: A review. J. Hydraul. Res. 1994, 32, 765–782. [Google Scholar] [CrossRef]
- Fingas, M.F. A literature review of the physics and predictive modelling of oil spill evaporation. J. Hazard. Mater. 1995, 42, 157–175. [Google Scholar] [CrossRef]
- Afenyo, M.; Veitch, B.; Khan, F. A state-of-the-art review of fate and transport of oil spills in open and ice-covered water. Ocean Eng. 2016, 119, 233–248. [Google Scholar] [CrossRef]
- Kasimu, A.; Dong, J.; Bian, Y.; Wu, D. Simulate oil spill weathering with system dynamic model. Front. Eng. Man. 2020. [Google Scholar] [CrossRef]
- Saha, A.; Nikova, A.; Venkataraman, P.; John, V.; Bose, A. Oil emulsification using surface-tunable carbon black particles. ACS Appl. Mater. Inter. 2013, 5, 3094–3100. [Google Scholar] [CrossRef]
- Elliott, A.; Hurford, N.; Penn, C. Shear diffusion and the spreading of oil slicks. Mar. Pollut. Bull. 1986, 17, 308–313. [Google Scholar] [CrossRef]
- Guo, W.; Wang, Y. A numerical oil spill model based on a hybrid method. Mar. Pollut. Bull. 2009, 58, 726–734. [Google Scholar] [CrossRef] [PubMed]
- Stopa, J.E.; Cheung, K.F. Intercomparison of wind and wave data from the ECMWF reanalysis interim and the NCEP climate forecast system reanalysis. Ocean Model. 2014, 75, 65–83. [Google Scholar] [CrossRef]
- Yang, Z.H.; Shao, W.Z.; Ding, Y.Y.; Shi, J.; Ji, Q.Y. Wave simulation by the SWAN model and FVCOM considering the sea-water level around the Zhoushan islands. J. Mar. Sci. Eng. 2020, 8, 783. [Google Scholar] [CrossRef]
- Sheng, Y.X.; Shao, W.Z.; Li, S.Q.; Zhang, Y.M.; Yang, H.W.; Zuo, J.C. Evaluation of typhoon waves simulated by WaveWatch-III model in shallow waters around Zhoushan Islands. J. Ocean Univ. China 2019, 18, 365–375. [Google Scholar] [CrossRef]
- Shao, W.Z.; Sheng, Y.X.; Li, H.; Shi, J.; Ji, Q.Y.; Tan, W.; Zuo, J.C. Analysis of wave distribution simulated by WAVEWATCH-III model in typhoons passing Beibu Gulf, China. Atmosphere 2018, 9, 265. [Google Scholar] [CrossRef] [Green Version]
- Hu, Y.Y.; Shao, W.Z.; Shi, J.; Sun, J.; Ji, Q.Y.; Cai, L.N. Analysis of the typhoon wave distribution simulated in WAVEWATCH-III model in the context of Kuroshio and wind-induced current. J. Oceanol. Limn. 2020, 38, 1692–1710. [Google Scholar] [CrossRef]
- Huang, S.; Liu, J.; Cai, L.N.; Zhou, M.R.; Bu, J.; Xu, J. Satellites HY-1C and Landsat 8 combined to observe the influence of bridge on sea surface temperature and suspended sediment concentration in Hangzhou Bay, China. Water 2020, 12, 2595. [Google Scholar] [CrossRef]
- Cai, L.N.; Bu, J.; Tang, D.L.; Zhou, M.R.; Yao, R.; Huang, S. Geosynchronous Satellite GF-4 Observations of Chlorophyll-a Distribution Details in the Bohai Sea, China. Sensors 2020, 20, 5471. [Google Scholar] [CrossRef] [PubMed]
- Yao, R.; Cai, L.N.; Liu, J.; Zhou, M.R. GF-1 Satellite observations of suspended sediment injection of Yellow River Estuary, China. Remote Sens. 2020, 12, 3126. [Google Scholar] [CrossRef]
- Nagaraja Rao, C.; Stowe, L.; Mcclain, E. Remote sensing of aerosols over the oceans using AVHRR data theory, practice and applications. Int. J. Remote Sens. 1988, 10, 743–749. [Google Scholar] [CrossRef]
- Esaias, W.; Abbott, M.; Barton, I.; Brown, O.; Minnett, P. An overview of MODIS capabilities for ocean science observations. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1250–1265. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.F.; Wu, Q.; Chen, G. Validation of HY-2A remotely sensed wave heights against buoy data and Jason-2 altimeter measurements. J. Atmos. Ocean. Tech. 2015, 32, 1270–1280. [Google Scholar] [CrossRef]
- Quilfen, Y.; Bentamy, A.; Elfouhaily, T.; Katsaros, K.; Tournadre, J. Observation of tropical cyclones by high-resolution scatterometry. J. Geophys. Res. 1998, 103, 7767–7786. [Google Scholar] [CrossRef]
- Alpers, W.; Ross, D.B.; Rufenach, C.L. On the detectability of ocean surface waves by real and synthetic radar. J. Geophys. Res. 1981, 86, 10529–10546. [Google Scholar] [CrossRef]
- Li, X.F.; Zhang, J.A.; Yang, X.F.; Pichel, W.G.; DeMaria, M.; Long, D.; Li, Z.W. Tropical cyclone morphology from spaceborne synthetic aperture radar. Bull. Am. Meteorol. Soc. 2013, 94, 215–230. [Google Scholar] [CrossRef] [Green Version]
- Espedal, H. Satellite SAR oil spill detection using wind speed history information. Int. J. Remote Sens. 1999, 20, 49–65. [Google Scholar] [CrossRef]
- Migliaccio, M.; Gambardella, A.; Tranfaglia, M. SAR polarimetry to observe oil spills. IEEE Trans. Geosci. Remote Sens. 2007, 45, 506–511. [Google Scholar] [CrossRef]
- Taghadosi, M.; Hasanlou, M.; Eftekhari, K. Soil salinity mapping using dual-polarized SAR Sentinel-1 imagery. Int. J. Remote Sens. 2018, 40, 237–252. [Google Scholar] [CrossRef]
- Santi, F.; Luciani, G.; Bresciani, M.; Giardino, C.; Carolis, G. Synergistic use of synthetic aperture radar and optical imagery to monitor surface accumulation of cyanobacteria in the Curonian Lagoon. J. Mar. Sci. Eng. 2019, 7, 461. [Google Scholar] [CrossRef] [Green Version]
- Zeng, K.; Wang, Y. A deep convolutional neural network for oil spill detection from spaceborne SAR images. Remote Sens. 2020, 12, 1015. [Google Scholar] [CrossRef] [Green Version]
- Shirvany, R. Ship and oil-spill detection using the degree of polarization in linear and hybrid/compact dual-pol SAR. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2012, 5, 885–892. [Google Scholar] [CrossRef] [Green Version]
- Ramsey, E.; Rangoonwala, A.; Suzuoki, Y.; Jones, C.E. Oil Detection in a Coastal Marsh with Polarimetric Synthetic Aperture Radar (SAR). Remote Sens. 2011, 3, 2630–2662. [Google Scholar] [CrossRef] [Green Version]
- Chiu, C.M.; Huang, C.J.; Wu, L.C.; Zhang, Y.L.J.; Chuang, L.Z.H.; Fan, Y.M.; Yu, H.C. Forecasting of oil-spill trajectories by using SCHISM and X-band radar. Mar. Pollut. Bull. 2018, 137, 566–581. [Google Scholar] [CrossRef]
- Li, C.; Huang, W.M.; Gleason, S. Dual antenna space-based GNSS-R ocean surface mapping: Oil slick and tropical cyclone sensing. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2015, 8, 425–435. [Google Scholar] [CrossRef]
- Wang, S.; Fu, X.; Zhao, Y.; Wang, H. Modification of CFAR algorithm for oil spill detection from SAR data. Intell. Autom. Soft Comput. 2015, 21, 163–174. [Google Scholar] [CrossRef]
- Velotto, D.; Migliaccio, M.; Nunziata, F.; Lehner, S. Dual-polarized TerraSAR-X data for oil-spill observation. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4751–4762. [Google Scholar] [CrossRef]
- Nunziata, F.; Migliaccio, M.; Gambardella, A. Pedestal height for sea oil slick observation. IET Radar Sonar. Nav. 2011, 5, 103–110. [Google Scholar] [CrossRef]
- Zhang, B.; Li, X.; Perrie, W.; Garcia-Pineda, O. Compact polarimetric synthetic aperture radar for marine oil platform and slick detection. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1407–1423. [Google Scholar] [CrossRef]
- Xu, H.; Chen, J.; Wang, S.; Liu, Y. Oil spill forecast model based on uncertainty analysis: A case study of Dalian oil spill. Ocean Eng. 2012, 54, 206–212. [Google Scholar] [CrossRef]
- Sun, S.l.; Lu, Y.C.; Liu, Y.X.; Wang, M.Q.; Hu, C.M. Tracking an oil tanker collision and spilled oils in the East China Sea using multisensor day and night satellite imagery. Geophys. Res. Lett. 2018, 45, 3212–3220. [Google Scholar] [CrossRef]
- Boutin, J.; Siefridt, L.; Etcheto, J.; Barnier, B. Comparison of ECMWF and satellite ocean wind speeds from 1985 to 1992. Int. J. Remote Sens. 1996, 17, 2897–2913. [Google Scholar] [CrossRef]
- Saket, A.; Etemad-Shahidi, A.; Moeini, M. Evaluation of ECMWF wind data for wave hindcast in Chabahar zone. J. Coastal Res. 2013, 65, 380–385. [Google Scholar] [CrossRef]
- Chen, C.S.; Huang, H.; Beardsley, R.C.; Liu, H.; Xu, Q.; Cowles, G. A finite-volume numerical approach for coastal ocean circulation studies: Comparisons with finite difference models. J. Geophys. Res. 2007, 112, C03018. [Google Scholar] [CrossRef]
- Akpınar, A.; Vledder, G.; Kömürcü, M.; Özger, M. Evaluation of the numerical wave model (SWAN) for wave simulation in the Black Sea. Cont. Shelf Res. 2012, 50, 80–99. [Google Scholar] [CrossRef]
- Yin, L.; Zhang, M.; Zhang, Y.; Qiao, F.L. The long-term prediction of the oil-contaminated water from the Sanchi collision in the East China Sea. Acta Oceanol. Sin. 2018, 3, 1–4. [Google Scholar] [CrossRef]
- Shao, W.Z.; Zhu, S.; Sun, J.; Yuan, X.Z.; Sheng, Y.X.; Zhang, Q.J.; Ji, Q.Y. Evaluation of wind retrieval from co-polarization Gaofen-3 SAR imagery around China seas. J. Ocean. Univ. China 2019, 18, 80–92. [Google Scholar] [CrossRef]
- Shao, W.Z.; Hu, Y.Y.; Zheng, G.; Cai, L.N.; Zou, J.C. Sea state parameters retrieval from cross-polarization Gaofen-3 SAR data. Adv. Space Res. 2019, 65, 1025–1034. [Google Scholar] [CrossRef]
- Franceschetti, G.; Iodice, A.; Riccio, D.; Ruello, G.; Siviero, R. SAR raw signal simulation of oil slicks in ocean environments. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1935–1949. [Google Scholar] [CrossRef]
- Shao, W.Z.; Jiang, X.W.; Nunziata, F.; Marino, A.; Corcione, V. Analysis of waves observed by synthetic aperture radar across ocean fronts. Ocean. Dynam. 2020, 70, 1–11. [Google Scholar] [CrossRef]
- Lehr, W.; Fraga, R.; Belen, M.; Cekirge, H. A new technique to estimate initial spill size using a modified fay-type spreading formula. Mar. Pollut. Bull. 1984, 15, 326–329. [Google Scholar] [CrossRef]
- Wright, J.W. Stokes drift and the fully developed sea. J. Geophys. Res. 1970, 75, 2847–2848. [Google Scholar] [CrossRef]
- Bi, F.; Wu, K.J.; Zhang, Y.M. Effect of Stokes drift on Ekman transport in the open sea. Acta Oceanol. Sin. 2012, 6, 14–20. [Google Scholar] [CrossRef]
- Xu, Q.; Cheng, Y.; Liu, B.; Wei, Y.Y. Modeling of oil spill beaching along the coast of the Bohai sea, China. Front. Earth Sci. 2015, 9, 637–641. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Imaging Mode | SAR Acquisition Time (YYYY-MM-DD) | SAR Oil Area (km2) | Model Acquisition Time (YYYY-MM-DD) | Model-Simulated Oil Area (km2) |
|---|---|---|---|---|
| FSII | 2018-1-15 21:39 | 83.78 | 2018-1-15 22:00 | 82.31 |
| SS | 2018-1-17 09:42 | 364.70 | 2018-1-17 10:00 | 363.56 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Shao, W.; Hu, Y.; Ji, Q.; Li, H.; Zhou, W. Revisit of a Case Study of Spilled Oil Slicks Caused by the Sanchi Accident (2018) in the East China Sea. J. Mar. Sci. Eng. 2021, 9, 279. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9030279
Yang Z, Shao W, Hu Y, Ji Q, Li H, Zhou W. Revisit of a Case Study of Spilled Oil Slicks Caused by the Sanchi Accident (2018) in the East China Sea. Journal of Marine Science and Engineering. 2021; 9(3):279. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9030279
Chicago/Turabian StyleYang, Zhehao, Weizeng Shao, Yuyi Hu, Qiyan Ji, Huan Li, and Wei Zhou. 2021. "Revisit of a Case Study of Spilled Oil Slicks Caused by the Sanchi Accident (2018) in the East China Sea" Journal of Marine Science and Engineering 9, no. 3: 279. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9030279