1. Introduction
With the rapid development of marine science and technology, a variety of underwater vehicles are helping humankind to continue to explore the ocean, comprehend the ocean, and make use of the ocean [
1,
2,
3]. The deep-sea environment, with highly corrosive and high hydrostatic pressure, has brought many challenges to the development of high-performance underwater vehicles. One of the most common problems is the sealing of the output shaft. Traditional mechanical seals have complex structures, serious mechanical losses, and low reliability, so it is difficult to ensure the normal operation of internal electrical components, especially in the deep-sea environment. As a useful solution for the shaft sealing, permanent magnet couplings (PMCs) have been widely used in underwater equipment, chemical and nuclear power, and other industrial applications in recent years [
4,
5].
PMCs use magnetic force to realize non-contact torque transmission, which can convert the dynamic seal into a static seal, thus greatly improving the security and stability of the seal [
6,
7]. The application of PMCs is closely related to the research and development of rare-earth permanent magnets. According to the magnetization direction of permanent magnets, existing PMCs can be broadly classified into cylindrical PMCs and axial PMCs [
8,
9,
10,
11,
12]. For PMC, it is generally required to achieve a given maximum transmitted torque with a minimum volume of permanent magnets [
13]. In the initial design, the maximum transmitted torque is one of the most important characteristics of PMCs. Some classical analytical methods and finite element analysis (FEA) methods are employed to calculate the torque performance of PMCs in the very early research [
6,
14], and the optimization designs are carried out based on those calculation methods [
9,
10,
15,
16]. In addition to the maximum transmitted torque, the inertia, weight, and cost are also the main specifications for the design of PMCs. Directly adopting an ironless structure can reduce the inertia and weight, but it will also affect the torque performance of PMC [
4,
11,
17].
It is well known that the Halbach array is a special magnetization method for permanent magnets, which offer many attractive features, such as sinusoidal airgap field distribution, potentially high airgap flux density, and self-shielding magnetization [
18,
19,
20,
21,
22]. In recent years, more attention in research has been given to the application of the Halbach array in magnetic machines, since it is an effective way to improve the performance [
23,
24,
25]. The PMC with Halbach array has attracted great interest, because it can improve torque performance while reducing the mass and inertia [
26,
27]. The PMC is defined with Halbach magnetized outer rotor as Halbach permanent magnet couplings (HPMCs). There are three common HPMCs, which adopt radial, parallel, and Halbach magnetized inner rotors, respectively. In [
28], the transmitted torque of the HPMC with Halbach magnetized inner and outer rotors is calculated and compared with that of the traditional parallel magnetized PMC by analytical method, finding that the HPMC requires a significantly lower magnet volume to produce the same transmitted torque as the parallel magnetized PMC. The analytical torque calculation method of the HPMC using a segmented Halbach array for both inner and outer rotors was established in [
29]. An HPMC with a radially magnetized inner rotor was designed and optimized in [
7].
Streamlined revolved body is one of the most common structural forms of underwater vehicles, and it has a conical tail segment, as shown in
Figure 1a. The underwater propulsion unit chosen is generally radial PMC, which is mounted in the tail segment, as shown in
Figure 1b. Most of the existing HPMCs do not take into consideration the special needs of the underwater propulsion and thus have many limitations in performance improvement. In our previous work [
30], a conical permanent magnet coupling is first proposed, matching the tail segment space of the underwater vehicle so as to can make full use of the tail space to improve the torque performance. However, its application in engineering is greatly limited because of the use of irregular permanent magnets. Taking the practical situation of the engineering application into account and improving performance at the same time, a novel conical Halbach permanent magnet coupling (C-HPMC) is proposed. The C-HPMC combines multiple cylindrical HPMCs with different sizes into an approximately conical structure, which can make full use of the tail space and is easy to process (
Figure 1c).
In this paper, features of C-HPMCs are analyzed and the analytical model is established. The analytical calculation method of transmitted torque of C-HPMC is proposed on the basis of torque calculation of the three common types of HPMCs. The accuracy of the torque calculation of the three HPMCs is verified, and the torque performance of the three HPMCSs of different sizes is compared and analyzed. The “optimal type selection” method is proposed and applied in the design of C-HPMC. A research case of C-HPMC is established under certain prefixed geometric parameter constraints, and the specific design and analysis process is given.
2. Topologies and Features of C-HPMC
The PMC for underwater propulsion is mounted in the tail segment of underwater vehicles. The inner rotor is connected with the motor output shaft, and the outer rotor drives the propeller. Non-contact torque transmission between the inner and outer rotors is achieved by the permanent magnet magnetic force. The tail segment of underwater vehicles is simplified to a simple conical space. It can be seen from
Figure 2a that the traditional cylindrical PMC cannot make full use of this space.
Figure 2b shows the structure of the proposed C-HPMC, which is composed of multiple cylindrical HPMCs with different sizes.
If the traditional cylindrical PMC is used in the tail segment, the relationship between the outer diameter
and the axial length is as follows:
where
is the outer diameter of the tail conical space,
is the axial length of PMC, and
is the half cone angle. It is assumed that the C-HPMC is divided into
modules, and each module has the same axial length. Then, the outer diameter of the nth HPMC
can be expressed as:
where
is the axial length of the tail conical space.
When designing a PMC, the size of the outer rotor is usually restricted, but the inner space is often sufficient. Choosing the Halbach magnetized outer rotor can help to make full use of outer rotor space and improve the ability of the transmitted torque. There are three common HPMCs, which adopt radial, parallel, and Halbach magnetized inner rotors respectively, as shown in
Figure 3a–c. In the present study, considering the difficulty of processing, the two-segment Halbach magnetized PMs are used in HPMCs. The only difference among the three HPMCs is the magnetization direction of the inner rotor PMs.
is the relative magnetic permeability,
is the inner radius of PMCs,
is the outer radius of PMCs,
is the inner radius of inner PMs,
is the outer radius of inner PMs,
is the inner radius of outer PMs,
is the outer radius of outer PMs,
is the angle of the main pole,
is the pole pitch,
is the arc length of PMs. For the two-segment Halbach magnetized rotors, the PMs can be divided into the main poles and the auxiliary poles. The ratio of the main pole can be expressed as:
In order to facilitate processing and save costs, the
is usually 0.5. For the radial and parallel magnetized rotors, the pole arc coefficient is defined as:
For type-2 and type-3, the highest torque is achieved when
is equal to 1. For all of the three types of HPMCs, the
of the initial Halbach magnetized inner rotors and outer rotors is 0.5. The geometrical parameters of the tail conical space and the initially designed C-HPMC are shown in
Table 1. Both the inner and outer rotors use high-performance permanent magnet NdFeB, the residual magnetic flux density is 1.27 T, and the relative permeability is 1.1045.
3. Performance Analysis of the C-HPMC
The C-HPMC presented above adopts two methods to improve the torque transmission capacity of the propulsion system of underwater vehicles: one is the multi-module specially shaped structure, and the other is the usage of Halbach array PMs. The performance of the C-HPMC is the result of the combined action of multiple cylindrical HPMCs. There are three common HPMCs with different magnetized inner rotors. The comparative study of three types of HPMCs is the foundation for the design and optimization of C-HPMC.
The main function of the C-HPMC is to realize non-contact torque transmission, and hence the transmitted torque has always been a research focus. For underwater propulsion, the maximum transmitted torque is also the most important specification for the design of C-HPMC. At the same time, the propeller directly connected to the outer rotor of C-HPMC is used to convert the torque into thrust. A slight displacement of the propeller in the axial direction leads to an axial force that is opposed to this displacement. The novel C-HPMC proposed in this paper is expected to have more complex and comprehensive mechanical characteristics. It can be used as a coupling to transmit torque and as a passive axial bearing to maintain the propeller in its axial position, compensating the axial force related to thrust. Therefore, the axial force of the novel C-HPMC also needs to be carefully studied.
3.1. Transmitted Torque Calculation of the C-HPMC
The transmitted torque of PMCs can be analyzed by three-dimensional FEA (3D FEA) method or two-dimensional FEA (2D FEA) method. However, the FEA method is not suitable for the initial design and optimization design, especially when the calculation model size is large or the number of design parameters is large. Many samples with different design parameters need to be calculated in the initial design and optimization stage of the new prototype. When analyzing the influence of design parameters on the novel C-HPMC, it is more efficient to use analytical methods. The analytical method is helpful not only to solve the problem of computational cost and efficiency, but also to understand the design object fundamentally. Since the maximum transmitted torque directly determines the power output capability of the propulsion unit, it is necessary to analyze and optimize the torque performance of the C-HPMC. The analytical method based on accurate subdomain and Maxwell stress tensor will be used for transmitted torque calculation.
For the C-HPMC consisting of
HPMCs, the total transmitted torque
is the sum of the transmitted torque of HPMCs:
where
, the transmitted torque of the nth HPMC, can be expressed as:
where
is the rotor position angle,
is the radius of the airgap of the nth HPMC,
is the axial length the nth HPMC, and
and
are the radial and tangential components of the air gap flux density of the nth HPMC, respectively. The air gap flux density is jointly excited by the inner and outer rotor permanent magnets of the nth HPMC, so it can be expressed as:
where
,
,
,
are the radial and tangential components of the air gap flux density when the inner and outer rotors are separately excited. The only difference between the rotors is the distribution of residual magnetization. When the magnetization mode of the permanent magnets is different, the analytical expression of the magnetization components
and
are different. The three types of HPMCs include one type of outer rotor and three types of inner rotors, their waveforms are shown in
Figure 4.
For the HPMCs, the airgap field produced by the outer and inner rotor is governed by Laplacian/quasi-Poissonian equations and boundary conditions. The analytical solution to the air gap flux density excited by a single inner rotor or outer rotor can refer to the analytical expression of the air gap magnetic field of ideal PM motors. The complete solution to the flux density components can be deduced from the general solution of Laplacian/quasi-Poissonian equations and the specified boundary conditions.
For the Halbach magnetized outer rotor:
where,
For the Halbach magnetized inner rotor:
For the parallel magnetized inner rotor:
For the radial magnetized inner rotor:
where,
The size parameters are as follows:
3.2. Verification of Analytical Method
For all traditional cylindrical HPMCs used in underwater vehicles, it is assumed that the thickness of the PMs of the inner and outer rotors is 3.5 mm, the air gap length is 2 mm, and the thickness of the out yoke is 3 mm. The outer diameter of HPMCs corresponding to different axial lengths can be determined according to the Formula (1) given in
Section 2.
Table 2 lists the maximum transmitted torque
of three types of HPMCs with different sizes, obtained by analytical method. It can be seen that as the axial length increases, the
first increases and then decreases. When
= 50 mm, the maximum
can be obtained by adopting type-1 structure of HPMCs.
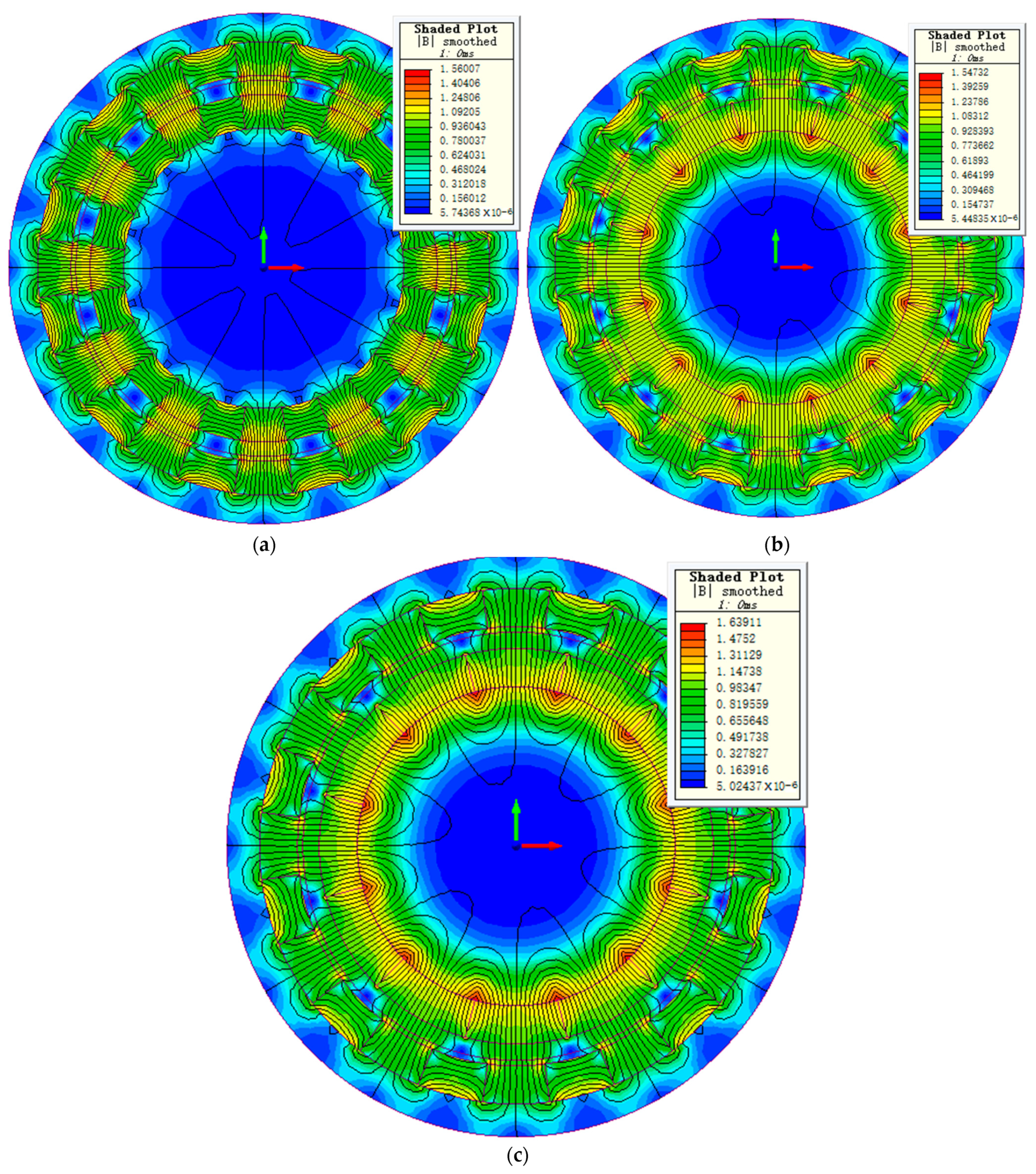
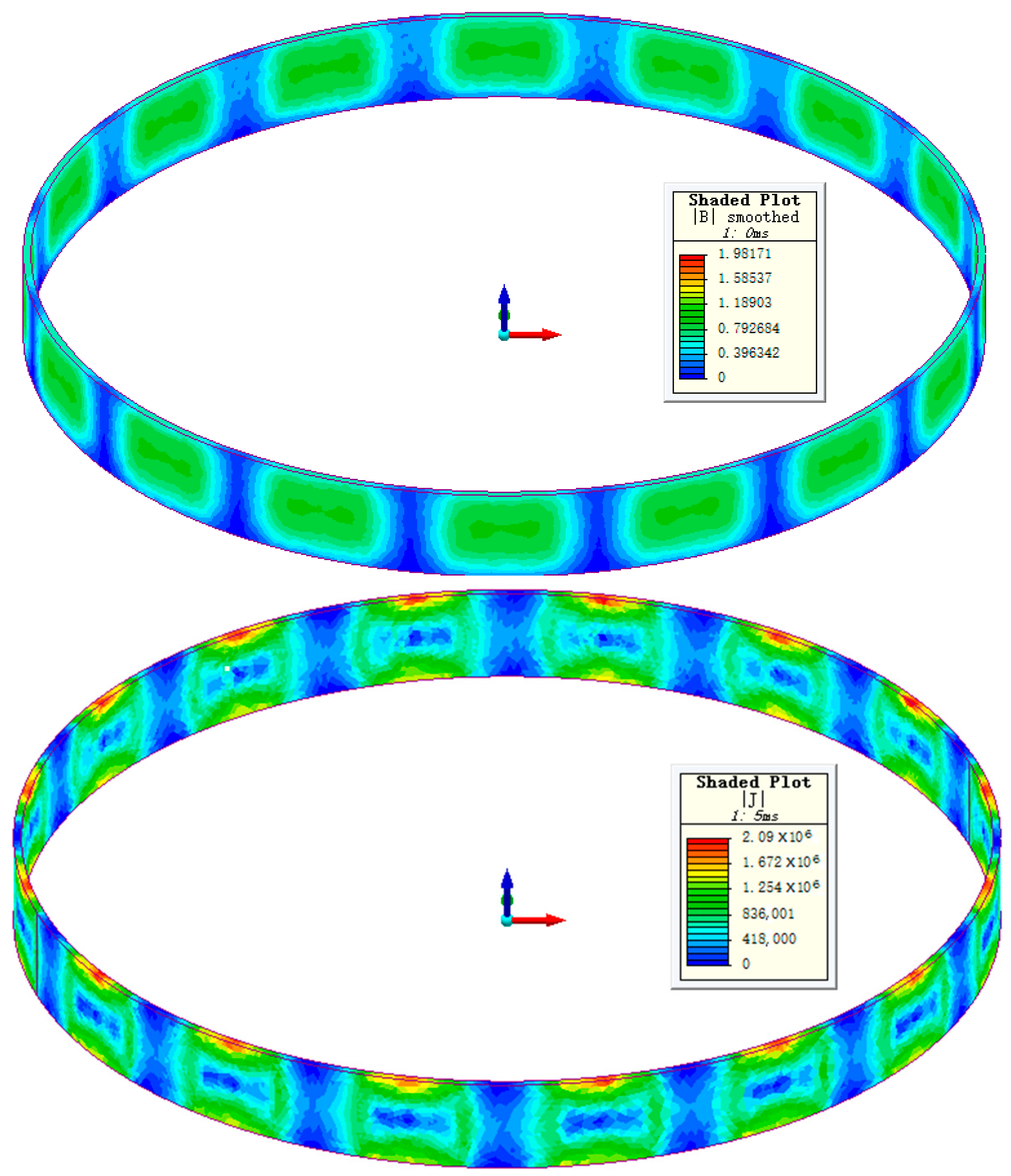
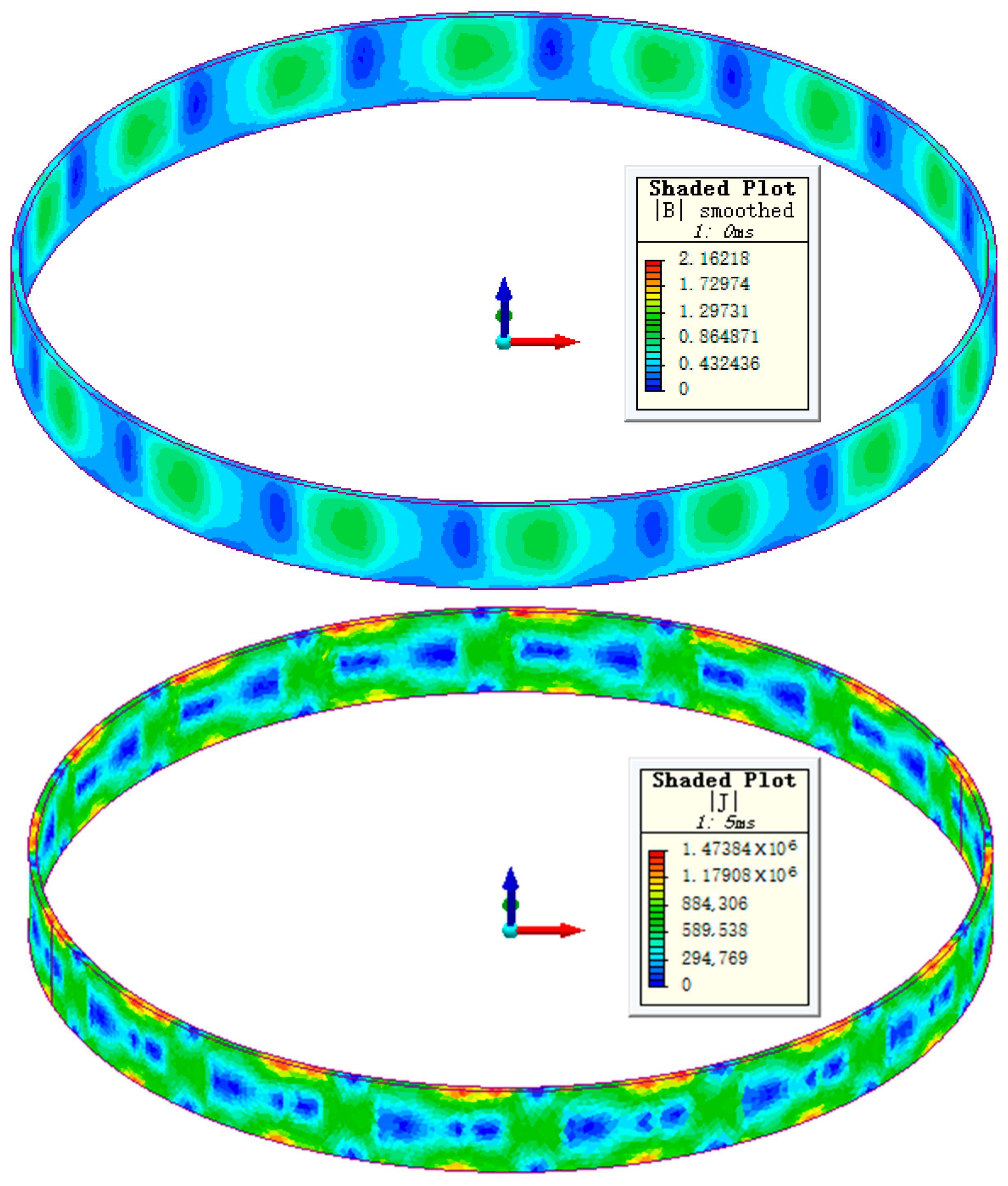
The FEA models of three types of HPMCs corresponding to
= 50 mm are established to calculate the transmitted torque and compare with the analytical results. All of the FEA simulations are carried out using electromagnetic field analysis software Infolytica/MagNet.
Figure 5a–c shows the FEA models and distribution of the HPMCs.
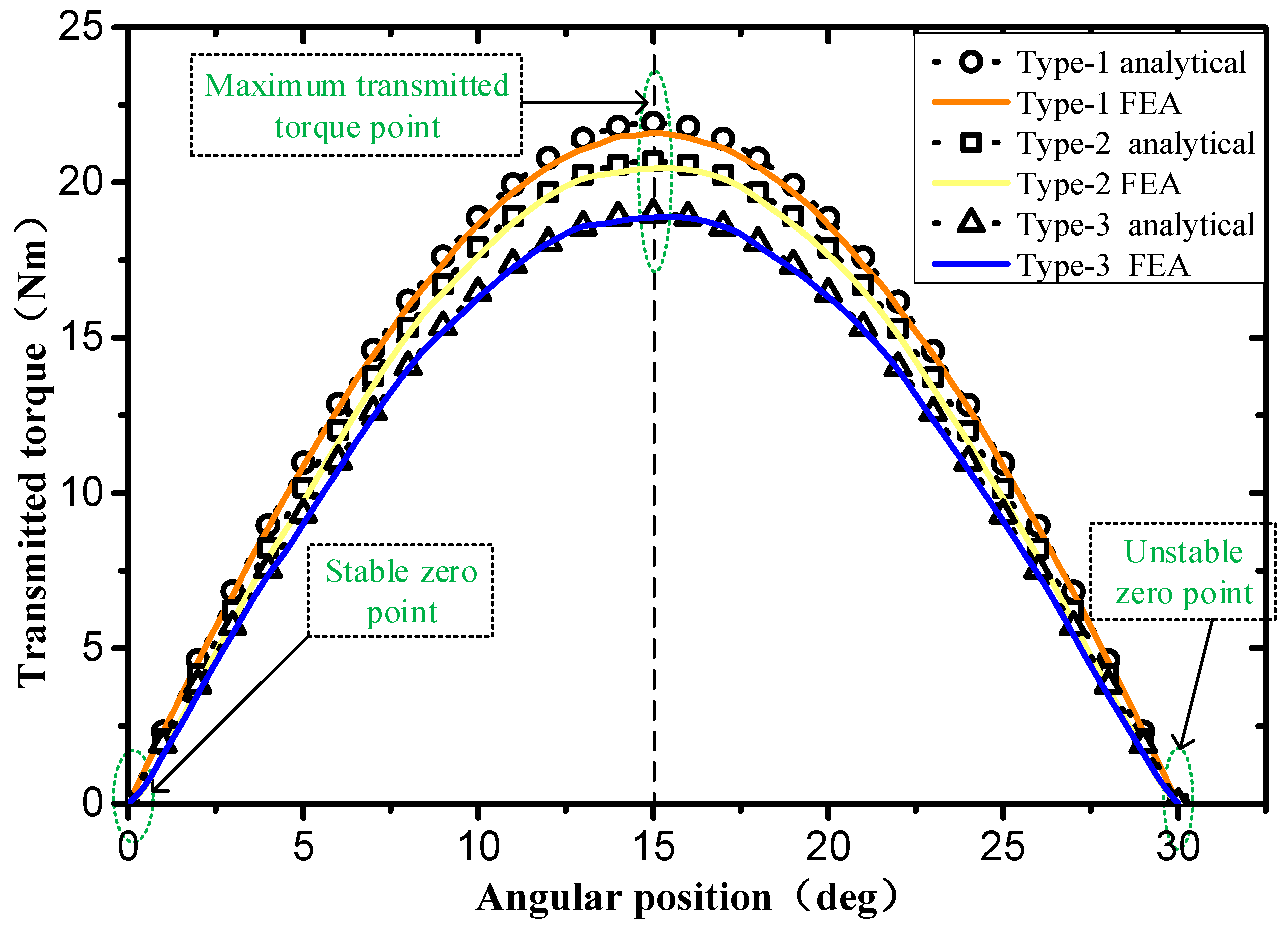
Figure 6 shows the comparison of analytical results and FEA results for the transmitted torque of initial H-HPMCs, P-HPMCs, and R-HPMCs models. The transmitted torque increases first and then decreases as the angular displacement
increases. When
, there is maximum transmitted torque
. It can be seen that the analytical results are in good agreement with the 2D-FEA results. Therefore, the proposed analytical method can be used for a comparative study of the three types of HPMCs.
3.3. Optimal Type Selection Method of C-HPMC
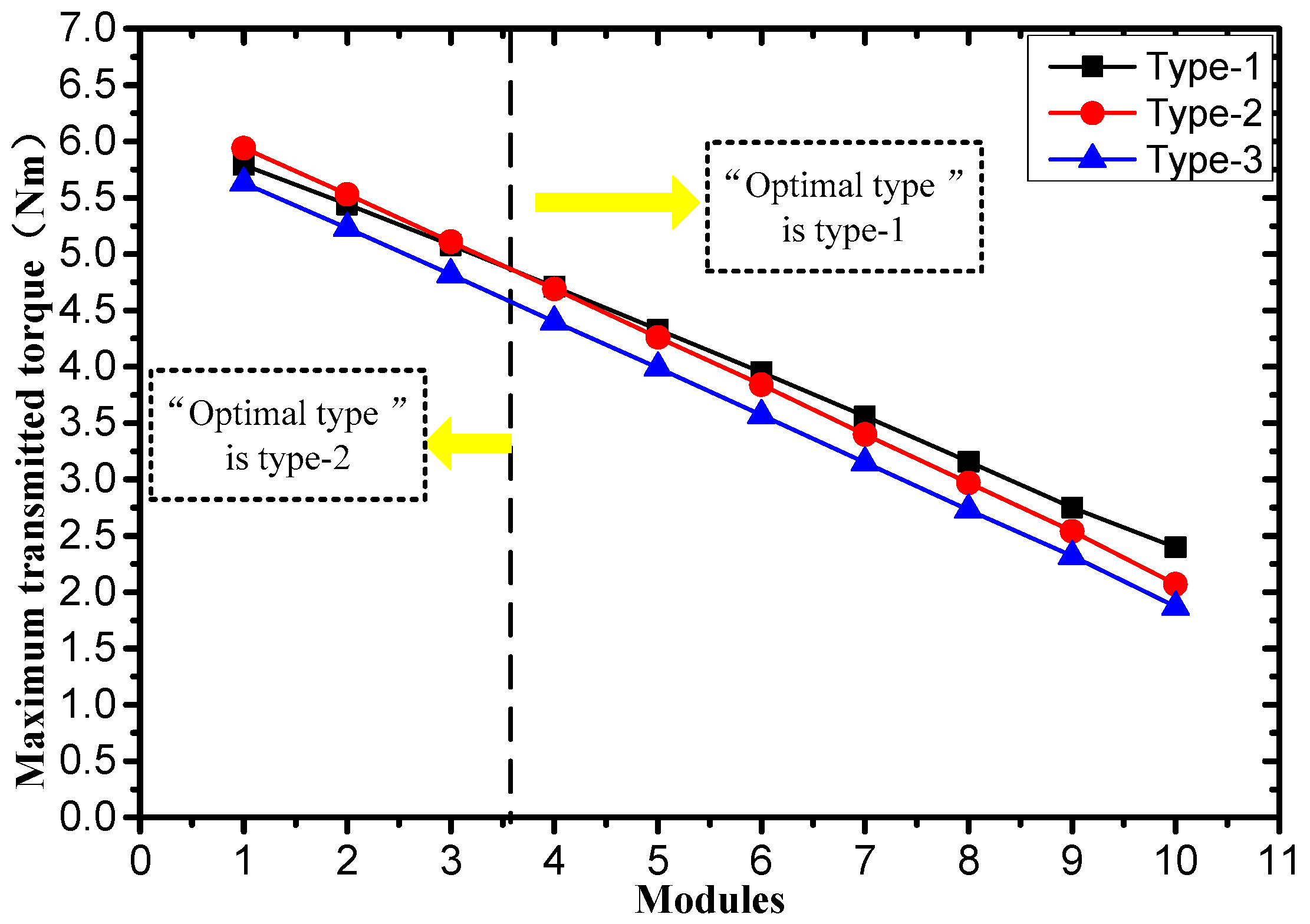
Assuming that the C-HPMC is divided into 10 modules and each module has the same axial length, the outer diameter of each module can be calculated by Formula (2) given in
Section 2. Keeping other parameters such as PMs thickness and outer yoke thickness and pole pair number unchanged, the model of each module of C-HPMC can be determined, and the
of each module is listed in
Table 3. It can be seen intuitively from
Figure 7 that the optimal type of each module of C-HPMC is different. In order to obtain the optimal transmitted torque, different modules of C-HPMC need to select different types of cylindrical HPMC, which we call the optimal type selection method in this paper. The
of the C-HPMCs based on one type of HPMCs or the optimal type selection method are listed in
Table 4. Obviously, the optimal type selection method is beneficial for improving the torque performance of the C-HPMC.
3.4. Axial Force of the C-HPMC
For underwater propulsion, the angular contact ball bearings or water-lubricated bearings are usually applied to balance the thrust of the propeller. Axial force is one of the main causes of problems such as bearing wear, low efficiency, and increased shaft noise. As long as there is an axial displacement between the inner and outer rotors of the HPMC, it can be a passive axial bearing to maintain the propeller in its axial position, compensating the axial force related to thrust. The advantages of passive bearings include structural simplicity, high reliability, and insignificant energy consumption, since they do not require control electronics or power sources. Calculating the axial force of the C-HPMC with an axial displacement can expand its function and application range.
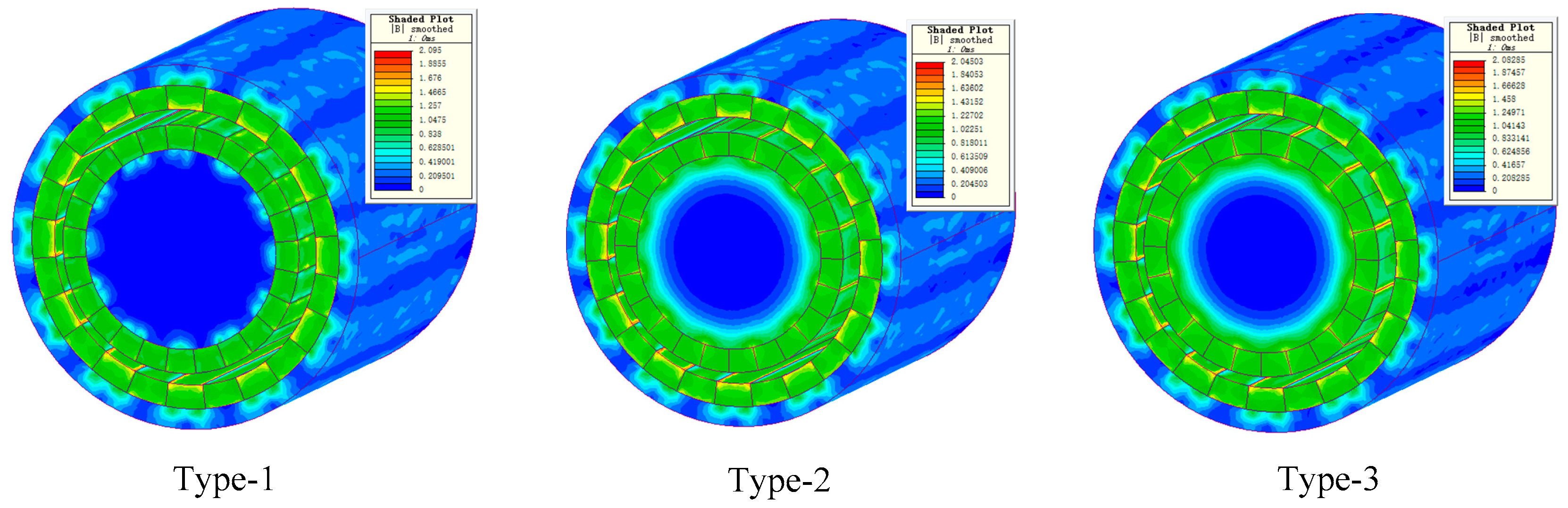
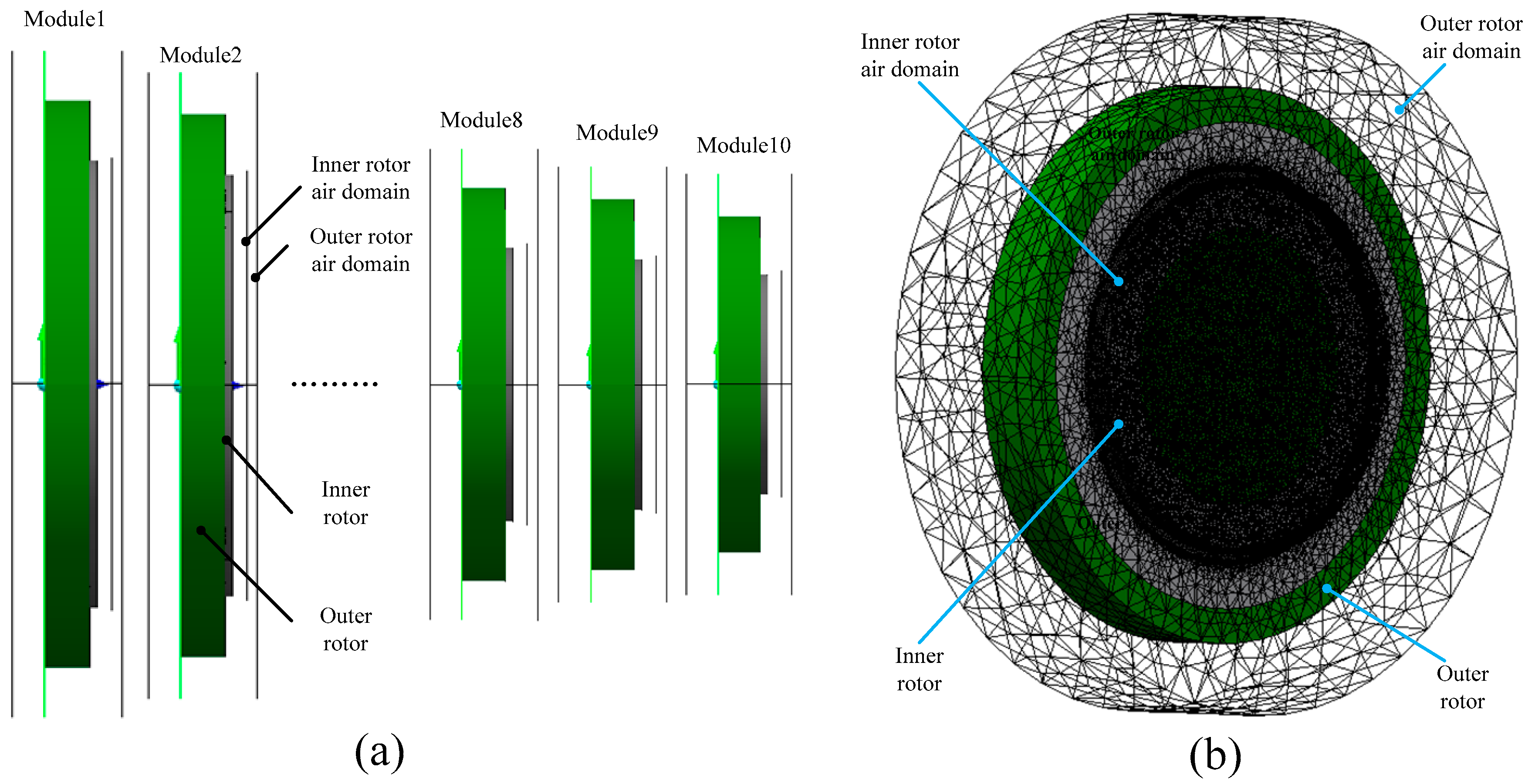
The three-dimensional (3D) FEA method is usually employed to calculate the axial force of magnetic machines. By establishing a suitable finite element analysis model, the axial force of HPMCs can be calculated accurately. Based on the parameters of the 2D FEA models in
Section 3.2, 3D FEA models are established (as shown in
Figure 8). The results are given in
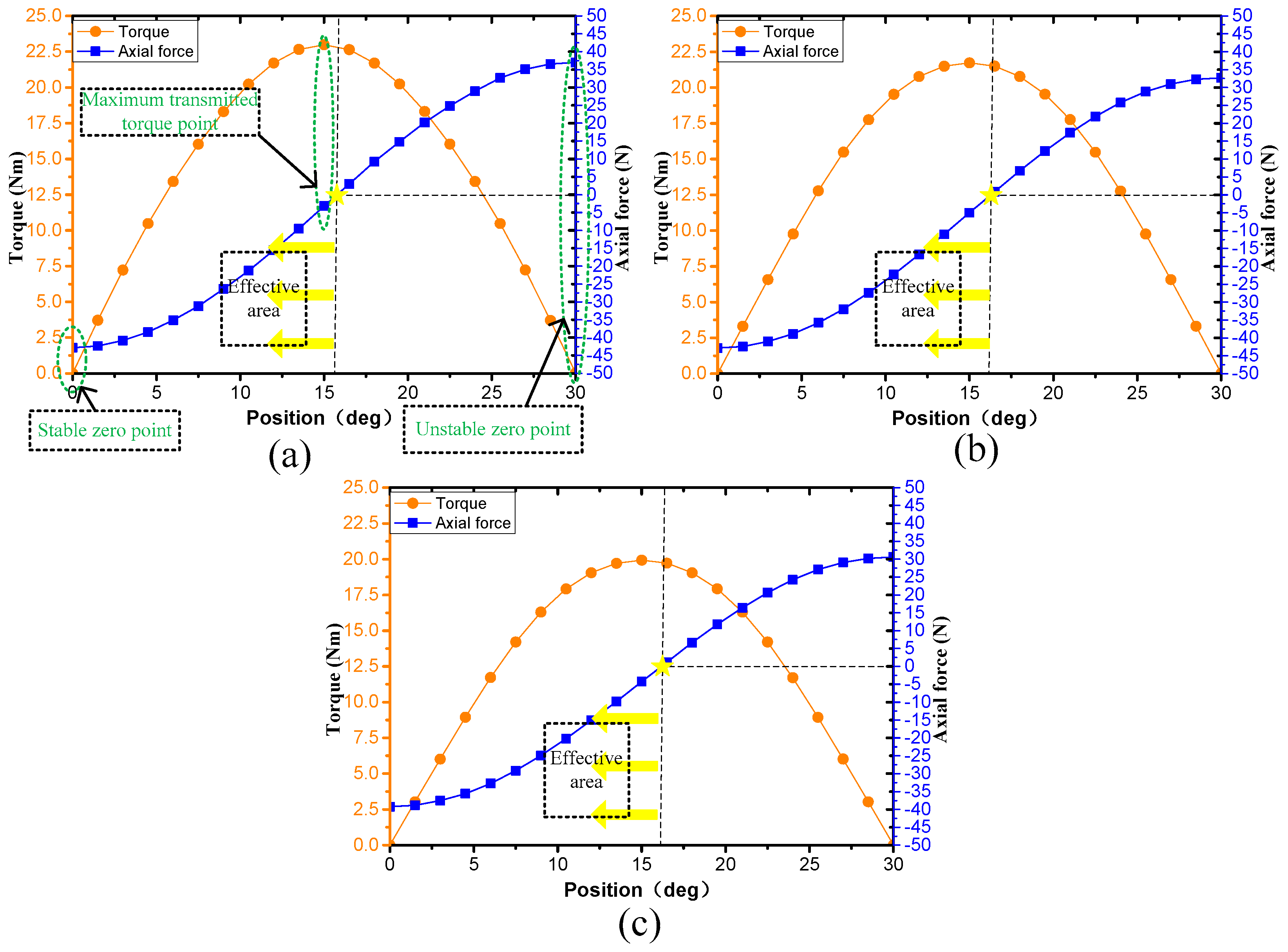
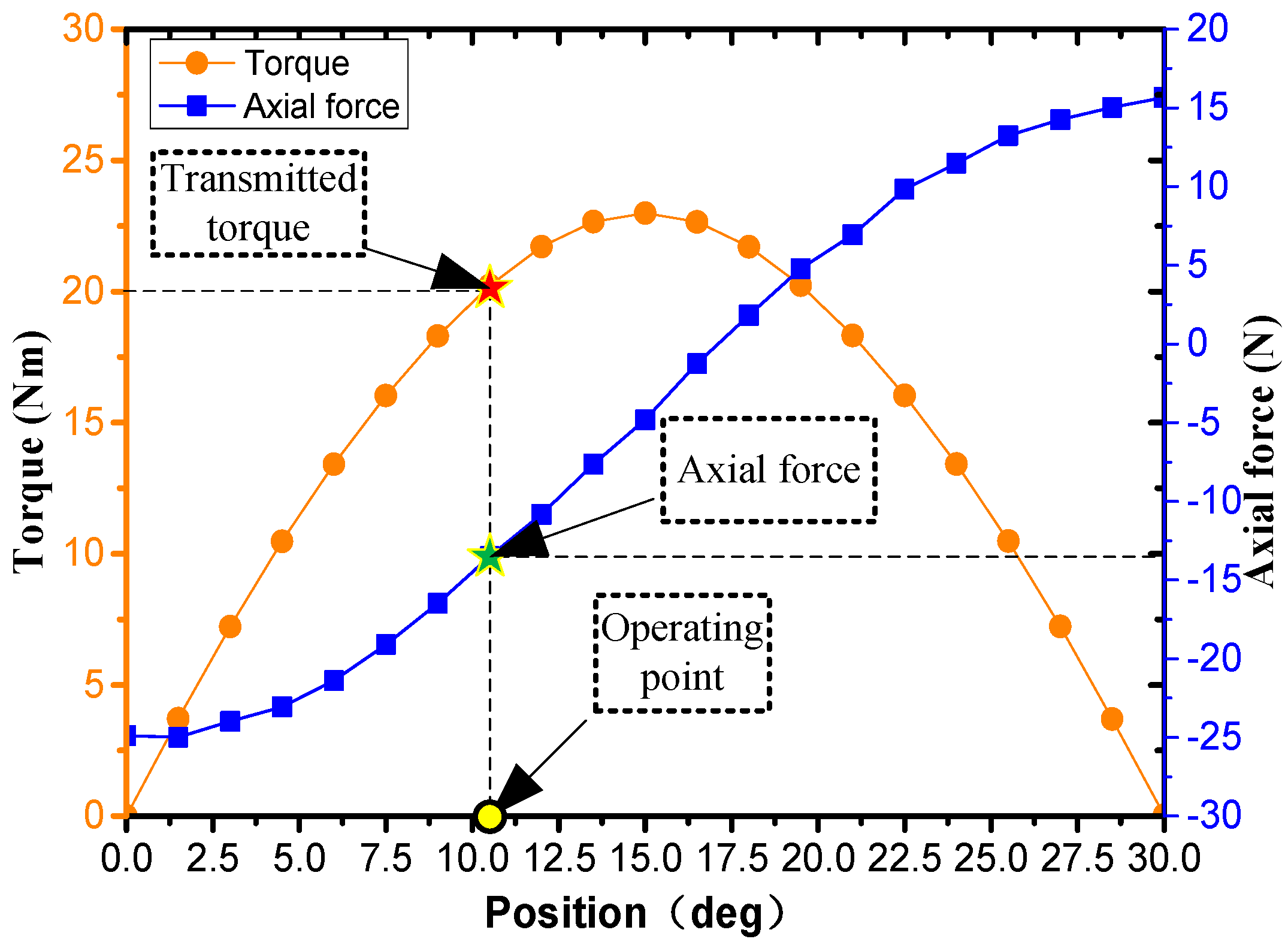
Figure 9 for the three types of HPMCs with 2 mm axial displacements. In the stable zero point, the transmitted torque is 0 and the reverse axial force is the largest. With the increase of the position angle, the transmitted torque first increases and then decreases, the axial force gradually decreases to zero and then increases in the opposite direction. The area indicated by the yellow arrow in
Figure 9 is the effective working area, in which the axial force direction is opposite to the displacement direction of the inner rotor. The reverse axial force can compensate the axial force related to thrust. In
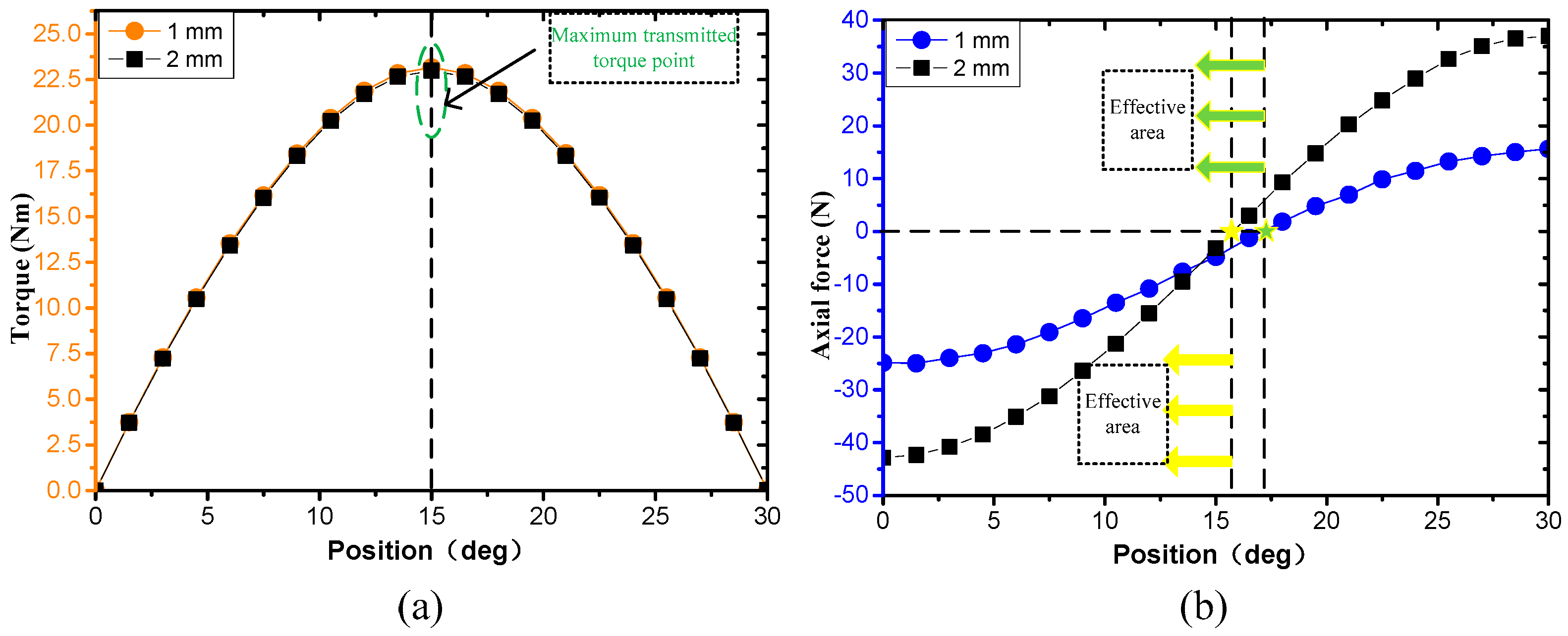
Figure 10, the transmitted torque and axial force of type-1 HPMC are compared when the axial displacement is 1 mm and 2 mm, respectively. It can be seen that as the axial displacement increases, the axial force increases rapidly, the torque decreases slightly, and the effective working area decreases. Therefore, for the C-HPMCs used in underwater propulsion, increasing the axial displacement is an effective way to compensate the propeller thrust, since the small displacement has little effect on the torque performance.
5. Conclusions
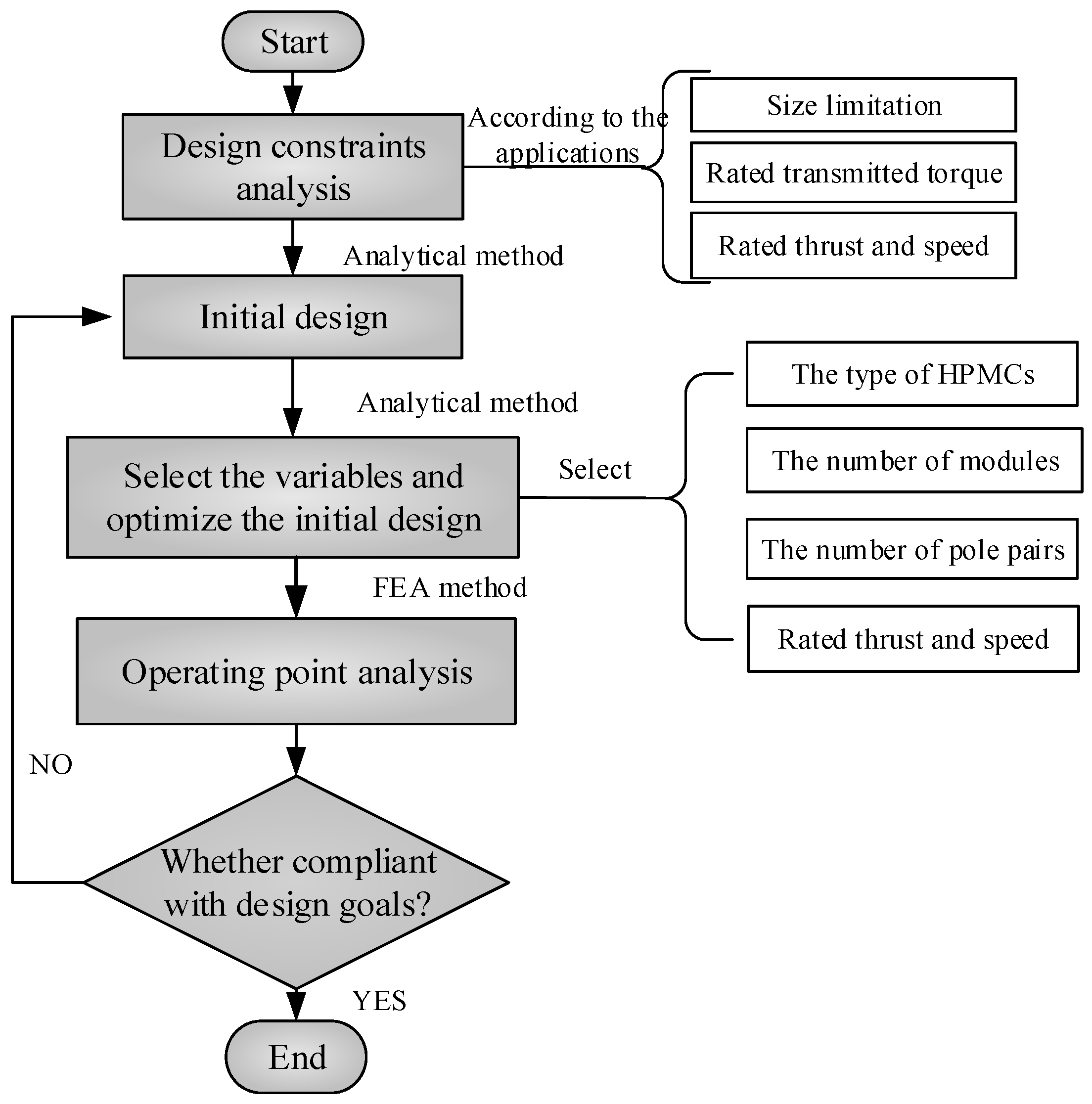
A novel C-HPMC is proposed and analyzed in this paper, which combines multiple cylindrical HPMCs with different sizes into an approximately conical structure. The C-HPMC adopts two methods to improve the torque transmission capacity of the propulsion system: one is the multi-module specially shaped structure, and the other is the use of the Halbach array PMs. In order to obtain the optimal transmitted torque, different modules of C-HPMC need to select different types of cylindrical HPMC. Three common HPMCs are comparatively analyzed by analytical method, and the “optimal type selection” method for the design of C-HPMC is proposed. Then, the axial forces of three types of HPMCs with axial displacement are calculated by the 3D-FEA method. The flowchart of the design of the novel C-HPMC is described, and a prototype is designed. Compared with the traditional cylindrical HPMCs, the axial force of the novel C-HPMC can compensate most of the thrust generated by the propeller while transmitting torque, which is very helpful to extend the life of the bearing and increase the reliability. Further work will focus on the multi-level and multi-disciplinary optimization of the overall performance of C-HPMCs. Based on the research mentioned above, the design framework of the C-HPMC can be extended to a variety of specially shaped complex magnetic machines, so that the performance of the magnetic machine can be well expanded.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}