
Application of Artificial Neural Networks to Predict Beach Nourishment Volume Requirements


Abstract
:1. Introduction
2. Materials and Methods
2.1. Data Set
2.2. Artificial Neural Network Model
3. Results and Discussion
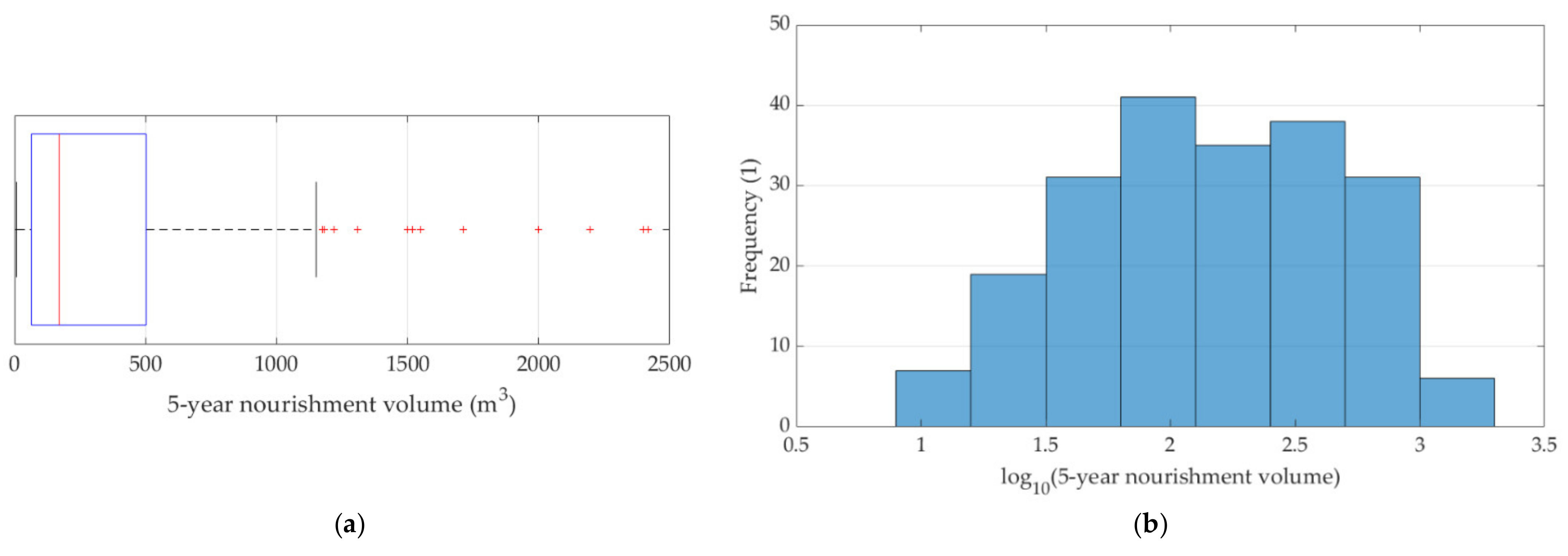
3.1. Beach Nourishment Data
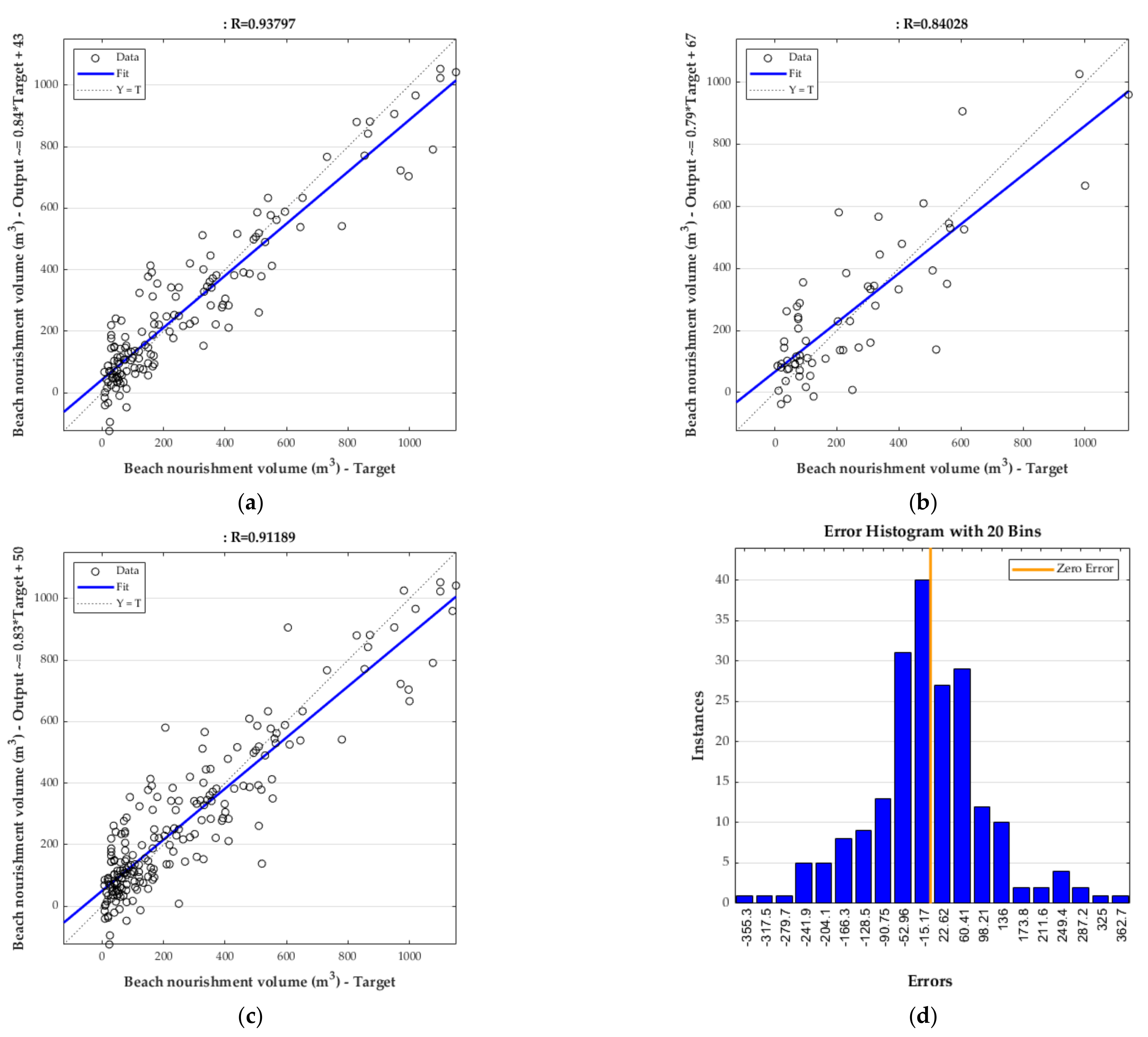
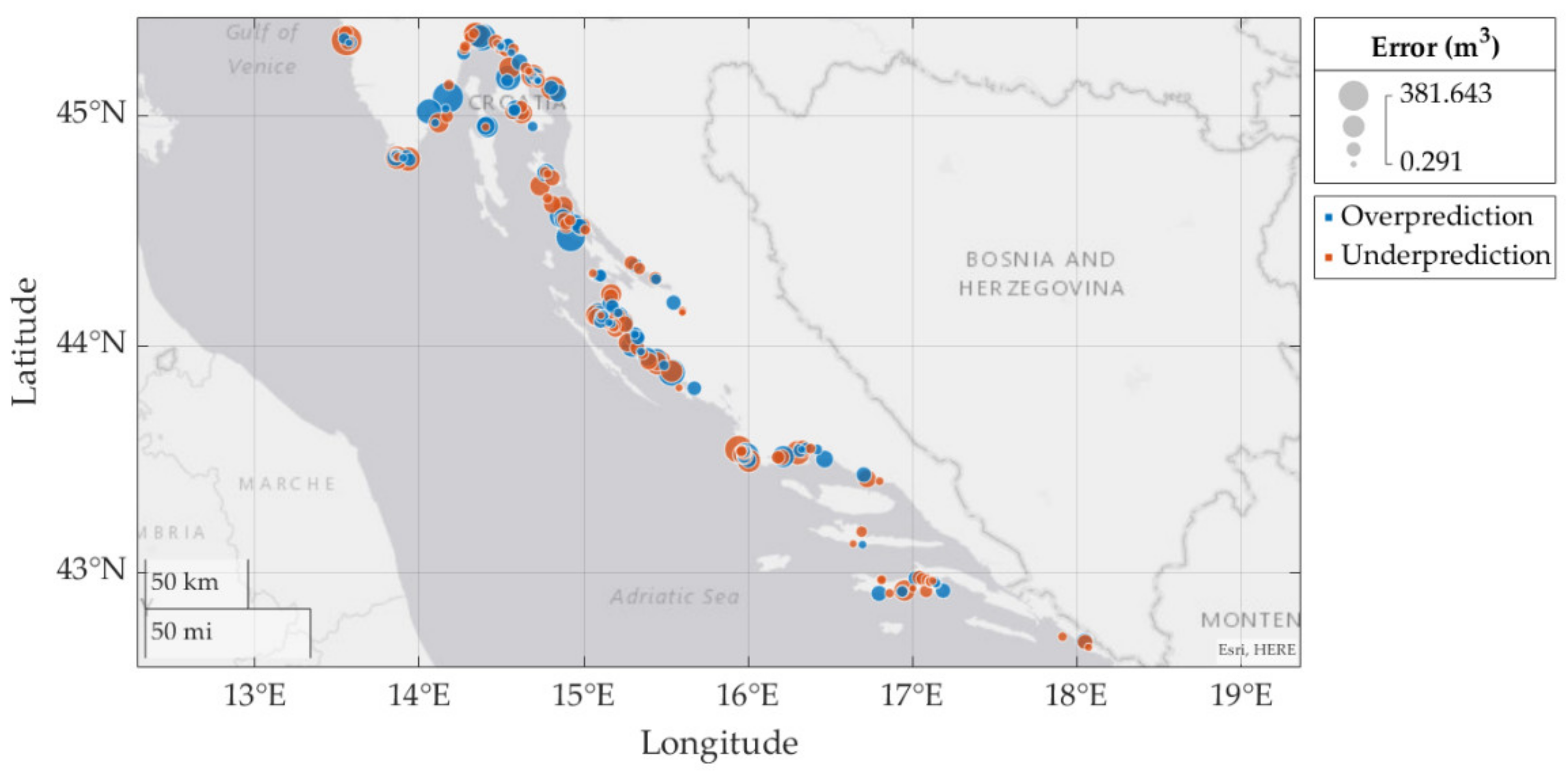
3.2. Artifical Neural Network Model Results
3.3. Evaluation of Input Variable Groups Contribution to ANN Prediction Skill
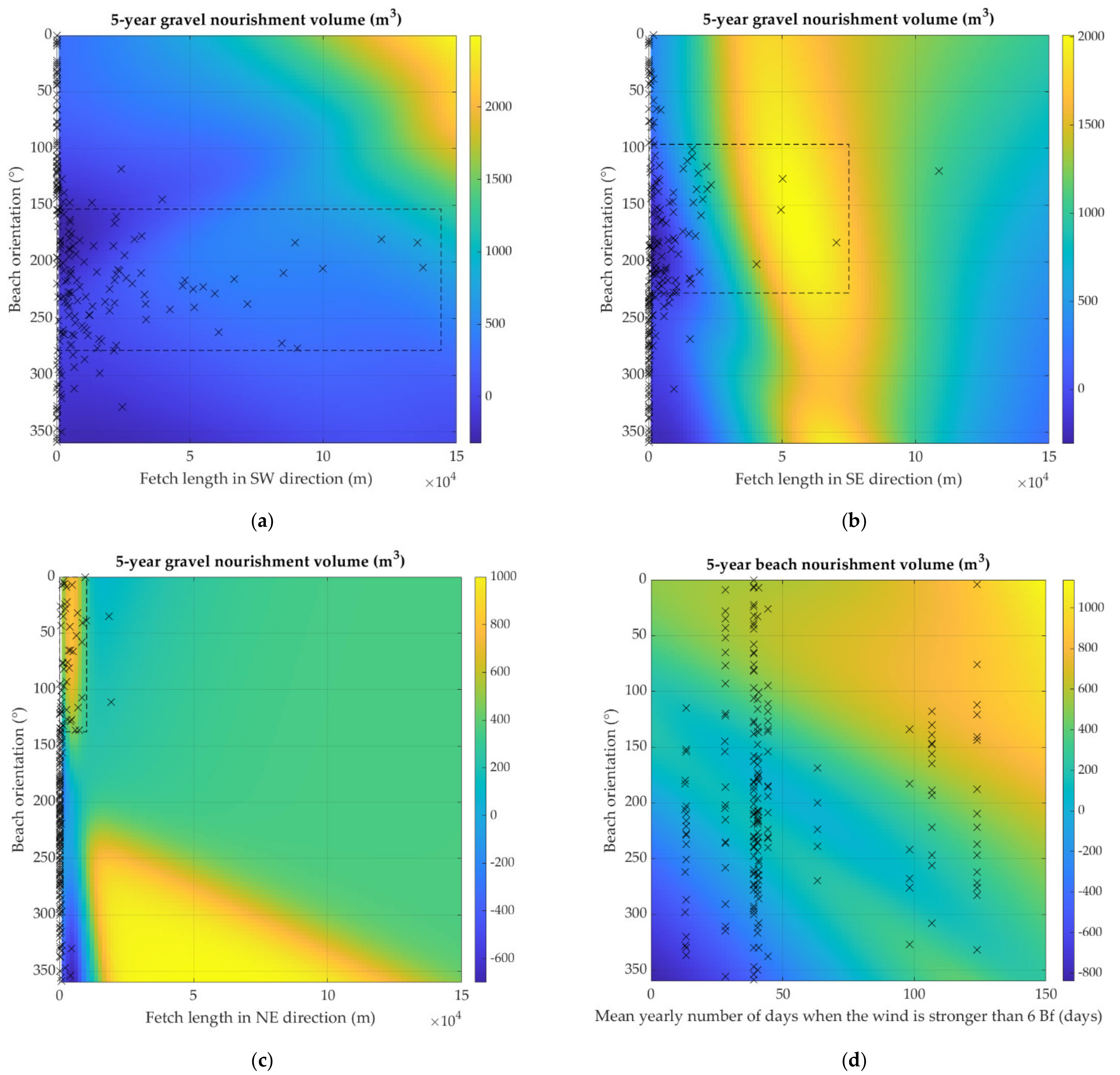
3.4. Sensitivity Analysis of the ANN to Beach Orientation, Fetch, and Wind Variables
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ANN | Performance Metric | Training | Test | Training + Test |
|---|---|---|---|---|
| Basic (B) | R | 0.452 | 0.467 | 0.454 |
| MSE | 5.94 × 104 | 5.96 × 104 | 5.94 × 104 | |
| B + Gravel | R | 0.618 | 0.678 | 0.635 |
| MSE | 4.39 × 104 | 4.70 × 104 | 4.48 × 104 | |
| B + Slope | R | 0.477 | 0.397 | 0.450 |
| MSE | 5.95 × 104 | 5.95 × 104 | 5.95 × 104 | |
| B + Fetch | R | 0.843 | 0.775 | 0.822 |
| MSE | 2.23 × 104 | 2.85 × 104 | 2.42 × 104 | |
| B + Wind | R | 0.660 | 0.667 | 0.658 |
| MSE | 4.23 × 104 | 4.34 × 104 | 4.26 × 104 | |
| B + Tide | R | 0.571 | 0.680 | 0.613 |
| MSE | 4.58 × 104 | 4.93 × 104 | 4.69 × 104 | |
| B + Rainfall | R | 0.550 | 0.572 | 0.544 |
| MSE | 5.21 × 104 | 5.24 × 104 | 5.22 × 104 | |
| Combined | R | 0.851 | 0.827 | 0.865 |
| MSE | 1.69 × 104 | 2.23 × 104 | 1.85 × 104 | |
| Combined—Coord | R | 0.894 | 0.867 | 0.885 |
| MSE | 1.45 × 104 | 2.24 × 104 | 1.62 × 104 | |
| All | R | 0.938 | 0.840 | 0.912 |
| MSE | 9.63 × 103 | 1.96 × 104 | 1.26 × 104 | |
| Check | R | 1.000 | 1.000 | 1.000 |
| MSE | 0.0006 | 0.0232 | 0.0068 |
References
- Hinrichsen, D. The Coastal Population Explosion. The Next 25 Years: Global Issues. In Trends and Future Challenges for US National Ocean and Coastal Policy: Proceedings of a Workshop; NOAA: Washington, DC, USA, 1998; pp. 27–29. [Google Scholar]
- Pikelj, K.; Ruzic, I.; Ilic, S.; James, M.R.; Kordic, B. Implementing an efficient beach erosion monitoring system for coastal management in Croatia. Ocean Coast. Manag. 2018, 156, 223–238. [Google Scholar] [CrossRef] [Green Version]
- Wilson, K.E.; Adams, P.N.; Hapke, C.J.; Lentz, E.E.; Brenner, O. Application of Bayesian Networks to hindcast barrier island morphodynamics. Coast. Eng. 2015, 102, 30–43. [Google Scholar] [CrossRef]
- Bogaert, P.; Montreuil, A.-L.; Chen, M. Predicting Morphodynamics for Beach Intertidal Systems in the North Sea: A Space-Time Stochastic Approach. J. Mar. Sci. Eng. 2020, 8, 901. [Google Scholar] [CrossRef]
- Gunawardena, Y.; Ilic, S.; Pinkerton, H.; Romanowicz, R. Nonlinear transfer function modelling of beach morphology at Duck, North Carolina. Coast. Eng. 2009, 56, 46–58. [Google Scholar] [CrossRef] [Green Version]
- Southgate, H.N. Data-based yearly forecasting of beach volumes along the Dutch North Sea coast. Coast. Eng. 2011, 58, 749–760. [Google Scholar] [CrossRef]
- Goldstein, E.B.; Coco, G.; Plant, N.G. A review of machine learning applications to coastal sediment transport and morphodynamics. Earth Sci. Rev. 2019, 194, 97–108. [Google Scholar] [CrossRef] [Green Version]
- U.S. Army Corps of Engineers (USACE). Coastal Engineering Manual; USACE: Washington, DC, USA, 2008; p. 477.
- Dean, R.G. Coastal Sediment Processes: Toward Engineering Solutions. In Proceedings of Coastal Sediments’87, Specialty Conference on Advances in Understanding of Coastal Sediment Processes, New Orleans, LA, USA, 12–13 May 1987; pp. 1–24. [Google Scholar]
- Van Wellen, E.; Chadwick, A.J.; Mason, T. A review and assessment of longshore sediment transport equations for coarse-grained beaches. Coast. Eng. 2000, 40, 243–275. [Google Scholar] [CrossRef]
- van Rijn, L.C. A simple general expression for longshore transport of sand, gravel and shingle. Coast. Eng. 2014, 90, 23–39. [Google Scholar] [CrossRef]
- Hanson, H. Genesis—A Generalized Shoreline Change Numerical-Model. J. Coast. Res. 1989, 5, 1–27. [Google Scholar]
- Tomasicchio, G.R.; Francone, A.; Simmonds, D.J.; D’Alessandro, F.; Frega, F. Prediction of Shoreline Evolution. Reliability of a General Model for the Mixed Beach Case. J. Mar. Sci. Eng. 2020, 8, 361. [Google Scholar]
- van Maanen, B.; Coco, G.; Bryan, K.R.; Ruessink, B.G. The use of artificial neural networks to analyze and predict alongshore sediment transport. Nonlinear Process. Geophys. 2010, 17, 395–404. [Google Scholar] [CrossRef]
- Brunton, S.L.; Noack, B.R.; Koumoutsakos, P. Machine Learning for Fluid Mechanics. Annu. Rev. Fluid Mech. 2020, 52, 477–508. [Google Scholar] [CrossRef] [Green Version]
- Olden, J.D.; Joy, M.K.; Death, R.G. An accurate comparison of methods for quantifying variable importance in artificial neural networks using simulated data. Ecol. Model. 2004, 178, 389–397. [Google Scholar] [CrossRef]
- Plant, N.G.; Stockdon, H.F. Probabilistic prediction of barrier-island response to hurricanes. J. Geophys. Res. Earth Surf. 2012, 117. [Google Scholar] [CrossRef]
- Hashemi, M.R.; Ghadampour, Z.; Neill, S.P. Using an artificial neural network to model seasonal changes in beach profiles. Ocean Eng. 2010, 37, 1345–1356. [Google Scholar] [CrossRef]
- Tsekouras, G.E.; Rigos, A.; Chatzipavlis, A.; Velegrakis, A. A Neural-Fuzzy Network Based on Hermite Polynomials to Predict the Coastal Erosion. In Engineering Applications of Neural Networks; Springer: Cham, Switzerland, 2015; pp. 195–205. [Google Scholar] [CrossRef]
- Rigos, A.; Tsekouras, G.E.; Chatzipavlis, A.; Velegrakis, A.F. Modeling Beach Rotation Using a Novel Legendre Polynomial Feedforward Neural Network Trained by Nonlinear Constrained Optimization. In Artificial Intelligence Applications and Innovations; Springer: Cham, Switzerland, 2016; pp. 167–179. [Google Scholar] [CrossRef] [Green Version]
- Iglesias, G.; Lopez, I.; Castro, A.; Carballo, R. Neural network modelling of planform geometry of headland-bay beaches. Geomorphology 2009, 103, 577–587. [Google Scholar] [CrossRef]
- Yates, M.L.; Le Cozannet, G. Brief communication ‘Evaluating European Coastal Evolution using Bayesian Networks’. Nat. Hazards Earth Syst. Sci. 2012, 12, 1173–1177. [Google Scholar] [CrossRef]
- Lentz, E.E.; Hapke, C.J. Geologic framework influences on the geomorphology of an anthropogenically modified barrier island: Assessment of dune/beach changes at Fire Island, New York. Geomorphology 2011, 126, 82–96. [Google Scholar] [CrossRef]
- Hrvatski Hidrografski Institut (HHI). Peljar za Male Brodove—Drugi dio: Sedmovraće—Rt. Oštra; HHI: Split, Croatia, 2020; p. 312. [Google Scholar]
- Mackay, D.J.C. Bayesian Interpolation. Neural Comput. 1992, 4, 415–447. [Google Scholar] [CrossRef]
- Faraway, J.; Chatfield, C. Time series forecasting with neural networks: A comparative study using the airline data. J. R. Stat. Soc. Ser. C Appl. Stat. 1998, 47, 231–250. [Google Scholar] [CrossRef]
- Kolen, J.F.; Pollack, J.B. Back Propagation is Sensitive to Initial Conditions. In Proceedings of the 3rd International Conference on Neural Information Processing Systems, Denver, CO, USA, 26 November 1990; pp. 860–867. [Google Scholar]





| Number | Data | Source | Group |
|---|---|---|---|
| 1 | Longitude | map data | Basic |
| 2 | Latitude | map data | |
| 3 | Beach length | map data | |
| 4 | Beach area | map data | |
| 5 | Beach orientation (azimuth) | map data | |
| 6 | Gravel diameter | survey | Gravel |
| 7 | Beach slope | map data | Slope |
| 8 | Fetch length in NE direction | map data | Fetch |
| 9 | Fetch length in SE direction | map data | |
| 10 | Fetch length in SW direction | map data | |
| 11 | Mean yearly number of days when the wind is stronger than 6 Bf | statistical data from a nearby meteorological station | Wind |
| 12 | Mean yearly number of days when the wind is stronger than 8 Bf | statistical data from a nearby meteorological station | |
| 13 | Mean tide range | statistical data from a nearby oceanographic station | Tide |
| 14 | Mean extreme tide range | statistical data from a nearby oceanographic station | |
| 15 | Yearly mean rainfall | statistical data from a nearby meteorological station | Rainfall |
| T | Yearly beach nourishment | survey | Target |
| a | Name | survey | |
| b | County | survey | |
| c | Region | survey | |
| d | Yearly expenses for nourishment | survey |
| Number | Data | Min | Mean | Max | Dimension |
|---|---|---|---|---|---|
| 1 | Beach length | 12 | 370 | 2000 | meters |
| 2 | Beach area | 32 | 6834.01 | 104,020 | square meters |
| 3 | Beach orientation (azimuth) | 0 | 192.69 | 359 | degrees |
| 4 | Gravel diameter | 1 | 14.82 | 32 | millimeters |
| 5 | Fetch length in NE direction | 0.54 | 1033.98 | 19,259 | meters |
| 6 | Fetch length in SE direction | 0.85 | 4663.27 | 108,701 | meters |
| 7 | Fetch length in SW direction | 0.79 | 11,422.14 | 137,514 | meters |
| 8 | Mean yearly number of days when the wind is stronger than 6 Bf | 12.90 | 48.84 | 123.90 | days |
| 9 | Mean yearly number of days when the wind is stronger than 8 Bf | 0.6 | 9.10 | 33.30 | days |
| 10 | Mean tide range | 0.23 | 0.30 | 0.48 | meters |
| 11 | Mean extreme tide range | 0.29 | 0.42 | 0.67 | meters |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bujak, D.; Bogovac, T.; Carević, D.; Ilic, S.; Lončar, G. Application of Artificial Neural Networks to Predict Beach Nourishment Volume Requirements. J. Mar. Sci. Eng. 2021, 9, 786. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9080786
Bujak D, Bogovac T, Carević D, Ilic S, Lončar G. Application of Artificial Neural Networks to Predict Beach Nourishment Volume Requirements. Journal of Marine Science and Engineering. 2021; 9(8):786. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9080786
Chicago/Turabian StyleBujak, Damjan, Tonko Bogovac, Dalibor Carević, Suzana Ilic, and Goran Lončar. 2021. "Application of Artificial Neural Networks to Predict Beach Nourishment Volume Requirements" Journal of Marine Science and Engineering 9, no. 8: 786. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9080786